Способ передискретизации зарегистрированных облаков точек в полярных координатах без потери изначальной структуры относится к области обработки и отображения пространственной информации и может быть использован при обработке облаков точек, состоящих из большого количества точек стояния, в частности при сканировании больших промышленных и гражданских зданий и сооружений.
Известен способ «Методы и аппаратура для трехмерной (3D) визуализации» [US9915733B2]. Метод описывает создание 3-мерных сцен, состоящих из нескольких облаков точек с перекрытием с предварительной оптимизацией сцены с помощью передискретизации для получения регулярной структуры сцены.
Недостаток данного способа заключается в том, что после регистрации и создания подбора оптимальных точек для сцены, не сохраняется информация о первоначальной привязке каждой точки.
Наиболее близким к заявляемой полезной модели является способ автоматической регистрации наземных станций сканирования [CN103983963B]. Данный способ описывает автоматическую регистрацию облаков точек наземного сканирования, и в последствии объединение данных облаков точек в одно общее облако точек в прямоугольных координатах.
Недостаток данного способа заключается в том, что после регистрации не сохраняется исходная привязка облаков точек к наземным станциям, что значительно усложняет последующую обработку ввиду невозможности применения алгоритмов расчёта нормалей с учётом их направлений, основанных на координатах станции.
Таким образом, технической проблемой, на решение которой направлено изобретение, является создание зарегистрированного передискретезированного облака точек, в котором сохранена изначальная привязка каждой точки облака точке к точке сканирования, с которой была получена данная точка.
Решение указанной технической проблемы достигается тем, что перед проведением передискретезации зарегистрированного облака точек, создаётся отдельный файл, содержащий координаты точек сканирования, и для каждой точки, добавляется свойство «точка сканирования».
Технический результат заключается в том, что после регистрации и передискретезации конченого облака точек, можно провести разделение на первоначальные облака точек с привязкой к конкретной точке сканирования, и работать с ними по-отдельности, при этом, без уменьшения плотности ниже изначальных облаков.
На прилагаемых к описанию фигурах дано:
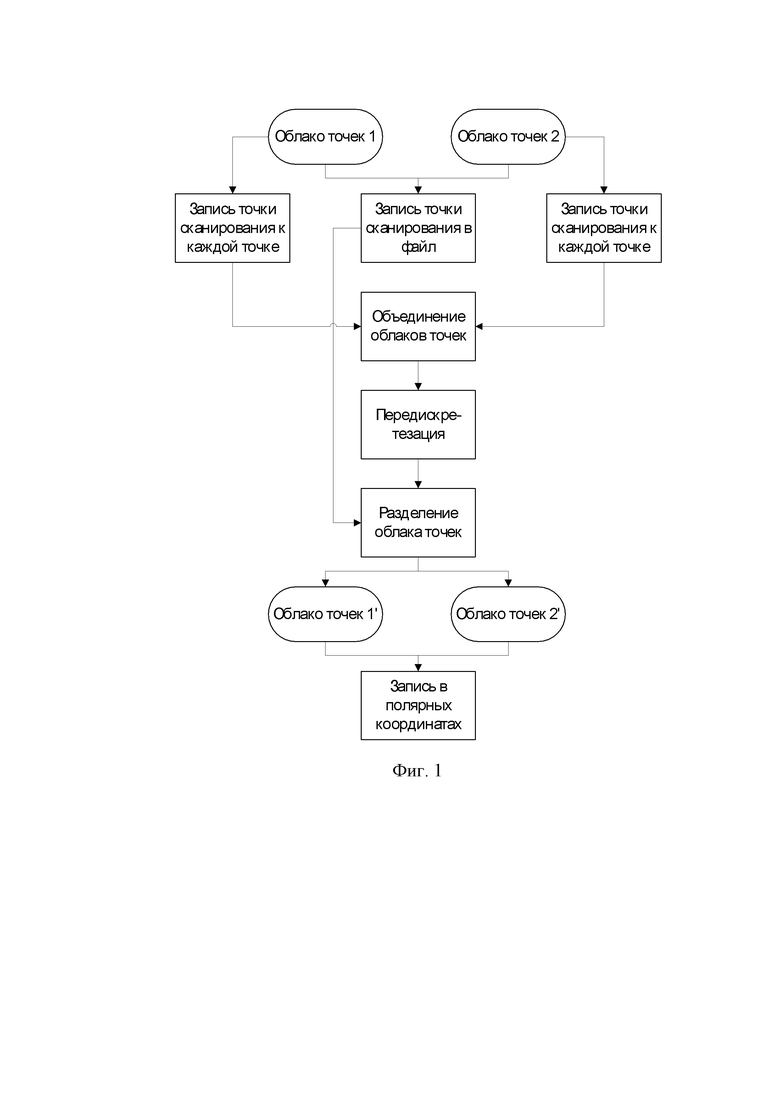
На фиг. 1 показана блок схема алгоритма. Описывает алгоритм осуществления изобретения.
