Область техники, к которой относится изобретение
Настоящее изобретение относится к общей области способов содействия управлению автотранспортными средствами.
В частности, оно касается способа, в ходе которого к органу рулевого управления автотранспортного средства автоматически прикладывается поправочный крутящий момент.
Уровень техники
В настоящее время многие автотранспортные средства оснащены системой содействия управлению транспортным средством, позволяющей при помощи электрического двигателя создавать дополнительный крутящий момент на рулевой колонке транспортного средства, чтобы помогать водителю этого транспортного средства поворачивать рулевое колесо этого транспортного средства.
Как известно, автотранспортное средство оборудуют также системой содействия движению, содержащей переднюю камеру или другой датчик, такой как радар, позволяющие определять положение этого транспортного средства на занимаемой им полосе движения.
Если обнаруживают отклонение транспортного средства относительно центра этой полосы движения или если обнаруживают, что это транспортное средство начинает сходить с этой полосы движения, на рулевую колонку можно воздействовать поправочным крутящим моментом, чтобы скорректировать траекторию транспортного средства и привести его по существу к центру этой полосы движения. Этот поправочный крутящий момент добавляется к крутящему моменту, прикладываемому к рулевому колесу водителем транспортного средства.
Такая система содействия движению позволяет ограничивать сходы транспортного средства с дороги и/или позволяет удерживать транспортное средство по существу по центру занимаемой им полосы движения без участия водителя или лишь с его ограниченным участием.
В частности, из документа ЕР 2 591 983 известна система содействия удержанию транспортного средства на его полосе движения, позволяющая создавать поправочный крутящий момент на рулевой колонке этого транспортного средства в дополнение к крутящему моменту, прикладываемому водителем к рулевому колесу этого транспортного средства, чтобы помогать водителю удерживать транспортное средство на его полосе движения. Значение этого поправочного крутящего момента модулируют с учетом прикладываемого крутящего момента, которым водитель транспортного средства действует на рулевое колесо этого транспортного средства, и с учетом того, что автотранспортное средство движется по прямой линии или, наоборот, входит в крутой вираж. В частности, значение этого поправочного крутящего момента уменьшают, когда транспортное средство входит в вираж, чтобы позволить водителю отклониться от занимаемой полосы движения для наиболее короткого прохождения этого виража.
Однако, когда эта система начинает действовать, этот поправочный крутящий момент может добавиться внезапно, имея повышенное значение, к крутящему моменту, прикладываемому водителем к рулевому колесу транспортного средства, что создает неудобство для водителя и может помешать ему при вождении транспортного средства.
Сущность изобретения
Чтобы преодолеть вышеупомянутый недостаток известного технического решения, настоящим изобретением предложен новый способ содействия управлению автотранспортным средством, занимающим полосу движения, содержащий следующие этапы:
а) считывают по меньшей мере один элемент данных, относящийся к положению автотранспортного средства относительно полосы движения,
b) проверяют, имеется ли неожиданный сход или начало схода автотранспортного средства с указанной полосы движения,
с) если обнаруживают этот неожиданный сход, включают фазу вмешательства, во время которой к указанному органу рулевого управления прикладывают поправочный крутящий момент, чтобы автотранспортное средство следовало по целевой траектории,
при этом вычисление указанного поправочного крутящего момента включает в себя следующие операции:
i) считывают действительный угол поворота указанного органа рулевого управления транспортного средства,
ii) в зависимости от элемента данных, считанного на этапе а), определяют целевой угол поворота, в пределах которого необходимо расположить указанный орган рулевого управления, чтобы автотранспортное средство следовало по целевой траектории,
iii) определяют фильтрованный целевой угол поворота таким образом, чтобы:
- в первоначальный момент времени указанной фазы вмешательства фильтрованный целевой угол поворота был равен действительному углу поворота в этот первоначальный момент, и чтобы
- после этого первоначального момента времени фильтрованный целевой угол поворота стремился к указанному целевому углу поворота, имея при этом скорость изменения, абсолютное значение которой остается ниже первого определенного порога, и
iv) в зависимости от этого фильтрованного целевого угла поворота определяют предназначенный для приложения указанный поправочный крутящий момент.
Неожиданный сход автотранспортного средства с занимаемой им полосы движения может соответствовать, в частности, непреднамеренному сходу с этой полосы движения, например, по причине невнимательности или сонного состояния этого водителя.
Вышеупомянутый орган рулевого управления соответствует, например, рулевой колонке автотранспортного средства или зубчатой рейке рулевого управления этого транспортного средства.
Вышеупомянутый угол поворота может соответствовать угловому положению рулевого колеса транспортного средства, положению зубчатой рейки рулевого управления этого транспортного средства или углу, характеризующему ориентацию колес транспортного средства.
Поправочный крутящий момент накладывается на крутящий момент, которым действует водитель транспортного средства при помощи рулевого колеса этого транспортного средства.
Благодаря фильтрации, осуществляемой во время операции iii), когда начинается указанная фаза вмешательства, абсолютное значение поправочного крутящего момента, прикладываемого к органу рулевого управления транспортного средства, увеличивается постепенно без рывков, что обеспечивает комфорт для водителя и не является неожиданным для него или не может помешать ему при вождении транспортного средства.
Кроме того, это осуществляемое постепенно содействие управлению автотранспортным средством позволяет также стимулировать водителя (но не неожиданным для него образом) и указать ему, что вождение потребовало вмешательства, и может, например, заставить водителя быть более бдительным.
