Область техники, к которой относится изобретение
Настоящее изобретение относится к общей области способов содействия управлению автотранспортными средствами.
В частности, оно касается способа содействия управлению автотранспортным средством, занимающим полосу движения, содержащего следующие этапы:
а) считывают по меньшей мере один элемент данных, относящийся к положению автотранспортного средства относительно полосы движения,
b) считывают крутящий момент, которым водитель автотранспортного средства действует на орган рулевого управления автотранспортного средства, и
с) в зависимости от указанного элемента данных определяют поправочный крутящий момент для воздействия на указанный орган рулевого управления с учетом указанного прикладываемого крутящего момента, чтобы автотранспортное средство следовало по целевой траектории.
Уровень техники
В настоящее время многие автотранспортные средства оснащены системой содействия управлению, позволяющей при помощи электрического двигателя создавать дополнительный крутящий момент на рулевой колонке транспортного средства, чтобы помогать водителю этого транспортного средства поворачивать рулевое колесо этого транспортного средства.
Как известно, автотранспортное средство оборудуют также системой содействия движению, содержащей переднюю камеру или другой датчик, такой как радар, позволяющие определять положение этого транспортного средства на занимаемой им полосе движения.
Если обнаруживают отклонение транспортного средства относительно центра этой полосы движения или если обнаруживают, что это транспортное средство начинает сходить с этой полосы движения, на рулевую колонку можно воздействовать поправочным крутящим моментом, чтобы скорректировать траекторию транспортного средства и привести его по существу к центру этой полосы движения. Этот поправочный крутящий момент добавляется к крутящему моменту, прикладываемому к рулевому колесу водителем транспортного средства.
Такая система содействия движению, известная из документа ЕР 2591983, позволяет ограничивать сходы транспортного средства с дороги и/или позволяет удерживать транспортное средство по существу по центру занимаемой им полосы движения без участия водителя или лишь с его ограниченным участием.
Согласно документу ЕР 2591983, значение поправочного крутящего момента, создаваемого на рулевой колонке транспортного средства, модулируют с учетом прикладываемого крутящего момента, которым водитель транспортного средства действует на рулевое колесо этого транспортного средства, и с учетом того, что автотранспортное средство движется по прямой линии или, наоборот, входит в крутой вираж.
Однако во время работы этой системы содействия удержанию транспортного средства на его полосе движения поправочный крутящий момент, действующий на рулевую колонку этого транспортного средства, может противодействовать крутящему моменту, прикладываемому водителем к рулевому колесу. Иначе говоря, этот поправочный крутящий момент может иметь знак, противоположный знаку крутящего момента, которым водитель действует на рулевое колесо транспортного средства.
В данном случае главным недостатком этого решения является возникающее у водителя исключительно неприятное ощущение, что он преодолевает действие системы содействия удержанию транспортного средства на его полосе движения.
Сущность изобретения
В этом контексте настоящим изобретением предложен упомянутый во вступительной части способ содействия управлению автотранспортным средством, дополнительно содержащий следующие этапы:
d) определяют фильтрованный поправочный крутящий момент в зависимости от указанного поправочного крутящего момента таким образом, чтобы этот фильтрованный поправочный крутящий момент систематически имел меньшее значение по сравнению с этим поправочным крутящим моментом, когда указанный прикладываемый крутящий момент по существу противодействует указанному поправочному крутящему моменту, и
e) указанный фильтрованный поправочный крутящий момент прикладывают к органу рулевого управления автотранспортного средства.
Это меньшее значение может быть, в частности, нулевым, то есть этот фильтрованный поправочный крутящий момент может быть, в частности, аннулирован, когда указанный прикладываемый крутящий момент по существу противодействует указанному поправочному крутящему моменту.
Таким образом, можно максимально избегать неприятного ощущения преодоления действия поправочного крутящего момента.
В ходе этого способа считается, что крутящий момент, который водитель прикладывает к органу рулевого управления транспортного средства, противодействует указанному поправочному крутящему моменту, например, когда указанный прикладываемый крутящий момент имеет:
- абсолютное значение, превышающее заданный предельный крутящий момент, и
- знак, противоположный знаку указанного поправочного крутящего момента.
Предпочтительно в рамках способа содействия управлению в соответствии с изобретением предусматривают следующее:
- на этапе а) указанный элемент данных содержит боковое отклонение между автотранспортным средством и указанной целевой траекторией, и
- на этапе d), когда указанный прикладываемый крутящий момент по существу противодействует указанному поправочному крутящему моменту и указанное боковое отклонение меньше определенного порога, аннулируют фильтрованный поправочный крутящий момент.
Способ содействия управлению в соответствии с изобретением имеет также следующие другие не ограничительные и предпочтительные признаки:
- на этапе d), когда боковое отклонение превышает указанный определенный порог, фильтрованный поправочный крутящий момент определяют таким образом, чтобы он имел не равное нулю значение, даже если прикладываемый крутящий момент по существу противодействует указанному поправочному крутящему моменту;
- на этапе d), когда боковое отклонение превышает указанный определенный порог, фильтрованный поправочный крутящий момент определяют таким образом, чтобы он имел не равное нулю значение при условии, что указанное боковое отклонение не уменьшается со скоростью изменения, превышающей заданную предельную скорость изменения, в противном случае ему придают нулевое значение;
- указанную заданную предельную скорость изменения определяют в зависимости от значения указанного бокового отклонения;
- на этапе d), когда боковое отклонение превышает указанный определенный порог, фильтрованный поправочный крутящий момент определяют таким образом, чтобы он имел не равное нулю значение: которое равно указанному поправочному крутящему моменту, если абсолютное значение указанного поправочного крутящего момента меньше предельного возвратного крутящего момента, и который имеет абсолютное значение, равное указанному возвратному крутящему моменту, если абсолютное значение поправочного крутящего момента превышает или равно этому предельному возвратному крутящему моменту;
- предельный возвратный крутящий момент является положительным и тем большим, чем больше указанное боковое отклонение;
- предельный возвратный крутящий момент является положительным и тем большим, чем быстрее увеличивается указанное боковое отклонение;
- на этапе d), когда указанный прикладываемый водителем крутящий момент и указанный поправочный крутящий момент имеют одинаковый знак, указанный фильтрованный поправочный крутящий момент определяют таким образом, чтобы фильтрованный поправочный крутящий момент был равен указанному поправочному крутящему моменту, если абсолютное значение указанного поправочного крутящего момента меньше заданного порога безопасности, и чтобы фильтрованный поправочный крутящий момент имел абсолютное значение, равное этому порогу безопасности, если абсолютное значение поправочного крутящего момента превышает этот порог безопасности;
- на этапе d), если автотранспортное средство находится с внутренней стороны виража указанной полосы движения и абсолютное значение прикладываемого водителем крутящего момента превышает предельный крутящий момент, то в этом случае аннулируют фильтрованный поправочный крутящий момент;
- на этапе d), если автотранспортное средство находится с внутренней стороны виража указанной полосы движения и абсолютное значение прикладываемого водителем крутящего момента превышает предельный крутящий момент, то фильтрованный поправочный крутящий момент аннулируют также при условии, что поправочный крутящий момент стремится привести автотранспортное средство к центру полосы движения;
- на этапе d), фильтрованный поправочный крутящий момент определяют таким образом, чтобы его абсолютное значение оставалось меньше указанного заданного порога безопасности.
- на этапе d), фильтрованный поправочный крутящий момент определяют таким образом, чтобы абсолютное значение его скорости изменения оставалось меньше заданной максимальной скорости изменения.
Подробное описание примера осуществления изобретения
Изобретение и его осуществление будут более понятны из нижеследующего описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи.
На этих прилагаемых чертежах:
Фиг. 1 - блок-схема операций, осуществляемых в ходе способа содействия управлению автотранспортным средством в соответствии с изобретением.
Фиг. 2 - более детальная логическая блок-схема одной из операций, показанных на фиг. 1.
