Область техники, к которой относится изобретение
Изобретение относится к способу управления экстренным автономным торможением автотранспортного средства. Изобретение относится также к автотранспортному средству, содержащему аппаратные и/или программные средства, осуществляющие такой способ управления.
Предшествующий уровень техники
Говоря о безопасности на дорогах можно указать, что многие дорожные происшествия происходят по причине запоздалого и/или недостаточного торможения. Водитель может предпринять торможение слишком поздно по разным причинам, например, вследствие невнимательности, в условиях плохой видимости или при возникновении неожиданной ситуации. Большинство водителей не имеют навыка контроля этих критических ситуаций. Следовательно, они предпринимают торможение не достаточно рано и/или не прикладывают достаточной силы торможения, чтобы избежать дорожного происшествия.
Для обеспечения помощи водителям конструкторы автомобилей оснащают транспортные средства системами экстренного автономного торможения, называемыми также системами АЕВ (от английского “Automatic Emergency Braking”). Эти системы позволяют быстро идентифицировать критические ситуации при помощи средств отслеживания, таких как радар, камера или лидар, затем автономно производят торможение транспортного средства, как правило, с полной мощностью или с большой мощностью. Это позволяет избегать происшествий или уменьшать их серьезность.
Однако системы экстренного автономного торможения имеют недостатки. Действительно, они не отслеживают систематически потенциально опасную ситуацию или, наоборот, активируют средства торможения транспортного средства, ошибочно обнаруживая опасную ситуацию. В частности, когда транспортное средство подъезжает к пересечению или к перекрестку, траектория различных присутствующих транспортных средств, в том числе траектория транспортного средства, оснащенного системой экстренного автономного торможения, может резко меняться. Риски столкновения исключительно трудно отследить, и системы экстренного автономного торможения не всегда срабатывают надлежащим образом. Чтобы улучшить предсказание риска столкновения, известны системы, использующие данные, поступающие от бортовой системы навигации. Однако на практике водители не всегда следуют пути, предлагаемому системой навигации. Известны также системы связи между транспортными средствами для обмена информацией об их соответствующих траекториях. Однако эти системы являются очень сложными и предполагают, что все транспортные средства могут сообщаться между собой.
Задача изобретения
Изобретение призвано предложить способ управления экстренным автономным торможением, позволяющий устранить вышеупомянутые недостатки и усовершенствующий известные способы управления.
В частности, первой целью изобретения является надежный способ управления экстренным автономным торможением, включающий экстренное торможение, только когда в этом возникает необходимость.
Второй целью изобретения является простой в осуществлении способ управления экстренным автономным торможением, который, в частности, не требует использования данных навигации или устройства связи между транспортными средствами.
Раскрытие сущности изобретения
Объектом изобретения является способ управления экстренным автономным торможением первого автотранспортного средства, при этом способ управления содержит:
- этап вычисления риска столкновения первого транспортного средства с выезжающим сбоку вторым транспортным средством,
- этап наблюдения параметров ручного управления первого автотранспортного средства,
- этап вычисления по меньшей мере одного показателя, отображающего намерение поворота в сторону второго транспортного средства со стороны водителя первого транспортного средства, в зависимости от указанных параметров ручного управления,
- этап активации экстренного автономного торможения первого транспортного средства, если показатель отображает намерение повернуть в сторону второго транспортного средства со стороны водителя первого транспортного средства, или этап отмены экстренного автономного торможения первого транспортного средства, если показатель отображает отсутствие намерения повернуть в сторону второго транспортного средства со стороны водителя первого транспортного средства.
Вторым транспортным средством может быть транспортное средство, выезжающее слева от первого транспортного средства в случае правостороннего движения, или вторым транспортным средством может быть транспортное средство, выезжающее справа от первого транспортного средства в случае левостороннего движения, при этом первое транспортное средство движется по первой полосе движения, второе транспортное средство движется по второй полосе движения, при этом указанное столкновение может произойти по существу на пересечении между первой полосой движения и второй полосой движения.
Параметры ручного управления можно выбрать среди следующих параметров:
- активация поворотного сигнала первого транспортного средства, показывающего намерение повернуть в сторону второго транспортного средства,
- нажатие педали акселератора первого транспортного средства,
- нажатие педали тормоза первого транспортного средства, и
- измерение угла поворота рулевого колеса первого транспортного средства.
Экстренное автономное торможение первого транспортного средства может быть отменено:
- если нажатие на педаль акселератора превышает или равно первому порогу, и/или
- если нажатие на педаль тормоза строго меньше второго порога и поворотный сигнал в сторону второго транспортного средства не активирован, и/или
- если нажатие на педаль тормоза строго меньше второго порога и угол поворота рулевого колеса в сторону второго транспортного средства строго меньше третьего порога, и/или
- если поворотный сигнал в сторону второго транспортного средства не активирован и угол поворота рулевого колеса в сторону второго транспортного средства строго меньше третьего порога.
Экстренное автономное торможение первого транспортного средства может быть активировано:
- если нажатие на педаль акселератора строго меньше первого порога, нажатие на педаль тормоза превышает или равно второму порогу, и поворотный сигнал в сторону второго транспортного средства активирован, и/или
- если нажатие на педаль акселератора строго меньше первого порога, нажатие на педаль тормоза превышает или равно второму порогу, и угол поворота рулевого колеса в сторону второго транспортного средства превышает или равен третьему порогу, и/или
- если нажатие на педаль акселератора строго меньше первого порога, поворотный сигнал в сторону второго транспортного средства активирован, и угол поворота рулевого колеса в сторону второго транспортного средства превышает или равен третьему порогу.
Этап вычисления риска столкновения первого транспортного средства с выезжающим сбоку вторым транспортным средством может содержать:
- первый подэтап отслеживания столкновения между первым транспортным средством и вторым транспортным средством при предположении, что первое транспортное средство повернет в сторону второго транспортного средства, и
- второй подэтап отслеживания отсутствия столкновения между первым транспортным средством и вторым транспортным средством при предположении, что первое транспортное средство не повернет в сторону второго транспортного средства.
