Область техники
Настоящее изобретение относится к устройству выбора режима парковки, которое отображает изображение окружающей среды вокруг транспортного средства водителю, для того чтобы побудить водителя выбрать режим парковки транспортного средства, и способу для этого.
Уровень техники
Традиционно, было разработано устройство содействия парковке для парковки транспортного средства в целевом положении парковки. Такое устройство содействия парковке предшествующего уровня техники раскрыто в Патентной литературе 1, перечисленной ниже по тексту.
В устройстве содействия парковке, раскрытом в Патентной литературе 1, многочисленные целевые положения парковки временно устанавливаются вместе с режимами парковки (параллельной парковкой, перпендикулярной парковкой и т.д.) в состоянии, где транспортное средство останавливается в заданном положении остановки. Затем, целевое положение парковки, в котором водитель намеревается осуществить парковку, выбирается из числа временно установленных многочисленных положений парковки на основании операции рулевого управления водителя. Более точно, когда рулевое колесо подвергается рулевому управлению влево на больший чем или равный предопределенному угол, а затем транспортное средство перемещается, выбирается правосторонняя перпендикулярная парковка (движение передним ходом налево, а затем, движение задним ходом для парковки перпендикулярно на правой стороне). В качестве альтернативы, когда рулевое колесо подвергается рулевому управлению вправо на больший чем или равный предопределенному угол, а затем транспортное средство перемещается, выбирается левосторонняя перпендикулярная парковка (движение передним ходом направо, а затем, движение задним ходом для парковки перпендикулярно на левой стороне). В качестве альтернативы, когда транспортное средство перемещается без управления рулевым колесом на больший чем или равный предопределенному угол, выбирается левосторонняя параллельная парковка (движение передним ходом с меньшим углом поворота, а затем, движение задним ходом для параллельной парковки). В таком случае, содействие парковке запускается на основании выбранного целевого положения парковки (режима парковки).
Список цитат
Патентная литература 1: Нерассмотренная Японская патентная публикация № 2008-201363.
Сущность изобретения
Однако для того чтобы припарковаться на правой стороне, в вышеупомянутом устройстве содействия парковке необходимо выбрать целевое положение парковки посредством управления рулевым колесом противоположно влево. Поэтому, сторона для парковки и сторона для действия противоположны, так что она является сбивающей с толку операцией для водителя, который незнаком с вождением автомобиля.
Цель настоящего изобретения обеспечивает устройство выбора режима парковки, посредством которого целевое положение парковки может легко устанавливаться и которое может улучшать удобство и простоту использования, и способ для этого.
Первый аспект настоящего изобретения обеспечивает устройство выбора режима парковки для выбора одного режима парковки из множества режимов парковки, включающих в себя по меньшей мере перпендикулярную парковку или параллельную парковку, устройство включает в себя блок регистрации угла поворота (средство регистрации угла поворота), который регистрирует угол поворота рулевого колеса; блок регистрации операции (средство регистрации операции), который регистрирует, на основании угла поворота, зарегистрированного блоком регистрации угла поворота, предопределенную операцию, в которой рулевое колесо возвращается в нейтральное положение после поворота вправо или влево; и блок выбора режима парковки (средство выбора режима парковки), который выбирает, когда предопределенная операция зарегистрирована блоком регистрации операции, режим парковки, который соответствует направлению управления рулем вправо или влево угла поворота, зарегистрированного блоком регистрации угла поворота, и ассоциативно связан с упомянутым углом поворота. Отметим, что величина управления рулем и направление управления рулем могут узнаваться из зарегистрированного угла поворота.
Второй аспект настоящего изобретения обеспечивает способ выбора режима парковки для выбора одного режима парковки из множества режимов парковки, включающих в себя по меньшей мере перпендикулярную парковку или параллельную парковку, причем способ содержит регистрацию угла поворота рулевого колеса; регистрацию, на основании зарегистрированного угла поворота, предопределенной операции, в которой рулевое колесо возвращается в нейтральное положение после поворота вправо или влево; и выбор, когда зарегистрирована предопределенная операция, режима парковки, который соответствует направлению управления рулем вправо или влево зарегистрированного угла поворота и ассоциативно связан с упомянутым углом поворота.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - принципиальная схема, показывающая конфигурацию устройства выбора режима парковки согласно первому варианту осуществления.
Фиг. 2 - вид в перспективе, показывающий пример компоновки камер.
Фиг. 3 - графическое изображение, показывающее пример отображаемого экрана устройства отображения.
Фиг. 4 - блок-схема последовательности операций способа, показывающая процесс содействия парковке.
Фиг. 5 - виды сверху для пояснения режимов парковки целевых положений парковки, (a) показывает левостороннюю перпендикулярную парковку, (b) показывает левостороннюю параллельную парковку и (c) показывает парковку под углом.
Фиг. 6 - блок-схема последовательности операций способа, показывающая процесс выбора режима парковки.
Фиг. 7 - графическое изображение для пояснения соответствия между углами поворота и отображаемыми экранами (режимами парковки).
Фиг. 8 - графическое изображение для пояснения еще одного соответствия между углами поворота и отображаемыми экранами (режимами парковки).
Фиг. 9 - график, показывающий зависимость угла поворота и времени.
Фиг. 10 - графическое изображение, показывающее пример отображаемого экрана.
Фиг. 11 - принципиальная схема, показывающая конфигурацию устройства выбора режима парковки согласно второму варианту осуществления.
Фиг. 12(a) - вид спереди, показывающий угол поворота рулевого колеса, и (b) - график, показывающий зависимость угла поворота и реактивного крутящего момента.
Фиг. 13 - блок-схема последовательности операций способа, показывающая процесс вычисления значения крутящего момента.
Фиг. 14 - блок-схема последовательности операций способа, показывающая процесс сохранения максимального значения крутящего момента.
Фиг. 15 - график, показывающий зависимость угла поворота и реактивного крутящего момента в устройстве выбора режима парковки согласно третьему варианту осуществления.
Фиг. 16 - блок-схема последовательности операций способа, показывающая процесс вычисления значения крутящего момента.
Фиг. 17(a) - вид спереди, показывающий угол поворота рулевого колеса и целевые положения управления, и (b) - график, показывающий зависимость угла поворота и реактивного крутящего момента в устройстве выбора режима парковки в устройстве выбора режима парковки согласно четвертому варианту осуществления.
Фиг. 18 - блок-схема последовательности операций способа, показывающая процесс вычисления значения крутящего момента.
Фиг. 19 - блок-схема последовательности операций способа, показывающая процесс выбора режима парковки устройством выбора режима парковки согласно пятому варианту осуществления.
Фиг. 20 - графическое изображение для пояснения соответствия между углами поворота и отображаемыми экранами (режимами парковки).
Фиг. 21 - график для пояснения зависимости угла поворота и угла парковочной рамки.
Фиг. 22 - график для пояснения еще одной зависимости угла поворота и угла парковочной рамки.
Фиг. 23 - графическое изображение для пояснения способа для подробного отображения экранов.
Фиг. 24 - график, показывающий зависимость угла поворота и времени.
Фиг. 25 - вид спереди, показывающий диапазоны и пороговые значения установки режима парковки в устройстве выбора режима парковки согласно шестому варианту осуществления.
Фиг. 26 - график, показывающий гистерезис между углом поворота и установкой режима парковки.
Фиг. 27 - блок-схема последовательности операций способа, показывающая процесс установки и фиксации режима парковки.
Фиг. 28 - график, показывающий зависимость угла поворота и времени.
Фиг. 29 - блок-схема последовательности операций способа, показывающая процесс установки и фиксации режима парковки в устройстве выбора режима парковки согласно седьмому варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Варианты осуществления будут пояснены в дальнейшем со ссылкой на чертежи.
<Первый вариант осуществления>
[Конфигурация устройства выбора режима парковки]
Первый вариант осуществления будет пояснен со ссылкой на фиг. с 1 по 10.
Как показано на фиг. 1, устройство 1 выбора режима парковки включает в себя блок 2 обработки изображений, блок 3 наложения режима парковки, блок 4 выбора режима парковки (также служащий в качестве блока регистрации операции), блок 5 вычисления режима парковки и контроллер 9 парковочного маневра. Блок 2 обработки изображений преобразует киноизображение окружающей среды транспортного средства для генерирования киноизображения вида сверху. Блок 3 наложения режима парковки накладывает изображение, которое указывает режим парковки на киноизображении вида сверху окружающей среды транспортного средства. Блок 4 выбора режима парковки выбирает целевое положение парковки и режим парковки на основании операции рулевого управления водителя. Блок 5 вычисления режима парковки вычисляет траекторию парковки в целевое положение парковки. В дополнение, устройство 1 выбора режима парковки также соединено с камерами с 6a по 6d, устройством 7 отображения, датчиком 8 рулевого управления (блоком регистрации угла поворота) и блоком 10 парковочного маневра. Камеры с 6a по 6d снимают киноизображения окружающей среды транспортного средства, а затем, отправляют их в блок 2 обработки изображений. Устройство 7 отображения представляет изображение(я), такие как киноизображение вида сверху из блока 3 наложения режима парковки, пассажирам. Датчик 8 рулевого управления регистрирует направление операции и величину операции рулевого колеса, а затем, отправляет их в блок 4 выбора режима парковки. Блок 10 парковочного маневра, более точно, является электродвигателем EPS (рулевого управления с усилителем) и управляется контроллером 9 парковочного маневра при содействии парковке.
Устройство 1 выбора режима парковки достигается сохранением программы содействия парковке в ПЗУ (постоянном запоминающем устройстве, ROM) и выполнением программы с использованием ЦПУ (центрального процессорного устройства, CPU), а вышеупомянутые составляющие блоки сконфигурированы из ЦПУ, ПЗУ и т.д. Различные вычисления вычисляются в блоке управления содействием парковке. Информация, введенная в блок управления содействием парковке, например, включает в себя информацию диапазона переключений из блока управления AT/CVT (автоматической трансмиссией/бесступенчатой трансмиссией), информацию скорости вращения колес из блока управления ABS (антиблокировочной тормозной системой), информацию угла поворота из блока управления датчиком рулевого управления, информацию частоты вращения двигателя из ECM и т.д. В дополнение, информация, выдаваемая оттуда, например, включает в себя информацию экрана отображения в блок управления AVM (монитором кругового обзора), информацию команд автоматического рулевого управления в блок управления EPS, информацию команд для предупреждения, или тому подобного, в блок управления измерительными приборами и так далее. Входная и выходная информация передается соответствующим образом посредством связи через CAN (локальную сеть контроллеров), проводки по материальным проводам, или тому подобное, принимая во внимание возможность установки на транспортное средство, обеспечение надежности, или тому подобное.
Камеры с 6a по 6d снимают киноизображения, которые должны быть использованы в качестве интерфейса между устройством 1 выбора режима парковки и водителем. Фиг. 2 показывает пример компоновки камер с 6a по 6d. Как показано на фиг. 2, камера 6a скомпонована на передней решетке транспортного средства, камера 6d скомпонована возле заднего стекла, а камеры 6b и 6c скомпонованы на нижних участках правого и левого дверных зеркал. Посредством использования широкоугольных камер в качестве камер с 6a по 6d, более широкая зона может представляться водителю. Снятые киноизображения обрабатываются посредством преобразования точки обзора, а затем, киноизображение вида сверху из виртуальной точки 20 обзора отображается на устройстве 7 отображения, установленном в кабине транспортного средства. Отметим, что транспортное средство не ограничено легковым автомобилем, но может быть автомобилем для коммерческих перевозок или грузовым автомобилем. В дополнение, положения установки камер с 6a по 6d не ограничены компоновками на фиг. 2. Например, камеры могут быть установлены в четырех углах транспортного средства и могут быть установлены в крыше. Задняя камера может быть скомпонована на заднем бампере или возле ламп для номерного знака.
Блок 2 обработки изображений обрабатывает киноизображения, снятые камерами с 6a по 6d, посредством преобразования точки обзора и наложения для генерирования киноизображения вида сверху. Киноизображения, снятые камерами с 6a по 6d, являются киноизображениями, наблюдаемыми с наклонно верхних положений, но преобразованными в киноизображение, наблюдаемое с вертикально верхнего положения посредством преобразования точки обзора. Что касается такого преобразования точки обзора, может использоваться способ, раскрытый в «Development of Around View System, Proceedings of Society of Automotive Engineers of Japan, No. 116-07, (Oct. 2007), pp. 17-22, SUZUKI Masayasu, CHINOMI Satoshi, TAKANO Teruhisa» («Развитие систем кругового обзора, труды общества инженеров-автомобилистов Японии, № 116-07, (октябрь 2007 г.), стр. 17-22, СУЗУКИ Масайяшу, ЧИНОМИ Сатоши, ТАКАНО Терухиша»), или тому подобное.
Блок 3 наложения режима парковки накладывает изображение, которое указывает парковочную рамку (режим парковки) на киноизображение вида сверху, сгенерированное блоком 2 обработки изображений. Это наложение изображения может выполняться посредством использования способа наложения для компьютерной графики. В дополнение, он также управляет переключением изображения парковочной рамки на устройстве 7 отображения согласно режиму парковки, выбранному блоком 4 выбора режима парковки. Фиг. 3 показывает пример изображения, наложенного блоком 3 наложения режима парковки. Как показано на фиг. 3, киноизображение 31 вида сверху после преобразования точки обзора отображается на левой стороне на устройстве 7 отображения, и киноизображение, снятое камерами с 6a по 6d (на фиг. 2, киноизображение, снятое задней камерой 6d), отображается на правой стороне. В дополнение, изображение 33, которое указывает режим парковки, отображается в киноизображении вида сверху и используется для выбора целевого положения парковки.
Блок 4 выбора режима парковки переключает изображение, которое указывает режим парковки, на основании угла поворота, введенного с датчика 8 рулевого управления, и заранее установленного режима парковки, который выбран. Например, он переключает всего шесть режимов парковки, перпендикулярную парковку, параллельную парковку и парковку под углом, каждая на правой и левой сторонах. Режим парковки для целевого положения парковки выбирается и заранее устанавливается операцией рулевого управления водителя. Отметим, что, хотя выбор и предварительная установка режима парковки будет подробно пояснена позже, заранее установленный режим парковки фиксируется, когда водитель убирает его/ее ступню с тормозной педали, и содействие парковке начинается на основании зафиксированного режима парковки. Это может регистрироваться посредством тормозного переключателя, датчика тормозного давления или тому подобного, убирает или нет водитель его/ее ступню с тормозной педали.
Блок 5 вычисления режима парковки вычисляет траекторию парковки на основании режима парковки, зафиксированного в блоке 4 выбора режима парковки наряду с тем, что он подает по обратной связи значения, зарегистрированные датчиком 8 рулевого управления. Блок 5 вычисления режима парковки отправляет вычисленную траекторию парковки в блок 3 наложения режима парковки и управляет блоком 10 парковочного маневра через контроллер 9 парковочного маневра на основании вычисленной траектории парковки.
Устройство 7 отображения представляет киноизображения после наложения в блоке 3 наложения режима парковки водителю в качестве видимой информации. Например, устройство 7 отображения является монитором или монитором кругового обзора в автомобильной навигационной системе.
Блок 10 парковочного маневра (электродвигатель EPS) приводится в действие на основании команд управления из контроллера 9 парковочного маневра, чтобы осуществлять маневрирование транспортного средства в целевое положение парковки. Например, он приводит в действие ходовые колеса на основании команд управления для осуществления маневрирования транспортного средства в целевое положение парковки.
[Процесс содействия парковке]
Ниже процесс содействия парковке будет пояснен со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 4.
Как показано на фиг. 4, сначала выполняется процесс установки целевого положения парковки (этап S101). Этот процесс выполняется рядом с целевым положением парковки, и целевое положение парковки (режим парковки) выбирается и устанавливается на основании операции рулевого управления водителя из числа множественных возможных вариантов положения парковки. Здесь, перпендикулярная парковка, параллельная парковка и парковка под углом, каждая на правой и левой сторонах, может выбираться в качестве режима парковки. Эти режимы парковки будут пояснены со ссылкой на фиг. 5.
Фиг. 5(a) показывает перпендикулярную парковку. При перпендикулярной парковке транспортное средство 50 перед тем, как подвергается парковке, является почти перпендикулярным припаркованным транспортным средствам 51a и 51b, и транспортное средство 50 должно быть припарковано в парковочном пространстве 52. Фиг. 5(b) показывает параллельную парковку. При параллельной парковке транспортное средство 50 перед тем, как подвергается парковке, является почти параллельным припаркованным транспортным средствам 53a и 53b, и транспортное средство 50 должно быть припарковано в парковочном пространстве 54. Фиг. 5(c) показывает парковку под углом. При парковке под углом транспортное средство 50 перед тем, как подвергается парковке, скомпоновано наискось с припаркованными транспортными средствами 55a и 55b, и транспортное средство 50 должно быть припарковано в парковочном пространстве 56. На этапе S101 режим парковки (целевое положение парковки) выбирается и устанавливается согласно операции рулевого управления водителя из числа этих режимов парковки. Процесс выбора режима парковки на этапе S101 позже будет пояснен подробно.
Впоследствии, блок 5 вычисления режима парковки вычисляет траекторию парковки на основании зависимости положений между положением транспортного средства и целевым положением парковки (S102). Траектория, приведенная в соответствие с режимом парковки, установленным на этапе S101, загружается из памяти, в которой хранится каждая из траекторий, ассоциативно связанных с одной из перпендикулярной парковки, параллельной парковки и парковки под углом, и применяется к фактической компоновке для вычисления траектории парковки. Вычисленная траектория парковки включает в себя путь в положение переключения заднего хода и путь из положения переключения заднего хода в целевое положение парковки.
