ПРИОРИТЕТ
Настоящая заявка испрашивает приоритет по предварительной патентной заявке США №62/254737, поданной 13 ноября 2015 г., и предварительной патентной заявке США №62/349,981, поданной 14 июня 2016 г. Содержание каждой из указанных заявок включено во всей полноте в настоящую заявку путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
Раскрытые в настоящем описании варианты реализации относятся к системам и способам определения относительного состояния здоровья и пола суточного цыпленка. Что касается нездоровых цыплят, после обнаружения каких-либо заболевания или травмы их отделяют от поголовья. После определения пола цыплят разделяют по половому признаку.
УРОВЕНЬ ТЕХНИКИ
В современной среде массового производства обрабатывают по существу три категории птицы: бройлеров, племенную птицу и несушек. Бройлеров выращивают и забивают по достижении зрелости для потребления человеком. Племенных птиц выращивают с целью разведения бройлеров или несушек, а несушек выращивают с целью получения яиц для потребления человеком и животными. В каждом из указанных случаев после вылупления цыплят их быстро обрабатывают и переводят на следующий этап выращивания. Суточные цыплята подвержены высокому риску заболеваний и инфекций. Вследствие тесных условий, в которых вылупляются и живут цыплята, любой цыпленок, родившийся с аномалией или заболеванием, может потенциально инфицировать множество других цыплят в окружающей среде. Соответственно, для обеспечения здоровья всего поголовья крайне важно удалять любых больных или цыплят с пороками развития, способных вызывать заражение других цыплят. Кроме того, удаление любых серьезно больных цыплят для последующего гуманного усыпления и утилизации, не дожидаясь нанесения ими дополнительного вреда самим себе, является проявлением милосердия.
Суточных цыплят-бройлеров быстро обрабатывают в инкубаториях и незамедлительно транспортируют в помещения для выращивания, в которых они живут и растут до достижения веса, требуемого для потребления.
Существует два распространенных расстройства, поражающие некоторых цыплят. Первое из указанных расстройств представляет собой отсутствия срастания стенки боковой полости после втягивания желточного мешка. В подобном случае цыпленок вылупляется с открытой брюшной полостью. Указанное расстройство обычно смертельно. При отсутствии своевременного обнаружения указанного расстройства в открытой ране возникают колонии вредных бактерий и инфекционное заражение указанного участка тела, ведущие к смерти цыпленка.
Второе расстройство представляет собой деформированную или неполноценную ногу или стопу, или деформированный клюв или глаз. Цыплята с деформированными ногами и стопами не в состоянии выдерживать тяготы промышленного птицеводства, а также получать достаточное количество корма и воды в помещениях для выращивания, и следовательно, никогда не проявляют темпы роста, сходные с таковыми у здоровых цыплят. Таким образом, необходимо незамедлительное удаление больных цыплят.
Таким образом, существует необходимость в быстром и эффективном осмотре суточных цыплят с целью определения наличия или отсутствия уровня физического здоровья, достаточного для выдерживания тягот промышленного птицеводства. Кроме того, существует необходимость в быстром и эффективном обнаружении любых физических аномалий у суточных цыплят с целью обеспечения возможности удаления цыплят с указанными аномалиями из здорового поголовья.
Раннее определение пола цыпленка также представляет важность в области птицеводства для осуществления максимально раннего разделения цыплят по половому признаку с целью обеспечения эффективного расходования соответствующих ресурсов. Самцы-"несушки" ценности не представляют; сходным образом, необходимо лишь ограниченное число племенных самцов. Самцы-бройлеры менее желательны по сравнению с самками. Сравнительно низкий коэффициент кормоотдачи (отношение между стоимостью корма и набранным весом) является основным двигателем указанной нежелательности самцов-бройлеров.
Определение пола суточного цыпленка вошло в широкую птицеводческую практику в первых годах 20 века. В течение многих лет для разделения цыплят на самцов и самок в промышленном птицеводстве использовали ручное определение пола клоачным и перьевым методами. Оба указанных способа считают неблагоприятными для цыплят вследствие ручной обработки цыплят и их использование приводит к повышению недельной смертности разделенных по полу цыплят.
Известно, что пол суточного цыпленка может быть определен по перьям крыла цыпленка. Рисунок перьев и их длина на сгибе крыла варьируются у самцов и самок суточных цыплят. Однако существующий способ ручного принудительного расправления крыльев цыпленка повышает заболеваемость цыпленка и вероятность получения им травм. Кроме того, ручные методики являются трудоемкими и повышают вероятность получения персоналом травм, связанных с повторяющейся нагрузкой.