Заявленный способ содействия управлению имеет также следующие не ограничительные и предпочтительные признаки:
- указанный неожиданный сход обнаруживают в зависимости от элемента данных, считанного на этапе а);
- указанный неожиданный сход обнаруживают в зависимости от действительного угла поворота;
- указанный неожиданный сход обнаруживают в зависимости от активного или неактивного состояния мигающих указателей поворота автотранспортного средства;
- во время операции iii) фильтрованный целевой угол поворота определяют таким образом, чтобы, как только разность между фильтрованным целевым углом поворота и целевым углом поворота аннулируется или меняет знак, фильтрованный целевой угол поворота стремился к указанному целевому углу поворота, имея при этом скорость изменения, абсолютное значение которой остается ниже второго определенного порога, который превышает указанный первый порог;
- поправочный крутящий момент, прикладываемый к указанному органу рулевого управления транспортного средства, определяют также в зависимости от крутящего момента, прикладываемого водителем транспортного средства к этому органу рулевого управления;
- в ходе указанной фазы вмешательства предусмотрено прекращение содействия управлению посредством аннулирования поправочного крутящего момента, когда крутящий момент, прикладываемый водителем транспортного средства к указанному органу рулевого управления превышает заданный определенный порог;
- когда содействие управлению прекращено, но обнаруживают неожиданный сход автотранспортного средства с занимаемой им полосы движения (в отсутствие явного действия водителя автотранспортного средства на орган рулевого управления этого транспортного средства), предусмотрено возобновление содействия управлению посредством возобновления приложения указанного поправочного крутящего момента к указанному органу рулевого управления транспортного средства; и
- возобновление усиления осуществляют также в зависимости от крутящего момента, прикладываемого водителем автотранспортного средства к указанному органу рулевого управления.
Предпочтительно, во время операции iii) фильтрацию целевого угла поворота осуществляют таким образом, чтобы:
- в первоначальный момент указанного возобновления содействия управлению фильтрованный целевой угол поворота был равен действительному углу поворота в этот первоначальный момент, и чтобы
- после этого первоначального момента фильтрованный целевой угол поворота стремился к указанному углу поворота, имея при этом скорость изменения, абсолютное значение которой остается ниже третьего заданного определенного порога, причем этот третий порог ниже, например, указанного второго порога.
Во время операции iii) фильтрованный целевой угол поворота можно также определять таким образом, чтобы его абсолютное значение оставалось ниже определенного порога безопасности.
Подробное описание примера осуществления
Изобретение и его осуществление будут более понятны из нижеследующего описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи.
На этих прилагаемых чертежах:
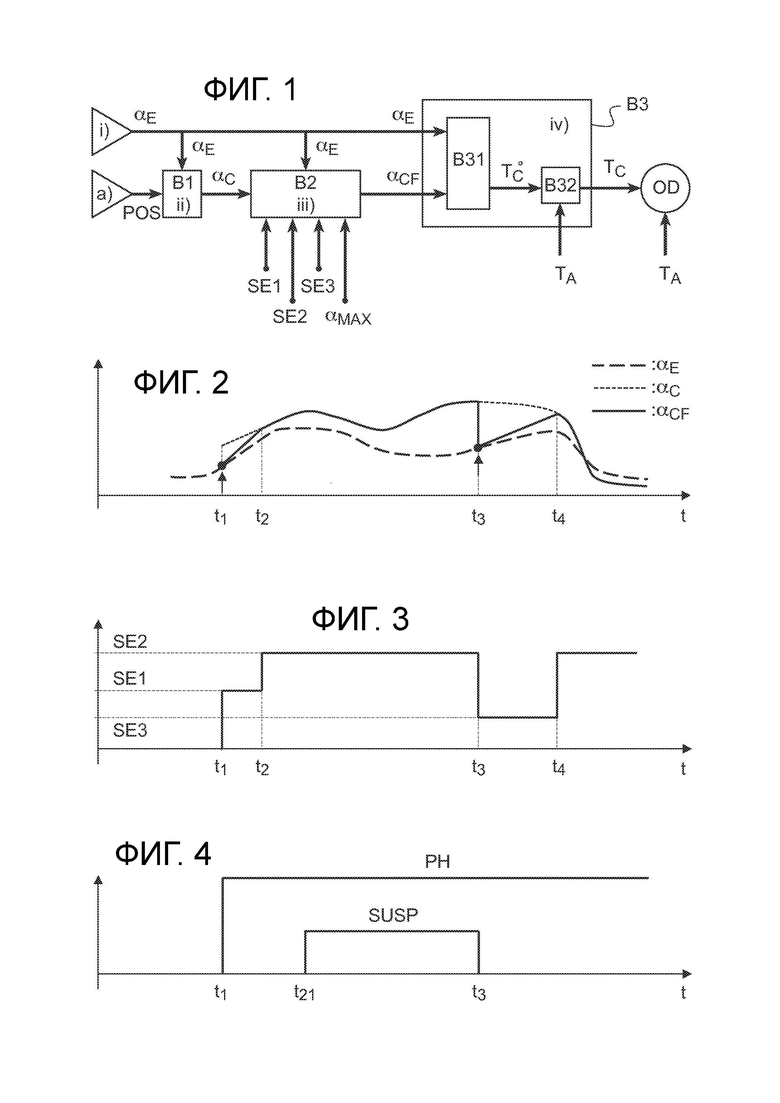
Фиг. 1 - блок-схема операций, осуществляемых в ходе способа содействия управлению автотранспортным средством в соответствии с изобретением для вычисления поправочного крутящего момента, прикладываемого к органу рулевого управления этого транспортного средства.
Фиг. 2 - изменение во времени различных величин, которые могут быть считаны или определены в ходе способа, содержащего операции, показанные на фиг. 1, для примерного пути этого автотранспортного средства.
Фиг. 3 - временные интервалы для этого пути автотранспортного средства, в течение которых применяют соответственно первый, второй и третий заранее определенные пороги для ограничения скорости изменения фильтрованного целевого угла поворота.
Фиг. 4 - фаза вмешательства для этого пути автотранспортного средства, в ходе которой к органу рулевого управления автотранспортного средства прикладывают этот поправочный крутящий момент, а также временной интервал, в течение которого прекращают содействие управлению этим транспортным средством посредством аннулирования этого поправочного крутящего момента.
Описанный ниже пример заявленного способа содействия управлению автотранспортным средством осуществляют в автотранспортном средстве, содержащем, в частности, датчик, позволяющий определять действительный угол αЕ поворота органа OD рулевого управления этого транспортного средства (фиг. 1).
В данном случае этот орган OD рулевого управления соответствует рулевой колонке автотранспортного средства, на которой закреплено рулевое колесо этого транспортного средства.
Действительный угол αЕ поворота соответствует при этом угловому положению этого рулевого колеса или, соответственно, угловому положению этой рулевой колонки.
В варианте орган рулевого управления автотранспортного средства может соответствовать, например, зубчатой рейке рулевого управления этого транспортного средства. В этом случае вышеупомянутый угол поворота соответствует положению этой зубчатой рейки рулевого управления.