Способ управления может быть осуществлен в последний момент, в который может сработать экстренное автономное торможение, чтобы избежать столкновения между первым транспортным средством и вторым транспортным средством.
Объектом изобретения является также компьютерный программный продукт, содержащий командные коды программы, записанные на носителе, считываемом электронным блоком управления, для осуществления этапов описанного выше способа, когда указанная программа работает на электронном блоке управления. Объектом изобретения является также компьютерный программный продукт, загружаемый дистанционно из коммуникационной сети и/или исполняемый компьютером, при этом программный продукт содержит команды, которые, когда программу исполняет компьютер, приводят к осуществлению последним описанного выше способа.
Объектом изобретения является также носитель записи данных, считываемый электронным блоком управления, на котором записана компьютерная программа, содержащая командные коды программы для осуществления описанного выше способа управления. Объектом изобретения является также носитель записи, считываемый электронным блоком управления, содержащий команды, которые, когда программу исполняет компьютер, приводят к осуществлению последним описанного выше способа.
Объектом изобретения является также сигнал носителя данных, содержащего описанный выше компьютерный программный продукт.
Объектом изобретения является также автотранспортное средство, содержащее аппаратные и/или программные средства, осуществляющие описанный выше способ управления.
Описание чертежей
Эти объекты, отличительные признаки и преимущества настоящего изобретения будут подробно изложены в нижеследующем описании частного варианта осуществления, представленного в качестве не ограничительного примера, со ссылками на прилагаемые фигуры, на которых:
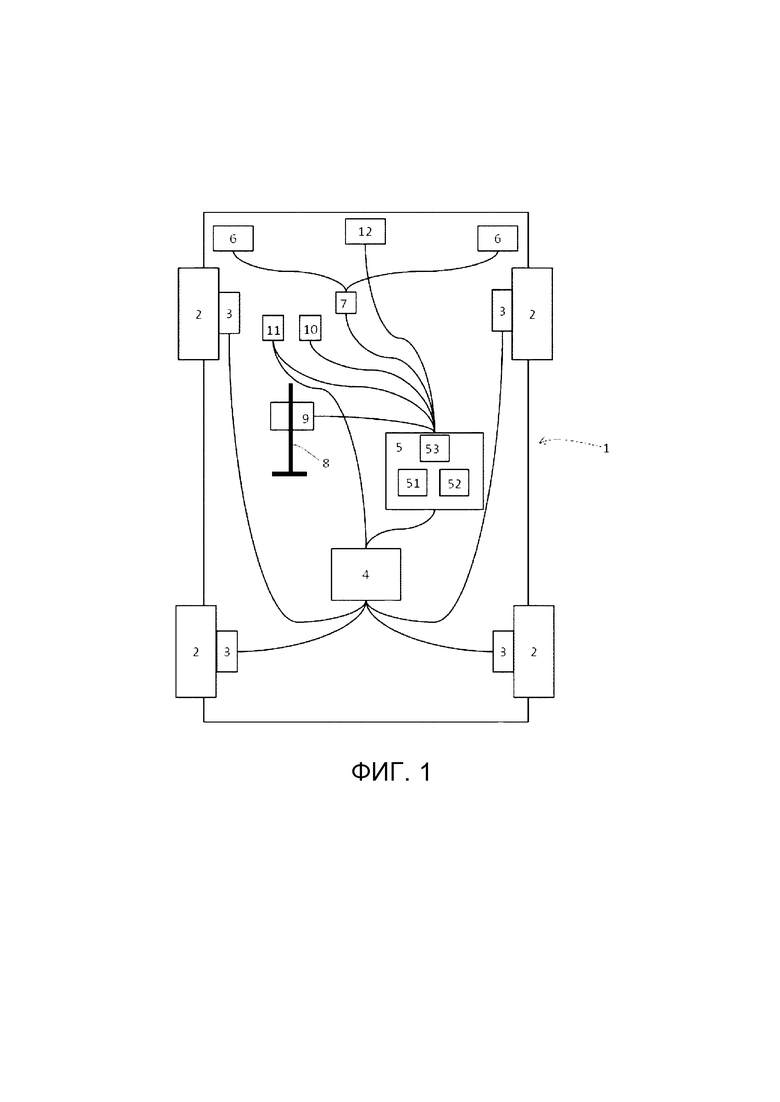
Фиг. 1 - схематичный вид автотранспортного средства согласно варианту выполнения изобретения.