Таким образом, существует необходимость в обеспечении быстрого и автоматического осмотра суточных цыплят с целью определения их пола и последующего разделения цыплят по половому признаку.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Раскрытые в настоящем описании варианты реализации содержат систему, содержащую устройство для позиционирования цыпленка на движущейся платформе и устройство захвата изображения для захвата по меньшей мере одного электронного изображения цыпленка на движущейся платформе. Система также содержит базу данных, содержащую электронные изображения здоровых и больных цыплят породы указанного цыпленка, и процессор обработки изображений, связанный с устройством захвата изображения и с базой данных. После отправления захваченного изображения цыпленка в процессор обработки изображений, изображение сравнивают с базой данных изображений цыплят, и в случае наличия отклонений на изображении цыпленка от изображений здоровых цыплят в базе данных, или в случае наличия соответствия изображениям больных цыплят или наличия любых аномалий, цыпленка отделяют от поголовья.
Устройство позиционирования может представлять собой конвейер. Полученное изображение цыпленка может представлять собой изображение вида спереди. Полученное изображение цыпленка может представлять собой изображение туловища цыпленка. Полученное изображение цыпленка может представлять собой изображение ног, лицевой части и стоп цыпленка.
Раскрытые в настоящем описании варианты реализации также содержат способ определения состояния здоровья суточного цыпленка, включающий этапы позиционирования цыпленка на движущейся платформе и захвата по меньшей мере одного электронного изображения цыпленка на движущейся платформе. Способ также включает обеспечение базы данных, содержащей электронные изображения здоровых цыплят породы указанного цыпленка, и обеспечение процессора обработки изображений, связанного с устройством захвата изображения и с базой данных. Способ также включает сравнение захваченного изображения с электронными изображениями в базе данных и определение наличия или отсутствия отклонения захваченного изображения от изображений в базе данных.
