Изобретение относится к управлению гидравлической системой, установленной, в частности, в автоматической коробке передач с дискретным изменением передаточного отношения, в частности в автоматической коробке передач, включающей в себя исполнительные механизмы с гидроприводом.
В этих коробках передач, для каждой выбранной скорости, один или несколько исполнительных механизмов, т.е. один или несколько механизмов сцепления или тормозов, подвергаются усилию сжатия, например, для жесткого соединения между элементами эпициклоидальной передачи или для соединения элемента эпициклоидальной передачи с картером коробки передач, чтобы получить необходимое передаточное отношение.
Во время переключения передачи некоторые исполнительные механизмы могут удерживаться в сжатом состоянии, но, по меньшей мере, второй исполнительный механизм постепенно выключается, в то время как первый исполнительный механизм постепенно включается.
Характер пересечения кривой крутящего момента, передаваемого от второго исполнительного механизма, с кривой крутящего момента, передаваемого от первого исполнительного механизма, влияет на крутящий момент, который передается в конечном итоге между ведущим валом и передаточным валом коробки.
Сжатие первого исполнительного механизма включает в себя первый этап выборки зазоров исполнительного механизма, который не позволяет достичь необходимого сжатия для передачи крутящего момента. Затем прижатие друг к другу фрикционных элементов способствует резкому увеличению передаваемого крутящего момента, что может вызвать рывок, который почувствуют пассажиры автомобиля.
В патентной заявке FR 2689595 для этого предлагается питать исполнительный механизм при помощи механического клапана, обеспечивающего питание исполнительного механизма либо через жиклер малого калибра, либо через жиклер большого калибра.
Меняя калибр жиклера, можно таким образом замедлить подъем давления в исполнительном механизме.
При этом включение исполнительного механизма начинается с фазы быстрого заполнения, за которой следует фаза более медленного заполнения с использованием жиклера малого калибра и с одновременным использованием демпфера расхода, тоже соединенного с исполнительным механизмом.
Это решение может быть предложено для коробок передач на стадии проектирования, но является сложным для применения при исправлении недостатка плавности работы на уже существующей коробке передач.
Помимо этого, кривую передачи крутящего момента первого исполнительного механизма практически невозможно модулировать, так как можно менять только момент перехода между положениями, соответствующими одному или другому жиклеру.
В патентной заявке FR 2570458 описано также устройство регулирования автоматической трансмиссии с гидравлическим исполнительным механизмом, в которой во время переключения скоростей питание одного или нескольких активных исполнительных механизмов осуществляется последовательно через отверстие с большим проходным сечением, чтобы обеспечить быстрое заполнение, затем через отверстие с малым проходным сечением для обеспечения плавности, а затем опять через отверстие с большим проходным сечением, чтобы обеспечить блокировку исполнительного механизма.
Гидравлическая система получает питание с первым значением линейного давления на заднем ходу, в нейтральном положении и в положении парковки и со вторым значением линейного давления для всех передних передач.
Также как и в предыдущем случае, данная конфигурация применима только на коробках передач, разработанных изначально с жиклерами, адаптированными для питания исполнительных механизмов с разными значениями расхода. Эта конфигурация остается ограниченной с точки зрения запаса маневра для регулирования плавности подъема давления первого исполнительного механизма.
Задача изобретения состоит в создании устройства управления автоматической трансмиссией с гидравлическим исполнительным механизмом, которое может быть адаптировано посредством совсем незначительных конструктивных изменений к уже существующим коробкам передач и которое позволяет регулировать в режиме реального времени плавность передачи крутящего момента коробки.
Для этого, изобретением предложена гидравлическая система, в частности, для автоматической трансмиссии автотранспортного средства, содержащая гидравлические исполнительные механизмы типа сцепления и/или тормозов, питаемые с одинаковым линейным давлением от одной и той же гидравлической сети. Эта система содержит электронный блок управления, выполненный таким образом, чтобы создавать временное падение линейного давления во время операции включения одного из исполнительных механизмов в момент изменения состояния системы, в частности во время изменения передаточного отношения при переходе от первой передачи ко второй.
Гидравлическая система может, например, входить в состав автоматической коробки передач для автомобилей. Гидравлическая система может содержать второй исполнительный механизм, соответствующий первой передаче и получающий питание через второй последовательный клапан, и может содержать первый исполнительный механизм, соответствующий второй передаче и получающий питание через первый последовательный клапан. Электронный блок управления может быть выполнен таким образом, чтобы во время переключения передачи изменять состояние первого последовательного клапана для включения первого исполнительного механизма и чтобы приводить в действие третий клапан, который может вызывать временное падение линейного давления. Падение давления происходит во время операции включения первого исполнительного механизма. Это значит, что падение линейного давления происходит в промежутке времени между:
- началом открывания первого последовательного клапана и
- фазой блокировки первого исполнительного механизма.
Под термином «фаза блокировки» подразумевается момент, когда давление в поршне, приводящем в действие исполнительный механизм, достигает своего максимального значения в течение процесса включения исполнительного механизма.
Предпочтительно, падение давления по существу начинается в момент, когда первый исполнительный механизм начинает передавать крутящий момент на передаточный вал, и по существу заканчивается, когда первый исполнительный механизм может передавать полностью крутящий момент, который он должен передавать после переключения передачи.
Считается, что первый и/или второй последовательные клапаны открыты, когда они подают давление на соответствующие исполнительные механизмы. Согласно предпочтительному варианту выполнения, коробка передач может иметь пять исполнительных механизмов, а именно три сцепления и два тормоза, позволяющих контролировать один или несколько блоков эпициклоидальных зубчатых передач. Каждое передаточное отношение, которое может быть включено на коробке, называемое также передачей, может быть связано с одним или несколькими исполнительными механизмами, например, с двумя исполнительными механизмами.
Под сцеплением подразумевается устройство, позволяющее жестко соединить два вращающихся элемента между собой, а под тормозом - устройство, позволяющее жестко соединить один вращающийся элемент по отношению к картеру коробки передач. Согласно предпочтительному варианту выполнения, падение линейного давления может быть использовано во время перехода под нагрузкой от первой передней передачи коробки передач ко второй передней передаче коробки. Во время перехода от первой ко второй передней передаче коробки в первом сцеплении может происходить сброс давления, в то время как во втором сцеплении происходит повышение давления, и тормоз может удерживаться включенным во время переключения передачи, при этом тормоз был уже включен, когда была включена первая передача.