После того как траектория парковки вычислена, транспортное средство осуществляет маневрирование в целевое положение парковки (этап S103). В качестве способа маневра транспортного средства может быть перенят способ автоматического рулевого управления посредством системы содействия водителю или способ, в котором водитель действует вручную на основании операции рулевого управления, рекомендованной системой содействия водителю. Блок 5 вычисления режима парковки выполняет управление маневром посредством вычисления командных сигналов для блока 10 парковочного маневра наряду с передачей по обратной связи значений, зарегистрированных датчиком 8 рулевого управления так, чтобы транспортное средство могло двигаться по вычисленной траектории парковки. Отметим, что, хотя способ автоматического рулевого управления, в котором устройство 1 выбора режима парковки управляет блоком 10 парковочного маневра (электродвигателем EPS), перенят в настоящем варианте осуществления, устройство 1 выбора режима парковки может применяется к системе содействия водителю, посредством которой водитель действует вручную на основании рекомендованной операции рулевого управления, которая представлена. В этом случае блок 5 вычисления режима парковки выполняет управление маневром, представляя рекомендованную операцию рулевого управления через руководство экрана отображения на устройстве 7 отображения или голосовое руководство наряду с передачей по обратной связи значений, зарегистрированных датчиком 8 рулевого управления, так что транспортное средством может двигаться по вычисленной траектории парковки. В этом случае устройство 7 отображения или громкоговоритель является блоком вывода руководства.
Когда парковка транспортного средства в целевое положение парковки завершена, процесс содействия парковке с использованием устройства 1 выбора режима парковки заканчивается.
[Процесс выбора режима парковки]
Ниже процесс выбора режима парковки устройством 1 выбора режима парковки будет пояснен со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 6, и примеры отображаемых экранов киноизображения вида сверху, показанные на фиг. 7. В процессе выбора режима парковки, целевое положение парковки (режим парковки) устанавливается только посредством операции рулевого управления. Процесс выбора режима парковки является подпрограммой, выполняемой на поясненном выше по тексту этапе S101.
Как показано на фиг. 6, водитель останавливает транспортное средство рядом с целевым положением парковки (этап S201). В этот момент времени отображаемый в начале экран 701 на фиг. 7 отображается на устройстве 7 отображения. На отображаемом в начале экране 701 отображаются все шесть режимов парковки, перпендикулярная парковка, параллельная парковка и парковка под углом, каждые на левой и правой сторонах. Затем водитель начинает рулевое управление для выбора режима парковки (этап S202). Здесь предполагается, что рулевое колесо подвергается рулевому управлению из своего почти нейтрального состояния. В дополнение, угол θ поворота рулевого колеса определяется так, что его поворот по часовой стрелке (управление рулем вправо) является плюсом, а его поворот в направлении против часовой стрелки (управление рулем влево) является минусом.
Затем оценивается, влево или нет поворачивается рулевое колесо (на этапе S203). Когда рулевое колесо поворачивается влево, выполняются процессы для отображения режимов левосторонней парковки, которые переключаются согласно углу поворота (этапы с S210 по S217). Случай, в котором рулевое колесо поворачивается вправо, будет пояснен позже. Когда ответ этапа S203 утвердителен, оценивается, является или нет угол поворота равным или меньшим, чем -30° (этап S210). Когда угол поворота является большим, чем -30° (Нет на этапе S210), его поток обработки возвращается на этап S202.
С другой стороны, когда угол поворота является равным или меньшим, чем -30° (Да на этапе S210), оценивается, является или нет угол поворота равным или меньшим, чем -60° (этап S211). Когда угол поворота является большим, чем -60° (Нет на этапе S211), то есть в пределах диапазона от -30° до -60° угла поворота, выносится суждение, что выбрана левосторонняя перпендикулярная парковка и, тем самым, положение (режима парковки) левосторонней перпендикулярной парковки отображается на устройстве 7 отображения в выбранном состоянии (этап S217: экран 705 на фиг. 7).
Подобным образом, в пределах диапазона от -60° до -90° угла поворота (Нет на этапе S212), выносится суждение, что выбрана левосторонняя парковка под углом и, тем самым, положение (режим парковки) левосторонней парковки под углом отображается на устройстве 7 отображения в выбранном состоянии (этап S216: экран 706 на фиг. 7). В дополнение, в пределах диапазона от -90° до -120° угла поворота (Нет на этапе S213), выносится суждение, что выбрана левосторонняя параллельная парковка и, тем самым, положение (режим парковки) левосторонней параллельной парковки отображается на устройстве 7 отображения в выбранном состоянии (этап S215: экран 707 на фиг. 7). Отметим, что, когда угол поворота является равным или меньшим, чем -120° (Да на этапе S213), выносится суждение, что выбор режима парковки отменен (этап S214) и, тем самым, процесс выбора режима парковки заканчивается.
Наоборот, когда вынесено суждение, что рулевое колесо поворачивается вправо (Нет на этапе S203), процесс выбора для режимов правосторонней парковки выполняется подобно поясненному процессу выбора для режимов левосторонней парковки (этапы с S220 по S227: экраны с 702 по 704 на фиг. 7).
Поскольку режим парковки устанавливается в ассоциативной связи с диапазонами угла поворота, как пояснено выше по тексту, когда угол поворота входит в предопределенный диапазон угла поворота и, в силу этого, выбирается целевое положение парковки (режим парковки), ассоциативно связанное с углом поворота. В дополнение, целевое положение (режим парковки) левосторонней парковки выбирается посредством поворота влево рулевого колеса на этапах с S203 по S217, а целевое положение (режим парковки) правосторонней парковки выбирается поворотом вправо рулевого колеса на этапах с S220 по S227. Поэтому, поскольку направление вращения рулевого колеса совпадает с целевым положением парковки (режимом парковки), которое должно быть выбрано, целевое положение парковки (режим парковки) выбирать легко.
После того как целевое положение парковки (режим парковки) выбрано, как пояснено выше по тексту, рулевое колесо возвращается в свое нейтральное положение (этап S230), чтобы установить выбранный режим парковки (этап S231), и затем процесс выбора режима парковки заканчивается.
Водитель поворачивает рулевое колесо для изменения отображаемых экранов с 702 по 707 на фиг. 7, и поворачивает рулевое колесо обратно в нейтральное положение, когда желаемый режим парковки совпадает с отображаемым экраном. Когда режим рулевого управления возвращается близко к нейтральному положению, устанавливается режим парковки.
Отметим, что хотя режим парковки отображается в порядке перпендикулярной парковки, парковки под углом, а затем параллельной парковки в примере, показанном на фиг. 7, порядок может быть изменен. Например, предварительно измеряются частоты режимов парковки, и режимы парковки могут отображаться в порядке с режима парковки, имеющего наивысшую частоту. В примере, показанном на фиг. 8, предполагается, что параллельная парковка имеет наивысшую частоту, а параллельная парковка отображается в пределах диапазона от 30° до 60° (от -30° до -60°) угла поворота, перпендикулярная парковка отображается в пределах диапазона от 60° до 90° (от -60° до -90°) угла поворота, и парковка под углом отображается в пределах диапазона от 90° до 120° (от -90° до -120°) угла поворота. Согласно этому изменению, величина операции рулевого колеса может быть уменьшена, так чтобы было улучшено удобство.
График, показанный на фиг. 9, показывает зависимость между углом θ поворота и временем в течение выбора режима парковки, его горизонтальной осью является время t от начала поворота рулевого колеса, а его вертикальная ось является углом θ поворота. Как показано на фиг. 9, рулевое колесо поворачивается вправо на 70°, а затем возвращается в нейтральное положение в этом примере. В этом случае отображаемый экран переключается с отображаемого в начале экрана 701 в экраны 702 и 703, показанные на фиг. 7, а затем рулевое колесо возвращается в нейтральное положение во время экрана 703 для установки режима парковки. Отображаемый экран, когда рулевое колесо возвращается в нейтральное положение, по-прежнему является экраном 703. Отметим, что, хотя режим парковки устанавливается, когда рулевое колесо возвращается в нейтральное положение в вышеприведенном случае, режим парковки, например, может устанавливаться в момент времени, когда начат поворот рулевого колеса обратно в нейтральное положение, то есть в точке 90 на фиг. 9. В любом случае режим парковки устанавливается посредством операции возврата рулевого колеса в нейтральное положение.
В дополнение, может выдаваться экран отображения или голосовое руководство для побуждения возвратить рулевое колесо в нейтральное положение. Фиг. 10 показывает пример экрана отображения и пример голосового руководства в случае, когда выбрана левосторонняя перпендикулярная парковка. Как показано на фиг. 10, это может выполняться для отображения пиктограммы 901 на киноизображении 31 вида сверху, отображенном на устройстве 7 отображения, и отображения предложения 902 возле снятого изображения 32 (может отображаться только одно из них) для того, чтобы побудить водителя повернуть рулевое колесо вправо. Кроме того, это может делаться для вывода руководства «Чтобы начать парковочный маневр, пожалуйста, поверните рулевое колесо вправо», как показано в качестве голосового руководства 903. Экран отображения и голосовое руководство могут использоваться одновременно или в качестве альтернативы. Фиг. 10 показывает пример, где выбрана левосторонняя перпендикулярная парковка и вызван поворот вправо рулевого колеса, но поворот влево рулевого колеса будет вызываться в случае, когда выбран режим правосторонней парковки.
Кроме того, водитель может ясно опознавать режим парковки посредством звучания колокольного звона для представления, что режим парковки установлен, или отображения экрана руководства «Режим парковки установлен», когда рулевое колесо возвращается в нейтральное положение и, в силу этого, установлен режим парковки.
В дополнение, даже когда рулевое колесо возвращается в нейтральное положение и, тем самым, устанавливается режим парковки, выбор (установка) режима парковки может повторно выполняться поворачиванием рулевого колеса еще раз. Поэтому, даже при установке нежелательного режима парковки или при желании изменить режим парковки после того, как он был установлен.
[Преимущества согласно первому варианту осуществления]
Согласно устройству выбора режима парковки в поясненном выше по тексту первом варианте осуществления, водитель может ясно распознавать режим парковки посредством его/ее собственной операции, и может проводиться легкая операция, так как водитель может устанавливать режим парковки вместе с целевым положением парковки посредством его/ее собственной операции рулевого управления.
В дополнение, поскольку режим парковки выбирается согласно диапазонам угла поворота рулевого колеса, водитель может выбирать режим парковки всего лишь посредством поворачивания рулевого колеса и, тем самым, удобство и простота использования могут улучшаться.
В дополнение, поскольку режим парковки устанавливается операцией рулевого колеса в нейтральное положение после того, как режим парковки был выбран, водитель может ясно распознавать установку режима парковки, благодаря его/ее собственной операции.
В дополнение, поскольку режимы парковки включают в себя перпендикулярную парковку, параллельную парковку и парковку под углом, каждая на правой и левой сторонах, и направление поворота рулевого колеса соответствует целевому положению парковки (режиму парковки) при выборе режима парковки, водитель может легко распознавать режим парковки.
В дополнение, поскольку диапазон угла поворота для перпендикулярной парковки, диапазон угла поворота для парковки под углом и диапазон угла поворота для параллельной парковки распределены последовательно от ближней стороны нейтрального положения, режимы парковки отображаются в последовательности от целевых положений парковки (режимов парковки), близких к сиденью водителя при повороте рулевого колеса (то есть, они отображаются в порядке, который не обеспечивает ощущения странности посредством непрерывного изменения поясненного позже угла ω парковочной рамки (см. фиг.20)). Поэтому режимы парковки отображаются в порядке, который отвечает требованиям восприимчивости водителя, так что может улучшаться удобство и простота использования.
В дополнение, величина операции рулевого колеса может уменьшаться при выборе режима парковки посредством размещения режима парковки с более высокой частотой парковки на более близкой стороне нейтрального положения. Частоты парковки могут обновляться на основании истории выполнения управления содействием парковке.
В дополнение, поскольку экран отображения или голосовое руководство для побуждения возврата рулевого колеса в нейтральное положение при установке режима парковки после того, как режим парковки был выбран, водитель может ясно распознавать операцию для возврата рулевого колеса в нейтральное положение.
<Второй вариант осуществления>
Ниже второй вариант осуществления будет пояснен со ссылкой на фиг. с 11 по 14. Отметим, что конфигурации, идентичные или подобные таковым в поясненном выше по тексту первом варианте осуществления, помечены идентичными номерами, а их подробные пояснения опущены.
[Конфигурация устройства содействия парковке]
Как показано на фиг. 11, устройство 111 содействия парковке согласно настоящему варианту осуществления дополнительно включает в себя блок 112 вычисления крутящего момента, который вычисляет крутящий момент для возврата рулевого колеса в нейтральное положение.
В случае, когда рулевое колесо возвращается в нейтральное положение после того, как ходовые колеса были повернуты поворачиванием рулевого колеса из состояния останова, система рулевого управления может двигаться сама по себе вследствие энергии остаточного перекоса шин при снятии рук с рулевого колеса, так что рулевое колесо может поворачиваться само по себе. Если угол θ поворота выходит из диапазона (-α<θ<α) установки режима парковки возле нейтрального положения посредством этого поворачивания, режим парковки, который был установлен, отменяется, и она подвергается переходу к операции для выбора режима парковки. Поэтому блок 112 вычисления крутящего момента вычисляет значение крутящего момента для поворачивания рулевого колеса в нейтральное положение (для установления угла θ поворота в 0°) на основании угла поворота, зарегистрированного датчиком 8 рулевого управления во время процесса выбора режима парковки, главным образом для того, чтобы предотвратить поворачивание рулевого колеса, вызванное энергией остаточного перекоса. Вычисленное значение крутящего момента выводится в блок 10 парковочного маневра (электродвигатель EPS) через контроллер 9 парковочного маневра. Блок 10 парковочного маневра (электродвигатель EPS) предотвращает поворачивание рулевого колеса вследствие энергии остаточного перекоса посредством генерирования крутящего момента вычисленного значения крутящего момента. Здесь блок 10 парковочного маневра (электродвигатель EPS) функционирует в качестве генератора крутящего момента.
[Процесс вычисления крутящего момента]
Ниже будет пояснен процесс вычисления значения крутящего момента устройством 111 выбора режима парковки. Процесс вычисления значения крутящего момента и поясненный выше по тексту процесс выбора режима парковки (смотрите фиг. 6) выполняются параллельно.
В процессе вычисления крутящего момента крутящий момент по направлению в нейтральное положение (реактивный крутящий момент T1-T3, показанный на фиг. 12(b): крутящий момент в направлении против часовой стрелки) вычисляется блоком 112 вычисления крутящего момента, если угол поворота изменяется вследствие операции рулевого управления водителя. Например, как показано на фиг. 12(b), в случае, когда угол θ поворота увеличивается (операция рулевого управления по часовой стрелке), прикладывается крутящий момент против часовой стрелки (реактивный крутящий момент T1>0), который генерирует силу реакции рулевого управления против поворачивания рулевого колеса. Здесь, прикладывается реактивный крутящий момент T1, который становится большим наряду с увеличением угла θ поворота, так что водитель может легко распознавать величину управления рулем. Этот реактивный крутящий момент T1 непрерывно прикладывается, в то время как рулевое колесо поворачивается в направлении по часовой стрелке во время выбора режима парковки.
Затем, когда водитель поворачивает рулевое колесо в нейтральное положение после выбора режима парковки, для того чтобы установить режим парковки, прикладывается крутящий момент против часовой стрелки (реактивный крутящий момент T2>0), больший, чем реактивный крутящий момент T1. Этот реактивный крутящий момент T2 способствует поворачиванию рулевого колеса в нейтральное положение. После возврата в диапазон (-α<θ<α), близкий к нейтральному положению, крутящий момент (реактивный крутящий момент T3) по направлению в нейтральное положение прикладывается для того, чтобы ограничить поворачивание рулевого колеса за пределы из диапазона установки режима парковки вследствие энергии остаточного перекоса. Поскольку абсолютная величина реактивного крутящего момента T3 в целом изменяется вследствие максимального значения угла θ поворота, соответствующий реактивный крутящий момент T3 вычисляется посредством сохранения максимального значения угла θ поворота во время выбора режима парковки.
Ниже поясненный выше по тексту процесс вычисления значения крутящего момента будет пояснен со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 13.
Как показано на фиг. 13, система EPS переключается из нормального режима в режим автоматического рулевого управления (этап S301). Режим автоматического рулевого управления, в отличие от нормального режима, является режимом, в котором электродвигатель 10 EPS управляется для генерирования крутящего момента, вычисленного благодаря процессу вычисления крутящего момента.
Затем оценивается, находится или нет угол θ поворота в диапазоне (-α<θ<+α), близком к нейтральному положению (этап S302). Если угол θ поворота находится за пределами диапазона установки режима парковки (Нет на этапе S302), оценивается, управляется он или нет рулем по направлению в нейтральное положение (этап S303). Если он управляется рулем, с тем чтобы дистанцироваться от нейтрального положения (Нет на этапе S303), заранее заданная таблица или тому подобное, извлекается, и затем вычисляется значение крутящего момента, соответствующее абсолютному значению реактивного крутящего момента T1 (смотрите фиг. 12(b)) (этап S304).
Затем оценивается, является или нет угол θ поворота большим, чем ноль, то есть поворачивается или нет рулевое колесо в направлении по часовой стрелке (этап S305). Если угол θ поворота является большим, чем ноль (Да на этапе S305), знак вычисленного значения крутящего момента устанавливается в минус (этап S306), так как рулевое колесо поворачивается в направлении по часовой стрелке. Другими словами, вычисленное значение крутящего момента со знаком минус соответствует реактивному крутящему моменту T1 (>0: в направлении против часовой стрелки) в нейтральное положение. С другой стороны, если рулевое колесо поворачивается в направлении против часовой стрелки (Нет на этапе S305), знак вычисленного значения крутящего момента устанавливается в плюс (этап S307), так как рулевое колесо поворачивается в направлении против часовой стрелки. Другими словами, вычисленное значение крутящего момента со знаком плюс соответствует реактивному крутящему моменту T1 (<0: в направлении по часовой стрелке) в нейтральное положение. Вычисленное значение крутящего момента выводится на электродвигатель 10 EPS в качестве командного значения крутящего момента.
