Настоящее изобретение относится к обнаружению недостаточного давления шин автотранспортного средства и, в частности, к непрямому контролю состояния накачки шин управляемых колес транспортного средства.
В рамках настоящего описания под поперечным усилием следует понимать усилие, необходимое для поворачивания управляемых колес вокруг вертикальной оси. Под продольным усилием следует понимать усилие, прикладываемое к ведущим или управляемым колесам, чтобы поворачивать их вокруг поперечных осей. В частности, речь идет о создаваемых двигателем тяговых или толкающих усилиях и об усилиях торможения.
Состояние недостаточной накачки шины колеса автотранспортного средства, в частности, недостаточное давление может представлять собой опасность. Под недостаточным давлением следует понимать снижение давления шины относительно рекомендованного нормального давления.
Например, недостаточное давление шины может привести к ее разрыву в некоторых условиях вождения. Такой разрыв может иметь серьезные последствия для людей, находящихся в транспортном средстве. Даже в отсутствие разрыва недостаточное давление является существенным недостатком, так как приводит к повышенному расходу топлива и к быстрому износу шины, а также влияет на управляемость и на дистанцию торможения.
С учетом всех этих причин было предложено устанавливать в автотранспортных средствах средства автоматического контроля давления в шинах, которыми оснащены эти транспортные средства. Первое решение состоит в установке датчика давления на каждой шине.
Эти средства контроля давления шин не дали ожидаемых результатов, учитывая стоимость установки датчиков и сложность средств передачи считываемых сигналов, которые должны работать в трудных условиях окружающей среды автотранспортного средства, то есть в условиях вибрации, появления паразитных сигналов, колебаний температуры, выбросов воды, грязи и т.д.
Для устранения этого недостатка были предложены так называемые непрямые методы с использованием систем, которые не содержат датчика давления, а оценивают падение давления шины. Среди этих непрямых методов можно назвать методы, основанные на временном или частотном анализе сигналов скоростей колес. Например, можно сослаться на документы FR 2927018 и WO 2012127139, в которых описаны непрямые методы, основанные на изучении разностей скоростей между каждым из колес транспортного средства или на изучении спектральной скорости по меньшей мере одного из колес транспортного средства, которая связана с состоянием накачки соответствующей шины.
Однако практика показывает, что методы, основанные на скорости колес транспортного средства, имеют свои ограничения и, в частности, не являются достаточно надежными.
В связи с этим изобретение призвано предложить систему обнаружения недостаточного давления одного из колес транспортного средства, которая не требует наличия датчика давления и основана на других данных, отличных от скорости колеса.
Таким образом, объектом изобретения является система обнаружения состояния накачки по меньшей мере одной из шин управляемых колес автотранспортного средства, содержащая:
- первые средства измерения поперечного момента, прикладываемого к управляемым колесам,
- вторые средства измерения угла поворота рулевого колеса,
- третьи средства измерения скорости транспортного средства.
Согласно общему признаку этой системы, она дополнительно содержит первые средства вычисления контрольного поперечного момента в зависимости от измеряемых угла поворота рулевого колеса и скорости транспортного средства и средства сравнения между прикладываемым поперечным моментом, измеряемым первыми средствами измерения, и контрольным моментом, вычисляемым первыми средствами вычисления.
Действительно, поперечный момент, прикладываемый к управляемым колесам, как правило, зависит в первую очередь от трех параметров, которыми являются состояние накачки шин, скорость транспортного средства и угол поворота рулевого колеса. Зная эти параметры, в данном случае скорость транспортного средства и угол поворота рулевого колеса, можно обнаруживать состояние недостаточной накачки одной из шин, контролируя значение прикладываемого поперечного момента.
В варианте выполнения система обнаружения дополнительно содержит средства индикации тревожного сигнала о недостаточном давлении шины одного из управляемых колес. Кроме того, необходимо отметить, что для обеспечения возможности вычисления контрольного момента он должен быть предварительно введен в картографию путем обучения.
Средства сравнения могут содержать вторые средства вычисления, выполненные с возможностью определения абсолютной разности между измеренным прикладываемым поперечным моментом и вычисленным контрольным моментом, и компаратор, выполненный с возможностью сравнения указанной абсолютной разности с пороговым значением, при этом средства индикации параметрированы таким образом, чтобы выводить тревожный сигнал недостаточного давления шины одного из колес, если абсолютная разность превышает пороговое значение.
Например, средства сравнения включают в себя средства запоминания и вычисления первого среднего нескольких прикладываемых поперечных моментов, измеренных в разные моменты времени, и второго среднего контрольных поперечных моментов, вычисленных в зависимости от углов поворота рулевого колеса и от скоростей в эти же моменты времени, при этом вторые средства вычисления вычисляют абсолютную разность между первым средним и вторым средним.
В другом варианте выполнения автотранспортное средство оборудовано рулевым управлением с электрическим усилителем и датчиком момента, находящимся в рулевой колонке, выполненным с возможностью измерения момента, задаваемого водителем, при этом первые средства измерения содержат третьи средства вычисления для вычисления поперечного момента, прикладываемого к рулевым колесам, на основании момента, задаваемого водителем, и момента, прикладываемого рулевым управлением с электрическим усилителем.
Следует отметить, что информация о моменте, задаваемом водителем, в реальности является моментом, который он сам прикладывает к рулевому колесу. Это заданное значение воспринимается рулевым управлением с электрическим усилителем, которое передает усиленный момент рулевого управления, добавляемый к задаваемому моменту для последующей передачи на колеса транспортного средства.
Первые средства вычисления могут также содержать картографию, в которой сохраняются значения контрольного момента в зависимости от скорости транспортного средства и от угла поворота рулевого колеса, и первое средство передачи сигнала активации обучения, при этом при передаче сигнала активации обучения сохраненная характеристика может измениться.
Согласно другому отличительному признаку, первые средства вычисления содержат вторые средства передачи сигнала переустановки и четвертые средства вычисления, выполненные с возможностью вычисления расстояния, пройденного транспортным средством с момента последней передачи сигнала переустановки, при этом первые средства передачи выполнены с возможностью передачи сигнала активации обучения, если указанное пройденное расстояние меньше 1 км.
Вторые средства передачи могут также содержать кнопку переустановки или устройство обнаружения подкачки по меньшей мере одной из шин автотранспортного средства.
