Изобретение относится к контрольно-измерительной технике, а именно к системе автоматизированного мониторинга транспортного потока с функцией определения типа транспортных средств (ТС) с распознанием лесовозов из видеопотока и контролем «лесовоз с грузом» и «лесовоз порожний» преимущественно в местах въезда-выезда с объектов лесозаготовительной и лесоперерабатывающей инфраструктуры. Аппаратно-программный комплекс (АПК) в автоматическом режиме осуществляет идентификацию типов ТС с выделением лесовозов и контролем «с грузом-порожний», определяет их государственные регистрационные знаки (ГРЗ), дату, время, географические координаты, направления движения. Заявленный объектовый блок, оборудованный видеокамерами, обеспечивающий распознание лесовозов из видеопотока, размещается на опоре в виде стационарного устройства преимущественно в непосредственной близости мест заготовки и складирования древесины, лесоперерабатывающих комплексов, терминалов погрузки на железнодорожный и водный транспорт, а также въездах-выездах с лесных участков, где предположительно ведется незаконная вырубка леса. Кроме того, блок сконструирован с возможностью функционального расширения специализированного мониторинга движения лесовозов для размещения на автомобильных дорогах общего пользования.
Целью заявляемого АПК является автоматизированный контроль за оборотом древесины на территории РФ.
Задачей, на решение которой направлено заявляемое техническое решение, контроль оборота древесины в «Единой государственной автоматизированной системе учета древесины и сделок с ней» (ЛесЕГАИС), путем осуществления автоматизированного мониторинга лесовозов с грузом и без груза на рубежах контроля объектов заготовки, хранения и переработки древесины и сопоставления транспортируемых объемов древесины с выданным разрешительным электронно-сопроводительным документом (ЭСД) на рубку лесных насаждений и последующим администрированием со стороны государственного органа контроля.
Известные системы контроля фиксации ТС как правило содержат аналогичный набор устройств, оснащенных системой автономного питания, включающих в себя видеокамеру (или несколько видеокамер) с возможностью захвата изображения ТС, модуль обработки видеосигналов, приемник ГЛОНАСС для позиционирования своих географических координат и синхронизации времени, оборудование связи с оператором GSM для передачи данных в вычислительный центр для обработки поступившей информации. Системы различаются направлениями функций контроля параметров ТС в соответствии с поставленными задачами и оригинальным программным обеспечением (ПО) обработки контролируемой информации, а также многоуровностью навигационно-информационных систем мониторинга транспортных средств (конкретных предприятий, регионов, федерального масштаба).
Известен Аппаратно-программный комплекс территориальной информационной системы (патент РФ №88464, МПК G06F 17/10, опубликовано 10.11.2009) в составе надсистемы регионального уровня, подключенной к связанным друг с другом информационными потоками территориальным информационным системам муниципальных образований, включающих в себя одну и более отраслевую подсистему, выполненную в виде подключенных друг к другу ядра учетного уровня и ядра оперативного уровня, а также связанные информационными потоками с отраслевыми подсистемами ядро нормирующего уровня и ядро интегрального уровня. Новым является то, что ядро нормирующего уровня и ядро интегрального уровня в каждой из территориальных информационных систем муниципальных образований объединены в подсистему муниципального уровня принятия решения, а надсистема регионального уровня и ядра территориальных информационных систем муниципальных образований оборудованы автоматизированными информационными системами, автоматизированные рабочие места которых объединены в локальную сеть. Полезная модель позволяет использовать общие универсальные принципы построения территориальных систем мониторинга с организацией автоматических рабочих мест (АРМ) независимо от объекта контроля.
Известна Многоуровневая навигационно-информационная система мониторинга ТС (патент РФ №2612943, МПК G08B 25/10, опубликовано 14.03.2016), включающая расположенный на каждом транспортном средстве мобильный терминал транспортного средства, получающий информацию о местоположении транспортного средства от спутниковых навигационных систем и передающий информацию о местоположении с помощью систем передачи данных через сеть Интернет на сервер хранения и обработки данных главного центра сбора и обработки данных, а указанный сервер хранения и обработки данных соединен с рабочими станциями, при этом главный центр сбора и обработки данных содержит дополнительный сервер резервного копирования и соединен с серверами хранения и обработки данных региональных центров сбора и обработки данных, причем разделение информации происходит по принципу принадлежности транспортного средства к конкретному региону, каждый региональный сервер хранит электронные карты местности данного региона, к региональным серверам подключены рабочие станции, при этом каждый региональный центр снабжен резервным GSM каналом связи для получения SMS сообщений с информацией о местоположении от мобильного терминала транспортного средства непосредственно на рабочую станцию, сервер хранения и обработки данных главного центра сбора и обработки данных имеет модуль связи с внешней автоматизированной информационно-управляющей системой единой государственной системы предупреждения и ликвидации чрезвычайных ситуаций, и соединенный с ним модуль прогнозирования наступления чрезвычайных ситуаций техногенного и природного характера, и соединенный с ним модуль расчета группировки сил и средств в случае угрозы и чрезвычайных ситуаций техногенного и природного характера, выполненный с возможностью рассчитывать время прибытия транспортных средств в зону чрезвычайных ситуаций. Новым является принцип построения блок-схемы сбора, обработки, анализа и хранения потоков информации, поступающей со всех уровней - муниципального, регионального, федерального, для дальнейшего принятия решений по оповещению и планированию действий чрезвычайных ситуациях. К недостаткам можно отнести то, что для формирования системы мониторинга требуется установка ведомственного мобильного терминала на каждое контролируемое ТС.