В варианте этот угол поворота может характеризовать ориентацию колес транспортного средства, в данном случае ориентацию передних колес этого транспортного средства.
Автотранспортное средство содержит также датчик крутящего момента, позволяющий считывать крутящий момент ТА, прикладываемый водителем автотранспортного средства к этому органу OD рулевого управления, в данном случае крутящий момент, прикладываемый водителем к рулевой колонке при помощи рулевого колеса транспортного средства.
Кроме того, автотранспортное средство содержит привод, такой как электрический двигатель, выполненный с возможностью приложения поправочного крутящего момента TC к органу OD рулевого управления этого транспортного средства.
Этот поправочный крутящий момент TC добавляется к прикладываемому крутящему моменту ТА, которым водитель действует на орган OD рулевого управления автотранспортного средства (фиг. 1).
Автотранспортное средство содержит также датчик, выполненный с возможностью считывать по меньшей мере один элемент данных, относящийся к положению POS этого автотранспортного средства относительно занимаемой им полосы движения.
В данном случае этот датчик содержит видеокамеру, поле обзора которой охватывает участок этой полосы движения, находящийся перед автотранспортным средством. Указанный элемент данных, относящийся к положению POS этого автотранспортного средства, включает в себя в этом случае изображение этого участка полосы движения, занимаемой автотранспортным средством.
В данном случае положение POS автотранспортного средства относительно занимаемой им полосы движения соответствует отклонению между автотранспортным средством и центром этой полосы движения.
В варианте, вместо видеокамеры датчик может содержать, например, радар или лидар (транслитерация англо-саксонского сокращения от “Light Detection And Ranging”), позволяющий обнаруживать объекты по краям этой полосы движения, такие как ограждающий барьер, парапет или линия дорожной разметки. В этом случае указанный элемент данных, относящийся к положению этого автотранспортного средства, определяют на основании отраженного сигнала, получаемого этим датчиком.
Это автотранспортное средство содержит также электронный модуль анализа, выполненный с возможностью определения этого положения POS автотранспортного средства относительно занимаемой им полосы движения на основании указанного элемента данных, относящегося к этому положению. Это определение осуществляют в данном случае посредством анализа изображения, снятого видеокамерой автотранспортного средства. В частности, в данном случае на этом изображении идентифицируют по меньшей мере одну из двух линий дорожной разметки, отмечающих один из краев этой полосы движения, и определяют геометрические характеристики этой линии разметки, такие как ее общая форма и ее положение на изображении. Затем на основании этих геометрических характеристик определяют положение автотранспортного средства относительно этой линии разметки и затем положение POS относительно центра полосы движения.
Этот электронный модуль анализа выполнен также с возможностью определения поправочного крутящего момента TC для приложения к органу OD рулевого управления автотранспортного средства, в частности, в зависимости от:
- положения POS автотранспортного средства относительно занимаемой им полосы движения,
- действительного угла αЕ поворота органа OD рулевого управления транспортного средства, и
- крутящего момента ТА, прикладываемого водителем к этому органу OD рулевого управления.
Этот электронный модуль анализа выполнен также с возможностью управлять вышеупомянутым приводом таким образом, чтобы этот привод прикладывал ранее определенный поправочный крутящий момент TC к органу OD рулевого управления автотранспортного средства.
Способ содействия управлению, осуществляемый электронным модулем анализа, в основном содержит следующие три этапа:
а) считывают по меньшей мере один элемент данных, относящийся к положению POS автотранспортного средства относительно занимаемой им полосы движения,
b) проверяют, имеется ли неожиданный сход или начало схода автотранспортного средства с указанной полосы движения, и
с) при обнаружении этого неожиданного схода включают фазу вмешательства РН, в ходе которой на указанный орган OD рулевого управления действуют поправочным крутящим моментом, чтобы автотранспортное средство следовало по целевой траектории.
В ходе этапа а) указанный элемент данных, относящийся к положению POS автотранспортного средства относительно занимаемой им полосы движения, получают при помощи видеокамеры, которой в данном случае оснащено автотранспортное средство, как было указано выше.
Во время этапа b) сход или начало схода автотранспортного средства с занимаемой им полосы движения определяют, в частности, на основании указанного положения POS автотранспортного средства.
Например, если это положение POS показывает, что отклонение между автотранспортным средством и центром этой полосы движения превышает заданное максимальное отклонение, определяют, что транспортное средство сходит с этой полосы движения. Если это положение POS показывает, что отклонение между автотранспортным средством и центром этой полосы движения увеличивается в течение времени и стремится превысить это максимальное отклонение, определяют, что транспортное средство сейчас начнет сходить с этой полосы движения.
В данном случае начало схода автотранспортного средства с занимаемой им полосы движения определяют также в зависимости от действительного угла αЕ поворота органа OD рулевого управления транспортного средства. Этот действительный угол αЕ поворота характеризует направление, в котором движется автотранспортное средство. Учет этого действительного угла αЕ поворота в комбинации с положением POS автотранспортного средства позволяет эффективно определять, что автотранспортное средство начинает сходить с этой полосы движения.
В варианте, сход или начало схода автотранспортного средства с занимаемой им полосы движения определяют также в зависимости от других величин, относящихся к движению автотранспортного средства относительно занимаемой им полосы движения, таких как его скорость перемещения относительно этой полосы движения или его скорость поворота (скорость поворота транспортного средства определяют как его скорость вращения вокруг оси, перпендикулярной к средней плоскости дороги, на которой находится транспортное средство, и ее можно измерять, например, при помощи гирометра).
Когда обнаруживают неизбежный сход или начало схода автотранспортного средства с занимаемой им полосы движения, то в данном случае определяют, что этот сход является неожиданным, если мигающие указатели поворота транспортного средства находятся в неактивном состоянии.
В частности, неожиданный сход автотранспортного средства с занимаемой им полосы движения соответствует сходу с этой полосы движения, не преднамеренному со стороны водителя автотранспортного средства, например, по причине невнимательности или сонного состояния этого водителя.