В еще одном варианте выполнения первые средства вычисления дополнительно содержат второй датчик, выполненный с возможностью передачи сигнала блокировки, если транспортное средство находится на наклонном пути или на наклонном повороте под углом, превышающим заранее определенное значение угла, и/или третий датчик, выполненный с возможностью передачи второго сигнала блокировки, если продольный момент, действующий на транспортное средство, превышает заранее определенное значение момента, и/или четвертый датчик, выполненный с возможностью передачи третьего сигнала блокировки, если транспортное средство не стоит или не находится на выходе из поворота, и третье средство передачи, выполненное с возможностью передачи сигнала выключения средств сравнения и первых средств передачи, когда передается по меньшей мере один из трех сигналов блокировки, таким образом, чтобы нельзя было передать тревожный сигнал недостаточного давления шины и чтобы во время передачи сигнала выключения нельзя было изменить картографию.
Например, четвертый датчик содержит пятые средства вычисления, выполненные с возможностью вычисления абсолютной величины угла поворота рулевого колеса и производной угла поворота рулевого колеса, второй компаратор для сравнения вычисленной абсолютной величины с заранее определенным значением угла, четвертый датчик, сигнализирующий о выходе из поворота, когда вычисленная производная угла поворота рулевого колеса и угол поворота рулевого колеса имеют противоположные знаки и когда абсолютная величина угла поворота рулевого колеса превышает заранее определенное значение угла.
Объектом изобретения является также способ обнаружения состояния накачки по меньшей мере одной из шин управляемых колес автотранспортного средства, характеризующийся тем, что содержит первую фазу обучения картографии, в которой сохраняют значения контрольного поперечного момента в зависимости от угла поворота рулевого колеса и от скорости транспортного средства, и второй этап сравнения, - для угла поворота рулевого колеса и скорости транспортного средства, измеренных в данный момент времени, - поперечного момента, прикладываемого в данный момент времени, с контрольным моментом, вычисленным на основании характеристики, полученной во время первой фазы.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - схема работы системы обнаружения согласно варианту выполнения изобретения.
Фиг. 2 - детальная схема работы средств сравнения системы обнаружения, показанной на фиг. 1.
Фиг. 3 - детальная схема работы первых средств вычисления системы обнаружения, показанной на фиг. 1.
Фиг. 4 - детальная схема работы четвертого датчика средств вычисления, показанных на фиг. 3.
Фиг. 5 - пояснительная схема к описанию фиг. 3 и 4.
Фиг. 6 - способ обнаружения недостаточного давления шины согласно варианту выполнения изобретения.
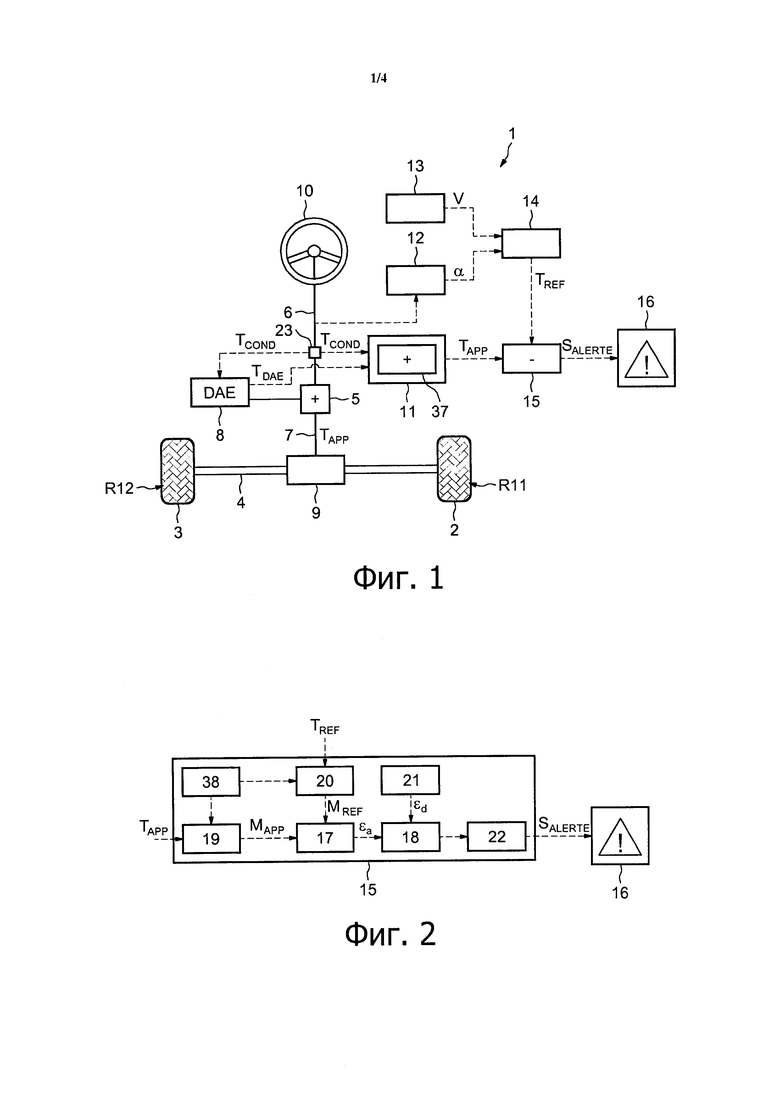
На фиг. 1 показана схема работы системы 1 обнаружения недостаточного давления шины по меньшей мере одного из колес автотранспортного средства.
В частности, на фиг. 1 показана система обнаружения недостаточного давления шин 2 и 3 управляемых колес R11 и R12 автотранспортного средства, связанных с колесной осью 4. Транспортное средство оснащено рулевой колонкой 5, содержащей первый конец 6, неподвижно соединенный с рулевым колесом 10 транспортного средства, и второй конец 7. Механизм 9 преобразования движения преобразует поперечный момент второго конца 7 рулевой колонки 9 в продольное усилие, предназначенное для поворачивания колес R11 и R12 вокруг вертикальной оси.
В этом примере транспортное средство содержит рулевое управление 8 с электроусилителем DAE. Рулевое управление с электроусилителем работает следующим образом. На первом этапе датчик 23 момента, находящийся на первом конце 6 рулевой колонки, измеряет момент Tcond, задаваемый водителем. Эта информация поступает в средство вычисления, включенное в рулевое управление 8 с электроусилителем. На втором этапе средство вычисления вычисляет заданное значение момента TDAE, предназначенного для приложения электрическим приводом. Это значение момента выводится непосредственно из момента, задаваемого водителем, и из скорости транспортного средства. Механизм, включенный в рулевую колонку, например, эпициклоидная передача, позволяет суммировать эти два момента Tcond и TDAE и создает поперечный момент TAPP, прикладываемый к колесам транспортного средства. На третьем этапе прикладываемый к колесам момент TAPP автоматически регулируется системой регулирования в замкнутом контуре.
