Изобретение относится к судостроению, в частности к судовым движителям, использующим энергию волн.
Известны устройства, использующие качку, для передвижения судов с применением поворотных плавников (крыльев), установленных на осях, конструкция которых описана в изобретении СССР №47562, опубликованном в 1936 г.
Недостатком судовых волновых движителей является то, что работа крыльев не эффективна из-за отсутствия, во-первых, взаимосвязи между скоростью судна и амплитудно-частотной характеристикой крыльев и, во-вторых, соотношения между габаритами судна и размерами крыльев.
Для повышения эффективности волновых движителей необходимо, чтобы поверхности их крыльев соответствовали винтовым поверхностям с центром на диаметральной плоскости корпуса судна, а лучше - совпадали с центром тяжести судна. В этом случае крылья волновых движителей будут иметь характеристики, аналогичные лопастям гребных винтов, а корпус судна будет аналогом его ступицы. Повышение эффективности произойдет за счет оптимального обтекания крыльев гидродинамическим потоком, рассчитанным на основе теории гребных винтов и выполненным с учетом амплитудно-частотной характеристикой колебания лопастей.
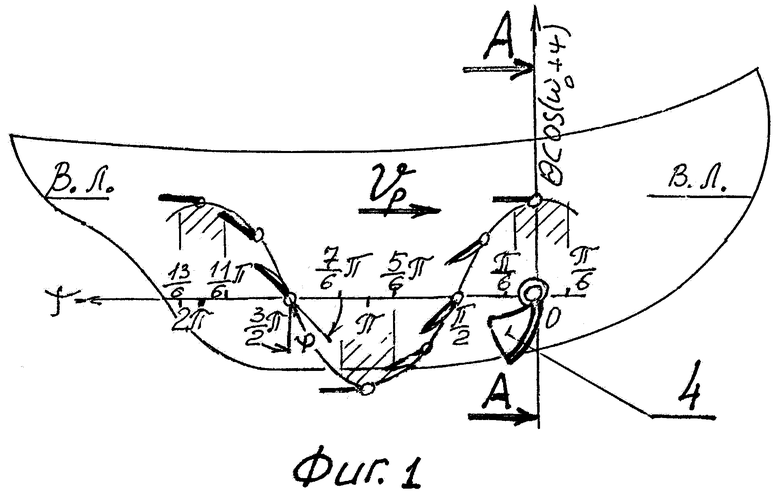
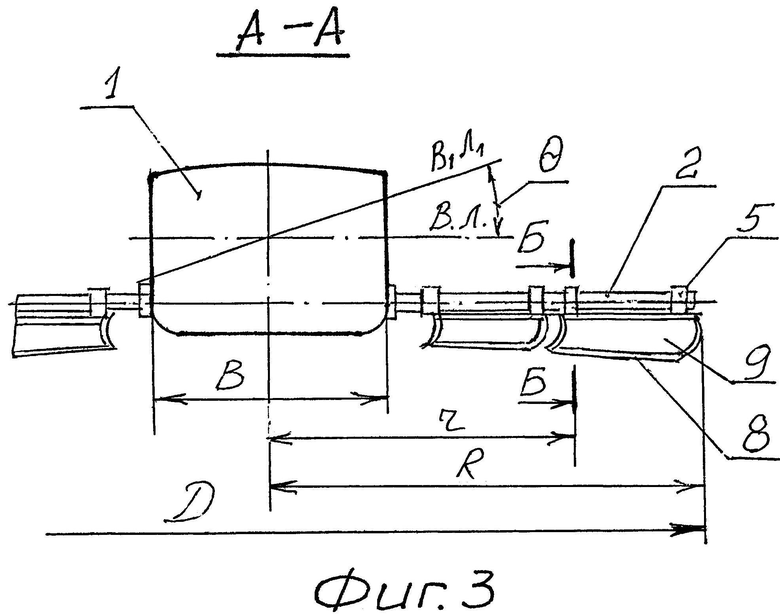
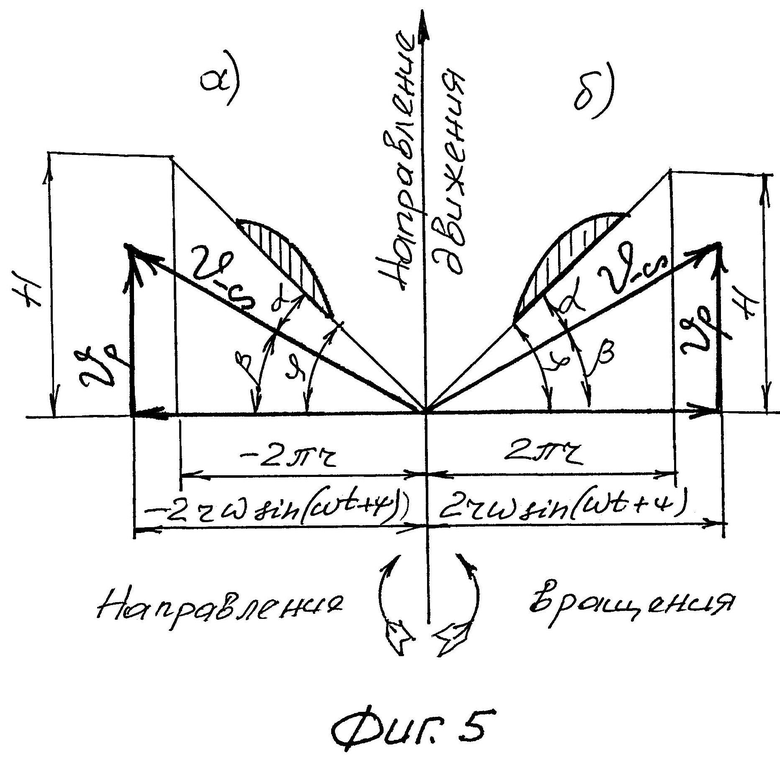
На фиг.1 показан схематично главный вид корпуса судна и перемещение сечения крыла относительно воды при обращенном движении: судно остановлено, а вода движется. На фиг.2 - вид сверху на судно с лопастями, состоящими, например, из двух секций каждая. На фиг.3 - разрез по А-А с обозначением угла крена. На фиг.4 - разрез по Б-Б. На фиг.5,а - обтекание сечения лопасти при фазах колебания ψ от 



На чертежах обозначено:
1 - корпус судна; 2 - полуось; 3 - фланец полуоси; 4 - лопасть; 5 подшипник; 6 - шпилька; 7 - фторопластовое кольцо; 8 - жесткий контур лопасти; 9 - поверхность лопасти.
В - ширина корпуса судна;
ВЛ - прямая ватерлиния;
В1Л1 - наклонная ватерлиния;
в - ширина элемента лопасти;
ℓ - длина элемента лопасти;
r - расстояние до винтовой линии от оси вращения (центра тяжести);
R - наибольший радиус лопастей;
D - диаметр (размах) лопастей;
H - шаг винтовой линии;
hp - поступь волнового движителя; угол качки корпуса судна;
φ - шаговый угол;
θ - угол качки корпуса судна;
ψ - фаза колебания лопасти;
α - угол атаки;
β - угол поступи;
ωo - круговая частота гармонических колебаний бортовой качки;
ε - скорость колебаний бортовой качки;
τo - период колебаний;
Vp - скорость судна.
Судно с волновым движителем имеет корпус 1, к которому фланцами 3 прикреплены две полуоси 2. На полуоси устанавливаются лопасти 4, состоящие из отдельных элементов в виде жестких (стальных) контуров 8 и упругой середины 9, выполненной, например, из вулканизированной резины (см. фиг.2, 3). К контурам приварены втулки 5 с фторопластовыми кольцами 7 (см. фиг.4), выполняющими роль подшипников скольжения на полуосях. В подшипниках имеются пазы, в которых находятся упорные шпильки 6, ввернутые в полуоси так, чтобы элементы лопастей в одном из крайних положений образовали винтообразную поверхность с шаговым углом φ, как у правых гребных винтов, и возможным углом поворота γ=180-2φ в другое положение, образуя винтообразную поверхность, как у левых гребных винтов.
Конструкции ограничителей движения лопастей известны, например, в изобретении СССР №1799812. Недостатком ограничителей являются их габариты, соизмеримые с лопастями, что приводит к дополнительным гидравлическим сопротивлениям. Упорные шпильки не выступают за габариты подшипников и не влияют на величину сопротивлений.