Первый исполнительный механизм может получать питание через первый последовательный клапан и может содержать аккумулятор давления, соединенный на выходе первого последовательного клапана параллельно с первым исполнительным механизмом. Блок управления выполнен, например, с возможностью подачи команды на заполнение аккумулятора во время операции включения первого исполнительного механизма таким образом, чтобы распределить жидкость, выходящую из первого последовательного клапана, между аккумулятором давления и первым исполнительным механизмом, а также замедлить подъем давления в первом исполнительном механизме.
Согласно предпочтительному варианту выполнения, электронный блок управления выполнен с возможностью доведения линейного давления от номинального значения, применяемого до переключения передачи, до минимального значения, достигнутого во время фазы заполнения аккумулятора давления, а также с возможностью последующего постепенного повторного увеличения линейного давления до момента, когда оно опять достигнет номинального значения до завершения заполнения аккумулятора давления.
Согласно предпочтительному варианту выполнения, электронный блок управления выполнен с возможностью запуска процесса заполнения аккумулятора в момент после открытия первого последовательного клапана и с возможностью запуска процесса заполнения аккумулятора предпочтительно по существу в тот же момент, когда блок управления подает команду на закрытие второго последовательного клапана.
Предпочтительно, блок управления выполнен таким образом, чтобы во время переключения передачи произвести слив жидкости из второго исполнительного механизма для выключения второго исполнительного механизма, а также для понижения линейного давления от номинального значения до минимального значения таким образом, чтобы начало падения давления происходило не раньше и предпочтительно после начала слива жидкости из второго исполнительного механизма. Опорожнение второго исполнительного механизма может быть начато во время заполнения аккумулятора и первого исполнительного механизма и может быть ускорено во время передачи крутящего момента первого исполнительного механизма, например, когда обнаруживается отклонение кривой режима вращения турбины.
Согласно предпочтительному варианту выполнения, блок управления выполнен с возможностью подачи команды на понижение линейного давления от номинального значения до минимального значения таким образом, чтобы минимальное значение давления было достигнуто не позже, чем первый исполнительный механизм начнет передавать крутящий момент.
Электронный блок управления может, например, быть выполнен таким образом, чтобы задавать профиль повторного повышения давления к его номинальному значению в зависимости от переменных величин, включающих в себя, в частности, скорость вращения турбины преобразователя крутящего момента, крутящий момент, выдаваемый турбиной, и температуру масла гидравлической системы. Считается, что линейное давление регулируется в зависимости от указанных переменных величин, если им управляют в зависимости от этих величин или в зависимости от величин, пропорциональных этим переменным величинам, или в зависимости от переменных величин, позволяющих рассчитать указанные переменные величины.
Согласно предпочтительному варианту выполнения, гидравлическая система содержит модулирующий электроклапан, способный вызывать падение линейного давления во время переключения передачи. Модулирующий электроклапан может подавать модулированное давление управления на клапан регулировки давления. Клапан регулировки давления может подавать в контур дифференциальное давление или линейное давление, пропорциональное модулированному давлению управления, при помощи гидравлической энергии, обеспечиваемой насосом. Модулирующий электроклапан можно было бы заменить пропорциональным электроклапаном, который сам управляет клапаном регулировки давления. Это решение, однако, является более затратным. Под модулирующим электроклапаном подразумевается клапан, способный полностью перекрывать периодически давление в гидравлической системе в зависимости от электрического сигнала, который он получает, тем самым устанавливая разное гидравлическое давление на выходе модулирующего клапана. Под пропорциональным электроклапаном подразумевается электроклапан, способный обеспечивать изменение проходного гидравлического сечения в зависимости от электрического сигнала, который он получает, тем самым устанавливая переменное гидравлическое давление на выходе пропорционального электроклапана. Согласно предпочтительному варианту выполнения, первый и второй последовательный клапаны являются последовательными электроклапанами. Конструкция последовательных электроклапанов, модулирующих электроклапанов, пропорциональных электроклапанов и клапанов регулировки известна. Давление жидкости, питающей модулирующий электроклапан, можно регулировать при помощи входного клапана регулировки давления, что позволяет подавать в модулирующий клапан постоянное давление ниже линейного давления. Входной клапан регулировки может также подавать давление управления на концы последовательных электроклапанов, обеспечивая тем самым движущую силу, необходимую для перемещения золотников последовательных электроклапанов. Последовательные электроклапаны можно приводить в действие, вызывая при помощи электропривода утечку на одном или другом из концов золотника таким образом, чтобы золотник перемещался под действием давления, подаваемого на противоположный конец.
Предпочтительно, система дополнительно содержит четвертый последовательный клапан, который, учитывая уже существующие гидравлические соединения, может быть установлен между вторым исполнительным механизмом и резервуаром и который может занимать первое положение, обеспечивающее первую скорость опорожнения исполнительного механизма через первое отверстие, и второе положение, обеспечивающее вторую скорость опорожнения исполнительного механизма, более низкую, чем первая, через второе отверстие с меньшим сечением. Согласно предпочтительному варианту выполнения, этап разгрузки второго исполнительного механизма начинается с перевода четвертого клапана сначала во второе положение, затем в первое положение.
Объектом изобретения является также способ управления гидравлической системой, в частности, гидравлической системой для автомобильной трансмиссии. Гидравлическая система включает в себя, по меньшей мере, один первый и один второй гидравлические исполнительные механизмы, питание каждого из которых обеспечивается от линейного давления гидравлического контура при помощи, по меньшей мере, одного последовательного клапана. Во время подъема давления первого исполнительного механизма в момент переключения передач обеспечивают временное понижение линейного давления.
Согласно предпочтительной последовательности этапов заявленного способа, открывают последовательный клапан, выполненный с возможностью подачи питания одновременно на первый исполнительный механизм и аккумулятор давления, затем запускают заполнение аккумулятора давления и начинают опорожнение второго исполнительного механизма, затем понижают линейное давление, после чего до завершения заполнения аккумулятора давления доводят линейное давление по существу до его первоначального значения.