Чтобы избежать этого неожиданного схода автотранспортного средства с занимаемой им полосы движения, на этапе с) включают вышеупомянутую фазу вмешательства РН, в ходе которой на указанный орган OD рулевого управления действуют поправочным крутящим моментом ТС, чтобы автотранспортное средство следовало по целевой траектории. Эта целевая траектория является, например, траекторией, следующей по центру полосы движения, которую занимает это транспортное средство.
Основные операции, осуществляемые с целью вычисления этого поправочного крутящего момента ТС, схематично представлены на фиг. 1.
Сначала во время операции i) считывают действительный угол αЕ поворота органа OD рулевого управления автотранспортного средства.
Затем во время операции ii), показанной на фиг. 1 в виде блока В1, определяют целевой угол αС поворота, в пределах которого следует расположить орган OD рулевого управления, чтобы автотранспортное средство следовало по вышеупомянутой целевой траектории.
Этот целевой угол αС поворота определяют, в частности, в зависимости от положения POS автотранспортного средства относительно занимаемой им полосы движения (следует напомнить, что положение POS определяют при помощи элемента данных, считанного на этапе а)) и в зависимости от действительного угла αЕ поворота этого органа OD рулевого управления.
Этот целевой угол αС поворота может существенно отличаться от действительного угла αЕ поворота этого органа OD рулевого управления, в частности, в ситуации, в которой водитель транспортного средства может направить это транспортное средство по недосмотру наружу занимаемой полосы движения.
В ходе следующей операции iii), представленной на фиг. 1 в виде блока В2, определяют фильтрованный целевой угол αCF поворота, получаемый посредством фильтрации целевого угла αС поворота.
В данном случае эта фильтрация состоит в ограничении изменений угла поворота транспортного средства, чтобы избежать любого рывка.
Эту операцию iii) осуществляют таким образом, чтобы:
- в первоначальный момент t1 времени указанной фазы вмешательства РН фильтрованный целевой угол αCF поворота был равен действительному углу αЕ поворота:

затем, чтобы
- после этого первоначального момента t1 времени фильтрованный целевой угол αCF поворота стремился к указанному целевому углу αС поворота, имея при этом скорость изменения, абсолютное значение которой остается ниже первого определенного порога SE1, то есть стремился к указанному целевому углу αС поворота и отвечал при этом следующему неравенству (F2):
В частности, во время этой операции iii) фильтрованный целевой угол αCF поворота определяют таким образом, чтобы он изменялся непрерывно и без рывков, стремясь максимально быстро к целевому углу αС поворота, отвечая при этом неравенству (F2).
Таким образом, после включения этой фазы вмешательства РН фильтрованный целевой угол αCF поворота стремится к целевому углу αС поворота, имея при этом скорость изменения, абсолютное значение  которой равно первому порогу SE1, пока этот фильтрованный целевой угол αCF поворота не сравняется с целевым углом αС поворота.
которой равно первому порогу SE1, пока этот фильтрованный целевой угол αCF поворота не сравняется с целевым углом αС поворота.
В ходе операции iii) фильтрованный целевой угол αCF поворота определяют также таким образом, чтобы, как только разность между фильтрованным целевым углом αCF поворота и целевым углом αС поворота аннулируется или поменяет знак, фильтрованный целевой угол αCF поворота стремился к указанному целевому углу αС поворота, имея при этом скорость изменения, абсолютное значение которой остается меньше второго определенного порога SE2, который превышает указанный первый порог SE2, то есть стремился к указанному целевому углу αС поворота, отвечая при этом следующему неравенству (F3):
Иначе говоря, как только фильтрованный целевой угол αCF поворота сравнивается с (не фильтрованным) целевым углом αС поворота, к которому он стремится, это обеспечивает более быстрые изменения в течение времени этого фильтрованного целевого угла αCF поворота (поскольку этот второй порог SE2 превышает первый порог SE1).
В частности, после того как фильтрованный целевой угол αCF поворота сравнялся с целевым углом αС поворота, фильтрованный целевой угол αCF поворота остается равным целевому углу αС поворота, пока абсолютное значение  скорости изменения целевого угла αС поворота остается меньше второго порога SE2. Если абсолютное значение этого целевого угла αС поворота становится больше этого второго порога SE2, абсолютное значение скорости изменения фильтрованного целевого угла αCF поворота оказывается ограниченным этим вторым порогом SE2, и фильтрованный целевой угол поворота непрерывно стремится к целевому углу поворота, чтобы с ним сравняться.
скорости изменения целевого угла αС поворота остается меньше второго порога SE2. Если абсолютное значение этого целевого угла αС поворота становится больше этого второго порога SE2, абсолютное значение скорости изменения фильтрованного целевого угла αCF поворота оказывается ограниченным этим вторым порогом SE2, и фильтрованный целевой угол поворота непрерывно стремится к целевому углу поворота, чтобы с ним сравняться.
В ходе указанной фазы вмешательства РН содействие управлению транспортным средством, осуществляемое посредством приложения указанного поправочного крутящего момента ТС к органу OD рулевого управления транспортного средства, можно прекратить, аннулируя поправочный крутящий момент ТС, что будет описано ниже.
После такого прекращения содействия управлению в ходе возобновления этого содействия управлению целевой угол αС поворота фильтруют во время операции iii) таким образом, что:
- в первоначальный момент t3 указанного возобновления содействия управлению (фиг. 2-4) фильтрованный целевой угол αCF поворота равен действительному углу αЕ поворота в этот первоначальный момент t3:

затем
- после этого первоначального момента времени фильтрованный целевой угол αCF поворота стремится к этому целевому углу αС поворота, имея при этом скорость изменения, абсолютное значение которой остается меньше третьего порога SE3, то есть стремится к указанному целевому углу αС поворота, отвечая при этом следующему неравенству (F5):
Этот третий порог SE3 в данном случае меньше второго порога SE2. В частности, в данном случае этот третий порог SE3 меньше также первого порога SE1.
В частности, во время этого возобновления содействия управлению фильтрованный целевой угол αCF поворота определяют таким образом, чтобы он изменялся непрерывно, без рывков, и стремился максимально быстро к целевому углу αС поворота, отвечая при этом неравенству (F5).
Таким образом, во время этого возобновления содействия управлению фильтрованный целевой угол αCF поворота стремится к целевому углу αС поворота, имея при этом скорость изменения, абсолютное значение которой равно третьему порогу SE3, причем пока фильтрованный целевой угол αCF поворота не сравняется с целевым углом αС поворота.
