ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Эта патентная заявка заявляет о приоритете по отношению к европейской патентной заявке № 17210646.0, поданной 27.12.2017, полное содержание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к конвертоплану и к сопутствующему способу управления.
УРОВЕНЬ ТЕХНИКИ
Как известно, конвертопланы представляют собой гибридные летательные аппараты с поворотными винтами.
Более подробно, конвертопланы способны избирательно принимать конфигурацию «самолет», в которой винты с соответствующими первыми осями, по существу, располагаются параллельно второй продольной оси конвертоплана, или конфигурацию «вертолет», где винты с соответствующими первыми осями, по существу, располагаются вертикально и поперечно вышеупомянутой второй продольной оси конвертоплана.
Благодаря возможности наклона винтов конвертопланы могут взлетать и приземляться как вертолет, то есть без необходимости во взлетно-посадочной полосе и даже на неровной поверхности, а также без создания уровня шума, несовместимого с городским поселением.
Кроме того, в конфигурации вертолета конвертопланы могут зависать на месте.
Конвертопланы также могут достигать и поддерживать крейсерские скорости около 500 км/ч и высоту полета около 7500 метров, если они находятся в конфигурации самолета.
Эта крейсерская скорость намного выше значения ок. 300 км/ч, определяющего максимальную крейсерскую скорость вертолетов.
Подобным образом, вышеупомянутая высота намного превышает типичную высоту для вертолетов и позволяет конвертопланам в режиме самолета избегать облаков и атмосферных помех, характерных для более низких высот.
Известные типы конвертопланов в основном включают в себя:
- фюзеляж;
- пару полукрыльев, расположенных консольно на соответствующих противоположных сторонах фюзеляжа; и
- пару гондол, в которых размещены соответствующие винты, которые могут наклоняться вместе с соответствующими винтами относительно соответствующего полукрыла вокруг третьей боковой оси, которая ортогональна второй продольной оси и первым осям винтов, когда конвертоплан находится в конфигурации вертолета.
Каждый винт содержит известным образом вал, вращающийся вокруг соответствующей первой оси, и множество лопастей, шарнирно прикрепленных к валу.
В частности, для каждого винта можно определить воображаемый диск винта, который соответствует окружности, описываемой свободными концами лопастей во время их вращения.
Конвертоплан также содержит для каждого винта систему управления общим шагом и циклическим шагом лопастей.
Каждая из вышеупомянутых систем управления предназначена для регулировки величины и направления тяги, создаваемой винтами.
Более конкретно, каждая система управления выполняет две основные функции:
- действие системы управления полетом, известной как «общий шаг», заключается в одновременном изменении угла наклона всех лопастей соответствующего винта, чтобы регулировать величину тяги, создаваемой этим винтом; и
- действие системы управления полетом, известной как «циклический шаг», заключается в индивидуальном и циклическом изменении угла наклона лопастей соответствующего винта во время их вращения вокруг оси вращения вала.
Система управления для каждого винта в основном содержит:
- невращающееся кольцо автомата перекоса, которое закреплено под углом по отношению к первой оси, и которое может свободно перемещаться параллельно первой оси и может колебаться относительно центра вращения вокруг второй оси и третьей оси; и
- вращающееся кольцо автомата перекоса, которое может вращаться вокруг первой оси как единое целое с валом, и может свободно перемещаться параллельно первой оси как единое целое с невращающимся кольцом автомата перекоса, и может колебаться относительно вышеупомянутого центра вращения вокруг второй оси и третьей оси как единое целое с невращающимся кольцом автомата перекоса.
Вращающееся кольцо автомата перекоса соединено с лопастями с помощью соответствующих соединительных тяг, расположенных в эксцентричном положении относительно продольного направления вылета лопастей.
В известном решении, используемом в вертолетах, конвертоплан также содержит для каждого винта:
- первый исполнительный механизм, управляемый системой управления «общим шагом» и функционально соединяющийся с невращающимся кольцом автомата перекоса таким образом, чтобы он перемещался вдоль первой оси и, следовательно, изменял общий шаг лопастей каждого винта; и
- пару вторых исполнительных механизмов, управляемых системой управления «циклическим шагом» и функционально соединяющихся с невращающимся кольцом автомата перекоса, для его наклона относительно центра вращения и вокруг второй и третьей осей, определяя между ними плоскость колебания, и, следовательно, изменяя циклический шаг лопастей каждого винта.
Благодаря управлению циклическим шагом лопастей и тому, что кольцо автомата перекоса может поворачиваться в плоскости, таким образом, можно наклонять диск винта в плоскости, определяемой второй осью и третьей осью, то есть в продольном и поперечном направлении относительно продольного направления движения вперед конвертоплана.
Наклон диска винта позволяет управлять направлением приложения тяги винта.
Например, в вертолетной конфигурации наклон диска винта относительно второй оси вертолета определяет составляющую тяги винта, параллельную первой оси и направленный вперед и назад соответственно.
Аналогичным образом, наклон диска винта относительно третьей оси определяет боковую составляющую тяги винта.
В отрасли осознают необходимость уменьшения габаритных размеров, необходимых для управления изменением шага лопастей каждого винта.
С этой целью было предложено заменить один из вышеупомянутых вторых исполнительных механизмов неподвижной тягой.
Как следствие, вращающиеся и невращающиеся кольца автомата перекоса каждого винта и соответствующий диск винта можно будет наклонять только относительно соответствующей оси и более нельзя будет наклонять в плоскости.
Другими словами, можно направить тягу, создаваемую винтами, только в одном направлении, а не в плоскости.
Снижение гибкости при управлении дисками винтов компенсируется тем фактом, что конвертоплан содержит пару винтов.
Например, маневр конвертоплана в сторону в продольном направлении происходит путем увеличения общего шага одного из винтов и уменьшения общего шага другого винта.
В отрасли осознают необходимость уменьшения габаритных размеров для системы управления шагом лопастей винтов, и в то же время оптимизации наклона дисков винтов как в конфигурации вертолета, так и в конфигурации самолета.
Более конкретно, в отрасли осознают необходимость увеличения статической поперечной устойчивости конвертоплана и ограничения общего угла взмаха лопастей винтов в конфигурации вертолета. Также известно о необходимости повышения статической поперечной устойчивости конвертоплана и ограничения риска помех между лопастями винтов в максимальном положении взмаха и соответствующими полукрыльями, применительно к конфигурации самолета.
В US 9,567,070 и US 2007/0221780 описан известный тип конвертоплана.
В EP-A-2105379 описан конвертоплан согласно преамбуле пункта 1 формулы изобретения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание конвертоплана, который позволит удовлетворить по меньшей мере одну из вышеупомянутых потребностей простым и недорогим способом.
Вышеупомянутая цель достигается посредством настоящего изобретения, поскольку оно относится к конвертоплану по п.1.