Известно, что корпус судна на волнении совершает гармонические колебания по косинусоиде θ=θocos(ωot+ψ), период которых равен τo=2π/wo, а угловая скорость ε=θoωosin(ωot+ψ)(см. В.А.Лесюков Теория и устройство судов внутреннего плавания. М.: 1982 г., стр.113, строчка 12 снизу), где θo - начальный угол крена.
Колебания корпуса судна передаются лопастям, которые выполнены по винтовым поверхностям и обладают геометрическими характеристиками гребных винтов: шагом H и шаговым углом tgφ=H/4θor.
При качке судна все сечения лопастей по радиусу r участвуют в двух движениях: перемещаются вместе с судном со скоростью Vp относительно воды и колеблются с периодом τo. Траектория одного из сечений, перемещающегося по косинусоиде в зависимости от фазы (от 0 до 2π), показана на фиг.1. Соотношение между скоростью Vp и периодом τo определяет поступь hp и представляет собой перемещение судна за время, соответствующее одному колебанию 
Сечение лопасти, расположенное на винтовой линии радиуса r, перемещается в абсолютном движении со скоростью 



Скорость судна при работе волнового движителя в воде равна 

В результате этого между направлением скорости 
Следовательно, каждое сечение лопасти волнового движителя можно рассматривать как элемент несущего крыла, движущегося с углом атаки α.
В предлагаемой конструкции шаговый угол φ является величиной постоянной для каждого элемента лопасти, а угол поступи β - переменной, функционально зависимой от фазы ψ.
Анализ приведенных выше формул показал, что в интервале фазы ψ от 







В рабочем интервале подъемная сила крыла лопасти через подшипник и упор (см. фиг.4) передается полуоси и корпусу судна. В нерабочем интервале происходят потери на поворот лопастей, величина которых увеличивается при выходе сечения лопасти за границу гармоники, т.е. косинусоиды.
Поэтому ширина лопасти в должна быть ограничена пределами
в=(0,2-0,35)rtgθo.
Учитывая, что при сборке лопастей из отдельных секций происходят дискретные колебания шаговых углов по их длине, что отражается на углах атаки α, поэтому рекомендуется ограничить длину секций ℓпределами ℓ=(0,5-3)в. Как показано на фиг.2, что с увеличением радиуса r растет ширина лопасти в и размах лопастей D, в несколько раз превышающий ширину судна, что позволяет развить достаточный упор для преодоления сопротивления.
В отличии от гребных винтов делать лопасти волновых движителей из твердых материалов (стали, бронзы) не рекомендуется, т.к. после поворота лопасти происходит смена сторон, напорной на засасывающую, что в одной рабочей зоне обеспечивает нормальный упор, а в другой - пониженный. Изготовление секций лопастей с жестким контуром и упругой серединой является более предпочтительным, т.к. в напорной стороне образуется вогнутость, а в засасывающей - выпуклость, что является сегментным профилем крыла, обеспечивающим повышенный упор при любом рабочем движении.
При отсутствии волнения (штиль) волновые движители не работают, поэтому для передвижения судна необходимо его раскачивать, что для малых судов выполнимо силами экипажа, а для больших нужны специальные механизмы, приводящие лопасти в движение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 2013 |
