Изобретение относится к радиотехнике и может быть использовано для определения дальности от фазового центра антенны (ФЦА) передающего радиосигналы (р/с) объекта до ФЦА принимающего р/с объекта. Передающий р/с объект содержит устройство, передающее р/с с заданными индивидуальными признаками. Принимающий р/с объект содержит устройство, принимающее и идентифицирующее р/с и информационно-измерительную подсистему измерения дальности между ФЦА упомянутых объектов. Реализация системы позволит, в том числе, обеспечить точность и однозначность определения указанной дальности.
Известные системы измерения дальности основаны на использовании амплитудных, временных, импульсных, частотных, фазовых и импульсно-фазовых методов измерения параметров р/с (Патенты РФ 2022297, 2096800, 2192022, 2213979, 2232402, 2258242, 2264598, 2309420, 2325666, 2363117, 2371737, 2378660, 2430385, 2439617, 2506605, 2507529, 2510518, 2539968, 2542579, 2558640, 2559813, 2567114, 2568104, 2572589, 2584976, 2587471, 2597007, 2598000, 2599984, 2602506, 2620359, 2638572, 2640032, 2653506, 2657237; Патенты США №№9423502 В2, 9465099 В2, 9485629 В2, 9488735 В2, 9661604 В1, 9681267 В2, 2016/0327630 А1. 2016/0330584 А1, 2016/0337933 А1, Пат. FR 2504275; Основы испытаний летательных аппаратов / Е.И. Кринецкий и др. Под ред. Е.И. Кринецкого. - М.: Машиностр., 1979, с. 64-89; Радиотехнические системы / Ю.М. Казаринов и др. Под ред. Ю.М. Казаринова. - М.: ИЦ «Академия», 2008, с. 7, 17-18, пп. 7.1-7.4, гл. 10.; Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.; «Радиотехника», 2008, гл. 5; Кинкулькин И.Е. и др. Фазовый метод определения координат. - М.: Сов. радио, 1979, с. 10-11, 97-100).
Известные системы имеют те или иные недостатки, например, большую мощность передатчика, сложность обнаружения движущихся объектов на фоне отражений от неподвижных объектов в импульсном методе, необходимость иметь несколько антенн, высокие требования к линейности ПЧМ сигнала в частотном методе, неоднозначность определения из-за повторения фазы через период в фазовом методе, необходимость наличия единой системы времени принимающей р/с системы и объекта, недостаточное быстродействие и точность и др.
По критерию минимальной достаточности наиболее близким является радиотехническая система по патенту RU №2530236.
Преимуществом заявляемой системы определения дальности от фазового центра антенны (ФЦА) передающего р/с объекта до ФЦА принимающего р/с объекта по сравнению с известными является обеспечение однозначного определения дальности с небольшим количеством измеряемых параметров без привлечения дополнительной информации о местоположении объектов и отсутствие требования обеспечения наличия единой системы времени на объектах. Это достигается тем, что передающий р/с объект содержит устройство, передающее р/с с заданными индивидуальными признаками. Принимающий р/с объект содержит устройство, принимающее и идентифицирующее р/с, соединенное с антенным устройством, и модуль, подсоединенный к антенному устройству, выполненный как с возможностью фиксации положения антенны его антенного устройства и, соответственно, фиксации положения ее фазового центра, так и с возможностью перемещения антенны принимающего радиосигналы объекта таким образом, что ее фазовый центр перемещается вдоль заданной круговой траектории с заданной угловой скоростью. Также принимающий р/с объект содержит измерительно-информационную подсистему (ИИП), функционально связанную с принимающим р/с устройством и модулем, выполненную с возможностью измерения при фиксированном положении ФЦА частотного отклонения спектра принимаемого р/с от заданного положения спектра и измерения при перемещении ФЦА проекции скорости его перемещения на прямую, соединяющую ФЦА указанных объектов, соответствующего ей ускорения и производной этого ускорения по времени и определения по ним и указанной угловой скорости дальности. Также передающий р/с объект содержит информационную подсистему, функционально связанную с передающим р/с устройством, выполненную с возможностью приема информации, передаваемой указанной ИИП, об указанном частотном отклонении спектра и ее использования для обеспечения частотной подстройки передаваемых р/с.