Раскрытые в настоящем описании варианты реализации также содержат систему, содержащую устройство для обеспечения расправления крыльев цыпленком и устройство захвата изображения для получения по меньшей мере одного электронного изображения крыльев цыпленка в расправленном виде. Система также содержит базу данных, содержащую электронные изображения рисунков крыльев самцов и самок цыплят породы указанного цыпленка, и процессор обработки изображений, связанный с устройством захвата изображения и с базой данных. После отправления захваченного изображения цыпленка в процессор обработки изображений, указанное изображение сравнивают с базой данных рисунков крыльев цыплят указанной породы с целью определения пола цыпленка.
Устройство для обеспечения расправления крыльев цыпленком предпочтительно представляет собой наклонный конвейер или шарнирную платформу. Устройство захвата изображения может представлять собой цифровую камеру. Полученное изображение цыпленка может представлять собой изображение вида спереди.
В настоящих вариантах реализации также описан способ определения пола цыпленка, включающий этапы обеспечения движущейся платформы для обеспечения опоры для цыпленка, обеспечения по меньшей мере одного стимула для обеспечения расправления крыльев цыпленком и получения по меньшей мере одного изображения цыпленка в момент расправления цыпленком крыльев. Способ также включает обеспечение базы данных, содержащей библиотеку цифровых изображений, и обеспечение компьютерного процессора, связанного с устройством захвата изображения и с базой данных. После расправления цыпленком крыльев получают изображение указанных крыльев. Изображение крыла цыпленка сравнивают с изображениями из библиотеки цифровых изображений с целью определения пола цыпленка.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие задачи, признаки и преимущества вариантов реализации будут очевидны специалисту при рассмотрении нижеследующего подробного описания, приведенного со ссылкой на сопутствующие чертежи, на которых:
На фиг. 1 показан вид в перспективе части первого варианта реализации;
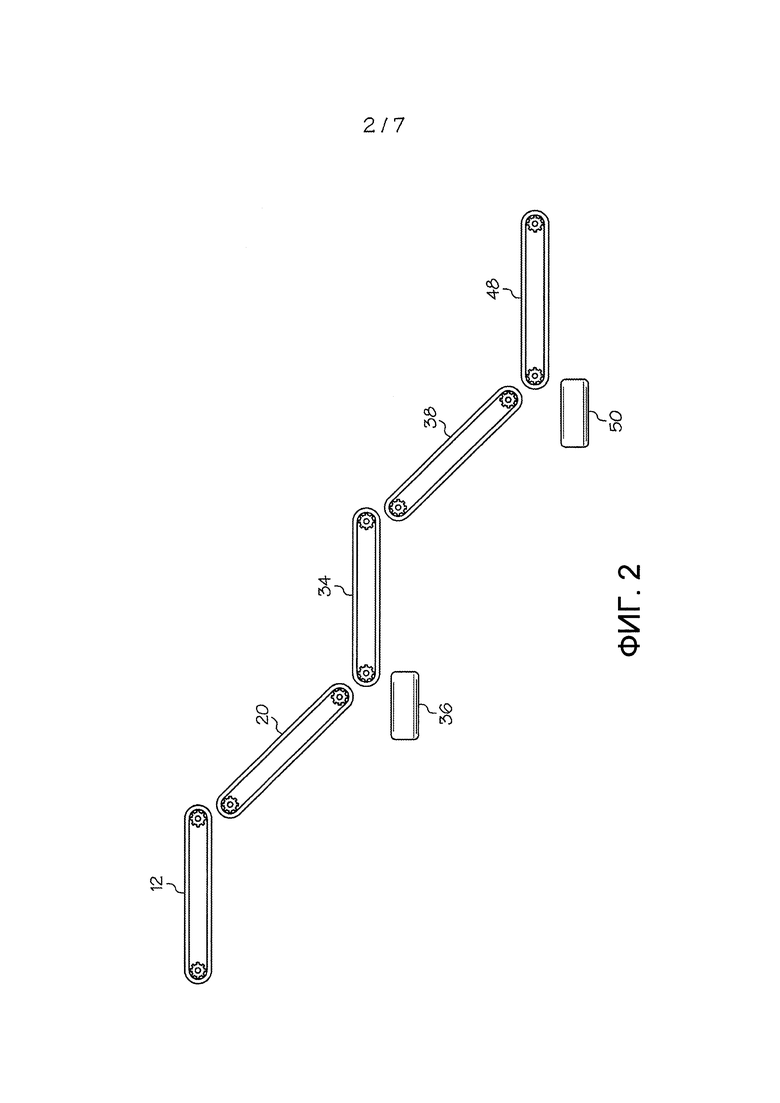
На фиг. 2 показан схематичный вид сбоку первого варианта реализации;
На фиг. 3 показан увеличенный вид в перспективе первого наклонного конвейера первого варианта реализации;
На фиг. 4 показан увеличенный схематичный вид сбоку части первого варианта реализации по фиг. 2;
На фиг. 5 показана диаграмма привода первого варианта реализации в выдвинутом и отведенном положениях;
На фиг. 6 показан увеличенный вид в перспективе второго наклонного конвейера первого варианта реализации;
На фиг. 7 приведено схематичное отображение связи различных элементов первого варианта реализации; и
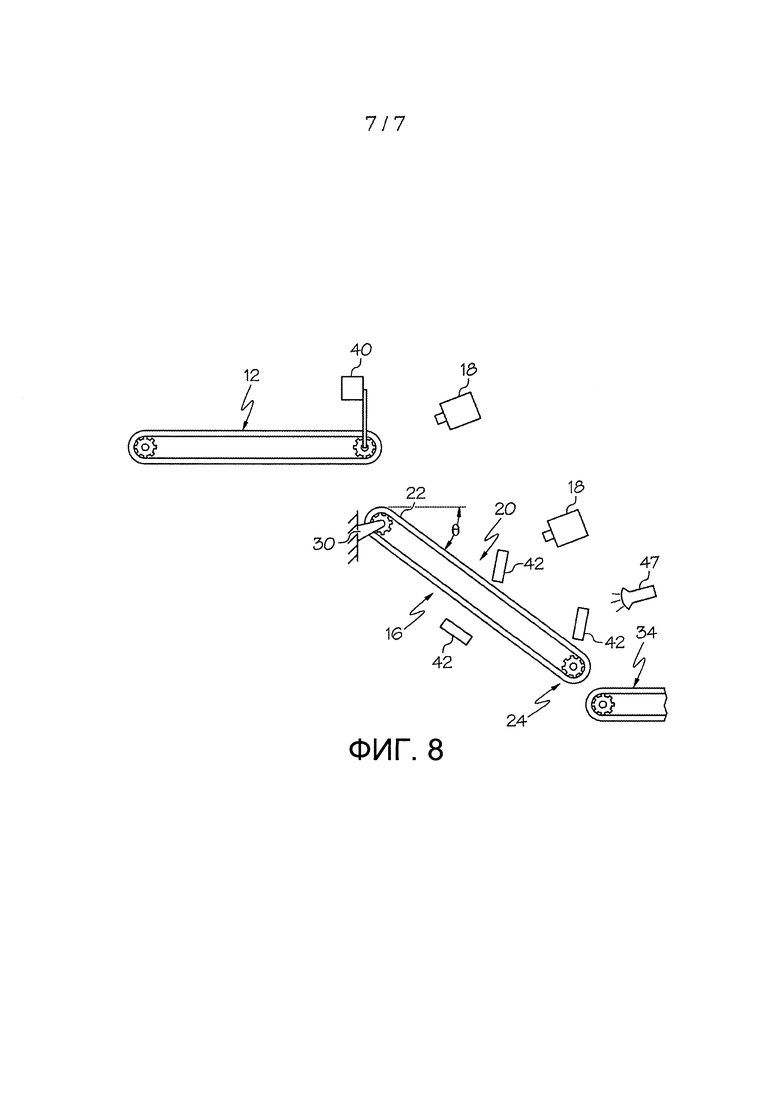
На фиг. 8 показан схематичный вид сбоку первого варианта реализации по фиг. 6.