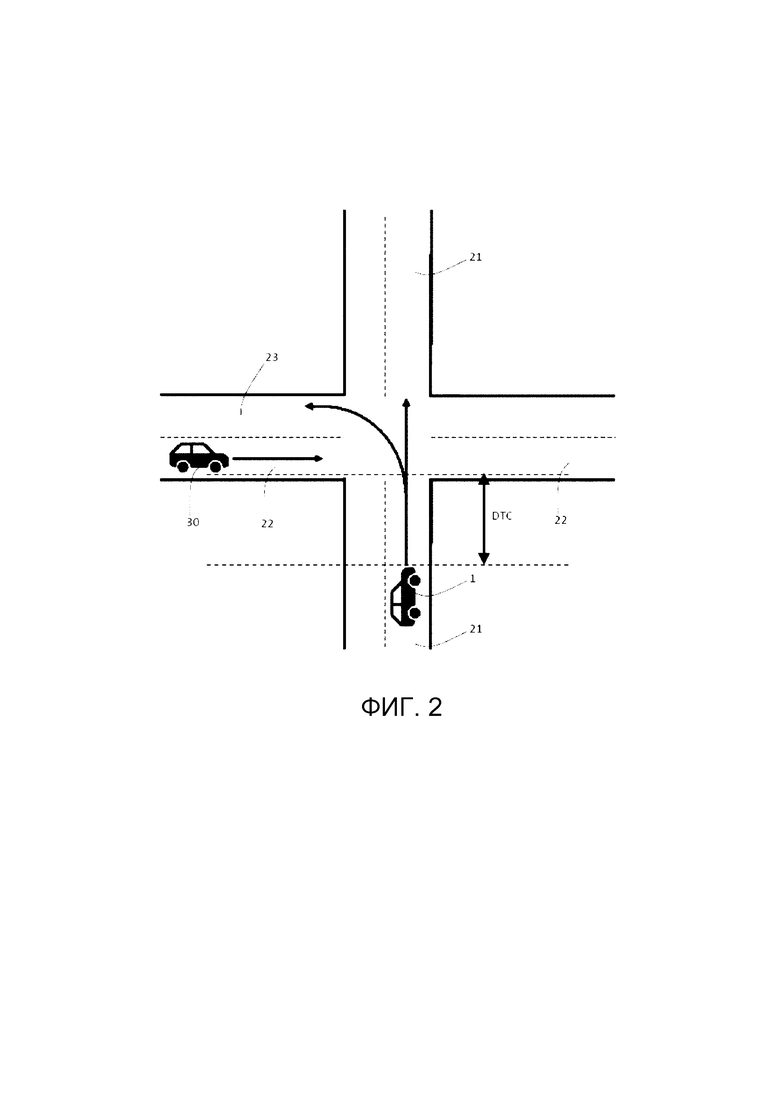
Фиг. 2 - схематичный вид сверху транспортного средства на полосе движения с правосторонним движением.
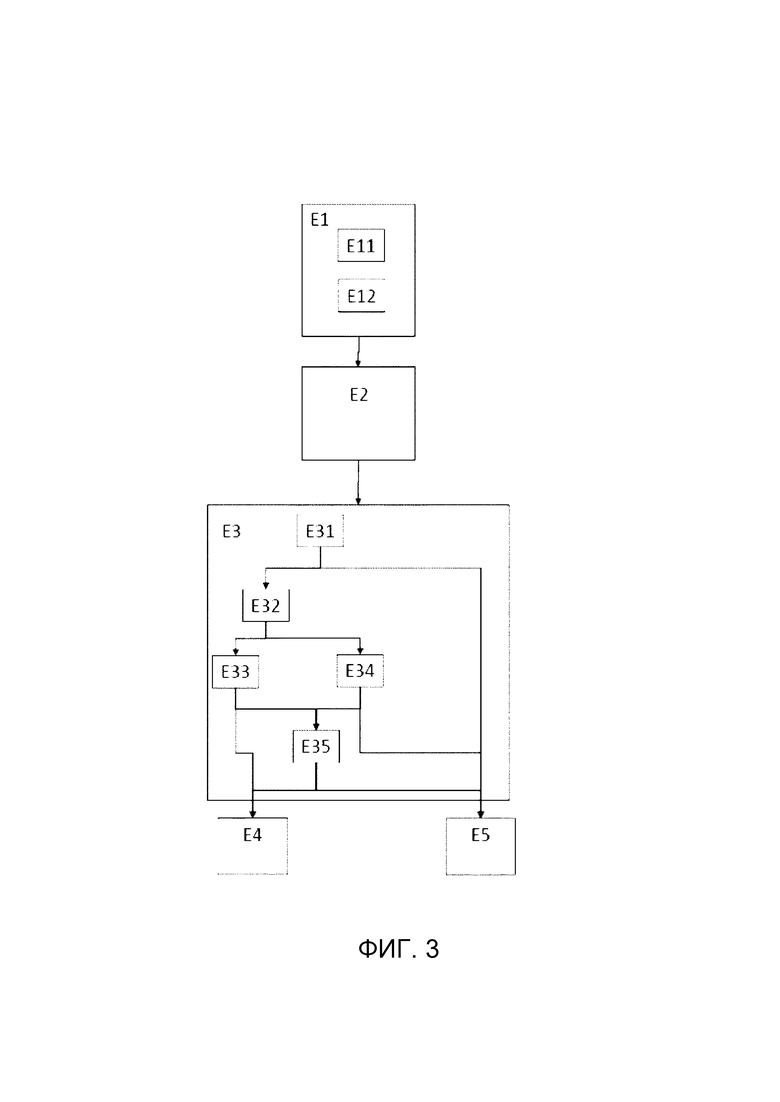
Фиг. 3 - блок-схема этапов способа управления согласно варианту осуществления изобретения.