Известен Комплекс мониторинга местоположения и параметров движения транспортных средств (патент РФ №112472, МПК G08B 25/10, опубликовано 10.01.2012), включающий расположенные на каждом транспортном средстве мобильный терминал транспортного средства (МТТС), получающий информацию о местоположении ТС от спутниковых навигационных систем, например ГЛОНАСС, GPS, и передающий информацию о местоположении с помощью систем передачи данных, например GSM (CSD, GPRS, SMS), INMARSAT, через сеть Интернет на сервер хранения и обработки данных главного центра сбора и обработки данных, а сервер хранения и обработки данных соединен с рабочими станциями, при этом главный центр сбора и обработки данных содержит дополнительный сервер резервного копирования, отличающийся тем, что соединение сервера хранения и обработки данных главного центра сбора и обработки данных с сетью Интернет идет через межсетевой экран - Firewall сервер, при этом сервер хранения и обработки данных главного центра соединен через единую внутреннюю сеть организации (ЕВСО) без доступа в Интернет с серверами хранения и обработки данных региональных центров сбора и обработки данных, причем разделение информации происходит по принципу принадлежности транспортного средства к конкретному региону, каждый региональный сервер хранит электронные карты местности данного региона, к региональным серверам подключены рабочие станции (компьютеры), при этом каждый региональный центр снабжен резервным GSM каналом связи для получения SMS сообщений с информацией о местоположении от МТТС непосредственно на рабочую станцию. Решение позволяет использовать принципы построения разделения информации по мониторингу ТС на разных региональных уровнях сбора, обработки и хранения информации о контролируемых ТС. К недостаткам можно отнести то, что на каждом ТС должен быть смонтирован мобильный терминал для формирования системы мониторинга движения ТС.
Известна система фиксации нарушений скоростного режима ТС (патент РФ №110856, МПК G08G 1/054, опубликовано 27.11.2011), содержащая по меньшей мере два регистратора, каждый из которых включает в себя по меньшей мере одну видеокамеру и компьютер для обработки видеосигнала и выполнен с возможностью захвата изображения ТС, оснащен приемником ГЛОНАСС с возможностью определения географических координат и синхронизации времени, компьютер через межсетевой экран с криптопровайдером связан с адаптером и модемом, который через систему связи с оператора посредством сети передачи данных соединен с вычислительным центром, выполненным с возможностью вычисления скорости ТС по данным, получаемым с регистраторов. В дальнейшем система получила развитие (патент №135828, МПК G08G 1/052, опубликовано 20.12.2013) тем, что удаленный сервер содержит дополнительные блоки сравнения для вычисления средней скорости ТС и синхронизации по времени между регистраторами, а также блоки хранения и сравнения распознанных ГНЗ, с внешней базой данных с целью выявления и контроля за перемещением интересующих транспортных объектов, что увеличивает достоверность полученных данных.
Известен Способ автоматической классификации транспортных средств (патент РФ №2486597, МПК G08G 1/015, G08G 1/04 опубликовано 27.06.2013), принятый за прототип, в котором используют цифровые оптико-электронные преобразователи на основе видеокамеры и средства цифровой обработки данных; непрерывно получают видеопоток с камеры, установленной сбоку от зоны наблюдения; компенсируют радиальную дисторсию кадров видеопотока, получая множество значений элементов видеопотока Pxyt, по пространственно-временным координатам; вычисляют коэффициенты корреляции по координатам х, у D1(t) на соответствие профилю ТС за период нахождения транспортного средства в поле зрения камеры и по сравниванию с заданными пороговыми значениями определяют количество осей транспортного средства; по значениям Ycf(t) и максимальному значению ytop за период Т4 определяют высоту транспортного средства, тем самым определяя соответствующий тип ТС.
Программное обеспечение способа позволяет надежно определять тип ТС по нескольким сравнительным параметрам, но не предназначен для определения и контроля состояния ТС - «с грузом или порожний», а также направления движения ТС, так как непрерывно получают видеопоток с камеры, установленной сбоку от зоны наблюдения без привязки направления движения ТС по отношению к рубежу контроля.
Функционально предлагаемое техническое решение включает отдельные функции каждого из вышеприведенных аналогов: анализ транспортного потока с определением типа ТС, определение времени и места нахождения ТС, передачи данных на территориальные сервисы контроля, заданных параметров. В тоже время, с учетом специфики задачи по непрерывному мониторингу движения лесоматериалов через контроль рубежа «въезд-выезд» лесозаготовительных и деревообрабатывающих предприятий, предлагаемое техническое решение имеет дополнительные функции: приоритетное определение ТС «Лесовоз» с дальнейшим контролем параметров «лесовоз с грузом»-«лесовоз порожний» и фиксацией направления движения на рубеже «въезд-выезд» предприятия.
Техническим результатом является повышение уровня контроля за оборотом древесины на предприятиях её заготовки, хранения и переработки с целью предотвращения заготовки лесных насаждений без разрешительной документации на территории РФ.
