Настоящее изобретение относится к конвертоплану, то есть гибридному летательному аппарату с регулируемыми винтами, способному к избирательному принятию «самолетной» конфигурации, в которой винты расположены со своими осями, по существу параллельными продольной оси летательного аппарата, и «вертолетной» конфигурации, в которой винты расположены со своими осями, по существу вертикальными и расположенными поперек продольной оси летательного аппарата с тем, чтобы объединять преимущества турбовинтового летательного аппарата с неподвижным крылом и вертолета.
Способность регулировать свои винты, как описано, дает конвертоплану возможность взлетать и приземляться подобно вертолету, то есть без необходимости во взлетно-посадочной полосе и по чрезвычайно крутым траекториям, чтобы минимизировать фоновый шум и, например, даже взлетать и приземляться в городских зонах; чтобы летать подобно самолету, способному к достижению и поддержанию крейсерской скорости приблизительно 500 км/ч, или на любой скорости, более высокой, чем крейсерская скорость приблизительно в 300 км/ч у вертолета, и типичной крейсерской высоте 7500 м, которая является приблизительно удвоенной по сравнению с вертолетом, и дает ему возможность летать выше большинства облачных образований и атмосферных возмущений.
Другими словами, по отношению к традиционному вертолету, конвертоплан обладает преимуществами почти удвоенной крейсерской скорости; по существу удвоенной дальности и времени полета для заданного полезного груза и топливоснабжения, таким образом, делающими его более дешевым в эксплуатации; и, вдобавок, удвоенной крейсерской высоты, соответственно, делающей его нечувствительным к погодным условиям (облакам, турбулентности) на большей части полета. По отношению к традиционному самолету, с другой стороны, конвертоплан обладает преимуществами способности висения, а также взлетать и приземляться в ограниченных пространствах, даже в городских зонах.
Известные конвертопланы по существу содержат фюзеляж, пару полукрыльев, выступающих на противоположных боковых сторонах фюзеляжа, и пару гондол, которые вмещают соответствующие винты и вращаются, вместе с соответствующими винтами, относительно соответствующих полукрыльев.
Каждая гондола вмещает соответствующий узел двигатель-винт, который, поэтому, вращается вместе с гондолой относительно соответствующего полукрыла.
Подробно, каждая гондола содержит:
- газовую турбину и
- механическую трансмиссию, которая механически соединяет газовую турбину с соответствующим винтом.
Каждая механическая трансмиссия приспособлена для преобразования более высокой частоты вращения газовой турбины в более низкую частоту вращения, необходимую для эффективной работы винтов.
Для этой цели, механическая трансмиссия содержит множество зубчатых передач, валов и подшипников.
Как результат, механическая трансмиссия увеличивает вес, сложность и требования к техническому обслуживанию конвертоплана.
Для того чтобы ослабить все вышеуказанные недостатки, которые связаны с наличием механической трансмиссии, WO-A-2009/079049 раскрывает вертолет, содержащий:
- несущий винт;
- первый электрический двигатель для приведения во вращение несущего винта;
- хвостовой винт и
- второй электрический двигатель для приведения в движение хвостового винта.
Электрический двигатель питается бортовым источником питания, таким как аккумуляторная батарея, гибридным источником электричества или тому подобным.
Однако бортовому источнику питания необходимо периодически подзаряжаться.
В последние годы, внимание было сфокусировано на связанных с окружающей средой проблемах загрязнения воздуха и изменения климата.
Как следствие, ощущается потребность в промышленности подзаряжать бортовой источник питания посредством использования возобновляемого источника энергии, в частности, энергии ветра. К сожалению, энергия ветра особенно трудна для накопления, так как ориентация ветрового течения является переменной.
Известные конвертопланы также содержат механические тормоза для замедления и остановки угловой скорости винтов. Однако механические тормоза тяжелы и содержат гидравлическую систему, которая является дорогостоящей в осуществлении технического обслуживания. Более того, механические тормоза рассеивают в качестве потерянного тепла большое количество энергии.
В промышленности ощущается необходимость затормаживать винты без дорогостоящих и сложных компонентов и/или наряду со снижением количества кинетической энергии, потерянной даром в качестве тепла.
Более того, ощущается необходимость, насколько возможно, ограничивать размер и вес гондол.
Также ощущается потребность производить модульный конвертоплан, на который можно легко устанавливать разные силовые агрегаты.
Известные конвертопланы также могут широко использовать гидравлические приводные системы, например, для поворачивания винтов и/или для приведения в действие шасси, и/или для управления лопастями винта. Гидравлические приводные системы требуют масляного бака на конвертоплане, являются дорогостоящими в осуществлении технического обслуживания, порождают определенную опасность возгорания и требуют, чтобы масло ликвидировалось в окружающей среде.
Ощущается потребность производить конвертоплан, который в как можно большей степени преодолевал недостатки, связанные с использованием гидравлических приводных систем.
Цель настоящего изобретения состоит в том, чтобы предоставить конвертоплан, сконструированный для удовлетворения по меньшей мере одному из вышеприведенных требований простым и недорогим способом.
Согласно настоящему изобретению предложен конвертоплан согласно п. 1 формулы изобретения.
Кроме того, настоящее изобретение относится к способу эксплуатации конвертоплана согласно п. 11 формулы изобретения.
Предпочтительный не ограничивающий вариант осуществления настоящего изобретения далее будет описан в качестве примера со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 - вид в перспективе конвертоплана согласно изобретению в самолетном режиме;
фиг. 2 - вид в перспективе конвертоплана по фиг. 1 в вертолетном режиме;
фиг. 3 - вид в перспективе конвертоплана по фиг. 1 и 2 в режиме перехода между вертолетным и самолетным режимом;
фиг. 4 - вид сверху конвертоплана по фиг. 1-3 в первой рабочей конфигурации;
фиг. 5 - вид сверху конвертоплана по фиг. 1-3 во второй действующей конфигурации;
Фиг. 6 и 7 - поперечные разрезы первых компонентов по фиг. 4, взятые вдоль линий VI-VI и VII-VII, соответственно, по фиг. 6;
фиг. 8 - вид сбоку конвертоплана по фиг. 1-3 во второй рабочей конфигурации;
фиг. 9 - вид в перспективе дополнительного компонента конвертоплана по фиг. 1-4, с частями, удаленными для ясности;
фиг. 10 - поперечный разрез четвертого компонента, взятый вдоль линии X-X по фиг. 9; и
фиг. 11-17 - вид в перспективе соответствующих компонентов конвертоплана по фиг. 1-4, с частями, удаленными для ясности.
Номер 1 на фиг. 1-3 указывает конвертоплан в целом, то есть гибридный летательный аппарат, допускающий избирательную эксплуатацию в самолетном режиме (фиг. 1) или в вертолетном режиме (фиг. 2).