Другие задачи, особенности и преимущества изобретения будут изложены в нижеследующем описании, представленном исключительно в качестве неограничивающего примера, со ссылками на приложенные чертежи.
На фиг. 1 представлена схема гидравлической системы коробки передач согласно изобретению;
на фиг. 2 показано изменение по времени некоторых основных переменных величин коробки передач, показанной на фиг. 1, в момент переключения передачи в соответствии с изобретением.
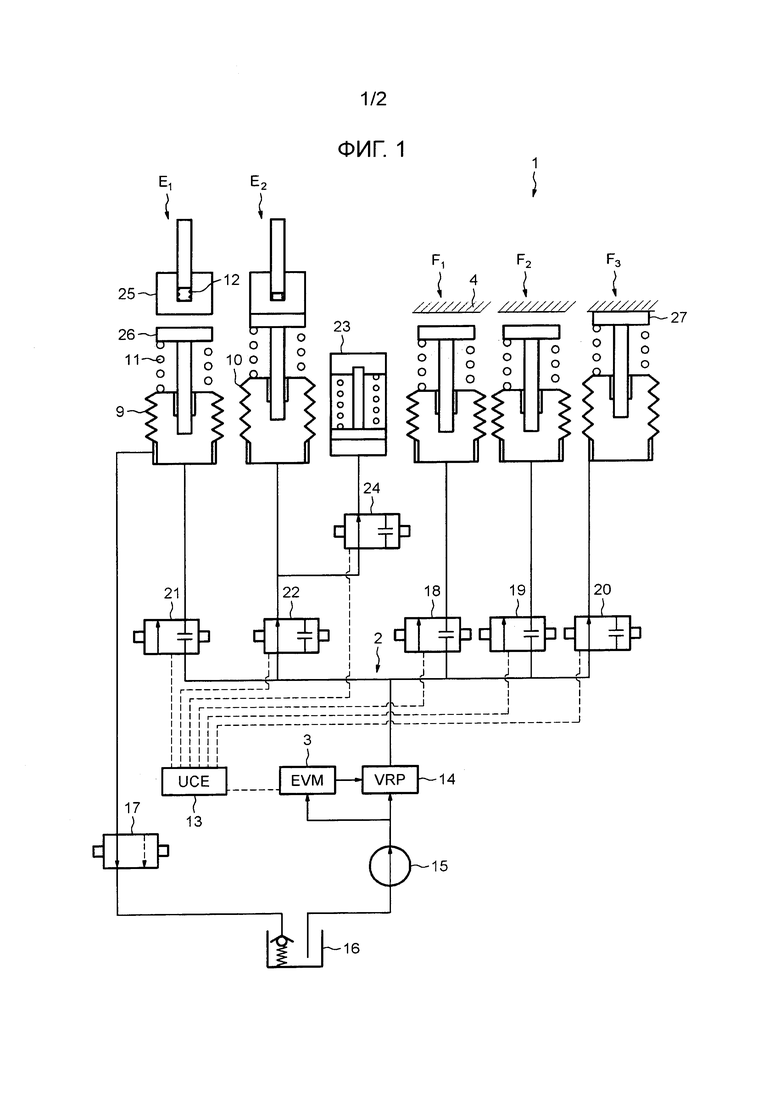
Как это показано на фиг. 1, гидравлическая система 1 автоматической коробки передач включает в себя блок исполнительных механизмов E1, Е2, F1, F2, F3, которые соответствуют, например, первому сцеплению, второму сцеплению, первому тормозу, второму тормозу, третьему тормозу.
Каждое сцепление E1 и Е2 может, например, обеспечивать жесткое соединение двух подвижных элементов, например, вращающихся элементов коробки передач, или, например, двух элементов блока эпициклоидальной зубчатой передачи. Каждый из тормозов F1, F2, F3 может, например, обеспечивать соединение подвижного элемента коробки передач 1, например, элементов блока эпициклоидальной зубчатой передачи, с неподвижным картером 4 коробки передач 1. Сцепление E1 может также соединять подвижный элемент 25 с подвижным элементом 26, и тормоз F3 может соединять подвижный элемент 27 с картером 4 коробки 1. Блок эпициклоидальной зубчатой передачи позволяет передавать на передаточный вал коробки (не показан) вращательное движение и крутящий момент, полученные посредством уменьшения числа оборотов и крутящего момента, поступающего на блок эпициклоидальной зубчатой передачи от турбины гидравлического преобразователя крутящего момента (не показана), расположенной на входе в коробку. Гидравлический преобразователь крутящего момента позволяет добавить один уровень дополнительного понижения числа оборотов перед эпициклоидальной передачей и позволяет также выполнять роль торсионного фильтра между двигателем, с которым соединена коробка передач, и колесами автомобиля.
Каждый из исполнительных механизмов Е1, Е2, F1, F2, F3 приводится в действие гидравлическим поршнем, обозначенным позицией 9 для сцепления E1 и позицией 10 для сцепления Е2.
Поршень может прижать друг к другу два элемента, например, 25, 26, коробки передач, под действием давления гидравлической системы, которое поступает на него через последовательный электроклапан.
Первое сцепление E1 управляется, таким образом, через последовательный электроклапан 21, позволяющий привести в действие поршень 9, второе сцепление Е2 приводится в действие через последовательный электроклапан 22, позволяющий привести в действие поршень 10, тормоза F1, F2, F3 соответственно приводятся в действие через последовательные электроклапаны 18, 19 и 20.
Эти последовательные электроклапаны позволяют передавать на поршни линейное давление Pligne, которое распределяется через гидравлическую сеть 2, питаемую через насос 15. Каждый исполнительный механизм можно опорожнить для того, чтобы снизить его гидравлическое давление, перенаправляя гидравлическую жидкость, поступающую из гидравлического контура 2, в резервуар 16 с нулевым давлением.
Во время подачи давления на поршень, например, на поршень 9, он начинает перемещаться для того, чтобы прижать два элемента друг к другу, например, элементы 25, 26 исполнительного механизма.
Подъем давления в области контакта двух элементов, например, 25, 26 зависит одновременно от хронологии подъема давления поршня и хронологии выбирания зазора и сжатия упругих элементов 11, 12 исполнительного механизма.