Указанный технический результат достигается тем, что Аппаратно-программный комплекс (АПК) по мониторингу лесовозов и логистики объектов лесопромышленного комплекса, содержащий объектовый регистратор, расположенный сбоку рубежа контроля, в составе видеокамеры, выполненной с возможностью захвата изображения транспортного средства (ТС), модуля обработки видеосигнала с функцией определения типа ТС по его высоте и количеству осей ТС, возможностью распознания государственного регистрационного номера (ГРЗ), блока основного электропитания от внешней сети и резервного от аккумулятора, приемника связи с глобальной спутниковой навигационной системой с возможностью определения своих географических координат и синхронизации времени, блока связи передачи данных в компьютерный центр через систему связи оператора посредством сети передачи данных, программного модуля обработки и хранения полученных данных компьютерного центра для формирования отчета параметров движения ТС по ГРЗ, особенностью является то, что объектовый регистратор расположен напротив рубежа контроля въезда-выезда с предприятий заготовки, хранения и переработки древесины при этом угол обзора видеокамеры установлен с ракурсом не более 15 градусов от вероятного направления движения ТС, модуль обработки видеосигнала с каждого объектового регистратора, помимо вышеуказанных систем идентификации типа ТС «лесовоз» по габаритным размерам, количеству осей и определения ГРЗ ТС, дополнительно оборудован системами распознания параметра «лесовоз с грузом» - «лесовоз порожний» и