Настоящее изобретение также относится к способу управления конвертопланом по п.3.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения ниже приведен предпочтительный вариант осуществления исключительно в качестве неограничивающего примера и со ссылкой на прилагаемые чертежи:
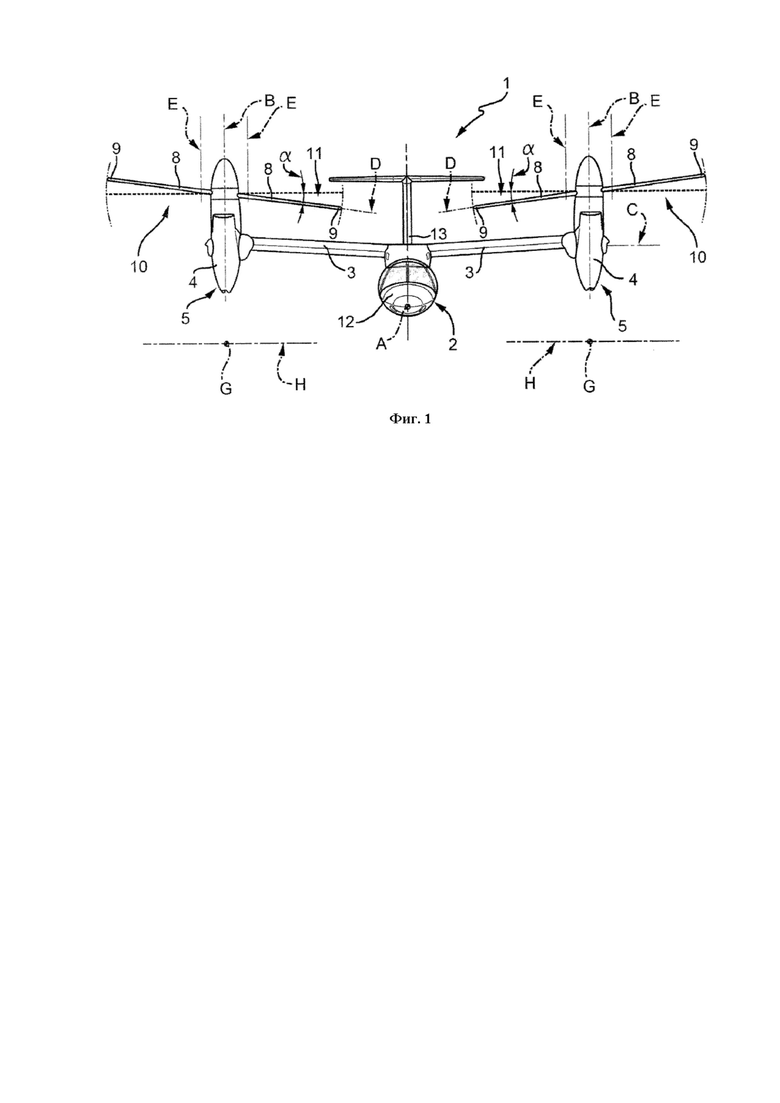
- фиг.1 представляет собой вид спереди конвертоплана, изготовленного в соответствии с принципами настоящего изобретения, в конфигурации вертолета;
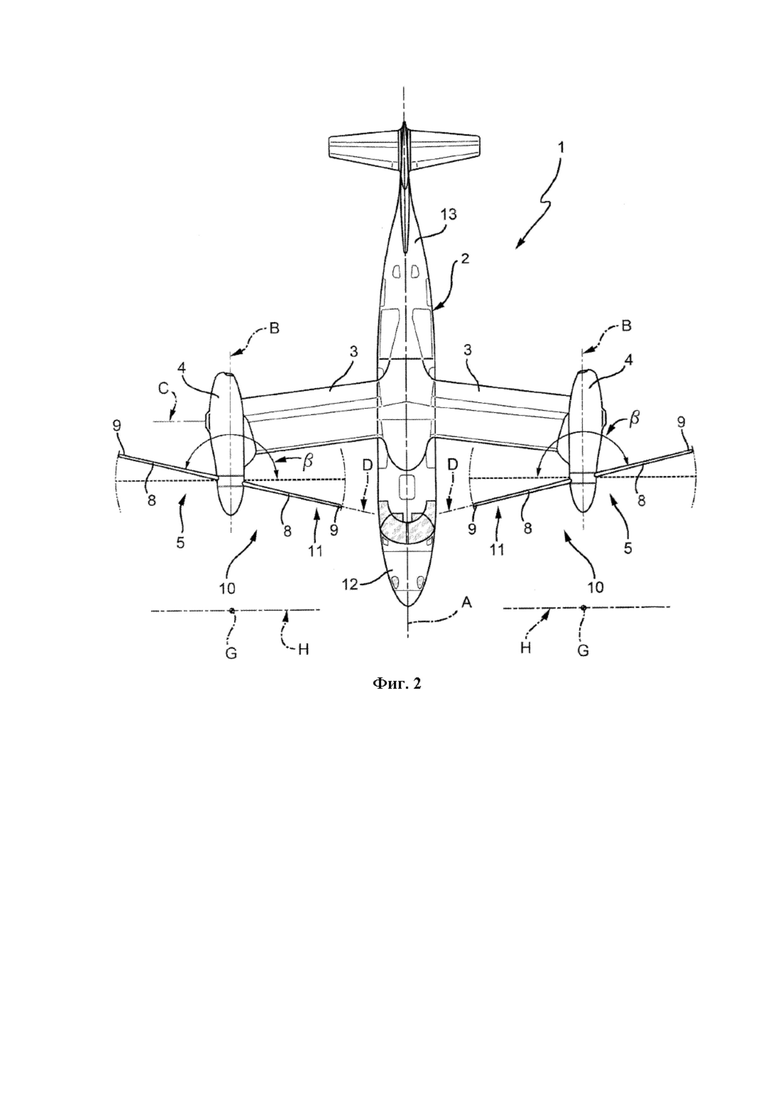
- фиг.2 представляет собой вид сверху конвертоплана по фиг.1 в конфигурации самолета;
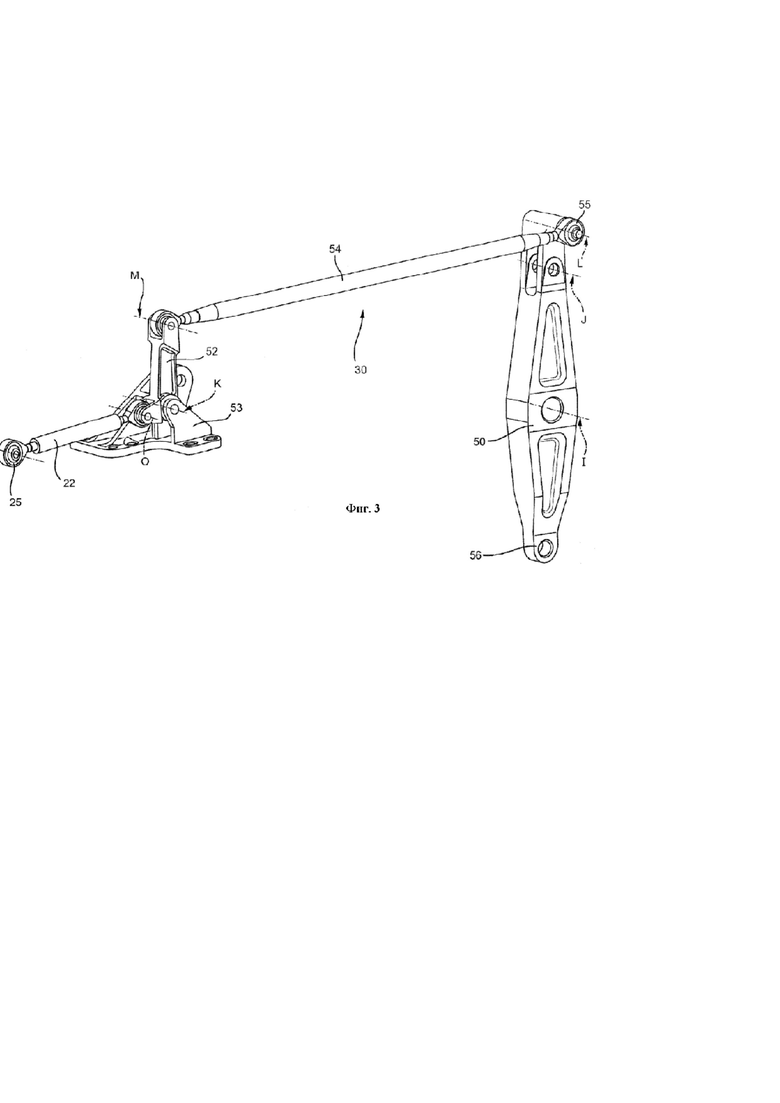
- на фиг.3 показан вид в перспективе в очень увеличенном масштабе первых компонентов системы управления шагом лопастей винта конвертоплана по фиг.1 и 2;
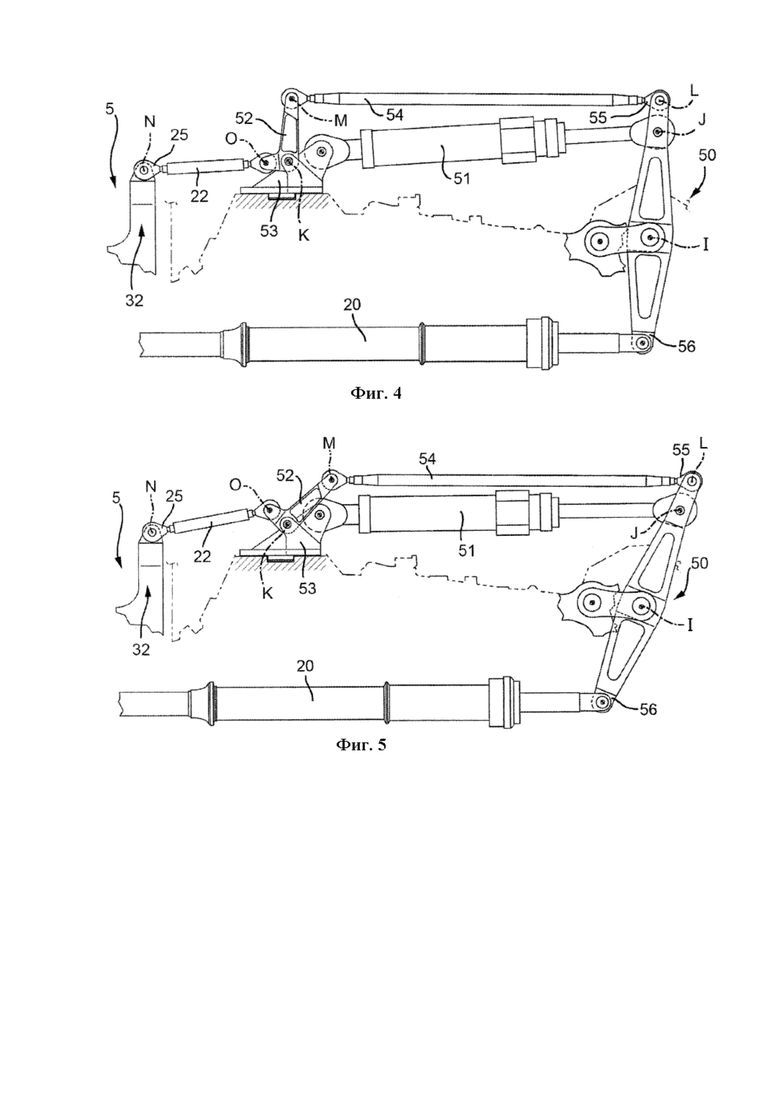
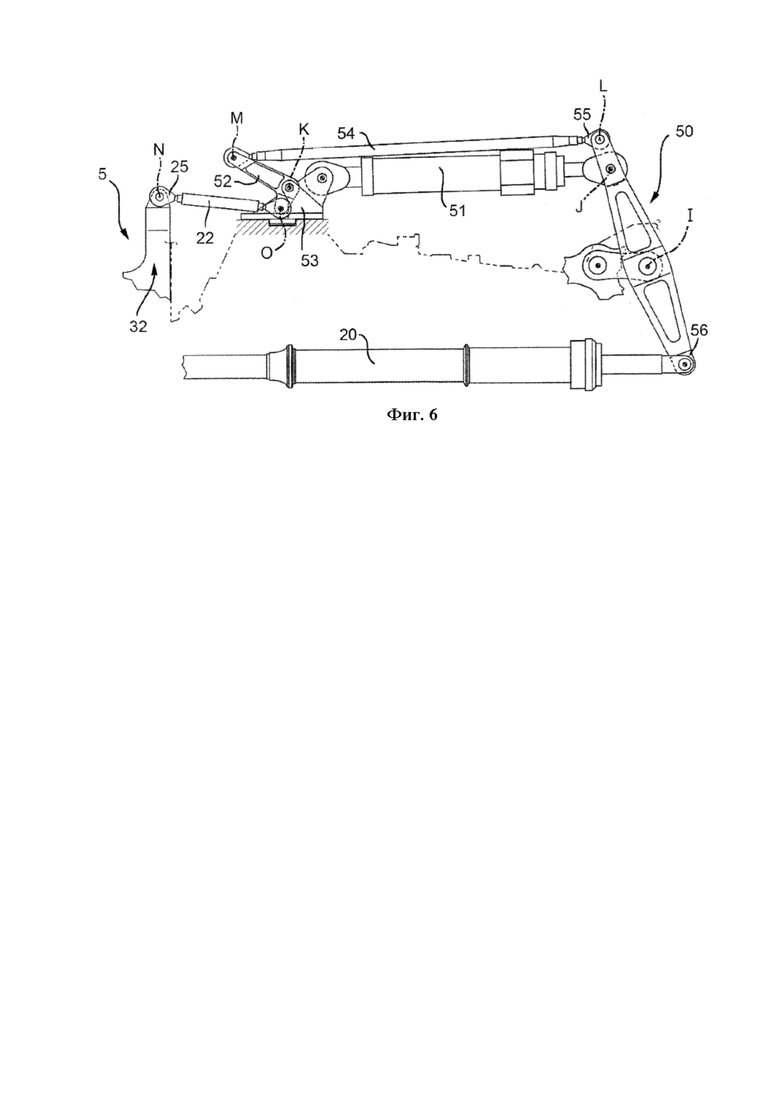
- на фиг.4-6 показаны первые компоненты и дополнительные компоненты системы управления по фиг.3 в соответствующих рабочих положениях, с убранными для ясности деталями; и
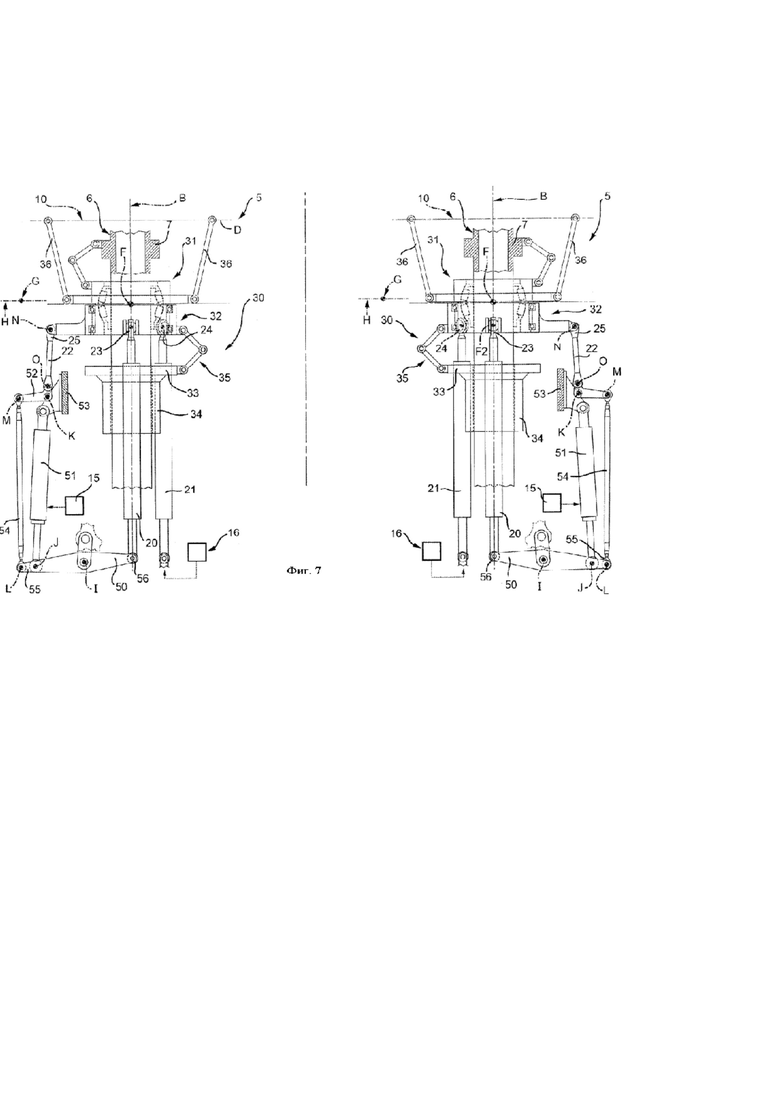
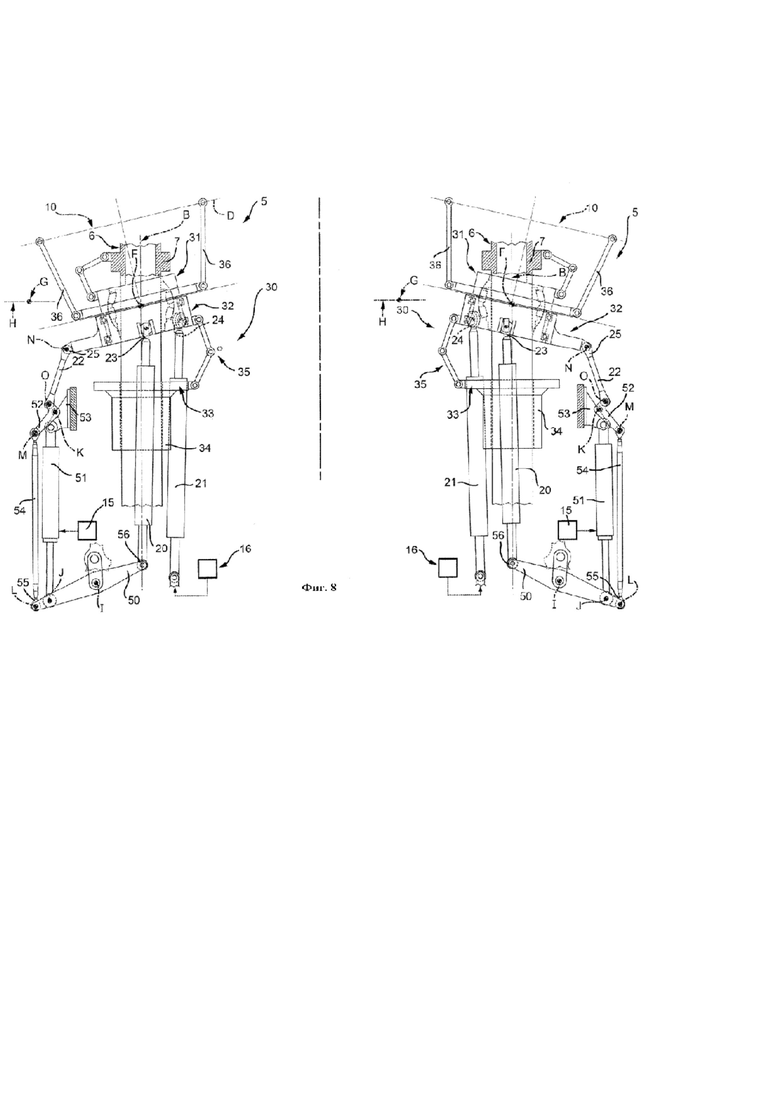
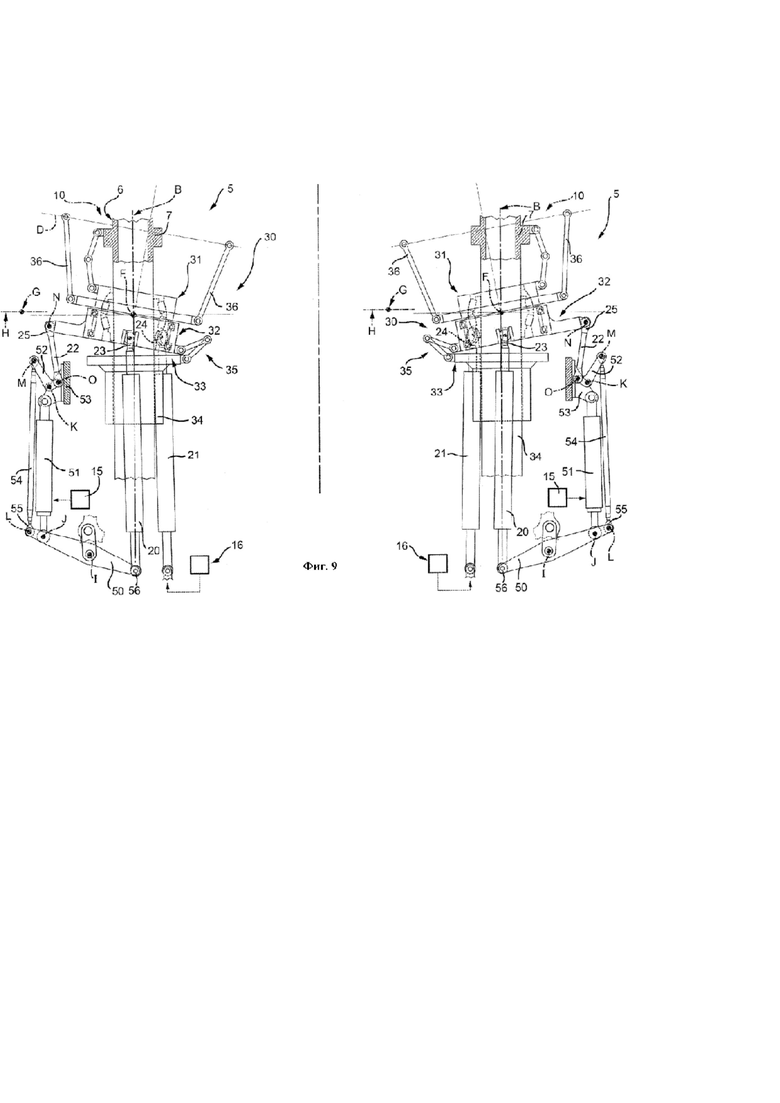