Так же, как и в начале указанной фазы вмешательства РН, после этого возобновления содействия управлению предусмотрено также, что, как только разность между фильтрованным целевым углом αCF поворота и целевым углом αС поворота аннулируется или меняет знак, фильтрованный целевой угол αCF поворота фильтруют таким образом, чтобы он стремился к указанному целевому углу αС поворота, имея при этом скорость изменения, абсолютное значение которое остается меньше указанного второго порога SE2, то есть чтобы он стремился к указанному целевому углу αС поворота, отвечая при этом вышеуказанному неравенству (F3).
Описанные выше операции этапа с) можно осуществлять, например, при помощи микропроцессора вышеупомянутого электронного модуля анализа, причем этот микропроцессор исполняет компьютерную программу, разработанную первоначально во время доводки этого способа при помощи операционной среды Simulink® (зарегистрированный товарный знак).
В этом случае операцию iii) можно, например, осуществлять, используя специальный блок фильтрации, полученный посредством модификации блока фильтрации “Rate_Limiter” операционной среды Simulink® для добавления к этому блоку фильтрации “Rate_Limiter” дополнительных функций и входов. Это дополнительные входы могут, например, содержать вход, предназначенный для приема команды возвращения к нулю, и вход, предназначенный для приема значения возвращения к нулю. В этом случае вышеупомянутые дополнительные функции включают в себя функцию возвращения к нулю выхода этого специального блока фильтрации, позволяющего по команде придавать этому выходу значение, равное вышеупомянутому значению возвращения к нулю.
Для осуществления операции iii) на вход этого специального блока фильтрации передают действительный угол αЕ поворота на вход, предназначенный для приема значения возвращения к нулю. В этом случае передают также целевой угол αС поворота на вход этого специального блока фильтрации, подобного входу “Input” блока “Rate_Limiter”. На вход этого специального блока фильтрации, соответствующего входу “Rising siew rate” блока “Rate_Limiter”, направляют также порог, применяемый для фильтрации временного изменения этого целевого угла αС поворота. Как было указано выше, этот применяемый порог соответствует в начале указанной фазы вмешательства РН первому порогу SE1, затем он соответствует второму порогу SE2, как только разность между фильтрованным целевым углом αCF поворота и целевым порогом αС поворота аннулируется или меняет знак, а третий порог SE3 применяют во время фазы возобновления содействия управлению автотранспортным средством после того, как это усиление было прекращено. В этом случае фильтрованный целевой угол αCF поворота получают через выход этого специального блока фильтрации.
После описанных выше операций фильтрации операция iii) дополнительно включает в себя операцию, в ходе которой ограничивают абсолютное значение фильтрованного целевого угла αCF поворота, чтобы оно оставалось меньше определенного порога αMAX безопасности, то есть чтобы фильтрованный целевой угол αCF поворота удовлетворял следующему неравенству (F6):

В частности:
- если неравенство (F6) выполняется, для фильтрованного целевого угла αCF поворота сохраняют значение, полученное после описанных выше операций фильтрации (операции iii)),
- если фильтрованный целевой угол αCF поворота превышает этот порог αMAX безопасности, значение фильтрованного целевого угла αCF поворота заменяют значением этого порога αMAX безопасности, и
- если фильтрованный целевой угол αCF поворота меньше противоположного значения -αMAX этого порога безопасности, заменяют значение фильтрованного целевого угла αCF поворота на противоположное значение -αMAX этого порога безопасности.
За описанной выше операцией iii) следует операция iv), представленная на фиг. 1 в виде блока В3, в ходе которой определяют поправочный крутящий момент ТС для приложения к органу OD рулевого управления транспортного средства в зависимости, в частности, от определенного ранее фильтрованного целевого угла αCF поворота.
В частности, в данном случае операция iv) включает в себя первый подэтап, представленный на фиг. 1 в виде блока В31, в ходе которого определяют заданное значение  крутящего момента, в частности, в зависимости от фильтрованного целевого угла αС поворота и от действительного угла αЕ поворота. Это заданное значение крутящего момента соответствует крутящему моменту, предназначенному для приложения к органу OD рулевого управления транспортного средства, чтобы этот орган OD рулевого управления достиг указанного фильтрованного целевого угла поворота, то есть, чтобы действительный угол αЕ поворота достиг этого фильтрованного целевого угла αCF поворота.
крутящего момента, в частности, в зависимости от фильтрованного целевого угла αС поворота и от действительного угла αЕ поворота. Это заданное значение крутящего момента соответствует крутящему моменту, предназначенному для приложения к органу OD рулевого управления транспортного средства, чтобы этот орган OD рулевого управления достиг указанного фильтрованного целевого угла поворота, то есть, чтобы действительный угол αЕ поворота достиг этого фильтрованного целевого угла αCF поворота.
Это заданное значение крутящего момента получают, например, при помощи корректора типа ПИД (пропорционально-интегрально-дифференциального корректора).
Операция iv) содержит также второй подэтап, показанный на фиг. 1 в виде блока В32, в ходе которого определяют поправочный крутящий момент ТС для приложения к органу OD рулевого управления автотранспортного средства, в частности, в зависимости от заданного значения крутящего момента и от прикладываемого крутящего момента ТА, которым водитель транспортного средства воздействует на этот орган OD рулевого управления.
Крутящий момент ТА, прикладываемый водителем транспортного средства к органу OD рулевого управления, получают при помощи вышеупомянутого датчика крутящего момента автотранспортного средства.
Определенный таким образом поправочный крутящий момент ТС прикладывают к органу OD рулевого управления транспортного средства при помощи вышеупомянутого привода, добавляя его к крутящему моменту ТА, прикладываемому водителем транспортного средства к этому органу OD рулевого управления.
В данном случае поправочный крутящий момент ТС определяют в ходе этого подэтапа таким образом, чтобы:
- он был равен разности  между заданным значением крутящего момента и крутящим моментом ТА, прикладываемым водителем транспортного средства к этому органу OD рулевого управления,
между заданным значением крутящего момента и крутящим моментом ТА, прикладываемым водителем транспортного средства к этому органу OD рулевого управления,
- его абсолютное значение меньше абсолютного значения этой разности.