С другой стороны, если оно управляется рулем в нейтральное положение (Да на этапе S303), значение крутящего момента (реактивного крутящего момента T2) вычисляется, а затем выводится на электродвигатель 10 EPS в качестве командного значения крутящего момента на протяжении этапов с S309 по S313, подобно поясненным выше по тексту этапам с S304 по S308.
Отметим, что угол θ поворота находится в диапазоне (-α<θ<α) установки режима парковки (Да на этапе S302), значение крутящего момента, соответствующее поясненному выше по тексту реактивному моменту T3, вычисляется, для того чтобы предохранить рулевое колесо от поворачивания из нейтрального положения посредством энергии остаточного перекоса. Прежде всего извлекается заранее заданная таблица или тому подобное, а затем значение крутящего момента вычисляется на основании максимального угла θmax поворота (и его направления Pmem управления рулем) во время выбора режима парковки (этап S314).
Здесь, процесс сохранения максимального угла θmax поворота (>0: абсолютное значение угла) во время выбора режима парковки, и его хранимого знака Pmem (плюс или минус: направления управления рулем), и процесс вычисления значения крутящего момента на этапе S314 будет пояснен со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 14. Как пояснено выше по тексту, крутящий момент, вызванный энергией остаточного перекоса, изменяется согласно максимальному значению угла θ поворота во время выбора режима парковки. Поэтому адекватное значение крутящего момента может вычисляться посредством сохранения максимального значения угла θ поворота, то есть, максимального угла θmax поворота (и его направления Pmem управления рулем).
Как показано на фиг. 14, прежде всего текущий знак (плюс или минус) Ppresent угла θ поворота сохраняется в качестве хранимого знака Pmem, и текущий угол θpresent поворота сохраняется в качестве максимального угла θmax поворота (этап S401). Текущий угол θpresent поворота и текущий знак Ppresent регистрируются датчиком 8 рулевого управления, и максимальный угол θmax поворота и хранимый знак Pmem сохраняются в блоке 5 вычисления режима парковки через блок 4 выбора режима парковки.
Затем оценивается, является или нет текущий угол θpresent поворота большим, чем хранимый максимальный угол θmax поворота (этап S402). Если текущий угол θpresent поворота не является большим, чем хранимый максимальный угол θmax поворота (Нет на этапе S402), поток обработки переходит на этап S404 без какого бы то ни было изменения, так как максимальное значение угла θ поворота не обновляется. С другой стороны, если текущий угол θpresent поворота является большим, чем хранимый максимальный угол θmax поворота (Да на этапе S402), максимальный угол θmax поворота обновляется текущим углом θpresent поворота (этап S403), так как максимальное значение угла θ поворота было обновлено.
Вслед за этапами S402 и S403 оценивается, совпадает или нет текущий знак Ppresent с хранимым знаком Pmem, то есть, является или нет текущее направление управления рулем отличным от сохраненного ранее значения (этап S404). Если текущий знак Ppresent совпадает с хранимым знаком Pmem (Нет на этапе S404), поток операций переходит на этап S406 без какого бы то ни было изменения, так как направление управления рулем не изменялось. С другой стороны, если текущий знак Ppresent не совпадает с хранимым знаком Pmem (Да на этапе S404), хранимый знак Pmem обновляется текущим знаком Ppresent а хранимый максимальный угол θ поворота обновляется текущим углом θpresent поворота (этап S405), так как направление управления рулем изменилось.
Вслед за этапами S404 и S405 извлекается заранее заданная таблица или тому подобное, и значение крутящего момента вычисляется на основании максимального угла θmax поворота и хранимого знака Pmem (этап S406), и тем самым процесс вычисления значения крутящего момента заканчивается.
Отметим, что, поскольку применяемое направление энергии остаточного перекоса переустанавливается, когда изменилось направление управления рулем, хранимый знак Pmem и максимальный угол θmax поворота оба обновляются в случае, когда этап S404 утвердителен. Здесь, хотя оценка на этапе S402 производится только на основании угла θ поворота (>0: абсолютного значения) независимо от того, является или нет текущее направление управления рулем отличным от сохраненного ранее значения, это не является проблематичным, так как хранимые знак Pmem и максимальный угол θmax поворота оба обновляются согласно результатам оценки для угла управления рулем на следующем этапе S404. В дополнение, например, в случае, когда только максимальное значение угла θ поворота обновляется без изменения направления управления рулем, поток обработки переходит к: Да на этапе S402 -> этап S403 (обновляется только максимальный угол θmax поворота -> Нет на этапе S404 -> этап S406).
Пояснение блок-схемы последовательности операций способа, показанной на фиг. 13, будет продолжено. Когда значение крутящего момента вычислено на этапе S314, оценивается, является или нет угловая скорость ω угла θ поворота большей, чем ноль, то есть, в каком направлении поворачивается рулевое колесо (этап S315). Если угловая скорость ω является большей, чем ноль (Да на этапе S315), устанавливается значение крутящего момента со знаком плюс (реактивного крутящего момента T3, имеющего значение со знаком минус), чье стремление направления против часовой стрелки усиливается вычитанием запаса γ (>0) из значения крутящего момента, вычисленного на этапе S314 (этап S316), так как рулевое колесо поворачивается в нейтральное положение в направлении по часовой стрелке. С другой стороны, если угловая скорость ω не является большей, чем ноль (Нет на этапе S315), устанавливается значение крутящего момента со знаком минус (реактивного крутящего момента T3, имеющего значение со знаком плюс), чье стремление направления по часовой стрелке усиливается прибавлением запаса β (>0) к значению крутящего момента, вычисленному на этапе S314 (этап S317), так как рулевое колесо поворачивается в нейтральное положение в направлении против часовой стрелки. Отметим, что запасы β и γ могут быть заранее заданы с тем, чтобы иметь идентичное значение. Установленное значение выводится на электродвигатель 10 EPS в качестве командного значения крутящего момента.
[Преимущества согласно второму варианту осуществления]
Согласно устройству выбора режима парковки в поясненном выше по тексту втором варианте осуществления, поворачивание рулевого колеса, вызванное энергией остаточного перекоса шин, может ограничиваться, и режим парковки может уверено устанавливаться, так как прикладывается крутящий момент для поворачивания в нейтральное положение.
<Третий вариант осуществления>
Ниже третий вариант осуществления будет пояснен со ссылкой на фиг. 15 и 16. Отметим, что конфигурации, идентичные или подобные таковым в поясненных выше по тексту первом и втором вариантах осуществления, помечены идентичными номерами, а их подробные пояснения опущены.
В настоящем варианте осуществления, как показано на фиг. 15, крутящий момент по направлению к нейтральному положению (реактивный крутящий момент T4) прикладывается, только когда угол θ поворота находится в пределах диапазона (-α<θ<α) установки режима парковки поблизости от нейтрального положения. С другой стороны, система EPS управляется в нормальном режиме, когда угол θ поворота находится вне диапазона (-α<θ<α) установки режима парковки.
Например, как показано на фиг. 15, крутящий момент против часовой стрелки (реактивный крутящий момент, имеющий значение со знаком плюс) прикладывается в диапазоне -α<θ<α. Водитель может получать умеренное реактивное ощущение посредством этого крутящего момента, так что угол θ поворота может удерживаться в нейтральном положении (θ=0°). В дополнение, поясненное выше по тексту поворачивание рулевого колеса, вызванное энергией остаточного перекоса, может ограничиваться этим крутящим моментом. Максимальное значение этого реактивного крутящего момента T4 устанавливается в значение, которое обеспечивает водителю умеренное реактивное ощущение, не мешая операции рулевого управления водителя, и может ограничивать поворачивание рулевого колеса, вызванное энергией остаточного перекоса. Затем, в диапазоне -α<θ<α, операция рулевого управления во время выбора режима парковки управляется посредством нормального управления рулевым управлением с усилителем. К тому же, в диапазоне θ<0 подобное управление выполняется симметрично.
Ниже вышеупомянутый процесс вычисления значения крутящего момента будет пояснен со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 16.
Как показано на фиг. 16, обычно система EPS управляется в нормальном режиме (этап S501). Оценивается, находится или нет угол θ поворота внутри диапазона (-α<θ<α) установки режима парковки (этап S502). Если угол θ поворота не находится внутри диапазона (-α<θ<α) установки режима парковки (Нет на этапе S502), сохраняется нормальный режим (этап S506), а затем, процесс вычисления значения крутящего момента заканчивается.
С другой стороны, угол θ поворота находится внутри диапазона (-α<θ<α) установки режима парковки (Да на этапе S502), извлекается заранее заданная таблица, или тому подобное, а затем вычисляется значение крутящего момента в нейтральное положение (реактивный крутящий момент T4) (этап S503). Затем система EPS является системой, которая переключается из нормального режима в режим автоматического рулевого управления (этап S504), и вычисленное значение крутящего момента выводится на электродвигатель 10 EPS в качестве командного значения крутящего момента (этап S505).
[Преимущества согласно третьему варианту осуществления]
Согласно устройству выбора режима парковки в поясненном выше по тексту третьем варианте осуществления, поскольку крутящий момент в нейтральное положение (реактивный крутящий момент) прикладывается, только когда угол θ поворота находится в предопределенном диапазоне поблизости от нейтрального положения, можно давать водителю умеренное реактивное ощущение в вышеприведенном диапазоне и давать водителю естественное ощущение посредством нормального управления рулевым управлением с усилителем вне вышеприведенного диапазона.
<Четвертый вариант осуществления>
Ниже четвертый вариант осуществления будет пояснен со ссылкой на фиг. с 17(a) по 18. Отметим, что конфигурации, идентичные или подобные таковым в поясненных выше по тексту с первого по третий вариантах осуществления, помечены идентичными номерами, а их подробные пояснения опущены.
В настоящем варианте осуществления, как показано на фиг. 17(a) и 17(b), целевые положения с 175 по 178 устанавливаются в центрах диапазонов с 171 по 174 угла поворота, соответственно. Затем, как показано на фиг. 17(b), во время поворачивания рулевого колеса для выбора режима парковки, крутящий момент по направлению к нейтральному положению (реактивный крутящий момент T5) прикладывается с тем, чтобы увеличивать реактивное ощущение, ощущаемое водителем при прохождении каждого из целевых положений со 175 по 178. В дополнение, эта реактивная подача уменьшается на каждой передней стороне целевых положений со 175 по 178 так, что следующее целевое положение со 175 по 175 делается легко выбираемым. Отметим, что, хотя только операция рулевого управления влево показана на фиг. 17(b), подобное управление выполняется симметрично для направленной вправо операции.
Крутящий момент в нейтральное положение прикладывается посредством прикладывания реактивного крутящего момента T5 во время выбора режима парковки поблизости от нейтрального положения подобно вышеприведенному третьему варианту осуществления, а вне окрестности нейтрального положения, реактивное ощущение увеличивается при прохождении каждого из целевых положений со 175 по 178, и крутящий момент прикладывается с тем, чтобы уменьшать реактивное ощущение на каждой передней стороне целевых положений со 175 по 178. Как результат, угол θ поворота может становиться удерживаемым в каждом из целевых положений с 175 по 178. Поэтому, можно давать водителю умеренное реактивное ощущение, а удобство и простота использования улучшаются, так как диапазоны с 171 по 174 угла поворота становятся легко выбираемыми.
Отметим, что самый внешний диапазон T5 является диапазоном для отмены режима парковки, и реактивный крутящий момент T5 ощутимо увеличивается после прохождения через его целевое положение 178. Поскольку реактивное ощущение водителя ощутимо увеличивается после прохождения целевого положения 178, излишняя операция рулевого управления (чрезмерное поворачивание) водителем может предотвращаться. В дополнение, реактивный крутящий момент T5 обеспечивает водителю реактивное ощущение во время выбора режима парковки и стимулирует возврат в нейтральное положение при возврате рулевого колеса в нейтральное положение после того, как был выбран режим парковки.
Ниже вышеупомянутый процесс вычисления значения крутящего момента будет пояснен со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 18.
Как показано на фиг. 18, система EPS переключается из нормального режима в режим автоматического рулевого управления (этап S601). Затем извлекается заранее заданная таблица или тому подобное, и тогда значение крутящего момента по направлению в нейтральное положение (реактивного крутящего момента T5), как показано на фиг. 17(b), вычисляется на основании угла θ поворота, зарегистрированного датчиком 8 рулевого управления, и таблицы (этап S602). Затем вычисленное значение крутящего момента выводится на электродвигатель 10 EPS в качестве значения команды крутящего момента (этап S603).
[Преимущества согласно четвертому варианту осуществления]
Согласно устройству выбора режима парковки в поясненном выше по тексту четвертом варианте осуществления, целевые положения находятся в центрах диапазонов угла поворота для режимов парковки, соответственно, и крутящий момент по направлению в нейтральное положение (реактивный крутящий момент) прикладывается, когда угол поворота смещается от целевых положений. Поэтому угол поворота может становиться удерживаемым в каждом из целевых положений наряду с выдачей водителю умеренного реактивного ощущения во время выбора режима парковки и, тем самым, могут быть улучшены удобство и простота использования выбора режима парковки.
<Пятый вариант осуществления>
Ниже пятый вариант осуществления будет пояснен со ссылкой на фиг. с 19 по 24. Отметим, что конфигурации, идентичные или подобные таковым в поясненных выше по тексту с первого по четвертый вариантах осуществления, помечены идентичными номерами, а их подробные пояснения опущены. В настоящем варианте осуществления, отображается киноизображение 31 вида сверху, которое обеспечивает возможность усовершенствованного выбора угла парковки при выборе режима парковки, такого как парковка под углом и параллельная парковка.
[Процесс выбора режима парковки]
В настоящем варианте осуществления процесс выбора режима парковки, показанный на фиг. 19, выполняется в качестве замены для процесса выбора режима парковки, показанного на фиг. 6 в первом варианте осуществления. Конфигурации устройства 1 выбора режима парковки в настоящем варианте осуществления идентичны таковым в первом варианте осуществления. Процесс выбора режима парковки посредством устройства 1 выбора режима парковки согласно настоящему варианту осуществления будет пояснен со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 19, и примеры отображаемых экранов киноизображения вида сверху, показанного на фиг. 20. На фиг. 19 и 20 элементы, идентичные таковым в первом варианте осуществления, помечены идентичными номерами.
Как показано на фиг. 19, водитель останавливает транспортное средство рядом с целевым положением парковки (этап S201). В этот момент времени отображаемый в начале экран 701 на фиг. 20 отображается в киноизображении вида сверху на устройстве 7 отображения. На отображаемом в начале экране 701 отображаются все шесть режимов парковки, перпендикулярная парковка, параллельная парковка и парковка под углом, каждые на левой и правой сторонах. Затем водитель начинает рулевое управление для выбора режима парковки (этап S202). К тому же, здесь предполагается, что рулевое колесо подвергается рулевому управлению из своего почти нейтрального состояния.
Затем оценивается, влево или нет поворачивается рулевое колесо (на этапе S203). Когда рулевое колесо поворачивается влево, выполняются процессы для отображения режимов левосторонней парковки, которые переключаются согласно углу поворота (этапы S210 и с S240 по S249). Что касается последовательностей операций для случая, в котором рулевое колесо поворачивается вправо (случая правосторонней парковки), поскольку управляющие воздействия, подобные таковым для левой стороны, выполняются симметричным образом, их подробные описания опущены. В дальнейшем процессы подробно пояснены с рулевым управление влево, взятым в качестве примера.
Когда ответ на этапе S203 утвердителен, оценивается, является или нет угол поворота равным или меньшим, чем -30° (этап S210). Когда угол поворота является большим, чем -30° (Нет на этапе S210), ее поток обработки возвращается на этап S202.
С другой стороны, когда угол поворота является равным или меньшим, чем -30° (Да на этапе S210), оценивается, является или нет угол поворота равным или меньшим, чем -40° (этап S240). Когда угол поворота является большим, чем -40° (Нет на этапе S240), то есть, в пределах диапазона от -30° до -40° угла поворота, выносится суждение, что выбрана левосторонняя перпендикулярная парковка и, тем самым, положение (режима парковки) левосторонней перпендикулярной парковки отображается на устройстве 7 отображения в выбранном состоянии (этап S249: экран 705 на фиг. 20). При перпендикулярной парковке отображаемый угол ω (угол парковочной рамки) не изменяется в пределах диапазона от -30° до -40° угла поворота (постоянен, причем ω=0°). Отметим, что угол ω парковочной рамки в варианте осуществления установлен в качестве угла продольного направления транспортного средства в целевом положении парковки относительно направления ширины транспортного средства в остановленном положении транспортного средства, как показано на экранах 706c и 707a (направление против часовой стрелки определено как плюс).
Подобным образом, в пределах диапазона от -40° до -100° угла поворота (Нет на этапе S241), выносится суждение, что выбрана левосторонняя парковка под углом и, тем самым, положение (режим парковки) левосторонней парковки под углом отображается на устройстве 7 отображения в выбранном состоянии (этап S248: экраны с 706a по 706c на фиг. 20). В случае парковки под углом, угол θ поворота регистрируется датчиком 8 рулевого управления в пределах диапазона от -40° до -100° угла поворота, и угол ω парковочной рамки изменяется согласно зарегистрированному углу θ поворота. Чем больше абсолютная величина угла θ поворота, тем больше абсолютная величина угла ω парковочной рамки. В дополнение, поскольку направление поворота рулевого колеса совпадает с направлением поворота расположенной под углом парковочной рамки на киноизображении 31 вида сверху, водитель может легко распознавать его и, тем самым, удобство и простота использования могут улучшаться.