Конвертоплан 1 по существу содержит:
- фюзеляж 2, вытянутый вдоль продольного направления A конвертоплана 1;
- пару полукрыльев 3, которые выступают на противоположных соответствующих боковых сторонах фюзеляжа 2; и
- пару винтов 4.
Подробнее, фюзеляж 2 имеет передний конец 15, задний конец 16, которые противоположны друг другу вдоль направления A и определяют противоположные концы 1 конвертоплана.
Фюзеляж 2 также содержит (фиг. 6):
- передний участок 12, вмещающий кабину 31 экипажа; и
- задний участок 13.
Каждый винт 4 по существу содержит:
- корпус 5;
- вал 6, поддерживаемый корпусом с возможностью вращения вокруг соответствующей оси B; и
- оживальную часть 14, составляющую целую часть с валом 6 с возможностью вращения вокруг соответствующей оси B.
Каждый винт 4 также содержит множество лопастей 27, три в показанном варианте осуществления, которые шарнирно сочленены относительно вала 6 посредством промежуточного размещения ступицы 28.
Подробно, винты 4 вращаются вокруг соответствующих осей B в противоположных направлениях. Таким образом, конвертоплану 1 не нужно устройство предотвращения вращения.
Со ссылкой на фиг. 9, поперечное сечение фюзеляжа 2 в плоскости, параллельной направлению A и перпендикулярной оси C, имеет форму аэродинамического профиля 35.
Точнее, аэродинамический профиль 35 содержит:
- переднюю кромку, которая определена концом 15;
- заднюю кромку, которая определена концом 16;
- верхнюю сторону 37, которая соединяет концы 15 и 16; и
- нижнюю сторону 38, которая соединяет концы 15, 16 на противоположной стороне от верхней стороны 37.
Верхняя сторона и нижняя сторона, 37, 38, в показанном варианте осуществления, обе являются выпуклыми.
Верхняя сторона и нижняя сторона, 37, 38, в показанном варианте осуществления, симметричны относительно прямолинейной хорды 39, которая соединяет кромки 15, 16.
Конвертоплан 1 также содержит:
- V-образный хвост 7, который выступает вверх из участка 13 фюзеляжа 2; и
- множество шасси 9, выступающих вниз из нижней стороны полукрыльев 3.
Каждый винт 4, к тому же, может поворачиваться вместе со своей соответствующей осью B относительно соответствующего полукрыла 3. В частности, винт 4 и соответствующая ось B поворачивается вокруг соответствующей оси C, которая перпендикулярна направлению A.
Точнее, оси B винтов 4 по существу перпендикулярны направлению A, когда конвертоплан 1 эксплуатируется в вертолетном режиме (фиг. 2).
Таким образом, конвертоплан 1 является «так называемым» конвертопланом с поворотным винтом.
Оси B винтов 4 по существу параллельны направлению A, когда конвертоплан 1 эксплуатируется в самолетном режиме (фиг. 1).
Конвертоплан 1 определяет пару сквозных проемов 8, в пределах которых соответствующие винты 4 могут поворачиваться вокруг соответствующей оси C.
В частности, каждое полукрыло 3 определяет соответствующий проем 8.
Каждое полукрыло 3 по существу содержит:
- переднюю кромку 10; и
- заднюю кромку 11, противоположную кромке 10 и взаимодействующую с воздушным потоком за кромкой 10, когда конвертоплан 1 продвигается вдоль направления A.
Передние кромки 10 сходятся, на соответствующих противоположных сторонах, по направлению к фюзеляжу 2, при переходе от V-образного хвоста 7 к концу 15.
Точнее, расстояние, измеренное параллельно оси C между кромками 10, уменьшается, начиная от V-образного хвоста 7 к концу 15.
Каждая передняя кромка 10 содержит (фиг. 4 и 5):
- первый криволинейный отрезок 41, поперечно выступающий на соответствующей стороне фюзеляжа 2; и
- прямолинейный отрезок 42, который определяет продолжение отрезка 41 на соответствующей противоположной стороне фюзеляжа 8.
Каждая задняя кромка 11 содержит:
- прямолинейный отрезок 43, проходящий параллельно направлению C на соответствующей боковой стороне V-образного хвоста 7;
- криволинейный отрезок 44; и
- прямолинейный отрезок 45, противоположный отрезку 44 относительно отрезка 43 и наклоненный относительно направления C.
В результате формы передней и задней кромок 11, 10, полукрылья 3 сконфигурированы как «так называемые» дельтавидные крылья.
Соответствующие кромки 42, 45 выступают вверх из плоскости, определенной направлением A и осью C, с тем чтобы образовать соответствующие винглеты 19, которые скомпонованы на соответствующих противоположных сторонах фюзеляжа 2.
Каждый проем 8 скомпонован между фюзеляжем 2 и соответствующим винглетом 19 параллельно соответствующей оси C и скомпонован между кромками 10, 11 параллельно направлению A.
Каждый проем 8 простирается вокруг оси D и, в показанном варианте осуществления, является округлым.
Более того, каждый проем 8 имеет кромку 29, округлую в показанном варианте осуществления.
Когда конвертоплан 1 эксплуатируется в самолетном режиме (фиг. 1), оси B перпендикулярны соответствующим осям D, и винты 4 выступают с противоположных, верхней и нижней, сторон соответствующих проемов 8.
Когда конвертоплан 1 эксплуатируется в вертолетном режиме (фиг. 2), оси B параллельны соответствующим осям D, и винты 4 полностью встроены в пределах соответствующих проемов 8.
В частности, когда конвертоплан 1 эксплуатируется в вертолетном режиме, толщина винтов 4, параллельно осям D, является меньшей или равной толщине соответствующих проемов 8 параллельно осям D.
Каждое полукрыло 3 содержит (фиг. 4 и 5):
- корпусную часть 17, которая определяет соответствующий проем 8; и
- пару консольных частей 18 крыла, которые с возможностью съема присоединены к корпусной части 17 на соответствующих противоположных сторонах фюзеляжа 2.
Как результат, конвертоплан 1 может эксплуатироваться:
- в первой конфигурации, в которой крылья 18 присоединены и выступают, на противоположных сторонах фюзеляжа 2, из корпусной части 17 (фиг. 4); и
- во второй конфигурации, в которой крылья 18 сняты с корпусной части 17 (фиг. 5).
Точнее, корпусная часть 17 содержит фюзеляж 2 и V-образный хвост 7 и проемы 8.
Корпусная часть 17 ограничена отрезками 41, отрезками 43, 44 и парой стенок 32, которые лежат в плоскости, перпендикулярной оси C.
Поперечное сечение корпусной части 17 в плоскости, перпендикулярной оси C, содержит пару аэродинамических профилей 60, 65.
Аэродинамический профиль 60 ограничен между передней кромкой 10 и кромкой 29 переднего участка 47 вдоль направления A.