На фиг. 2. Показано исходное облако точек 1. Облако, состоящее из: 6 371 871 точек.
На фиг. 3. Показано исходное облако точек 2. Облако, состоящее: 6 547 433 точек.
На фиг. 4. Показано зарегистрированное облако точек по способу прототипа. После применения метода ускоренной регистрации данных, описанного в прототипе, размер облаков точек составил 12 919 304 точек
На фиг. 5. Показано зарегистрированное облако точек предложенным способом. После применения метода ускоренной регистрации данных, описанного данном способе, размер облаков точек составил 7 233 115 точек.
На фиг. 6. Показано исходное облако точек 1 после обработки. Размер облака точек составил 3 568 411 точек.
На фиг. 7. Показано исходное облако точек 2 после обработки. Размер облака точек составил 3 664 704 точек.
Способ осуществляется следующим образом: есть 2 облака точек, облако точек 1 (фиг 2) и облако точек 2 (фиг. 3). На них присутствует один и тот же объект городской застройки, отсканированный с разных положений с перекрытием порядка 60%. Облака точек содержат следующие поля: координата по X, координата по Y, координата по Z, интенсивность отраженного сигнала, компонента красного цвет, компонента зелёного цвета, компонента синего цвета, X составляющая нормали в точке (может быть равна 0 в случае отсутствия), Y составляющая нормали в точке (может быть равна 0 в случае отсутствия), Z составляющая нормали в точке (может быть равна 0 в случае отсутствия). К данным облакам точек, применяется предварительная регистрация произвольным известным методом. После регистрации (фиг. 4), предлагается изменить структуру данных представленных выше облаков точек. К каждой точке исходных облаков точек, добавляется параметр «точка сканирования». Новая структура данных показана в таблице 1. Добавления нового параметра не окажет существенного влияния на размер облака точек (для записи, достаточно от 4 до 8 (в очень редких случаях 16 бит) данных в то время, как на остальные параметры, необходимо как минимум 1024 бит данных. Вместе с этим, предлагается создавать отдельный файл, куда записывается положение точек сканирования, как показано на таблице 2.
В результате этого, возникает излишняя плотность точек в перекрывающихся областях. Для снижения излишней плотности, предлагается провести передискретезацию. Для проведения передискретезации, необходимо, чтобы все точки находились в одном массиве, для чего, точки объединяются в один массив, где для каждой точки уже добавлен параметр «Номер станции». После объединения, проводится передискретезация, основанная на параметрах сканирующего устройства, таких, как вертикальный и горизонтальный шаг сканирования, которое в свою очередь влияет на легко вычисляемый известный параметр – расстояние между точками в интересующей плоскости. При передискретезации, проводится отсев точек на основании предварительно заданного параметра – минимального расстояния между точками, на основании этого параметра. Все точки, не удовлетворяющие условию – а удаляются (фиг. 5). В результате передисркретезации, можно сократить количество точек, более чем на 30%, в зависимости от процента перекрытия. После проведения передискретезации, производится разделение облака точке на первоначальные облака точек, основываясь на параметре «точка сканирования». После разделения облака точек на первоначальные облака точек, производится перерасчёт их из прямоугольную в полярную систему координат. Сохранение разделенных станций производится в полярных координатах с локальным центром каждого облака точек в точке сканирования данного облака точек, что способствует уменьшению размера ввиду структурированности облака точек. При необходимости их повторной загрузки облаков точек, производится обратное преобразование в прямоугольные координаты.
