Изобретение относится к медицине, а именно к спинальной нейрохирургии, и представляет собой способ регистрации пациента с его персонифицированной моделью в ПО хирургической навигационной системы «Автоплан» при помощи рентгеновских изображений с использованием калибрующего устройства.
Изобретение позволяет провести регистрацию пациента с персонифицированной 3D-моделью, построенной по исследованию DICOM, в программном обеспечении хирургической навигационной системы и осуществлять навигацию хирургического инструмента как по рентгеновскому изображению, данным DICOM, так и по построенным трехмерным персонифицированным моделям.
Известен способ регистрации пациента по совмещению точек на DICOM изображениях и/или персонифицированной 3D-модели с теми же точками на костных структурах пациента, фиксируемыми путем касания необходимых точек хирургическим навигационным инструментом.
Известен способ регистрации пациента по совмещению точек на DICOM изображениях и/или персонифицированной 3D-модели с теми же точками на костных структурах пациента, фиксируемыми с помощью активного инструмента - лазера.
Недостатками данных способов являются:
- необходимость обеспечения доступа к костным структурам пациента, что увеличивает инвазивность оперативного вмешательства;
- необходимость разметки ключевых точек как на DICOM изображениях и/или персонифицированной 3D-модели, так и на соответствующих структурах пациента, что увеличивает время оперативного вмешательств и усложнение работы хирурга.
Техническим результатом изобретения является бесконтактная регистрация пациента по интраоперационным рентгеновским изображениям.
Этот результат достигается тем, что интраоперационно делаются два изображения на электронно-оптическом преобразователе (ЭОП) интересующего отдела позвоночника: в боковой и фронтальной плоскостях. В области снимка располагается специализированное устройство - калибратор - с расположенной на нем системой сфер, которая детектируется оптическим блоком навигационной системы. В ПО навигационной системы загружаются предоперационные исследования DICOM пациента и интраоперационные рентгеновские изображения, которые соотносятся друг с другом, за счет чего происходит регистрация пациента и становится возможной дальнейшая работа с навигационной системой.
Способ осуществляется следующим образом.
Выполняют функциональное исследование пациента, загружают в ПО навигационной системы. Выполняют рентгеновское исследование в двух проекциях необходимого отдела позвоночника с калибратором, расположенным на поверхности тела пациента. Загружают интраоперационные исследования в ПО навигационной системы.
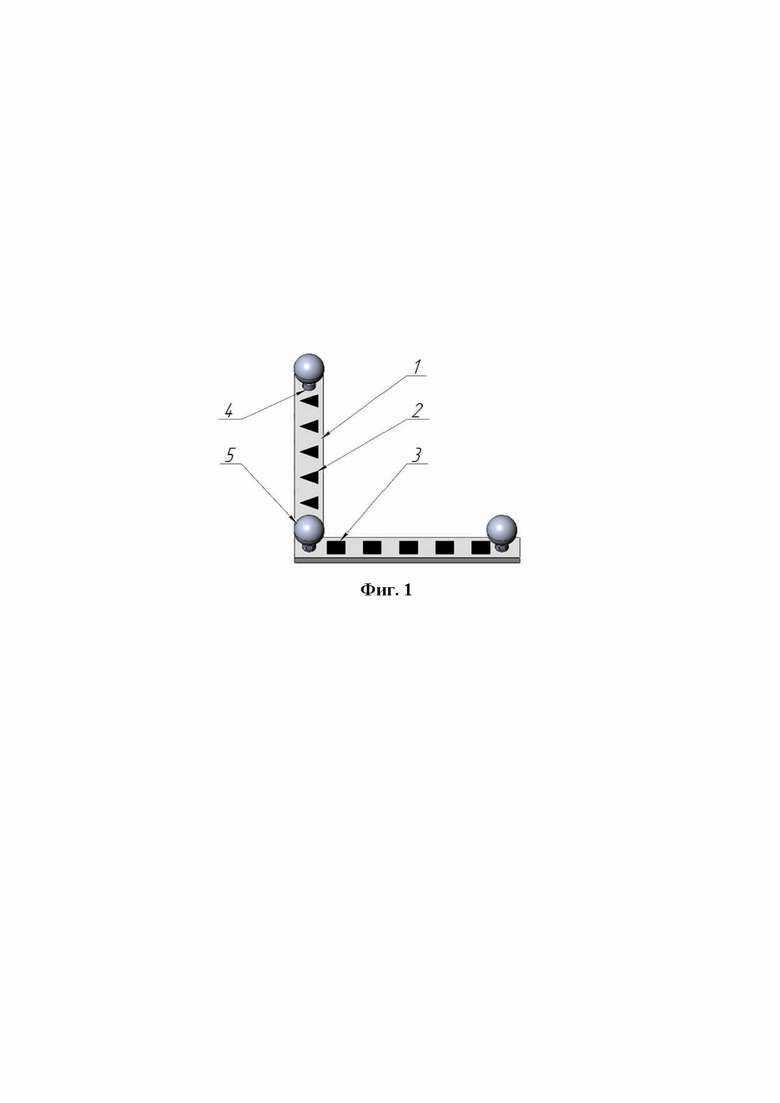
Конструкция калибратора C-дуги поясняется графическим материалом (фиг. 1), где обозначено: 1 - площадка калибратора, 2 - рентген-контрастные треугольные метки, 3 - рентген-контрастные квадратные метки; 4 - шпилька, 5 - сферы.