Аэродинамический профиль 60 содержит верхнюю сторону 61 и нижнюю сторону 62, которые соединяют кромки 10 и передний участок 47.
Аэродинамический профиль 60 проходит симметрично вокруг прямолинейной хорды 63, которая соединяет кромку 11 и передний участок 47.
Верхняя сторона и нижняя сторона, 61, 62, в показанном варианте осуществления, обе являются выпуклыми.
Аэродинамический профиль 65 ограничен между задним участком 48 кромки 29 и задней кромкой 11 вдоль направления A.
Аэродинамический профиль 65 содержит верхнюю сторону 66 и нижнюю сторону 67, которые соединяют задний участок 48 и заднюю кромку 11.
Верхняя сторона и нижняя сторона, 66, 67, в показанном варианте осуществления, обе являются выпуклыми.
Аэродинамический профиль 65 проходит симметрично вокруг прямолинейной хорды 68, которая соединяет кромку 11 и задний участок 48.
Каждое крыло 18 содержит соответствующий винглет 19 и ограничено соответствующими отрезками 42, 45 на противоположных сторонах.
Каждое крыло 18 также ограничено стенкой 33 на противоположной стороне соответствующего винглета 19.
Стенка 33 каждого крыла 18 присоединена с возможностью съема к соответствующей стенке 32 основной корпусной части 17.
Каждое крыло 18, в частности, является крылом с прямой стреловидностью для обеспечения поперечной боковой устойчивости и уменьшения размаха крыла для получения заданной величины подъемной силы.
Конвертоплан 1 также содержит пару элевонов 40, которые скомпонованы на соответствующих отрезках 45 и на соответствующих сторонах V-образного хвоста 7.
Элевоны 40 шарнирно присоединены к основной корпусной части 17 вокруг оси H, параллельной оси C. Таким образом, элевоны 40 могут двигаться вверх и вниз относительно основной корпусной части 17 для управления креном и тангажем во время горизонтального полета.
Вследствие того обстоятельства, что винты 4 выступают из полукрыльев 3, когда конвертоплан 1 эксплуатируется в качестве летательного аппарата, скорость воздушного потока, действующая на элевоны 40, особенно высока, соответственно увеличивая эффективность элевонов 40.
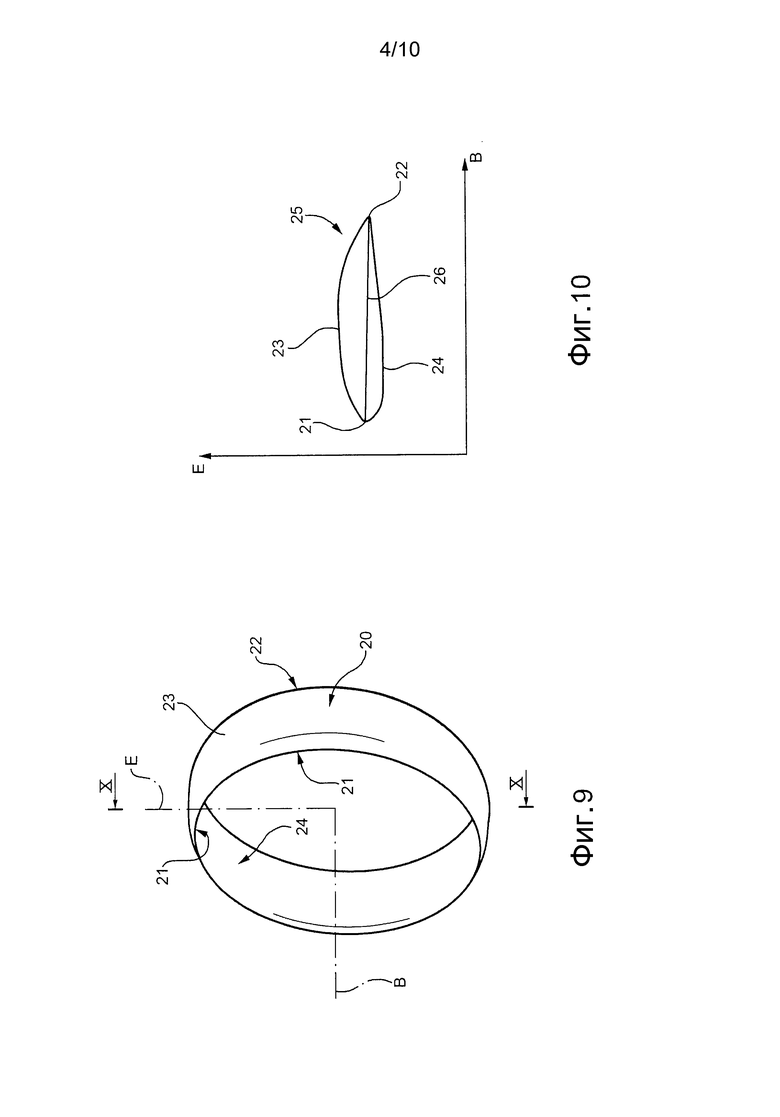
Каждый винт 4 содержит:
- кольцевой кожух 20, который заключает в канал соответствующие лопасти 27; и
- множество спиц 30, которые, на соответствующих противоположных кромках, вставлены между соответствующим кожухом 20 и корпусом 5.
Таким образом, кожух 20 и спицы 30 вращаются как целая часть с лопастями 27 каждого винта 4 вокруг соответствующей оси C, когда конвертоплан 1 переходит из вертолетного и самолетного режима, и наоборот.
Наоборот, кожух 20 и спицы 30 неподвижны относительно оси B каждого винта 4.
Подробнее, каждый кожух 20 простирается вокруг соответствующей оси B и имеет толщину вокруг соответствующей оси E, перпендикулярной соответствующей оси B (фиг. 9 и 10).
Каждый кожух 20 содержит:
- переднюю и заднюю кромки 21, 22, которые противоположны друг другу вдоль соответствующей оси B;
- верхнюю сторону 23, которая соединяет кромки 21, 22; и
- нижнюю сторону 24, противоположную верхней стороне 23 и которая соединяет кромки 21, 22.
Как очевидно из фиг. 6 и 7, поперечное сечение кожуха 20, взятое в плоскости, определенной соответствующими осями E, B, сконфигурировано как аэродинамический профиль 25.
Другими словами, верхняя сторона 23 и нижняя сторона 24 антисимметричны относительно хорды 26, которая соединяет переднюю и заднюю кромки 21, 22.
Подробно, как верхняя сторона 23, так и нижняя сторона 24, являются выпуклыми.
Более того, толщина аэродинамического профиля 25, то есть расстояние между верхней стороной 23 и нижней стороной 24, измеренное вдоль направления F, сначала увеличивается, а затем, уменьшается, начиная от передней кромки 21 к задней кромке 22.