Таким образом, можно легко получить значение поперечного момента TAPP, прикладываемого к управляемым колесам. Для этого система 1 обнаружения содержит первые средства 11 измерения поперечного момента TAPP. Средства 11 содержат модуль, получающий момент Tcond, задаваемый водителем, прикладываемый к рулевому колесу и измеряемый датчиком 23 момента. Они содержат также модуль, получающий заданное значение момента TDAE, вычисляемое средством вычисления рулевого управления 8 с электроусилителем. Эти первые средства измерения дополнительно содержат операционный блок 37, выполненный с возможностью суммирования двух сигналов Tcond и TDAE таким образом, чтобы первое средство 11 измерения обнаружило поперечный момент TAPP, прикладываемый к управляемым колесам.
Система обнаружения содержит также вторые средства 12 измерения, включающие в себя датчик, выполненный с возможностью определения угла α поворота рулевого колеса, и третьи средства 13 измерения, выполненные с возможностью считывания сигнала скорости V транспортного средства по отношению к наземной системе координат.
Система дополнительно содержит первые средства 14 вычисления, содержащие картографию, детально показанную на фиг. 3. Первые средства 14 вычисления выдают значение контрольного момента TREF в зависимости от:
- угла α поворота рулевого колеса, выдаваемого вторыми средствами 12 измерения, и
- скорости V транспортного средства, выдаваемой третьими средствами 13 измерения.
Вычисленный таким образом контрольный момент TREF соответствует поперечному моменту, прикладываемому к управляемым колесам, при данных угле α поворота рулевого колеса и скорости V транспортного средства и при оптимальном состоянии накачки шин управляемых колес.
Кроме того, система содержит средства 15 сравнения, выполненные с возможностью сравнивать прикладываемый поперечный момент TAPP и контрольный момент TREF. Средства 15 сравнения, детально показанные на фиг. 2, выполнены, в частности, с возможностью обнаружения слишком большой абсолютной разности между прикладываемым TAPP и контрольным TREF моментами и с возможностью передачи в этом случае тревожного сигнала SALERTE. Действительно, в определенных условиях поперечный момент TAPP, прикладываемый к управляемым колесам, в первую очередь зависит от трех параметров, которыми являются давление шин управляемых колес, угол α поворота рулевого колеса и скорость V транспортного средства. Сравнивая два значения прикладываемого TAPP и контрольного TREF поперечных моментов при одинаковом угле α поворота рулевого колеса и при одинаковой скорости V транспортного средства, в этих условиях можно получить информацию о состоянии недостаточной накачки по меньшей мере одной из шин. Таким образом, тревожный сигнал SALERTE, выдаваемый средствами 15 сравнения, свидетельствует о недостаточном давлении по меньшей мере одной из шин управляемых колес транспортного средства.
При этом система содержит средства 16 индикации, встроенные в бортовой экран транспортного средства, чтобы информировать водителя о передаче тревожного сигнала недостаточного давления, выдаваемого средствами 15 сравнения.
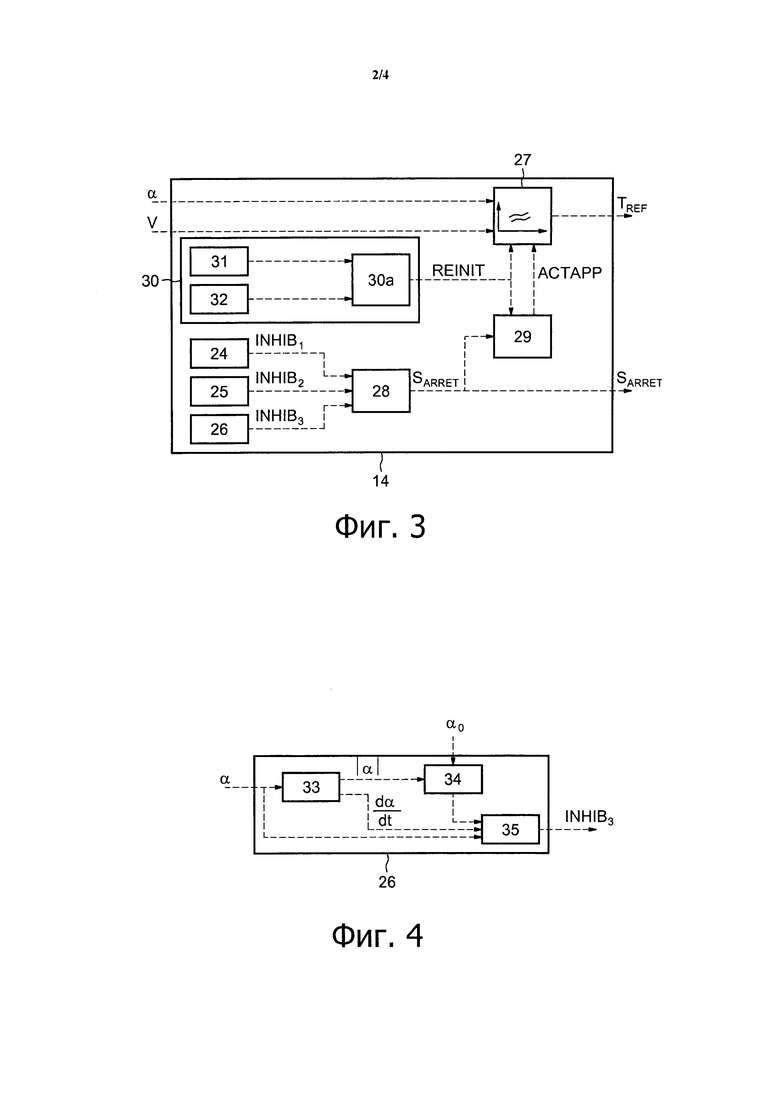
На фиг. 2 показаны различные элементы, входящие в состав средств 15 сравнения системы обнаружения недостаточного давления, показанной на фиг. 1.