Раскрытые в настоящем описании варианты реализации не призваны ограничивать настоящее изобретение. Варианты реализации призваны охватывать все альтернативные решения, модификации, и эквиваленты, согласно настоящему описанию.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Раскрытые в настоящем описании варианты реализации относятся к системам и способам определения относительного состояния здоровья и пола цыпленка. Показанный на фиг. 1 первый вариант 10 реализации содержит первый конвейер 12, перемещающий цыплят 14 в инкубатории. Следует понимать, что цыплята 14 ранее были разделены посредством других конвейеров и разделителей и перемещаются по первому конвейеру 12 в рядах "по одному". Первый конвейер 12 содержит датчик 16 присутствия для обнаружения присутствия цыпленка 14 на первом конвейере. Вдоль пути первого конвейера 12 расположена одна или несколько камер 18. Предпочтительно, камеры 18 расположены на конце конвейера на уровне тела цыпленка 14 с целью обеспечения возможности фокусировки на животе, ногах и стопах цыпленка. Кроме того, камеры 18 могут быть установлены над первым конвейером 12 с целью обеспечения возможности фокусировки на цыпленке, но без вмешательства в перемещение цыпленка по первому конвейеру. Под термином "конвейер" следует понимать манипуляционный механизм любого вида, выполненный с возможностью транспортировки объекта, в данном случае - животного, из первого местоположения во второе местоположение. Термин "конвейер" без ограничения включает конвейерные ленты, движущиеся платформы и т.п.
Камеры 18 предпочтительно представляют собой видеокамеры, выполненные с возможностью получения видеоизображения каждого из цыплят 14 по мере его перемещения по первому конвейеру 12 в реальном времени. Камеры 18 связаны с главным системным контроллером 44 и компьютерным процессором 32 (фиг. 7). Компьютерный процессор 32 содержит базу данных изображений здоровых и больных цыплят 14. Компьютерный процессор 32 выполнен с возможностью приема и обработки изображений от камер 18 и определения наличия или отсутствия у цыплят любых признаков аномалий или нарушений, требующих дальнейшего изучения. Подробности указанного процесса раскрыты в нижеприведенном описании.
Как показано на фиг. 2, наклонный конвейер 20 размещен в непосредственной близости от первого конвейера 12 и ниже него. Первый наклонный конвейер 20 расположен под углом θ относительно горизонтальной плоскости.
Первый наклонный конвейер 20 содержит ближний конец 22 и дальний конец 24. Наклонный конвейер 20 содержит рамку 26 для обеспечения опоры для наклонного конвейера (фиг. 4). Рамка 26 наклонного конвейера 20 с возможностью поворота соединена на ближнем конце 22 с закрепленной конструкцией, такой как рамочная конструкция общей системы. Рамка 26 обеспечивает опору для пары рельс 28, предотвращающих падение цыпленка с наклонного конвейера 20.
Привод 30 по фиг. 3-5 закреплен с соединением с рамкой 26 наклонного конвейера 20, а также с опорной конструкцией, такой как рамочная конструкция общей системы. Привод 30 в обычном положении расположен таким образом, что он обеспечивает опору для наклонного конвейера 20 в выдвинутом положении. При активизации привод 30 отводят, что приводит к повороту рамки 26 наклонного конвейера вокруг ближнего конца 22 конвейера 20 и к дальнейшему перемещению дальнего конца 24 книзу с сопутствующим увеличением значения угла θ. Привод 20 связан с компьютерным процессором 32, удаленно управляющим указанным приводом.
Согласно фиг. 2, третий конвейер 34 расположен ниже наклонного конвейера 20 и размещен с возможностью приема цыплят 14 с конвейера 20, когда наклонный конвейер находится в выдвинутом положении. Четвертый конвейер 36 расположен еще ниже наклонного конвейера 20 и ориентирован перпендикулярно относительно наклонного конвейера 20 в задвинутом положении. Четвертый конвейер 36 принимает цыплят 14 с наклонного конвейера 20, когда он отведен посредством привода 30, согласно нижеприведенному более подробному описанию.
