Изобретение относится к маховым движителям, которые можно использовать для передвижения аппаратов в воздушной и водной средах.
Известны маховые движители в летательных аппаратах: патенты RU 2270136, RU 2138424, RU 2279374, RU 2298509, RU 2375253 - все они имеют один или два маховых механизма, которые не могут использовать эффект волны для создания дополнительной тяги. У змей, плывущих в воде, рыб типа камбалы, этот эффект - основной источник тяги.
Цель изобретения использование эффекта волны для создания дополнительной тяги.
Цель достигается тем, что маховый движитель, содержащий маховый механизм, лонжероны с маховыми плоскостями, состоит из ряда маховых механизмов установленных вдоль аппарата, которые имеют ведуще-управляющие диски с пазами на боковой поверхности, укрепленные на ведущем валу таким образом, что каждый последующий диск повернут относительно предыдущего на определенный угол. В паз вставлен палец, с возможностью скольжения, который укреплен на нижнем конце ползуна, находящегося в канале, с возможностью возвратно-поступательных движений. Верхний конец ползуна с помощью шарниров и шатунов, либо рычага и шарниров крепится к лонжеронам маховых плоскостей.
Подобной цели можно достичь с помощью кривошипно-шатунного механизма соединенного с маховыми плоскостями, но изготовление коленчатого вала с угловым смещением каждого колена - очень сложно.
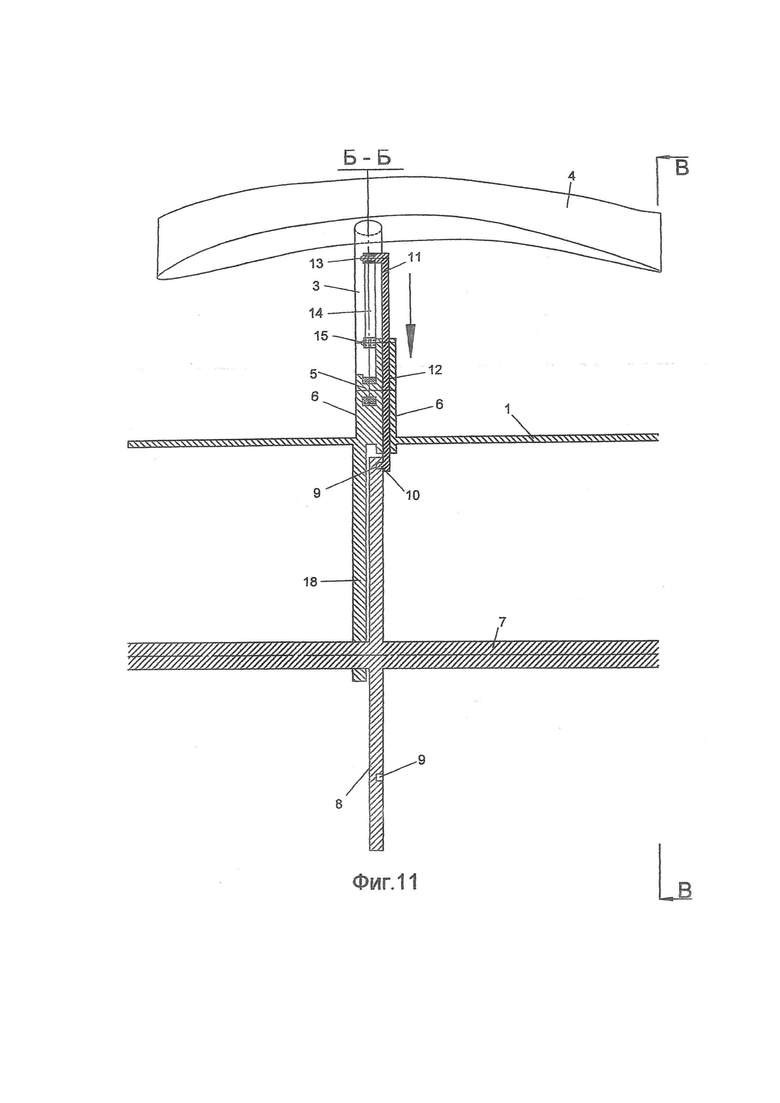
На фиг. 1 изображен маховый движитель «Волномах», вид сбоку; на фиг. 2 то же, вид сверху; на фиг. 3 то же, разрез А - А на фиг. 1, 2; на фиг. 4-9 кинематические схемы некоторых возможных вариантов маховых механизмов МД «Волномах»: на фиг. 4 вариант 1, ползунно-шатунный, симметричный, на фиг. 5 вариант 2, ползунно-рычажный, симметричный, на фиг.6 вариант 3, ползунно-шатунный, асимметричный, с одной управляюще-приводной кинематической цепью, на фиг. 7 вариант 4, ползунно-рычажный, асимметричный, с одной управляюще-приводной кинематической цепью, на фиг.8 вариант 5, ползунно-шатунный, асимметричный, с двумя управляюще-приводными кинематическими цепями, на фиг. 9 вариант 6, ползунно-рычажный, асимметричный, с двумя управляюще-приводными кинематическими цепями; на фиг. 10 маховый механизм вариант 1, ползунно-шатунный, симметричный, вид В - В на фиг.11; на фиг.11 то же, разрез Б - Б на фиг. 10.