Следует напомнить, что элементы 15 сравнения выдают тревожный сигнал SALERTE в зависимости от сигналов контрольного момента TREF, вычисляемого первыми средствами 14 вычисления, и поперечного момента TAPP, прикладываемого к управляемым колесам. В этом примере средства 15 сравнения сравнивают среднее нескольких значений контрольного момента TREF, вычисленных в различные моменты времени, со средним нескольких значений прикладываемого поперечного момента TAPP, измеренных в эти же моменты времени. Тревожный сигнал SALERTE выдают, когда разность между средним значений TREF и средним значений TAPP является слишком большой по сравнению с пороговым значением εd. Измерение разности между средними значений позволяет повысить надежность системы обнаружения.
Для этого элементы 15 сравнения содержат первое устройство 19 вычисления среднего значения и второе устройство 20 вычисления среднего значения, связанные с часовым устройством 38. Устройство 38 создает список моментов времени (t1, t2, …, tn). Первое устройство 19 вычисления среднего значения содержит модуль, выполненный с возможностью получения и сохранения значений поперечных моментов TAPP в различные моменты времени из списка, определенного часовым устройством 38. Параллельно, второе устройство 20 вычисления среднего значения получает и сохраняет значения контрольных моментов TREF, вычисленных первыми средствами 14 вычисления в зависимости от угла α поворота рулевого колеса и от скорости V транспортного средства в моменты времени из этого списка. Затем первое устройство 19 вычисления среднего значения вычисляет среднее для сохраненных в его памяти значений TAPP и выдает первый сигнал среднего значения MAPP для сохраненных в памяти прикладываемых поперечных моментов. Параллельно, второе устройство 20 вычисления среднего значения вычисляет среднее для сохраненных в его памяти значений TREF и выдает второй сигнал среднего значения MREF для сохраненных в памяти контрольных моментов.
Средства 15 сравнения включают в себя вторые средства 17 вычисления, выполненные с возможностью выдавать выходной сигнал, отображающий абсолютную разность εa между первым средним значением MAPP и вторым средним значением MREF. Под абсолютной разностью следует понимать абсолютную величину разности между двумя сигналами.
Кроме того, элементы 15 сравнения включают в себя средства 21 определения порога недостаточности εd. Этот порог недостаточности соответствует предельному значению для абсолютной разности εa, начиная от которого считается, что состояние накачки по меньшей мере одной из шин управляемых колес транспортного средства является недостаточным. В этом примере конструктор автотранспортного средства определяет заранее и параметрирует порог недостаточности εd при помощи средств 21 определения.
Таким образом, элементы 15 сравнения оснащены компаратором 18, выполненным таким образом, чтобы сравнивать абсолютную разность εа и порог недостаточности εd. Генератор 22 тревожного сигнала получает напрямую выходной сигнал компаратора 18, чтобы выдать тревожный сигнал SALERTE, если и только если абсолютная разность εa больше, чем порог недостаточности εd.
Таким образом, средства 15 сравнения выполнены с возможностью выдавать тревожный сигнал SALERTE недостаточности состояния накачки по меньшей мере одной из шин управляемых колес автотранспортного средства в зависимости от контрольного момента TREF, вычисленного первыми средствами 14 вычисления, и прикладываемого поперечного момента TAPP, определенного первыми средствами 11 измерения.
Как показано на фиг. 2, тревожный сигнал поступает в средства 16 индикации с целью оповещения водителя транспортного средства.
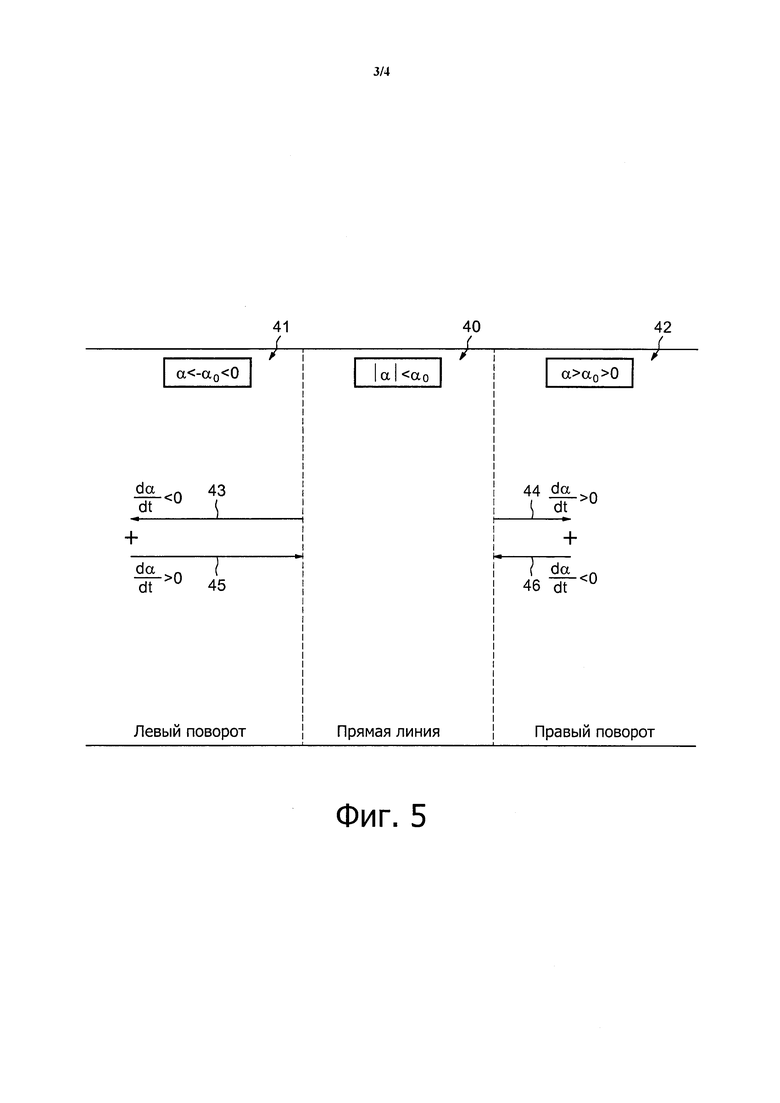
На фиг. 3 детально показаны первые средства 14 вычисления системы обнаружения, показанной на фиг. 1. Эти средства вычисления выдают на выходе сигнал TREF контрольного момента, вычисленного в зависимости от угла α поворота рулевого колеса, определенного вторыми средствами 12 измерения, и от скорости V транспортного средства, определенной третьими средствами 13 измерения. Первые средства 14 вычисления выполнены также с возможностью выдавать сигнал выключения SARRET системы в зависимости от двух вышеупомянутых входных данных.