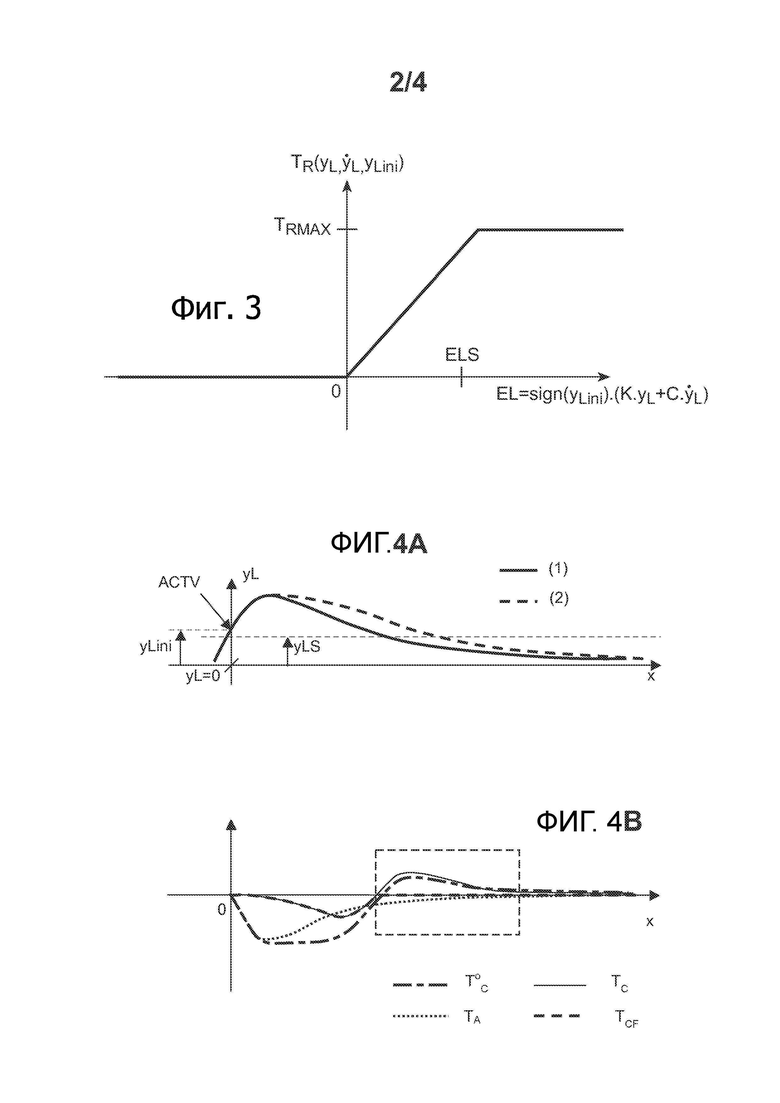
Фиг. 3 - предельный возвратный крутящий момент в зависимости от возвратной переменной, характеризующей, в частности, боковое отклонение этого автотранспортного средства относительно целевой траектории.
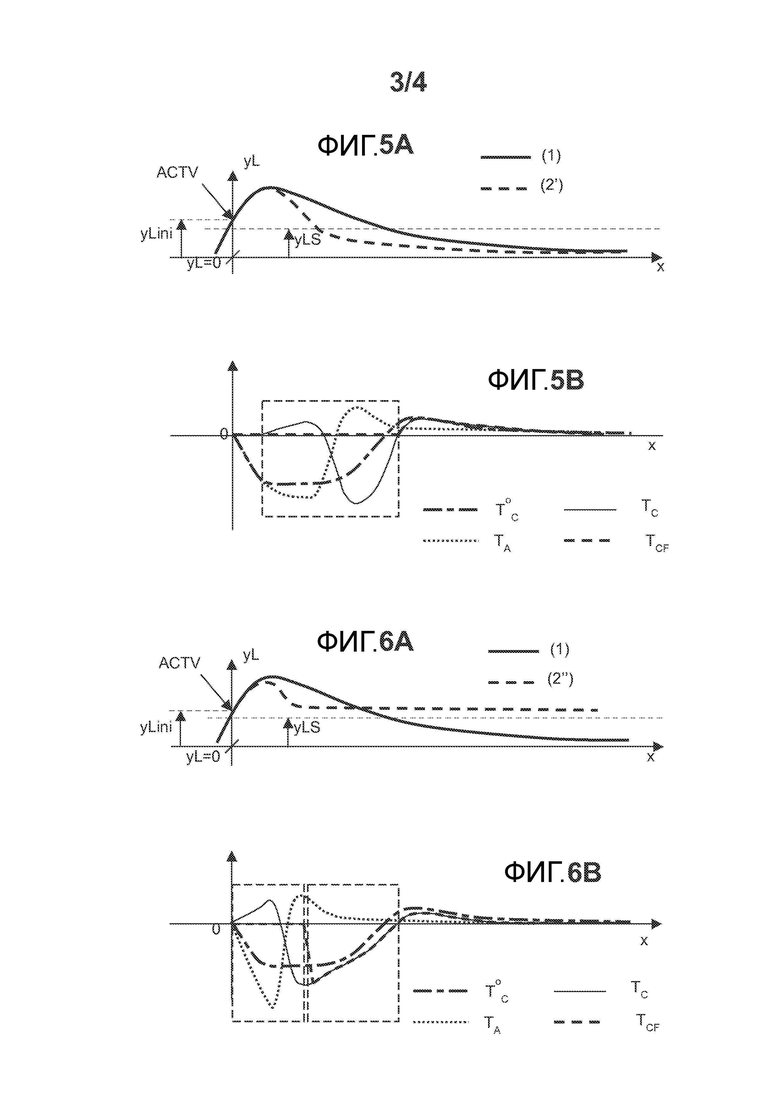
Фиг. 4А и 4В - изменение во времени различных величин, которые могут быть считаны или определены в ходе способа, показанного на фиг. 1, когда водитель имеет реакцию первого типа.
Фиг. 5А и 5В. 6А и 6В, 7А и 7В - изменение во времени тех же величин, что и на фиг. 4А и 4В, для трех других типов реакции водителя.
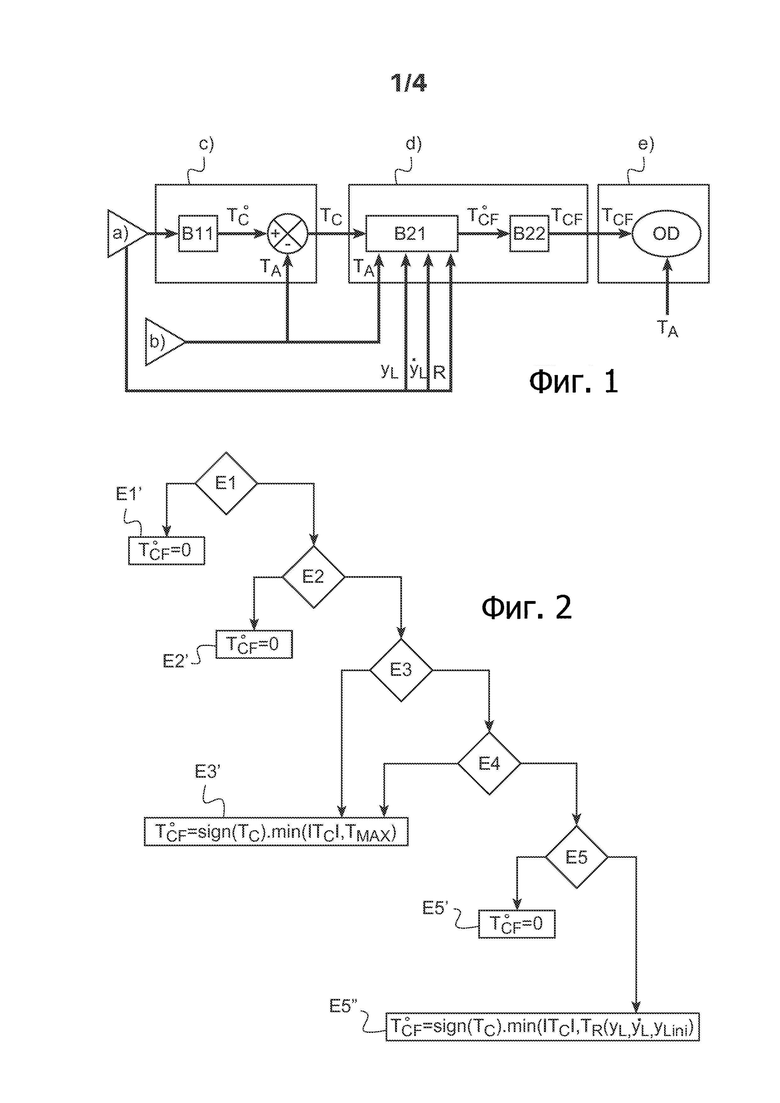
На фиг. 1 представлены различные операции, позволяющие осуществлять способ содействия управлению автотранспортным средством.
Для этого автотранспортное средство содержит управляемые колеса, орган OD рулевого управления, позволяющий действовать на управляемые колеса для изменения направления транспортного средства, и средство считывания крутящего момента, которым водитель автотранспортного средства действует на этот орган OD рулевого управления (в дальнейшем этот крутящий момент будет называться «прикладываемым крутящим моментом ТА»). В данном случае это средство считывания представляет собой датчик крутящего момента, позволяющий измерять прикладываемый крутящий момент ТА.