Для того чтобы сделать более плавным подъем давления на границе контакта подвижных элементов, в гидравлическом контуре 2 установлен аккумулятор давления 23 таким образом, чтобы его можно было бы подсоединить параллельно как минимум к одному из исполнительных механизмов, например, Е2, во время его заполнения, на выходе соответствующего электроклапана, например, электроклапана 22.
Гидравлические соединения показаны на фигуре 1 в упрощенном виде, в частности, не представлены все отводы гидравлического масла в резервуар 16.
Исполнительные механизмы E1, Е2, F1, F2, F3 можно подсоединять таким образом, чтобы можно было сбросить гидравлическое давление путем отвода жидкости в резервуар 16, которая может проходить через клапан плавного включения 17. Клапан плавного включения 17 является последовательным электроклапаном, который может быть установлен или в положение слива через первое отверстие малого диаметра, или в положение слива через второе отверстие большего диаметра, чем у первого отверстия.
В примере, представленном на фиг. 1, по меньшей мере, первое сцепление Е1 соединено таким образом с резервуаром 16 посредством циркуляции жидкости через клапан плавного включения 17. Заполнение аккумулятора давления 23 можно запустить или прервать при помощи последовательного электроклапана 24. Линейное давление в гидравлическом контуре 2 можно задавать при помощи клапана регулировки давления 14, создавая разность давления по отношению к давлению, создаваемому насосом 15, при этом клапан регулировки давления 14 сам управляется давлением управления, поступающим от модулирующего электроклапана 3.
Модулирующий электроклапан 3 является электроклапаном, способным создавать на своем выходе давление управления, получаемое благодаря быстрым циклам полного открывания и полного закрывания клапана, обеспечивая таким образом «отсекание» давления, передающегося через клапан 3.
Давление жидкости, питающей модулирующий электроклапан 3, можно регулировать при помощи входного клапана регулировки давления (не показан), что позволяет подавать на модулирующий клапан постоянное давление ниже линейного давления. Входной клапан регулировки давления может также обеспечивать давление на концах последовательных электроклапанов 18, 19, 20, 21, 22, 24, чтобы создавать необходимую движущую силу для перемещения золотников этих последовательных клапанов.
Последовательные электроклапаны можно, например, приводить в действие, создавая при помощи электромагнитного привода утечку гидравлической жидкости на одном или другом конце золотника последовательного электроклапана, чтобы перемещать золотник под действием давления, подаваемого на противоположный конец золотника.
Электронный блок управления 13 соединен с каждым последовательным клапаном 17, 18, 19, 20, 21, 22, 24, и с модулирующим электроклапаном 3.
Электронный блок управления 13 получает от вычислительного устройства, соединенного с датчиками скорости, информацию о скорости вращения двигателя и о скорости вращения ведущего вала коробки передач. Эти данные о скорости позволяют рассчитать крутящий момент, предаваемый на ведущий вал через преобразователь крутящего момента, гидравлически связанный с этим ведущим валом (не показаны). Именно разность скоростей двигателя и ведущего вала, называемая сдвигом, вызывает увеличение крутящего момента в преобразователе крутящего момента.
Электронный блок управления 13 передает на различные клапаны сигналы управления. Эти сигналы управления позволяют, в частности, изменять линейное давление в контуре 2, регулируемое модулирующим электроклапаном 3. Они также позволяют сжимать и/или разжимать исполнительные механизмы Е1, Е2, F1, F2, F3, чтобы переводить коробку передач в конфигурацию, соответствующую необходимому передаточному отношению.
Для упрощения фиг. 1, система питания механизмов переключения E1, Е2, F1, F2, F3 сведена к питанию «on-off» (включено-выключено) посредством последовательных электроклапанов 18, 19, 20, 21, 22. На практике, когда один из последовательных электроклапанов перекрывает питание связанного с ним исполнительного механизма линейным давлением из гидравлического контура 2, электронный блок управления 13 дает одновременно команду тому же механизму на соединение с резервуаром, соответственно через клапан плавного переключения, посредством гидравлического соединения, которое представлено только для исполнительного механизма Е1.
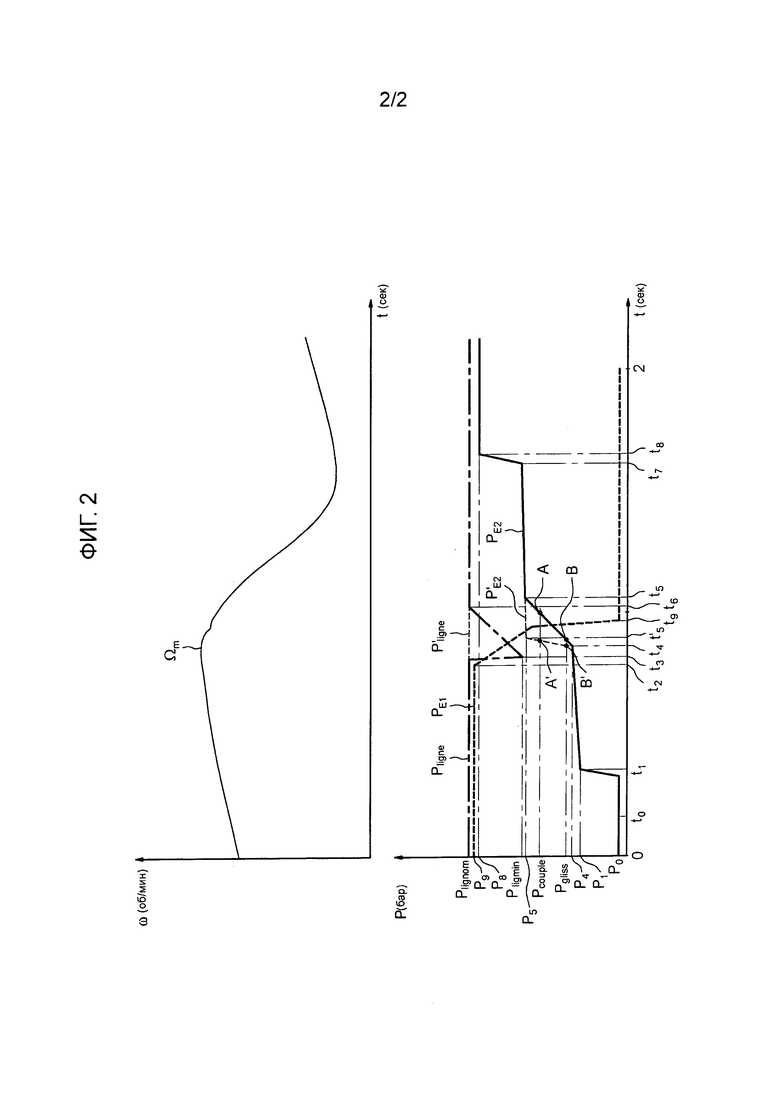
На фиг. 2 показаны в зависимости от времени кривые некоторых основных значений работы коробки передач, показанной на фиг. 1, во время перехода на повышенную передачу под нагрузкой, с первой передней скорости коробки на вторую переднюю скорость коробки.