Площадка калибратора (1) имеет Г-образную форму и выполнена из рентген-прозрачного материала. На одной стороне площадки нанесены рентген-контрастные треугольные метки (2), в которых треугольники являются равнобедренными, на перпендикулярной стороне - рентген-контрастные квадратные метки (3). На площадке калибратора (1) расположены шпильки (4), на которые крепятся сферы (5), расположенные на заданном расстоянии друг от друга, формирующие уникальную конфигурацию системы сфер, детектируемые ПО навигационной системы.
Программный алгоритм регистрации работает следующим образом.
На загруженных рентгеновских изображениях алгоритм осуществляет поиск фигур с контрастными контурами.
Далее алгоритм отфильтровывает фигуры с количеством углов менее 3 и более 6, поскольку они не могут являться искаженными рентген контрастным треугольными и квадратными метками (2, 3).
Далее алгоритм разбивает фигуры на два типа: треугольники и четырехугольники. Осуществляется фильтрация треугольников по критерию принадлежности к равнобедренным. Осуществляется фильтрация четырехугольников по критерию принадлежности к квадратам.
Из полученных равнобедренных треугольников и квадратов осуществляется поиск фигур одного типа, стоящих на одной прямой (не менее двух фигур). Отсеиваются фигуры неодинаковых размеров. Программно рассчитывается коэффициент масштабирования рентген контрастных меток (2, 3) изображения путем сопоставления реальных линейных размеров меток (2, 3) с линейными размерами найденных на изображении фигур. Пересечение двух линий, на которых стоят фигуры (2, 3) является координатой расположений центральной сферы. С учетом заданной конфигурации системы сфер и рассчитанного коэффициента масштабирования находятся положения двух боковых сфер, что дает пространственную ориентацию калибратора. В то время как детекция стереокамерой «Автоплана» расположения системы сфер дает привязку координат данной системы сфер к базисной.
На рентгеновских снимках алгоритмически находятся контуры позвонков.
Для сагиттальной и коронарной проекций КТ генерируются изображения на основе сложения срезов DICOM - псевдорентгеновские изображения. Осуществляется поиск контуров позвонков на псевдорентгеновских изображениях.
Сопоставляются найденные контуры на интраоперационных и на псевдорентгеновских изображениях. При совпадении контуров персонифицированная 3D-модель пациента считается зарегистрированной.
Способ иллюстрируется клиническим примером.
Пациент М., 45 лет с диагнозом: новообразование (гемангиома) в теле L5 позвонка.
Показания к удалению гемангиомы с проведением вертебропластики позвонка L5 с транспедикулярным доступом под контролем хирургической навигационной системы «Автоплан» обусловлены клиническими показаниями (болевой синдром) и угрозой патологического перелома. В предоперационном периоде пациенту была выполнена компьютерная томография (КТ) зоны интереса. Результаты были загружены в ПО «Автоплан», построена персонифицированная модель позвоночника. На 3D-модели было выполнено планирование траектории введения инструмента в тело позвонка. В операционном периоде был выполнен хирургический доступ в подвздошной кости для установки базисной системы сфер (базиса) «Автоплана». Базис установлен неподвижно, в фиксированном положении. Предварительная усадка системы сфер на инструмент - в зоне детекции стереокамеры АПК «Автоплан» для корректного отслеживания базиса в течение всего операционного периода.
В операционной выполнено рентгенологическое исследование поясничного отдела позвоночника с калибрующим устройством, находящимся на поверхности тела пациента. Площадка калибратора выполнена из акрила, являющегося рентген-прозрачным материалом; рентген-контрастные метки выполнены из порошка нержавеющей стали.
Полученные интраоперационные рентгеновские изображения (во фронтальной и боковой плоскостях) были загружены в ПО «Автоплана» и автоматически проведена регистрация по предложенному алгоритму (вместе с предзагруженным КТ). После удаления ЭОПа (С-дуги) из операционного поля навигация выполнялась в режиме реального времени. Под контролем хирургической навигации была выполнена операция по вертебропластике с введением композитного материал на основе полиметилметакрилата при помощи специальной иглы, с учетом корректировки нужного направления и угла введения по виртуальному отображению в системе хирургической навигации на совмещенных рентгенографических снимках.
Проведено контрольное КТ-сканирование после операции.
На послеоперационных КТ-снимках выявили тотальное заполнение костным цементом опухолевого дефекта позвонка, миграции полиметилметакрилата не было. Пациентку выписали на 2-е сутки после хирургического вмешательства. КТ-контроль осуществляли через 6 и 12 месяцев, при этом было подтверждено отсутствие рецидива опухоли.
