Изобретение относится к судостроению, а именно к волновым движителям надводных и подводных судов. Оно может быть также использовано в качестве вибрационного конвейера, а также в качестве наглядного пособия для демонстрации волнового движения.
Известен движитель судна, содержащий лопасть, соединенную с приводом ее поступательного и углового колебаний, включающим в себя кривошипно-ползунный синусный механизм с кривошипом, взаимодействующим посредством шатуна с ползуном, шарниры и поступательную пару (Патент РФ №2143375, В 63 Н 1/37, 1998).
Недостатком известного движителя судна является сложность конструкции привода лопасти волнового движителя, связанная с большим количеством звеньев его механизма.
Прототипом заявляемого изобретения является движитель судна, содержащий лопасть, соединенную с приводом ее поступательного и углового колебаний, включающим в себя кулису с ползуном, взаимодействующим с неподвижным кулачком и шарнирно соединенным с шатуном, который, в свою очередь, также шарнирно соединен с ползуном, смонтированным в направляющей (А.с. НРБ №38987, МПК В 63 Н 1/36, 1986).
Недостатком известного движителя судна является недостаточно точное копирование лопастью при движении синусоиды, что повышает сопротивление движению лопасти в воде и снижает к.п.д. движителя.
Задачей создания изобретения является повышение эффективности движителя судна за счет более точного копирования лопастью при движении синусоиды, что позволяет снизить сопротивление движению лопасти волнового движителя и повышает к.п.д. движителя.
Технический результат достигается за счет того, что в движителе судна, содержащем лопасть, соединенную с приводом ее поступательного и углового колебаний, включающим в себя кулису с ползуном, взаимодействующим с неподвижным кулачком и шарнирно соединенным с шатуном, который, в свою очередь, также шарнирно соединен с ползуном, смонтированным в направляющей, причем лопасть жестко соединена с шатуном, а ее плоскость проходит через шарнир, соединяющий шатун с ползуном, кулачок выполнен в форме, описываемой параметрическими уравнениями
х=lsin(α0sint),
у=Acost+l[cos(α0sint)-cosα0],
где А - амплитуда перемещения лопасти; l - длина шатуна, l=[2...6)А; α0 - амплитуда поворота лопасти, α0=π/12...π/6; t - параметр, равный углу поворота кулисы, 0≤t≤2π.
Дополнительно движитель судна может содержать две или более лопасти с приводом поступательного и углового колебаний, аналогичных первым и расположенные в ряд, при этом направляющие ползунов параллельны друг другу, размеры соответствующих звеньев приводов всех лопастей равны, приводы лопастей состоят в кинематической связи с передаточным отношением, равным единице, а углы ϕ взаимного поворота кулис относительно друг друга пропорциональны порядковому номеру лопасти в ряде:
где n - порядковый номер лопасти в ряду; N - общее число лопастей.
Предпочтительно число лопастей в ряду равно от трех до пяти. Как вариант, кинематическая связь выполнена в виде установленных на валах кулис шестерен с одинаковым числом зубьев, соединенных посредством промежуточных шестерен. Параллельно ряду лопастей может быть расположен соединенный с днищем судна экран.