На фиг. 2 в качестве примера представлена кривая изменения режима вращения ведущего вала коробки.
Фиг. 2 иллюстрирует таким образом первую кривую Ωm, показывающую изменение скорости вращения турбины гидравлического преобразователя крутящего момента, установленного на входе коробки.
Вторая группа кривых воспроизводит изменения давления в зависимости от времени в одной и той же шкале времени. Кривая Pligne (или P'ligne) указывает таким образом изменения линейного давления, например, в барах, в момент переключения передачи. Кривая PE1 указывает изменения давления на поверхности сцепления исполнительного механизма Е1. Под «поверхностью сцепления» следует понимать, например, границу контакта между поверхностями трения, которые под действием гидравлического давления поршня 9 могут вступать в контакт между собой, чтобы передавать крутящий момент, проходящий через исполнительный механизм Е1. Давление PE1 можно, например, измерять при помощи датчика давления, установленного внутри поршня 9.
Кривая PE2 отображает изменения давления между элементами границы контакта первого исполнительного механизма Е2. Давление PE2 можно, например, измерять при помощи датчика давления, установленного внутри поршня 10.
Кривая, отмеченная пунктиром, Р'E2 показывает изменения давления между этими же контактными элементами первого исполнительного механизма Е2 в коробке передач, управляемой в соответствии с известной процедурой. Эта кривая Р'E2 накладывается в большей части на кривую PE2, кроме центральной части двух кривых.
Как видно на фиг. 2, принцип управления переключением передачи состоит в том, чтобы понизить давление сжатия PE1 второго исполнительного механизма от первоначального значения Р9, которое соответствует значению его блокировки, до нулевого значения, достигнутого в момент tg. В то же самое время электронный блок управления 13 управляет различными клапанами таким образом, чтобы увеличить давление сжатия PE2 (или Р'E2) от нулевого значения до значения давления сжатия PS.
После пересечения двух кривых давления сжатия второго исполнительного механизма E1 и первого исполнительного механизма Е2, режим работы двигателя постепенно снижается, чтобы достичь кривой режима, совместимой со скоростью вращения передаточного вала, связанного с колесами автомобиля. Соответственно, скорость Ωm вращения турбины уменьшается.
В идеале, во время передачи крутящего момента от исполнительного механизма E1 к исполнительному механизму Е2, полный крутящий момент, установившийся на передаточном валу коробки, после прохождения через минимум, должен бы следовать кривой, которая стремится подняться к заданной кривой, зависящей от скорости вращения колес автомобиля, причем этот подъем является непрерывным и достаточно равномерным, чтобы не создавать чувство дискомфорта для пассажиров автомобиля.
Кривые PE1, Р'E2 и P'ligne демонстрируют пример переключения передачи, как это происходит на известных коробках передач, имеющих, например, конструкцию, подобную той, что представлена на фиг. 1.
Линейное давление P'ligne поддерживается практически постоянным и зависит от крутящего момента на колесе, задаваемого водителем. В момент t0, блок управления 13 направляет сигнал на начало включения первого исполнительного механизма Е2. Например, он направляет сигнал на последовательный электроклапан 22, который переходит в открытое положение и тем самым обеспечивает прохождение жидкости с линейным давлением Pligne из гидравлического контура 2 к поршню 10 исполнительного механизма Е2. Давление на границе контакта исполнительного механизма Е2 быстро увеличивается до значения первого давления Р1, которого оно достигает в момент t1. Между моментами t1 и t4, давление на границе контакта механизма переключения Е2 увеличивается медленнее, чем при предыдущем подъеме давления до момента t1, пока не будет достигнуто давление Р4 в момент t4.
Это более медленное увеличение в интервале t1-t4 соответствует фазе выбирания зазора и сжатию некоторых упругих элементов, входящих в состав исполнительного механизма Е2, таких как, например, пружина сжатия 12. В момент t2, находящийся в интервале между t1 и t3, электронный блок управления 13 посылает сигнал в последовательный электроклапан 24, расположенный на входе аккумулятора давления 23, чтобы обеспечить заполнение аккумулятора давления 23. С этого момента t2 жидкость, проходящая через последовательный электроклапан 22, распределяется между исполнительным механизмом Е2 и аккумулятором давления 23.
Таким образом, подъем давления механизма переключения Е2 замедляется. В момент t4, когда зазоры механизма переключения Е2 выбраны, крутизна изменения давления границы контакта исполнительного механизма Е2 по отношению к времени увеличивается до момента t5, когда давление границы контакта Р'E2 исполнительного механизма Е2 достигает значения Р5, которое по существу соответствует сбалансированному давлению, которое устанавливается во время заполнения аккумулятора. Аккумулятор давления 23 продолжает в это время заполняться. Когда аккумулятор 23 заполнен, в момент t7, давление Pligne почти полностью передается до уровня давления границы контакта исполнительного механизма Е2. Наблюдается последнее резкое увеличение давления Р'E2 границы контакта в промежуток между моментами t7 и t8, когда это давление Р'E2 достигает максимального давления P8, которое превышает или равно давлению блокировки исполнительного механизма Е2.
Во время подъема давления Р'E2 элементов границы контакта исполнительного механизма Е2 между моментами t4 и t'5, давление границы контакта постепенно переходит через первое значение Pgliss и второе значение давления Pcouple,которое соответственно совпадает с давлением, когда исполнительный механизм Е2 начинает передавать крутящий момент, и с давлением, когда исполнительный механизм Е2 передает полностью крутящий момент, который он получает. Точки кривой Р'E2, которые соответствуют началу передачи крутящего момента и моменту, когда исполнительный механизм достигает своей полной способности передавать крутящий момент, обозначены соответственно точками А' и В*.