Подобным образом, в пределах диапазона от -100° до -110° угла поворота (Нет на этапе S242), выносится суждение, что выбрана левосторонняя параллельная парковка (угол ω парковочной рамки является острым углом) и, тем самым, положение (режим парковки) левосторонней параллельной парковки отображается на устройстве 7 отображения в выбранном состоянии (этап S247: экран 707a на фиг. 20). Однако, параллельная парковка на этапе S247 является параллельной парковкой с острым углом ω парковочной рамки, и угол θ поворота регистрируется датчиком 8 рулевого управления в пределах диапазона от -100° до -110° угла поворота, и угол ω парковочной рамки изменяется согласно зарегистрированному углу θ поворота. Здесь, к тому же, чем больше абсолютная величина угла θ поворота, тем больше абсолютная величина угла ω парковочной рамки. В дополнение, поскольку направление поворота рулевого колеса совпадает с направлением поворота параллельной парковочной рамки на киноизображении 31 вида сверху, водитель может распознавать его и, тем самым, удобство и простота использования могут улучшаться.
Подобным образом, в пределах диапазона от -110° до -120° угла поворота (Нет на этапе S243), выносится суждение, что выбрана левосторонняя параллельная парковка (угол ω парковочной рамки ω=90°) и, тем самым, положение (режим парковки) левосторонней параллельной парковки отображается на устройстве 7 отображения в выбранном состоянии (этап S246: экран 707 на фиг. 20). Угол ω парковочной рамки у парковочной рамки не изменяется в пределах диапазона от -110° до -120° угла поворота (постоянен, причем, θ=90°). Поскольку экран киноизображения 31 вида сверху зафиксирован в пределах диапазона от -110° до -120° угла поворота, водитель может легко выбирать этот режим парковки, что часто выполняется.
Подобным образом, в пределах диапазона от -120° до -130° угла поворота (Нет на этапе S244), выносится суждение, что выбрана левосторонняя параллельная парковка (угол ω парковочной рамки ω является тупым углом) и, тем самым, положение (режим парковки) левосторонней параллельной парковки отображается на устройстве 7 отображения в выбранном состоянии (этап S245: экран 707b на фиг. 20). Однако, параллельная парковка на этапе S245 является параллельной парковкой с тупым углом ω парковочной рамки, и угол θ поворота регистрируется датчиком 8 рулевого управления в пределах диапазона от -120° до -130° угла поворота, и угол ω парковочной рамки изменяется согласно зарегистрированному углу θ поворота. Здесь, к тому же, чем больше абсолютная величина угла θ поворота, тем больше абсолютная величина угла ω парковочной рамки. В дополнение, поскольку направление поворота рулевого колеса совпадает с направлением поворота параллельной парковочной рамки на киноизображении 31 вида сверху, водитель может распознавать его и, тем самым, удобство и простота использования могут улучшаться.
Отметим, что, когда угол поворота является равным или меньшим, чем -130° (Да на этапе S244), выносится суждение, что выбор режима парковки отменен (этап S214) и, тем самым, процесс выбора режима парковки заканчивается. После того, как целевое положение парковки (режим парковки), включающее в себя угол ω парковочной рамки, выбрано, как пояснено выше по тексту, рулевое колесо возвращается в нейтральное положение (этап S230), чтобы установить выбранный режим парковки (этап S231), и затем, процесс выбора режима парковки заканчивается.
Поясненная выше по тексту зависимость между углом θ поворота и углом ω парковочной рамки будет пояснена со ссылкой на график, показанный на фиг. 21. Как показано на фиг. 21, в пределах диапазона R1 угла поворота (диапазона установки режима парковки), в котором угол θ поворота имеет значение от +30° до -30°, парковочная рамка не отображается. Однако, в пределах диапазона R2 угла поворота, в котором угол θ поворота имеет значение от -30° до -40°, перпендикулярная парковочная рамка отображается, в то время как угол ω парковочной рамки имеет значение 0° (постоянное). Затем, в пределах диапазона R3 угла поворота, в котором угол θ поворота имеет значение от -40° до -100°, отображается расположенная под углом парковочная рамка, в то время как угол ω парковочной рамки непрерывно изменяется от -10° до 50°. Кроме того, в пределах диапазона R4 угла поворота, в котором угол θ поворота имеет значение от -100° до -110°, отображается параллельная парковочная рамка, в то время как угол ω парковочной рамки непрерывно изменяется от 80° до 90°. Кроме того, в пределах диапазона R5 угла поворота, в котором угол θ поворота имеет значение от -110° до -120°, параллельная парковочная рамка отображается, в то время как угол ω парковочной рамки имеет значение 90° (постоянное). Кроме того, в пределах диапазона R6 угла поворота, в котором угол θ поворота имеет значение от -120° до -130°, отображается параллельная парковочная рамка, в то время как угол ω парковочной рамки непрерывно изменяется от 90° до 100°.
Отметим, что график на фиг. 21 показывает случай, в котором угол ω парковочной рамки непрерывно изменяется согласно изменению угла θ поворота. Однако, как показано на графике, показанном на фиг. 22, угол ω парковочной рамки может изменяться ступенчатым образом согласно изменению угла θ поворота. В этом случае приспособляемость угла ω парковочной рамки, способного изменяться, снижается, но водитель может легко выполнять выбор, и удобство может быть улучшено вследствие отсутствия необходимости доскональной настройки угла.
Ниже подробный способ представления угла ω парковочной рамки согласно углу θ поворота будет пояснен со ссылкой на фиг. 23.
Как показано на фиг. 23, в случае, когда рулевое колесо поворачивается влево на отображаемом в начале экране 701, экран 715 отображения отображается в момент времени, когда угол θ поворота становится -30°. Если рулевое колесо поворачивается дальше, экран 715 отображения переключается на экран 716a отображения в момент времени, когда угол θ поворота становится -40°. Затем, в пределах диапазона от -40° до -100° угла поворота, экран отображения обновляется из экрана 716a отображения в экран 716c отображения наряду с тем, что угол ω парковочной рамки увеличивается согласно изменению угла θ поворота. Затем, экран 716c отображения переключается в экран 717a отображения, когда угол θ поворота становится -100°. Отметим, что экраны с 715 по 717a отображения на фиг. 23 показаны с каждым участком экранов, являющимся увеличенным, так чтобы они были легко понятны.
Вершины перпендикулярной парковочной рамки, показанной на экране 715 отображения, определены в качестве A1 и A2, вершины расположенной под углом парковочной рамки, показанной на экране 716a отображения, определены в качестве B1 и B2, и вершина параллельной парковочной рамки, показанной на экране 717a отображения, определена в качестве C1. Расположенные под углом парковочные рамки, показанные на экранах 716a и 716c отображения, поворачиваются вокруг вершины A1. Поэтому, при переключении с экрана 715 отображения на экран 716a отображения, вершина A1 совмещается с вершиной B1. Однако, между экраном 716a отображения и экраном 716c отображения, вершина B2 постепенно отходит от вершины A2. В дополнение, при переключении с экрана 716c отображения на экран 717a отображения, становится легко понятным, что следует смещать расположенную под углом парковочную рамку на параллельную парковочную рамку с вершиной B2, совпадающей с вершиной C1. Кроме того, параллельная парковочная рамка поворачивается вокруг вершины C1.
Здесь, будет пояснен способ для вычисления расстояния x между вершиной B2 и вершиной A2. На основании ширины w перпендикулярной парковочной рамки, угла ω парковочной рамки и треугольника A1B2D на экране 716c отображения, справедливо уравнение (1), показанное ниже по тексту.
Вследствие вышеприведенного уравнения (1) расстояние x вычисляется посредством уравнения (2), показанного ниже по тексту.
Если парковочная рамка смещается посредством совмещения вершины B2, рассчитанной на основании расстояния x, с вершиной C1 при переключении с экрана 716c отображения на экран 717a отображения, ощущение странности наряду с переключением с расположенной под углом парковочной рамки на параллельную парковочную рамку, может снижаться, так что водитель может легче видеть ее представление.
Отметим, что угол ω парковочной рамки однажды выбранной расположенной под углом парковочной рамки, может корректироваться. Фиг. 24 показывает пример изменения угла θ поворота при корректировке угла ω парковочной рамки. Как показано на фиг. 24, рулевое колесо поворачивается на θ=-75° в зоне r1, а затем, поворачивается по направлению к нейтральному положению в зоне r2. В этом случае, угол ω расположенной под углом парковочной рамки удерживается на ω=25° (соответствующем θ=-75°) в зоне r2 (смотрите фиг. 21). Однако, рулевое колесо вновь поворачивается влево от θ=-65°, так что это оценивается в качестве коррекции угла ω парковочной рамки, и угол ω парковочной рамки в киноизображении 31 вида сверху изменяется согласно изменению угла θ поворота. Затем рулевое колесо поворачивается на θ=-70° в зоне r3, а затем, возвращается в нейтральное положение в зоне r4. Поэтому, угол ω расположенной под углом парковочной рамки удерживается на ω=20° (соответствующем θ=-70°) в зоне r4, а затем, режим парковки с углом ω=20° расположенной под углом парковочной рамкой устанавливается окончательно. Если угол ω расположенной под углом парковочной рамки ошибочно выбран, как пояснено выше по тексту, он может легко корректироваться операцией рулевого управления.
[Преимущества согласно пятому варианту осуществления]
Согласно устройству выбора режима парковки в поясненном выше по тексту пятом варианте осуществления, угол парковки под углом и параллельной парковки может свободно выбираться согласно операции рулевого управления, так что удобство может быть улучшено.
В дополнение, поскольку направление поворота рулевого колеса совпадает с направлением поворота парковочной рамки на экране, водитель может легко распознавать его и, тем самым, удобство и простота использования могут улучшаться.
В дополнение, при переключении с парковки под углом на параллельную парковку на экране отображения, поскольку вершина расположенной под углом парковочной рамки совмещается с вершиной параллельной парковочной рамки, ощущение странности наряду с переключением парковочных рамок может снижаться, так что водитель может легко видеть ее представление.
Кроме того, выбор (установка) угла парковки может выполняться повторно, так что может легко выполняться коррекция режима парковки.
<Шестой вариант осуществления>
Ниже шестой вариант осуществления будет пояснен со ссылкой на фиг. с 25 по 28. Отметим, что конфигурации устройства 1 выбора режима парковки в настоящем варианте осуществления идентичны таковым в первом варианте осуществления. В дополнение, конфигурации, идентичные или подобные таковым в поясненных выше по тексту с первого по пятый вариантах осуществления, помечены идентичными номерами, а их подробные пояснения опущены. В представленном варианте осуществления, другой способ управления перенят для предотвращения непреднамеренной отмены из уже установленного режима парковки, приведенного поясненным выше по тексту нежелательным поворотом рулевого колеса, вызванным энергией остаточного перекоса шин. Здесь, пороговое значение θth устанавливается внутри диапазона (-α<θ<α) установки режима парковки, и проблема, вызванная энергией остаточного перекоса, преодолевается посредством использования этого порогового значения θth.
Как показано на фиг. 25, пороговое значение θth для случая установки режима левосторонней парковки, устанавливается внутри диапазона (-α<θ<α) установки режима парковки. Для того чтобы устанавливать режим парковки посредством возврата рулевого колеса в нейтральное положение после того, как режим парковки был выбран поворачиванием влево рулевого колеса, необходимо управлять рулевым колесом, так чтобы угол θ поворота проходил граничное значение -α, а затем дополнительно проходил пороговое значение θth.
Направление поворота рулевого колеса, вызванное энергией остаточного перекоса, является левосторонним в этом случае. В случае, когда пороговое значение θth устанавливается, как пояснено выше по тексту, угол θ поворота остается в пределах диапазона -α<θ<θth и никогда не выходит из диапазона установки режима парковки, даже когда рулевое колесо поворачивается влево энергией остаточного перекоса. Другими словами, пороговое значение θth устанавливается в значение, которое может не допускать отмену режима парковки. Отметим, что, если рулевое колесо поворачивается влево от граничного значения -α, выбор режима парковки может выполняться повторно. А именно, есть гистерезис между входом в и выходом из диапазона угла поворота для установки режима парковки.
Здесь вышеупомянутый гистерезис будет пояснен со ссылкой на фиг. 26. Как показано на фиг. 26, углу θ поворота необходимо быть -α<θ для выбора режима парковки, а затем, углу поворота необходимо быть θth<θ<+α для установки выбранного режима парковки. В дополнение, в случае, когда режим парковки уже был установлен и должно быть сделано повторное выполнение выбора режима парковки, углу θ поворота вновь нужно быть -α<θ. Отметим, что, хотя только операция рулевого управления влево показана на фиг. 25 и 26, подобное управление выполняется симметрично для направленной вправо операции.
Кроме того, как пояснено выше по тексту, крутящий момент, вызванный энергией остаточного перекоса, изменяется согласно максимальному значению угла θ поворота во время выбора режима парковки. Поэтому, пороговое значение θth может изменяться согласно максимальному углу θmax поворота (>0: абсолютному значению угла). Посредством изменения порогового значения θth согласно максимальному углу θmax поворота, проблема, вызванная энергией остаточного перекоса, может избегаться более адекватно. Более точно, пороговое значение θth делается более близким к нейтральному положению, когда максимальный угол θmax поворота велик, и пороговое значение θth делается более близким к граничному значению ±α диапазона установки режима парковки, когда максимальный угол θmax поворота мал.
Более того, в случае, когда пороговое значение θth изменяется, ширина диапазона установки режима парковки может делаться всегда постоянной посредством изменения граничного значения +α противоположной стороны согласно величине изменения порогового значения θth. Отметим, что максимальный угол θmax поворота в последующем пояснении включает в себя информацию о своем направлении Pmem управления рулем.
[Процесс выбора режима парковки]
Конфигурации устройства 1 выбора режима парковки в настоящем варианте осуществления идентичны таковым в первом варианте осуществления. Процесс выбора режима парковки устройством 1 выбора режима парковки в настоящем варианте осуществления будет пояснен со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 27.
Как показано на фиг. 27, она идет к выбору режима парковки, и максимальный угол θmax поворота регистрируется во время выбора режима парковки (этап S701). Отметим, что, поскольку выбор режима парковки пояснен в вышеприведенных вариантах осуществления, его подробное описание здесь опущено (смотрите фиг. 6 и 19, и так далее). В дополнение, поскольку регистрация максимального угла θmax поворота также пояснена в приведенных выше по тексту вариантах осуществления, ее подобное пояснение здесь опущено (смотрите фиг. 14 и так далее).
Затем извлекается заранее заданная таблица, или тому подобное, а затем, пороговое значение θth (<0 или >0 в зависимости от направления вращения) и абсолютное граничное значение α (>0) диапазона установки режима парковки устанавливаются на основании зарегистрированного максимального угла θmax поворота (этап S702). Установка порогового значения θth и абсолютного граничного значения α выполняется блоком 4 выбора режима парковки. Отметим, что абсолютное граничное значение α здесь устанавливается переменным образом, но может быть установлено в качестве постоянного значения так, как в вышеприведенных вариантах осуществления. В дополнение, как уже пояснено, может изменяться только граничное значение противоположной стороны +α (или -α).
Оценивается, становится или нет угол θ поворота более близким к нейтральному положению, чем пороговое значение θth (|θ|<θth) (этап S703). Если |θ|<θth не выполняется (Нет на этапе S703), его поток обработки возвращается на этап S701, так как он находится во время выбора режима парковки. С другой стороны, если |θ|<θth (Да на этапе S703), режим парковки устанавливается, а затем оценивается, зафиксирован или нет режим парковки, который был установлен, блоком 4 выбора режима парковки (этап S704). Как пояснено выше по тексту, режим парковки, который был установлен, фиксируется, когда водитель убирает его/ее ступню с тормозной педали. Отметим, что фиксация режима парковки может выполняться водительским нажатием кнопки фиксации, или запускаться регистрацией начала движения транспортного средства (результат регистрации датчика ходового колеса указывает скорость 0km/h транспортного средства).
Если режим парковки зафиксирован (Да на этапе S704), блок 4 выбора режима парковки отправляет флаг фиксации режима парковки в блок 5 вычисления режима парковки (этап S705), и затем, процесс выбора режима парковки заканчивается. Блок 5 вычисления режима парковки вычисляет траекторию парковки в целевое положение парковки на основании фиксированного режима парковки и отправляет вычисленную траекторию парковки в блок 3 наложения режима парковки, и управляет блоком 10 парковочного маневра через контроллер 9 парковочного маневра на основании вычисленной траектории парковки. С другой стороны, если режим парковки не зафиксирован (Нет на этапе S704), оценивается, выходит или нет угол поворота из диапазона установки режима парковки (|θ|≥α?) (этап S706).
Если |θ|≥α (Да на этапе S706), поток обработки возвращается на этап S701, для того чтобы повторно выполнить выбор режима парковки. С другой стороны, если |θ|≥α не выполняется (Нет на этапе S706), поток обработки возвращается на этап S704, причем, поддерживается режим парковки, который был установлен, так как режим парковки, который был установлен, не зафиксирован, и поток обработки зацикливается до тех пор, пока режим парковки не зафиксирован.
[Преимущества согласно шестому варианту осуществления]
Согласно устройству выбора режима парковки в поясненном выше по тексту шестом варианте осуществления, пороговое значение θth устанавливается в пределах диапазона установки режима парковки, и режим парковки устанавливается при прохождении через пороговое значение θth.