В данном случае орган OD рулевого управления соответствует рулевой колонке автотранспортного средства, и прикладываемый крутящий момент ТА действует на этот орган OD рулевого управления через рулевое колесо этого транспортного средства.
В варианте орган рулевого управления автотранспортного средства может соответствовать, например, зубчатой рейке рулевого управления этого транспортного средства.
Кроме того, автотранспортное средство содержит привод, такой как электрический двигатель, выполненный с возможностью приложения фильтрованного поправочного крутящего момента TCF к органу OD рулевого управления этого транспортного средства.
Этот фильтрованный поправочный крутящий момент TCF добавляется к прикладываемому крутящему моменту ТА, которым, как было указано выше, водитель действует на орган OD рулевого управления автотранспортного средства (фиг. 1).
Автотранспортное средство содержит также датчик, выполненный с возможностью считывать по меньшей мере один элемент данных, относящийся к положению этого автотранспортного средства относительно занимаемой им полосы движения.
В данном случае этот датчик содержит видеокамеру, поле обзора которой охватывает участок этой полосы движения, находящийся перед автотранспортным средством. В этом случае указанный элемент данных, относящийся к положению этого автотранспортного средства на полосе движения, определяют в зависимости от изображений, снятых видеокамерой.
В варианте, вместо видеокамеры датчик может содержать, например, радар или лидар (транслитерация англо-саксонского сокращения от “Light Detection And Ranging”), позволяющий обнаруживать объекты по краям этой полосы движения, такие как ограждающий барьер, парапет или линия дорожной разметки. В этом случае указанный элемент данных, относящийся к положению этого автотранспортного средства, определяют на основании отраженного сигнала, получаемого этим датчиком.
В данном случае элемент данных, относящийся к положению автотранспортного средства относительно занимаемой им полосы движения, соответствует, в частности, боковому отклонению yL между автотранспортным средством и целевой траекторией, проходящей вдоль этой полосы движения.
Этой целевой траекторией является, например, траектория, следующая по существу по центру полосы движения, занимаемой автотранспортным средством. Вместе с тем, эта целевая траектория может отклоняться от центра этой полосы движения, в частности, на вираже этой полосы движения.
Вышеупомянутое боковое отклонение yL в данном случае соответствует отклонению, разделяющему автотранспортное средство и указанную целевую траекторию, на некотором расстоянии обзора спереди этого транспортного средства, то есть, более конкретно, это боковое отклонение yL соответствует боковому отклонению, разделяющему:
- продольную ось транспортного средства, которая проходит по существу посередине этого транспортного средства, и
- указанную целевую траекторию,
причем это боковое отклонение yL определяют перпендикулярно к указанной целевой траектории на некотором расстоянии (обзора) спереди автотранспортного средства.
Это автотранспортное средство содержит также электронный модуль анализа, выполненный с возможностью определения этого бокового отклонения yL, в данном случае посредством анализа изображения, снимаемого видеокамерой автотранспортного средства. В частности, в данном случае на этом изображении идентифицируют по меньшей мере одну из двух линий дорожной разметки, отмечающих один из краев этой полосы движения, и определяют геометрические характеристики этой линии разметки, такие как ее общая форма и ее положение на изображении. Затем на основании этих геометрических характеристик определяют положение автотранспортного средства относительно этой линии разметки и затем боковое отклонение yL, отделяющее это транспортное средство от указанной целевой траектории.
Этот электронный модуль анализа выполнен также с возможностью определения фильтрованного поправочного крутящего момента TCF для приложения к органу OD рулевого управления автотранспортного средства, в частности, в зависимости от:
- указанного бокового отклонения yL, и
- прикладываемого крутящего момента ТА.
Кроме того, этот фильтрованный поправочный крутящий момент TCF можно также определять в зависимости от угла поворота органа рулевого управления транспортного средства.
Этот электронный модуль анализа выполнен также с возможностью управлять вышеупомянутым приводом таким образом, чтобы этот привод прикладывал ранее определенный фильтрованный поправочный крутящий момент TCF к органу OD рулевого управления автотранспортного средства.
Способ содействия управлению, осуществляемый электронным модулем анализа, в основном содержит следующие пять этапов:
а) считывают по меньшей мере один элемент данных, относящийся к положению автотранспортного средства относительно занимаемой им полосы движения, в данном случае боковое отклонение yL,
b) считывают прикладываемый крутящий момент ТА,
с) в зависимости от указанного элемента данных (в данном случае от бокового отклонения yL) определяют поправочный крутящий момент TC для приложения к указанному органу OD рулевого управления с учетом указанного прикладываемого крутящего момента ТА, чтобы автотранспортное средство следовало по целевой траектории,
d) определяют фильтрованный поправочный крутящий момент TCF в зависимости от указанного поправочного крутящего момента TC таким образом, чтобы этот фильтрованный поправочный крутящий момент TCF систематически имел меньшее значение по сравнению с этим поправочным крутящим моментом TC, когда указанный прикладываемый крутящий момент ТА по существу противодействует указанному поправочному крутящему моменту TC, и
e) указанный фильтрованный поправочный крутящий момент TCF прикладывают к органу OD рулевого управления автотранспортного средства при помощи вышеупомянутого привода.
Далее следует более подробное описание этапов а) - е), схематично показанных в виде блок-схемы на фиг. 1.
В данном случае на этапе е), кроме съемки изображения участка полосы движения, занимаемой автотранспортным средством, находящегося спереди транспортного средства, посредством анализа этого изображения определяют указанное боковое отклонение yL, как было указано выше. В ходе этого этапа а) определяют также радиус кривизны R этого участка указанной полосы движения.
На этапе b) датчик крутящего момента позволяет измерить прикладываемый крутящий момент ТА.
В данном случае этап с) содержит первую операцию, соответствующую блоку В11, показанному на фиг. 1, в ходе которой определяют управляющий крутящий момент  для приложения к органу OD рулевого управления автотранспортного средства, чтобы это транспортное средство следовало по целевой траектории.
для приложения к органу OD рулевого управления автотранспортного средства, чтобы это транспортное средство следовало по целевой траектории.
Этот управляющий крутящий момент соответствует общему крутящему моменту, которым необходимо воздействовать на этот орган рулевого управления, чтобы транспортное средство следовало по указанной целевой траектории.
В частности, этот управляющий крутящий момент определяют в зависимости от бокового отклонения yL, определенного на предыдущем этапе а), и кроме того, его можно определить в зависимости от действительного угла поворота органа рулевого управления транспортного средства и от других величин, относящихся к движению автотранспортного средства относительно занимаемой им полосы движения, таких как его скорость перемещения относительно этой полосы движения или его скорость поворота r (скорость поворота транспортного средства определяют как его скорость вращения вокруг оси, перпендикулярной к средней плоскости дороги, на которой находится транспортное средство, и ее можно измерять, например, при помощи гирометра).
В данном случае определение управляющего крутящего момента прежде всего включает в себя вычисление требуемого угла поворота AGS для органа рулевого управления автотранспортного средства в зависимости от бокового отклонения yL и от скорости поворота r этого транспортного средства при помощи пропорциональной поправки, то есть по следующей формуле (F1):
AGS = fct1.yL + fct2.r (F1)
где fct1 и fct2 являются двумя мультипликативными константами.
Затем получают управляющий крутящий момент , применяя коррекцию типа ПИД (пропорционально-интегрально-дифференциальную) для разности между этим требуемым углом поворота AGS и действительным углом поворота органа рулевого управления.
Поскольку этот управляющий крутящий момент соответствует общему крутящему моменту и поскольку водитель может уже воздействовать не равным нулю прикладываемым крутящим моментом ТА на орган OD рулевого управления транспортного средства, то затем во время этого этапа с) вычисляют поправочный крутящий момент TC для приложения (при помощи указанного привода), чтобы автотранспортное средство следовало по указанной целевой траектории, с учетом прикладываемого крутящего момента ТА. В частности, в данном случае поправочный крутящий момент TC вычисляют таким образом, чтобы он был равен разности между управляющим крутящим моментом и прикладываемым крутящим моментом ТА (как показано на фиг. 1):
ТС=-ТА (F2)
Во время следующего этапа d) определяют фильтрованный поправочный крутящий момент TCF, который в конечном итоге будет приложен к органу OD рулевого управления транспортного средства, в зависимости от этого поправочного крутящего момента TC, чтобы ограничить или аннулировать значение этого фильтрованного поправочного крутящего момента TCF, если он может ощущаться водителем транспортного средства как противодействующий крутящему моменту, которым он воздействует на рулевое колесо.
Этот этап d), который является, в частности, объектом настоящего изобретения, включает в себя первую операцию, соответствующую блоку В21, показанному на фиг. 1.