Маховый движитель «Волномах» состоит из ряда последовательно установленных в верхней части корпуса 1, см. фиг.1-3, воздушного или подводного аппарата маховых механизмов 2, соединенных с помощью лонжеронов 3 с маховыми плоскостями 4, которые крепятся к последним с возможностью колебания вокруг продольных осей. Лонжероны 3 шарниром 5 и кронштейном 6 связаны с корпусом 1 аппарата, а на ведущий вал 7, укрепленный в корпусе 1, жестко крепятся ведуще-управляющие диски 8 маховых механизмов 2, причем каждый последующий диск 8, относительно предыдущего, повернут вокруг оси ведущего вала 7 на определенный угол.
Маховые механизмы 2 могут иметь в своей основе, как кривошипно-шатунный механизм, так и другие. Далее представляю кинематические схемы шести вариантов на основе ведуще-управляющих дисков 8.
Вариант 1. Ползунно-шатунный, симметричный, см. фиг. 4, ведуще-управляющий диск 8, жестко укрепленный на ведущем валу 7, имеет на боковой поверхности паз 9, в который входит, с возможностью скольжения, палец 10, укрепленный в нижнем конце ползуна 11. Последний установлен в канале 12, с возможностью возвратно-поступательного движения, устроенном в кронштейне 6. К верхнему концу ползуна 11, с помощью шарниров 13, крепятся шатуны 14, нижние концы которых шарнирами 15 связаны с лонжеронами 3. Последние шарниром 5 и кронштейном 6 связаны с корпусом 1 аппарата.
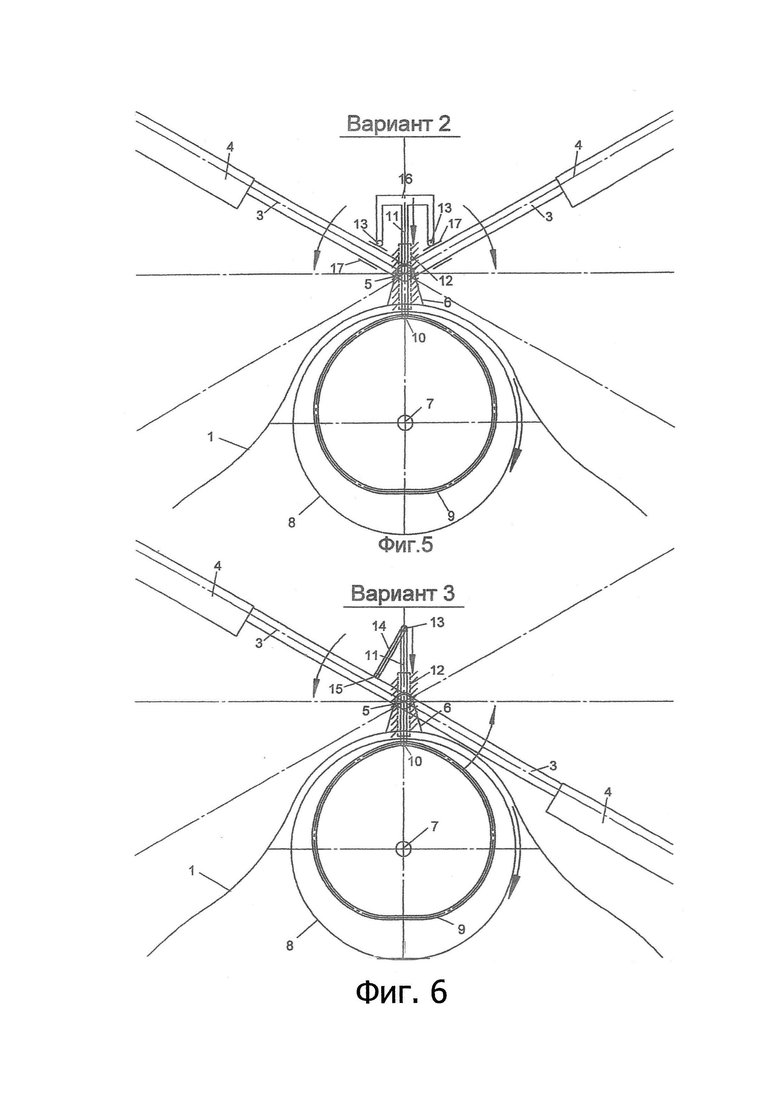
Вариант 2. Ползунно-рычажный, симметричный, см. фиг. 5, отличается от варианта 1 тем, что к верхнему концу ползуна 11 жестко крепится рычаг 16 на концах которого устроены шарниры 13 с прикрепленными к ним поступательными шарнирами 17, в которых находятся лонжероны 3.
Вариант 3. Ползунно-шатунный, асимметричный, с одной управляюще-приводной кинематической цепью, см. фиг. 6, отличается от варианта 1 тем, что правый и левый лонжероны 3 выполнены как единое целое, а один из шатунов 14 отсутствует.
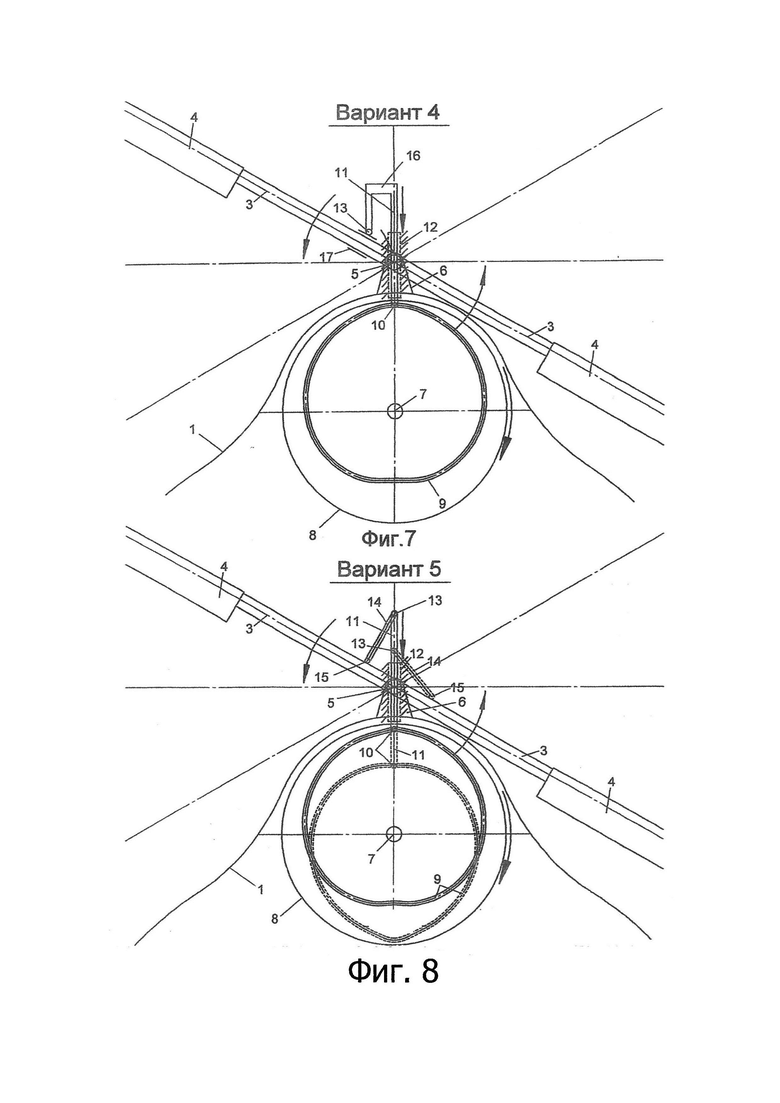
Вариант 4. Ползунно-рычажный, асимметричный, с одной управляюще-приводной кинематической цепью, см. фиг. 7, отличается от варианта 2 тем, что правый и левый лонжероны 3 выполнены как единое целое, а рычаг 16 имеет одно плечо.