Плавность передачи крутящего момента через первый исполнительный механизм Е2 зависит при этом от крутизны кривой давления границы контакта исполнительного механизма Е2 между давлениями Pgliss и Pcouple. Плавность будет лучше, если участок крутизны кривой, заключенный между значениями давлений Р4 и Р5, может быть приведен к умеренным значениям.
В момент t3, который по существу соответствует моменту t2 и предшествует моменту t4, электронный блок управления 13 направляет сигнал на последовательный электроклапан 21, чтобы перевести его в закрытое положение и прекратить питание линейным давлением Pligne, поступающим из гидравлического контура 2.
Одновременно, электронный блок управления 13 направляет сигнал на последовательный электроклапан 17 для обеспечения опорожнения исполнительного механизма E1 через отверстие малого сечения последовательного электроклапана 17.
Давление PE1 границы контакта исполнительного механизма E1 снижается до момента ttrans, следующего за моментом t4. Блок электронного управления направляет тогда другой сигнал на последовательный электроклалан 17, обеспечивая таким образом слив жидкости из исполнительного механизма E1 через отверстие большого сечения электроклапана 17.
Падение давления границы контакта второго механизма переключения E1 ускоряется до момента достижения нулевого значения.
Момент ttrans может, например, быть выбран таким образом, чтобы по существу соответствовать моменту t'5.
Блок электронного управления 13 может, например, быть выполнен таким образом, чтобы начать быстрый слив жидкости из исполнительного механизма Е1, когда обнаруживается изменение режима вращения турбины преобразователя крутящего момента коробки. Это изменение вызывается нарастанием крутящего момента, передаваемого первым исполнительным механизмом Е2.
Вследствие быстрого роста давления границы контакта Е2 в промежутке между моментами t4 и t'5, пересечение кривых PE1 и Р'E2 происходит в основном за пределами интервала давления между Pgliss и Pcouple.
Иными словами, исполнительный механизм E1 продолжает передавать крутящий момент в то время, как исполнительный механизм Е2 уже приведен в действие. Это вызывает скачок крутящего момента, неприятное действие которого может ощущаться пассажирами автомобиля.
Кривые PE1 PE2 и Pligne демонстрируют пример переключения передачи на коробке передач в соответствии с изобретением, показанной на фиг. 1, при помощи способа согласно изобретению.
Чтобы сделать более плавным подъем давления исполнительного механизма Е2 между давлениями Pgliss и Pcouple, электронный блок управления 13 согласно изобретению управляет модулирующим электроклапаном 3 таким образом, чтобы создать временное падение линейного давления Pligne во временном интервале t3-t6, при этом момент t3 предшествует, например, моменту t4 окончания выбирания зазоров на кривой давления границы контакта механизма переключения Е2, или по существу с ним совпадает.
Вследствие этого временного падения линейного давления крутизна подъема давления на границе контакта исполнительного механизма Е2 ниже, чем в варианте управления, описанном со ссылками на кривую Р'E2. Давление границы контакта исполнительного механизма Е2 достигает при этом давления Р5 в момент t5, следующий за моментом t'5.
Таким образом, кривые PE1 PE2 могут пересекаться в интервале давления Pgliss и Pcouple. Передача крутящего момента первым исполнительным механизмом Е2 происходит более плавно и позволяет электронному блоку управления подать команду на быстрое опорожнение исполнительного механизма E1 до того, как первый исполнительный механизм Е2 достигнет своего давления Pcouple для полной передачи крутящего момента. В этом случае пассажиры автомобиля будут меньше ощущать передачу крутящего момента первым исполнительным механизмом Е2. Точки кривой PE2, соответствующие началу передачи крутящего момента и моменту, когда исполнительный механизм достигнет своей полной мощности передачи крутящего момента, обозначены соответственно точками А и В. Когда используют способ управления гидравлической системой согласно изобретению, кривые PE1 и PE2 могут пересекаться между точками А и В, что является одним из требуемых критериев для достижения перехода с одной скорости на другую без резких скачков крутящего момента.
Падение линейного давления можно, например, запустить в момент t3, близкий к t4, который определяют путем предварительных испытаний на стенде или на автотранспортном средстве. Предпочтительно t3 слегка запаздывает по сравнению с моментом t2, когда блок электронный управления t3 направляет первый сигнал слива жидкости из исполнительного механизма E1, таким образом, чтобы не мешать началу слива жидкости из исполнительного механизма Е1.
Несмотря на то, что кривая Pligne, изображенная на фиг. 2, показывает почти моментальное допустимое падение линейного давления, - вплоть до минимального давления падения Pligmin, - инерция гидравлической системы такова, что на практике линейное давление распространяется довольно плавно. Начиная от достигнутого минимального давления Pligmin, электронный блок управления 13 снова поднимает давление до достижения начального значения Plignom линейного давления. Новый подъем давления PE2 границы контакта, даже если и происходит более медленно, несмотря на падение линейного давления, длительность падения давления, то есть момент t6, выбирают таким образом, чтобы он по существу совпадал с моментом, когда давление PE2 границы контакта достигнет давления Pcouple, при котором исполнительный механизм Е2 передает весь крутящий момент, поступающий на вход коробки передач. Новый подъем линейного давления позволяет таким образом более эффективно модулировать кривую передачи крутящего момента исполнительного механизма Е2.
Во время перехода от первой скорости ко второй, который продолжается по существу от 2 до 3 секунд, падение давления может, как правило, длиться (временной интервал t3-t6) от 0,1 до 0,5 секунд, предпочтительно от 0,15 до 0,3 секунд, и может иметь амплитуду (амплитуда давления Pligmin - Plignom) от 0,2 до 2 бар, преимущественно от 0,5 и 1 бар. Достигнутое минимальное линейное давление Pligmin предпочтительно должно превышать давление Pcouple, которое позволяет первому исполнительному механизму Е2 полностью передавать крутящий момент, поступающий от турбины. Предпочтительно минимальное давление должно оставаться выше давления разблокировки, которое можно определить, как самое низкое линейное давление, при котором исполнительный механизм или исполнительные механизмы, которые должны оставаться включенными во время переключения передачи, не могут выключиться из-за падения линейного давления. Давление разблокировки и линейное давление зависят, как одно, так и другое, от крутящего момента, передаваемого коробкой передач до перехода с одной передачи на другую.