Во-первых, первые средства 14 вычисления содержат картографию 27, в которой хранятся значения контрольного момента TREF в зависимости от угла α поворота рулевого колеса и от скорости V транспортного средства. Согласно одному из частных признаков, картография 27 может изменяться. Это значит, что она может работать в первом режиме работы, в котором она выдает значение контрольного момента TREF в зависимости от угла α поворота рулевого колеса и от скорости V, и во втором режиме работы, в котором она собирает и сохраняет значения поперечного момента TAPP, прикладываемого к управляемым колесам, в дополнение к значениям угла α поворота рулевого колеса и скорости V транспортного средства. Таким образом, различают первый режим работы, соответствующий использованию значений, хранящихся в картографии 27, и второй режим работы, соответствующий обучению картографии 27. Наконец, картография может получать команду на переустановку всех значений.
Первые средства 14 вычисления содержат первое средство 29 передачи, выполненное с возможностью выдавать сигнал АСТАРР активации обучения картографии 27. Картография параметрирована таким образом, чтобы работать в своем втором режиме работы, называемом режимом обучения, если и только если первое средство 29 передачи выдает сигнал АСТАРР.
Средства 14 вычисления оснащены также вторыми средствами 30 передачи сигнала переустановки REINIT значений, хранящихся в картографии 27. В частности, вторые средства 30 передачи содержат устройство 32 обнаружения подкачки шин, кнопку 31 переустановки и средство 30а вычисления, в данном случае логический оператор ИЛИ. Таким образом, сигнал переустановки REINIT появляется после подкачки шин или после конкретной команды пользователя. Таким образом, переустановка картографии 27 происходит, если и только если соблюдено по меньшей мере одно из этих условий. Сигнал REINIT предназначен также для средств 29 передачи. Действительно, средства 29 передачи выдают сигнал активации обучения АСТАРР сразу после получения сигнала REINIT. Кроме того, средства 29 передачи содержат модуль для определения расстояния, пройденного транспортным сигналом с момента последней передачи сигнала REINIT. В этом примере этот модуль является средством вычисления, выполненным с возможностью умножения скорости транспортного средства, считанной третьими средствами 13 измерения, на время, прошедшее с момента последней передачи сигнала REINIT. Наконец, в этом примере средства 29 передачи параметрированы для выдачи сигнала АСТАРР между передачей сигнала REINIT и моментом времени, когда транспортное средство прошло в данном случае 1 км с момента передачи последнего сигнала REINIT.
Кроме того, средства 14 вычисления содержат датчик 24, выполненный с возможностью определять, что транспортное средство находится на наклонном пути под углом, превышающим заранее определенное значение угла, или на наклонном повороте под углом, превышающим заранее определенное значение угла. Если датчик 24 действительно обнаруживает одну из этих ситуаций, он выдает сигнал INHIB1 блокировки. Средства 14 вычисления содержат также датчик 25, выполненный с возможностью обнаруживать, что транспортное средство подвергается действию продольного момента, превышающего заранее определенное значение момента. При обнаружении такого случая выдается сигнал INHIB2. Наконец, средства 14 вычисления содержат датчик 26, выполненный с возможностью обнаруживать, что транспортное средство находится на выходе из поворота или стоит на месте. Сигнал LNHIB3 выдается, если и только если транспортное средство не находится на выходе из поворота и не стоит на месте.
Наконец, средства 14 вычисления содержат третьи средства 28 передачи сигнала SARRET выключения системы. В частности, средства 28 передачи содержат логический операционный блок ИЛИ, и сигнал SARRET выключения появляется, когда выдается один из трех сигналов блокировки, то есть когда датчики 24, 25 и 26 обнаруживают по меньшей мере одну из следующих трех ситуаций:
- наклон пути или наклон поворота, которые считаются значительными,
- продольный момент, который считается значительным,
- ситуация, в которой транспортное средство не находится на выходе из поворота и не стоит на месте. Сигнал SARRET выключения системы предназначен, с одной стороны, для блокировки работы первых средств 29 передачи сигнала активации обучения АСТАРР и, с другой стороны, для блокировки работы средств 13 сравнения. Таким образом, в конкретных условиях не может происходить ни изменение картографии 27, ни передача тревожного сигнала SALERTE недостаточности давления шин колес транспортного средства.
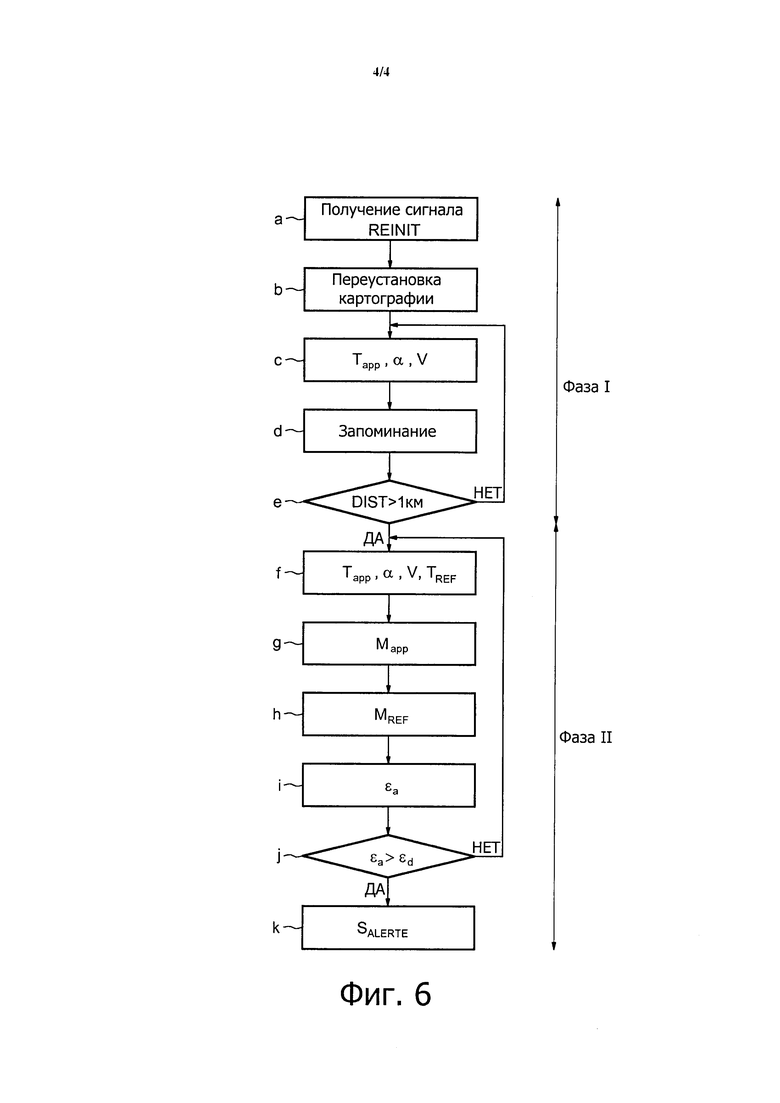
Как показано на фиг. 4, где детально показан датчик 26 обнаружения выхода из поворота, включенный в средства 14 вычисления, показанные на фиг. 3, такой датчик 26 выполнен на базе средств 33 вычисления, получающих сигнал угла α поворота рулевого колеса. Средства 33 вычисления выполнены с возможностью вычисления производной dα/dt угла поворота рулевого колеса по времени, а также абсолютной величины ⎪α⎪. Датчик 26 получает также новый входной параметр α0, соответствующий положительному значению угла, заранее определенному конструктором. Компаратор 34 сравнивает сигналы ⎪α⎪ и α0. Датчик 26 содержит средства 35 вычисления, включающие в себя модуль, выполненный с возможностью сравнения знака производной dα/dt угла поворота рулевого колеса и знака угла α поворота рулевого колеса.