Поэтому, предотвращается, что рулевое колесо возвращается в диапазон выбора режима парковки вследствие энергии остаточного перекоса шин, так что установка режима парковки может выполняться безотказно.
Пояснение будет сделано со ссылкой на фиг. 28. Как показано на фиг. 28, водитель начинает поворачивать рулевое колесо влево (θ<0°) в момент t1 времени и рулит им до приблизительно -90° в момент t2 времени. Затем водитель начинает поворачивать рулевое колесо вправо в момент t3 времени и возвращает его в нейтральное положение (θ=0°) в момент t4 времени. Затем, водитель снимает его/ее руки с рулевого колеса в момент t5 времени, так что рулевое колесо возвращается на Δθ вследствие энергии остаточного перекоса шин.
В этот момент угол θ поворота остается в пределах диапазона (-α<θ<α) установки режима парковки, даже если рулевое колесо возвращается вследствие энергии остаточного перекоса, посредством установки порогового значения θth так, чтобы угловое расхождение (α+θth) между граничным значением -α и пороговым значением θth (<θ) делалось большим, чем Δθ, так что оно предохраняется от самостоятельного выхода из диапазона установки режима парковки.
В дополнение, режим парковки может устанавливаться более адекватно, согласно абсолютной величине энергии остаточного перекоса, посредством изменения порогового значения θth согласно максимальному углу θmax поворота (то есть, посредством приближения порогового значения θth к нейтральному положению, когда максимальный угол θmax поворота велик, и приближения порогового значения θth к граничному значению ±α, когда максимальный угол θmax поворота мал).
В дополнение, диапазон установки режима парковки может делаться всегда постоянным посредством изменения граничного значения ±α противоположной стороны согласно максимальному углу θmax поворота.
В дополнение делается, чтобы возникал гистерезис, посредством проведением различия порогового значения θth для установки режима парковки из диапазона установки режима парковки от граничного значения ±α из диапазона установки режима парковки по отношению к диапазону выбора режима парковки. Поэтому, даже если рулевое колесо направляется назад энергией остаточного перекоса, оно предохраняется от направления обратно в диапазон выбора режима парковки и, тем самым, режим парковки может устанавливаться безотказно.
<Седьмой вариант осуществления>
Ниже седьмой вариант осуществления будет пояснен со ссылкой на фиг. 29. Отметим, что конфигурации устройства 1 выбора режима парковки в настоящем варианте осуществления идентичны таковым в первом варианте осуществления (то есть, шестом варианте осуществления). В дополнение, конфигурации, идентичные или подобные таковым в поясненных выше по тексту с первого по шестой вариантах осуществления, помечены идентичными номерами, а их подробные пояснения опущены. Но, датчик 8 рулевого управления в настоящем варианте осуществления может регистрировать крутящий момент, прикладывающийся к валу рулевого управления, в дополнение к углу θ поворота. Отметим, что датчик 8 рулевого управления может быть разделен на датчик угла поворота для регистрации угла θ поворота и датчик крутящего момента для регистрации крутящего момента. В настоящем варианте осуществления, поясненное выше по тексту пороговое значение θth не устанавливается, а регистрируется крутящий момент, прикладывающийся к валу рулевого управления. Выносится суждение, что водитель отпускает его/его руки с рулевого колеса, если этот крутящий момент является меньшим, чем предопределенное значение, в течение некоторого периода времени и, в силу этого, режим парковки устанавливается на основании угла поворота перед их отпусканием.
[Процесс выбора режима парковки]
Процесс выбора режима парковки устройством 1 выбора режима парковки в настоящем варианте осуществления будет пояснена со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 29.
Как показано на фиг. 29, она идет к выбору режима парковки, и максимальный угол θmax поворота регистрируется во время выбора режима парковки (этап S801). Отметим, что поскольку выбор режима парковки пояснен в вышеприведенных вариантах осуществления, его подробное описание здесь опущено (смотрите фиг. 6 и 19, и так далее). В дополнение, поскольку регистрация максимального угла θmax поворота также пояснена в приведенных выше по тексту вариантах осуществления, ее подобное пояснение здесь опущено (смотрите фиг. 14, и так далее).
Как упомянуто выше по тексту, пороговое значение θth не устанавливается в представленном варианте осуществления, режим парковки устанавливается на основании диапазона (-α<θ<+α) установки режима парковки, подобного таковому в вариантах осуществления с первого по пятый. Поэтому, оценивается, находится или нет угол θ поворота в диапазоне (-α<θ<+α) установки режима парковки (этап S802). Если не в -α<θ<+α (Нет на этапе S802), режим парковки не устанавливается, и его поток обработки возвращается на этап S801 для обновления максимального угла θmax поворота.
С другой стороны, если в -α<θ<+α (Да на этапе S802), поток обработки переходит к установке режима парковки (этап S803). В это время представление для указания, что режим парковки будет устанавливаться, может отображаться на устройстве 7 отображения.
После перехода к установке режима парковки, оценивается, является или нет значение крутящего момента меньшим, чем предопределенное значение, в течение некоторого периода времени (этап S804). Если значение крутящего момента не является меньшим, чем предопределенное значение в течение некоторого периода времени (Нет на этапе S804), может выноситься суждение, что водитель все еще удерживает рулевое колесо и, в силу этого, поток обработки возвращается на этап S802, чтобы повторить оценку, находится или нет в диапазоне установки режима парковки.
С другой стороны, если значение крутящего момента является меньшим, чем предопределенное значение в течение некоторого периода времени (Да на этапе S804), может выноситься суждение, что водитель убирает его/ее руки с рулевого колеса, в этом случае рулевое колесо может поворачиваться самостоятельно вследствие энергии остаточного перекоса шин, как пояснено выше по тексту. Поэтому, выполняется компенсация согласно углу θ поворота в момент времени, когда рулевое колесо отпущено.