Для достижения указанного технического результата в соответствии с настоящим изобретением система измерения дальности d(t), изменяющейся во времени, где t - текущее время, включает передающий радиосигналы объект, содержащий передающее радиосигналы устройство, выполненное с возможностью передачи радиосигналов с заданными индивидуальными признаками, и соединенное с ним антенное устройство, кроме того, включает принимающий радиосигналы объект, содержащий антенное устройство, с подсоединенным к нему принимающим радиосигналы устройством, выполненным с возможностью приема радиосигналов передающего объекта и их идентификации, при этом принимающий радиосигналы объект содержит подсоединенный к его антенному устройству модуль, выполненный как с возможностью фиксации положения антенны его антенного устройства и, соответственно, фиксации положения ее фазового центра, так и с возможностью перемещения антенны принимающего радиосигналы объекта таким образом, что ее фазовый центр перемещается вдоль заданной круговой траектории с заданной угловой скоростью ω из упомянутого фиксированного положения на этой траектории в течение заданного промежутка времени Δt, также принимающий радиосигналы объект содержит измерительно-информационную подсистему, функционально связанную с принимающим радиосигналы устройством и указанным модулем, выполненную с возможностью измерения при фиксированном положении фазового центра его антенны частотного отклонения спектра принимаемого радиосигнала от заданного положения спектра, а при указанном перемещении фазового центра его антенны - с возможностью измерения проекции скорости перемещения указанного фазового центра его антенны ν(t) на прямую, соединяющую фазовые центры антенн указанных объектов, соответствующего ей ускорения a(t) и производную этого ускорения b(t) по времени и с возможностью определения по указанным проекциям скорости ν(t), ускорения a(t), производной этого ускорения b(t) по времени и указанной угловой скорости изменяющейся во времени дальности d(t) от фазового центра антенны антенного устройства передающего радиосигналы объекта до фазового центра антенны антенного устройства принимающего радиосигналы объекта в соответствии с уравнением измерения

кроме того, измерительно-информационная подсистема выполнена с возможностью отображения и передачи полученной информации потребителям, а передающий радиосигналы объект содержит информационную подсистему, функционально связанную с передающим радиосигналы устройством, выполненную с возможностью приема информации, в том числе, передаваемой измерительно-информационной подсистемой принимающего радиосигналы объекта, ее отображения и использования измеренного частотного отклонении спектра принимаемого радиосигнала от заданного положения спектра для обеспечения частотной подстройки передаваемых радиосигналов.
Также передающее радиосигналы устройство выполнено с возможностью формирования и передачи радиосигналов, содержащих, в том числе, по крайней мере, одну гармоническую составляющую.
Кроме того, модуль, подсоединенный к антенному устройству принимающего радиосигналы объекта, выполнен с возможностью осуществления перемещения антенны принимающего радиосигналы объекта из заданного положения в другое заданное положение на указанной круговой траектории, в том числе, и через заданное число полных циклов оборотов, а также и с изменением направления перемещения.
Также указанная измерительно-информационная подсистема выполнена с возможностью измерения указанных d(t) на заданных участках указанной круговой траектории.
Совокупность всех признаков позволяет определить дальность от фазового центра антенны (ФЦА) передающего р/с объекта до ФЦА принимающего р/с объекта с достижением упомянутого технического результата.
В существующем уровне техники не выявлено источников информации, которые содержали бы сведения о системах того же назначения с указанной совокупностью признаков. Ниже изобретение описано более детально со ссылками на фигуру.