Изобретение не сводится только к описанному примеру выполнения и может охватывать множество других вариантов. Подача питания на каждый исполнительный механизм может частично регулироваться положением механического клапана, который связан с рычагом переключения скоростей и который обеспечивает или препятствует определенным соединениям каждого из электроклапанов управления с различными точками гидравлического контура 2.
Последовательные электроклапаны 18, 19, 20, 21, 22, соединенные с каждым исполнительным механизмом, можно заменить последовательными клапанами, гидравлически управляемыми другими клапанами, которыми управляет электронный блок управления 13.
Модулирующий электроклапан 3 можно заменить пропорциональным электроклапаном, как правило, более дорогим, чем модулирующие клапаны. И даже в этом случае это решение будет менее затратным по сравнению с некоторыми существующими системами, где каждым исполнительным механизмом управляет пропорциональный электроклапан.
Аккумулятор давления 23, заполнение которого в данном примере начинается, как только подана команда на повышение давления первого исполнительного механизма Е2, мог бы начать свое заполнение в момент открытия последовательного электроклапана 22. Для этого необходимо, чтобы аккумулятор давления обладал достаточной емкостью, чтобы достичь фазы своего заполнения, только когда давление контактной поверхности исполнительного механизма Е2 превысит давление Pcouple.
Опорожнение второго исполнительного механизма переключения Ei можно производить через одно и то же сливное отверстие.
Форма заданной кривой в момент падения давления может быть отличной от показанной на чертежах, в частности, что касается кривой повторного подъема давления, которую можно построить таким образом, чтобы передача крутящего момента происходила согласованно с кривой снижения режима вращения турбины преобразователя крутящего момента. Кривую повторного подъема давления можно, таким образом, задавать в соответствии с кривой, рассчитанной, например, в зависимости от температуры масла в коробке передач, от скорости вращения турбины, и от крутящего момента, переданного турбиной на эпициклоидальную зубчатую передачу.
Этот способ можно применять и к другим случаям переключения передач, отличным от перехода с первой скорости на вторую. Способ можно применять для управления гидравлическими исполнительными механизмами эпициклоидальной передачи в какой-либо редукторной системе, отличной от автомобильной коробки передач.
Заявленный способ управления автоматическими коробками передач можно применять на существующих коробках передач, включающих в себя последовательные электроклапаны, соединенные с каждым исполнительным механизмом, и содержащих гидравлический контур, линейным давлением которого управляет модулирующий электроклапан.
Таким образом, путем простой адаптации при помощи программных средств можно улучшить для пассажиров восприятие переключений передач, сохраняя при этом существующую конфигурацию коробки передач.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система управления трансмиссией | 1990 |
|
SU1791173A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2009 |
|
RU2434152C1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814840C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РЕГУЛИРОВАНИЯ ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ КЛАПАНА В РЕЖИМЕ МОДУЛИРУЮЩЕЙ ЧАСТОТЫ | 1995 |
|
RU2110006C1 |
| Гидравлическая система управления коробкой передач транспортного средства | 1974 |
|
SU660577A3 |
| Гидросистема управления гидромеханической коробкой передач транспортного средства | 1987 |
|
SU1533898A1 |
| Гидравлическая система управления фрикционными элементами трансмиссии транспортного средства | 1983 |
|
SU1184705A1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814642C1 |
| СПОСОБ ГИДРАВЛИЧЕСКОГО УСИЛЕНИЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА НА НИЗКОЙ СКОРОСТИ | 2015 |
|
RU2690833C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ГИДРАВЛИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЕ АВТОМАТИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2053149C1 |
Изобретение относится к гидравлической системе автоматической трансмиссии. Гидравлическая система (1) содержит гидравлические исполнительные механизмы (Е1, Е2, F1, F2, F3) типа сцепления и/или тормозов, питаемые с одинаковым линейным давлением (Pligne) от одного и того же гидравлического контура (2). Система содержит электронный блок управления (13), выполненный так, чтобы создавать временное падение линейного давления (Pligne) во время операции включения (t0-t8) одного из исполнительных механизмов (Е2) в момент изменения состояния системы, в частности во время изменения передаточного отношения при переходе от первой передачи ко второй. Достигается плавность регулирования передачи крутящего момента. 2 н. и 6 з.п. ф-лы, 2 ил.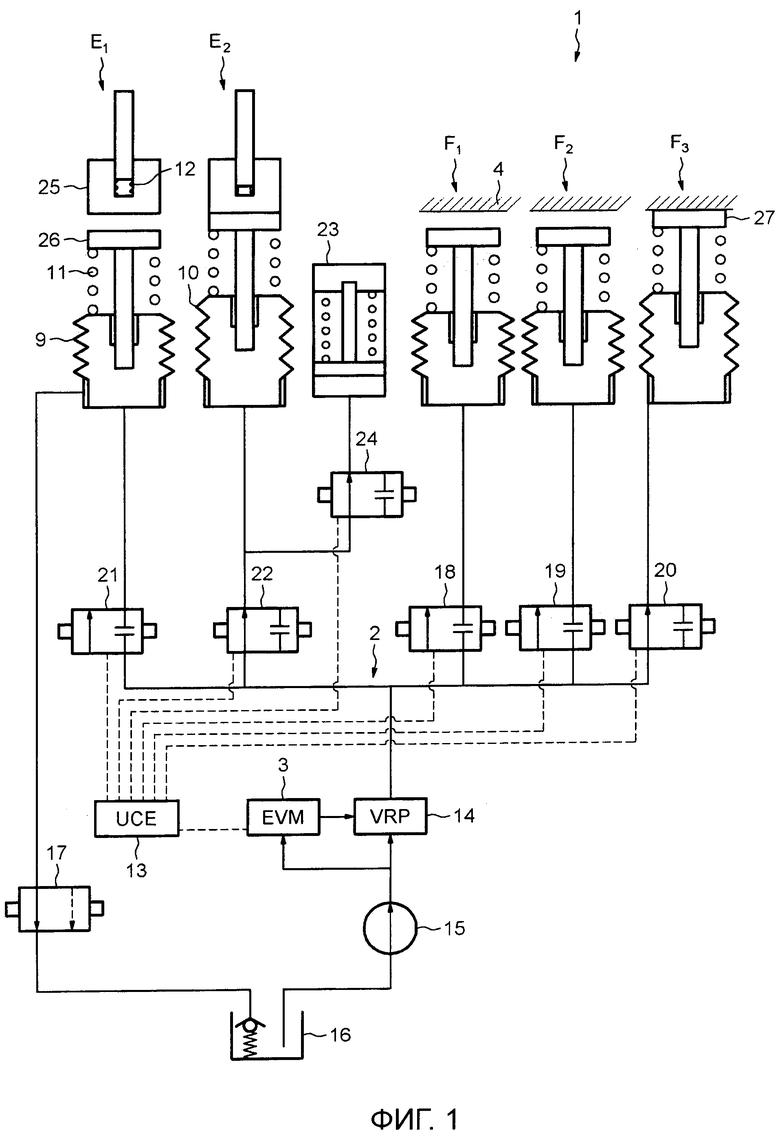
1. Гидравлическая система (1), в частности для автоматической трансмиссии автотранспортного средства, содержащая