Сразу после включения этой фазы вмешательства РН, например, поправочный крутящий момент ТС определяют таким образом, чтобы он был равен этой разности между заданным значением крутящего момента и крутящим моментом ТА, прикладываемым водителем транспортного средства к этому органу OD рулевого управления.
В ходе этой фазы вмешательства РН, когда обнаруживают, что неожиданный сход автотранспортного средства с занимаемой им полосы движения больше не ожидается, и когда прикладываемый водителем крутящий момент ТА показывает, что этот водитель активно управляет рулевым управлением автотранспортного средства, поправочный крутящий момент ТС определяют таким образом, чтобы он имел абсолютное значение, меньшее абсолютного значения этой разности . В такой ситуации, в частности, поправочный крутящий момент ТС аннулируют, поэтому содействие управлению транспортным средством прекращается. В данном случае считается, что прикладываемый водителем крутящий момент ТА показывает, что водитель активно управляет рулевым управлением автотранспортного средства, если этот крутящий момент превышает заданный определенный порог. В варианте тот факт, что водитель активно управляет рулевым управлением автотранспортного средства, можно определить на основании изменения во времени заданного значения крутящего момента.
Предпочтительно в этой ситуации, когда больше нет необходимости в содействии управлению (чтобы избегать неожиданного схода с занимаемой полосы движения), этот признак обеспечивает больше свободы для водителя транспортного средства в его управлении этим транспортным средством. Действительно, в этом случае поправочный крутящий момент ТС, прикладываемый к органу OD рулевого управления транспортного средства в дополнение к крутящему моменту ТА, которым действует водитель, является нулевым (или по крайней мере имеет ограниченное значение).
Это содействие управлению можно также прекратить, если обнаруживают, что автотранспортное средство в достаточной мере приблизилось к указанной целевой траектории, и если прикладываемый водителем крутящий момент ТА показывает, что этот водитель активно управляет автотранспортным средством.
После такого прекращения содействия управлению, когда обнаруживают неожиданный сход автотранспортного средства с занимаемой им полосы движения, включают возобновление содействие управлению, снова прикладывая указанный поправочный крутящий момент к указанному органу OD рулевого управления транспортного средства, то есть, в частности, опять определяя поправочный крутящий момент ТС таким образом, чтобы он был равен заданному значению крутящего момента.
Факультативно, это возобновление содействия управлению можно также активировать, когда значение разности между действительным углом поворота и фильтрованным целевым углом поворота становится больше заданного порога.
Это возобновление содействия управлению может быть также активировано, когда прикладываемый водителем крутящий момент ТА показывает, что этот водитель больше не управляет активно автотранспортным средством. Это указание можно, например, вывести из того, что этот прикладываемый водителем крутящий момент ТА имеет абсолютное значение, меньшее заданного порогового крутящего момента, ниже которого считается, что водитель не воздействует на орган OD рулевого управления автотранспортного средства для коррекции траектории этого транспортного средства.
В данном случае операции i)-iv) осуществляют непрерывно, в том числе когда прекращают содействие управлению посредством аннулирования поправочного крутящего момента ТС.
Благодаря фильтрации целевого угла αС поворота, осуществляемой во время операции iii), фильтрованный целевой угол αCF поворота, на основании которого определяют этот поправочный крутящий момент ТС, изменяется во времени плавно, непрерывно и без рывков, в том числе в начале указанной фазы вмешательства РН или во время возобновления содействия управлению после прекращения этого содействия управлению.
Это плавное изменение поправочного крутящего момента является комфортным для водителя транспортного средства и не дает ему застать себя врасплох или помешать ему при управлении транспортного средства, в частности, в ситуации непосредственной угрозы схода с полосы движения, при которой исключительно желательно избегать неожиданности для водителя, чтобы не вызвать у него неконтролируемую реакцию.
Кроме того, возможность более быстрых изменений этого фильтрованного целевого угла αCF поворота после того, как он сравняется с (не фильтрованным) целевым углом αС поворота, посредством применения второго порога SE2, превышающего первый порог SE1, во время фильтрации целевого угла αС поворота, позволяет получить лучшие характеристики этого способа содействия управлению, в частности, короткое время реакции, что позволяет точно следовать целевой траектории.
Коме того, ограничение абсолютного значения целевого угла αCF поворота, чтобы оно оставалось ниже порога αMAX безопасности, позволяет также ограничить абсолютное значение поправочного крутящего момента ТС. Этот признак повышает надежность этого способа, так как не дает поправочному крутящему моменту ТС достигать слишком больших значений (по абсолютной величине), что могло бы оказаться опасным.
На фиг. 2-4 показано изменение в течение времени t различных величин, считываемых или оцениваемых в соответствии с описанным выше способом содействия управлению, для примера пути автотранспортного средства, в котором применяют этот способ.
В частности, на фиг. 2 показано изменение в течение времени t действительного угла αЕ поворота, целевого угла αС поворота и фильтрованного целевого угла αCF поворота для этого примера пути.
На фиг. 3 для каждого момента времени этого пути в графическом виде показано, какой среди первого SE1, второго SE2 и третьего SE3 порогов применяют на этапе iii) для фильтрации целевого угла αС поворота.
На фиг. 4 для этого же пути автотранспортного средства в графическом виде показано, в какой момент времени включают указанную фазу вмешательства РН. На фиг. 4 показан также временной интервал SUSP этого пути, в течение которого прекращают содействие управлению этого транспортного средства, аннулируя поправочный крутящий момент ТС, прикладываемый к органу OD рулевого управления этого транспортного средства.
В момент времени t1 (фиг. 2-4) обнаруживают неожиданный сход автотранспортного средства с занимаемой им полосы движения и включают указанную фазу вмешательства РН.
Как было указано выше, в ходе этой фазы вмешательства РН к органу OD рулевого управления автотранспортного средства прикладывают поправочный крутящий момент ТС, определенный, в частности, в зависимости от фильтрованного целевого угла αCF поворота.