Таблица 1. Структура данных
Описание полей: X coordinate – координата по X; Y coordinate – координата по Y; Z coordinate – координата по Z; Intensity – интенсивность отраженного сигнала; Red color – компонента красного цвет; Green color – компонента зелёного цвета; Blue color – компонента синего цвета; X scan dir – X составляющая нормали в точке; Y scan dir – Y составляющая нормали в точке; Z scan dir – Z составляющая нормали в точке; Scan pos – указание на точку сканирования, которые записаны в отдельном файле. Является первичным кличем в случае хранения данных в базе данных. Данный параметр остается неизменным для любой точки на всем протяжении обработки.
Таблица 2. Запись положения точек
Описание полей: Scan pos – номер точки (соответствует аналогичному полю в списке точек облака точке); X – координата X пересечения всех оптических осей сканирующего устройства для выбранной точки; Y – координата Y пересечения всех оптических осей сканирующего устройства для выбранной точки; Z – координата Z пересечения всех оптических осей сканирующего устройства для выбранной точки
Пример осуществления способа
Есть облако точек 1, состоящее из: 6 371 871 точек (фиг 2.), и облако, состоящее из 6 547 433 точек (фиг. 3). К каждой точке облака точек 1, добавляется параметр «точка сканирования» - 1, соответственно и с облаком точек 2, пример точки, показан в таблице 3. Создаётся файл с параметрами точек сканирования (таблица 4). Затем, проводится объединение облаков точек, получается общее облако точек с количеством точек 12 919 304 (фиг. 4). После объединения, производится передискретезация с параметром поиска 0,5 см, что соответствует расстоянию между точками на плоскости в исходных облаках. Получившееся облако точек состоит из 7 233 115 точек. Затем производится разделение облака точек по параметру «точка сканирования». Получилось исходное облако точек 1 – обработанное с количеством точек 3 568 411 (фиг. 5) и исходное облако 2 – обработанное с количеством точек 3 664 704 (фиг. 6). Точки сохраняются в полярных координатах с центрами в точках сканирования.
Таблица 3. Пример параметров точки
Таблица 4. Параметры точек сканирования
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического локального повышения точности данных воздушного лазерного сканирования с использованием данных наземного лазерного сканирования | 2019 |
|
RU2736506C1 |
| Способ трехмерной реконструкции резьбы отверстий под шпильки главного разъёма корпуса реактора и автоматической идентификации дефектов | 2022 |
|
RU2791416C1 |
| Способ получения виртуальных моделей сложнопрофильных криволинейных поверхностей | 2023 |
|
RU2813465C1 |
| СПОСОБ КОНФОКАЛЬНОЙ СКАНИРУЮЩЕЙ ТРЕХМЕРНОЙ МИКРОСКОПИИ И КОНФОКАЛЬНЫЙ СКАНИРУЮЩИЙ ТОМОГРАФИЧЕСКИЙ МИКРОСКОП | 1999 |
|
RU2140661C1 |