Вариант 5. Ползунно-шатунный, асимметричный, с двумя управляюще-приводными кинематическими цепями, см. фиг. 8, отличается от варианта 3 наличием второй управляюще-приводной кинематической цепи, находящейся на обратной стороне диска 8 и состоящей из паза 9, пальца 10, ползуна 11 в канале 12, шатуна 14 с шарнирами 13 и 15. Причем паз 9 на обратной стороне диска 8 выполнен в противофазе по отношению к пазу 9 на прямой стороне диска.
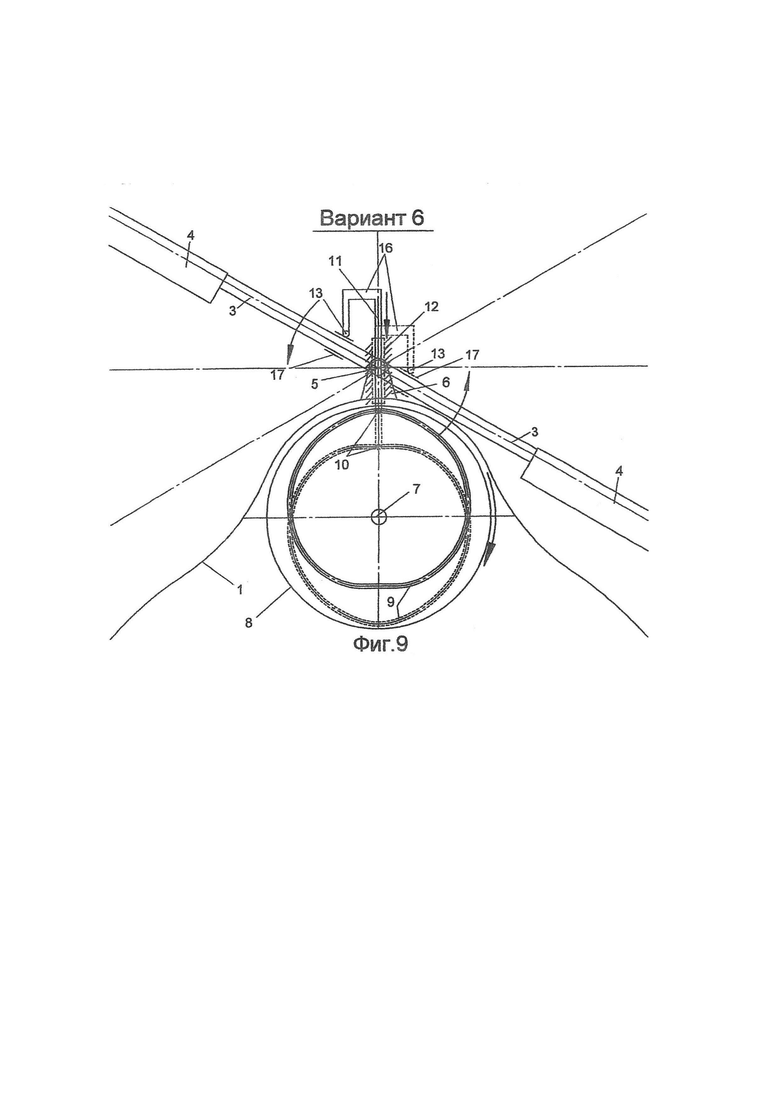
Вариант 6. Ползунно-рычажный, асимметричный, с двумя управляюще-приводными кинематическими цепями, см. фиг.9, отличается от варианта 4 наличием второй управляюще-приводной кинематической цепи, находящейся на обратной стороне диска 8 и состоящей из паза 9, пальца 10, ползуна 11 в канале 12, рычага 16 с шарнирами 13 и 17. Причем паз 9 на обратной стороне диска 8 выполнен в противофазе по отношению к пазу 9 на прямой стороне диска.