На фиг. 2 видно, что в первоначальный момент t1 этой фазы вмешательства РН целевой угол αС поворота имеет значение, существенно отличающееся от действительного угла αЕ поворота:  , что можно было предвидеть заранее. Действительно, если поддерживать значение действительного угла αЕ поворота по его значению
, что можно было предвидеть заранее. Действительно, если поддерживать значение действительного угла αЕ поворота по его значению  в этот первоначальный момент t1, автотранспортное средство вероятно сошло бы с занимаемой им полосы движения (был бы обнаружен неожиданный сход с этой полосы движения), тогда как значение фильтрованного целевого угла αCF поворота в этот первоначальный момент t1 стремится при приложении к органу OD рулевого управления транспортного средства привести это транспортное средство к целевой траектории, которая удерживает его на этой полосе движения.
в этот первоначальный момент t1, автотранспортное средство вероятно сошло бы с занимаемой им полосы движения (был бы обнаружен неожиданный сход с этой полосы движения), тогда как значение фильтрованного целевого угла αCF поворота в этот первоначальный момент t1 стремится при приложении к органу OD рулевого управления транспортного средства привести это транспортное средство к целевой траектории, которая удерживает его на этой полосе движения.
Сразу после этого первоначального момента времени t1 порогом, которым ограничена скорость изменения фильтрованного целевого угла αCF поворота, является первый порог SE1, как показано на фиг. 3.
На фиг. 2 можно отметить, что фильтрованный целевой угол αCF поворота первоначально равен действительному углу αЕ поворота, затем стремится к целевому углу αС поворота, имея скорость изменения, то есть в данном случае крутизну кривой с абсолютным значением, меньшим или равным (в данном случае равным) этому первому порогу SE1.
С учетом поправочного крутящего момента ТС, прикладываемого к органу OD рулевого управления транспортного средства, действительный угол αЕ поворота изменяется таким образом, что стремится к этому фильтрованному целевому углу αCF поворота, как показано на фиг. 2.
Фильтрованный целевой угол αCF поворота сравнивается с целевым углом αС поворота в следующий момент времени t2 (t2>t1), то есть в этот момент t2 разность между фильтрованным целевым углом поворота и целевым углом поворота аннулируется или меняет знак (в данном случае аннулируется).
Начиная с этого момента t2 порогом, которым ограничивают скорость изменения фильтрованного целевого угла αCF поворота, является второй порог SE2, как показано на фиг. 3. Как было указано ранее, этот второй порог SE2 превышает первый порог SE1.
В следующий момент времени t21 (t21>t2) обнаруживают, что автотранспортное средство приблизилось к указанной целевой траектории (в частности, обнаруживают, что расстояние, отделяющее автотранспортное средство от этой целевой траектории, меньше заданного предельного расстояния). Кроме того, прикладываемый водителем крутящий момент ТА показывает в этот момент t21, что водитель активно воздействует на рулевое управление автотранспортного средства. Следовательно, начиная с этого момента t21, содействие управлению прекращают (фиг. 4), аннулируя поправочный крутящий момент ТС в блоке фильтрации В23, показанном на фиг. 1.
В следующий момент времени t3 (t3>t21) опять обнаруживают неожиданный сход автотранспортного средства с занимаемой им полосы движения в отсутствие явного воздействия со стороны водителя автотранспортного средства на орган рулевого управления этого транспортного средства. В этом случае содействие управлению возобновляется.
Начиная с этого первоначального момента t3 возобновления содействия управлению, порогом, которым ограничена скорость изменения фильтрованного целевого угла αCF поворота, является третий порог SE3, как показано на фиг. 3. Можно напомнить, что этот третий порог SE3 ниже второго порога SE2 и, кроме того, в данном случае ниже первого порога SE1.
На фиг. 2 можно отметить, что фильтрованный целевой угол αCF поворота равен действительному углу αЕ поворота в первоначальный момент t3 возобновления содействия управлению, затем стремится к целевому углу αС поворота со скоростью изменения, то есть в данном случае с крутизной, абсолютное значение которой меньше или равно (в данном случае равно) этому третьему порогу SE3.
Здесь опять, с учетом поправочного крутящего момента ТС, прикладываемого к органу OD рулевого управления транспортного средства, действительный угол αЕ поворота изменяется, стремясь к этому фильтрованному целевому углу αCF поворота, как показано на фиг. 2.
Фильтрованный целевой угол αCF поворота сравнивается с целевым углом αС поворота в следующий момент t4 (t4>t3), то есть в этот момент t4 разность между фильтрованным целевым углом поворота и целевым углом поворота аннулируется или меняет знак (в данном случае аннулируется).
Начиная с этого момента t4, как и ранее, порогом, которым ограничивают скорость изменения фильтрованного целевого угла αCF поворота, является второй порог SE2 (фиг.2).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОДЕЙСТВИЯ УПРАВЛЕНИЮ АВТОТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2734440C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2014 |
|
RU2665208C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2571679C1 |
| УСТРОЙСТВО И СПОСОБ ВЫБОРА РЕЖИМА ПАРКОВКИ | 2011 |
|
RU2523861C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2636636C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСТРЕННЫМ АВТОНОМНЫМ ТОРМОЖЕНИЕМ | 2020 |
|
RU2814654C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ В ПОЛОСЕ | 2014 |
|
RU2647823C2 |
| СИСТЕМА И СПОСОБ НЕПРЯМОГО ОБНАРУЖЕНИЯ НЕДОСТАТОЧНОГО ДАВЛЕНИЯ ШИНЫ | 2014 |
|
RU2631722C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2644063C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581809C1 |