распознания направления движения лесовоза «въезд-выезд» на рубеже контроля, которые, наравне с вышеуказанными данными, передаются посредством вышеупомянутой сети передачи данных на удаленный специализированный сервер для обработки и хранения информации с формированием отчетов по объему оборота древесины как по каждому объекту контроля, так и по каждому ТС по ГРЗ на рубеже наблюдения и последующей передачи отчетов на сервер вычислительного центра (ВЦ) органов территориального управления лесной охраны для сопоставления фактического объема оборота и заявленного предприятием с выданными разрешительными документами на транспортировку древесины в базе данных ВЦ, а также данными календарных отчетов предприятий.
Также, АПК предусматривает оперативную отправку сообщений контролирующим структурам на адрес электронной почты и/или на мессенджеры мобильных телефонов о факте выявления нарушения транспортировки древесины, что позволяет провести оперативные мероприятия по выявленному факту на месте совершения правонарушения.
В дальнейшем изобретение поясняется описанием и фигурами, где:
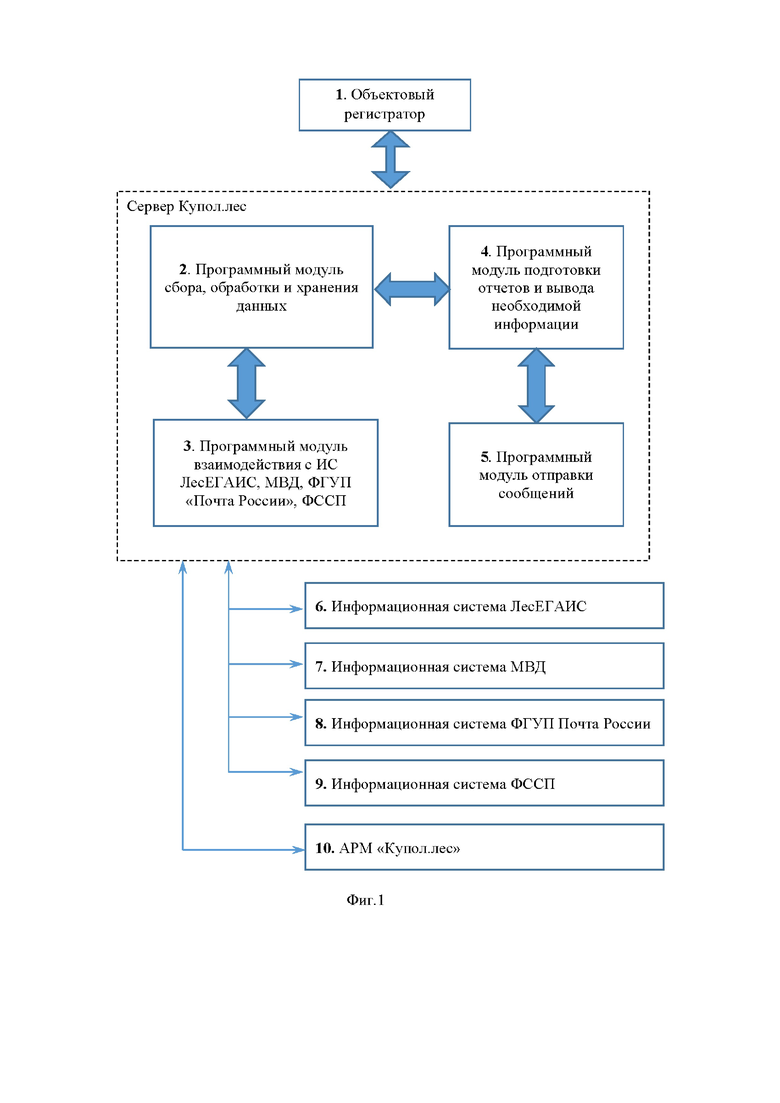
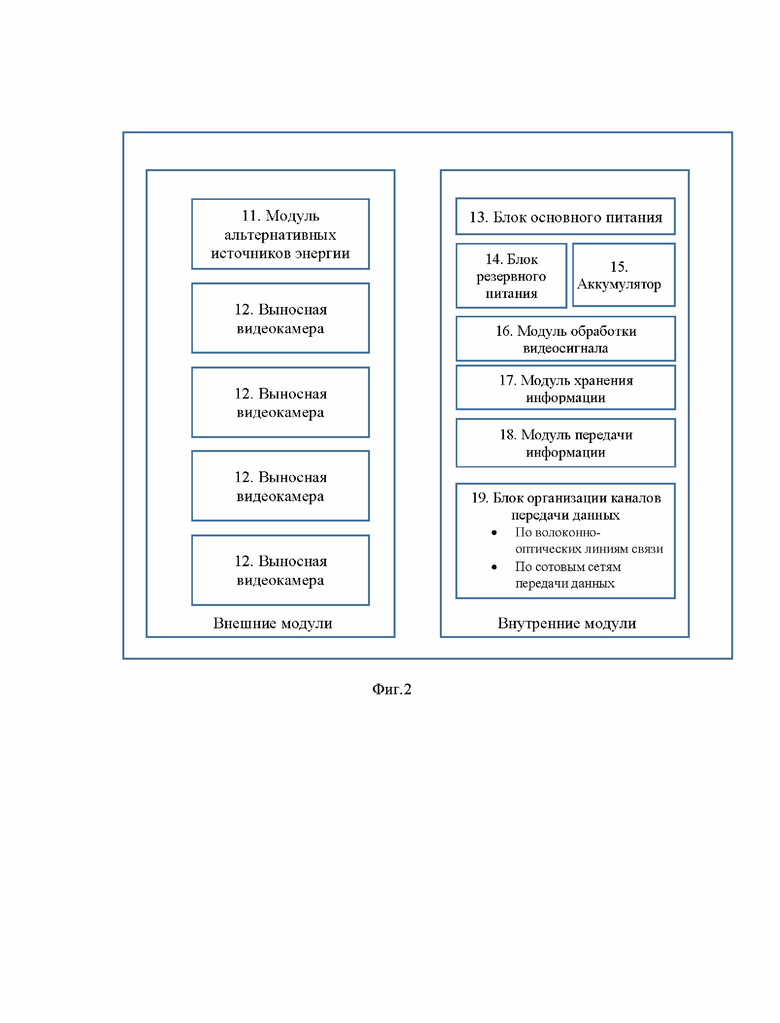
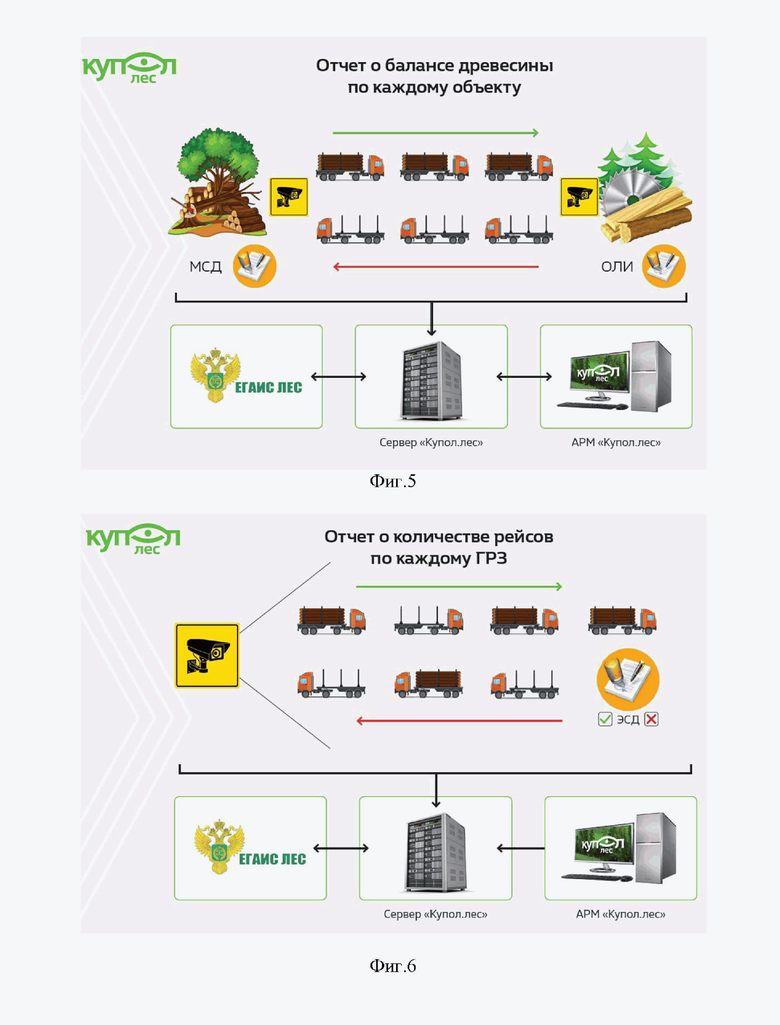
Фиг.1. Блок-схема АПК, Фиг.2. Состав объектового регистратора АПК, Фиг.3. Система сбора и анализа информации, Фиг.4. Система распознания лесовоз «груженый-порожний», Фиг.5. Система формирования отчета о балансе древесины по каждому контролируемому объекту, Фиг.6. Система формирования отчета о количестве рейсов лесовозов по каждому ГРЗ.