Второй наклонный конвейер 38 по фиг. 2 и 6 расположен непосредственно ниже третьего конвейера 34 с целью приема цыплят 14 с указанного конвейера 34. Второй датчик 40 присутствия расположен на конце третьего конвейера 34. Второй датчик 40 присутствия обнаруживает присутствие цыпленка 14 на пути второго наклонного конвейера 38.
Камеры 18 расположены на конце третьего конвейера 34 и в одной или нескольких точках вдоль пути второго наклонного конвейера 38 (фиг. 6). Камеры 18 размещены с возможностью фокусировки на рисунке крыльев цыплят 14 при их прохождении.
Вдоль пути второго наклонного конвейера 38 расположены вентиляторы 42 (фиг. 6). Вентиляторы 42 расположены с возможностью направления воздуха кверху при прохождении цыпленка 14. Активизацией вентиляторов управляет главная система 44 управления. Главная система управления связана с компьютерным процессором 32 (фиг. 7).
Колебательный механизм 46 по фиг. 6 прикреплен ко второму наклонному конвейеру 38. В ходе использования колебательный механизм 46 обеспечивает колебания второго наклонного конвейера 38. Колебательный механизм 46 связан с главной системой 44 управления. Ближе к концу пути конвейера 38 и над ним расположен источник 47 стробирующего света. Источник 47 стробирующего света также связан с главным контроллером 44.
Как показано на фиг. 2, на конце второго наклонного конвейера 38 расположен пятый конвейер 48. Пятый конвейер 48 принимает цыплят 14, сходящих со второго наклонного конвейера 38. Шестой конвейер 50 расположен непосредственно под вторым наклонным конвейером 38 перпендикулярно относительно него. Шестой конвейер 50 принимает цыплят 14, перемещаемых со второго наклонного конвейера 38, когда он находится в отведенном положении. Указанный процесс более подробно раскрыт в нижеприведенном описании.
Компьютерный процессор 32 содержит базу данных, содержащую хранимую в ней библиотеку цифровых изображений рисунков крыльев цыплят различных пород. Компьютерный процессор 32 (фиг. 7) также связан со вторым датчиком 40 присутствия, камерами 18 и приводом 30 (фиг. 6) посредством главной системы 44 управления. Кроме того, компьютерный процессор 32 также связан с главной системой 44 управления, управляющей скоростью конвейеров и выполнением работы в целом. Главная система 44 управления находится в электронной связи с камерами 18, вентиляторами 42 и колебательным механизмом 46 (фиг. 6) таким образом, что главная система управления может управлять запуском и остановкой каждого из указанных элементов. Схематичное отображение связи между вышеуказанными элементами приведено на фиг. 7.
В ходе использования после вылупления цыплят 14 их изначально обрабатывают и в определенный момент переводят на первый конвейер 12. Следует отметить, что может быть реализован ряд других конвейеров и разделителей, а также сходных элементов (не показаны), которые могут быть использованы для перемещения новорожденного цыпленка 14 на конвейер 12. Однако подобное оборудование и технологии работы в настоящем описании не раскрыты.
По мере перемещения цыпленка 14 по первому конвейеру 12 первый датчик 16 присутствия обнаруживает присутствие цыпленка, перемещающегося по первому конвейеру 12 (фиг. 2). Датчик 16 присутствия связывается с компьютерным процессором 32, активизирующим камеры 18, расположенные на конце пути первого конвейера 12, над указанным путем и вдоль наклонного конвейера 20 (фиг. 3). Камеры 18 получают по меньшей мере одно изображение цыпленка. Предпочтительно, камера 18 выполнена с возможностью получения видеоизображения живота, ног, лицевой части головы, и стоп цыпленка.
Изображение или изображения электронным образом передают в компьютерный процессор 32 (фиг. 7). Компьютерный процессор обрабатывает изображения и сравнивает их с изображениями в своей базе данных здоровых и больных цыплят одной и той же породы. В результате сравнения изображений, полученных камерой, с изображениями из библиотеки цифровых изображений, компьютерный процессор 32 может обнаруживать любые аномалии или отклонения на изображениях по стандартным изображениям в базе данных. В случае обнаружения отклонения на полученном изображении компьютерный процессор 32 фиксирует подобное отклонение в качестве аномалии или заболевания, требующего более пристального анализа.