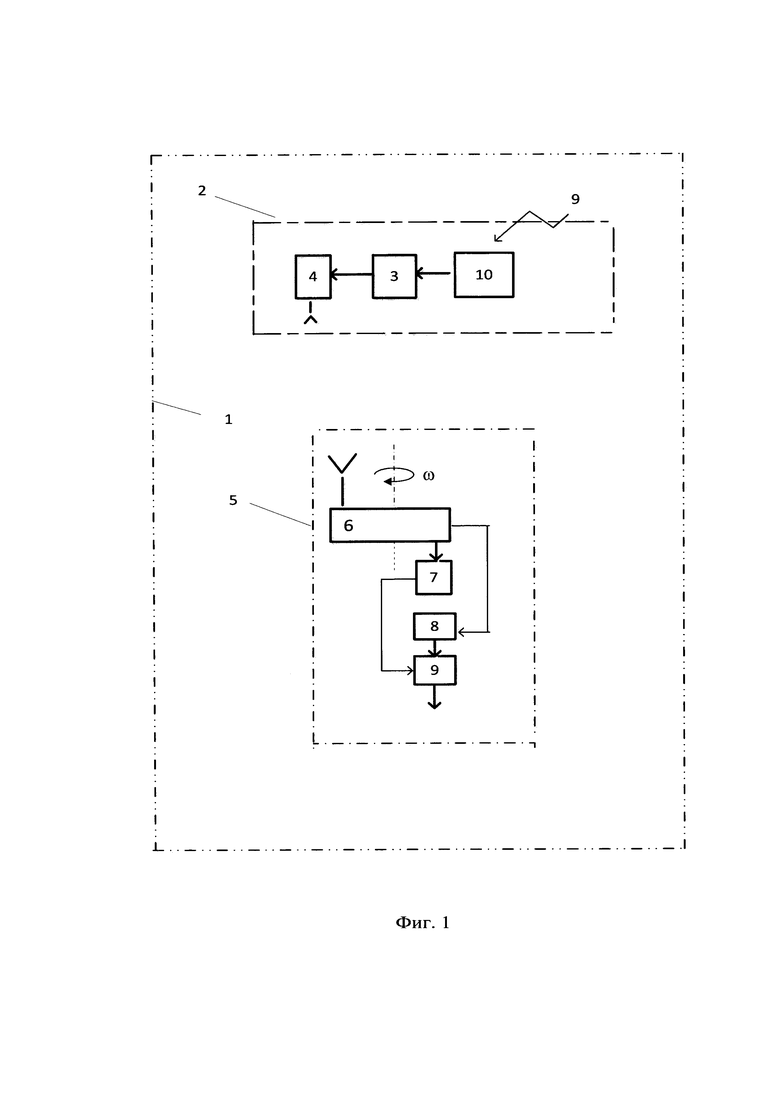
На фигуре 1 показана заявляемая система. Система измерения дальности 1 включает передающий р/с объект 2, содержащий передающее р/с устройство 3, выполненное с возможностью передачи р/с с заданными индивидуальными признаками. С устройством 3 соединено антенное устройство 4. Система 1 включает также принимающий р/с объект 5, содержащий антенное устройство 6 с подсоединенным к нему принимающим р/с устройством 7, выполненным с возможностью приема р/с передающего объекта 2 и их идентификации.
Принимающий р/с объект 5 содержит подсоединенный к его антенному устройству 6 модуль 8, выполненный как с возможностью фиксации положения антенны его антенного устройства 6 и, соответственно, фиксации положения ее фазового центра, так и с возможностью перемещения антенны принимающего радиосигналы объекта 5 таким образом, что ее фазовый центр перемещается вдоль заданной круговой траектории с заданной угловой скоростью ω из упомянутого фиксированного положения на этой траектории в течение заданного промежутка времени Δt. Также принимающий р/с объект 5 содержит измерительно-информационную подсистему (ИИП) 9, функционально связанную с принимающим р/с устройством 7 и модулем 8. ИИП 9 выполнена с возможностью измерения при фиксированном положении ФЦА антенного устройства 6 частотного отклонения спектра принимаемого р/с от заданного положения спектра. ИИП 9 выполнена с возможностью измерения при перемещении фазового центра указанной антенны проекции скорости его перемещения ν(t) на прямую, соединяющую фазовые центры антенн объектов 2 и 5 и соответствующего ей ускорения a(t) и производной этого ускорения b(t) по времени. Также ИИП 9 выполнена с возможностью определения по указанным проекциям скорости ν(t), ускорения a(t), производной этого ускорения b(t) по времени и указанной угловой скорости ω изменяющейся во времени дальности от фазового центра антенны антенного устройства 4 передающего р/с объекта 2 до фазового центра антенны антенного устройства 6 принимающего р/с объекта 5 в соответствии с уравнением измерения. Кроме того, ИИП 9 выполнена с возможностью отображения и передачи полученной информации потребителям. Передающий р/с объект 2 содержит информационную подсистему 10, функционально связанную с передающим радиосигналы устройством 3, выполненную с возможностью приема информации, в том числе, передаваемой ИИП 9 принимающего р/с объекта 5, ее отображения и использования измеренного частотного отклонении спектра принимаемого радиосигнала от заданного положения спектра для обеспечения частотной подстройки передаваемых радиосигналов,
Передающее р/с устройство 3 может быть выполнено с возможностью формирования и передачи р/с, содержащих, в том числе, по крайней мере, одну гармоническую составляющую.