Аппаратно-программный комплекс (Фиг.1) состоит из объектового регистратора 1, удаленного сервера, включающего программный модуль сбора, обработки и хранения данных 2, программный модуль взаимодействия с различными информационными системами (ЛесЕГАИС, МВД, ФГУП «Почта России», ФССП) 3, программный модуль подготовки отчетов и вывода необходимой информации 4, программный модуль отправки сообщений 5. По каналам передачи данных к Серверу подключаются информационная система ЛесЕГАИС 6, информационная система МВД 7, информационная система ФГУП «Почта России» 8, информационная система ФССП 9, неограниченное число АРМ 10, системы навигации ГЛОНАСС (на Фиг.1 не показан).
Объектовый регистратор 1 выполнен в отдельном корпусе (Фиг.2) и состоит из внешнего модуля в состав которого входят: модуль альтернативных источников энергии (солнечная панель) 11 и выносных камер с возможностью размещения до 4-х штук с модулем подключения инфракрасной подсветки (на фиг.2 не показан) 12; внутреннего модуля в состав которого входят: блок основного электропитания от стандартной электрической сети 220В, как вариант от опоры уличного освещения, 13, блока резервного питания 14, аккумулятора 15, модуля обработки видеосигнала с возможностью подключения до 4-х видеокамер 16, модуля хранения информации 17, модуля передачи информации 18, блока организации каналов передачи данных по волоконно-оптическим линиям связи (ВОЛС) и/или по сотовым сетям передачи данных, приёмника ГЛОНАСС/GPS (на фиг.2 отдельно не показан).
Объектовый регистратор 1 адаптирован для монтажа на опору любого типа и назначения (металлическая гранения, бетонная, деревянная), которая устанавливается/имеется, например, опора уличного освещения, на землях государственного или муниципального фонда в непосредственной близости от объекта наблюдения и контроля, а именно напротив рубежа въезда-выезда с объектов заготовки, хранения и лесопереработки. Монтаж опоры и/или использования существующей на землях государственного или муниципального фонда позволяет исключить сложные согласования с незаинтересованной администрацией контролируемого объекта, при необходимости обустроить рубеж наблюдения, включая монтаж искусственного барьера ограничения скорости ТС, например, «лежачим полицейским», и устройствами задания направления движения ТС на въезде-выезде объекта, и организовать дополнительное освещение рубежа в темное время суток.
Видеокамера 12 внешнего модуля объектового регистратора 1 (Фиг.2) используются для съемки ТС, проезжающих через объектовый рубеж наблюдения, фотографии с которых передаются на внутренний модуль обработки видеосигнала 16 на который устанавливается операционная система Linux, зарегистрированное авторское программное обеспечение для создания виртуальной государственной/частной сети и прикладное программное обеспечение работы составных частей АПК.
Видеокамеры с ИК-подсветкой по интерфейсу FastEthernet устанавливаются с расчетом, чтобы расстояние от места установки видеокамеры до рубежа наблюдения было не более 30 метров. Объектив камеры выбирается из расчета, чтобы размеры пластин ГРЗ составлял не менее 70 пикселей по ширине пластины ГРЗ. При использовании одной видеокамеры угол обзора устанавливается не более 15 градусов от вероятного направления движения ТС так, чтобы общий вид видеокамеры захватывал как фронтальную часть ТС, так и его боковую. В зависимости от условий наблюдения и для полноты и достоверности контролируемой информации используются 2-4 камеры, которые настраиваются на раздельный обзор фронтальной и боковой частей ТС, при этом нейросеть программного комплекса сравнивает полученные «картинки», фильтрует по качеству и в дальнейшем использует наиболее достоверные изображения со всех задействованных камер каждого контролируемого параметра, определяющих тип ТС «Лесовоз», ГРЗ, состояние «груженый-порожний», направление движения.
Задачей внутреннего объектового модуля регистратора 1 является детектирование всех ТС, проезжающих через рубеж наблюдения. Алгоритм нейросети автоматически определяет тип ТС каждого детектированного ТС, проезжающего через рубеж в соответствии с Таблицей
По каждому факту детектирования ТС фиксируются и хранятся в памяти следующие данные:
1. Дата
2. Время
3. Координаты установки объектового регистратора
4. Направление движения (въезд/выезд)
5. Распознанные символы государственного регистрационного знака.
6. Тип транспортного средства, при этом задача по выявлению ТС «Лесовоз» является приоритетной, и система автоматически определяет параметр «лесовоз с грузом» или «лесовоз без груза».
Под лесовозом понимается транспортное средство для перевозки лесоматериалов, оборудованное платформой, габариты которой ограничены лонжеронами (кониками).
Приемник ГЛОНАСС/GPS в составе внутреннего модуля регистратора (на фиг.2 не показан) служит для получения сведений о местоположении объектового регистратора 1 и получения сигналов точного времени посредством сети глобальной спутниковой навигационной системы (на Фиг.1 не показана), которые передаются на объектный регистратор (Фиг.2) для последующей обработки и сопоставления их с фактическим местом и временем детектирования ТС (Фиг.3).