В ходе этой первой операции, которая будет подробно ниже описана со ссылками на фиг. 2, на основании поправочного крутящего момента TC определяют базовый фильтрованный поправочный крутящий момент  , учитывая, в частности, прикладываемый крутящий момент ТА.
, учитывая, в частности, прикладываемый крутящий момент ТА.
В частности, базовый фильтрованный поправочный крутящий момент определяют таким образом, чтобы фильтрованный поправочный крутящий момент TCF, в конечном итоге прикладываемый к органу рулевого управления транспортного средства, не противодействовал прикладываемому крутящему моменту ТА, которым водитель воздействует на этот орган рулевого управления, в частности, в ситуациях, в которых коррекция, обеспечиваемая этим фильтрованным поправочным крутящим моментом TCF, может быть не обязательной, чтобы автотранспортное средство следовало или по крайней мере находилось близко к указанной целевой траектории.
Этап d) содержит также вторую, факультативную операцию, соответствующую блоку В22, показанному на фиг. 1, и следующую за указанной первой операцией.
В ходе этой второй операции определяют фильтрованный поправочный крутящий момент TCF, фильтруя определенный ранее базовый фильтрованный поправочный крутящий момент , таким образом, чтобы абсолютное значение скорости изменения фильтрованного поправочного крутящего момента TCF оставалась ниже заданной максимальной скорости изменения txmax.
Первая операция этапа d) в основном содержит пять подэтапов Е1-Е5, схематично представленных на фиг. 2.
Сначала обозначим производную d yL/dt бокового отклонения yL по времени t как «боковая скорость  ».
».
Во время первого из этих подэтапов (подэтап Е1) проверяют, что:
- автотранспортное средство отклоняется от указанной целевой траектории, и что
- поправочный крутящий момент TC может стремиться к увеличению абсолютного значения  боковой скорости , если его прикладывать к органу рулевого управления транспортного средства.
боковой скорости , если его прикладывать к органу рулевого управления транспортного средства.
Если оба вышеуказанных условия выполнены, базовый фильтрованный поправочный крутящий момент аннулируют (подэтап Е1'). Это приводит также к аннулированию фильтрованного поправочного крутящего момента TCF, прикладываемого к органу рулевого управления автотранспортного средства.
В противном случае этот способ продолжается следующим подэтапом Е2.
В частности, в ходе этого подэтапа Е1, чтобы убедиться, что оба описанных выше условия проверяются, вычисляют следующее значение булевой переменной VB1:
( > ε) & (sign (TC) = sign (yLini))
при этом ε является заданным порогом боковой скорости, сверх которого считают, что транспортное средство отклоняется (быстро) от указанной целевой траектории.
Величина yLini соответствует боковому отклонению автотранспортного средства относительно указанной целевой траектории в момент времени, когда включают содействие управлению, то есть в момент времени, начиная от которого фильтрованный поправочный крутящий момент начинает действовать на орган рулевого управления транспортного средства. Это содействие управлению может быть включено (электронным модулем анализа), например, когда автотранспортное средство явно отклонилось от указанной целевой траектории.
В данном случае считают, что оба вышеупомянутых условия проверяются, если значение этой булевой переменной VB1 является истинным значением VRAI.
Этот первый подэтап Е1 в основном обеспечивает функцию безопасности. Действительно, на этапе b) поправочный крутящий момент TC определяют таким образом, чтобы вернуть автотранспортное средство вдоль указанной целевой траектории или удерживать его вдоль этой траектории, но не для того, чтобы отклонить автотранспортное средство от этой целевой траектории. Именно в основном в случае ошибки в осуществлении этапа b) этот подэтап Е1 привел бы к аннулированию базового фильтрованного поправочного крутящего момента (и, следовательно, фильтрованного поправочного крутящего момента TCF).
В ходе следующего, факультативного этапа Е2 проверяют, что:
- автотранспортное средство находится с внутренней стороны виража указанной полосы движения,
- абсолютное значение ⎟ТА⎜ прикладываемого водителем крутящего момента превышает заданный предельный крутящий момент ТАСТ, и
- поправочный крутящий момент TC может стремиться (если его прикладывают к органу рулевого управления транспортного средства) направить автотранспортное средство к центру указанной полосы движения.
Если абсолютное значение ⎟ТА⎜ превышает этот предельный крутящий момент ТАСТ, это значит, что водитель действует на рулевое колесо этого транспортного средства, то есть действительно прикладывает к нему чувствительный (существенный) крутящий момент.
Если эти три условия соблюдены, аннулируют базовый фильтрованный поправочный крутящий момент (подэтап Е2'). Можно напомнить, что это также приводит к аннулированию фильтрованного поправочного крутящего момента TCF, прикладываемого к органу рулевого управления автотранспортного средства.
В противном случае этот способ продолжается следующим подэтапом Е3.
В частности, во время этого подэтапа Е2, чтобы убедиться, что оба описанных выше условия проверяются, вычисляют следующее значение булевой переменной VB2:
(sign (yLini) = sign(R) & (⎟TC⎜ ≥ TACT) & (sign(TC) = sign(R))
где R является радиусом кривизны участка полосы движения, занимаемой автотранспортным средством, находящегося перед этим транспортным средством, который, как мы уже знаем, был определен на предыдущем этапе а).
В данном случае считают, что все три вышеупомянутых условия, проверяемые на подэтапе Е2, соблюдены, если значение этой булевой переменной VB2 является истинным значением VRAI.
Такое аннулирование фильтрованного поправочного крутящего момента, когда эти три условия проверяются, позволяет водителю автотранспортного средства легче направлять это транспортное средство вдоль траектории, проходящей с внутренней стороны этого виража (пересекая вираж), то есть направлять это транспортное средство вдоль этой траектории, не преодолевая фильтрованный поправочный крутящий момент, которым может действовать привод на орган OD рулевого управления этого транспортного средства.
В варианте во время этого подэтапа Е2 базовый фильтрованный поправочный крутящий момент можно аннулировать, как только соблюдены два первых из этих трех условий.
В ходе следующего подэтапа Е3 проверяют, действительно ли водитель автотранспортного средства действует на рулевое колесо этого транспортного средства, то есть действительно ли он прикладывает к нему (существенный) крутящий момент.
Для этого в данном случае проверяют, превышает ли абсолютное значение ⎟ТА⎜ указанного прикладываемого крутящего момента указанный предельный крутящий момент ТАСТ, или оно меньше этого предельного крутящего момента.
Если определено, что водитель автотранспортного средства действительно действует на рулевое колесо этого транспортного средства, этот способ продолжается следующим подэтапом Е4.
Если, наоборот, определяют, что этот водитель не действует или лишь незначительно действует на рулевое колесо, этот способ продолжается подэтапом Е3', в ходе которого определяют базовый фильтрованный поправочный крутящий момент следующим образом:
- если абсолютное значение ⎟TC⎜ поправочного крутящего момента меньше заданного порога безопасности TMAX, базовый фильтрованный поправочный крутящий момент равен указанному поправочному крутящему моменту ТС, и
- если абсолютное значение ⎟TC⎜ поправочного крутящего момента больше этого порога безопасности TMAX, базовый фильтрованный поправочный крутящий момент имеет абсолютное значение, равное этому порогу безопасности TMAX.
В частности, когда водитель автотранспортного средства не действует или действует лишь незначительно на рулевое колесо этого транспортного средства, базовый фильтрованный поправочный крутящий момент определяют по следующей формуле (F3):
= sign(TC) . min (⎟TC⎜, TMAX) (F3)
Таким образом, когда водитель автотранспортного средства не действует или действует лишь незначительно на рулевое колесо этого транспортного средства, фильтрованный поправочный крутящий момент равен поправочному крутящему моменту ТС, который необходимо приложить к указанному органу рулевого управления, чтобы автотранспортное средство следовало по указанной целевой траектории, за исключением случая, когда этот поправочный крутящий момент имеет абсолютное значение, превышающее порог безопасности TMAX.
Этот признак позволяет обеспечивать, чтобы автотранспортное средство следовало по указанной целевой траектории или по крайней мере по траектории, близкой к этой целевой траектории, без вмешательства водителя или с его ограниченным вмешательством. Действительно, в этих условиях считают, что приложение к органу рулевого управления крутящего момента, противоположного крутящему моменту, прикладываемому водителем, не доставляет последнему неудобства.
Кроме того, такое ограничение абсолютного значения фильтрованного поправочного крутящего момента  позволяет обеспечить, чтобы абсолютное значение фильтрованного поправочного крутящего момента TCF, в конечном итоге прикладываемого к органу OD рулевого управления этого транспортного средства, оставалось ниже порога безопасности TMAX, что способствует плавному вождению этого автотранспортного средства, то есть вождению, при котором этим транспортным средством управляют плавно, без резких рывков.