- гидравлические исполнительные механизмы (E1, E2, F1, F2, F3) типа сцепления и/или тормозов, питаемые с одинаковым линейным давлением (Pligne) от одного и того же гидравлического контура (2),
- электронный блок управления (13), выполненный с возможностью создавать временное падение линейного давления (Pligne) во время операции включения (t0-t8) одного из исполнительных механизмов (E2) в момент изменения состояния системы, в частности во время изменения передаточного отношения при переходе от первой передачи ко второй, при этом первый исполнительный механизм (E2) получает питание через первый последовательный клапан (22),
- аккумулятор давления (23), соединенный на выходе первого последовательного клапана (22) параллельно с первым исполнительным механизмом (E2),
причем блок управления (13) выполнен с возможностью подачи команды на заполнение (t2-t8) аккумулятора (23) во время операции включения (t0-t8) первого исполнительного механизма (E2) так, чтобы распределять жидкость, выходящую из первого последовательного клапана (22), между аккумулятором давления (23) и первым исполнительным механизмом (E2), и замедлять подъем давления в первом исполнительном механизме (E2), при этом электронный блок управления (13) выполнен с возможностью доведения линейного давления (Pligne) от номинального значения (Plignom), применяемого до начала переключения передачи, до минимального значения (Pligmin), достигнутого во время фазы заполнения (t2-t8) аккумулятора давления (23), и с возможностью последующего постепенного повторного увеличения линейного давления до момента, пока оно опять не достигнет номинального значения (Plignom) до завершения заполнения (t2-t8) аккумулятора давления (23).
2. Гидравлическая система по п.1, в которой блок управления (13) выполнен так, чтобы во время переключения передачи произвести опорожнение (t2-t9) второго исполнительного механизма (E1) для выключения второго исполнительного механизма (E1) и чтобы подать команду на понижение линейного давления (Pligne) от номинального значения (Plignom) до минимального значения (Pligmin) таким образом, чтобы начало (t3) падения давления происходило не раньше и предпочтительно после начала (t2) опорожнения второго исполнительного механизма (E1).
3. Гидравлическая система по п.1, в которой блок управления (13) выполнен с возможностью подачи команды на понижение линейного давления (Pligne) от номинального значения (Plignom) до минимального значения (Pligmin) так, чтобы минимальное значение (Pligmin) давления было достигнуто (13) не позже, чем первый исполнительный механизм (E2) начнет передавать крутящий момент (А).
4. Гидравлическая система по п.1, в которой электронный блок управления (13) выполнен с возможностью задавать профиль повторного повышения (t3-t6) линейного давления (Pligne) к его номинальному значению (Plignom) в зависимости от переменных величин, включающих в себя, в частности, скорость вращения турбины преобразователя крутящего момента, крутящий момент, выдаваемый турбиной, и температуру масла гидравлической системы.
5. Гидравлическая система по п.1, содержащая модулирующий электроклапан (3), выполненный с возможностью обеспечения падения линейного давления (Pligne) во время переключения передачи.
6. Гидравлическая система по п.1, дополнительно содержащая четвертый последовательный клапан (17), который может быть установлен между вторым исполнительным механизмом (E1) и резервуаром (16) и который может занимать первое положение, обеспечивающее первую скорость опорожнения исполнительного механизма через первое отверстие, и второе положение, обеспечивающее вторую скорость опорожнения исполнительного механизма, более низкую, чем первая, через второе отверстие с меньшим сечением.
7. Способ управления гидравлической системой по п.1, в котором по меньшей мере один первый (Е2) и один второй (E1) гидравлические исполнительные механизмы питают давлением от линейного давления (Pligne) из гидравлического контура (2) при помощи, по меньшей мере, одного последовательного клапана (22, 21) соответственно, при этом во время подъема давления первого исполнительного механизма (Е2) в момент переключения передач обеспечивают временное понижение (t3-t6) линейного давления (Pligne).
8. Способ по п.7, в котором открывают последовательный клапан (22), выполненный с возможностью подачи питания одновременно на первый исполнительный механизм (E2) и на аккумулятор давления (23), затем запускают (t2-t8) заполнение аккумулятора давления (23) и начинают опорожнение (t2-t9) второго исполнительного механизма (E1), затем понижают линейное давление (Pligne), после чего до завершения заполнения (t2-t8) аккумулятора давления (23) доводят линейное давление по существу до его первоначального значения (Plignom).
| US 5133230 A, 28.07.1992 | |||
| US 5899831 A, 04.05.1999 | |||
| ХИМИЧЕСКИЙ ПОГЛОТИТЕЛЬ ДВУОКИСИ УГЛЕРОДА | 1981 |
|
SU1840416A1 |
| Эккер | 1929 |
|
SU14822A1 |
| US4274308 А, 23.06.1981 | |||
| Прибор для очистки дымогарных и жаровых труб | 1928 |
|
SU12510A1 |