Изобретение относится к способу содействия управлению автотранспортным средством. Способ содействия управлению автотранспортным средством, занимающим полосу движения, содержащий этапы, на которых считывают по меньшей мере один элемент данных, относящийся к положению автотранспортного средства относительно полосы движения, и проверяют, имеется ли неожиданный сход или начало схода автотранспортного средства с указанной полосы движения. Если обнаруживают неожиданный сход, включают фазу вмешательства, во время которой к органу рулевого управления прикладывают поправочный крутящий момент, чтобы автотранспортное средство следовало по целевой траектории. Вычисление поправочного крутящего момента включает в себя следующие операции, на которых считывают действительный угол поворота органа рулевого управления транспортного средства, в зависимости от элемента данных, определяют целевой угол поворота, в пределах которого необходимо расположить указанный орган рулевого управления, чтобы автотранспортное средство следовало по целевой траектории, определяют фильтрованный целевой угол поворота таким образом, чтобы в первоначальный момент времени указанной фазы вмешательства фильтрованный целевой угол поворота был равен действительному углу поворота и чтобы после этого первоначального момента времени фильтрованный целевой угол поворота стремился к указанному целевому углу поворота, имея при этом скорость изменения, абсолютное значение которой остается ниже первого определенного порога. Как только разность между фильтрованным целевым углом поворота и целевым углом поворота аннулируется или меняет знак, фильтрованный целевой угол поворота стремится к указанному целевому углу поворота, имея при этом скорость изменения, абсолютное значение которой остается ниже второго определенного порога, который превышает указанный первый порог, и в зависимости от указанного фильтрованного целевого угла поворота определяют предназначенный для приложения указанный поправочный крутящий момент. Достигается повышение безопасности управления транспортным средством. 8 з.п. ф-лы, 4 ил.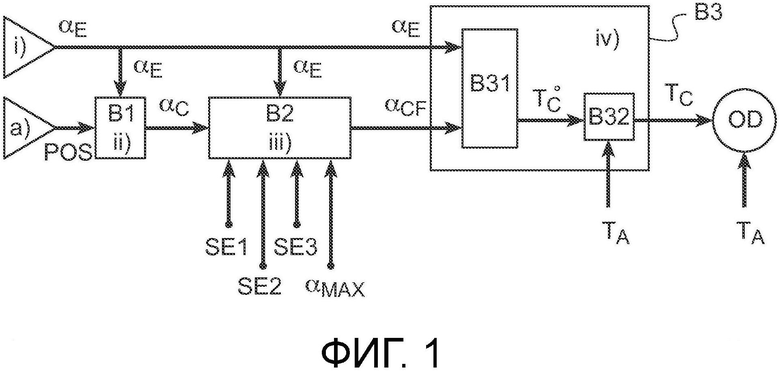
1. Способ содействия управлению автотранспортным средством, занимающим полосу движения, содержащий этапы, на которых:
а) считывают по меньшей мере один элемент данных, относящийся к положению (POS) автотранспортного средства относительно полосы движения,
b) проверяют, имеется ли неожиданный сход или начало схода автотранспортного средства с указанной полосы движения,
с) если обнаруживают этот неожиданный сход, включают фазу вмешательства (PH), во время которой к указанному органу (OD) рулевого управления прикладывают поправочный крутящий момент (TC), чтобы автотранспортное средство следовало по целевой траектории,
при этом вычисление указанного поправочного крутящего момента (TC) включает в себя следующие операции:
i) считывают действительный угол (αЕ) поворота указанного органа (OD) рулевого управления транспортного средства,
ii) в зависимости от элемента данных, считанного на этапе а), определяют целевой угол (αС) поворота, в пределах которого необходимо расположить указанный орган (OD) рулевого управления, чтобы автотранспортное средство следовало по целевой траектории,
iii) определяют фильтрованный целевой угол (αCF) поворота таким образом, чтобы:
- в первоначальный момент времени указанной фазы вмешательства (PH) фильтрованный целевой угол (αCF) поворота был равен действительному углу (αЕ) поворота в указанный первоначальный момент, и чтобы
- после этого первоначального момента времени фильтрованный целевой угол (αCF) поворота стремился к указанному целевому углу (αС) поворота, имея при этом скорость изменения, абсолютное значение которой остается ниже первого определенного порога (SE1), а как только разность между фильтрованным целевым углом (αCF) поворота и целевым углом (αС) поворота аннулируется или меняет знак, фильтрованный целевой угол (αCF) поворота стремился к указанному целевому углу (αС) поворота, имея при этом скорость изменения, абсолютное значение которой остается ниже второго определенного порога (SE2), который превышает указанный первый порог (SE1), и
iv) в зависимости от указанного фильтрованного целевого угла (αCF) поворота определяют предназначенный для приложения указанный поправочный крутящий момент (TC).
2. Способ по п. 1, в котором указанный неожиданный сход обнаруживают в зависимости от элемента данных, считанного на этапе а).
3. Способ по п. 1 или 2, в котором указанный неожиданный сход обнаруживают в зависимости от активного или неактивного состояния мигающих указателей поворота автотранспортного средства.
4. Способ по одному из пп. 1-3, в котором поправочный крутящий момент (TC), прикладываемый к указанному органу (OD) рулевого управления транспортного средства, определяют также в зависимости от крутящего момента, прикладываемого водителем транспортного средства к этому органу (OD) рулевого управления.
5. Способ по п. 4, в котором в ходе указанной фазы вмешательства (PH) прекращают содействие управлению посредством аннулирования поправочного крутящего момента (TC), когда крутящий момент (TА), прикладываемый водителем транспортного средства к указанному органу (OD) рулевого управления, превышает заданный определенный порог.
6. Способ по п. 5, в котором, когда содействие управлению прекращено и обнаруживается неожиданный сход автотранспортного средства с занимаемой им полосы движения, возобновляют содействие управлению посредством возобновления приложения указанного поправочного крутящего момента (TC) к указанному органу (OD) рулевого управления транспортного средства.
7. Способ по п. 6, в котором возобновление содействия управлению осуществляют также в зависимости от крутящего момента (TА), прикладываемого водителем автотранспортного средства к указанному органу (OD) рулевого управления.
8. Способ по п. 6 или 7, в котором во время операции iii) фильтрацию целевого угла (αС) поворота осуществляют таким образом, чтобы:
- в первоначальный момент указанного возобновления содействия управлению фильтрованный целевой угол (αCF) поворота был равен действительному углу (αЕ) поворота в этот первоначальный момент, и чтобы
- после указанного первоначального момента фильтрованный целевой угол (αCF) поворота стремился к указанному целевому углу (αС) поворота, имея при этом скорость изменения, абсолютное значение которой остается ниже третьего заданного определенного порога (SE3), причем этот третий порог (SE3) ниже указанного второго порога (SE2).
9. Способ по одному из пп. 1-8, в котором во время операции iii) фильтрованный целевой угол (αCF) поворота определяют таким образом, чтобы его абсолютное значение оставалось ниже определенного порога (αMAX) безопасности.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ВСПОМОГАТЕЛЬНОЕ ПРИВОДНОЕ УСТРОЙСТВО АВТОМОБИЛЯ | 2008 |
|
RU2483959C2 |