| Способ контроля технического состояния несущих железобетонных и/или каменных строительных конструкций | 2023 |
|
RU2840684C1 |
| Система лазерного сканирования для определения параметров транспортного средства в потоке движения | 2023 |
|
RU2803398C1 |
| Способ построения трехмерной модели местности вдоль полотна железнодорожного пути | 2020 |
|
RU2726256C1 |
| ВИЗУАЛИЗАЦИЯ РЕКОНСТРУКЦИИ 3D-СЦЕНЫ С ИСПОЛЬЗОВАНИЕМ СЕМАНТИЧЕСКОЙ РЕГУЛЯРИЗАЦИИ НОРМАЛЕЙ TSDF ПРИ ОБУЧЕНИИ НЕЙРОННОЙ СЕТИ | 2023 |
|
RU2825722C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГОЛОГРАФИЧЕСКОГО ПРОЕКЦИОННОГО ЭКРАНА ДЛЯ ДЕМОНСТРАЦИИ ТРЕХМЕРНЫХ ЦВЕТНЫХ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2316033C1 |
| СПОСОБ КОНТРОЛЯ ЗА СОСТОЯНИЕМ ФУТЕРОВКИ ТЕПЛОВЫХ АГРЕГАТОВ | 2022 |
|
RU2795734C1 |
Изобретение относится к области обработки и отображения пространственной информации и может быть использовано при обработке облаков точек, состоящих из большого количества точек стояния, в частности при сканировании больших промышленных и гражданских зданий и сооружений. Технический результат состоит в уменьшении количества точек, создающих излишнюю плотность отображения. Для этого при использовании данного способа происходит передискретизация для уменьшения количества точек, создающих излишнюю плотность в области перекрытия, с последующим разделением на первоначальные облака точек с учётом передискретизации и сохранением данных в полярных координатах. 7 ил., 4 табл.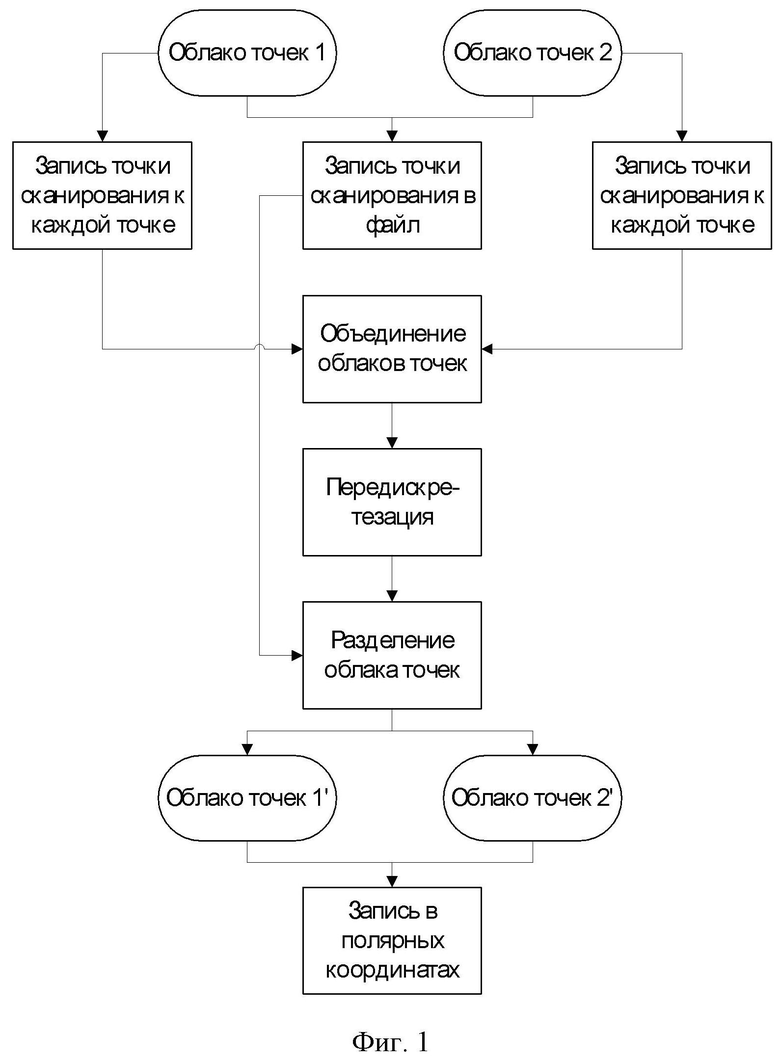
Способ передискретизации зарегистрированных облаков точек в полярных координатах без потери изначальной структуры, состоящий из следующих шагов: облака точек лазерного сканирования пространственного объекта, отсканированного с разных положений с перекрытием, регистрируются произвольным методом и сохраняются в прямоугольной системе координат, отличающийся тем, что после регистрации облаков точек меняют их структуру, путем добавления к каждой исходной точке облака нового параметра, существенно не влияющего на размер облака точек и объединяют их в один массив, для уменьшения количества точек в облаке точек, создающего излишнюю плотность в области перекрытия, осуществляют передискретизацию, при которой осуществляют отсев точек на основании предварительно заданного нового параметра с последующим разделением на первоначальные облака точек, после разделения точек облака сохраняют данные о точках в полярных координатах.
| Способ формирования архитектуры нейросети для классификации объекта, заданного в виде облака точек, способ ее применения для обучения нейросети и поиска семантически схожих облаков точек | 2017 |
|
RU2674326C2 |
| СПОСОБ ОБУЧЕНИЯ ИСКУССТВЕННОЙ НЕЙРОННОЙ СЕТИ | 2012 |
|
RU2504006C1 |
| US 9915733 B2, 13.03.2018 | |||
| CN 103983963 B, 17.08.2017. | |||