- на фиг. 7-9 показана система управления по фиг. 4-6 в соответствующих рабочих положениях.
ЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг.1 и 2 ссылочная позиция 1 обозначает конвертоплан.
Конвертоплан 1 в основном содержит:
- фюзеляж 2, имеющий продольно проходящую ось А;
- пару полукрыльев 3, консольно выступающих на соответствующих противоположных сторонах фюзеляжа 2 и поперек оси А; и
- пару гондол 4 с корпусами соответствующих винтов 5.
Фюзеляж 2 содержит нос 12, расположенный спереди, и хвостовую часть 13, противоположные друг другу вдоль оси А.
Следует отметить, что термины «передний», «хвостовой», «продольный», «боковой» и аналогичные термины, используемые в этом описании, относятся к нормальному направлению движения вперед конвертоплана 1 в поступательном полете, показанном на фиг.1 и 2.
Более подробно, каждый винт 5 в основном содержит:
- двигатель, который не показан;
- вал 6, вращающийся вокруг оси B;
- втулку 7, приводимую во вращение валом 6; и
- множество лопастей 8 (только две из которых показаны на фиг.1 и 2), шарнирно закрепленных на втулке 7.
Гондолы 4 могут наклоняться как одно целое с винтами 5 вокруг оси C относительно полукрыльев 3.
Ось C является поперечной к оси A и осям B.
Конвертоплан 1 может по выбору принимать:
- конфигурацию «вертолет» (показана на фиг.1), в которой оси B винтов 5 ортогональны оси A и оси C; и
- конфигурацию «самолет» (показана на фиг. 2), в которой оси B винтов 5 параллельны оси A и ортогональны оси C.
Поскольку винты 5 идентичны друг другу, далее будет описан один винт 5.
Лопасти 8 проходят вдоль соответствующих осей D и содержат соответствующие свободные законцовки 9.
Во время вращения свободные законцовки 9 лопастей 8 винта 5 описывают воображаемую окружность, указанную в этом описании как диск 10 винта.
С конкретной ссылкой на конфигурацию самолета, показанную на фиг.2, диск 10 винта содержит полудиск 11, расположенный сбоку от фюзеляжа 2 и обращенный к концевой части полукрыла 3 в направлении, параллельном оси А.
Каждая лопасть 8 установлена на соответствующей втулке 7 с тем, чтобы:
- изменять угол наклона, то есть угол, определенный относительно фиксированного направления, совпадающего с осью D; и
- изменять угол взмаха, то есть угол, определенный относительно оси E, ортогональной осям B и D.