позволяет обеспечить, чтобы абсолютное значение фильтрованного поправочного крутящего момента TCF, в конечном итоге прикладываемого к органу OD рулевого управления этого транспортного средства, оставалось ниже порога безопасности TMAX, что способствует плавному вождению этого автотранспортного средства, то есть вождению, при котором этим транспортным средством управляют плавно, без резких рывков.
Кроме того, такое ограничение абсолютного значения фильтрованного поправочного крутящего момента TCF позволяет обеспечить, чтобы водитель автотранспортного средства мог по желанию полностью противодействовать этому фильтрованному поправочному крутящему моменту TCF (прикладываемому к органу рулевого управления транспортного средства). В частности, в данном случае значение этого порога безопасности TMAX выбирают таким образом, чтобы водитель автотранспортного средства был в состоянии приложить к органу рулевого управления транспортного средства прикладываемый крутящий момент ТА, превышающий этот порог безопасности TMAX.
Таким образом, это дает возможность водителю, если он этого желает, намеренно отклонить автотранспортное средство от указанной целевой траектории, что представляет интерес с точки зрения безопасности. Действительно, может возникнуть необходимость в отклонении водителем автотранспортного средства от указанной целевой траектории, например, чтобы избежать препятствия, неожиданно появившегося перед автотранспортным средством.
В ходе следующего подэтапа Е4 проверяют, что прикладываемый (водителем) крутящий момент ТА противодействует поправочному крутящему моменту TC, сравнивая знаки этих двух крутящих моментов.
В данном случае прикладываемый крутящий момент TА и поправочный крутящий момент TC имеют противоположные знаки, когда они противодействуют друг другу, то есть когда они соответствуют механическим действиям, прикладываемым в противоположных направлениях к органу OD рулевого управления транспортного средства.
Если прикладываемый крутящий момент ТА противодействует поправочному крутящему моменту TC, этот способ продолжается следующим подэтапом Е5.
Если же, наоборот, прикладываемый крутящий момент ТА имеет такой же знак, что и поправочный крутящий момент TC, этот способ продолжается описанным выше подэтапом Е3'.
В ходе следующего подэтапа Е5 проверяют, что боковое отклонение yL между автотранспортным средством и указанной целевой траекторией имеет абсолютное значение, превышающее определенный порог yLS.
Если абсолютное значение этого бокового отклонения yL меньше определенного порога yLS, это значит, что автотранспортное средство находится близко к указанной целевой траектории.
Если боковое отклонение yL между автотранспортным средством и указанной целевой траекторией имеет абсолютное значение, меньшее этого определенного порога yLS, способ продолжается подэтапом Е5', в ходе которого аннулируют базовый фильтрованный поправочный крутящий момент . Как было указано выше, это приводит также к аннулированию фильтрованного поправочного крутящего момента TCF, действующего на орган OD рулевого управления автотранспортного средства. Аннулирование фильтрованного поправочного крутящего момента TCF позволяет избежать противодействия этого фильтрованного поправочного крутящего момента TCF по отношению к крутящему моменту ТА, прикладываемому водителем, в ситуации, в которой коррекция при помощи этого фильтрованного поправочного крутящего момента TCF приносит мало пользы, поскольку автотранспортное средство уже находится близко к указанной целевой траектории.
Если же, наоборот, боковое отклонение yL между автотранспортным средством и указанной целевой траекторией имеет абсолютное значение, превышающее этот определенный порог yLS, способ продолжают подэтапом E5”, в ходе которого базовый фильтрованный поправочный крутящий момент определяют таким образом, чтобы он имел значение, которое может быть не равно нулю.
В частности, во время подэтапа Е5” базовый фильтрованный поправочный крутящий момент определяют таким образом, чтобы он имел не равное нулю значение, если боковое отклонение yL, кроме того, что превышает указанный определенный порог yLS, не уменьшается со скоростью изменения, превышающей заданную предельную скорость изменения. Фильтрованный поправочный крутящий момент TCF, который в конечном итоге будет приложен к органу OD рулевого управления этого автотранспортного средства, будет тоже иметь не равное нулю значение. Эту заданную предельную скорость изменения определяют в данном случае в зависимости от бокового отклонения yL. Эта скорость тем выше, чем больше боковое отклонение.
Таким образом, обеспечивают противодействие фильтрованного поправочного крутящего момента TCF по отношению к крутящему моменту ТА, прикладываемому водителем автотранспортного средства, когда автотранспортное средство явно отклонилось от указанной целевой траектории и, кроме того, не стремится быстро вернуться к этой целевой траектории.
Этот признак представляет интерес, поскольку в такой ситуации, даже если это может ощущаться водителем автотранспортного средства как неудобство, исключительно полезно и даже необходимо действовать на орган OD рулевого управления этого транспортного средства фильтрованным поправочным крутящим моментом TCF, близким к указанному поправочному крутящему моменту TC, чтобы избежать схода автотранспортного средства с дороги.
С другой стороны, если это боковое отклонение yL изменяется быстро, то есть, в частности, когда это боковое отклонение уменьшается со скоростью изменения, превышающей указанную заданную предельную скорость изменения, то в этом случае аннулируют базовый фильтрованный поправочный крутящий момент и, следовательно, также фильтрованный поправочный крутящий момент TCF.
Такое аннулирование фильтрованного поправочного крутящего момента TCF представляет интерес, когда это боковое отклонение yL уменьшается быстро, так как позволяет избежать противодействия фильтрованного поправочного крутящего момента TCF по отношению к крутящему моменту ТА, прикладываемому водителем, в ситуации, в которой коррекция при помощи этого фильтрованного поправочного крутящего момента TCF приносит мало пользы, поскольку автотранспортное средство быстро приближается к указанной целевой траектории.
В данном случае считается, что это боковое отклонение yL уменьшается быстро, то есть со скоростью изменения, превышающей заданную предельную скорость изменения, когда возвратная переменная EL, определенная как: EL = sign(yLini) . (K.yL + C.yL), где K и С являются первой и второй положительными константами, является отрицательной.
Если эта возвратная переменная EL является положительной, то считают, что боковое отклонение yL между автотранспортным средством и указанной целевой траекторией изменяется не быстро, то есть не уменьшается со скоростью изменения, превышающей вышеупомянутую заданную предельную скорость изменения.
Чтобы показать, как изменяется знак этой возвратной переменной EL, в качестве примера рассмотрим ситуацию, в которой первоначальное боковое отклонение yLini является положительным и в которой боковое отклонение yL тоже является положительным.
В этой ситуации, если боковая скорость  является положительной, автотранспортное средство, которое уже отклонилось от указанной целевой траектории, отклоняется от нее еще больше. В этом случае возвратная переменная EL является положительной.
является положительной, автотранспортное средство, которое уже отклонилось от указанной целевой траектории, отклоняется от нее еще больше. В этом случае возвратная переменная EL является положительной.
В этой же ситуации, когда боковая скорость является отрицательной, автотранспортное средство приближается к этой целевой траектории, поэтому боковое отклонение yL уменьшается в течение времени (в целом, в течение времени уменьшается абсолютное значение бокового отклонения). Если эта боковая скорость является не только отрицательной, но к тому же имеет абсолютное значение, превышающее величину  , считают, что это боковое отклонение уменьшается быстро со скоростью изменения
, считают, что это боковое отклонение уменьшается быстро со скоростью изменения  , превышающей заданную предельную скорость изменения (в данном случае равную ). Следует отметить, что в этом случае возвратная переменная EL является отрицательной.
, превышающей заданную предельную скорость изменения (в данном случае равную ). Следует отметить, что в этом случае возвратная переменная EL является отрицательной.
В этой же ситуации, когда боковая скорость является отрицательной, но имеет абсолютное значение, меньшее величины , считают, что боковое отклонение уменьшается, но медленно. Следует отметить, что в этом случае возвратная переменная EL является положительной.
Таким образом, в ходе подэтапа Е5”:
- если возвратная переменная EL является отрицательной, аннулируют базовый фильтрованный поправочный крутящий момент (можно напомнить, что следствием этого является аннулирование фильтрованного поправочного крутящего момента TCF, который в конечном итоге будет действовать на орган OD рулевого управления этого автотранспортного средства), и
- если возвратная переменная EL является положительной, определяют базовый фильтрованный поправочный крутящий момент таким образом, чтобы он имел не равное нулю значение.
В данном случае, если боковое отклонение yL не только превышает определенный порог yLS, но также не уменьшается быстро (EL>0), указанное не равное нулю значение базового фильтрованного поправочного крутящего момента определяют таким образом, чтобы оно:
- было равно поправочному крутящему моменту TC, когда абсолютное значение указанного поправочного крутящего момента TC меньше предельного возвратного крутящего момента TR, и
- имело абсолютное значение ⎟⎜, равное указанному предельному возвратному крутящему моменту TR, когда абсолютное значение поправочного крутящего момента TC превышает или равно предельному возвратному крутящему моменту TR.