Особенность оперативного вмешательства с использованием интрапоперационной рентгенографии совместно с системой хирургической навигации в том, что при показаниях подобного рода нет необходимости выполнять открытую операцию, а наоборот - рекомендовано прибегнуть к малоинвазивному доступу для улучшения состояния пациента в постоперационном периоде.
Алгоритм может применяться в спинальных нейрохирургических операциях, требующих рентгенологического контроля, для неинвазивной регистрации пациента в хирургической навигационной системе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплект инструментов для нейрохирургии позвоночника для применения с системой хирургической навигации | 2023 |
|
RU2823108C1 |
| Комплект инструментов для хирургии для применения с системой хирургической навигации | 2023 |
|
RU2823110C1 |
| Способ топической диагностики и визуализации аденом околощитовидных желез при вторичном и третичном гиперпаратиреозе | 2018 |
|
RU2683743C1 |
| Способ подготовки и выполнения хирургической операции на органах малого таза | 2020 |
|
RU2736800C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ АДЕНОМ ОКОЛОЩИТОВИДНЫХ ЖЕЛЕЗ ПРИ ПЕРВИЧНОМ ГИПЕРПАРАТИРЕОЗЕ | 2018 |
|
RU2688804C1 |
| СПОСОБ УСТАНОВКИ ВИНТОВ ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ СТАБИЛИЗАЦИИ ПОЗВОНОЧНИКА | 2015 |
|
RU2620355C1 |
| Способ хирургического лечения идиопатического сколиоза позвоночника с использованием 3D прототипирования модели позвоночника для введения транспедикулярных винтов | 2024 |
|
RU2828969C1 |
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| Способ определения границ резекции при лечении остеосаркомы | 2017 |
|
RU2677064C1 |
| Навигационный комплекс для интраоперационного ориентирования при установке винтовых систем транспедикулярной фиксации в целевые позвонки | 2021 |
|
RU2770666C1 |
Группа изобретений относится к медицине, а именно к спинальной нейрохирургии, и представляет собой способ регистрации пациента с его персонифицированной моделью в ПО хирургической навигационной системы «Автоплан» при помощи рентгеновских изображений с использованием калибрующего устройства. Предложен способ, в котором интраоперационно делаются два изображения на электронно-оптическом преобразователе (ЭОП) интересующего отдела позвоночника. В области снимка располагается калибратор с расположенной на нем системой сфер, которая детектируется оптическим блоком навигационной системы. В ПО навигационной системы загружаются предоперационные исследования DICOM пациента и интраоперационные рентгеновские изображения, которые соотносятся друг с другом, за счет чего происходит регистрация пациента и становится возможной дальнейшая работа с навигационной системой. Группа изобретений позволяет провести регистрацию пациента с персонифицированной 3D-моделью, построенной по исследованию DICOM, в программном обеспечении отечественной хирургической навигационной системы и осуществлять навигацию хирургического инструмента как по рентгеновскому изображению, данным DICOM, так и по построенным трехмерным персонифицированным моделям. 2 н.п. ф-лы, 1 ил., 1 пр.
1. Способ регистрации пациента с его персонифицированной моделью, построенной по исследованию DICOM, в ПО хирургической навигационной системы «Автоплан» с использованием калибратора C-дуги по п. 2, заключающийся в том, что интраоперационно получают два рентгеновских изображения на электронно-оптическом преобразователе (ЭОП) интересующего отдела позвоночника в боковой и фронтальной плоскостях с использованием калибратора C-дуги, расположенного на поверхности тела пациента в области снимка; в ПО навигационной системы загружают предоперационные исследования DICOM пациента и интраоперационные рентгеновские изображения; алгоритмически на загруженных рентгеновских изображениях осуществляют поиск фигур, соответствующих треугольным и квадратным меткам калибратора и определяют пространственную ориентацию калибратора; алгоритмически генерируют псевдорентгеновские изображения на основе сложения срезов DICOM; определяют и сопоставляют контуры позвонков на интраоперационных и на псевдорентгеновских изображениях.
2. Калибратор C-дуги для бесконтактной регистрации пациента в ПО хирургической навигационной системы «Автоплан», содержащий площадку Г-образной формы, выполненную из рентген-прозрачного материала, на одной половине которой нанесены рентген-контрастные треугольные метки, в которых треугольники являются равнобедренными, а на перпендикулярной стороне нанесены рентген-контрастные квадратные метки; шпильки, расположенные на площадке, на которые крепятся навигационные сферы, расположенные на заданном расстоянии друг от друга, детектируемые ПО навигационной системы.
| CN 107468350 A, 15.12.2017 | |||
| СПОСОБ КАЛИБРОВКИ ЦИФРОВОГО РЕНТГЕНОВСКОГО АППАРАТА (ВАРИАНТЫ) | 2007 |
|
RU2359614C1 |
| US 2020034969 A1, 30.01.2020 | |||
| US 2021153851 A1, 27.05.2021. | |||