Винты 4 вокруг соответствующих осей могут поворачиваться независимо друг от друга.
Подробно, конвертоплан 1 содержит:
- пару исполнительных механизмов 52, функционально присоединенных к соответствующим винтам 4 и приспособленных поворачивать винты 4 вокруг соответствующих осей C; и
- систему 49 управления полетом (только схематично показана на фиг. 11), выполненную с возможностью управления исполнительными механизмами 52 независимо друг от друга, так что винты 4 могут поворачиваться вокруг соответствующих осей C независимо друг от друга.
Каждый исполнительный механизм 52, в свою очередь, содержит
- неподвижную часть 53;
- цилиндр 54, который может скользить параллельно направлению A относительно части 53; и
- шток 55, имеющий первый конец 56, шарнирно присоединенный к цилиндру 54 вокруг оси, параллельной оси C, и конец 58, который как целая часть поворачивается вместе с кожухом 20 винта 4 вокруг оси C.
Каждый исполнительный механизм 52 также содержит блок 51 управления для управления перемещением цилиндра 54 параллельно направлению A.
Блоки 51 управления, в свою очередь, управляются системой 49 управления полетом на основе множества параметров полета и выполняемой задачи.
Перемещение цилиндра 54 относительно неподвижной части 53 вызывается электродвигателем (не показан).
Более того, каждый исполнительный механизм 52 содержит тягу 59, которая проходит параллельно соответствующей оси C.
Тяга 59 каждого исполнительного механизма 52 содержит (фиг. 11 и 12):
- конец 90, составляющий одно целое с концом 58 штока 55; и
- конец 91, противоположный концу 90 и установленный на кожух 20.
Более точно, конвертоплан 1 содержит множество соединительных элементов 92 (только один из которых показан на фиг. 12) для присоединения соответствующих спиц 30 к кожуху 20.
Подробно, каждый соединительный элемент 92 содержит пару стенок 94, установленных на соответствующую спицу, и центральный участок, установленный на периферийный участок кожуха 20 и соединенный с концом 91 тяги 59.
В частности, каждый конец 91 и соответствующий центральный участок 95 соединены посредством использования шлицевого соединения.
Подробно, центральные участки 95 и концы 91 тяг 59 частично размещены внутри полости, определенной кожухом 20 (фиг. 12).
Начиная с вертолетного режима, каждый исполнительный механизм 52 может поворачивать соответствующий винт 4 по направлению к концу 15 или по направлению к концу 16.
Другими словами, во время перехода из вертолетного в самолетный режим, каждый исполнительный механизм 52 может поворачивать соответствующий винт 4 вперед или назад относительно оси D.
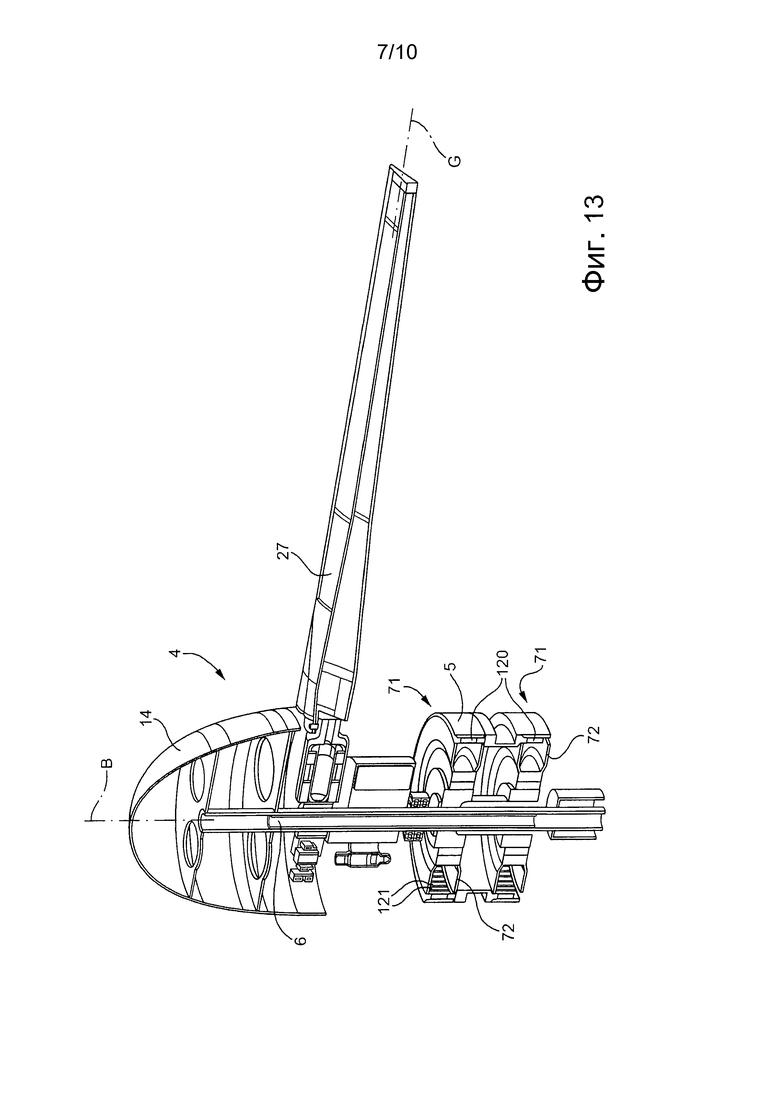
Преимущественным образом, конвертоплан 1 содержит (фиг. с 13 по 16):
- накопитель 70 электрической энергии; и
- две пары электрических машин 71;
каждая электрическая машина 71, в свою очередь, содержит статор 72, электрически присоединенный к накопителю 70, и ротор 73, который присоединен к валу 6 соответствующего винта 4.
Каждая электрическая машина 71 может функционировать в качестве:
- электрического двигателя для непосредственного приведения во вращение соответствующего вала 6 вокруг соответствующих осей B, посредством использования электрической энергии, накопленной в накопителе 70; или
- в качестве генератора электрической энергии для подзарядки накопителя 70 посредством вызывания вращения винта 4 с использованием энергии ветра.
Подробно, конвертоплан 1 может быть организован в самолетном режиме, после того, как было завершено приземление, с винтами 4, повернутыми, с тем чтобы быть обращенными на основное направление ветрового течения.
В таком состоянии, ветровое течение, действующее на лопасти 27, вызывает вращение вала 6.
Соответственно, электрические машины 71 вырабатывают электрический ток, который накапливается внутри накопителя 70.
В частности, роторы 73 присоединены непосредственно к валам 6.
В настоящем описании, выражение «непосредственно присоединенный» используется для указания, что никакой системы передачи не вставлено между ротором 73 и валом 6.
Соответственно, угловая скорость вокруг осей B вала 6 и соответствующих роторов 73 одинакова.