Если принять смещение ползуна 11 dh прямо пропорциональным углу поворота диска 8 ах, т.е.
dh/h=ax/180, где h - максимальное смещение ползуна 11 при повороте диска 8 на 180 градусов, то уравнение оси паза 9 на прямой стороне диска 8 в полярных координатах:
Yx=R-c-ax*h/180, где Yx - расстояние от оси диска 8 до оси паза 9 в точке х, ах - угол поворота диска 8 в точке х, R - радиус диска, с - минимальное расстояние от оси паза 9 до края диска 8.
Кривая оси паза 9 на обратой стороне диска 8, см. вариант 5 на фиг. 8, зависит от кривой оси паза 9 на прямой стороне и уравнение в общем виде:
Yx обратн=R-c-h+dhx обратн, где: Yx обратн - расстояние от оси диска 8 до оси паза 9 в точке х при повороте диска 8 на угол ах. Формулу зависимости dhx обратн от ах не представляю из-за достаточной громоздкости и излишней детализации. Кривая оси паза 9, см. вариант 6 на фиг. 9, на обратной стороне диска 8 изображена условно, без расчета.
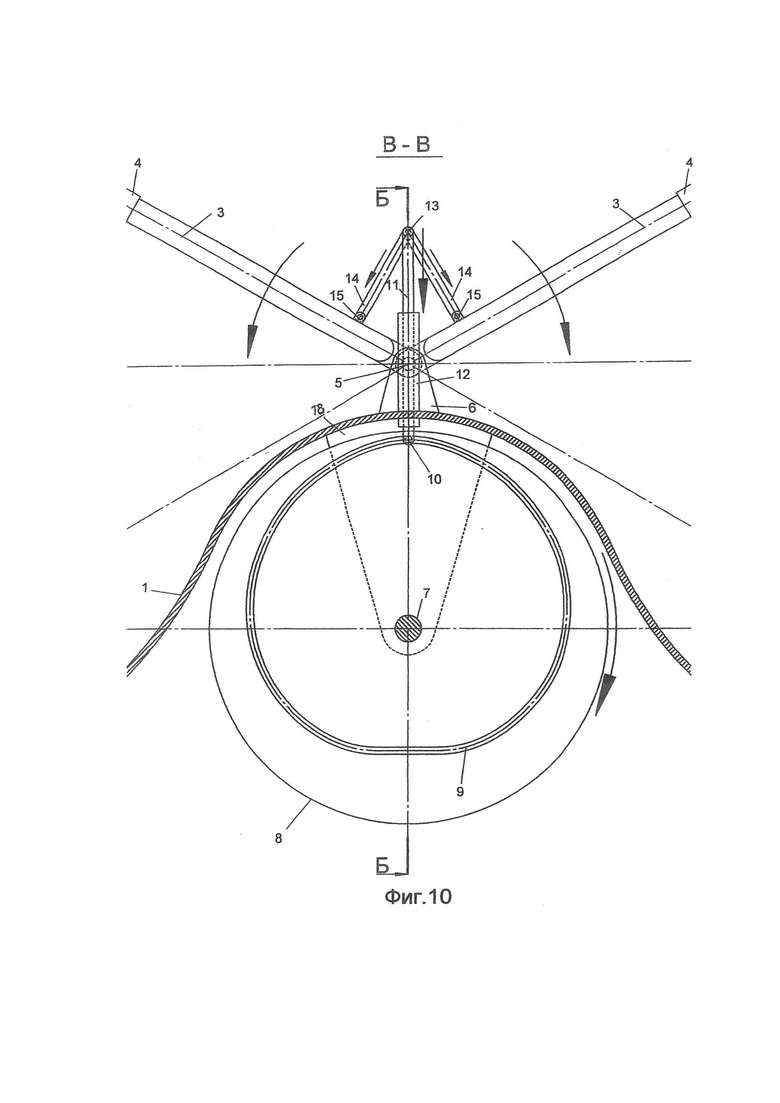
На фиг. 10, 11 изображен вариант 1 ползунно-шатунный, симметричный, махового механизма 2, состоящего из лонжеронов 3 с прикрепленными к ним маховыми плоскостями 4, имеющими возможность колебания вокруг продольных осей. Лонжероны 3 шарниром 5 и кронштейном 6 связаны с корпусом 1 аппарата, а на ведущий вал 7, укрепленный в корпусе 1, жестко крепится ведуще-управляющий диск 8 с устроенным на его боковой поверхности пазом 9. В последний входит с возможностью скольжения, палец 10, укрепленный в нижнем конце ползуна 11, который установлен в канале 12, с возможностью возвратно-поступательного движения, устроенном в кронштейне 6. К верхнему концу ползуна 11 с помощью шарниров 13 крепятся шатуны 14, нижние концы которых шарнирами 15 связаны с лонжеронами 3. Ведущий вал 7 с помощью кронштейна 18 крепится к корпусу 1 аппарата.
Поверхность паза 9 и пальца 10 выполнены из материала с малым коэффициентом трения, а второй конец пальца 10 вставлен в подшипник качения установленный в ползун 11.