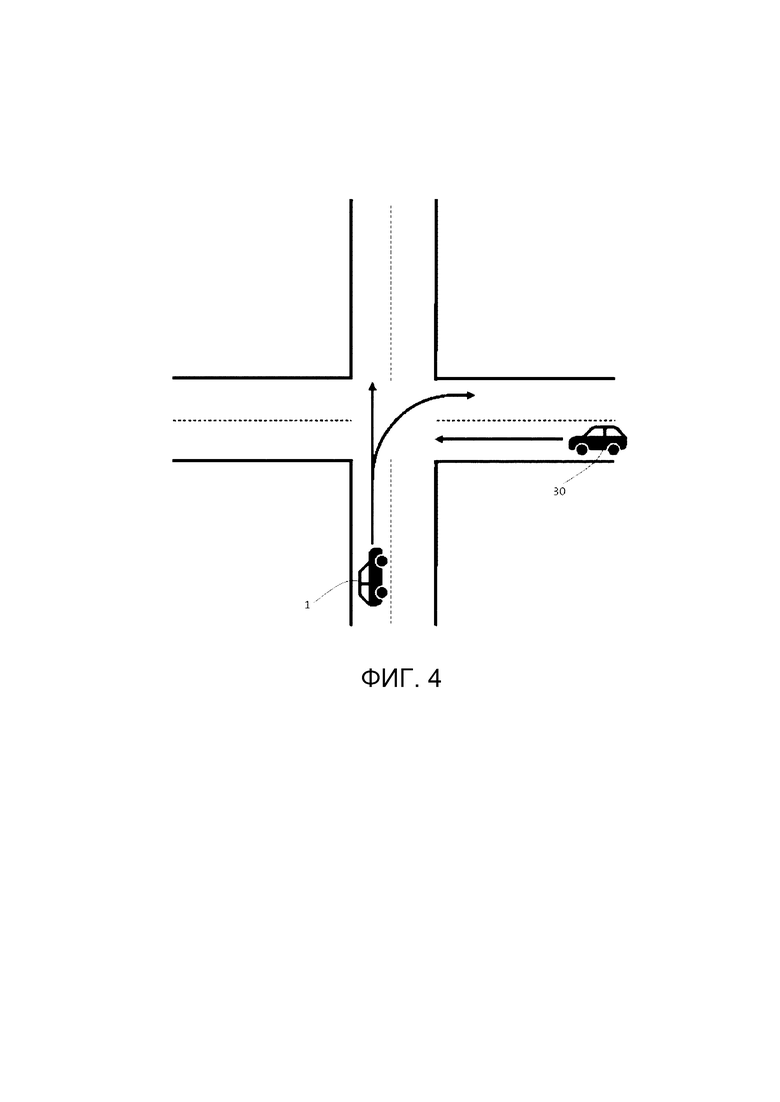
Фиг. 4 - схематичный вид сверху транспортного средства на полосе движения с левосторонним движением.
Осуществление изобретения
На фиг. 1 схематично показано автотранспортное средство 1 согласно варианту выполнения изобретения. Транспортное средство 1 может быть любым. В частности, оно может быть легковым автомобилем, коммерческим транспортным средством, грузовиком или автобусом. Транспортное средство 1 содержит четыре колеса 2, оснащенные, каждое, средством 3 торможения. Средства 3 торможения соединены с приводом 4 транспортного средства, который, в свою очередь, соединен с электронным блоком 5 управления транспортного средства. Кроме того, транспортное средство 1 содержит два поворотных сигнала 6 справа и слева от транспортного средства (при этом левая сторона и правая сторона определены с точки зрения водителя транспортного средства 1). Поворотные сигналы 6 представляют собой световые указатели, активируемые водителем транспортного средства через интерфейс 7 управления, чтобы указать другим пользователям дороги намерение повернуть налево или намерение повернуть направо. Транспортное средство 1 содержит также рулевое колесо 8, контролируемое водителем транспортного средства 1, чтобы ориентировать управляемые колеса транспортного средства, и датчик 9 угла поворота рулевого колеса. Датчик угла поворота рулевого колеса выполнен с возможностью выдавать сигнал, зависящий от ориентации рулевого колеса. Транспортное средство 1 содержит также педаль 10 акселератора или педаль газа, на которую водитель может нажимать для ускорения транспортного средства 1. Транспортное средство 1 содержит также педаль 11 тормоза, на которую водитель может нажимать, чтобы затормозить транспортное средство 1. Педаль 10 акселератора и педаль 11 тормоза оснащены, каждая, датчиком, позволяющим измерять уровень их нажатия. Уровень нажатия на педаль может меняться от 0%, когда водитель не нажимает на педаль, до 100%, когда водитель нажимает на педаль до конца хода. Активация поворотного сигнала, нажатие на педаль 10 акселератора, нажатие на педаль 11 тормоза и угол поворота рулевого колеса являются параметрами ручного управления транспортного средства 1, то есть параметрами, которые водитель может свободно изменять, чтобы контролировать свое транспортное средство, в частности, при помощи своих ног или своих рук. Кроме того, транспортное средство 1 содержит средства 12 отслеживания окружающей среды транспортного средства 1, например, такие как радары, и/или лидары, и/или камеры. Средства 12 отслеживания выполнены, в частности, с возможностью отслеживать полосы движения и транспортные средства, окружающие транспортное средство 1.
Электронный блок 5 управления содержит память 51, микропроцессор 52 и интерфейс 53 входа/выхода для получения данных от других устройств транспортного средства 1 или для передачи данных в другие устройства транспортного средства 1. В частности, электронный блок 5 управления электрически соединен с приводом 4, с интерфейсом 7, контролирующим активацию поворотных сигналов 6, с датчиком 9 угла поворота рулевого колеса, с датчиком нажатия педали 10 акселератора, с датчиком нажатия педали 11 тормоза и со средствами 12 отслеживания. Память 51 электронного блока управления является носителем записи данных, на котором записана компьютерная программа, содержащая командные коды программы для исполнения способа согласно варианту осуществления изобретения. Микропроцессор 52 выполнен с возможностью исполнять способ. В частности, электронный блок 5 управления выполнен с возможностью направлять команды в привод 4 через свой интерфейс 53 входа/выхода, чтобы приводить в действие средства 3 торможения.
Привод 4 может активировать средства 3 торможения либо в ответ на нажатие педали 11 тормоза водителем, либо в ответ на команду, переданную электронным блоком 5 управления, независимо от любого нажатия на педаль 11 тормоза. В частности, электронный блок управления может передать команду экстренного автономного торможения. При этом средства торможения могут быть приведены в действие с полной мощностью или с высокой мощностью для быстрого замедления транспортного средства 1. Экстренное автономное торможение может служить для предупреждения или минимизации последствий столкновения.