Модуль 8 может быть выполнен с возможностью осуществления перемещения антенны принимающего радиосигналы объекта из заданного положения в другое заданное положение на указанной круговой траектории, в том числе, и через заданное число полных циклов оборотов, а также и с изменением направления перемещения. Также измерительно-информационная подсистема выполнена с возможностью измерения указанных d(t) на заданных участках указанной круговой траектории, на которых отсутствуют сингулярности в уравнении измерения.
Антенна установлена на заданном расстоянии от оси вращения приемного антенного устройства 6, снабженного сервоприводом с программируемым логическим контроллером, противовесами для балансировки, датчиком кругового перемещения, токосъемником и другими необходимыми элементами. Подобные устройства, в которых оси устройств совпадают с осями их вращения, широко используются в технике, например, в радарах (habr.com Справочник по антеннам для радаров; yandex.ru Вращающиеся антенны локаторов. Обращения 12.03.2020). В предлагаемой системе ось антенны смещена относительно оси вращения приемного антенного устройства, что обеспечивает круговую траекторию перемещения антенны и ФЦА. Тем не менее, часть элементов, необходимых для обеспечения работы, например, локаторов, может быть использована и при реализации данной системы.
Предложенная система измерения дальности работает следующим образом. С передающего р/с объекта 2 передают р/с, на принимающем р/с объекте 5 их идентифицируют. При приеме фиксируют положение ФЦА принимающего р/с объекта 5 и измеряют частотное отклонение спектра принимаемого р/с от заданного положения спектра. Кроме того, перемещают антенну принимающего р/с объекта 5 таким образом, что ее фазовый центр перемещается вдоль заданной круговой траектории с заданной угловой скоростью ω. Измеряют проекцию скорости перемещения ФЦА принимающего р/с объекта 5 ν(t) на прямую, соединяющую ФЦА объектов 2 и 5. Также измеряют соответствующее этой скорости ускорение a(t) и производную этого ускорения b(t) по времени. По измеренным проекциям ν(t), a(t), b(t) и угловой скорости ω определяют дальность, изменяющуюся во времени, в соответствии с приведенным уравнением измерения. Полученную таким образом информацию отображают и передают потребителям. Так, информацию об измеренном частотном отклонении спектра принимаемого радиосигнала от заданного положения спектра передают на передающий р/с объект 2 с целью получения заданного положения спектра передаваемых им радиосигналов (частотная подстройка).
Измерение скорости основано, например, на измерении смещения частоты сигнала, связанного с эффектом Доплера.
Указанная дальность определяется однозначно без привлечения дополнительной априорной информации о местоположении объектов.
Перечислим основные достоинства заявляемой системы:
- обеспечивает однозначное определение дальности от ФЦА передающего р/с объекта до ФЦА принимающего р/с объекта с высокой точностью;
- практически исключается влияние на точность определения дальности наличие отраженных (например, от земли) сигналов;
-не требуется единая система времени на объектах;
- реализация проще и дешевле, чем известных аналогов;
- позволяет осуществить частотную подстройку передаваемых р/с по эталонному генератору принимающего р/с объекта;
- не предъявляет высокие требования к вычислительной системе по быстродействию и объему памяти.
Результативность и эффективность использования заявляемой системы состоит в том, что она может быть применена на практике для развития и совершенствования навигационных систем. Система может быть применена, в том числе, например, при использовании принимающего р/с объекта в качестве контрольного для выработки соответствующей информации о дальностях от ФЦА передающих р/с объектов до ФЦА принимающего р/с объекта в конкретный момент времени с известным положением ФЦА принимающего р/с объекта в этот момент времени и передачи ее на передающие р/с объекты.
Таким образом, заявляемая система обеспечивает появление новых свойств, не достигаемых в аналогах. Проведенный анализ позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленной системы условию «новизны».
Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень». Таким образом, заявленное изобретение соответствует критериям «новизна» и «изобретательский уровень», а также критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2020 |
|
RU2738641C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 2020 |
|
RU2725618C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2020 |
|
RU2732192C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2020 |
|
RU2732893C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОТЕХНИЧЕСКОГО ОБЪЕКТА | 2020 |
|
RU2737532C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОТЕХНИЧЕСКОГО ОБЪЕКТА | 2020 |
|
RU2737533C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2020 |
|
RU2726141C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2018 |
|
RU2687057C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО ДАЛЬНОСТЯМ | 2019 |
|
RU2695805C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО ДАЛЬНОСТЯМ | 2019 |
|
RU2695807C1 |
Изобретение относится к радиотехнике и может быть использовано для определения дальности от фазового центра антенны (ФЦА) передающего радиосигналы (р/с) объекта до ФЦА принимающего р/с объекта. Технический результат заключается в обеспечении однозначности определения дальности. Передающий р/с объект содержит устройство, передающее р/с с заданными индивидуальными признаками. Принимающий р/с объект содержит устройство, принимающее и идентифицирующее р/с, соединенное с антенным устройством, и модуль, подсоединенный к антенному устройству, выполненный как с возможностью фиксации положения антенны его антенного устройства и, соответственно, фиксации положения ее фазового центра, так и с возможностью перемещения антенны принимающего радиосигналы объекта таким образом, что ее фазовый центр перемещается вдоль заданной круговой траектории с заданной угловой скоростью. Также принимающий р/с объект содержит измерительно-информационную подсистему (ИИП), функционально связанную с принимающим р/с устройством и модулем, выполненную с возможностью измерения при фиксированном положении ФЦА частотного отклонения спектра принимаемого р/с от заданного положения спектра и измерения при перемещении ФЦА проекции скорости его перемещения на прямую, соединяющую ФЦА указанных объектов, соответствующего ей ускорения и производной этого ускорения по времени и определения по ним и указанной угловой скорости указанной дальности. Также передающий р/с объект содержит информационную подсистему, функционально связанную с передающим р/с устройством, выполненную с возможностью приема информации, передаваемой указанной ИИП, об указанном частотном отклонении спектра и ее использования для обеспечения частотной подстройки передаваемых р/с. 3 з.п. ф-лы, 1 ил.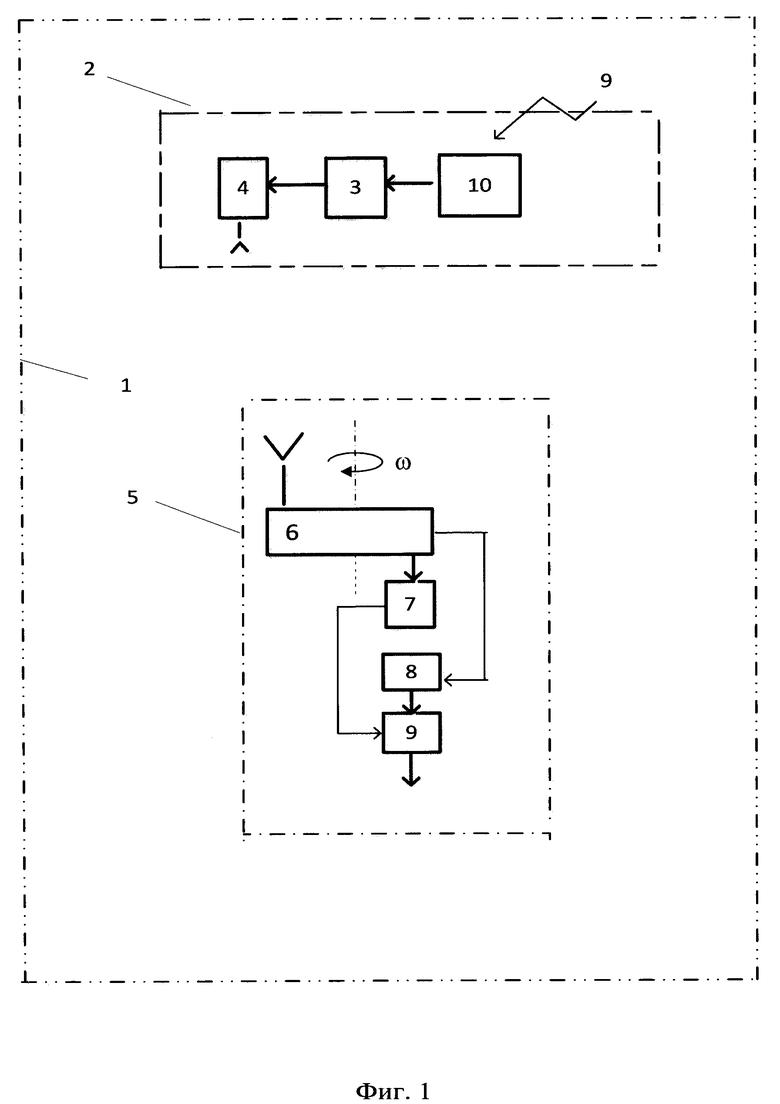
1. Система измерения дальности d(t), изменяющейся во времени, где t - текущее время, включающая передающий радиосигналы объект, содержащий передающее радиосигналы устройство, выполненное с возможностью передачи радиосигналов с заданными индивидуальными признаками и соединенное с ним антенное устройство, кроме того, включающая принимающий радиосигналы объект, содержащий антенное устройство, с подсоединенным к нему принимающим радиосигналы устройством, выполненным с возможностью приема радиосигналов передающего объекта и их идентификации, при этом принимающий радиосигналы объект содержит подсоединенный к его антенному устройству модуль, выполненный как с возможностью фиксации положения антенны его антенного устройства и, соответственно, фиксации положения ее фазового центра, так и с возможностью перемещения антенны принимающего радиосигналы объекта таким образом, что ее фазовый центр перемещается вдоль заданной круговой траектории с