Соответственно, компьютерный процессор передает результаты анализа в главную систему 44 управления (фиг. 4), активизирующую привод 30. Указанная активизация приводит к повороту ближнего конца 22 первого наклонного конвейера 20 и к перемещению дальнего конца 24 книзу с увеличением значения угла θ. При определенном значении угла θ цыпленок 14 физически не в состоянии оставаться на первом наклонном конвейере и падает на четвертый конвейер 36 (фиг. 2) для дальнейшего ручного обследования. Если цыпленок нездоров, его отделяют от здорового поголовья. В случае, если цыпленок оказывается здоровым, его возвращают в поголовье для дальнейшей обработки.
После переноса цыпленка на четвертый конвейер 36 привод 30 (фиг. 5) активизируют в обратном направлении, и он возвращает первый наклонный конвейер 20 в выдвинутое положение. В ходе указанного процесса дальний конец 24 первого наклонного конвейера 20 перемещают кверху при повороте ближнего конца 22 вокруг собственной оси с соответствующим уменьшением значения угла θ. После возвращения приводом первого наклонного конвейера 20 в исходное положение конвейер 20 готов к приему другого цыпленка 14. Таким образом, на третий конвейер 34 могут переходить исключительно здоровые цыплята.
После перемещения здорового цыпленка на третий конвейер 34 второй датчик 40 присутствия (фиг. 6) обнаруживает присутствие указанного цыпленка на третьем конвейере 34. Второй датчик 40 присутствия связывается с компьютерным процессором 32 и главной системой 44 управления (фиг. 7) с целью активизации камер 18, вентиляторов 42, источника 47 стробирующего света, и колебательного механизма 46, расположенного в непосредственной близости от второго наклонного конвейера 38.
По завершении перемещения по третьему конвейеру 34 цыпленок переходит на второй наклонный конвейер 38. В указанный момент цыпленок попадает на второй наклонный конвейер 38, на котором имеет место образованный вентиляторами 42 поток воздуха, направленный кверху от стоп цыпленка к его лицевой части и голове. Кроме того, поверхность второго наклонного конвейера 38 колеблется в результате активизации колебательного механизма 46. Направленный кверху поток воздуха и колеблющаяся поверхность вызывают у цыпленка ощущение потери равновесия. Цыпленок пытается восстановить равновесие путем поднятия и взмахов крыльями. В указанный момент камеры 18 получают изображения рисунка открытого крыла. Вспышки стробирующего света от источника 47 также призваны обеспечивать сходное стимулирующее воздействие на цыпленка.
Изображения передают в компьютерный процессор 32 (фиг. 7), обрабатывающий изображения и сравнивающий их с изображениями рисунков крыльев самцов и самок в базе данных цыплят соответствующей породы. В результате сравнения изображений компьютер может определять пол анализируемого цыпленка. В случае, если компьютерный процессор 32 определяет, что цыпленок является самкой, цыпленка переводят на пятый конвейер 48, упаковывают в ящик, и транспортируют в помещение для выращивания. В случае если определяют, что цыпленок является самцом, компьютерный процессор 32 активизирует привод 30, отведение которого приводит к повороту второго наклонного конвейера и к перемещению дальнего конца 20 книзу с сопутствующим увеличением значения угла θ. При определенном значении угла θ цыпленок 14 физически не в состоянии оставаться на конвейере и падает на другой конвейер 50 для дальнейшей обработки. Цыплят разделяют по половому признаку и обрабатывают отдельно.
После переноса цыпленка-самца 14 на другую платформу главная система 44 управления деактивирует привод 30 (фиг. 6). В результате второй наклонный конвейер 38 возвращается в выдвинутое положение. В ходе указанного процесса дальний конец 20 второго наклонного конвейера 38 перемещают кверху при повороте ближнего конца 18 вокруг собственной оси с соответствующим уменьшением значения угла θ. После возвращения приводом 30 второго наклонного конвейера 38 в исходное положение конвейер 38 готов к приему другого цыпленка.