На фиг. 2 показано транспортное средство 1, движущееся по первой полосе 21 движения первой дороги. Дорога ограничена слева и справа двумя ограничительными линиями, выполненными в виде сплошных линий. Первая дорога может быть как с односторонним движением, так и с двухсторонним движением. Как показано на фиг. 2, дорога содержит две параллельные полосы движения, но в варианте она может иметь только одну или три полосы движения и даже больше. Спереди транспортного средства 1 первая дорога пересекается с второй дорогой, по существу перпендикулярной к первой дороге. Пересечение или, иначе говоря, перекресток образован, таким образом, на пересечении между первой дорогой и второй дорогой. В варианте вторая дорога может быть не перпендикулярной к первой дороге и, следовательно, может образовать с первой дорогой угол, отличный от 90°. Вторая дорога содержит вторую полосу 22 движения, по которой движется второе транспортное средство 30. Второе транспортное средство 30 направляется к пересечению, образованному между первой полосой движения и второй полосой движения. Следовательно, оно выезжает сбоку относительно первого транспортного средства 1. В целом, выезжающее сбоку транспортное средство является транспортным средством, траектория которого пересекает траекторию первого транспортного средства 1. Вторая дорога содержит третью полосу 23 движения, параллельную второй полосе 22 движения, для транспортных средств, движущихся навстречу второго транспортного средства 30. Первая полоса 21 движения, вторая полоса 22 движения и третья полоса 23 движения могут располагаться с двух сторон от перекрестка. Эти полосы движения могут проходить по прямой линии, как показано на фиг.2, или в варианте могут быть изогнутыми. На своем дальнейшем пути транспортное средство 1 (которое можно также называть «первым транспортным средством 1») может продолжать двигаться прямо и оставаться на первой полосе движения, или повернуть налево и занять третью полосу движения, то есть повернуть в сторону второго транспортного средства 30. Как в одном, так и в другом случае траектория первого транспортного средства 1 пересекает траекторию второго транспортного средства 2. В варианте первое транспортное средство 1 может также повернуть направо на вторую полосу движения. Первое транспортное средство 1 и второе транспортное средство 30 движутся по правилам дорожного движения, называемого правосторонним движением. Это значит, что транспортные средства располагаются справа на соответствующей дороге. Кроме того, в отсутствие специальной сигнализации на пересечении двух дорог, применяют правило преимущества транспортного средства справа. Таким образом, в конфигурации, показанной на фиг. 1, первое транспортное средство 1 имеет преимущество перед вторым транспортным средством 30. Следовательно, второе транспортное средство 30 должно пропустить первое транспортное средство 1, независимо от полосы 21, 22, 23 движения, которую первое транспортное средство 1 занимает после пересечения.
В конфигурации, показанной на фиг. 1, существует риск столкновения между двумя транспортными средствами 1 и 30, в частности, если второе транспортное средство 30 продолжает двигаться по своей траектории, не притормаживая, и если первое транспортное средство 1 поворачивает в сторону второго транспортного средства 30, то есть налево. Предположив, что первое транспортное средство 1 поворачивает налево и что второе транспортное средство 30 не меняет своей траектории, можно вычислить расстояние DTC до столкновения, отделяющее транспортное средство 1 от виртуального места удара по второму транспортному средству 30. Виртуальное место удара является место, где удар может произойти, если первое транспортное средство 1 поворачивает налево и второе транспортное средство 30 не меняет своей траектории. Можно также вычислить время до столкновения (называемое также английским выражением “time to collision”) как время между данным моментом и моментом, когда может произойти столкновение между первым транспортным средством 1 и вторым транспортным средством 30, если не предпринять никакого действия. Расстояние до столкновения и время до столкновения зависят, таким образом, от скоростей и траекторий, оцениваемых для первого транспортного средства 1 и для второго транспортного средства 30. В конфигурации, показанной на фиг. 2, считается, что первое транспортное средство 1 не поворачивает налево, а продолжает двигаться прямо, и столкновения с вторым транспортным средством 30 не будет. С другой стороны, если первое транспортное средство 1 повернет налево, то может произойти столкновение с вторым транспортным средством 30. Действительно, при повороте налево скорость транспортного средства 1 по оси полосы 21 движения снижается, и транспортное средство 1 тратит больше времени в коридоре траектории второго транспортного средства 30, то есть оно тратит больше времени в зоне, общей для траектории первого транспортного средства 1 и второго транспортного средства 30.
На фиг. 3 представлена блок-схема способа управления экстренным автономным торможением первого транспортного средства 1 согласно варианту осуществления изобретения.
Способ управления содержит первый этап Е1 вычисления риска столкновения первого транспортного средства 1 с вторым транспортным средством 30, второй этап Е2 наблюдения параметров ручного управления первого транспортного средства 1, третий этап Е3 вычисления по меньшей мере одного показателя, отражающего намерение водителя первого транспортного средства 1 повернуть в сторону второго транспортного средства 30, в зависимости от указанных параметров ручного управления и, наконец, четвертый этап Е4 активации экстренного автономного торможения первого транспортного средства 1 или пятый этап Е5 отмены экстренного автономного торможения первого транспортного средства. В частности, если показатель, вычисленный на этапе Е3 вычисления, показывает намерение повернуть в сторону второго транспортного средства 30 со стороны водителя первого транспортного средства 1, активируют экстренное автономное торможение. Если же указанный показатель свидетельствует об отсутствии намерения водителя первого транспортного средства 1 повернуть в сторону второго транспортного средства 30, отменяют экстренное автономное торможение.