На фиг. 5 представлены три ситуации управления, в которых может оказаться транспортное средство. Первое состояние 40 соответствует состоянию на прямой линии. В этом состоянии абсолютная величина ⎪α⎪ угла поворота рулевого колеса меньше заранее определенного значения угла α0. Второе состояние 41 соответствует состоянию поворота налево. В этом состоянии угол α поворота рулевого колеса меньше противоположной величины положительного значения угла α0, определенного конструктором. Третье и последнее состояние 42 соответствует состоянию поворота направо. В этом состоянии угол α поворота рулевого колеса больше положительного значения угла α0, определенного конструктором. При любом α в состоянии поворота направо α будет положительным. В состоянии поворота налево α является отрицательным. Переходы из одного состояния в другое показаны на фиг. 5 четырьмя стрелками 43-46. Переход из состояния на прямой линии в состояние поворота называют вписыванием в поворот, а обратный переход называют выходом из поворота. Стрелка 43 показывает вписывание в поворот налево. Угол α поворота рулевого колеса уменьшается, следовательно, производная dα/dt угла поворота рулевого колеса является отрицательной. Стрелка 44 показывает вписывание в поворот направо с положительной производной угла поворота рулевого колеса. Стрелки 45 и 46 показывают соответственно выход из левого поворота с положительной производной угла поворота рулевого колеса и выход из правого поворота с отрицательной производной угла поворота рулевого колеса.
В конечном итоге считают, что присутствует состояние выхода из поворота, если и только если соблюдены два следующих условия:
- производная dα/dt угла поворота рулевого колеса относительно времени имеет противоположной знак по отношению к углу α поворота рулевого колеса, и
- абсолютная величина ⎪α⎪ угла поворота рулевого колеса превышает заранее определенное значение угла α0.
Таким образом, средства 35 вычисления содержат логический оператор ИЛИ и логический оператор НЕТ, выдающие сигнал INHIB3, если и только если транспортное средство не стоит на месте и ни одно из условий, упомянутых в предыдущем абзаце, не соблюдено.
Сигнал INHIB3 представляет особый интерес, так как препятствует работе картографии 27 в режиме выработки и не позволяет средствам 15 сравнения обнаруживать состояние недостаточной накачки. Сигнал INHIB3 выдается, когда транспортное средство не выходит из поворота и не стоит на месте.
Действительно, поперечный момент TAPP, прикладываемый к управляемым колесам, зависит от нескольких параметров, которые различаются в зависимости от следующих четырех ситуаций:
- когда транспортное средство стоит на месте, прикладываемый поперечный момент TAPP в первую очередь зависит от угла α поворота рулевого колеса и от давления шин,
- когда транспортное средство движется по прямой линии со скоростью V, то есть когда абсолютная величина |α| угла поворота рулевого колеса меньше значения α0, прикладываемый поперечный момент TAPP не зависит от давления в шинах,
- когда транспортное средство движется со скоростью V и вписывается в левый или в правый поворот, прикладываемый поперечный момент TAPP зависит, не считая скорости V, угла α поворота рулевого колеса и давления шин, от других факторов, которые трудно характеризовать количественно, так как они чрезвычайно зашумлены, и
- когда транспортное средство движется со скоростью V на выходе из левого или правого поворота, прикладываемый поперечный момент TAPP в первую очередь зависит от скорости V, от угла α поворота рулевого колеса и от давления шин.
Таким образом, понятно, что хорошей корреляции между прикладываемым поперечным моментом TAPP и состоянием накачки шин можно добиться, только когда транспортное средство стоит на месте или движется со скоростью V на выходе из поворота. Следовательно, датчик 26 выполняет функцию блокировки средств 15 сравнения и механизма обучения картографии 27, если условия не являются надлежащими.
Можно также считать, что, когда транспортное средство движется на низкой скорости, например, менее 9 км/ч, прикладываемый поперечный момент TAPP зависит от угла α поворота рулевого колеса и от давления шин так же, как когда транспортное средство стоит на месте. Таким образом, не выходя за рамки изобретения, можно изменить датчик 26 таким образом, чтобы он не выдавал сигнала блокировки INHIB3, если транспортное средство движется на низкой скорости.
Следует отметить, что изобретение можно применить в электронном блоке управления транспортным средством или в любом вычислительном устройстве, содержащем процессор и установленном на транспортном средстве.
Объектом изобретения является также способ обнаружения состояния накачки шин колес автотранспортного средства.
На фиг. 6 представлен способ согласно варианту осуществления изобретения, применяемый при помощи устройства, показанного на фиг. 1-4. Способ начинается с момента обнаружения подкачки шин устройством 32 обнаружения или при нажатии на кнопку 31 переустановки.
Способ содержит первую фазу I обучения картографии 27 и вторую фазу II вычисления и сравнения.
Рассмотрим первую фазу I обучения картографии.
Способ начинается с этапа а) при получении сигнала REINIT переустановки. Этот сигнал выдают вторые средства 30 передачи.
За этим этапом следует этап b) сброса данных на ноль, на котором стираются все данные, сохраненные в картографии 27.
На следующем этапе с) применяют средства 11, 12 и 13 измерения и измеряют прикладываемый поперечный момент TAPP, угол α поворота рулевого колеса и скорость V транспортного средства.