В настоящем варианте осуществления угол θ поворота компенсируется, как пояснено ниже по тексту. Угол θ поворота в момент времени (например, момент t5 времени на фиг. 28), возвращенный от момента времени, когда этап S804 утвердителен (момент t6 времени на фиг. 28), через предопределенную временную длительность (временную длительность Δt на фиг. 28), обрабатывается в качестве компенсированного угла θ поворота. Посредством использования угла θ поворота в предыдущий момент t5 времени, расхождение Δθ угла поворота, принудительно поворачиваемое вследствие энергии остаточного перекоса, может компенсироваться.
В настоящем варианте осуществления оценивается, находится или нет компенсированный угол поворота в диапазоне (-α<θ<+α) установки режима парковки (этап S806). Если не в пределах -α<(компенсированный θ)<+α (Нет на этапе S806), выносится суждение, что водитель поворачивает рулевое колесо не вследствие энергии остаточного перекоса и, в силу этого, поток обработки возвращается на этап S801, для того чтобы повторно выполнить выбор режима парковки.
С другой стороны, если в пределах -α<(компенсированный θ)<+α (Да на этапе S806), устанавливают режим парковки, и вне зависимости от того был или нет установлен режим парковки, его фиксируют блоком 4 выбора режима парковки (этап S807). Как пояснено выше по тексту, режим парковки, который был установлен, фиксируется, когда водитель убирает его/ее ступню с тормозной педали. Отметим, что фиксация режима парковки может выполняться водительским нажатием кнопки фиксации, или запускаться регистрацией начала движения транспортного средства (результат регистрации датчика ходового колеса указывает скорость 0km/h транспортного средства).
Если режим парковки зафиксирован (Да на этапе S807), блок 4 выбора режима парковки отправляет флаг фиксации режима парковки в блок 5 вычисления режима парковки (этап S808), и затем процесс выбора режима парковки заканчивается. Блок 5 вычисления режима парковки вычисляет траекторию парковки в целевое положение парковки на основании фиксированного режима парковки и отправляет вычисленную траекторию парковки в блок 3 наложения режима парковки, и управляет блоком 10 парковочного маневра через контроллер 9 парковочного маневра на основании вычисленной траектории парковки. С другой стороны, если режим парковки не зафиксирован (Нет на этапе S704), оценивается, выходит или нет угол поворота из диапазона установки режима парковки (|θ|≥α?) (этап S809).
Если |θ|>α (Да на этапе S809), поток обработки возвращается на этап S801, для того чтобы повторно выполнить выбор режима парковки. С другой стороны, если |θ|≥α не выполняется (Нет на этапе S809), поток обработки возвращается на этап S807, причем поддерживается режим парковки, который был установлен, так как режим парковки, который был установлен, не зафиксирован, и поток обработки зацикливается до тех пор, пока режим парковки не зафиксирован.
[Преимущества согласно седьмому варианту осуществления]
Согласно устройству выбора режима парковки в поясненном выше по тексту седьмом варианте осуществления, режим парковки устанавливается, когда крутящий момент вала рулевого управления является равным или меньшим, чем предопределенное значение, то есть, водитель убирает его/ее руки с рулевого колеса, так что режим парковки может устанавливаться более адекватно.
В дополнение, в этот момент времени, поскольку оценивается, находится или нет в диапазоне установки режима парковки на основании компенсированного угла θ поворота со значением до предопределенной временной длительности Δt, расхождение Δθ угла поворота, принудительно поворачиваемое вследствие энергии остаточного перекоса, может компенсироваться и, тем самым, режим парковки может устанавливаться более адекватно.
<Восьмой вариант осуществления>
Ниже будет пояснен восьмой вариант осуществления. Конфигурации устройства 1 выбора режима парковки в настоящем варианте осуществления идентичны таковым в первом варианте осуществления (то есть, седьмом варианте осуществления). В дополнение, конфигурации, идентичные или подобные таковым в поясненных выше по тексту с первого по седьмой вариантах осуществления, помечены идентичными номерами, а их подробные пояснения опущены. Отметим, что блок 5 вычисления режима парковки в настоящем варианте осуществления снабжен функцией фильтрации (например, фильтр диапазона нижних частот) и фильтрует изменение угла θ поворота. Более точно, он фильтрует изменение угла θ поворота в течение предопределенной временной длительности (например, временной длительности Δt на фиг. 28) до момента времени, когда крутящий момент вала рулевого управления становится равным или меньшим, чем предопределенное значение на определенный период времени (момент t6 времени на фиг. 28), а затем, оценивается, находится или нет угол θ поворота, который был отфильтрован и затем компенсирован, в диапазоне (-α<θ<+α) установки режима парковки.
[Процесс выбора режима парковки]
Блок-схема последовательности операций способа для процесса выбора режима парковки устройством 1 выбора режима парковки в настоящем варианте осуществления идентична блок-схеме процесса способа на фиг. 29. Однако, как пояснено выше по тексту, является отличным только содержание компенсации угла θ поворота на этапе S805. Поэтому, будет подробно пояснен только этап S805.
На этапе S805 в настоящем варианте осуществления, блок 5 вычисления режима парковки фильтрует данные временной последовательности в течение предопределенной временной длительности (например, временной длительности Δt на фиг. 28) до момента времени, когда утвердителен этап S804 (момента t6 времени на фиг. 28). Как результат, частота среза и коэффициент усиления получаются посредством использования постоянной времени, вычисленной по скорости изменения угла θ поворота в течение временной длительности Δt на фиг. 28. Затем, оценка на этапе S806 выполняется на основании угла θ поворота, компенсированного благодаря фильтрации.
[Преимущества согласно восьмому варианту осуществления]
Согласно устройству выбора режима парковки в поясненном выше по тексту восьмом варианте осуществления, фильтрация выполняется в отношении изменения угла θ поворота в течение предопределенной временной длительности Δt до момента времени, когда крутящий момент вала рулевого управления становится равным или меньшим, чем предопределенное значение. В таком случае, поскольку оценивается, находится или нет в диапазоне установки режима парковки на основании компенсированного угла θ поворота благодаря фильтрации, расхождение Δθ угла поворота, принудительно поворачиваемое вследствие энергии остаточного перекоса, может компенсироваться и, тем самым, режим парковки может устанавливаться более соразмерно.