Конвертоплан 1 также содержит:
- элемент 15 управления полетом (показан только схематически), известный как общий шаг, который используется для установки желаемого значения общего шага лопастей 8;
- элемент 16 управления полетом (показан только схематически), известный как циклический шаг, который используется для установки желаемого значения циклического шага лопастей 8; и
- систему 30 управления шагом лопастей 8, которая расположена между вышеупомянутыми элементами 15 и 16 управления полетом и лопастями 8 для изменения циклического и общего шага лопастей 8.
Более конкретно, изменение общего шага вызывает одновременное изменение угла наклона всех лопастей 8 для изменения величины тяги, создаваемой соответствующим винтом 5.
Изменение циклического шага вызывает циклическое изменение угла наклона каждой лопасти 8 во время ее вращения вокруг оси B между максимальным значением и минимальным значением.
Таким образом, элемент 16 управления полетом вызывает изменение наклона диска 10 винта и создание составляющей тяги, ортогональной оси B винта 5.
Как показано на фиг.7-9, система 30 управления каждого винта 5 в основном содержит:
- вращающееся кольцо 31 автомата перекоса, соединенное с втулкой 7 посредством изогнутой тяги 35, чтобы вращаться вокруг оси B как единое целое с валом 6 и лопастями 8, скользить вдоль оси B и иметь возможность колебаться относительно центра F вращения, лежащего на оси B; и
- невращающееся кольцо 32 автомата перекоса, закрепленное без возможности вращения вокруг оси B, скользящее вдоль оси B и свободно колеблющееся относительно вышеупомянутого центра F вращения.
Кольца 31 и 32 автомата перекоса могут скользить вдоль оси В как одно целое друг с другом, и могут наклоняться относительно центра F вращения как одно целое друг с другом.
В частности, статор 34, поддерживающий вал 6, проходит через кольцо 32 автомата перекоса, а вал 6 проходит через кольцо 31 автомата перекоса.
Система 30 управления также содержит диск 33, неподвижно соединенный со статором 34 вала 6 посредством изогнутой тяги 35 и соединенный с кольцом 32 автомата перекоса с тем, чтобы предотвратить вращение кольца 32 автомата перекоса вокруг оси B вследствие вращения кольца 31 автомата перекоса.
Центр F вращения допускает колебание колец 31 и 32 автомата перекоса каждого винта вокруг двух взаимно ортогональных осей G и H.
В результате диск 10 винта каждого винта 5 может свободно наклоняться относительно осей G и H, взаимно ортогональных и ортогональных оси В.
В примере, показанном в конфигурации вертолета на фиг.1, оси G параллельны оси A и ортогональны оси C, а оси H параллельны оси C.
В конфигурации самолета на фиг.2 оси G ортогональны оси A и оси C, а оси H параллельны оси C.
Каждый винт 5 также содержит:
- исполнительный механизм 21, управляемый соответствующим элементом 16 управления полетом посредством рычажного механизма (не показан) и функционально соединяющийся с соответствующей системой 30 управления с тем, чтобы изменять циклический шаг лопастей 8 и, таким образом, наклонять диск винта относительно оси G; и
- тягу 20, управляемую соответствующим элементом 15 управления полетом и функционально соединяющуюся с системой 30 управления для изменения общего шага лопастей 8 винта 5.
Тяга 20 и исполнительный механизм 21 имеют соответствующие свободные концы 23 и 24, закрепленные на кольце 32 автомата перекоса.
Конец 23 крепится к кольцу 32 автомата перекоса соосно оси В. Таким образом, перемещение тяги 20 параллельно оси В вызывает перемещение кольца 32 автомата перекоса и, следовательно, кольца 31 автомата перекоса параллельно оси В.
Конец 24 крепится к кольцу 32 автомата перекоса в эксцентричном положении относительно оси B. Таким образом, перемещение тяги 20 параллельно оси B вызывает наклон колец 31 и 32 автомата перекоса относительно оси G.
Винт 5 также содержит множество соединительных тяг 36, расположенных между кольцом 32 автомата перекоса и соответствующими лопастями 8 в эксцентричном положении относительно соответствующих осей D.
Таким образом, перемещение колец 31 и 32 автомата перекоса параллельно оси B вызывает изменение общего шага лопастей 8, в то время как наклон колец 31 и 32 автомата перекоса вызывает изменение циклического шага лопастей 8 и, следовательно, наклон диска 10 винта относительно оси G.
Предпочтительно, винт 5 содержит тягу 22, функционально соединяемую с кольцом 32 автомата перекоса и подвижную с тем, чтобы вызывать наклон диска 10 винта вокруг оси H на угол α или β, связанный с конфигурацией конвертоплана 1.
Таким образом, посредством исполнительного механизма 21 и тяги 22 диск 10 винта может быть наклонен на выборочно изменяемый угол в направлении движения вперед, параллельно оси А конвертоплана 1, и наклонен на заданный угол в боковом направлении, параллельном оси C конвертоплана 1, когда конвертоплан 1 находится в конфигурации вертолета.
Диск 10 винта также может быть наклонен на выборочно изменяемый угол в поперечном направлении конвертоплана 1 и на заданный угол в направлении движения вперед конвертоплана 1, когда конвертоплан 1 находится в конфигурации самолета.
Более подробно, тяга 22 может перемещаться между первым положением (фиг.5 и 8) и вторым положением (фиг.4 и 7), когда конвертоплан 1 находится в конфигурации вертолета.
Тяга 22 может перемещаться между вторым положением и третьим положением (фиг.6 и 9), когда конвертоплан 1 находится в состоянии перехода из конфигурации вертолета в конфигурацию самолета, и когда конвертоплан 1 находится в конфигурации самолета.
Вследствие этого наклон диска 10 винта относительно оси H (фиг.1) регулируется, когда конвертоплан 1 находится в конфигурации вертолета.
Аналогично, наклон диска 10 винта относительно оси H регулируется, когда конвертоплан 1 находится в состоянии перехода из конфигурации вертолета в конфигурацию самолета, и когда конвертоплан 1 находится в конфигурации самолета (фиг. 2).
Более конкретно, со ссылкой на конфигурацию вертолета на фиг.1, первое и второе положения, занимаемые тягами 22, таковы, что диски 10 винтов сходятся к фюзеляжу 2.
Что касается конфигурации самолета на фиг.2, третье и четвертое положения, занимаемые тагями 22, таковы, что диски 10 винтов сходятся к носу 12 фюзеляжа 2.
В частности, лопасти 8, образующие полудиски 11, в определенный момент времени выдвигаются с растущим расстоянием из соответствующих полукрыльев 3 при прохождении от соответствующих осей B к соответствующим законцовкам 9, когда конвертоплан 1 находится в конфигурации самолета (фиг. 2).
Альтернативно, третьи положения, занимаемые тягями 22, таковы, что диски 10 винтов ортогональны оси A и соответствующим осям B, когда конвертоплан 1 находится в конфигурации самолета.
Как описано далее в данном описании, движение тяги 22 управляется элементом 15 управления полетом.
Более подробно, элемент 15 управления полетом перемещает тягу 20 между:
- соответствующим первым положением (фиг.5 и 8), при котором общий шаг лопастей 8 принимает первое минимальное значение;
- соответствующим вторым положением (фиг.4 и 7), при котором общий шаг лопастей 8 принимает второе значение; и
- соответствующим третьим положением (фиг.6 и 9), при котором общий шаг лопастей 8 принимает третье максимальное значение.
Перемещение тяги 20 между соответствующими первым и вторым положениями соответствует диапазону значений общего шага, характерному для конфигурации вертолета.
Перемещение тяги 20 между соответствующими вторым и третьим положениями соответствует диапазону значений общего шага, характерному для конфигурации самолета конвертоплана 1.
В частности, перемещение тяги 20 в направлении соответствующих положений, связанных с увеличением значения общего шага, вызывает увеличение угла α и β диска 10 винта относительно оси H в конфигурации вертолета и в конфигурации самолета конвертоплана 1.