Сущность изобретения поясняется чертежами, где
на фиг.1 показана принципиальная схема движителя судна;
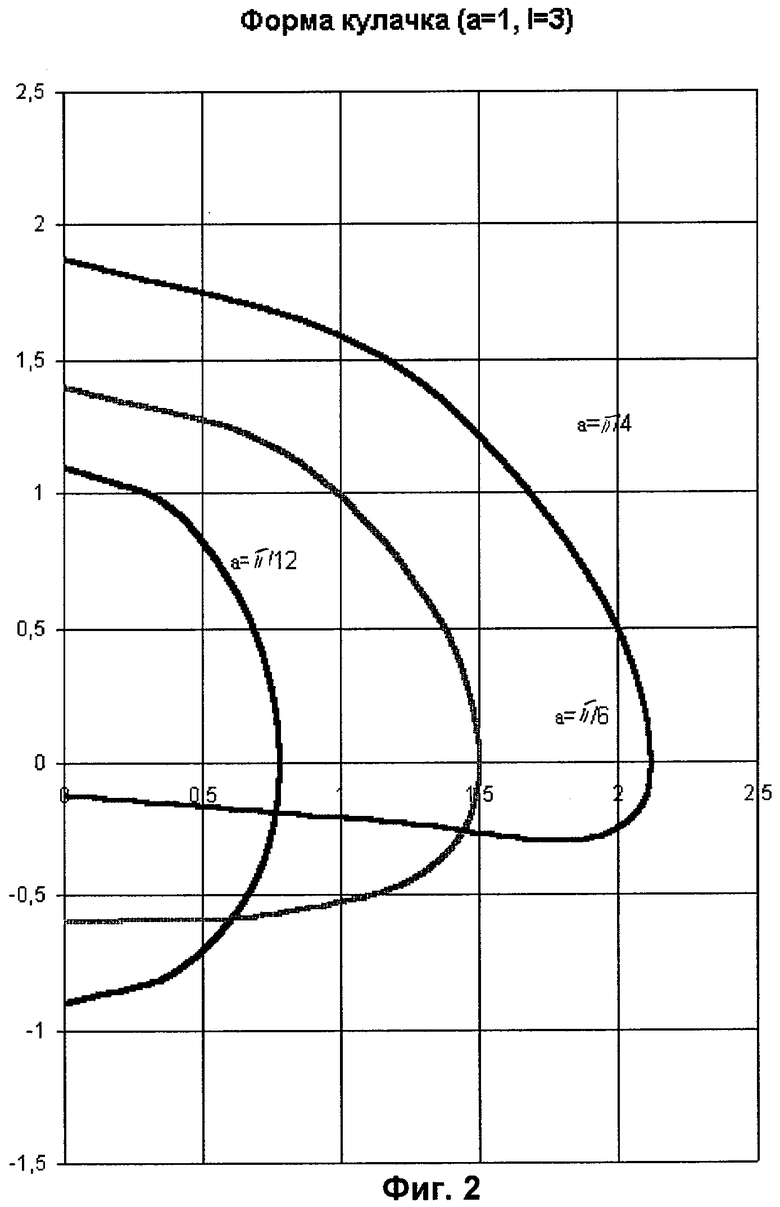
на фиг.2 - формы кулачков при различных амплитудах поворота лопастей;
на фиг.3 - формы кулачков при различных соотношениях длин звеньев кулачково-рычажного механизма;
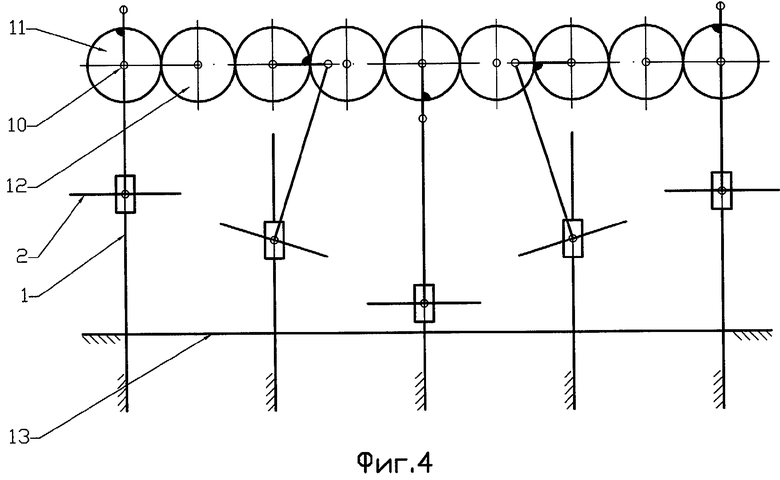
на фиг.4 - принципиальная схема движителя судна с лопастями, расположенными в ряд и имеющими смещение по фазе углов поворота кривошипов (схема привода движителя показана упрощенно).
