Изобретение относится к области регулирования движения дорожного транспорта, а именно к системам для выявления нарушений правил дорожного движения.
Из уровня техники известна система для выявления нарушений правил дорожного движения (US 2018224539 A1, опубл. 09.08.2018), содержащая выполненные с возможностью обмена данными по меньшей мере одну стационарную радарную установку и центр управления, который предназначен для хранения и обработки материалов доказательной базы нарушений. Радарная установка включает блок сбора фото- и видеоматериалов, выполнена с возможностью распознавания и фиксации государственных регистрационных знаков (ГРЗ), измерения скоростей движения транспортных средств (ТС) и собственных координат по спутниковым навигационным данным, сравнения измеренных скоростей с заранее сохранённой оператором максимальной разрешённой скоростью для данного участка местности и формирования материалов для доказательной базы нарушений в случае превышения ТС скорости движения на более чем допустимую величину. Основной недостаток такого решения заключается в невозможности выявления нарушителей скоростного режима радарной установкой в движении, она способна работать только в стационарном виде.
В качестве прототипа выбрана система для выявления нарушений правил дорожного движения (CN 207835664 U, опубл. 07.09.2018), включающая передвижной патрульный комплекс, выполненный с возможностью определения собственных координат по спутниковым навигационным данным, сбора и хранения для формирования доказательной базы нарушений фото- и видеоматериалов, распознавания и фиксации ГРЗ, измерения скоростей движения ТС, сравнения измеренных скоростей с заранее сохранённой пользователем максимальной разрешённой для данного участка местности, и формирования материалов для доказательной базы нарушений в случае превышения ТС скорости на более чем допустимую величину. Недостатки прототипа заключаются в отсутствии автоматической передачи данных на удалённый центр управления для их хранения и обработки, а также невозможности работы патрульного комплекса в движении – для каждого участка местности необходим ввод информации о максимальной разрешённой скорости.
Задачей изобретения является создание технического решения, лишённого недостатков прототипа.
Технический результат заключается в автоматическом выявлении нарушителей скоростного режима патрульным комплексом в движении для участков местности с разной максимальной разрешённой скоростью.
Указанный результат достигается за счёт того, что система для выявления нарушений правил дорожного движения включает выполненные с возможностью обмена данными по меньшей мере один передвижной патрульный комплекс и центр управления, который в свою очередь выполнен с возможностью формирования базы данных с координатами зон максимальных разрешённых скоростей, а также хранения и обработки материалов доказательной базы нарушений.
Патрульный комплекс при этом выполнен с возможностью сбора в движении фото- и видеоматериалов, распознавания и фиксации ГРЗ, измерения скоростей движения ТС и их координат по спутниковым навигационным данным относительно собственных, определения максимальной разрешённой скорости для участков местности, в которых находятся ТС, путём сравнения координат ТС с координатами зон разрешённых скоростей, хранящимися в соответствующей базе данных, затем сравнения измеренных скоростей с максимальными разрешёнными для данных участков, и формирования материалов для доказательной базы нарушений в случае превышения по меньшей мере одним ТС скорости на более чем допустимую величину.
Патрульный комплекс также выполнен с возможностью автоматического определения факта пересечения ТС сплошных линий, нарушений правил проезда перекрестков и правил парковки, а также осуществления поиска сведений о ТС по ГРЗ.
Благодаря тому, что патрульный комплекс вычисляет координаты ТС относительно собственных по спутниковым навигационным данным и обращается к базе данных с координатами зон, которым присвоены максимальные разрешённые скорости в центре управления, для определения того, в зонах действия каких максимальных разрешённых скоростей находятся ТС, удаётся в автоматическом режиме выявлять нарушителей скоростного режима в движении по любому участку местности.