Все содержание заявки № 2010-132028 на выдачу патента Японии (поданной 9 июня 2010 года), заявки № 2010-132037 на выдачу патента Японии (поданной 9 июня 2010 года) и заявки № 2010-132055 на выдачу патента Японии (поданной 9 июня 2010 года) включено в материалы настоящей заявки посредством ссылки. Хотя изобретение было описано выше по тексту посредством ссылки на некоторые варианты осуществления, изобретение не ограничено вариантами осуществления, описанными выше по тексту. Объем настоящего изобретения определен в контексте формулы изобретения.
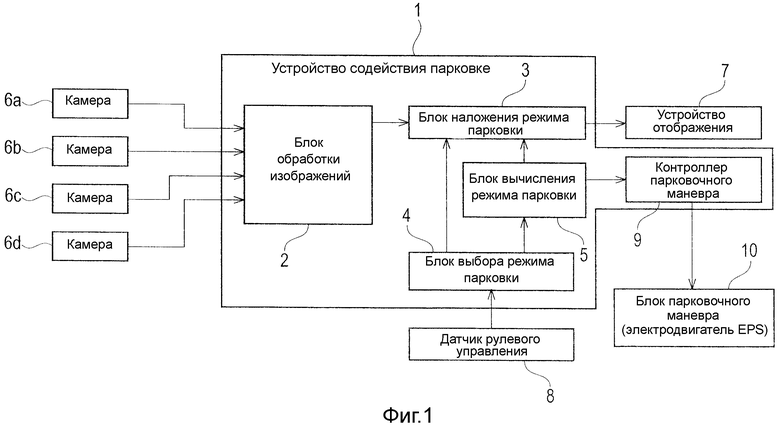
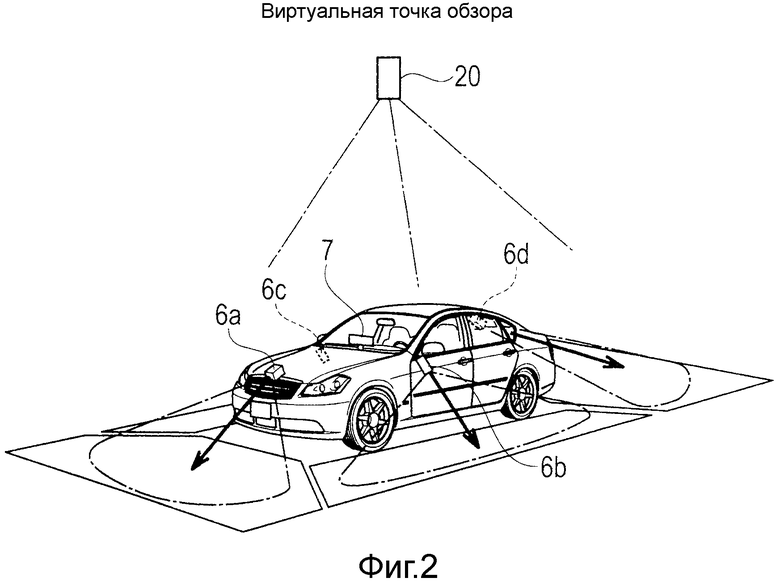
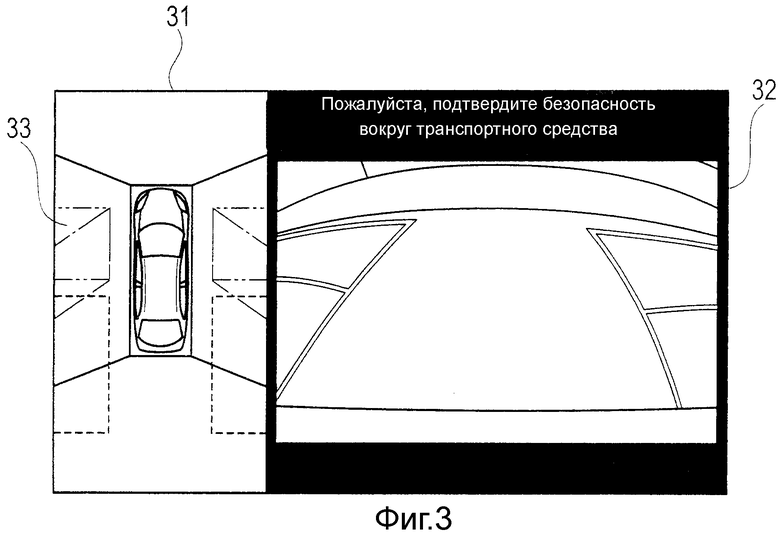
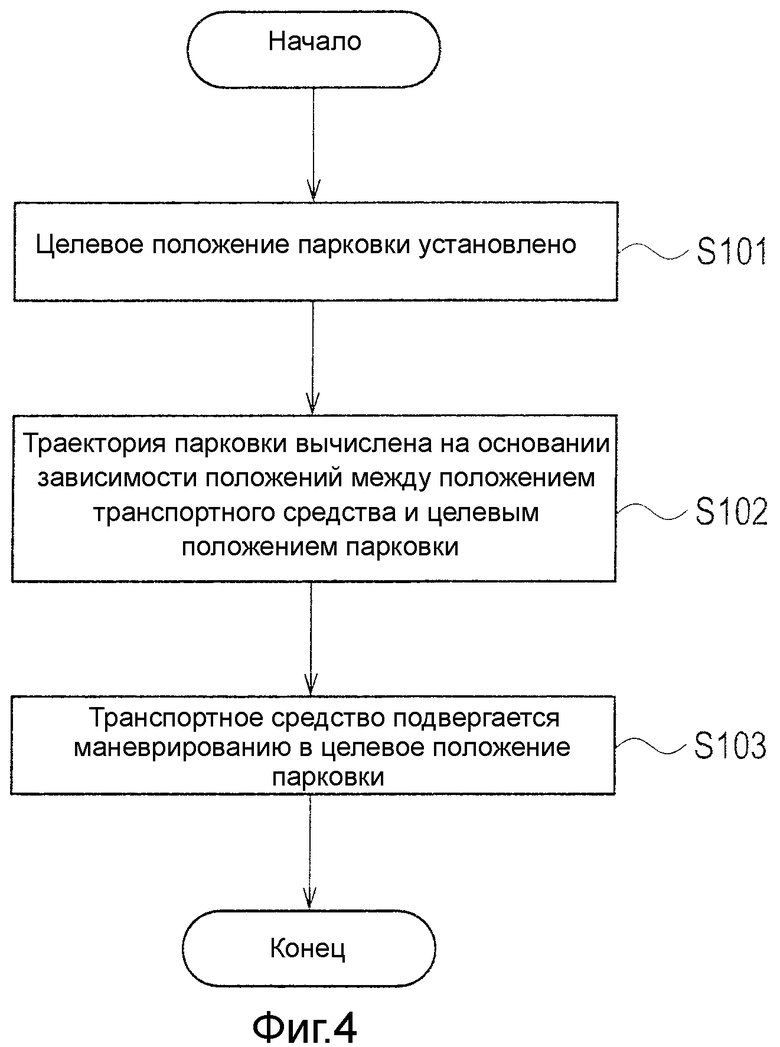
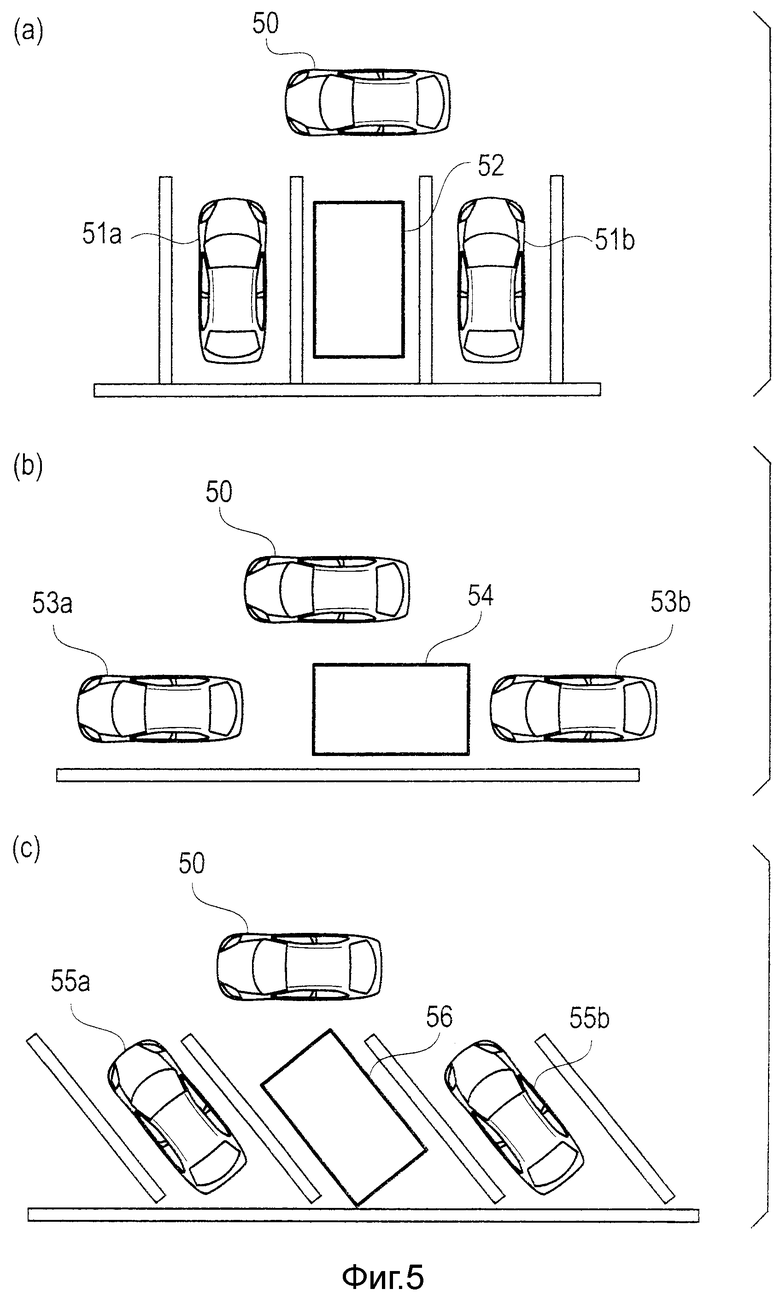
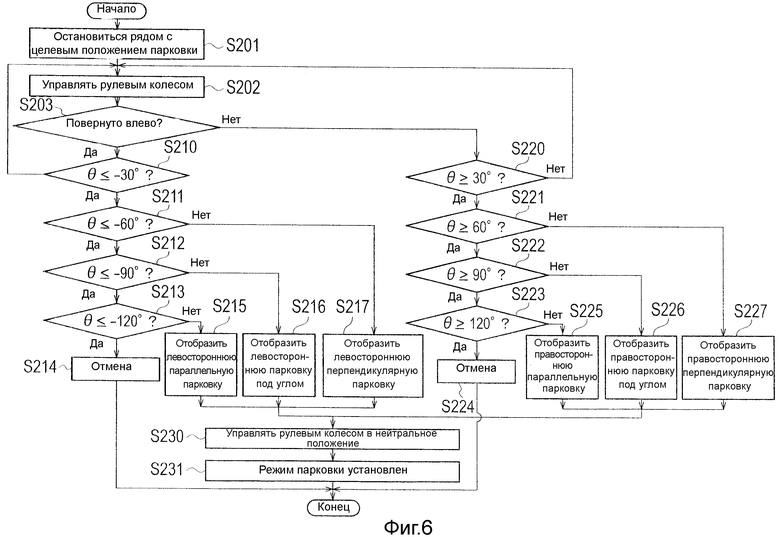
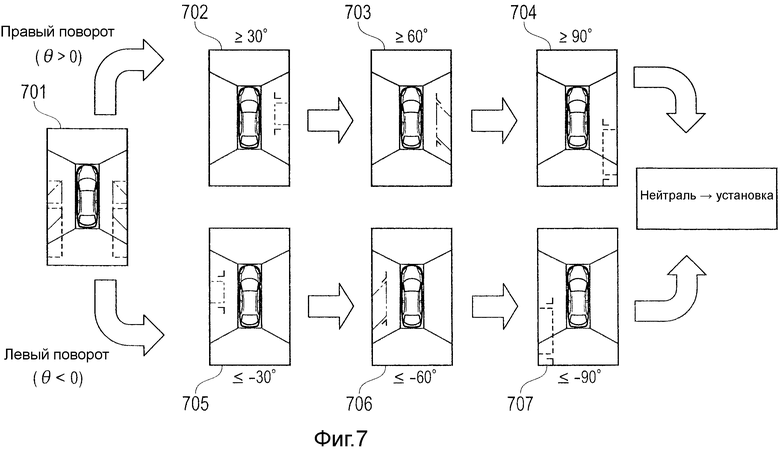
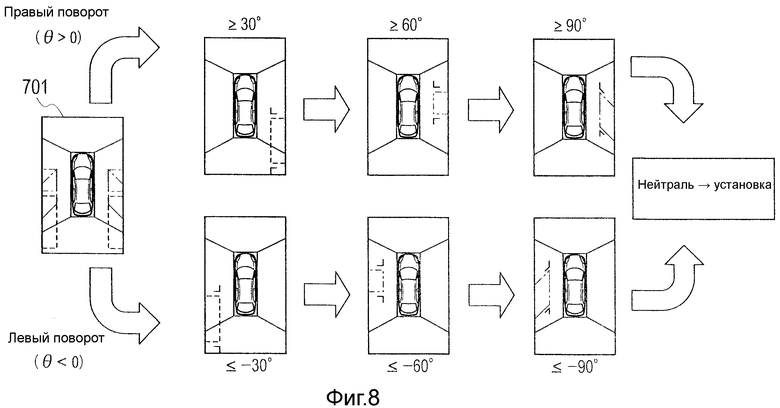
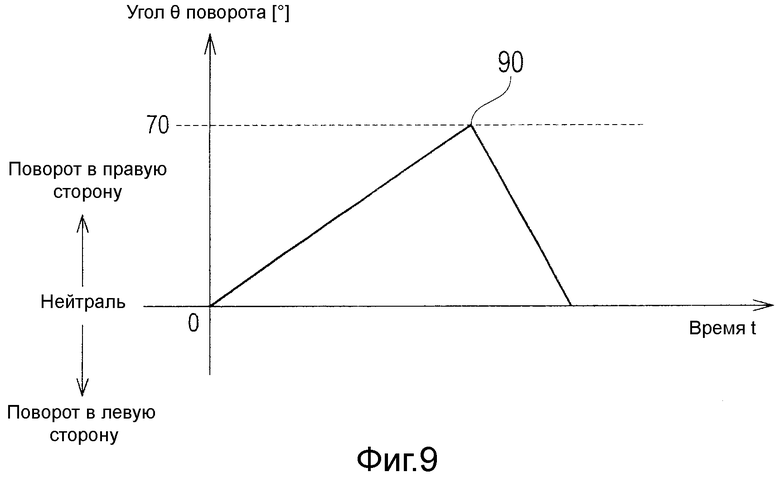
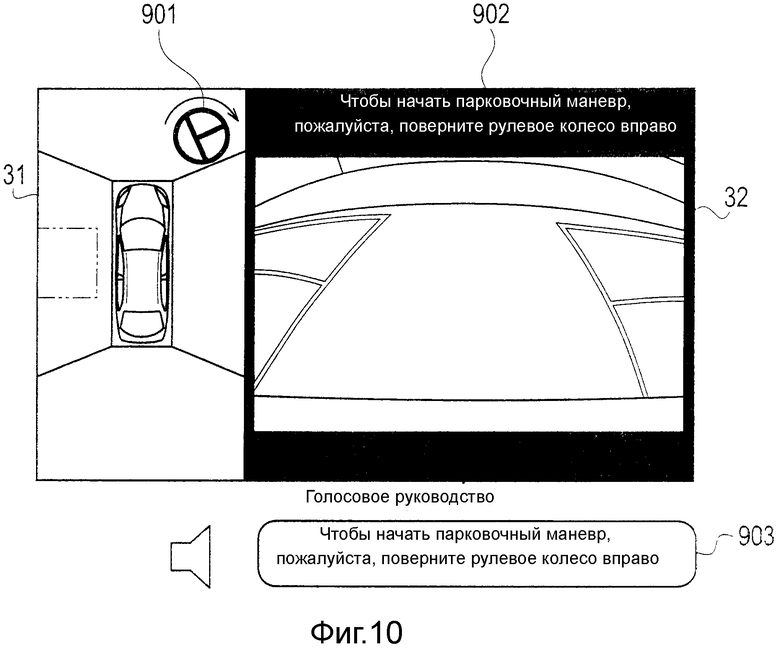
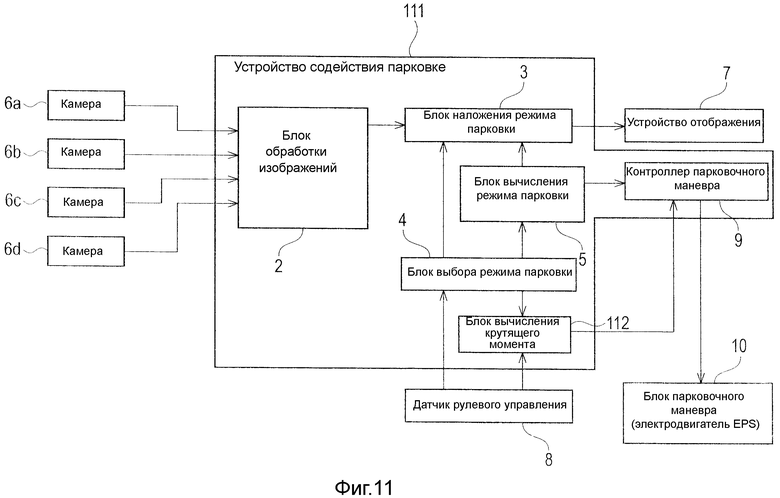
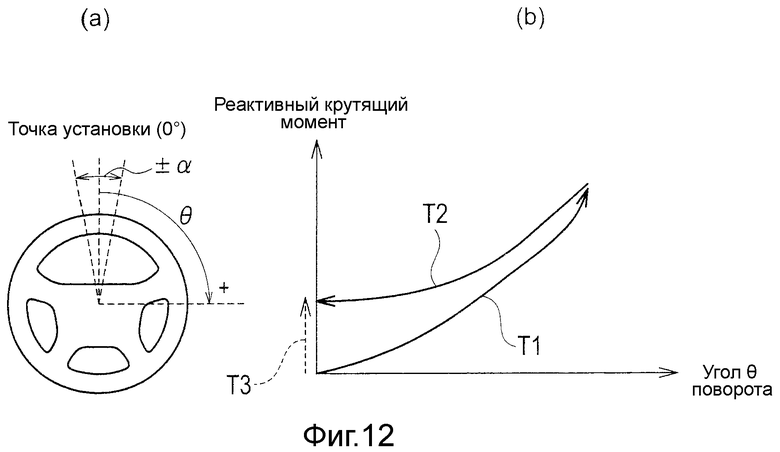
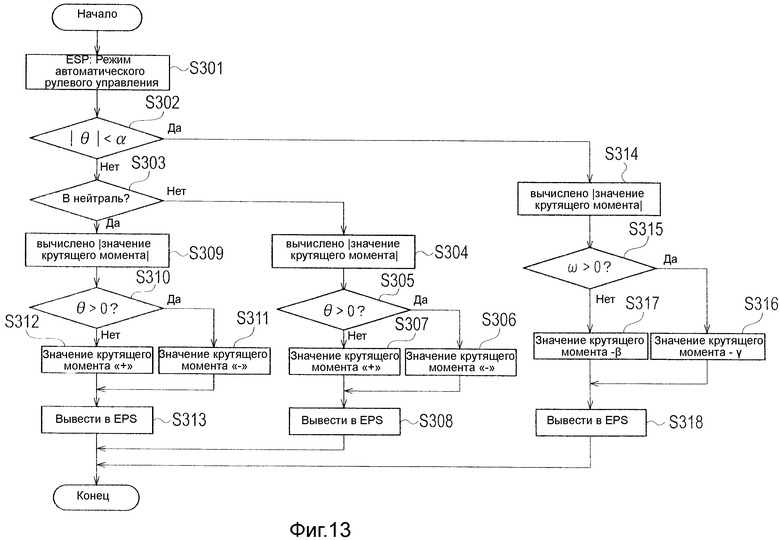
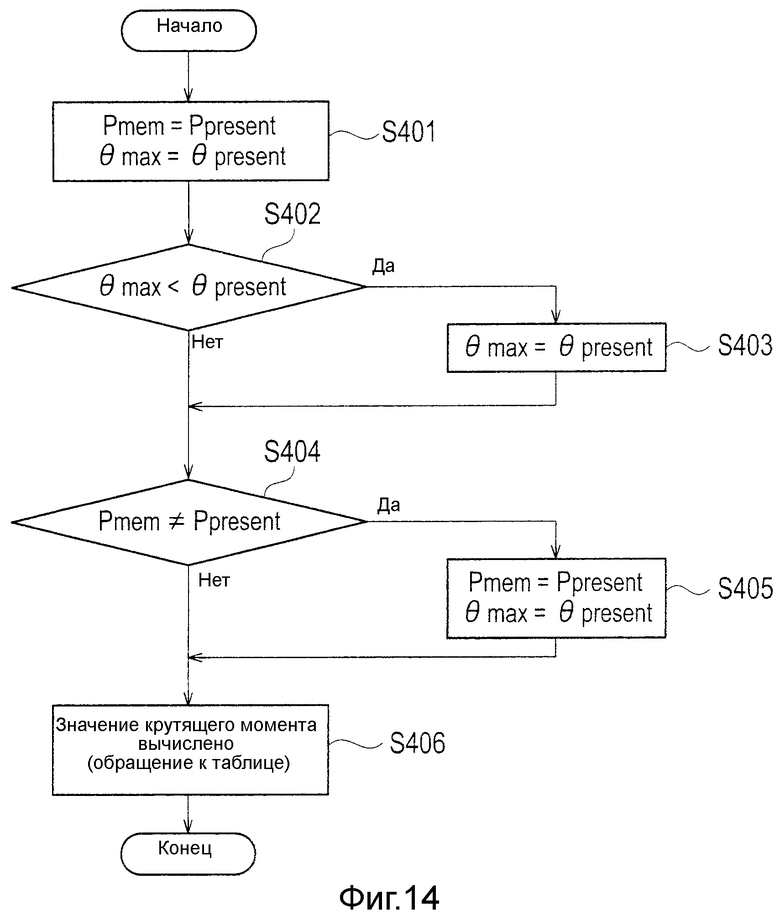
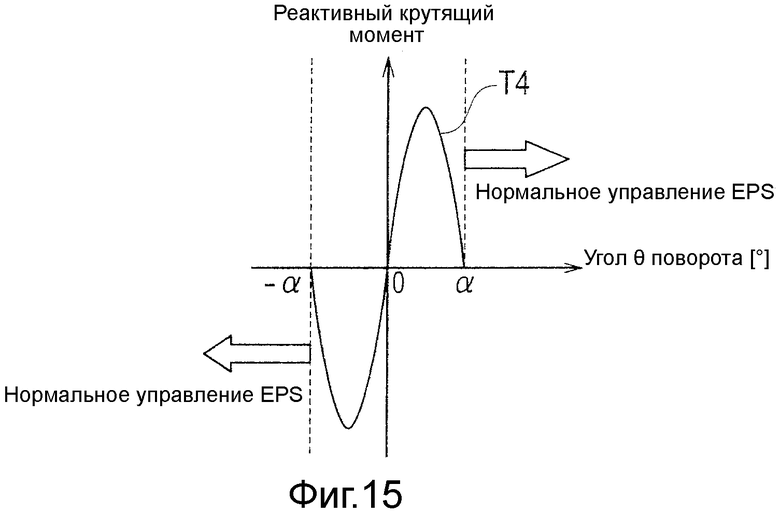
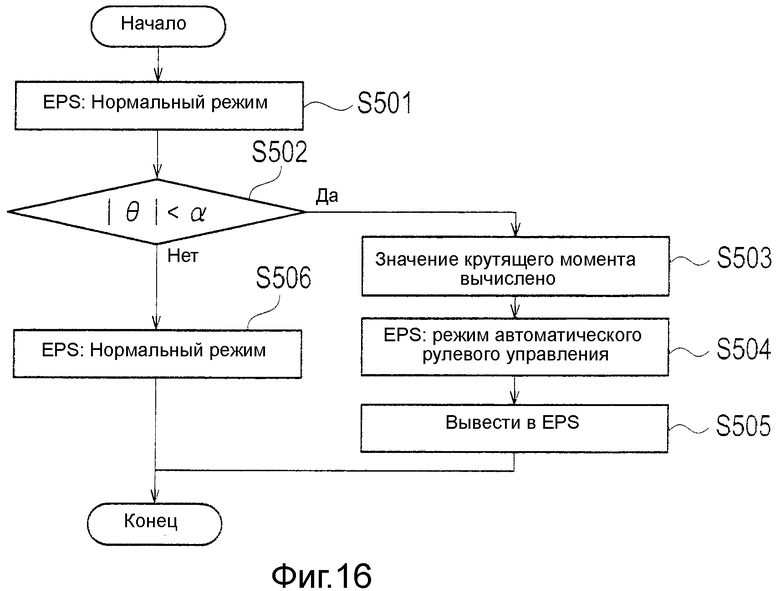
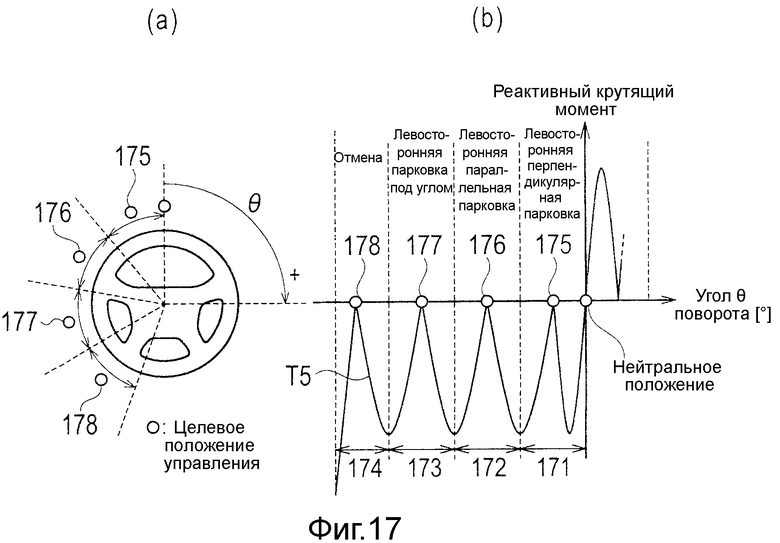
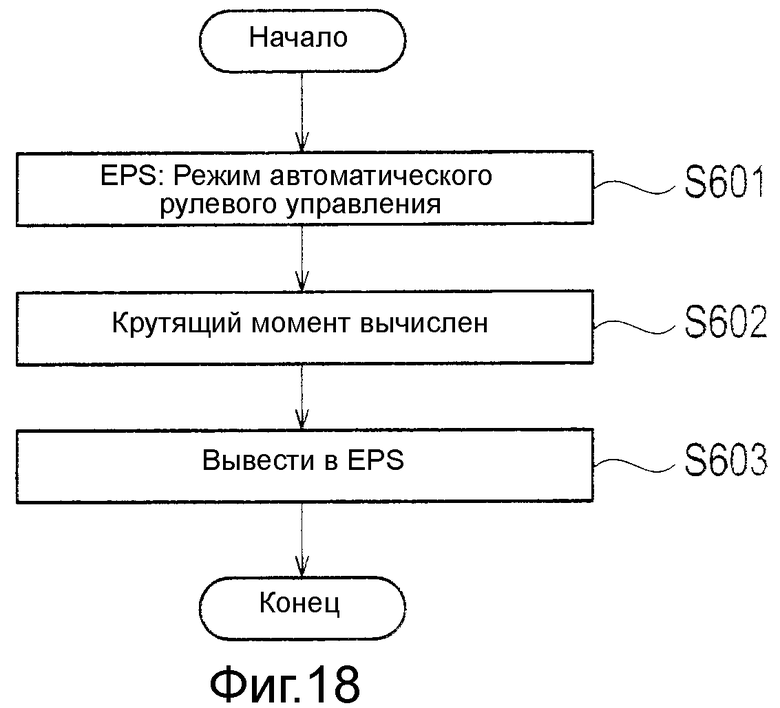
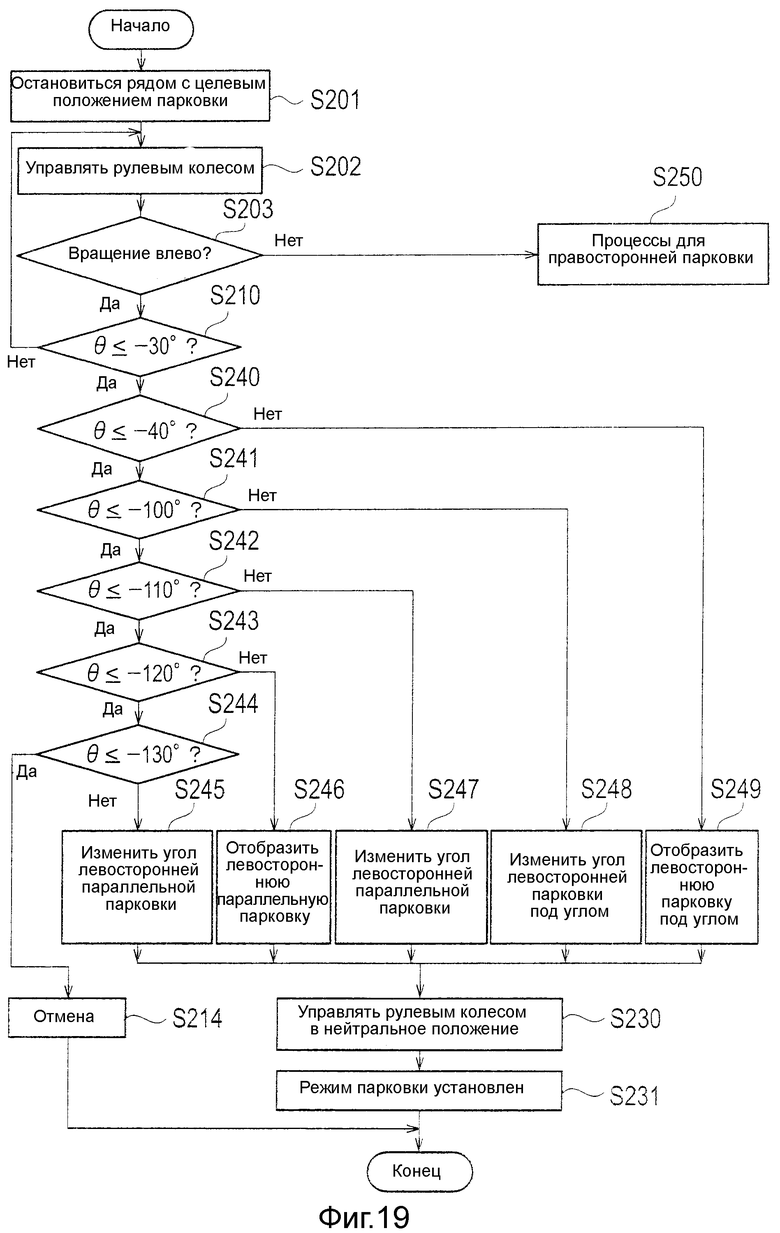
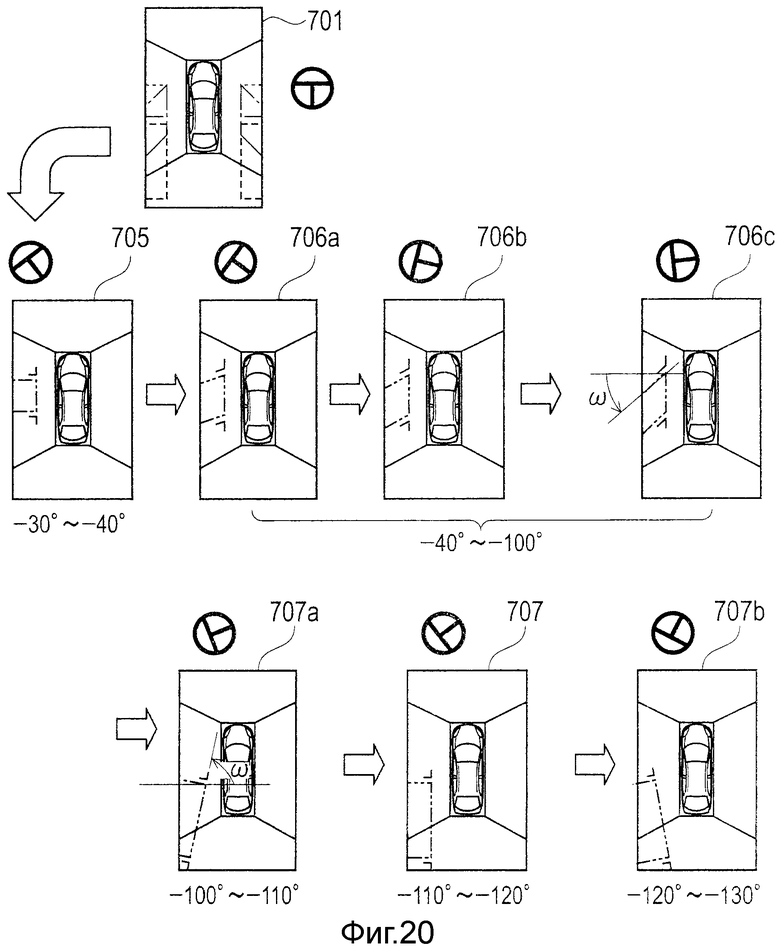
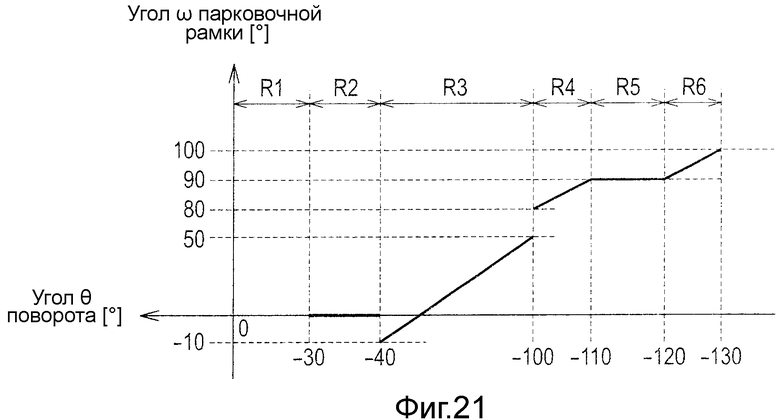
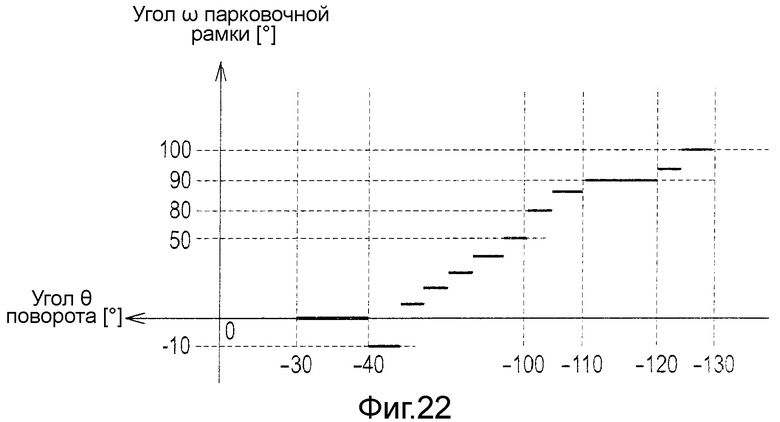
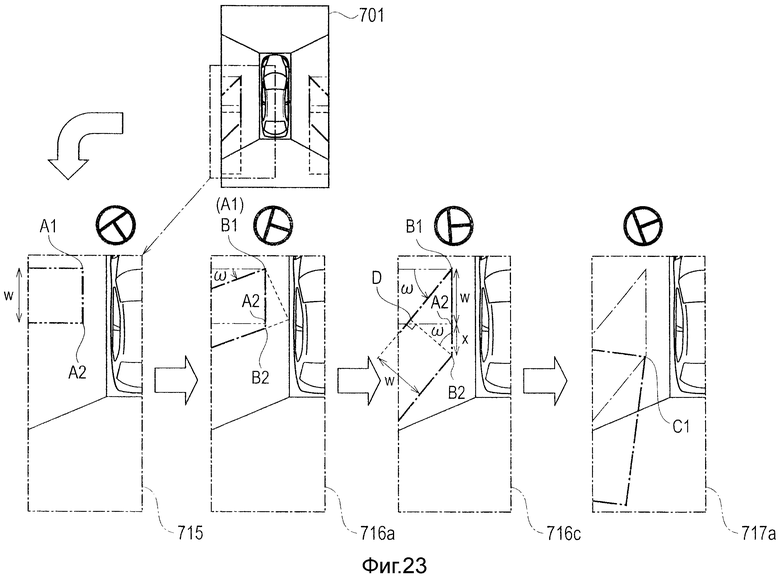
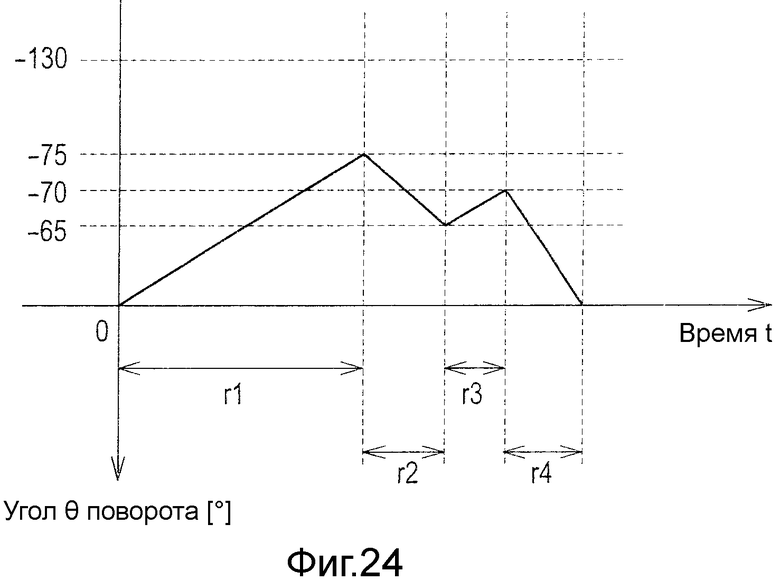
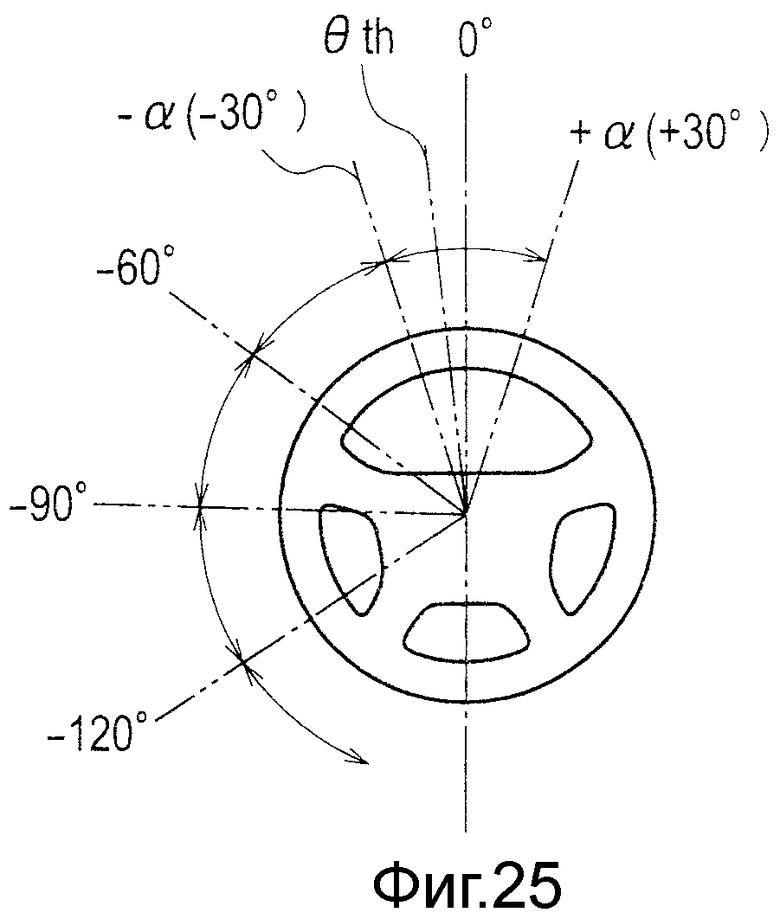
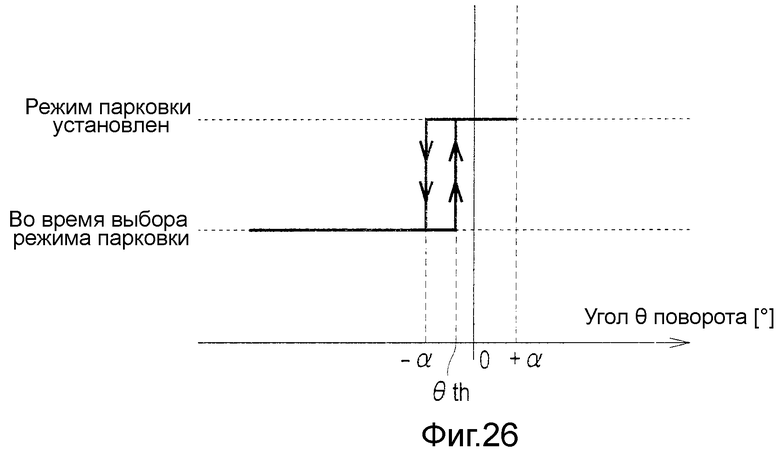
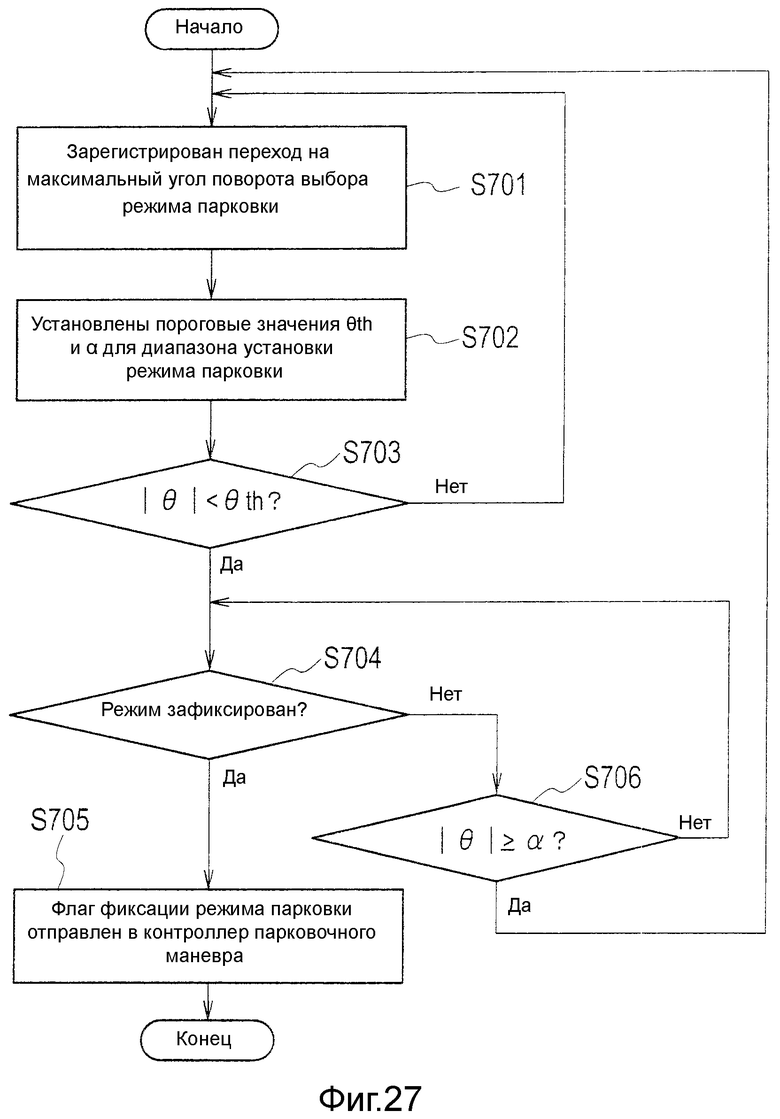
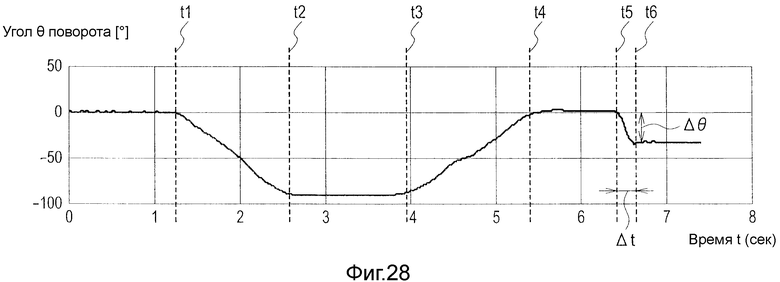
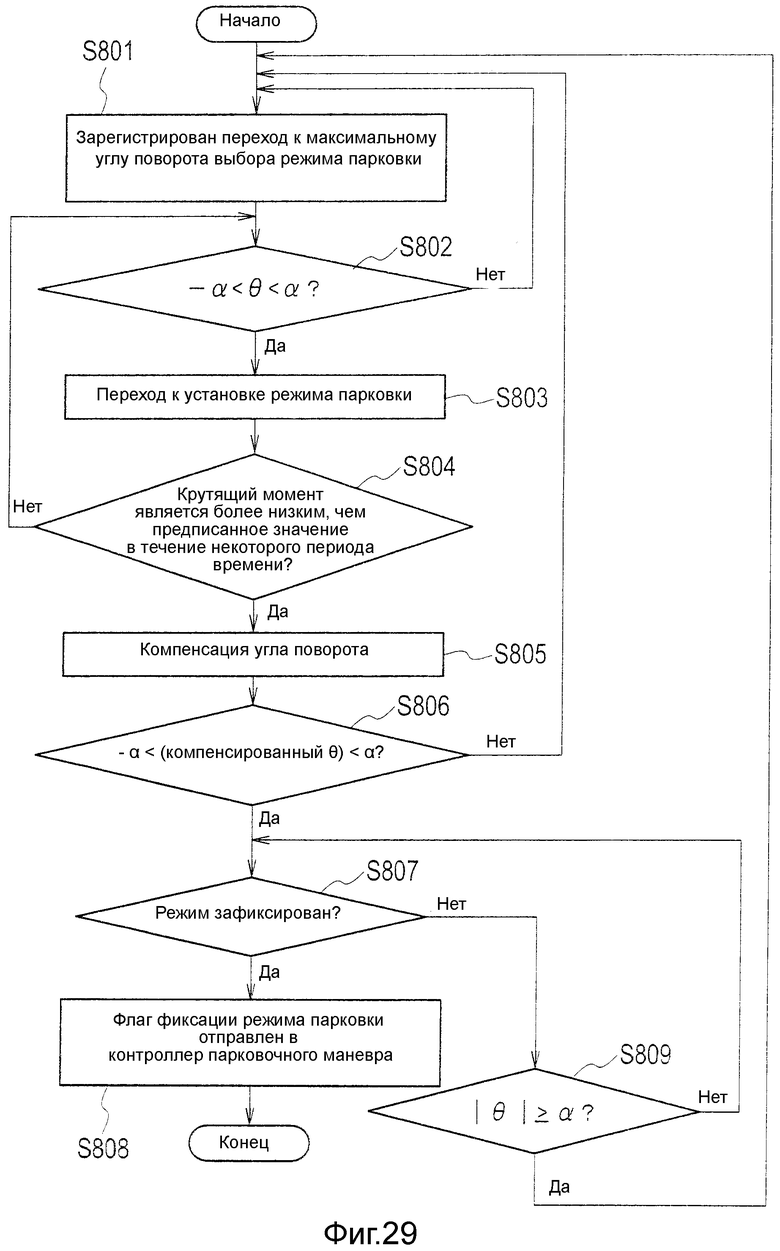
Группа изобретений относится к вариантам выполнения устройства выбора режима парковки и способу выбора режима парковки. Устройство по первому варианту содержит блок регистрации угла поворота, блок регистрации операции, в которой рулевое колесо возвращается в нейтральное положение после поворота вправо или влево, блок выбора режима парковки. Устройство по второму варианту содержит средство регистрации угла поворота, средство регистрации операции, в которой рулевое колесо возвращается в нейтральное положение после того, как поворачивалось вправо или влево, и средство выбора режима парковки. Способ заключается в том, что регистрируют угол поворота рулевого колеса, регистрируют операцию, в которой рулевое колесо возвращается в нейтральное положение после поворота вправо или влево, выбирают один режим парковки по правую сторону транспортного средства или левую сторону транспортного средства из множества режимов парковки. Технический результат заключается в упрощении установки целевого положения парковки. 3 н. и 18 з.п. ф-лы, 29 ил.
1. Устройство выбора режима парковки для выбора одного режима парковки из множества режимов парковки, включающих в себя по меньшей мере перпендикулярную парковку и параллельную парковку, причем устройство содержит блок регистрации угла поворота, который регистрирует угол поворота рулевого колеса; блок регистрации операции, который регистрирует, на основании угла поворота, зарегистрированного блоком регистрации угла поворота, предопределенную операцию, в которой рулевое колесо возвращается в нейтральное положение после поворота вправо или влево, и блок выбора режима парковки, который выбирает, когда предопределенная операция зарегистрирована блоком регистрации операции, один режим парковки по правую сторону транспортного средства или левую сторону транспортного средства, который соответствует направлению управления рулем вправо или влево угла поворота, зарегистрированного блоком регистрации угла поворота в предопределенной операции, и ассоциативно связан с углом поворота в предопределенной операции, из множества режимов парковки.
2. Устройство выбора режима парковки по п.1, дополнительно содержащее блок вывода руководства, который выводит, когда рулевое колесо возвращается в нейтральное положение, руководство на экране отображения или голосовое руководство для побуждения осуществить возврат рулевого колеса в нейтральное положение.
3. Устройство выбора режима парковки по п.2, дополнительно содержащее генератор крутящего момента, который генерирует, когда рулевое колесо возвращается в нейтральное положение, крутящий момент по направлению к нейтральному положению на рулевом колесе.
4. Устройство выбора режима парковки по п.3, в котором генератор крутящего момента генерирует крутящий момент по направлению к нейтральному положению только в пределах предопределенного диапазона, близкого к нейтральному положению.
5. Устройство выбора режима парковки по п.1, в котором множество режимов парковки включает в себя перпендикулярную парковку на правой или левой сторонах, парковку под углом на правой и левой сторонах и параллельную парковку на правой и левой сторонах.
6. Устройство выбора режима парковки по п.1, в котором множество режимов парковки дополнительно включает в себя парковку под углом, устройство выбора режима парковки дополнительно содержит устройство отображения для представления режима парковки, который выбирается, на киноизображении вида сверху, включающем в себя окружающую среду транспортного средства, и блок выбора режима парковки представляет, в то время как парковка под углом выбирается в качестве режима парковки, режим парковки для парковки под углом на устройстве отображения наряду с изменением угла парковки согласно углу поворота, зарегистрированному блоком регистрации угла поворота.
7. Устройство выбора режима парковки по п.6, в котором блок выбора режима парковки делает направление управления рулем угла поворота совпадающим с измененным направлением угла парковки.
8. Устройство выбора режима парковки по п.7, в котором блок выбора режима парковки представляет, в то время как параллельная парковка выбирается в качестве режима парковки, режим парковки для параллельной парковки на устройстве отображения наряду с изменением угла парковки согласно углу поворота, зарегистрированному блоком регистрации угла поворота.
9. Устройство выбора режима парковки по п.6, в котором изменение угла парковки представляется на устройстве отображения пошаговым образом согласно углу поворота.
10. Устройство выбора режима парковки по п.6, в котором блок выбора режима парковки переключает, при переключении режима парковки с парковки под углом на параллельную парковку на устройстве отображения, режим парковки посредством совмещения одной вершины парковочной рамки, указывающей режим парковки для парковки под углом, с одной вершиной парковочной рамки, указывающей режим парковки для параллельной парковки.