После этого осуществляют этап d), во время которого картография 27 принудительно работает во втором рабочем режиме. Иначе говоря, в памяти сохраняют значения прикладываемого поперечного момента TAPP для разных значений угла α поворота рулевого колеса и скорости V транспортного средства, измеренных на этапе с). После этого этапа d) осуществляют тестовый этап е).
В ходе тестового этапа е) вычисляют расстояние DIST, пройденное транспортным средством с конца этапа а). Если это расстояние DIST меньше расстояния, заранее определенного конструктором, в данном случае 1 км, возвращаются на этап с). Если оно превышает 1 км, фазу обучения картографии 27 завершают и переходят к этапу f).
Таким образом, фаза II сравнения начинается с этапа f) измерения и запоминания значений прикладываемого поперечного момента TAPP, угла α поворота рулевого колеса и скорости V транспортного средства в различные моменты времени. Этот этап начинается с первого подэтапа генерирования последовательности (t1, t2, …, tn) моментов времени часовым механизмом 38. Каждый из этих моментов времени представляет собой новый подэтап. В ходе каждого из подэтапов измеряют прикладываемый поперечный момент TAPP, угол α поворота рулевого колеса и скорость V транспортного средства и эти значения сохраняют в первом, втором и третьем списках, каждый из которых содержит n элементов, отображающих соответственно значения TAPP, α и V. На последнем подэтапе вычисляют четвертый список значений TREF на основании второго и третьего списков при помощи средств 14 вычисления. По завершении этапа f) получают список L1 значений прикладываемого поперечного момента TAPP, измеренного в разные моменты времени, и список 1, 2 значений контрольного момента TREF, вычисленного в эти же моменты времени.
На следующем этапе g) вычисляют среднее значение MAPP для значений списка L1 прикладываемых поперечных моментов. В этом примере используют устройство 19 вычисления среднего значения.
Следующий этап h) состоит в вычислении среднего значения MREF для значений списка L2 контрольных моментов. В этом примере вычисление производят при помощи устройства 20 вычисления среднего значения.
Затем способ содержит этап i), на котором вычисляют абсолютную разность εa между двумя средними значениями MAPP и MREF, вычисленными на двух этапах g) и h). В частности, абсолютная разность εа является абсолютной величиной разности указанных средних значений. Этот этап осуществляют при помощи средств 15 сравнения.
По завершении этого этапа i) во время тестового этапа j) сравнивают абсолютную разность εа с заранее определенным порогом εd недостаточности. Если разность εа меньше порога εd, возвращаются на первоначальный этап фазы II, то есть повторяют этапы способа, начиная с этапа f). Если разность εa превышает порог εd, переходят на этап k).
Этап k) соответствует передаче тревожного сигнала SALERTE. В данном случае тревожный сигнал поступает в средство 16 индикации, которое оповещает водителя о состоянии недостаточной накачки по меньшей мере одной из шин транспортного средства.
Таким образом, при помощи такого устройства или такого способа можно обнаруживать недостаточность состояния накачки по меньшей мере одной из шин колес транспортного средства, не устанавливая датчик давления на шинах. Используя в основном измерения поперечного момента TAPP, прикладываемого к управляемым колесам, угла α поворота рулевого колеса и скорости V транспортного средства, можно применять датчики, которые уже установлены на обычных транспортных средствах, оборудованных рулевым управлением с электроусилителем. Вычисляя абсолютную разность между средним значением для нескольких значений прикладываемого поперечного момента и средним значением для нескольких значений контрольного момента, повышают надежность системы и способа обнаружения. Используя датчики, выполненные с возможностью блокировки системы, если транспортное средство не стоит на месте и не выходит из поворота или если оно находится на наклонном прямом пути или на наклонном повороте со слишком большими углами наклона или если оно подвергается действию слишком большого продольного момента, сводят к минимуму риски нарушения работы картографии 27 или ложной тревоги.
Изобретение относится к автомобильному транспорту. Система (1) обнаружения состояния накачки по меньшей мере одной из шин (2, 3) управляемых колес (R11, R12) автотранспортного средства содержит: первые средства (11) измерения поперечного момента (TAPP), прикладываемого к управляемым колесам, вторые средства (12) измерения угла (α) поворота рулевого колеса, третьи средства (13) измерения скорости (V) транспортного средства. Система дополнительно содержит первые средства (14) вычисления контрольного поперечного момента (TREF) в зависимости от измеряемых угла (α) поворота рулевого колеса и скорости (V) транспортного средства и средства (15) сравнения между прикладываемым поперечным моментом (TAPP), измеряемым первыми средствами (11) измерения, и контрольным моментом (TREF), вычисляемым первыми средствами (14) вычисления. Технический результат - повышение надежности системы определения давления воздуха в шине. 2 н. и 9 з.п. ф-лы, 6 ил.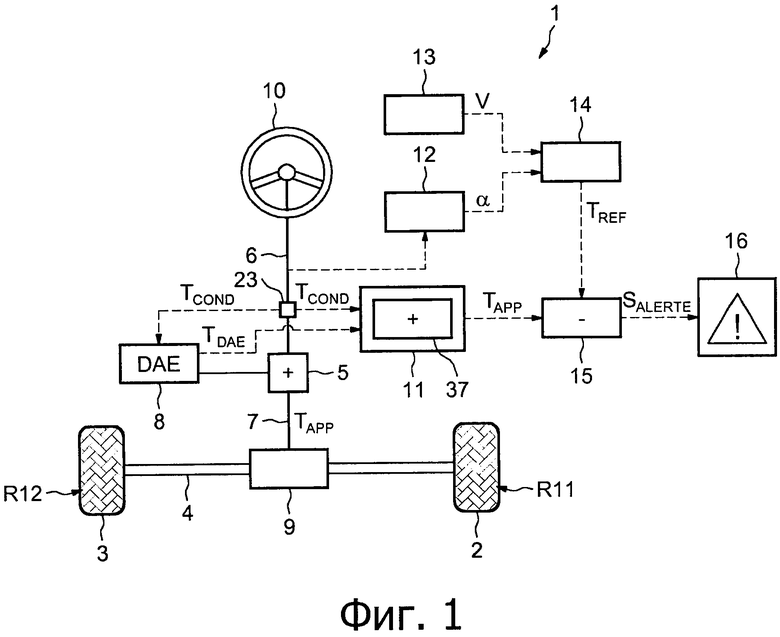
1. Система (1) обнаружения состояния накачки по меньшей мере одной из шин (2, 3) управляемых колес (R11, R12) автотранспортного средства, содержащая:
- первые средства (11) измерения поперечного момента (ТАРР), прикладываемого к управляемым колесам,
- вторые средства (12) измерения угла (α) поворота рулевого колеса,
- третьи средства (13) измерения скорости (V) транспортного средства,
отличающаяся тем, что дополнительно содержит первые средства (14) вычисления контрольного поперечного момента (TREF) в зависимости от измеряемых угла (α) поворота рулевого колеса и скорости (V) транспортного средства и средства (15) сравнения между прикладываемым поперечным моментом (ТАРР), измеряемым первыми средствами (11) измерения, и контрольным моментом (TREF), вычисляемым первыми средствами (14) вычисления.