В частности, углы α и β диска 10 винта относительно оси H отличаются друг от друга.
Диск 10 винта также подвергается развороту относительно оси H во время преобразования между конфигурациями вертолета и самолета.
В частности, полудиск 11, ближайший к полукрылу 3 вдоль оси B в конфигурации вертолета, становится полудиском 11, наиболее удаленным от полукрыла 3 вдоль оси A в конфигурации самолета, и наоборот.
Как показано на фиг.3-9, тяга 22 имеет свободный конец 25, прикрепленный к кольцу 32 автомата перекоса.
В частности, аналогично концу 24 конец 25 крепится к кольцу 32 автомата перекоса в эксцентричном положении относительно оси B. Таким образом, движение тяги 22 параллельно оси B вызывает наклон колец 31 и 32 автомата перекоса вокруг центра F вращения.
Как конкретно показано на фиг.4-9, винт 5 также содержит:
- балансир 50, шарнирно закрепленный вокруг оси I;
- ведомый элемент 51, управляемый элементом 15 управления полетом и шарнирно соединенный с балансиром 50 в эксцентричном положении относительно оси J;
- рычаг 52, шарнирно соединенный с кронштейном 53 вокруг оси K; и
- соединительную тягу 54, шарнирно соединенную на своих противоположных концах между концом 55 балансира 50 и рычагом 52 относительно соответствующих осей L и М.
Тяга 22 шарнирно соединена с кольцом 32 автомата перекоса на своем конце 25 и вокруг оси N, и с рычагом 52 вокруг оси O, отличной от осей J и L.
В показанном случае ведомый элемент 51 расположен между осью I и соединительной тягой 54.
Тяга 20 шарнирно соединена на своих противоположных концах с кольцом 32 автомата перекоса на конце 23 и с концом 56 балансира 50, противоположно концу 55 относительно оси I.
В показанном примере оси I, J, K, L, M, N и O параллельны друг другу и оси G и ортогональны оси B.
В показанном случае рычаг 52 имеет Г-образную форму.
Принцип действия конвертоплана 1 подробно описан ниже, начиная с конвертоплана 1 в конфигурации самолета, показанной на фиг.1.
В этом состоянии оси B винтов 5 ортогональны оси A и оси C.
Элементы 15 управления полетом устанавливают значения общего шага для лопастей 8 винтов 5 в диапазоне между соответствующими первыми минимальными значениями и соответствующими вторыми значениями в соответствии с оперативными потребностями конвертоплана 1.
Элементы 15 управления полетом также устанавливают посредством системы 30 управления наклон дисков 10 винтов относительно соответствующих осей H на основе значения общего шага, установленного для лопастей 8 винтов 5.
Более конкретно, диски 10 винтов наклонены относительно соответствующих осей H и сходятся к фюзеляжу 2, когда значения общего шага для лопастей 8 винтов 5 находятся в диапазоне между соответствующими первыми минимальными значениями и соответствующими вторыми значениями. В случае, когда необходимо переместить вертолет 1 параллельно осям G, то есть в поперечном направлении к оси А, достаточно увеличить общий шаг одного из винтов 5 и/или уменьшить общий шаг другого винта 5.
Элементы 16 управления полетом посредством системы 30 управления устанавливают наклон дисков 10 винтов относительно осей G параллельно оси А, то есть они наклоняют диски 10 винтов в направлении носа 12 или в направлении хвостовой части 13 фюзеляжа 2 в соответствии с оперативными потребностями конвертоплана 1. Например, в случае, когда необходимо переместить конвертоплан 1 вперед вдоль оси A, диски 10 винтов наклонены к носу 12. В случае, когда необходимо заставить конвертоплан 1 двигаться назад, диски винтов наклоняются к хвостовой части 13.
В частности (фиг. 4-9), после действия элементов 15 управления полетом ведомые элементы 51 вызывают вращение балансиров 50 вокруг соответствующих осей I.
Это вращение балансиров 50 вызывает для каждого винта 5 перемещение соответствующих тяг 20, соединенных с соответствующим кольцом 32 автомата перекоса, и перемещение соответствующей соединительной тяги 54, шарнирно соединенной с соответствующими осями L и М.
Перемещение тяг 20 вызывает перемещение колец 32 автомата перекоса и, следовательно, соответствующих колец 31 автомата перекоса и соединительных тяг 36, параллельных осям B. Таким образом, лопасти 8 одновременно изменяют свои углы наклона на ту же величину.
В то же время движение соответствующих соединительных тяг 54 вызывает вращение соответствующих рычагов 52 вокруг соответствующих осей K и последующие перемещения соответствующих тяг 22 с соответствующими компонентами параллельно соответствующим осям B. Эти движения тяг 22 вызывают наклон колец 31 и 32 автомата перекоса вокруг центра F вращения и вокруг оси G.
В то же время действия элементов 16 управления полетом вызывают движение исполнительных механизмов 21 и, как следствие, наклон колец 31 и 32 автомата перекоса вокруг центра F вращения.
Поскольку кольца 32 автомата перекоса поворачиваются, соответствующие тяги 36 циклически поднимаются и опускаются при их повороте, вызывая циклическое изменение углов наклона лопастей 8 при вращении лопастей 8 вокруг соответствующих осей B.
Таким образом, посредством тяг 22 и исполнительных механизмов 21 диски 10 винтов наклоняются вокруг соответствующих осей H в поперечном направлении к оси A, сходятся к оси A на угол, определяемый общим шагом, установленным элементом 15 управления полетом, и они наклоняются относительно соответствующих осей G параллельно оси A под углом, определяемым элементами 16 управления полетом.
В случае, когда необходимо управлять конвертопланом 1 в конфигурации самолета, винты 5 поворачиваются на 90 градусов вокруг оси C в направлении носа 12 фюзеляжа 2. В конце этого поворота оси B параллельны оси A и ортогональны оси C (фиг.2).
При переходе к конфигурации самолета (фиг. 5 и 7) и когда конвертоплан 1 находится в конфигурации самолета (фиг. 6 и 9), элементы 15 управления полетом устанавливают посредством тяги 20 и колец 31 и 32 автомата перекоса значения общего шага для лопастей 8 винтов 5, находящиеся в диапазоне между соответствующими вторыми значениями и соответствующими третьими значениями, в соответствии с движущей силой, запрошенной конвертопланом 1.
В конфигурации самолета лопасти 8 полудисков 11, которые в данный момент времени простираются от оси B к фюзеляжу 2, обращены к соответствующим полукрыльям 3 вдоль оси A.
При вышеупомянутом переходе диск 10 винта также подвергается развороту относительно оси H во время преобразования между конфигурациями вертолета и самолета.
Таким образом, полудиск 11, ближайший к полукрылу 3 вдоль оси B в конфигурации вертолета, становится полудиском 11, наиболее удаленным от полукрыла 3 вдоль оси A в конфигурации вертолета.
Элементы 15 управления полетом приводят посредством балансиров 50, соединительных тяг 54, соединительных тяг 52, тяг 22 и систем 30, диски 10 винтов в положение схождения к носу 12 фюзеляжа 2, на основе общего шага, заданного для лопастей 8 винтов 5.
В случае, когда необходимо увеличить движущую силу винтов 5, например, для увеличения крейсерской скорости конвертоплана 1, достаточно повысить общий шаг лопастей 8 с помощью элементов 15 управления полетом и соответствующих тяг 20. Это увеличение общего шага, до максимального третьего значения, также вызывает увеличение угла β наклона дисков 10 винтов относительно соответствующих осей H.
Элементы 16 управления полетом посредством соответствующих исполнительных механизмов 21 и систем 30 вызывают наклон дисков 10 винтов относительно соответствующих осей G, расположенных параллельно оси А, когда конвертоплан 1 находится в конфигурации самолета.
В качестве альтернативы элементы 15 управления полетом приводят диски 10 винтов в положение, ортогональное оси A в конфигурации самолета, полностью аналогично уже описанному выше способу.
По результатам изучения характеристик конвертоплана 1 и способа в соответствии с настоящим изобретением очевидны достижимые преимущества.