11. Устройство выбора режима парковки по п.1, в котором устанавливается диапазон угла поворота установки режима парковки, который включает в себя нейтральное положение и диапазоны угла поворота выбора режима парковки, которые соответственно ассоциативно связаны с режимами парковки, блок выбора режима парковки устанавливает пороговое значение в пределах диапазона угла поворота установки режима парковки и на стороне направления управления рулем относительно нейтрального положения, и блок регистрации операции регистрирует предопределенную операцию, когда рулевое колесо возвращается внутрь диапазона угла поворота установки режима парковки, а затем проходит пороговое значение.
12. Устройство выбора режима парковки по п.11, в котором блок выбора режима парковки изменяет пороговое значение согласно максимальному значению угла поворота, в то время как выбирается режим парковки.
13. Устройство выбора режима парковки по п.11, в котором после того как блок регистрации операции регистрирует предопределенную операцию, когда рулевое колесо возвращается внутрь диапазона угла поворота установки режима парковки, а затем проходит пороговое значение и, затем, когда рулевое колесо вновь поворачивается и угол поворота входит в диапазоны угла поворота выбора режима парковки вне диапазона угла поворота установки режима парковки, блок выбора режима парковки может выбирать режим парковки еще раз.
14. Устройство выбора режима парковки по п.1, в котором устанавливается диапазон угла поворота установки режима парковки, который включает в себя нейтральное положение и диапазоны угла поворота выбора режима парковки, которые соответственно ассоциативно связаны с режимами парковки, устройство выбора режима парковки дополнительно содержит блок регистрации крутящего момента, который регистрирует крутящий момент, прикладываемый к валу рулевого управления, и блок регистрации операции компенсирует угол поворота, когда рулевое колесо возвращается внутрь диапазона угла поворота установки режима парковки, и крутящий момент, зарегистрированный блоком регистрации крутящего момента, является равным или меньшим, чем предопределенное значение, а затем регистрирует, завершена или нет предопределенная операция, на основании скомпенсированного угла поворота.
15. Устройство выбора режима парковки по п.14, в котором блок регистрации операции устанавливает угол поворота в момент времени, возвращенный от момента времени, когда крутящий момент становится равным или меньшим, чем предопределенное значение, на время предопределенной длительности, в качестве компенсированного угла поворота и регистрирует предопределенную операцию, если компенсированный угол поворота находится в пределах диапазона угла поворота установки режима парковки.
16. Устройство выбора режима парковки по п.14, в котором блок регистрации операции фильтрует изменение угла поворота в течение предопределенной временной длительности до момента времени, когда крутящий момент становится равным или меньшим, чем предопределенное значение, для установки фильтрованного угла поворота в качестве компенсированного угла поворота, и регистрирует предопределенную операцию, если компенсированный угол поворота находится в пределах диапазона угла поворота установки режима парковки.
17. Устройство выбора режима парковки по п.1, в котором множество режимов парковки включает в себя перпендикулярную парковку на правой и левой сторонах, парковку под углом на правой и левой сторонах и параллельную парковку на правой и левой сторонах, и множество режимов парковки ассоциативно связано, последовательно, от нейтрального положения до каждого из правого и левого, с диапазоном угла поворота для перпендикулярной парковки, диапазоном угла поворота для парковки под углом и диапазоном угла поворота для параллельной парковки.
18. Устройство выбора режима парковки по п.17, в котором целевое положение установлено в каждом центре диапазонов угла поворота, ассоциативно связанных с множеством режимов парковки, и причем устройство выбора режима парковки дополнительно содержит генератор крутящего момента, который генерирует крутящий момент по направлению к нейтральному положению, когда угол поворота становится рассогласованным с целевым положением.
19. Устройство выбора режима парковки по п.1, в котором множество режимов парковки ассоциативно связано последовательно от нейтрального положения до правого и левого, с диапазонами угла поворота для наиболее частых режимов парковки.
20. Устройство выбора режима парковки для выбора одного режима парковки из множества режимов парковки, включающих в себя по меньшей мере перпендикулярную парковку и параллельную парковку, причем устройство содержит средство регистрации угла поворота, которое регистрирует угол поворота рулевого колеса, средство регистрации операции, которое регистрирует, на основании угла поворота, зарегистрированного средством регистрации угла поворота, предопределенную операцию, в которой рулевое колесо возвращается в нейтральное положение после того, как поворачивалось вправо или влево, и средство выбора режима парковки, которое выбирает, когда предопределенная операция зарегистрирована средством регистрации операции, один режим парковки по правую сторону транспортного средства или левую сторону транспортного средства, который соответствует направлению управления рулем вправо или влево угла поворота, зарегистрированного средством регистрации угла поворота в предопределенной операции, и ассоциативно связан с углом поворота в предопределенной операции, из множества режимов парковки.
21. Способ выбора режима парковки для выбора одного режима парковки из множества режимов парковки, включающих в себя по меньшей мере перпендикулярную парковку и параллельную парковку, причем способ состоит в том, что регистрируют угол поворота рулевого колеса, регистрируют, на основании зарегистрированного угла поворота, предопределенную операцию, в которой рулевое колесо возвращается в нейтральное положение после поворота вправо или влево, и выбирают, когда зарегистрирована предопределенная операция, один режим парковки по правую сторону транспортного средства или левую сторону транспортного средства, который соответствует направлению управления рулем вправо или влево зарегистрированного угла поворота в предопределенной операции и ассоциативно связан с углом поворота в предопределенной операции, из множества режимов парковки.
| JP 2008201363 A, 04.09.2008 | |||
| JP 2004123059 A, 22.04.2004 | |||
| JP 2009298179 A, 24.12.2009 | |||
| УСТРОЙСТВО ДЛЯ АВТОМОБИЛЯ | 2005 |
|
RU2380725C2 |