Подробно, когда электрические машины 71 функционируют в качестве электрических двигателей, они питаются электрическим током от накопителя 70.
Подробно, статор 72 каждой электрической машины 71 установлен в пределах корпуса 5 соответствующего винта 4; а ротор 73 каждой электрической машины 71 с возможностью вращения поддерживается статором 72 (фиг. 13).
Статор 72 каждой электрической машины 71 содержит кольцевую корпусную часть 120, вытянутую вдоль соответствующих осей B и определяющую множество разнесенных по углу посадочных мест 121. В частности, посадочные места 121 каждой электрической машины 71 проходят радиально относительно соответствующей оси B.
Статор 72 также содержит магнитный сердечник 79, который определяет спиральный паз 78 (не показан на фиг. 13, но только на фиг. 14).
Сердечник 79 размещен в пределах корпусной части 120, а паз 78 является кольцевым относительно оси B.
Ротор 73 каждой электрической машины 71 содержит пару кольцевых пластин, скомпонованных на соответствующих противоположных осевых сторонах соответствующего статора 72.
Электрические машины 71, в показанном варианте осуществления, являются бесщеточными электрическими машинами с аксиальным потоком, то есть имеют тип, который создает магнитный поток, проходящий преимущественно вокруг оси B.
Каждая электрическая машина 71 также содержит:
- множество обмоток 75, которые намотаны на сердечнике 79, размещенных в пазу 78, и, при использовании, питаются переменным током от накопителя 70; и
- множество постоянных магнитов 76, которые являются составляющими одно целое по углу с ротором 73 и в осевом направлении вставлены между пластинами роторов 73 и корпусной частью 120, с тем чтобы приводиться во вращение вокруг соответствующей оси B магнитным полем, создаваемым обмотками 75.
Постоянные магниты 76 каждой электрической машины 71 являются равно разнесенными по углу вокруг соответствующей оси B.
Электрические машины 71 каждого винта 4 скомпонованы последовательно по отношению к валу 6. Другими словами, общий крутящий момент, которому подвергается вал 6 вокруг оси B, равен сумме крутящих моментов, приложенных каждым электрическим двигателем 71.
Обмотки 75 электрически присоединены к накопителю 70 посредством проводов.
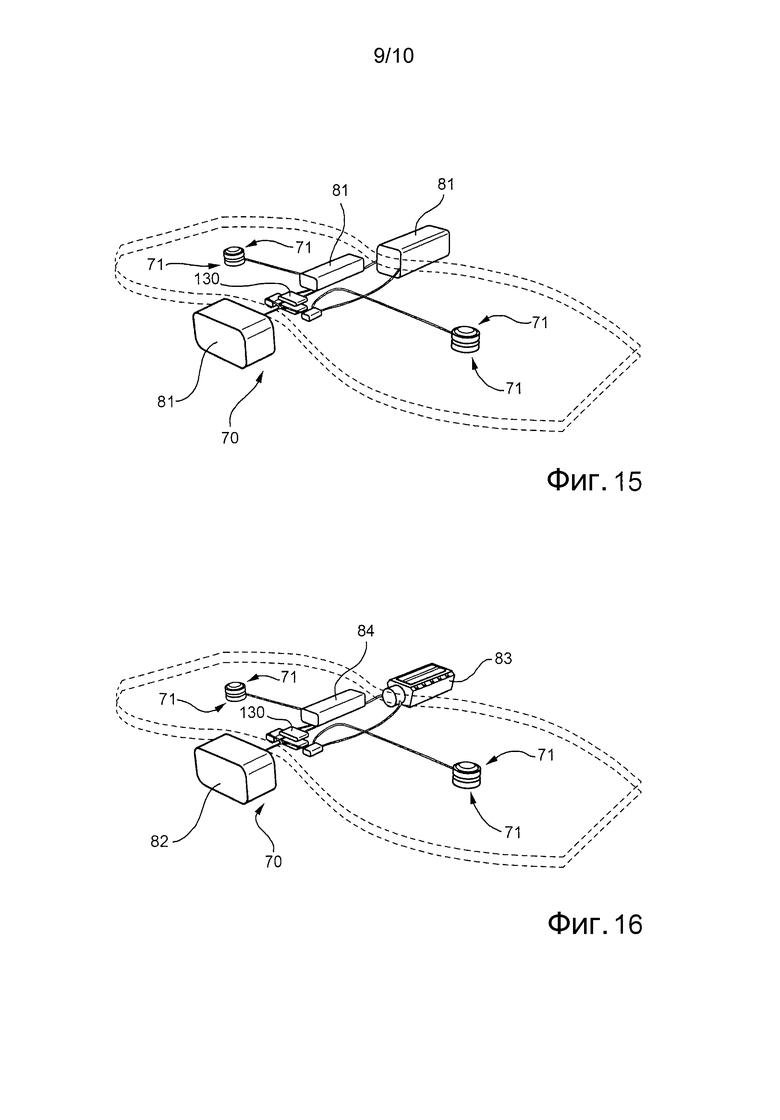
Накопитель 70 может содержать (фиг. 15 и 16):
- одну или более электрических аккумуляторных батарей 81; или
- гибридную аккумуляторную батарею 82 и двигатель 83 внутреннего сгорания, функционально соединенный с упомянутой гибридной аккумуляторной батареей 82.
В варианте осуществления, показанном на фиг. 15, двигатель 83 внутреннего сгорания подзаряжает гибридную аккумуляторную батарею 82. В частности, двигатель 83 внутреннего сгорания является дизельным двигателем и содержит бак 84.
Конвертоплан 1, таким образом, образован:
- общим каркасом, который, в свою очередь, содержит полукрылья 3, фюзеляж 2, винты 4 и электрическую машину 71; и
- модулем, содержащим накопитель 70, который может избирательно присоединяться к упомянутому общему каркасу.
Накопитель 70, в показанном варианте осуществления, является литий-ионной аккумуляторной батареей.
Конвертоплан 1 также содержит контроллер 130 двигателя (фиг. 15 и 16), который принимает электрическую энергию из накопителя 70 и регулирует входную мощность на электрических машинах 71 для управления движением валов 6 винтов 4.
Подробно, контроллер 130 двигателя питается от накопителя 70 постоянным током, преобразует этот постоянный ток в переменный ток и питает электрические машины 71 переменным током.
Электрические машины 71 также могут функционировать в качестве электрического генератора во время фазы торможения соответствующего вала 6, особенно, когда конвертоплан находится на земле после посадки.
В этом состоянии, электрические машины 71 вырабатывают электрический ток, который используется для подзарядки аккумуляторной батареи 81 или аккумуляторной батареи 82. Другими словами, электрические машины 71, когда функционируют в качестве электрического генератора, определяют средство торможения для замедления валов 6 соответствующих винтов 4.
Исполнительные механизмы 52 и аккумуляторная батарея 81 (или 82) скомпонованы на участке 13 фюзеляжа 2.