Более подробно, тяги 22 винтов 5 позволяют изменять угол наклона дисков 10 винтов относительно соответствующих осей H в соответствии с конфигурацией самолета или вертолета, принятой конвертопланом 1.
Таким образом, можно уменьшить габаритные размеры и сложность конструкции систем 30, оптимизируя в то же время наклон дисков 10 винтов как в конфигурации вертолета, так и в конфигурации самолета.
Фактически, с одной стороны, конвертоплану 1 для каждого винта 5 требуется только один исполнительный механизм, представленный элементом 51 управления, и только один исполнительный механизм 21 вместо трех отдельных исполнительных механизмов, как в решениях, традиционно используемых в области вертолетов и описанных во вступительной части этого описания.
С другой стороны, тяги 22 вызывают колебание колец 31 и 32 автомата перекоса относительно соответствующих осей H с тем, чтобы:
- привести диски 10 винтов в положение схождения к фюзеляжу 2 в конфигурации вертолета (фиг.1); и
- привести диски 10 винтов в положение схождения к носу 12 фюзеляжа 2 в конфигурации самолета (фиг.2).
Благодаря этому, как отмечает автор заявки, могут быть достигнуты следующие преимущества.
Что касается конфигурации вертолета, расположение дисков 10 винтов, сходящихся к фюзеляжу 2, позволяет:
- ограничить взмах лопастей 8 в поперечной плоскости при полете в переднем направлении, чтобы повысить максимальную скорость движения вперед конвертоплана 1 в конфигурации 1 вертолета, в пределах которой возможно удерживать общий взмах лопастей 8 винтов 5 в поперечной плоскости; и
- повысить поперечную устойчивость конвертоплана 1 в случае бокового скольжения или крена конвертоплана 1 при угловом крене относительно оси A; фактически в этих обстоятельствах винты 5 создают стабилизирующий вращающий момент, полностью аналогичный моменту, получаемому в обычном самолете за счет использования полукрыльев с положительным углом поперечного V крыла.
Что касается конфигурации самолета, расположение дисков 10 винтов, сходящихся к носу 12 фюзеляжа 2, позволяет:
- увеличить расстояние вдоль оси A между лопастями 8 винтов 5 и полукрыльями 3, увеличивая предел безопасности в случае бокового ветра, который вызывает биение лопастей 8 относительно соответствующих осей H, которое стремится перемещать лопасти 8 ближе к соответствующим полукрыльям 3; и
- создать стабилизирующий момент рыскания по отношению к барицентру конвертоплана 1 при наличии бокового ветра для выравнивания оси А конвертоплана 1 по направлению ветра.
Таким образом, конвертоплан 1 позволяет объединить преимущества упрощения решения с использованием только элемента 51 управления и исполнительного механизма 21 с возможностью оптимизации наклона дисков 10 винтов относительно осей H, в соответствии с конфигурацией вертолета или самолета конвертоплана 1.
Кроме того, движение тяг 22 определяется элементами 15 управления полетом, предназначенными для управления общим шагом лопастей 8 винтов 5.
Таким образом, можно использовать тот факт, что общий шаг лопастей 8 изменяется в первом диапазоне значений в конфигурации вертолета и во втором диапазоне значений в конфигурации самолета конвертоплана 1.
Наконец, углы наклона дисков 10 винтов относительно соответствующих осей H постепенно увеличиваются с увеличением общего шага лопастей 8, особенно в отношении перехода из конфигурации вертолета в конфигурацию самолета конвертоплана 1 и в отношении конфигурации самолета конвертоплана 1.
Таким образом, увеличение крейсерской скорости конвертоплана 1 в конфигурации самолета, достигаемое за счет увеличения общего шага лопастей 8 винтов 5, автоматически вызывает увеличение вышеуказанных пределов безопасности стабилизации.
Наконец, ясно, что возможны модификации и варианты в отношении конвертоплана 1 и соответствующего способа управления, описанных и проиллюстрированных в данном описании, без выхода за рамки, определенные формулой изобретения.
В частности, тяги 22 могут функционально соединяться с исполнительными механизмами, которые вызывают поворот гондол 4 во время перехода между конфигурацией вертолета и конфигурацией самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕРТОПЛАН | 2012 |
|
RU2589212C2 |
| Конвертоплан | 2018 |
|
RU2705743C1 |
| КОНВЕРТОПЛАН | 2016 |
|
RU2717119C1 |
| КРЫЛО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2786894C1 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| КОНВЕРТОПЛАН | 2004 |
|
RU2282566C2 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| ВЕРТОЛЕТ-КОНВЕРТОПЛАН | 2004 |
|
RU2277497C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И/ИЛИ ПОСАДКИ И СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ТЕКУЧЕЙ СРЕДЫ ПО ЛИНИИ ТЕКУЧЕЙ СРЕДЫ ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И/ИЛИ ПОСАДКИ | 2019 |
|
RU2785242C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Конвертоплан (1) содержит фюзеляж (2) с первой осью (А), пару полукрыльев (3) и пару винтов (5), расположенных на противоположных концах полукрыльев (3). Винт (5) содержит вал (6), шарнирно закрепленный на второй оси (B), и множество лопастей (8), шарнирно закрепленных на валу (6). Вал (6) винта (5) может наклоняться со второй осью (B) относительно третьей оси (C), поперечной ко второй оси (B), и относительно фюзеляжа (2) для преобразования конвертоплана (1) между режимом вертолета и режимом самолета. Диск (10) винта может наклоняться относительно четвертой оси (G). Винт (5) содержит средства (30) управления циклическим шагом и общим шагом лопастей (8), содержащие первый исполнительный механизм (21), управляемый для изменения общего шага, второй исполнительный механизм (51, 20), управляемый для изменения наклона диска (10) винта относительно четвертой оси (G) и тягу (22), подвижную для изменения наклона соответствующего диска (10) винта относительно пятой оси (H) в соответствии с режимом конвертоплана (1). Обеспечивается увеличение статической поперечной устойчивости, ограничение угла маха лопастей винтов. 2 н. и 5 з.п. ф-лы, 9 ил.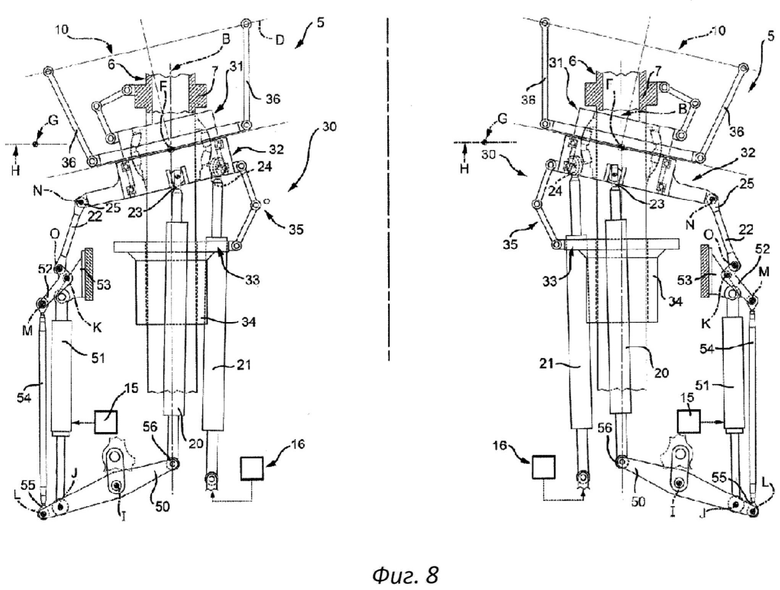
1. Конвертоплан (1), содержащий
- фюзеляж (2), имеющий первую продольную ось (А);
- пару полукрыльев (3); и
- пару винтов (5), расположенных на соответствующих противоположных концах указанных полукрыльев (3);
при этом каждый указанный винт (5) содержит вал (6), вращающийся вокруг второй оси (B), и группу лопастей (8), шарнирно прикрепленных к указанному валу (6) относительно указанной второй оси (B);
при этом указанный вал (6) каждого указанного винта (5) выполнен с возможностью наклоняться как единое целое с указанной второй осью (B) относительно третьей оси (C), поперечной к указанной второй оси (B), и относительно указанного фюзеляжа (2) для преобразования указанного конвертоплана (1) между конфигурацией вертолета и конфигурацией самолета указанного конвертоплана (1);
при этом каждая из указанных вторых осей (B), при использовании, является поперечной к указанной первой оси (A) указанного конвертоплана (1) в указанной конфигурации вертолета и, при использовании, по существу, параллельна указанной первой оси (A) в указанной конфигурации самолета;
при этом каждый указанный винт (5) связан с соответствующим воображаемым диском (10) винта, который определяется воображаемой окружностью, описываемой, при использовании, вращением свободными законцовками (9) указанных лопастей (8) противоположно соответствующей указанной второй оси (B);
при этом указанный диск (10) винта наклоняется относительно четвертой оси (G), поперечной к указанной второй оси (B);