Вся зафиксированная информация по каждому факту детектирования ТС хранится в модуле хранения информации 17 энергонезависимой памяти объектового блока UBS 2.0 и далее через модуль передачи информации 18 передается блоком организации каналов передачи данных 19 по организованным каналам связи, как по сотовым, так и волоконно-оптическим (ВОЛС), в программный модуль сбора, обработки и хранения данных 2 (Фиг.1) сервера (Фиг.3). В случае прерывания канала связи, вся зафиксированная информация по каждому ТС сохраняется до момента подтверждения получения данных программным модулем сбора, обработки и хранения данных 2 сервера. Сервер (Фиг.3, 4, 5, 6) содержит авторское программное обеспечение (ПО), а также специальное ПО (сервер времени) для синхронизации по времени всех объектных блоков 1, подключенных к серверу, и представляет собой комплекс оборудования, являющийся связующим звеном для всех объектовых регистраторов. Программный модуль сбора, обработки и хранения информации 2 (Фиг.1) в составе сервера предназначен для сбора, анализа, систематизации и хранения поступившей информации со всех Объектовых регистраторов 1 по каждому детектируемому ТС на рубеже наблюдения (Фиг.3), автоматически распределяет по 6-ти типам ТС, отдельно выделяет тип ТС - «Лесовоз» и, свою очередь, идентифицирует «Лесовоз с грузом» и «Лесовоз порожний» (Фиг.4). Программный модуль сбора, обработки и хранения информации 2 отвечает за хранение как первичной информации от всех объектовых регистраторов 1, так и за хранение обработанной информации в других модулях сервера. Кроме того, здесь хранятся данные о расположении объектовых регистраторов, а также другая служебная информация, необходимая для работы системы мониторинга и контроля ТС.
Программный модуль подготовки отчетов и вывода требуемой информации 4 (фиг.1) в составе сервера предназначен для формирования отчетов по объектам контроля. Наличие интеграции с информационными системами ЛесЕГАИС 6, МВД 7, ФГУП «Почта России» 8, ФССП 9 позволяет оперативно получать информацию органами территориального управления лесной охраны, сопоставлять перевозимые объемы древесины с выданными разрешительными документами на рубку лесных насаждений и полностью автоматизировать процесс контроля объектов заготовки, хранения и переработки древесины. Программный модуль отправки сообщений предназначен для оперативного информирования контролирующих структур о факте нарушения требований при транспортировке древесины, что позволяет оперативно провести необходимые мероприятия на месте совершения правонарушения. АРМ через WEB интерфейс подключается к серверу. АРМ может быть установлен на рабочих местах сотрудников контролирующих структур. Количество подключений АРМ к серверу неограниченно. Функционал АРМ позволяет подключить объектовый регистратор к серверу. выполнить привязку объектового регистратора к объекту лесопереработки, получать необходимые отчеты по каждому регистратору, объекту лесопереработки и транспортному средству в любые временные промежутки. Так же функционал АРМ позволяет настроить условия формирования и отправки сообщений по факту выявления правонарушений при транспортировке древесины.
Аппаратно-программный комплекс (АПК) работает следующим образом. После подачи питания Объектовый блок 1 производится синхронизация времени и определение местоположения объектового регистратора посредством приемника ГЛАНСС и глобальной спутниковой навигационной системы. Далее эта процедура периодически повторяется в зависимости от настроек АПК. Внутренний Модуль обработки видеосигналов 16 получает от выносной видеокамеры (видеокамер) 12 внешнего модуля регистратора 1 по интерфейсу FastEthernet фотографии всех ТС, которые пересекли рубеж наблюдения и контроля, с помощью специального ПО систематизирует ТС на 6-ть типов и отдельно выделяет тип ТС - «Лесовоз» (Фиг.3) с функцией автоматического определения «Лесовоз с грузом» или «Лесовоз порожний» (Фиг.4). Одновременно по каждому детектируемому ТС регистрируются дата и время проезда через рубеж контроля, государственный регистрационный знак (ГРЗ), направление движения ТС «въезд-выезд» на объект контроля. Как только на фотографии обнаружен ГРЗ лесовоза Модуль обработки видеосигналов 16 сопоставляет фотографию с точным временем и координатами и сохраняет их в локальной базе модуля хранения информации 17. Обмен данными между Объектовым блоком 1 и сервером АПК осуществляется посредством модуля передачи информации 18 через Блок организации каналов передачи данных 19 по ВОЛС или сотовым сетям передачи данных и передает накопленную информацию о факте фиксации ТС на рубеже контроля, состоящую из распознанных ГРЗ, типов ТС с выделением лесовозов и указанием параметра последних с грузом или нет, направлением движения «въезд-выезд», географических координат и времени фиксации. Поступившая информация со всех Объектовых регистраторов 1 обрабатывается, систематизируется и хранится в Программном модуле сбора, обработки и хранения данных 2 в составе сервера АПК. После чего, Программный модуль подготовки отчетов и вывода необходимой информации 4 формирует отчеты: по отдельному объекту контроля, по отдельному въезду, по дате и времени, по типам ТС, по ГРЗ, по параметру «с грузом/порожний». Функция определения ТС - «лесовоз» с параметром «с грузом/порожний» позволяет с помощью Программного модуля взаимодействия с информационными системами ЛесЕГАИС 6, МВД 7, ФГУП «Почта России» 8, ФССП 9 проводить анализ данных, по которым можно вычислить количество циклов (рейсов) с грузом и без груза, тем самым определив общий объем лесоматериалов по каждому ГРЗ ТС (Фиг.5), сформировать и направить отчеты как по каждому лесовозу (отчет ГРЗ ТС), так и по каждому контролируемому объекту (Фиг.6) на АРМ территориального органа лесоохраны 10. В последнем сопоставляются данные отчетов о транспортируемых объемах древесины с базой данных о выданных разрешительных документах на заготовку древесины по каждому контролируемому объекту заготовки, хранения и переработки древесины, которые согласно Приказу №590 Минприроды РФ с 01.03.2022 должны представлять отчет о ввезенной на склад или вывезенной со склада древесине, а также перечень специальных сведений, вносимых в данный отчет, подлежащие учету в Единой государственной автоматизированной информационной системе учета и сделок с ней (ЛесЕГАИС).