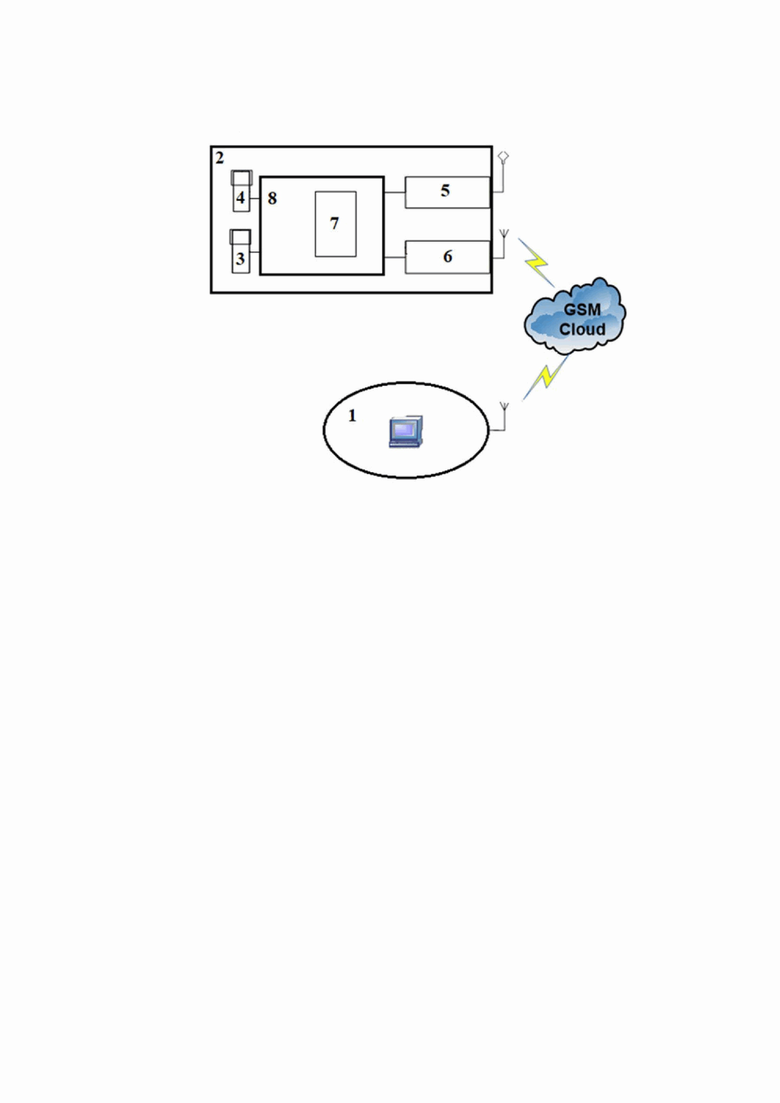
Изобретение поясняется с помощью чертеже, на которой показана схема основных элементов системы по предпочтительному варианту осуществления.
Предлагаемая система для выявления нарушений правил дорожного движения включает центр управления 1 и по меньшей мере один передвижной патрульный комплекс 2, представляющий собой патрульный автомобиль с установленными в салоне и/или на внешней поверхности по меньшей мере следующими связанными устройствами: блоком сбора фото- и видеоматериалов 3, радарной установкой 4, модулем спутниковой навигации 5, обеспечивающим приём навигационных данных от одной или нескольких систем из следующих: GPS, ГЛОНАСС, Galileo, Beidou, модулем связи 6 с центром управления 1, обеспечивающим безопасную передачу данных (шифрование и сетевое экранирование) по одному или нескольким каналам из следующих: GSM, 3G, 4G или 5G, блоком памяти 7 и компьютерным блоком 8, связанным с перечисленными элементами патрульного комплекса 2, осуществляющим управление ими и обработку поступающих данных. Корпус компьютерного блока 8 при осуществлении изобретения может включать в себя один или несколько элементов из следующих: блок памяти 7, модуль 5 и модуль 6. Также все упомянутые элементы могут быть внешними по отношению к блоку 8.