Волновой движитель судна содержит установленную на раме 1 с ориентацией вдоль оси судна лопасть 2 с приводом поступательной и угловой вибрации в виде кулачково-рычажного механизма, который содержит шарнирно установленную на неподвижной оси кулису 3, образующую поступательную пару с ползуном 4. На ползуне 4 смонтирован ролик 5, который находится во взаимодействии с неподвижным кулачком 6. Форма кулачка 6 описывается уравнениями в виде
х=lsin(α0sint),
у=Acost+l[cos(α0sint)-cosα0],
где A - амплитуда перемещения лопасти; l - длина шатуна, l=(2...6)А; α0 - амплитуда поворота лопасти, α0=π/12...π/6; t - параметр, равный углу поворота кулисы, 0≤t≤2π.
Ползун 4 шарнирно соединен с шатуном 7, который, в свою очередь, также шарнирно - с ползуном 8, смонтированным в направляющей 9. Вал 10, на котором установлена кулиса 3, расположен на продолжении направляющей 9 ползуна 8.
Движитель судна может содержать две или более лопасти 2 с приводом поступательного и углового колебаний, аналогичных первым и расположенные в ряд, при этом направляющие 9 ползунов 8 параллельны друг другу, размеры соответствующих звеньев приводов всех лопастей 2 равны, приводы лопастей 2 состоят в кинематической связи с передаточным отношением равным единице, которая выполнена в виде установленных на валах 10 кулис 3 шестерен 11 с одинаковым числом зубьев, соединенных посредством промежуточных шестерен 12, а угол ϕ взаимного поворота кулис 3 относительно друг друга пропорционален порядковому номеру лопасти 2 в ряду:
где n - порядковый номер лопасти 2 в ряду; N - общее число лопастей 2.
Преимущественно число лопастей 2 в ряду равно от трех до пяти. Параллельно ряду лопастей может быть расположен соединенный с днищем судна экран 13.
Движитель судна работает следующим образом. При вращении кулисы 3 ползун 4, вращаясь вместе с кулисой 3, обкатывает ролик 5 по кулачку 6. При этом шатун 7 сообщает ползуну 8 возвратно-поступательное движение. Лопасть 2 совершает возвратно-поступательное движение вместе с ползуном 8 и возвратно-вращательное движение вместе с шатуном 7. При кулачке 6, имеющем форму, отвечающую приведенным выше уравнениям, вертикальное перемещение лопасти 2 и угол ее поворота будут синусоидальными, а результирующее движение - волнообразным.
Применение в движителе судна двух или более лопастей 2 с приводом поступательного и углового колебаний, аналогичных первым и расположенных в ряд, а также то, что направляющие 9 ползунов 8 параллельны друг другу, размеры соответствующих звеньев приводов всех лопастей 2 равны друг другу, приводы лопастей 2 кинематически связаны с передаточным отношением, равным единице, а углы ϕ взаимного поворота кулис 3 относительно друг друга пропорциональны порядковому номеру лопасти 2 в ряде, позволяет обеспечить каждой лопасти 2 движение по синусоиде, описанной формулой
уA=А·sin(ϕ+τ),
где уA - текущее смещение; А - амплитуда смещения; ϕ - угол взаимного поворота кулис относительно друг друга, τ - угол поворота первой кулисы 3.
При этом лопасти 2, расположенные в ряд, совершают движение со смещением по фазе так, что через них все время можно провести общую синусоиду. То есть в этом случае движение по синусоиде копируется не на отдельном ограниченном, а на протяженном ее участке. Это позволяет получить в движителе судна волнообразное движение по траектории, представляющей собой синусоиду, что позволяет снизить сопротивление движению лопасти 2 волнового движителя судна и повысить его к.п.д.
При трех - пяти лопастях 2 в ряду обеспечивается приблизительное их движение по синусоиде, но при этом механизм не усложняется чрезмерно. Установка на валах 10 кулис 3 шестерен 11, соединенных посредством промежуточных шестерен 12, обеспечивает кинематическую связь приводов лопастей 2 с передаточным отношением, равным единице. Соединенный с днищем судна экран 13, расположенный параллельно ряду лопастей 2, уменьшает при работе движителя судна неэффективное горизонтальное перемещение воды.
Форма кулачка 6, необходимая для движения одной лопасти 2 по синусоиде, определяется из следующих соображений. Установим уравнение движения шатуна 7 в месте присоединения к нему ролика 5.