В данном случае этот предельный возвратный крутящий момент TR является положительным и тем большим, чем больше боковое отклонение уL. Кроме того, этот предельный возвратный крутящий момент TR тем больше, чем быстрее увеличивается это боковое отклонение yL.
Таким образом, когда боковое отклонение yL превышает определенный порог yLS и не уменьшается быстро (EL>0), фильтрованному поправочному крутящему моменту TCF позволяют противодействовать крутящему моменту ТА, прикладываемому водителем автотранспортного средства, тем более что это автотранспортное средство удалилось от указанной целевой траектории или быстро от нее удаляется.
Этот последний признак позволяет в такой ситуации найти оптимальный компромисс между комфортом вождения для водителя автотранспортного средства и необходимостью вернуть это транспортное средство к целевой траектории, когда это транспортное средство удалилось от указанной целевой траектории (или быстро от нее удаляется).
В данном случае, в частности, предельный возвратный крутящий момент TR тем больше, чем больше возвратная переменная EL.
Например, в данном случае предельный возвратный крутящий момент определяют в зависимости от этой возвратной переменной EL, как показано на фиг. 3. На этой фигуре схематично на оси ординат показан предельный возвратный крутящий момент TR в зависимости от показанной на оси абсцисс возвратной переменной EL.
Здесь видно, что, когда возвратная переменная EL является отрицательной, предельный возвратный крутящий момент TR равен 0.
Когда возвратная переменная EL является положительной и меньше предельного значения ELS, предельный возвратный крутящий момент TR увеличивается пропорционально этой возвратной переменной EL и, если возвратная переменная EL равна этому предельному значению ELS, он достигает максимального возвратного крутящего момента TRMAX.
В варианте вместо линейного возрастания вместе с возвратной переменной EL предельный возвратный крутящий момент TR может увеличиваться, например, квадратично вместе с возвратной переменной EL до максимального возвратного крутящего момента TRMAX или возрастать непрерывно любым образом вместе с возвратной переменной EL до максимального возвратного крутящего момента TRMAX.
Когда возвратная переменная EL превышает это предельное значение ELS, предельный возвратный крутящий момент TR остается равным этому максимальному возвратному крутящему моменту TRMAX.
Значение предельного возвратного крутящего момента TR ограничено значением этого максимального возвратного крутящего момента TRMAX, чтобы ограничивать значение базового фильтрованного поправочного крутящего момента и, следовательно, фильтрованного поправочного крутящего момента TCF в целях обеспечения безопасности, что можно сравнить с ограничением базового фильтрованного поправочного крутящего момента , осуществляемым во время описанного ранее подэтапа Е3'.
В частности, в данном случае этот максимальный возвратный крутящий момент TRMAX равен порогу безопасности TMAX, применяемому во время этого подэтапа E3'.
В варианте максимальный возвратный крутящий момент TRMAX может иметь значение, отличное от этого порога безопасности TMAX, применяемого во время этого подэтапа E3', и меньшее этого порога безопасности TMAX.
Поскольку предельный возвратный крутящий момент TR в данном случае является нулевым, когда возвратная переменная EL является отрицательной, совокупность описанных выше признаков, применяемых на подэтапе Е5”, можно применить, вычисляя базовый фильтрованный поправочный крутящий момент в ходе подэтапа Е5” по следующей формуле (F4):
= sign(TC) . min(⎟TC⎜, TR (yL, , yLini)) (F4)
Затем базовый фильтрованный поправочный крутящий момент , определенный в ходе описанной выше первой операции этапа d), фильтруют, как было указано выше, во время второй операции (блок В22), которую содержит в данном случае этап d).
В ходе этой второй операции определяют фильтрованный поправочный крутящий момент TCF, фильтруя определенный ранее базовый фильтрованный поправочный крутящий момент , как было указано выше.
Пока абсолютное значение  скорости изменения базового фильтрованного поправочного крутящего момента остается ниже максимальной скорости изменения txmax, фильтрованный поправочный крутящий момент TCF равен базовому фильтрованному поправочному крутящему моменту .
скорости изменения базового фильтрованного поправочного крутящего момента остается ниже максимальной скорости изменения txmax, фильтрованный поправочный крутящий момент TCF равен базовому фильтрованному поправочному крутящему моменту .
Если абсолютное значение скорости изменения базового фильтрованного поправочного крутящего момента становится выше этой максимальной скорости изменения txmax, фильтрованный поправочный крутящий момент TCF определяют таким образом, чтобы он быстрее стремился к базовому фильтрованному поправочному крутящему моменту , но имел при этом скорость изменения  , абсолютное значение которой остается ниже этой максимальной скорости изменения txmax, то есть чтобы он имел скорость изменения , равную этой максимальной скорости изменения txmax, когда скорость изменения базового фильтрованного поправочного крутящего момента является положительной, и равную противоположному значению - tmax максимальной скорости изменения txmax, когда скорость изменения базового фильтрованного поправочного крутящего момента является отрицательной.
, абсолютное значение которой остается ниже этой максимальной скорости изменения txmax, то есть чтобы он имел скорость изменения , равную этой максимальной скорости изменения txmax, когда скорость изменения базового фильтрованного поправочного крутящего момента является положительной, и равную противоположному значению - tmax максимальной скорости изменения txmax, когда скорость изменения базового фильтрованного поправочного крутящего момента является отрицательной.
Эта вторая операция (блок В22) этапа d) обеспечивает, чтобы фильтрованный поправочный крутящий момент TCF, в конечном итоге действующий на орган OD рулевого управления автотранспортного средства, менялся постепенно в течение времени, без резкого изменения, что увеличивает комфорт для водителя этого транспортного средства.
В варианте, в ходе этой второй операции фильтрованный поправочный крутящий момент TCF можно также определить таким образом, чтобы он имел абсолютное значение, остающееся меньшим другого заданного порога безопасности, В рамках этого варианта можно отказаться от порогов безопасности, применяемых соответственно на подэтапах E3' и E5” (в данном случае порога безопасности TMAX и максимального возвратного крутящего момента TRMAX), поскольку роль этих порогов безопасности выполнена во время второй операции этапа d).
Описанный выше способ содействия управлению позволяет автоматически корректировать траекторию, по которой следует автотранспортное средство, чтобы она следовала указанной целевой траектории. Кроме того, этот способ позволяет согласовать эту автоматическую коррекцию с действиями, осуществляемыми водителем этого транспортного средства на рулевом колесе, причем гармонично, комфортно для водителя и безопасно.
Сглаживание (и даже аннулирование) этой автоматической коррекции, когда она противодействует действиям, производимым водителем этого транспортного средства на рулевом колесе, можно поправлять путем регулирования различных порогов, констант и предельных или максимальных величин, используемых во время осуществления этого способа содействия управлению.
Например, регулируя вторую константу С по более высокому значению, добиваются аннулирования этой автоматической коррекции, когда она противодействует крутящему моменту ТА, прикладываемому водителем, и когда боковое отклонение yL автотранспортного средства относительно целевой траектории уменьшается, причем даже если это боковое отклонение yL уменьшается медленно.
Фильтрованный поправочный крутящий момент TCF может противодействовать прикладываемому водителем крутящему моменту ТА тем сильнее, чем больше значения первой и второй констант K и С.