Аппаратно-программный комплекс обеспечивает получение необходимых и достаточных данных, а также функциональные возможности по их обработке, а именно:
• Сбор, обработка и хранение информации обо всех транспортных средствах, прошедших через зону контроля, автоматического определения типов транспортных средств «лесовоз с грузом» и «лесовоз порожний», на рубежах контроля объектов заготовки, хранения и переработки древесины, которая может быть использована впоследствии в качестве доказательной базы наличия состава административного правонарушения не менее 12 месяцев с даты получения информации;
• Сопоставления информации с информационной системой ЛесЕГАИС о транспортируемых объемов древесины с выданным электронным сопроводительным документом (ЭСД) на транспортировку древесины и последующим администрированием со стороны государственного органа контроля;
• Обеспечение взаимодействия и обмен информацией с информационными системами государственных органов контроля (МВД России, ФГУП «Почта России», ФССП России), Государственной информационной системой о государственных и муниципальных платежах и другими информационными системами;
• Сбор и обработка данных о неисправностях оборудования, входящего в состав системы, и его диагностика.
Предприятие-заявитель создало, смонтировало и испытало действующий образец объектового регистратора на рубеже наблюдения въезда-выезда одного из лесоперерабатывающих предприятий Тюменской области, собрало описанный АПК обработки и хранения информационного потока, и, с помощью авторского ПО и специальной подпрограммы, получила заявляемый технический результат.
Заявляемый АПК позволяет расширить функциональные возможности системы. Так, например, при согласовании с администрациями отраслевых лесопредприятий и установки мобильных терминалов на лесовозы, система позволяет организовать мониторинг местоположения ТС на всем пути следования от склада заготовленной древесины до склада лесоперерабатывающего предприятия с сохранением всех функциональных возможностей по информационному детектированию ТС на рубежах контроля, что позволяет повысить «снизу» встречный уровень контроля и достоверности отчетов в ЛесЕГАИС заинтересованных предприятий ЛПК за оборотом древесины.
Предлагаемый АПК позволяет повысить уровень контроля за оборотом древесины на предприятиях её заготовки, хранения и переработки с целью предотвращения заготовки древесины без разрешительной документации на территории РФ.

Изобретение относится к аппаратно-программному комплексу (АПК) по мониторингу лесовозов и логистики объектов лесопромышленного комплекса. АПК содержит: объектовый регистратор, модуль обработки видеосигнала, блок основного и резервного электропитания, приемник с спутниковой навигационной системой, блок связи, программный модуль. Выносная камера внешнего модуля расположена на расстоянии от рубежа контроля и под углом к вероятному направлению движения ТС по рубежу въезда-выезда предприятий заготовки, хранения и переработки древесины. Изображения лесовозов передаются на удаленный специализированный сервер с формированием отчетов по объему оборота древесины по каждому объекту контроля и по каждому ТС. Достигается повышение уровня контроля за оборотом древесины на территории РФ. 3 з.п. ф-лы, 6 ил., 1 табл.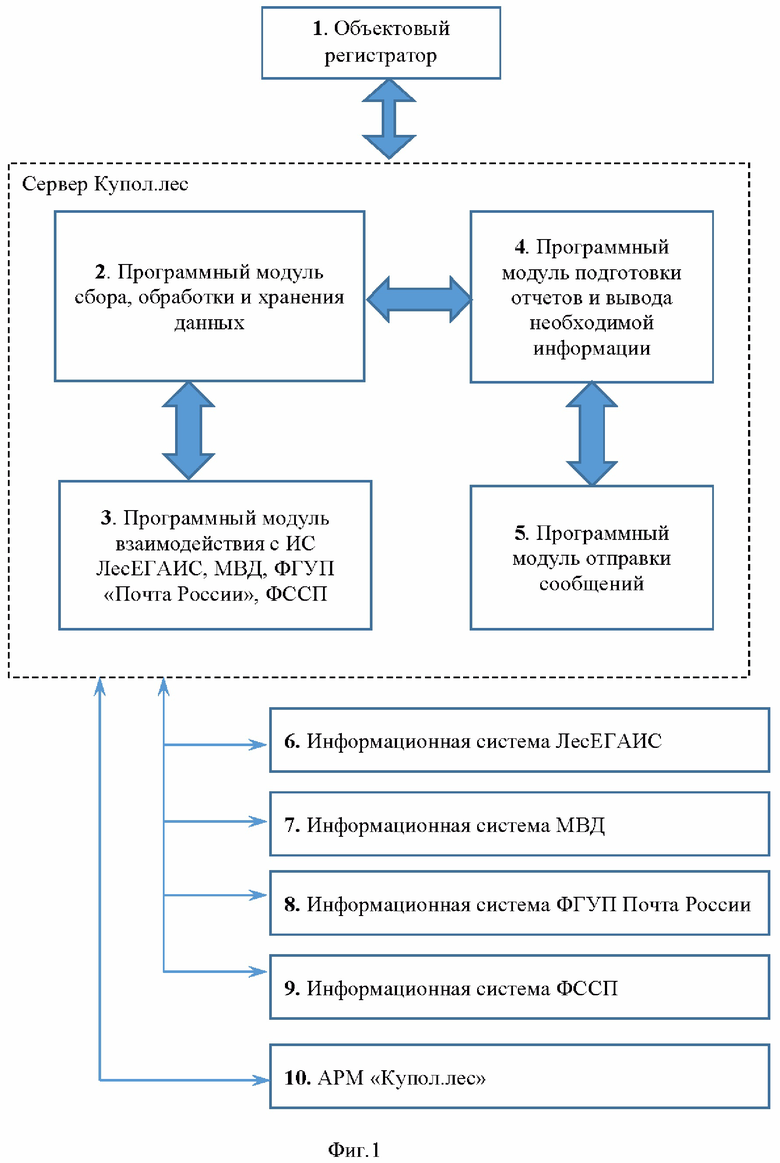