Направим ось у вдоль направляющей 9, а ось х - перпендикулярно ей вправо. Начало координат совместим со средним положением лопасти 2. Закон движения конца шатуна 7, соединенного с лопастью 2, запишется в виде
xA=0; yA=A cos t,
где А - амплитуда перемещения лопасти 2; t - параметр, равный углу поворота кулисы 3,0≤t≤2π.
Угол поворота лопасти 2 и шатуна 7
α=α0sin t,
где α0 - амплитуда поворота лопасти 2.
Закон движения шатуна 7 в месте присоединения к нему ролика 5 в этом случае будет иметь вид
хB=lsinα=lsin(α0sint);
уB=yA+lcosα=Acost+lcos(α0sint).
где l - длина шатуна, l=(2...6)А;
Этим же законом опишется форма кулачка 6 в координатах с началом в точке А. Для нахождения положения точки С оси кулисы 3 заметим, что лопасть 2 и шатун 7 принимают положение, при котором угол поворота лопасти 2 и шатуна 7 α принимает максимальное значение α=α0 при sint=1, t=π/2. Это означает, что при t=π/2 уc=уB=lcosα0.
Перейдя теперь к новой системе координат с началом координат в точке С имеем описание формы кулачка 2 в виде
x'B=lsinα=lsin(α0sint),
у'B=yA+lcosα0=Acost+lcos(α0sint)-lcosα0,
Опуская индексы и обозначения, переходим к более простому виду
х=lsin(α0sint),
у=Acost+l[cos(α0sint)-cosα0],
где А - амплитуда перемещения лопасти; l - длина шатуна, l=(2...6)А; α0 - амплитуда поворота лопасти 2, α0=π/12...π/6; t - параметр, равный углу поворота кулисы 3,0≤t≤2π.
При α0<π/12 синусоида, описываемая лопастью 2, имеет пологий вид, и мала тяга, развиваемая движителем, при α0>π/6 кулачок принимает вогнутую форму, что снижает к.п.д. движителя. При l<2А синусоида, описываемая лопастью 2, имеет пологий вид и мала тяга, развиваемая движителем, при l>6А кулачок принимает вогнутую форму, что снижает к.п.д. движителя.
Выполнение кулачка 6 по форме, отвечающей вышеприведенным условиям, позволяет сообщать лопасти 2 угловую вибрацию со смещением относительно поступательной по фазе на 90°, т.е. максимальному виброперемещению угловой вибрации лопасти 2 соответствуют нулевое виброперемещение поступательной вибрации, и наоборот. Это позволяет получить движение лопасти 2 волнообразно по синусоиде, что позволяет снизить сопротивление движению в жидкости и повысить тягу движителя.
Использование предлагаемого волнового движителя позволяет повысить тягу движителя за счет придания исполнительному органу движителя судна волнообразного движения с постоянными параметрами.