Фюзеляж 2 может вмещать поддон полезного груза и/или набор датчиков.
Конвертоплан 1 также содержит (Фиг. 17), для каждого винта 4, три исполнительных механизма 100 переменной длины, которые вставлены между корпусом 5 и соответствующими лопастями 27 (фиг. 17).
Подробно, каждая лопасть 27 (только схематично показанная на фиг. 17) проходит вдоль соответствующей оси G и присоединена к ступице 28 соответствующим корневым соединительным элементом 99.
Каждый соединительный элемент 99 содержит C-образный отросток 101, который является эксцентричным относительно соответствующей оси G.
Каждый исполнительный механизм 100 имеет первый конец 102, присоединенный к корпусу 5, и второй конец 103, присоединенный к отростку 101 соответствующей лопасти 27.
Конец 103 каждого исполнительного механизма 100 также может скользить относительно конца 102.
Таким образом, исполнительные механизмы 100 вызывают вращение соответствующих лопастей 27 вокруг соответствующей оси G.
Соответственно, угол атаки каждой лопасти 27 изменяется.
В частности, исполнительные механизмы 100 оба могут изменять:
- угол атаки всех соответствующих лопастей 27, то есть так называемый «общий шаг»; и
- циклическое изменение углов атаки соответствующих лопастей 27 во время их вращения вокруг оси B, то есть так называемый «циклический шаг».
Каждый исполнительный механизм 100 также может использоваться для прикладывания заданной силы к соответствующей лопасти 27, с тем, чтобы подавлять вибрацию этой лопасти 27.
В показанном варианте осуществления, исполнительные механизмы 100 являются электромеханическими. Другими словами, они не содержат гидроконтуры и масляный бак.
Конвертоплан также содержит:
- дополнительный (не показанный) первый исполнительный механизм для управления наклоном элевонов 40; и/или
- дополнительный второй исполнительный механизм (не показан) для управления движением шасси 9.
Первый и второй исполнительные механизмы также являются полностью электромеханическими исполнительными механизмами.
Работа конвертоплана 1 описана, начиная с ситуации, в которой конвертоплан 1 эксплуатируется в вертолетном режиме, и крылья 18 присоединены к корпусной части 17, которая образована фюзеляжем 2 и полукрыльями 3.
Эта конфигурация типична при взлете и/или приземлении конвертоплана 1.
Крылья 18 присоединены к корпусной части 17, когда требуется увеличенное значение подъемной силы.
В частности, когда конвертоплан 1 эксплуатируется в вертолетном режиме, оси B перпендикулярны направлению A и параллельны осям D. Более того, винты 4 и соответствующие кожухи 20 полностью встроены в пределах соответствующих проемов 8. Другими словами, толщина винта 4 и кожухов 20 заключена в пределах размера соответствующих проемов 8, параллельных соответствующим осям D.
Винты 4 вращаются вокруг соответствующих осей C в противоположном направлении относительно друг друга, так что крутящие моменты, прикладываемые винтами 4 к конвертоплану 1, сбалансированы.
Подробно, вал 6 каждого винта 4 приводится во вращение вокруг соответствующей оси B соответствующей парой электрических машин 71, которые, в этом случае, функционируют в качестве электрического двигателя.
Очень кратко, обмотки 75 питаются переменным током от накопителя 70 и создают переменный магнитный поток на постоянных магнитах 76.
В результате, постоянные магниты 76, а потому, ротор 73 и валы 6, приводятся во вращение вокруг соответствующей оси B.
Исполнительные механизмы 100 используются:
- и для изменения угла атаки всех соответствующих лопастей 27, таким образом, изменения так называемого «общего шага»; и/или
- для изменения циклического изменения углов атаки соответствующих лопастей 27 во время их вращения вокруг оси B, таким образом, изменения так называемого «циклического шага».
Когда конвертоплан 1 эксплуатируется в вертолетном режиме, рысканием управляют поворачиванием одного винта 4 по направлению к концу 15 фюзеляжа 2, а другого винта 4 по направлению к концу 16 фюзеляжа 2.
Таким образом, винты 4 создают соответствующие силы, параллельные направлению A, которые равны и противоположны друг другу. В результате, конвертоплан 1 может осуществлять рыскание.
Подробно, система 49 управления полетом управляет исполнительными механизмами 52, которые поворачивают соответствующие винты 4 вокруг соответствующих осей C и независимо друг от друга.
Каждый блок 51 управления управляет скольжением цилиндра 54 параллельно направлению A.
Поступательное движение цилиндров 54 вызывает вращение штоков 55, а потому, соответствующих винтов 4 и кожухов 20 вокруг соответствующих осей C.
Когда необходимо эксплуатировать конвертоплан 1 в самолетном режиме, исполнительные механизмы 52 поворачивают винты 4 и соответствующие кожухи 20 вокруг соответствующих осей C и по направлению к концу 15.
Когда конвертоплан 1 эксплуатируется в самолетном режиме, винты 4 и кожухи 20 частично выступают над соответствующими полукрыльями 3 и частично под полукрыльями 3.
Таким образом, воздушный поток, создаваемый винтами 4, сталкивается с обоими участками полукрыльев 3, скомпонованным ниже винтов 4 и элевонов 40.
Более того, конвертоплан 1 летит, когда эксплуатируется в самолетном режиме, с направлением A, слегка наклоненным относительно горизонтальной плоскости, так что воздушная струя определяет ненулевой угол с хордами 39, 63, 68 аэродинамических профилей 36, 60, 65.
Большая часть подъемной силы обеспечивается крыльями 18.
Оставшаяся часть подъемной силы обеспечивается фюзеляжем 2 и кожухами 20, которые заключают в канал соответствующие винты 4.
Винглеты 19 увеличивают общую аэродинамическую эффективность конвертоплана 1.
Во время горизонтального полета, крен и тангаж управляются вращением элевонов 40 вокруг оси H. Подробно, элевоны 40 могут управляться независимо друг от друга.
V-образный хвост 7 обеспечивает продольную устойчивость в горизонтальном полете, благодаря непоказанным подвижным вертикальным поверхностям.
Винты 4 могут затормаживаться после посадки, когда летательный аппарат находится на земле, посредством функционирования электрических машин 71 в качестве электрического генератора переменного тока вместо электрического двигателя.
Таким образом, замедление винтов 4, а потому, валов 6, подзаряжает аккумуляторные батареи 81 (или 82).
В случае если профиль выполняемой задачи требует, чтобы конвертоплан 1, главным образом, эксплуатировался в вертолетном режиме, крылья 18 отделяются от корпусной части 17, без изменения описанной ранее работы конвертоплана 1.
Когда конвертоплан 1 эксплуатируется в самолетном режиме, он может двигаться назад посредством поворачивания обоих винтов 4 по направлению к концу 16 и с осями B, по существу параллельными направлению A.