Маховая плоскость 4 для воздушного аппарата в поперечном сечении имеет аэродинамический профиль близкий к типу Геттинген №406,451 и т.п. для создания подъемной силы, а для подводного аппарата каплевидную форму, уменьшающую лобовое сопротивление движению в воде при нулевой плавучести. Угол атаки плоскости 4 регулируется в зависимости от направления движения плоскости вверх - вниз, назначения и типа аппарата (воздушный, подводный). Количество маховых механизмов 2 в аппарате также зависит от типа и назначения аппарата. В маховых движителях для подводных аппаратов маховые плоскости могут быть заменены на гибкую, эластичную ленту, закрепленную на лонжеронах.
Маховый движитель «Волномах» работает следующим образом. Ведущий вал 7, см. фиг. 10, 11, получая вращающее усилие от двигателя, передает его ведуще-управляющим дискам 8 маховых механизмов 2, которые, получая вращение, перемещают ползуны 11 в каналах 12 с помощью пазов 9 и пальцев 10. Ползуны 11 через шарниры 13, шатуны 14 и шарниры 15 передают усилие лонжеронам 3, которые совершают машущие движения вокруг шарниров 5 вместе с маховыми плоскостями 4. При повороте диска 8 на 180 градусов палец 10 перемещается из крайнего верхнего положения в крайнее нижнее, соответствующим образом перемещаются лонжероны 3 с плоскостями 4, благодаря кинематической цепи ползун 11, шарниры 13, шатуны 14, шарниры 15. Далее при повороте диска 8 от 180 до 360 градусов происходит обратное перемещение пальца 10 и лонжеронов 3 с плоскостями 4 из крайнего нижнего положения в крайнее верхнее, т.е. в течении одного оборота диска 8 производится один мах махового механизма 2. Поскольку каждый последующий маховый механизм 2 имеет диск 8 повернутый на определенный угол относительно предыдущего, то при вращении вала 7 образуется бегущая волна из маховых плоскостей 4, как это происходит у плывущих змей, камбалы и им подобных, которая создает дополнительную тягу, кроме создаваемой от каждой плоскости 4. Причем вращение вала 7 должно быть в определенную сторону, в соответствии с конструкцией маховых механизмов 2, т.е. волна должна бежать от носа к хвосту аппарата, см. фиг. 1, иначе она будет создавать обратную тягу. Если вращение вала 7, см. фиг. 10, по часовой стрелке, то каждый последующий диск 8, начиная от носа аппарата к хвосту, должен быть повернут против часовой стрелки на определенный угол.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексная грузо-пассажирская переправа через водоток с приводом от водяного колеса | 2019 |
|
RU2713312C1 |
| ТУРБОДИСК | 2014 |
|
RU2572980C1 |
| УСТРОЙСТВО, СОЗДАЮЩЕЕ ПОТОК В ГАЗАХ И ЖИДКОСТЯХ | 2012 |