Таким образом, очевидно, что раскрытые в настоящем описании варианты реализации в полной мере решают поставленные задачи и цели, и реализуют заявленные преимущества. При рассмотрении настоящего описания специалисту также будет очевидно множество альтернативных вариантов, модификаций, и вариаций. Соответственно, настоящее изобретение призвано охватывать все подобные альтернативные варианты, модификации, и вариации в пределах объема сопутствующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ ДОСТАВКИ ВЕЩЕСТВА ЖИВОТНОМУ | 2016 |
|
RU2736858C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ ВВЕДЕНИЯ ВЕЩЕСТВА ЖИВОТНОМУ | 2016 |
|
RU2735245C1 |
| Системы и способы определения пола и оценивания состояния здоровья только что вылупившихся цыплят | 2020 |
|
RU2816757C1 |
| УЗЕЛ ДЛЯ ПЕРЕМЕЩЕНИЯ И РАЗДЕЛЕНИЯ ЖИВЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПТИЦ | 2020 |
|
RU2830215C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМЕ УПАКОВКИ ПИЩЕВЫХ ПРОДУКТОВ | 2013 |
|
RU2586922C1 |
| СПОСОБ ОЦЕНКИ ЦЫПЛЯТ-БРОЙЛЕРОВ | 2011 |
|
RU2496315C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕЙ ЖИВОЙ МАССЫ БРОЙЛЕРОВ ПО СТАДУ ПРИ ИХ НАПОЛЬНОМ СОДЕРЖАНИИ | 2012 |
|
RU2515382C2 |
| ЛОТОК ДЛЯ ЯИЦ ДЛЯ ИНКУБИРОВАНИЯ ЯИЦ И ВЫЛУПЛЕНИЯ ИЗ НИХ ЦЫПЛЯТ | 2015 |
|
RU2684722C2 |
| СРЕДСТВО ДЛЯ ЛЕЧЕНИЯ И ПРОФИЛАКТИКИ ЗАБОЛЕВАНИЙ ЖЕЛУДОЧНО-КИШЕЧНОГО ТРАКТА ПТИЦЫ | 2016 |
|
RU2639544C1 |
| СИСТЕМА И СПОСОБ НЕИНВАЗИВНОГО ОПРЕДЕЛЕНИЯ СВОЙСТВ ЯЙЦА | 2018 |
|
RU2780420C1 |





Группа изобретений относится к сельскому хозяйству, в частности к определению состояния здоровья и пола цыпленка. Система (10) определения пола цыпленка содержит движущуюся платформу (12) для цыпленка (14), стимул для побуждения цыпленка на открытие его крыльев, устройство захвата изображения цыпленка (18) и компьютерный процессор, содержащий базу данных, содержащую библиотеку цифровых изображений рисунков крыльев цыплят различных пород, и связанный с устройством захвата изображения. Система определения состояния здоровья суточного цыпленка содержит движущуюся платформу, устройство захвата изображения цыпленка, процессор обработки изображений, связанный с устройством захвата изображения и с базой данных здоровых и больных цыплят соответствующей породы. Система сортировки цыплят на основании заданного признака цыпленка содержит движущуюся платформу, устройство захвата изображения, расположенное поблизости от движущейся платформы, компьютерный процессор, связанный с устройством захвата изображения и выполненный с возможностью обработки изображений и определения отклонения от заданного значения, и средства удаления цыпленка с движущейся платформы, связанные с компьютерным процессором. Повышается эффективность определения состояния здоровья и пола цыпленка. 3 н. и 14 з.п. ф-лы, 8 ил.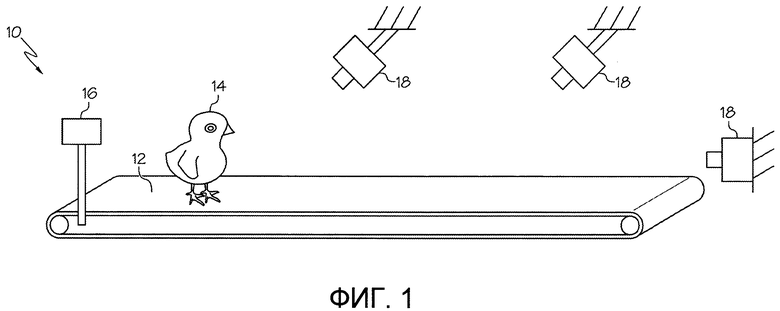
1. Система определения пола цыпленка, содержащая: движущуюся платформу для обеспечения опоры для цыпленка; по меньшей мере один стимул для побуждения цыпленка на открытие его крыльев; устройство захвата изображения для захвата по меньшей мере одного изображения цыпленка и компьютерный процессор, содержащий базу данных, содержащую библиотеку цифровых изображений рисунков крыльев, специфичных для породы цыплёнка, и связанный с устройством захвата изображения, причем устройство захвата изображения выполнено с возможностью захвата по меньшей мере одного изображения цыпленка и передачи указанного изображения в компьютерный процессор, который выполнен с возможностью обработки изображения и его сравнения с указанной базой данных изображений цыплят для определения пола.
2. Система по п. 1, также содержащая главную систему управления, связанную с устройством захвата изображения, движущейся платформой и компьютерным процессором.