Когда конвертоплан 1 находится на земле и накопителю 70 необходимо подзаряжаться, винты 4 поворачиваются вокруг соответствующих осей C в направлении, повернутом к ветровому течению.
На этой стадии, ветровой поток приводит во вращение валы 6 винтов 4, которые, в свою очередь, вызывают вращение роторов 73 электрических машин 71 относительно статоров 72.
Другими словами, электрические машины 71 функционируют в качестве генераторов электрической энергии, которые подзаряжают накопитель 70.
Преимущества конвертоплана 1 согласно настоящему изобретению будут ясны из вышеизложенного описания.
В частности, с одной стороны, конвертоплан 1 не требует тяжелой и сложной механической трансмиссии. С другой стороны, аккумуляторные батареи 81, 82 могут подзаряжаться посредством использования возобновляемого источника энергии, как энергия ветра.
Фактически, когда конвертоплан 1 находится на земле, винты 4 могут поворачиваться вокруг осей C, обращаясь к направлению ветра.
В этом состоянии, ветровое течение приводит во вращение валы 6 винтов 4, которые, в свою очередь, вызывают вращение роторов 73 электрических машин 71 относительно статоров 72.
Как следствие, электрические машины 71 функционируют в качестве генератора электрической энергии, и электрические аккумуляторные батареи 81, 82 подзаряжаются посредством использования возобновляемой энергии, как энергия ветра.
Важно упомянуть, что аккумуляторные батареи 81, 82 могут эффективно подзаряжаться посредством использования энергии ветра, так как винты 4 могут поворачиваться вокруг соответствующих осей C, а потому, могут избирательно располагаться в оптимальном положении для сбора энергии от ветра.
В противоположность, винт вертолета, раскрытый во вступительной части настоящего описания, не может поворачиваться, но просто вращается вокруг своей собственной неподвижной оси. Как результат, этот винт не может избирательно располагаться в заданном оптимальном положении по сбору энергии от ветра, таким образом, делая сбор энергии ветра практически неосуществимым.
Более того, электрические машины 71 также используются в качестве генераторов электрической энергии, когда частоте вращения винтов 4 необходимо снижаться, например, после приземления, когда конвертоплан 1 находится на земле.
Таким образом, конвертоплан 1 больше не требует тяжелого и сложного механического тормоза, и большое количество энергии больше не рассеивается в качестве потерянного тепла, когда затормаживаются винты 4. Более того, электрическая энергия, вырабатываемая электрической машиной 71 во время торможения, используется для подзарядки аккумуляторных батарей 81, 82.
Вал 6 каждого винта 4 присоединен непосредственно к двум роторам 73 соответственных электрических машин 71. Другими словами, две электрические машины 71 скомпонованы «последовательно», что касается каждого вала 6.
Таким образом, конвертоплан 1 предлагает дублирование в случае отказа одной из электрических машин 71. Фактически, в этом случае, мощность, выдаваемая оставшейся электрической машиной 71, достаточна для предоставления конвертоплану 1 возможности планировать в самолетном режиме.
Более того, так как две электрические машины 71 непосредственно приводят во вращение один и тот же вал 6, диаметр статоров 72 может быть уменьшен.
В дополнение, электрические машины 71 являются электрической машиной с аксиальным потоком. Как следствие, отношение между вырабатываемой мощностью и весом является особенно высоким.
Электрические машины 71 могут питаться от электрической аккумуляторной батареи 81 или от гибридной аккумуляторной батареи 82.
Таким образом, конвертоплан 1 может легко и избирательно переключаться из полностью электрической конфигурации в гибридную дизель-электрическую конфигурацию.
В заключение, исполнительные механизмы 52, 100 и дополнительные исполнительные механизмы для управления элевонами 40 и шасси 9 все являются электромеханическими исполнительными механизмами без каких бы то ни было гидравлических компонентов.
Соответственно, общий вес и стоимость технического обслуживания конвертоплана 1 сильно снижаются.
Ясно, что изменения могут быть произведены в отношении конвертоплана 1, который описан и проиллюстрирован в материалах настоящей заявки, однако, не выходя из объема настоящего изобретения, который определен в сопровождающей формуле изобретения.
В частности, конвертоплан 1 мог бы содержать только один винт 4, который может поворачиваться вокруг оси C в пределах только одного проема 8. В этом случае, не показанное устройство предотвращения вращения присутствовало бы на конвертоплане 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С АРОЧНЫМ КРЫЛОМ | 2017 |
|
RU2648503C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| КОНВЕРТОПЛАН И СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ | 2018 |
|
RU2736668C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| МНОГОВИНТОВОЙ ГИБРИДНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2543120C1 |
| БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2013 |
|
RU2527248C1 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| КОНВЕРТОПЛАН | 2011 |
|
RU2456208C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| КОНВЕРТОПЛАН И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2019 |
|
RU2786262C1 |







Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Конвертоплан (1) содержит пару полукрыльев (3), по меньшей мере один первый винт (4), содержащий вал (6), который может вращаться вокруг первой оси (B) и поворачиваться вокруг второй оси (C) вместе с первой осью (B) относительно полукрыльев (3). Первая ось (B) является поперечной продольному направлению (A) конвертоплана (1) в вертолетном режиме и является параллельной продольному направлению (A) в самолетном режиме. Конвертоплан (1) содержит накопитель (70; 81, 82) электрической энергии. Электрическая машина (71) содержит статор (72), который электрически присоединен к накопителю (70; 81, 82), и второй ротор (73), который присоединен к валу (6) первого винта (4). Электрическая машина (71) действует в качестве электрического двигателя для приведения во вращение упомянутого первого винта (4) посредством использования электрической энергии, накопленной в накопителе (70; 81, 82) или в качестве генератора электрической мощности для подзарядки накопителя (70, 81, 82) посредством вращения второго винта (4) под действием ветра. Достигается возможность зарядки накопителя энергии от возобновляемых источников энергии. 2 н. и 10 з.п. ф-лы, 17 ил.