|
RU2525045C2 |
| Автолет | 2021 |
|
RU2768060C1 |
| ВОДЯНОЕ КОЛЕСО И СПОСОБ ЖЕСТКОГО ЗАКРЕПЛЕНИЯ ЕГО ОСИ НА ДНЕ ВОДОТОКА | 1991 |
|
RU2010991C1 |
| РЕВОЛЬВЕР-ПУЛЕМЕТ | 2017 |
|
RU2674393C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2009945C1 |
| СБОРНО-РАЗБОРНЫЙ ВОДНЫЙ ВЕЛОСИПЕД | 1991 |
|
RU2011603C1 |
| МАХОЛЕТ "ПЧЕЛА" | 1991 |
|
RU2007337C1 |
| СУДОВОЙ ИМПУЛЬСНО-РЕАКТИВНЫЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2064878C1 |


Изобретение относится к маховым движителям и может быть применено для воздушных и подводных аппаратов. Маховый движитель содержит ряд маховых механизмов, установленных вдоль аппарата. Маховые механизмы имеют ведуще-управляющие диски с пазами на боковой поверхности, укрепленные на ведущем валу. Каждый последующий диск повернут относительно предыдущего на определенный угол 360/n, где n – количество маховых плоскостей. В паз вставлен палец, с возможностью скольжения, который укреплен на нижнем конце ползуна. Последний находится в канале, с возможностью возвратно-поступательных движений. Верхний конец ползуна с помощью шарниров и шатунов либо рычага и шарниров крепится к лонжеронам. Обеспечивается создание тяги движителем за счет волнового движения маховых плоскостей. 11 ил.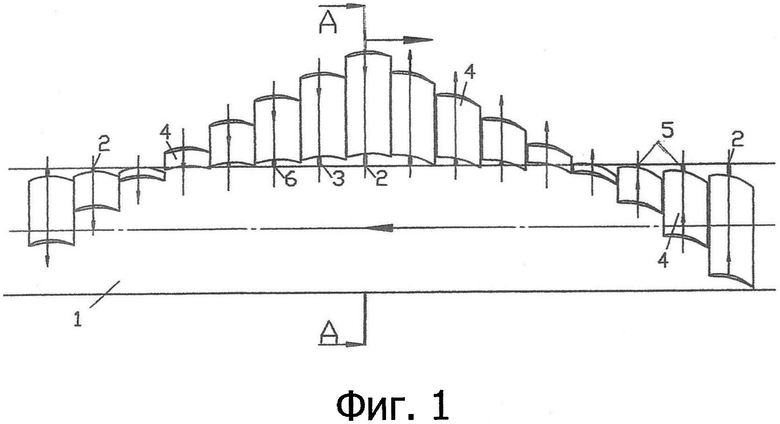
Маховый движитель, содержащий маховый механизм, лонжероны с маховыми плоскостями, отличающийся тем, что состоит из ряда маховых механизмов, установленных вдоль аппарата, которые имеют ведуще-управляющие диски с пазами на боковой поверхности, укрепленные на ведущем валу таким образом, что каждый последующий диск повернут относительно предыдущего на определенный угол, в паз вставлен палец с возможностью скольжения, который укреплен на нижнем конце ползуна, находящегося в канале, с возможностью возвратно-поступательных движений, верхний конец с помощью шарниров и шатунов либо рычага и шарниров крепится к лонжеронам.
| СПОСОБ ПОЛУЧЕНИЯ МЕТАЛЛИЧЕСКОГО БАРИЯ В ЭЛЕКТРОВАКУУМНЫХ ПРИБОРАХ | 1940 |
|
SU60479A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ МОЙКИ И СУШКИ ВЫМЕНИ КОРОВЫ ПЕРЕД ДОЙКОЙ | 0 |
|
SU174034A1 |
| JP 2012180050 A, 20.09.2012 | |||
| ДВИЖИТЕЛЬ СУДНА | 2005 |
|
RU2285634C1 |
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2488518C1 |