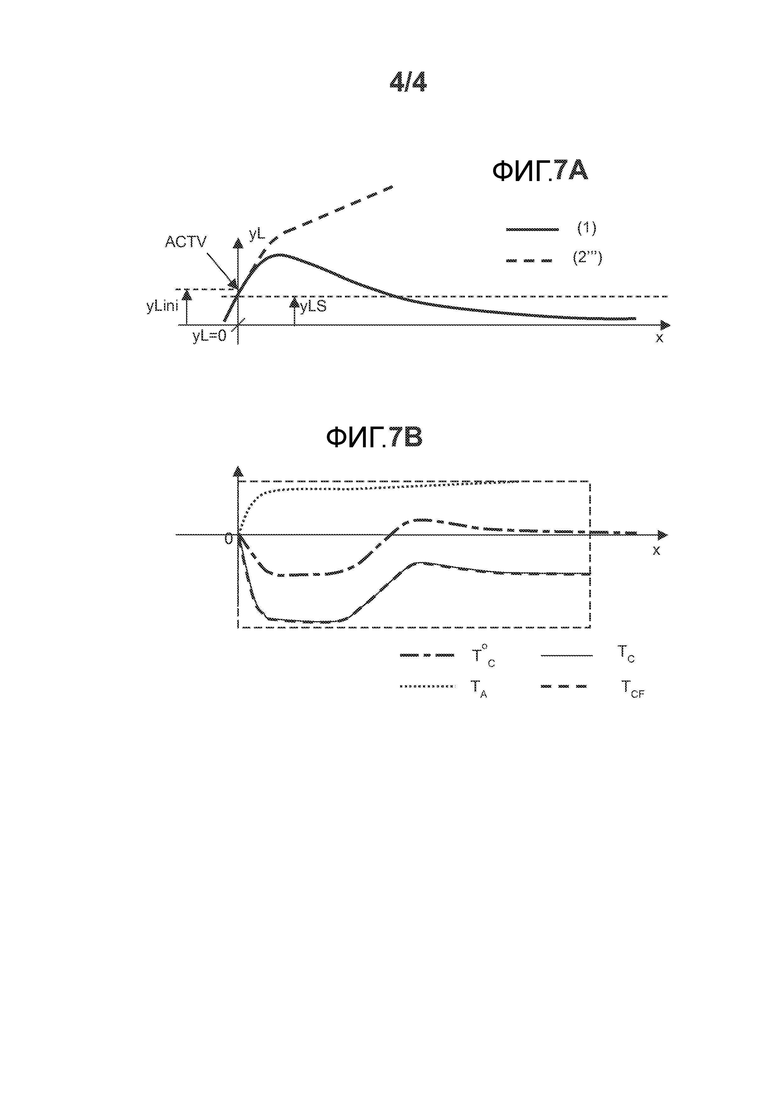
На фиг. 4А-7В представлено несколько разных ситуаций, в которых поправочный крутящий момент TC противодействует крутящему моменту ТА, прикладываемому водителем автотранспортного средства, и в которых фильтрованный поправочный крутящий момент TCF либо аннулируют, либо определяют таким образом, чтобы он имел не равное нулю значение.
На этих фигурах в качестве иллюстрации показаны различные величины, которые могут быть считаны или определены в ходе описанного выше способа содействия управлению, для примера пути автотранспортного средства. Каждый из четырех крутящих моментов, показанных на фиг. 4А и 4В, 5А и 5В, 6А и 6В и 7А и 7В, соответствуют разному типу реакции водителя этого транспортного средства.
Этот пример пути автотранспортного средства соответствует пути на полосе движения по прямой линии. Указанная целевая траектория соответствует в данном случае центру этой полосы движения и, следовательно, является прямолинейной.
Автотранспортное средство отмечено вдоль этой полосы движения продольным положением х, соответствующим положению этого транспортного средства вдоль продольной оси, параллельной относительно этой целевой траектории.
Можно напомнить, что, когда автотранспортное средство следует по указанной целевой траектории, боковое отклонение yL является нулевым (yL=0).
На фиг. 4А, 5А, 6А и 7А на оси ординат показанная сплошной линией кривая (1) отображает боковое отклонение yL автотранспортного средства в зависимости от показанного на оси абсцисс продольного положения х этого транспортного средства, когда прикладываемый (водителем) крутящий момент ТА является нулевым. В этом случае крутящий момент, которым вышеупомянутый привод действует на орган OD рулевого управления этого транспортного средства, непосредственно соответствует управляющему крутящему моменту .
На всех фиг. 4А-7В автотранспортное средство изначально отклоняется от целевой траектории. Как можно заметить на каждой из фиг. 4А, 5А, 6А и 7А, боковое отклонение yL сначала начинает увеличиваться.
В ответ на отклонение автотранспортного средства от этой целевой траектории включается усиление управления, то есть привод начинает действовать крутящим моментом на орган рулевого управления транспортного средства, чтобы привести последнее ближе к целевой траектории. Это включение обозначено на фиг. 4А, 5А, 6А и 7А указанием ACTV.
Как можно отметить на фиг. 4А, 5А, 6А и 7А, после этого включения автотранспортное средство реально приближается к указанной целевой траектории, чтобы оказаться к ней ближе.
На фиг. 4А, 5А, 6А и 7А показанные штриховой линией кривые (2), (2'), (2”) и (2’”) отображают, каждая, боковое отклонение yL автотранспортного средства в зависимости от продольного положения х этого транспортного средства, если на орган OD рулевого управления этого транспортного средства действует только водитель, то есть если вышеупомянутый привод не действует на этот орган рулевого управления.
Фиг. 4А соответствует случаю, в котором водитель автотранспортного средства, когда только он действует на орган OD рулевого управления транспортного средства, стремится вернуть это транспортное средство к целевой траектории, причем медленнее, чем когда управление транспортным средством происходит полностью автоматически, то есть когда на этот орган рулевого управления действует только вышеупомянутый привод, управляемый согласно описанному выше способу.
Фиг. 5А соответствует случаю, в котором водитель автотранспортного средства, когда только он действует на орган OD рулевого управления транспортного средства, стремится вернуть это транспортное средство к целевой траектории, причем быстрее, чем когда управление транспортным средством происходит полностью автоматически, то есть когда на этот орган рулевого управления действует только вышеупомянутый привод, управляемый согласно описанному выше способу.
Фиг. 6А соответствует случаю, в котором водитель автотранспортного средства, когда только он действует на орган OD рулевого управления транспортного средства в результате первоначального отклонения, корректирует направление перемещения этого транспортного средства, чтобы оно перестало удаляться от целевой траектории, но не возвращая при этом транспортное средство к целевой траектории. Иначе говоря, при этом отклонении водитель транспортного средства стабилизирует боковое отклонение yL транспортного средства относительно указанной целевой траектории в не равном нулю значении, в данном случае превышающем значение определенного порога yLS.
Фиг. 7А соответствует случаю, в котором водитель автотранспортного средства, когда только он действует на орган OD рулевого управления транспортного средства, направляет последнее за пределы полосы движения, занимаемой этим транспортным средством.
На каждой из фиг. 4В, 5В, В, и 7В в зависимости от продольного положения х автотранспортного средства штрих-пунктирной линией показан управляющий крутящий момент , которым действует вышеупомянутый привод непосредственно на орган OD рулевого управления автотранспортного средства, когда водитель не действует на этот орган рулевого управления (то есть когда прикладываемый крутящий момент ТА является нулевым), и под действием которого это транспортное средство следует по траектории, соответствующей кривой (1) на фиг. 4А, 5А, 6А и 7А.
На фиг. 4В, 5В, В, и 7В пунктирной линией в зависимости от продольного положения х транспортного средства показан крутящий момент ТА, прикладываемый водителем автотранспортного средства, когда только он один действует на орган OD рулевого управления этого транспортного средства, чтобы оно следовало по траектории, соответствующей соответственно кривой (2) на фиг. 4А, кривой (2') на фиг. 5А, кривой (2”) на фиг. 6А и кривой (2’”) на фиг. 7А.
На каждой из фиг. 4В, 5В, В, и 7В сплошной линий и тоже в зависимости от продольного положения х транспортного средства показан поправочный крутящий момент ТС в случае, когда активными являются одновременно водитель и система содействия управлению. Можно напомнить, что поправочный крутящий момент ТС равен разности между управляющим крутящим моментом (показанным штрих-пунктирной линией) и прикладываемым крутящим моментом ТА (показанным пунктирной линией), в данном случае крутящим моментом, прикладываемым водителем, чтобы автотранспортное средство следовало по траектории, соответствующей соответственно кривым (2), (2'), (2”) и (2’”) на фиг. 4А, 5А, 6А и 7А.
На каждой из фиг. 4В, 5В, 6В и 7В штриховой линией в зависимости от продольного положения х автотранспортного средства показан также фильтрованный поправочный крутящий момент TCF, вычисленный на основании этого поправочного крутящего момента ТС.
Для четырех типов реакции водителя автотранспортного средства, соответствующих крутящим моментам на фиг. 4А и 4В, 5А и 5В, 6А и 6В и 7А и 7В, можно отметить, что поправочный крутящий момент ТС иногда противодействует прикладываемому крутящему моменту ТА. Ситуации, в которых поправочный крутящий момент ТС противодействует прикладываемому крутящему моменту ТА, отмечены на фиг. 4ВА, 5В, 6В и 7В в виде штрихового прямоугольника.
В случае, представленном на фиг. 4В, ситуация, в которой поправочный крутящий момент ТС противодействует прикладываемому водителем крутящему моменту ТА, является ситуацией, в которой автотранспортное средство находится вблизи целевой траектории, то есть в данном случае ситуацией, в которой боковое отклонение yL транспортного средства меньше определенного порога yLS. В соответствии с описанным выше способом фильтрованный поправочный крутящий момент TCF аннулируется, что видно на этой фигуре.