1. Конвертоплан (1), содержащий:
- пару полукрыльев (3);
- по меньшей мере один первый винт (4), содержащий вал (6), который может вращаться вокруг соответствующей первой оси (B) и поворачиваться вокруг соответствующей второй оси (C) вместе с упомянутой первой осью (B) относительно упомянутых полукрыльев (3) между вертолетным режимом и самолетным режимом;
упомянутая первая ось (B), при использовании, является поперечной продольному направлению (A) упомянутого конвертоплана (1) в упомянутом вертолетном режиме, и, при использовании, является по существу параллельной упомянутому продольному направлению (A) в упомянутом самолетном режиме;
отличающийся тем, что содержит:
- накопитель (70; 81, 82) электрической энергии; и
- по меньшей мере одну электрическую машину (71);
упомянутая электрическая машина (71), в свою очередь, содержит:
- статор (72), который электрически присоединен к упомянутому накопителю (70; 81, 82); и
- второй ротор (73), который функционально присоединен к валу (6) упомянутого первого винта (4);
упомянутая электрическая машина (71) является работающей в качестве:
- электрического двигателя для приведения во вращение упомянутого первого винта (4) посредством использования электрической энергии, накопленной в упомянутом накопителе (70; 81, 82); или
- в качестве генератора электрической энергии для подзарядки упомянутого накопителя (70; 81, 82) посредством вызывания вращения упомянутого первого винта (4) под действием ветрового течения;
упомянутый первый винт (4) является поворачиваемым вокруг упомянутой второй оси (C) в направлении, обращенном к ветровому течению, когда упомянутый конвертоплан (1) находится на земле, и упомянутому накопителю (70; 81, 82) необходимо подзаряжаться.
2. Конвертоплан по п. 1, отличающийся тем, что упомянутый второй вал (6) и упомянутый первый винт (4) присоединены непосредственно друг к другу.
3. Конвертоплан по п. 1, отличающийся тем, что упомянутая электрическая машина (71) определяет, когда работает в качестве генератора электрической энергии, средство торможения для замедления упомянутого вращательного движения первого винта (4) наряду с зарядкой упомянутого накопителя (70).
4. Конвертоплан по любому одному из предыдущих пунктов, отличающийся тем, что упомянутая электрическая машина (71) является электрической машиной с аксиальным потоком, которая, при использовании, создает магнитный поток с основной составляющей, параллельной упомянутой первой оси (B).
5. Конвертоплан по любому одному из пп. 1-3, отличающийся тем, что упомянутая электрическая машина (71) является бесщеточной электрической машиной.
6. Конвертоплан по п. 1, отличающийся тем, что упомянутая электрическая машина (71) содержит:
- по меньшей мере один постоянный магнит (76), подвижный с упомянутым вторым ротором (73) как целая часть; и
- по меньшей мере одну обмотку (75), встроенную в упомянутый статор (72), магнитно связанный с упомянутым постоянным магнитом (76), и которая может электрически питаться от упомянутого накопителя (70; 81, 82).
7. Конвертоплан по п. 6, отличающийся тем, что содержит две упомянутые электрические машины (71), содержащие соответственные первые винты (4), которые присоединены непосредственно к упомянутому валу (6) упомянутого первого винта (4).
8. Конвертоплан по п. 1, отличающийся тем, что содержит:
- общий каркас, содержащий упомянутый первый винт (4) и упомянутую электрическую машину (71); и
- модуль, содержащий упомянутый накопитель (70; 81, 82), который может избирательно присоединяться к упомянутому общему каркасу;
упомянутый накопитель (70; 81, 82) содержит:
- или электрическую аккумуляторную батарею (81); или
- гибридную аккумуляторную батарею (82) и двигатель (83) внутреннего сгорания, функционально соединенный с упомянутой гибридной аккумуляторной батареей (82).
9. Конвертоплан по п. 8, отличающийся тем, что упомянутый двигатель (83) внутреннего сгорания является дизельным двигателем.
10. Конвертоплан по любому одному из пп. 1-3, 6 или 8, отличающийся тем, что содержит:
- множество лопастей (27), шарнирно сочлененных относительно упомянутого вала (6); и/или
- по меньшей мере один элевон (40), подвижный относительно упомянутых полукрыльев (3); и/или
- по меньшей мере одно шасси (9), которое может выдвигаться или втягиваться; и/или
- по меньшей мере один первый исполнительный механизм (100) для изменения положения соответствующей упомянутой лопасти (27) упомянутого первого винта (4) относительно упомянутого вала (6); и/или
- по меньшей мере один второй исполнительный механизм (52) для управления поворачиванием упомянутого первого винта (4) вокруг соответствующей второй оси (C); и/или
- по меньшей мере один третий исполнительный механизм для управления положением упомянутого элевона (40) относительно упомянутых полукрыльев (3); и/или
- по меньшей мере один дополнительный четвертый исполнительный механизм для управления выдвиганием/втягиванием упомянутого шасси (9);
- по меньшей мере один из упомянутых первого, второго, третьего и четвертого исполнительных механизмов (100, 52) является электромеханическим исполнительным механизмом.
11. Способ функционирования конвертоплана (1), упомянутый конвертоплан (1) содержит:
- пару полукрыльев (3);
- по меньшей мере один первый винт (4), который может вращаться вокруг соответствующей первой оси (B) и поворачиваться вокруг соответствующей второй оси (C) вместе с упомянутой первой осью (B) относительно упомянутых полукрыльев (3) между вертолетным режимом и самолетным режимом;
упомянутая первая ось (B), при использовании, является поперечной продольному направлению (A) упомянутого конвертоплана (1) в упомянутом вертолетном режиме, и, при использовании, является по существу параллельной упомянутому продольному направлению (A) в упомянутом самолетном режиме;
упомянутый способ отличается тем, что содержит этапы:
- функционирование электрической машины (71) в качестве электрического двигателя для приведения во вращение упомянутого первого винта (4) посредством использования электрической энергии, накопленной в накопителе (70; 81, 82) электрической энергии; и
- функционирование упомянутой электрической машины (71) в качестве генератора электрической энергии для подзарядки упомянутого накопителя (70; 81, 82);
упомянутый этап функционирования упомянутой электрической машины (71) в качестве генератора электрической энергии содержит этап, на котором используют энергию ветра для приведения во вращение упомянутого первого винта (4);
упомянутый конвертоплан (1) содержит:
- упомянутый накопитель (70; 81, 82) электрической энергии; и
- упомянутую по меньшей мере одну электрическую машину (71);
упомянутая электрическая машина (71), в свою очередь, содержит:
- статор (72), который электрически присоединен к упомянутому накопителю (70; 81, 82); и
- второй ротор (73), который функционально присоединен к упомянутому первому винту (4);
отличающийся тем, что содержит этап, на котором поворачивают упомянутый первый винт (4) на заданный угол вокруг упомянутой второй оси (C) перед упомянутым этапом функционирования упомянутой электрической машины (71) в качестве электрического двигателя, когда упомянутый конвертоплан (1) находится на земле, и упомянутому накопителю (70; 81, 82) необходимо подзаряжаться;
упомянутый заданный угол является связанным с основным направлением ветрового течения.
12. Способ по п. 11, отличающийся тем, что упомянутый этап функционирования упомянутой электрической машины (71) в качестве генератора электрической энергии содержит этап торможения упомянутого первого винта (4).
| US 3335977 A, 15.08.1967 | |||
| WO 2010137016 A2, 02.12.2010 | |||
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| WO 2011023396 A2, 03.03.2011 | |||
| US 2010038473 A1, 18.02.2010. | |||