Изобретение относится к судостроению, касается создания волновых движителей надводных и подводных судов, а также оно может быть использовано в качестве вибрационного конвейера или в качестве наглядного пособия для демонстрации волнового движения. Движитель судна имеет лопасть, соединенную с приводом ее поступательного и углового колебаний, включающим в себя кулису с ползуном, взаимодействующим с неподвижным кулачком и шарнирно соединенным с шатуном. Шатун также шарнирно соединен с ползуном, смонтированным в направляющей. Лопасть жестко соединена с шатуном, а ее плоскость проходит через шарнир, соединяющий шатун с ползуном. Кулачок выполнен в форме, описываемой уравнениями: х=lsin(α0sint), y=Acost+l[cos(α0sint)-cosα0], где A - амплитуда перемещения лопасти; l - длина шатуна, l=(2...6)А; α0 - амплитуда поворота лопасти, α0=π/12...π/6; t - параметр, равный углу поворота кулисы, 0≤t≤2π. Движитель судна может дополнительно содержать две или более (преимущественно три или четыре) лопасти с приводом поступательного и углового колебаний, аналогичные первой и расположенные в ряд. Направляющие ползунов могут быть параллельными друг другу. Размеры соответствующих звеньев приводов всех лопастей могут быть равными. Приводы лопастей могут состоять в кинематической связи с передаточным отношением, равным единице, а углы ϕ взаимного поворота кулис относительно друг друга могут быть пропорциональными порядковому номеру лопасти в ряде. Число лопастей в ряду целесообразно принимать равным трем или четырем. Кинематическую связь целесообразно выполнять в виде установленных на валах кулис шестерен с одинаковым числом зубьев, соединенных промежуточными шестернями. Параллельно ряду лопастей целесообразно располагать экран, соединенный с днищем судна. Технический результат заключается в снижении сопротивления движению лопасти и в повышении к.п.д. движителя. 4 з.п. ф-лы, 4 ил.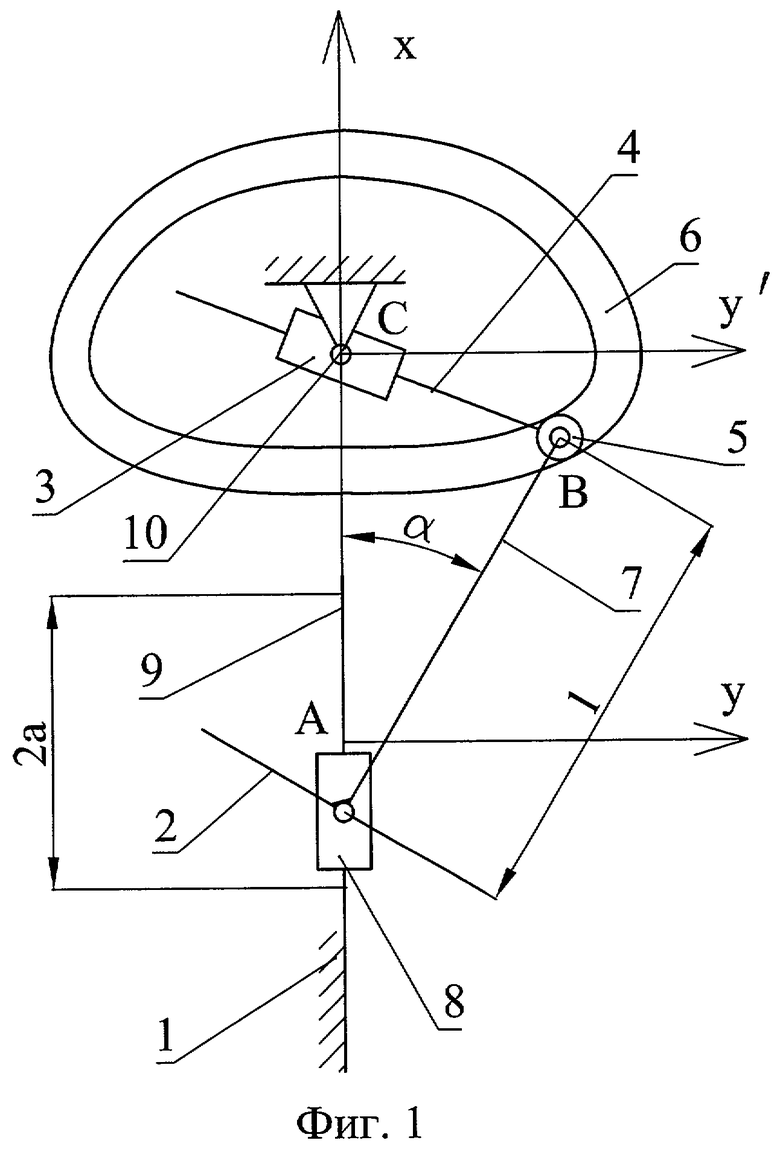
x=lsin(α0sint),
у=Acost+l[cos(α0sint)-cosα0],
где А - амплитуда перемещения лопасти;
l - длина шатуна, l=[2...6)А;
α0 - амплитуда поворота лопасти, α0=π/12...π/6;
t - параметр, равный углу поворота кулисы, 0≤t≤2π.
где n - порядковый номер лопасти в ряду;
N - общее число лопастей.
| Устройство для передачи давления на рабочий орган | 1926 |
|
SU38987A1 |
| Посадочная машина | 1930 |
|
SU26857A1 |
| ДВИЖИТЕЛЬ СУДНА | 1998 |
|
RU2143375C1 |
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2041129C1 |