1. Аппаратно-программный комплекс (АПК) по мониторингу лесовозов и логистики объектов лесопромышленного комплекса, содержащий объектовый регистратор, расположенный на рубеже контроля, в составе видеокамеры, выполненной с возможностью захвата изображения транспортного средства (ТС), модуля обработки видеосигнала с функцией определения типа ТС по его высоте и количеству осей ТС, возможностью распознания государственного регистрационного знака (ГРЗ), блока основного электропитания от внешней сети и резервного от аккумулятора, приемника связи с глобальной спутниковой навигационной системой с возможностью определения своих географических координат и синхронизации времени, блока связи передачи данных в компьютерный центр через систему связи оператора посредством сети передачи данных, программного модуля обработки и хранения полученных данных компьютерного центра для формирования отчета параметров движения ТС по ГРЗ, отличающейся тем, что объектовый регистратор состоит из двух модулей, внутренний выполнен в едином корпусе, содержит все вышеперечисленные модули и блоки, расположен на подставной опоре, выносная камера внешнего модуля расположена на расстоянии от рубежа контроля и под углом к вероятному направлению движения ТС по рубежу въезда-выезда предприятий заготовки, хранения и переработки древесины, с возможностью захвата изображения фронтальной и боковой частей ТС для идентификации шести типов ТС с выделением «лесовоз», «лесовоз автопоезд» и разделением последних «с грузом-порожний» модулем обработки видеосигнала регистратора, дополнительно оборудован системой распознания направления движения лесовоза «въезд-выезд» на рубеже контроля, которые, наравне с вышеуказанными данными, по совокупности и одновременно передаются посредством вышеупомянутой сети передачи данных на удаленный специализированный сервер для обработки и хранения информации с формированием отчетов по объему оборота древесины как по каждому объекту контроля, так и по каждому ТС по ГРЗ на рубеже наблюдения и последующей передачи отчетов на сервер вычислительного центра (ВЦ) органов территориального управления лесной охраны для сопоставления фактического объема оборота и заявленного предприятием с выданными разрешительными документами на транспортировку древесины в базе данных ВЦ, а также данными календарных отчетов предприятий.
2. АПК по п.1, отличающийся тем, что объектовый регистратор дополнительно оснащен в качестве альтернативного источника питания солнечной панелью.
3. АПК по п.1, отличающийся тем, что объектовый регистратор выполнен с возможностью подключения до трех дополнительных камер.
4. АПК по п.1, отличающийся тем, что при подключении дополнительной камеры первая устанавливается по направлению движения так, чтобы захватывать фронтальную часть ТС, вторая - боковую.
| US 2020090362 A1, 19.03.2020 | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486597C1 |
| Система распознавания государственных регистрационных знаков "Умный шлагбаум" | 2021 |
|
RU2769823C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЦИАНИСТОГО ВОДОРОДА | 1935 |
|
SU43886A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ ДВУХ И БОЛЕЕ ТЕРРИТОРИАЛЬНО УДАЛЕННЫХ НАЗЕМНЫХ ХРАНИТЕЛЕЙ ВРЕМЕНИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537090C1 |
| СИСТЕМА ДЛЯ НАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ ОПАСНОГО УЧАСТКА МАГИСТРАЛЬНОГО ГАЗОПРОВОДА | 2006 |
|
RU2317471C1 |
| WO 2008138016 A1, 13.11.2008. | |||