В случае, представленном на фиг. 5В, ситуация, в которой поправочный крутящий момент ТС противодействует прикладываемому водителем крутящему моменту ТА, является ситуацией, в которой автотранспортное средство удалено от целевой траектории (то есть в данном случае ситуацией, в которой боковое отклонение yL транспортного средства больше определенного порога yLS), но в которой это боковое отклонение yL быстро уменьшается.. В соответствии с описанным выше способом фильтрованный поправочный крутящий момент TCF аннулируется, что видно на этой фигуре.
В случае, представленном на фиг. 6В, различают две последовательные ситуации, в которых поправочный крутящий момент ТС противодействует прикладываемому водителем крутящему моменту ТА. В первой из этих двух ситуаций боковое отклонение yL автотранспортного средства относительно целевой траектории превышает определенный порог yLS, но быстро уменьшается, тогда как во второй из этих двух ситуаций боковое отклонение yL автотранспортного средства относительно целевой траектории превышает определенный порог yLS и остается постоянным. В соответствии с описанным выше способом в первой из этих двух ситуаций фильтрованный поправочный крутящий момент TCF аннулируют, затем во второй из этих двух ситуаций фильтрованный поправочный крутящий момент TCF определяют таким образом, чтобы он имел не равное нулю значение, в данном случае равное поправочному крутящему моменту ТС. На этой фигуре, после того как значение фильтрованного поправочного крутящего момента TCF достигает значения поправочного крутящего момента TC, соответствующие кривые к тому же накладываются друг на друга (и больше практически не отличаются друг от друга).
В случае на фиг. 7В, хотя поправочный крутящий момент ТС постоянно противодействует прикладываемому крутящему моменту ТА, фильтрованный поправочный крутящий момент TCF определяют таким образом, чтобы он имел не равное нулю значение, в данном случае равное поправочному крутящему моменту ТС. Действительно, в случае, представленном на фиг. 7В, боковое отклонение yL между автотранспортным средством и целевой траекторией превышает определенный порог yLS и, более того, увеличивается (быстро) с течением времени.
Изобретение относится к общей области способов содействия управлению автотранспортными средствами. Способ содействия управлению автотранспортным средством, занимающим полосу движения, в ходе которого в зависимости от элемента данных (yL), относящегося к положению автотранспортного средства относительно полосы движения, определяют поправочный крутящий момент (TC) для воздействия на орган рулевого управления автотранспортного средства с учетом прикладываемого крутящего момента (ТА), которым действует водитель автотранспортного средства, чтобы автотранспортное средство следовало по целевой траектории. Дополнительно определяется фильтрованный поправочный крутящий момент (TCF) в зависимости от указанного поправочного крутящего момента так, чтобы этот фильтрованный поправочный крутящий момент систематически имел меньшее значение по сравнению с этим поправочным крутящим моментом, когда указанный (ТА) по существу противодействует указанному (TCF). Причем, если указанный (ТА) по существу противодействует (TC) и указанное боковое отклонение (yL) меньше определенного порога (yLS), фильтрованный поправочный крутящий момент (TCF) аннулируют. Затем указанный (TCF) прикладывается к органу рулевого управления автотранспортного средства. Повышается безопасность при эксплуатации ТС. 8 з.п. ф-лы, 11 ил.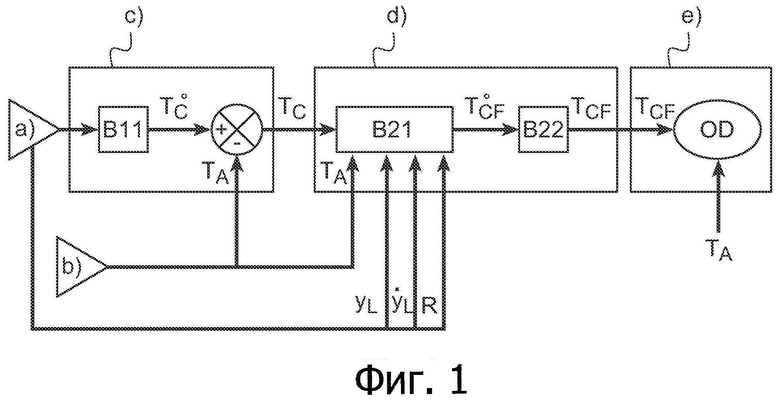
1. Способ содействия управлению автотранспортным средством, занимающим полосу движения, содержащий этапы, на которых:
а) считывают по меньшей мере один элемент данных (yL), относящийся к положению автотранспортного средства относительно полосы движения, при этом указанный элемент данных содержит боковое отклонение (yL) между автотранспортным средством и указанной целевой траекторией,
b) считывают прикладываемый крутящий момент (ТА), которым водитель автотранспортного средства действует на орган (OD) рулевого управления автотранспортного средства,
с) в зависимости от указанного элемента данных (yL) определяют поправочный крутящий момент (TC) для воздействия на указанный орган (OD) рулевого управления с учетом указанного прикладываемого крутящего момента (ТА), чтобы автотранспортное средство следовало по целевой траектории,
отличающийся тем, что дополнительно содержит этапы, на которых:
d) определяют фильтрованный поправочный крутящий момент (TCF) в зависимости от указанного поправочного крутящего момента (TC) таким образом, чтобы фильтрованный поправочный крутящий момент (TCF) систематически имел меньшее значение по сравнению с указанным поправочным крутящим моментом (TC), когда указанный прикладываемый крутящий момент (ТА) по существу противодействует указанному поправочному крутящему моменту (TC), причем, когда указанный прикладываемый крутящий момент (ТА) по существу противодействует указанному поправочному крутящему моменту (TC) и указанное боковое отклонение (yL) меньше определенного порога (yLS), фильтрованный поправочный крутящий момент (TCF) аннулируют, и
e) указанный фильтрованный поправочный крутящий момент (TCF) прикладывают к органу (OD) рулевого управления автотранспортного средства.
2. Способ по п. 1, в котором на этапе d), когда боковое отклонение (yL) превышает указанный определенный порог (yLS), фильтрованный поправочный крутящий момент (TCF) определяют таким образом, чтобы он имел не равное нулю значение.
3. Способ по п. 1, в котором на этапе d), когда боковое отклонение (yL) превышает указанный определенный порог (yLS), фильтрованный поправочный крутящий момент (TCF) определяют таким образом, чтобы он имел не равное нулю значение при условии, что указанное боковое отклонение (yL) не уменьшается со скоростью изменения, превышающей заданную предельную скорость изменения, а в противном случае ему задают нулевое значение.
4. Способ по п. 3, в котором указанную заданную предельную скорость изменения определяют в зависимости от значения указанного бокового отклонения (yL).
5. Способ по п. 2 или 4, в котором на этапе d), когда боковое отклонение (yL) превышает указанный определенный порог (yLS), фильтрованный поправочный крутящий момент (TCF) определяют таким образом, чтобы он имел не равное нулю значение:
- которое равно указанному поправочному крутящему моменту (TC), если абсолютное значение указанного поправочного крутящего момента (TC) меньше предельного возвратного крутящего момента (TR), и
- которое имеет абсолютное значение, равное указанному предельному возвратному крутящему моменту (TR), если абсолютное значение поправочного крутящего момента (TC) превышает или равно указанному предельному возвратному крутящему моменту (TR).
6. Способ по п. 5, в котором предельный возвратный крутящий момент (TR) является положительным и увеличивается с увеличением указанного бокового отклонения (yL).
7. Способ по п. 5 или 6, в котором предельный возвратный крутящий момент (TR) является положительным и тем большим, чем быстрее увеличивается указанное боковое отклонение (yL).
8. Способ по одному из пп. 1-7, в котором на этапе d), когда указанный прикладываемый водителем крутящий момент (ТА) и указанный поправочный крутящий момент (TC) имеют одинаковый знак, указанный фильтрованный поправочный крутящий момент (TCF) определяют таким образом, чтобы:
- фильтрованный поправочный крутящий момент (TCF) был равен указанному поправочному крутящему моменту (TC), если абсолютное значение указанного поправочного крутящего момента (TC) меньше заданного порога безопасности (ТМАХ), и
- фильтрованный поправочный крутящий момент (TCF) имел абсолютное значение, равное указанному порогу безопасности (ТМАХ), если абсолютное значение поправочного крутящего момента (TC) превышает указанный порог безопасности (ТМАХ).
9. Способ по одному из пп. 1-8, в котором аннулируют фильтрованный поправочный крутящий момент (TCF) на этапе d), если
- автотранспортное средство находится с внутренней стороны виража указанной полосы движения и
- абсолютное значение прикладываемого водителем крутящего момента (ТА) превышает предельный крутящий момент (ТАСТ).
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 6778890 B2, 24.04.2003 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 1999 |
|
RU2158692C2 |