3. Система по п. 1, в которой стимул может представлять собой один или более стимулов из следующей группы: наклонная конвейерная лента, колеблющаяся конвейерная лента, стробирующий свет или поток воздуха, воздействующий на цыпленка.
4. Система по п. 1, также содержащая устройство удаления, связанное с компьютерным процессором, причем, когда компьютерный процессор определяет пол цыпленка и определяет, какой пол следует оставить на движущейся платформе, обеспечена активация устройства удаления с удалением им цыпленка, определённый пол которого отличается от определённого пола, оставляемого на движущейся платформе.
5. Система определения состояния здоровья суточного цыпленка, содержащая: движущуюся платформу, на которой обеспечена возможность опоры для цыпленка; устройство захвата изображения для захвата по меньшей мере одного электронного изображения цыпленка; процессор обработки изображений, связанный с устройством захвата изображения и с базой данных изображений здоровых и больных цыплят одной и той же породы; причем устройство захвата изображения выполнено с возможностью захвата по меньшей мере одного изображения цыпленка с передачей указанного изображения в процессор обработки изображений, выполненный с возможностью сравнения указанного по меньшей мере одного изображения цыпленка с указанной базой данных изображений для обнаружения отклонения изображения по базе данных изображений.
6. Система по п. 5, в которой изображение представляет собой изображение стоп, лицевой части головы, живота, крыла или ног.
7. Система по п. 6, также содержащая устройство удаления, связанное с процессором обработки изображений, причем, когда обнаружено отклонение, обеспечена активация устройства удаления с удалением им цыпленка, имеющего обнаруженное отклонение, с движущейся платформы.
8. Система по п. 7, в которой устройство удаления содержит устройство для изменения положения движущейся платформы.
9. Система по п. 5, также содержащая устройство удаления, связанное с процессором обработки изображений, причем, когда вычисленная компьютером степень отклонения превышает заданный диапазон, обеспечена активация устройства удаления с удалением им цыпленка, имеющего расхождение, превышающее заданный диапазон, с движущейся платформы.
10. Система сортировки цыплят на основании заданного признака цыпленка, содержащая: движущуюся платформу для обеспечения опоры для цыпленка; устройство захвата изображения, расположенное поблизости от движущейся платформы для захвата по меньшей мере одного изображения цыпленка при его перемещении на движущейся платформе; компьютерный процессор, связанный с устройством захвата изображения, содержащий базу данных изображений заданного признака цыпленка и выполненный с возможностью обработки изображений и определения отклонения по указанной базе данных изображений; и средства удаления для удаления цыпленка с движущейся платформы, связанные с компьютерным процессором, причем при получении устройством захвата изображения цыпленка и передачи его в компьютерный процессор, компьютерный процессор обрабатывает изображение и определяет отклонение изображения по указанной базе данных изображений; при этом в случае обнаружения отклонения компьютерный процессор связывается со средствами удаления для удаления цыпленка с движущейся платформы.
11. Система по п. 10, в которой заданный признак представляет собой крыло, лицевую часть, живот или стопы.
12. Система по п. 10, также содержащая устройство удаления, связанное с компьютерным процессором и активизируемое, когда компьютерный процессор определяет, что отклонение изображения цыпленка превышает заданный диапазон, при этом устройство удаления удаляет цыпленка, имеющего расхождение, превышающее заданный диапазон, с движущейся платформы.
13. Система по п. 10, также содержащая по меньшей мере один стимул, расположенный поблизости от движущейся платформы.
14. Система по п. 13, в которой стимул может представлять собой один или более стимулов из следующей группы: наклонный конвейер, колеблющийся конвейер, стробирующий свет или поток воздуха, воздействующий на цыпленка.
15. Система по п. 14, в которой наклонный конвейер содержит ближний конец и дальний конец, причем дальний конец расположен ниже ближнего конца.
16. Система по п. 15, в которой наклонный конвейер ориентирован под углом θ к горизонту.
17. Система по п. 12, в которой устройство удаления содержит устройство изменения положения движущейся платформы.
| Регулятор тяги для паровых котлов | 1924 |
|
SU1405A1 |
| US 20050098121 A1, 12.05.2005 | |||
| КВАНТРОН ТВЕРДОТЕЛЬНОГО ЛАЗЕРА С ТЕРМОСТАБИЛИЗАЦИЕЙ ДИОДНОЙ НАКАЧКИ | 2014 |
|
RU2579188C1 |
| US 2001035370 A1, 01.11 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| СИСТЕМА И СПОСОБ КОРМЛЕНИЯ ДЛЯ ТРАНСФОРМАЦИИ ПОВЕДЕНИЯ ЖИВОТНЫХ | 2008 |
|
RU2474110C1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