|
RU2542677C1 |
| СУДНО НА ДИСКО-КРЫЛЬЯХ | 2008 |
|
RU2371347C1 |
| ВРАЩАЮЩИЙСЯ КОНТРВИНТ | 2005 |
|
RU2291812C1 |
| СУДОВОЙ ДВИЖИТЕЛЬ | 2001 |
|
RU2182098C1 |
| ВРАЩАЮЩИЙСЯ КОНТРВИНТ | 2001 |
|
RU2212355C2 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| ГРЕБНОЙ ВИНТ | 1992 |
|
RU2043262C1 |
| КАЧЕХОД И КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2392177C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ СУДНА | 1991 |
|
RU2031054C1 |
| ВОЛНОВОЙ ДВИГАТЕЛЬ-ДВИЖИТЕЛЬ | 1998 |
|
RU2143377C1 |

Изобретение относится к области судостроения, в частности к судовым движителям, использующим энергию волн. Судовой волновой движитель состоит из прикрепленных к корпусу полуосей и установленных на них в подшипниках поворотных крылообразных лопастей. Лопасти совершают движения вверх-вниз вместе с корпусом и состоят из отдельных элементов. Поворот лопастей ограничивается упорами на полуосях. При отклонении правого борта вверх из поворотных элементов лопастей образуется винтообразная поверхность с шаговым углом φ, как у лопасти правого гребного винта. При движении правого борта вниз образуется винтообразная поверхность, как у лопасти левого гребного винта. Достигается повышение эффективности волнового движителя. 3 з. п. ф-лы, 5 ил.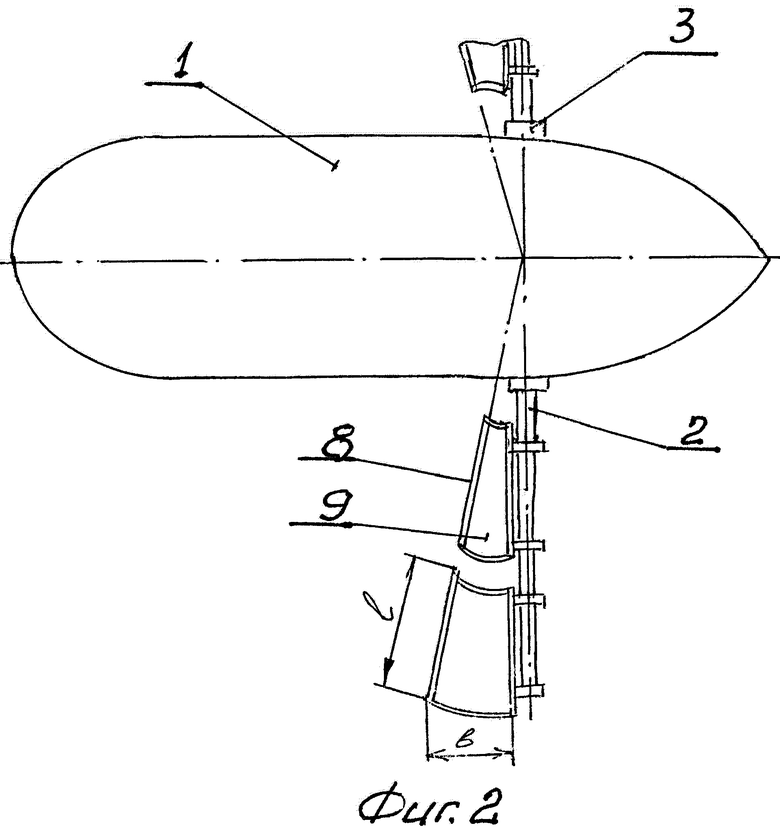
1. Судовой волновой движитель, предназначенный для использования бортовой качки корпуса на волнении для передвижения судна, состоящий из прикрепленных к корпусу полуосей, на которых установлены в подшипниках поворотные крылообразные лопасти, совершающие движения вверх-вниз вместе с корпусом и отличающиеся тем, что лопасти состоят из отдельных элементов, поворот которых ограничивается упорами на полуосях так, чтобы при отклонении правого борта вверх из поворотных элементов образовалась винтообразная поверхность с шаговым углом φ, как у лопасти правого гребного винта, а при движении вниз - винтообразная поверхность, как у лопасти левого гребного винта.
2. Волновой движитель по п.1, отличающийся тем, что упор каждой секции состоит из шпильки, ввернутой в полуось, и ограничивающего паза втулки подшипника, величина которого позволяет секции поворачиваться на угол γ=180-2φ, соответствующий положениям правой или левой лопастей.
3. Волновой движитель по п.1, отличающийся тем, что для поворота лопасти с минимальными гидравлическими потерями необходимо, чтобы ширина элемента лопасти была в пределах в=(0,2-0,35)rtgθo, а длина ℓ- в пределах ℓ=(0,5-3)в,
где r - радиус до сечения лопасти,
θo - начальный угол крена корпуса судна.
4. Волновой движитель по п.1, отличающийся тем, что каждый элемент лопасти имеет жесткий контур по периметру, изготовленный, например, из стальной проволоки, и упругую середину, выполненную из эластичного материала, деформирующегося от давления с напорной стороны так, чтобы в сечении получился сегментный профиль, увеличивающий силу упора.
| Устройство для использования качки на волнении для передвижения судна | 1935 |
|
SU47562A1 |
| KR 1020060034060 A, 21.04.2006 | |||
| JP 10059289 A, 03.03.1998 | |||
| RU 2000997 C1, 15.10.1993 | |||
| ВОЛНОХОД | 1992 |
|
RU2021948C1 |