Во время первого этапа Е1 обнаруживают, в частности, при помощи средств 12 отслеживания, вторую полосу 22 движения, пересекающую первую полосу 21 движения. Обнаруживают также второе транспортное средство 30 на второй полосе 22 движения. В частности, отслеживают траекторию второго транспортного средства 30 и его скорость. Это позволяет экстраполировать будущие положения второго транспортного средства 30, предположив, что оно не меняет направления или скорости. На первом подэтапе Е11 обнаруживают, что может произойти столкновение между первым транспортным средством и вторым транспортным средством при предположении, что первое транспортное средство повернет в сторону второго транспортного средства. На втором подэтапе Е12 обнаруживают, что столкновения между двумя транспортными средствами не будет при предположении, что первое транспортное средство не повернет в сторону второго транспортного средства, в частности, при предположении, что первое транспортное средство будет продолжать движение прямо по первой полосе движения. Если первое транспортное средство 1 повернет налево, оно приблизится к второму транспортному средству 30 в большей степени, чем если бы оно двигалось прямо. Кроме того, скорость первого транспортного средства 1 снижается, следовательно, оно проводит больше времени в коридоре траектории второго транспортного средства 30. Таким образом, понятно, что риск столкновения является более серьезным, если первое транспортное средство поворачивает налево, чем если бы оно продолжало ехать прямо. Иначе говоря, на первом этапе Е1 обнаруживают ситуацию, в которой может произойти столкновение, если и только если первое транспортное средство поворачивает налево. Следует заметить, что, если обнаруживают, что столкновение может произойти при любой траектории первого транспортного средства 1, то напрямую может включиться экстренное автономное торможение. Если же обнаруживают отсутствие риска столкновения при любой траектории первого транспортного средства 1, то экстренное автономное торможение может быть отменено, то есть деактивировано.
Время до столкновения между двумя транспортными средствами 1 и 30 можно вычислить, предположив, что водитель первого транспортного средства повернет налево на третью полосу 23 движения. Время до столкновения уменьшается по мере приближения двух транспортных средств 1 и 30 к пересечению между двумя полосами 21 и 22 движения. После этого способ управления продолжается до последнего момента, в который может быть включено экстренное автономное торможение, чтобы избежать столкновения. Иначе говоря, до момента, соответствующего оцененному моменту столкновения, минус время до столкновения, соответствующее расстоянию экстренного автономного торможения. Следовательно, способ управления исполняют только один раз при приближении к пересечению и в абсолютно точный момент, вычисленный в зависимости от скоростей двух транспортных средств 1 и 30 и от их положения по отношению к пересечению. Исполняя способ управления в этот точный момент, используют как можно более надежные данные о траекториях транспортных средств 1 и 30, избегая при этом столкновения. Это позволяет увеличить шансы того, что экстренное автономное торможение будет активировано надлежащим образом. Разумеется, заявленный способ управления можно повторить в дальнейшем при приближении к другому пересечению.
Затем предпочтительно параллельно с первым этапом Е1 осуществляют второй этап Е2. На втором этапе Е2 наблюдают параметры ручного управления первого транспортного средства 1. В частности, можно определить значение бинарной переменной, зависящей от активации левого поворотного сигнала. Можно также определить значение нажатия на педаль 10 акселератора, например, в виде процентного значения от 0% до 100%. Точно так же, можно определить значение нажатия педали 11 тормоза, например, в виде процентного значения от 0% до 100%. Наконец, можно определить угол поворота рулевого колеса, измеренный датчиком 9 угла поворота рулевого колеса. Таким образом, получают четыре значения или параметра ручного управления, которые будут затем использованы на третьем этапе Е3.
Во время третьего этапа Е3, предпочтительно осуществляемого только когда экстренное торможение не отменено на этапе Е1, в зависимости от параметров ручного управления вычисляют показатель, отображающий намерение повернуть налево. Например, этот показатель может быть равен первому значению, если обнаружено намерение повернуть налево, или может быть равен второму значению, если обнаружено отсутствие намерения повернуть налево. Значение этого показателя может быть сохранено в памяти электронного блока 5 управления.
В частности, намерение водителя первого транспортного средства 1 повернуть налево может быть обнаружено, если соблюдено по меньшей мер одно из следующих трех условий:
- во-первых, если значение нажатия на педаль 10 акселератора строго меньше первого порога, значение нажатия на педаль 11 тормоза превышает или равно второму порогу, и активирован поворотный сигнал 6 в сторону второго транспортного средства 30,
- во-вторых, если значение нажатия на педаль 10 акселератора строго меньше первого порога, значение нажатия на педаль 11 тормоза превышает или равно второму порогу, и угол поворота рулевого колеса в сторону второго транспортного средства 30, измеренный датчиком 9 угла поворота рулевого колеса, превышает или равен третьему порогу,
- в-третьих, если значение нажатия на педаль 10 акселератора строго меньше первого порога, активирован поворотный сигнал 6 в сторону второго транспортного средства 30, и угол поворота рулевого колеса в сторону второго транспортного средства 30 превышает или равен третьему порогу.
С другой стороны, отсутствие намерения водителя первого транспортного средства 1 повернуть налево может быть обнаружено, если соблюдено по меньшей мере одно из следующих четырех условий:
- во-первых, если значение нажатия на педаль 10 акселератора превышает или равно первому порогу,
- во-вторых, если значение нажатия на педаль 11 тормоза строго меньше второго порога, и не активирован поворотный сигнал 6 в сторону второго транспортного средства 30,
- в-третьих, если значение нажатия на педаль 11 тормоза строго меньше второго порога, и угол поворота рулевого колеса в сторону второго транспортного средства 30 строго меньше третьего порога,
- в-четвертых, если не активирован поворотный сигнал 6 в сторону второго транспортного средства 30, и угол поворота рулевого колеса в сторону второго транспортного средства 30 строго меньше третьего порога.
Первый порог может быть определен, например, в значении 5% нажатия на педаль акселератора. Таким образом, даже легкое действие на педаль акселератора приводит к деактивации экстренного автономного торможения. Нажатие на педаль акселератора может, таким образом, быть истолковано как желание водителя не останавливаться и, следовательно, пройти пересечение раньше второго транспортного средства 30. Второй порог может быть определен в значении 10% нажатия на педаль тормоза. Третий порог может быть определен, например, в значении 3° угла поворота в направлении второго транспортного средства 30. Вместе с тем, эти пороги можно корректировать в зависимости от требуемого поведения транспортного средства во время фазы доводки транспортного средства 1. Чем больше увеличивается первый порог, и/или уменьшается второй порог, и/или уменьшается третий порог, тем лучше будет проходить активация экстренного автономного торможения. С другой стороны, наоборот, чем больше уменьшается первый порог, и/или увеличивается второй порог, и/или увеличивается третий порог, тем больше это способствует отмене экстренного автономного торможения.