2. Система обнаружения по п. 1, отличающаяся тем, что дополнительно содержит средства (16) индикации тревожного сигнала о недостаточном давлении шины одного из управляемых колес.
3. Система обнаружения по п. 1, отличающаяся тем, что средства (15) сравнения содержат вторые средства (17) вычисления, выполненные с возможностью определения абсолютной разности (εa) между измеренным прикладываемым поперечным моментом (ТАРР) и вычисленным контрольным моментом (TREF), и компаратор (18), выполненный с возможностью сравнения указанной абсолютной разности (εа) с пороговым значением (εd), при этом средства (16) индикации выполнены таким образом, чтобы выводить на экран тревожный сигнал недостаточного давления шины одного из колес, если абсолютная разность (εa) превышает пороговое значение (εd).
4. Система обнаружения по п. 1, отличающаяся тем, что средства (15) сравнения включают в себя средства (19, 20) запоминания и вычисления первого среднего значения (MAPP) нескольких прикладываемых поперечных моментов (ТАРР), измеренных в разные моменты времени, и второго среднего значения (MREF) контрольных поперечных моментов (TREF), вычисленных в зависимости от углов (α) поворота рулевого колеса и от скоростей (V) в эти же моменты времени, при этом вторые средства (17) вычисления вычисляют абсолютную разность (εа) между первым средним значением (MAPP) и вторым средним значением (MREF).
5. Система обнаружения по п. 1, отличающаяся тем, что автотранспортное средство оборудовано рулевым управлением (8) с электрическим усилителем и датчиком (23) момента, находящимся в рулевой колонке (5), выполненным с возможностью измерения момента (Tcond), задаваемого водителем, при этом первые средства (11) измерения содержат третьи средства (37) вычисления для вычисления поперечного момента (ТАРР), прикладываемого к рулевым колесам, на основании момента (Tcond), задаваемого водителем, и момента (TDAE), прикладываемого рулевым управлением с электрическим усилителем.
6. Система обнаружения по п. 1, отличающаяся тем, что первые средства (14) вычисления содержат картографию (27), в которой записаны значения контрольного момента (TREF) в зависимости от скорости (V) транспортного средства и от угла (α) поворота рулевого колеса, и первое средство (29) передачи сигнала (АСТАРР) активации обучения, при этом картография (27) является изменяемой при передаче сигнала активации обучения (АКТАРР).
7. Система обнаружения по п. 1, отличающаяся тем, что первые средства (14) вычисления содержат вторые средства (30) передачи сигнала (REINIT) переустановки и четвертые средства вычисления, выполненные с возможностью вычисления расстояния (DIST), пройденного транспортным средством с момента последней передачи сигнала (REINIT) переустановки, при этом первые средства (29) передачи выполнены с возможностью передачи сигнала активации обучения (АСТАРР), если указанное пройденное расстояние (DIST) меньше 1 км.
8. Система обнаружения по п. 7, отличающаяся тем, что вторые средства (30) передачи содержат кнопку (31) переустановки или устройство (32) обнаружения подкачки по меньшей мере одной из шин автотранспортного средства.
9. Система обнаружения по п. 7, отличающаяся тем, что первые средства (14) вычисления дополнительно содержат второй датчик (24), выполненный с возможностью передачи сигнала (INHIB1) блокировки, если транспортное средство находится на наклонном пути или на наклонном повороте под углом, превышающим заранее определенное значение угла, и/или третий датчик (25), выполненный с возможностью передачи второго сигнала (INHIB2) блокировки, если продольный момент, действующий на транспортное средство, превышает заранее определенное значение момента, и/или четвертый датчик (26), выполненный с возможностью передачи третьего сигнала (INHIB3) блокировки, если транспортное средство не стоит на месте или не находится на выходе из поворота, и третье средство (28) передачи, выполненное с возможностью передачи сигнала (ARRSYS) выключения средств (15) сравнения и первых средств (29) передачи, когда передается по меньшей мере один из трех сигналов (INHIB1, INHIB2, INHIB3) блокировки, таким образом, чтобы нельзя было передать тревожный сигнал (SALERTE) недостаточного давления шины и чтобы во время передачи сигнала (ARRSYS) выключения нельзя было изменить картографию (27).
10. Система обнаружения по п. 7, отличающаяся тем, что четвертый датчик (26) содержит пятые средства (33) вычисления, выполненные с возможностью вычисления абсолютной величины (|α|) угла поворота рулевого колеса и производной (dα/dt) угла поворота рулевого колеса, второй компаратор (34) для сравнения вычисленной абсолютной величины (|α|) угла поворота рулевого колеса с заранее определенным значением (α0) угла, четвертый датчик (26), сигнализирующий о выходе из поворота, когда вычисленная производная (dα/dt) угла поворота рулевого колеса и угол (α) поворота рулевого колеса имеют противоположные знаки и когда абсолютная величина (|α|) угла поворота рулевого колеса превышает заранее определенное значение (α0) угла.
11. Способ обнаружения состояния накачки по меньшей мере одной из шин управляемых колес автотранспортного средства, содержащий первую фазу (I) обучения картографии, на которой сохраняют значения контрольного поперечного момента (TREF) в зависимости от угла (α) поворота рулевого колеса и от скорости (V) транспортного средства, и второй этап (II) сравнения, на котором для угла (α) поворота рулевого колеса и скорости (V) транспортного средства, измеренных в заданный момент времени, сравнивают поперечный момент (ТАРР), прикладываемый в заданный момент времени, с контрольным моментом (TREF), вычисленным при помощи картографии, полученной во время первой фазы (I).
| DE 19959554 A1, 21.12.2000 | |||
| DE 102006060844 A1, 26.06.2008 | |||
| DE 10243913 A1, 18.12.2003 | |||
| DE 102007014765 A1, 02.10.2008. |