заданной угловой скоростью ω из упомянутого фиксированного положения на этой траектории в течение заданного промежутка времени Δt, также принимающий радиосигналы объект содержит измерительно-информационную подсистему, функционально связанную с принимающим радиосигналы устройством и указанным модулем, выполненную с возможностью измерения при фиксированном положении фазового центра его антенны частотного отклонения спектра принимаемого радиосигнала от заданного положения спектра, а при указанном перемещении фазового центра его антенны - с возможностью измерения проекции скорости перемещения указанного фазового центра его антенны ν(t) на прямую, соединяющую фазовые центры антенн указанных объектов, соответствующего ей ускорения a(t) и производной этого ускорения b(t) по времени и с возможностью определения по указанным проекциям скорости ν(t), ускорения a(t), производной этого ускорения b(t) по времени и указанной угловой скорости ω изменяющейся во времени дальности d(t) от фазового центра антенны антенного устройства передающего радиосигналы объекта до фазового центра антенны антенного устройства принимающего радиосигналы объекта в соответствии с уравнением измерения

кроме того, измерительно-информационная подсистема выполнена с возможностью отображения и передачи полученной информации потребителям, а передающий радиосигналы объект содержит информационную подсистему, функционально связанную с передающим радиосигналы устройством, выполненную с возможностью приема информации, в том числе, передаваемой измерительно-информационной подсистемой принимающего радиосигналы объекта, ее отображения и использования измеренного частотного отклонении спектра принимаемого радиосигнала от заданного положения спектра для обеспечения частотной подстройки передаваемых радиосигналов.
2. Система измерения дальности по п. 1, отличающаяся тем, что передающее радиосигналы устройство выполнено с возможностью формирования и передачи радиосигналов, содержащих, в том числе, по крайней мере, одну гармоническую составляющую.
3. Система измерения дальности по п. 1, или 2, отличающаяся тем, что модуль, подсоединенный к антенному устройству принимающего радиосигналы объекта, выполнен с возможностью осуществления перемещения антенны принимающего радиосигналы объекта из заданного положения в другое заданное положение на указанной круговой траектории, в том числе, и через заданное число полных циклов оборотов, а также и с изменением направления перемещения.
4. Система измерения дальности по п.1, или 2, или 3, отличающаяся тем, что указанная измерительно-информационная подсистема выполнена с возможностью измерения указанных d(t) на заданных участках указанной круговой траектории.
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2530233C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2018 |
|
RU2687059C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2339966C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2594759C1 |
| СПОСОБ АВТОНОМНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ПОЛЬЗОВАТЕЛЯМИ-АБОНЕНТАМИ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, УГЛОВОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ПЕЛЕНГА ПО ФАЗЕ НЕСУЩЕЙ РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ, РЕТРАНСЛИРУЕМЫХ СПУТНИКАМИ | 2004 |
|
RU2286584C2 |
| Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании и инверсном синтезе апертуры с итерационным уточнением расстояния от эквивалентного фазового центра антенны до точки синтезирования | 2016 |
|
RU2628997C1 |
| US 2006066486 A1, 30.03.2006 | |||
| US 10371783 B2, 06.08.2019 | |||
| WO 2013176575 A1, 28.11.2013 | |||
| US 6967615 B1, 22.11.2005 | |||
| US 5361073 A, 01.11.1994 | |||
| GB 2059214 A, 15.04.1981. | |||