Представленные условия активации или отмены экстренного автономного торможения можно проверить, используя древо решения. Как показано на фиг. 3, на первом подэтапе Е31 третьего этапа Е3 сравнивают значение нажатия на педаль акселератора с первым порогом. Если значение нажатия на педаль акселератора превышает или равно первому порогу, переходят на пятый этап Е5, на котором отменяют экстренное автономное торможение. Если же, наоборот, значение нажатия на педаль акселератора строго меньше первого порога, переходят на второй подэтап Е32, на котором сравнивают значение нажатия на педаль тормоза с вторым порогом. Если значение нажатия на педаль тормоза превышает или равно второму порогу, переходят на третий подэтап Е33. Если же, наоборот, значение нажатия на педаль тормоза строго меньше второго порога, переходят на четвертый подэтап Е34. На третьем подэтапе Е33 наблюдают, активирован ли левый поворотный сигнал. Если левый поворотный сигнал активирован, переходят на четвертый этап Е4, на котором активируют экстренное автономное торможение. Если левый поворотный сигнал не активирован, переходят на пятый подэтап Е35. На пятом подэтапе Е35 сравнивают угол поворота рулевого колеса, измеренный датчиком угла поворота рулевого колеса, с третьим порогом. Если угол поворота рулевого колеса превышает или равен третьему порогу, переходят на четвертый этап Е4. Если же, наоборот, угол поворота рулевого колеса строго меньше третьего порога, переходят на пятый этап Е5. На четвертом подэтапе Е34 наблюдают, активирован ли левый поворотный сигнал. Если левый поворотный сигнал активирован, переходят на пятый подэтап Е35. Если левый поворотный сигн6ал не активирован, переходят на пятый этап Е5.
Таким образом, чтобы активировать экстренное автономное торможение, необходимо проверить условия по меньшей мере на трех параметрах ручного управления. Это позволяет избежать нежелательной активации экстренного автономного торможения. В частности, в ситуации, когда водитель первого транспортного средства 1 считает, что имеет достаточно времени, чтобы пройти пересечение раньше второго транспортного средства 30, избегают активации экстренного автономного торможения, которое могло бы в результате замедлить первое транспортное средство 1 и, следовательно, увеличить риск столкновения с транспортным средством 30 или с транспортным средством, которое следует за первым транспортным средством 1. Например, если при приближении к пересечению первое транспортное средство 1 поворачивает в сторону второго транспортного средства 30, но при этом не тормозит и не активирует поворотный сигнал, экстренное автономное торможение не активируется. Действительно, водитель может просто намереваться сменить ряд, но не намеревается повернуть налево. Кроме того, способ управления является простым в осуществлении, так как основан на использовании параметров ручного управления, доступных почти на всех транспортных средствах. Следовательно, он не требует установки дополнительных датчиков.
Как показано на фиг. 4, описанный выше способ управления можно транспонировать на территории с левосторонним движением. В этом случае способ применяют, когда второе транспортное средство 30 выезжает справа. В этом случае на третьем этапе вычисления определяют, намеревается или нет первое транспортное средство повернуть направо. Следовательно, наблюдают, в частности, активирован или нет правый поворотный сигнал, и/или превышает ли угол поворота рулевого колеса определенный порог вправо.
Предложен способ управления экстренным автономным торможением первого автотранспортного средства (1), содержащий: этап (Е1) вычисления риска столкновения первого транспортного средства (1) с приближающимся сбоку вторым транспортным средством (30), этап (Е2) наблюдения параметров ручного управления первого транспортного средства, этап (Е3) вычисления по меньшей мере одного показателя, свидетельствующего о намерении повернуть в сторону второго транспортного средства со стороны водителя первого транспортного средства, в зависимости от указанных параметров ручного управления, этап (Е4) активации экстренного автономного торможения первого транспортного средства, если показатель свидетельствует о намерении повернуть в сторону второго транспортного средства со стороны водителя первого транспортного средства. Технический результат – надежность и простота способа управления экстренным автономным торможением, который не требует использования данных навигации или устройства связи между транспортными средствами. 3 н. и 5 з.п. ф-лы, 4 ил.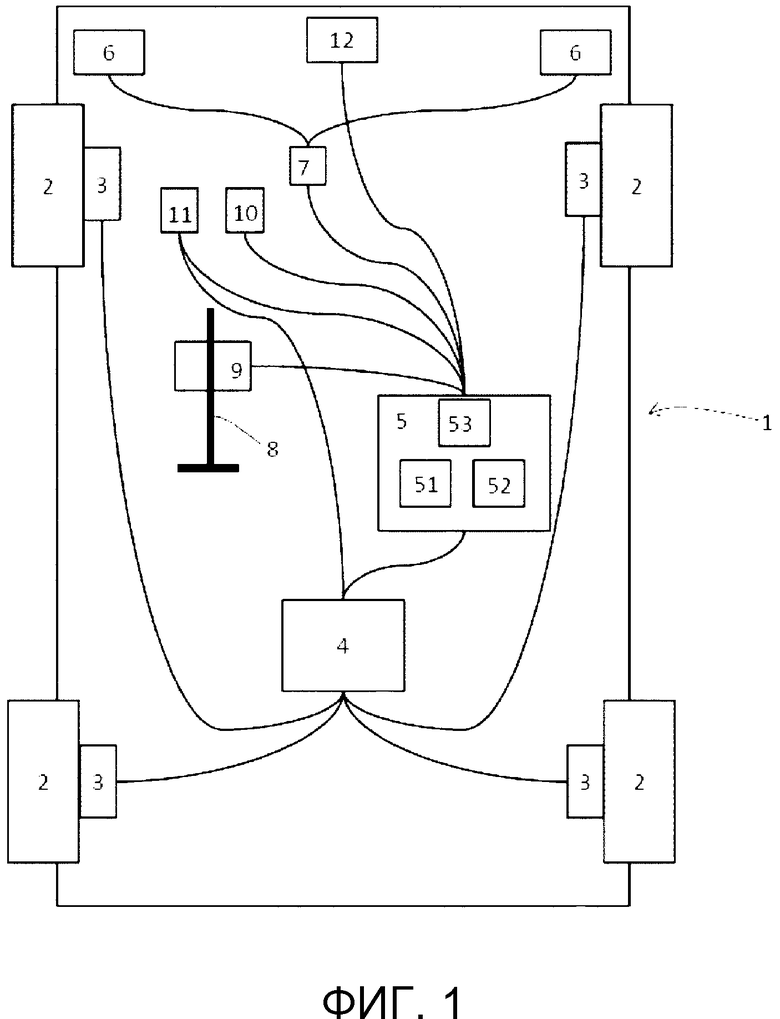
1. Способ управления экстренным автономным торможением первого автотранспортного средства (1), содержащий:
этап (Е1) вычисления риска столкновения первого транспортного средства (1) с приближающимся сбоку вторым транспортным средством (30),
этап (Е2) наблюдения параметров ручного управления первого автотранспортного средства (1),