при этом каждый указанный винт (5) дополнительно содержит средства (30) управления циклическим шагом и общим шагом соответствующих указанных лопастей (8);
при этом указанные средства (30) управления содержат, в свою очередь, для каждого указанного винта (5)
- первый исполнительный механизм (51, 20), управляемый для изменения указанного общего шага соответствующих указанных лопастей (8); и
- второй исполнительный механизм (21), управляемый для изменения наклона соответствующего указанного диска (10) винта относительно указанной четвертой оси (G);
отличающийся тем, что указанные средства (30) управления содержат для каждого указанного винта (5) тягу (22), способную двигаться для изменения угла (α, β) наклона соответствующего указанного диска (10) винта относительно пятой оси (H) поперечно указанной соответствующей четвертой оси (G) и указанной второй оси (B);
при этом указанная тяга (22) выполнена с возможностью двигаться в соответствии с конфигурацией вертолета или самолета указанного конвертоплана (1) для управления указанным углом (α, β) наклона в соответствии с указанной конфигурацией вертолета или самолета указанного конвертоплана (1);
при этом указанный конвертоплан (1) содержит для каждого указанного винта (5) элемент (15) управления, функционально соединяемый с соответствующим указанным первым исполнительным механизмом (51, 20) и с соответствующей указанной тягой (22), и по выбору действует для изменения указанного общего шага соответствующих указанных лопастей (8);
при этом каждый указанный элемент (15) управления является подвижным
- между первым и вторым положением, с которым связаны соответствующие первое и второе значения указанного общего шага указанных лопастей (8), характерные для указанной конфигурации вертолета; и
- между указанным вторым и третьим положением, с которым связаны соответствующие второе и третье значения указанного общего шага указанных лопастей (8), характерные для перехода от указанной конфигурации вертолета к указанной конфигурации самолета и для указанной конфигурации самолета;
при этом указанная тяга (22) и средства (30) управления каждого винта (5) сконфигурированы таким образом, что перемещение указанного элемента (15) управления между соответствующими указанными вторым и третьим положениями вызывает реверсирование указанного наклона соответствующего диска (10) винта относительно указанной пятой оси (H) и вокруг нее.
2. Конвертоплан по п. 1, отличающийся тем, что он выполнен с возможностью изменения угла (α, β) наклона соответствующего указанного диска (10) винта относительно указанной пятой оси (H) в соответствии со значением общего шага указанных лопастей (8) соответствующего винта (5).
3. Способ управления конвертопланом (1), при этом указанный конвертоплан (1) содержит
- фюзеляж (2), имеющий первую продольную ось (А);
- пару полукрыльев (3); и
- пару винтов (5), расположенных на соответствующих противоположных концах указанных полукрыльев (3);
при этом каждый указанный винт (5) содержит вал (6), вращающийся вокруг второй оси (B), и группу лопастей (8), шарнирно прикрепленных к указанному валу (6) относительно указанной второй оси (B);
при этом указанный способ включает в себя следующие этапы
i) приведение во вращение указанного вала (6) каждого указанного винта (5) вокруг соответствующей второй оси (B);
ii) наклон каждого указанного винта (5) как единого целого с соответствующей указанной второй осью (B) вокруг третьей оси (C), поперечной относительно указанной второй оси (B) и относительно указанного фюзеляжа (2), между конфигурацией вертолета и конфигурацией самолета указанного конвертоплана (1);
iii) размещение указанной второй оси (B) в поперечном направлении относительно указанной первой оси (A) в указанной конфигурации вертолета указанного конвертоплана;
iv) размещение указанной второй оси (B) параллельно указанной первой оси (A) в указанной конфигурации самолета указанного конвертоплана(1);
v) наклон дисков (10) винтов каждого указанного винта (5) вокруг соответствующих четвертых осей (G), поперечных к указанным вторым осям (В); при этом каждый указанный диск (10) винта определяется для соответствующего указанного винта (5) воображаемой окружностью, описываемой свободными законцовками (9) соответствующих указанных лопастей (8) противоположно соответствующей указанной второй оси (В) во время их вращения вокруг указанной второй оси (В);
vi) управление циклическим и общим шагом указанных лопастей (8) каждого указанного винта (5);
при этом указанный этап vi) содержит для каждого указанного винта (5) следующие этапы
vii) изменение общего шага указанных лопастей (8) посредством первого исполнительного механизма (51, 20); и
viii) изменение наклона соответствующего указанного диска (10) винта относительно указанной четвертой оси (G) посредством второго исполнительного механизма (21);
отличающийся тем, что указанный этап vi) содержит этап ix) перемещения тяги (22) для изменения угла (α, β) наклона соответствующего указанного диска (10) винта относительно пятой оси (H), поперечной к указанной соответствующей четвертой оси (G) и соответствующей указанной второй оси (B) в соответствии с указанной конфигурацией самолета или вертолета указанного конвертоплана (1) для управления указанным углом (α, β) наклона указанного диска (10) винта в соответствии с указанной конфигурацией самолета или вертолета указанного конвертоплана (1);
при этом указанный способ включает этап x) приведения указанных дисков (10) винтов в первую конфигурацию, в которой они сходятся к указанному фюзеляжу (2), когда указанный конвертоплан (1) находится в указанной конфигурации вертолета;
при этом указанный способ дополнительно содержит, когда указанный конвертоплан (1) находится в указанной конфигурации самолета, следующие этапы
xi) приведение указанных дисков (10) винтов во вторую конфигурацию, в которой они сходятся к носу (12) указанного фюзеляжа (2); или
xii) приведение указанных дисков (10) винтов во вторую конфигурацию, в которой они ортогональны указанной первой оси (А).
4. Способ по п. 3, отличающийся тем, что он содержит этап xiii) изменения угла (α, β) наклона соответствующего указанного диска (10) винта относительно указанной пятой оси (H) в соответствии со значением общего шага указанных лопастей (8) соответствующего винта (5).
5. Способ по пп. 3-4, отличающийся тем, что он содержит этап xiv) увеличения указанного угла (α, β) наклона указанного диска (10) винта после увеличения указанного значения указанного общего шага указанных лопастей (8) соответствующего указанного винта (5).
6. Способ по пп. 3-5, отличающийся тем, что он содержит этап xv) изменения угла (α, β) наклона соответствующего указанного диска (10) винта относительно указанной пятой оси (H) в соответствии со значением угла наклона соответствующего указанного винта (5) относительно указанной третьей оси (С).
7. Способ по пп. 3-6, отличающийся тем, что он содержит этап xvi) изменения наклона соответствующего указанного диска (10) винта относительно указанной пятой оси (H), когда указанный конвертоплан (1) трансформируется между конфигурациями вертолета и самолета.
| Устройство для измерения внутреннего диаметра металлической трубы | 1984 |
|
SU1232943A1 |
| СПОСОБ ПОЛУЧЕНИЯ СПЛОШНОЙ ПЛЕНКИ С АЛМАЗОПОДОБНОЙ СТРУКТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2105379C1 |
| WO 2006022654 A1, 02.03.2006 | |||
| КОНВЕРТОПЛАН | 2010 |
|
RU2488524C2 |
| US 6824096 B2, 30.11.2004. | |||