этап (Е3) вычисления по меньшей мере одного показателя, свидетельствующего о намерении повернуть в сторону второго транспортного средства (30) со стороны водителя первого транспортного средства (1), в зависимости от указанных параметров ручного управления,
этап (Е4) активации экстренного автономного торможения первого транспортного средства (1), если показатель свидетельствует о намерении повернуть в сторону второго транспортного средства (30) со стороны водителя первого транспортного средства (1), или этап (Е5) запрета экстренного автономного торможения первого транспортного средства (1), если показатель свидетельствует об отсутствии намерения повернуть в сторону второго транспортного средства (30) со стороны водителя первого транспортного средства (1),
при этом вторым транспортным средством (30) является транспортное средство, приближающееся слева от первого транспортного средства (1), в случае правостороннего движения или вторым транспортным средством (30) является транспортное средство, приближающееся справа от первого транспортного средства (1), в случае левостороннего движения, при этом первое транспортное средство (1) движется по первой полосе (21) движения, второе транспортное средство (30) движется по второй полосе (22) движения, при этом указанное столкновение может произойти по существу на пересечении между первой полосой (21) движения и второй полосой (22) движения.
2. Способ управления по п. 1, в котором параметры ручного управления выбираются из:
активации поворотного сигнала (6) первого транспортного средства (1), показывающего намерение повернуть в сторону второго транспортного средства (30),
нажатия педали (10) акселератора первого транспортного средства (1),
нажатия педали (11) тормоза первого транспортного средства (1), и
измерения угла поворота рулевого колеса первого транспортного средства (1).
3. Способ управления по п. 2, в котором экстренное автономное торможение первого транспортного средства (1) отменяется:
если нажатие на педаль (10) акселератора превышает или равно первому порогу, и/или
если нажатие на педаль (11) тормоза строго меньше второго порога и поворотный сигнал (6) со стороны второго транспортного средства (30) не активирован, и/или
если нажатие на педаль (11) тормоза строго меньше второго порога и угол поворота рулевого колеса в сторону второго транспортного средства (30) строго меньше третьего порога, и/или
если поворотный сигнал (6) со стороны второго транспортного средства (30) не активирован и угол поворота рулевого колеса в сторону второго транспортного средства (30) строго меньше третьего порога.
4. Способ управления по п. 2 или 3, в котором экстренное автономное торможение первого транспортного средства (1) активируется:
если нажатие на педаль (10) акселератора строго меньше первого порога, нажатие на педаль (11) тормоза превышает или равно второму порогу, и поворотный сигнал (6) со стороны второго транспортного средства (30) активирован, и/или
если нажатие на педаль (10) акселератора строго меньше первого порога, нажатие на педаль (11) тормоза превышает или равно второму порогу, и угол поворота рулевого колеса в сторону второго транспортного средства (30) превышает или равен третьему порогу, и/или
если нажатие на педаль (10) акселератора строго меньше первого порога, поворотный сигнал (6) со стороны второго транспортного средства (30) активирован, и угол поворота рулевого колеса в сторону второго транспортного средства (30) превышает или равен третьему порогу.
5. Способ управления по любому из пп. 1-4, в котором этап (Е1) вычисления риска столкновения первого транспортного средства (1) с приближающимся сбоку вторым транспортным средством (30) содержит:
первый подэтап (Е11) определения столкновения между первым транспортным средством (1) и вторым транспортным средством (30) при предположении, что первое транспортное средство (1) повернет в сторону второго транспортного средства (30), и
второй подэтап (Е12) определения отсутствия столкновения между первым транспортным средством (1) и вторым транспортным средством (30) при предположении, что первое транспортное средство (1) не повернет в сторону второго транспортного средства (30).
6. Способ управления по любому из пп. 1-5, в котором способ реализуют в последний момент, в который может быть запущено экстренное автономное торможение, чтобы избежать столкновения между первым транспортным средством (1) и вторым транспортным средством (30).
7. Носитель записи данных, считываемый электронным блоком (5) управления, на котором записана компьютерная программа, содержащая командные коды программы для реализации способа управления по любому из пп. 1-6.
8. Автотранспортное средство (1), содержащее аппаратные и/или программные средства (3, 4, 5, 12), реализующие способ управления по любому из пп. 1-6.
| УСТРОЙСТВО ТЕХНИЧЕСКОЙ ПОДДЕРЖКИ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И СПОСОБ ТЕХНИЧЕСКОЙ ПОДДЕРЖКИ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2566326C1 |
| Способ определения окиси алюминия в металлической алюминиевой пудре | 1940 |
|
SU61052A1 |
| DE 102015209947 A1, 03.12.2015. | |||