Центр управления 1 представляет собой удалённый центр мониторинга и управления движением, содержит одно или более рабочих мест операторов, сервер для хранения данных и блок связи, обеспечивающий безопасной обмен данными с одним или несколькими патрульными комплексами 2. Центр управления 1 также может быть реализован с возможностью обмена данными с вышестоящими информационными системами мониторинга дорожного движения, например информационными системами ЦАФАП и др.
Центр управления 1 осуществляет формирование базы данных с географическими координатами зон максимальных разрешённых скоростей, а также хранение и обработку материалов доказательной базы нарушений, таких как фото- и видеоматериалы, данные о времени и месте фотовидеофиксации, измеренной скорости, буквенно-цифрового обозначения распознанного номера ГРЗ. Центр управления 1 также способен отслеживать местоположения входящих в состав системы патрульных автомобилей 2 и получать информацию о текущем статусе элементов комплекса.
Патрульный комплекс 2 выполнен с возможностью сбора фото- и видеоматериалов за счёт того, что соответствующий блок 3 оснащён по меньшей мере одним видеодатчиком, представляющим собой, например, IP-камеру или другую, применение которой в данном случае будет очевидно для специалиста. Блок 3 предназначен для получения фото- и видеоматериалов участников дорожного движения и дорожной обстановки, распознавания и фиксации ГРЗ, а также по преимущественному варианту осуществления построения треков проезжающих ТС для определения факта пересечения ТС сплошных линий, нарушений правил проезда перекрестков и правил парковки.
Измерение скоростей движения ТС осуществляется посредством радарной установки 4 по предпочтительному варианту осуществления, т.к. комплекс 2 может быть реализован и без радара 4. Видеодатчик при этом связан с установкой 4 и обеспечивает получение фото- и видеоматериалов в поле её видимости. Блок 3 также может быть оснащён одной или более обзорными камерами, не связанными с радаром 4. Такой вариант известен из светосигнальных установок кругового обзора для патрульных ТС.
При реализации безрадарного патрульного комплекса 2 измерение скорости происходит посредством анализа данных, формируемых блоком сбора фото- и видеоматериалов 3.
Модуль спутниковой навигации 5 предназначен для отслеживания патрульным комплексом своих текущих географических координат по сигналам с по меньшей мере одной спутниковой навигационной системы. Модуль 5 включает в себя приёмник спутниковой навигации ГЛОНАСС / GPS / Galileo / Beidou, посредством которого патрульный комплекс 2 с точностью до нескольких метров определяет своё местоположение. По данным радарной установки 4 по предпочтительному варианту осуществления известны расстояния до ТС, находящихся в поле видимости радара. Далее компьютерный блок 8, применяя формулы перевода метрических данных в геолокационные, к текущим координатам добавляет поправку на расстояния до ТС и таким образом получает координаты всех ТС в поле видимости.
Блок памяти 7 хранит базу данных с координатами зон максимальных разрешённых скоростей, полученную с центра управления 1 и регулярно обновляемую, а также материалы доказательной базы нарушений, как правило – это полученные блоком 3 фото- и видеоматериалы и данные от радара 4.
Компьютерный блок 8 по уже известным координатам ТС обращается к базе данных зон и выявляет максимальные разрешённые скорости, действующие на участках местности, в которых находятся ТС в момент измерения их скоростей. Затем сравнивает измеренные скорости с максимальными разрешёнными для соответствующих участков и учитывает допустимую величину превышения. В случае факта нарушения скоростного режима – формирует материалы для доказательной базы нарушений.
В рамках данного изобретения под участком местности понимается территория с некоторым действующим скоростным ограничением, на которой находится одно или несколько ТС. А под зоной понимается обозначенная оператором центра управления 1 область с общим скоростным ограничением, так, например, границы некоторых зон совпадают с границами населённых пунктов, и соответственно каждая такая зона охватывает несколько участков местности с разными скоростными ограничениями внутри населённого пункта. В случае, например, если участок местности относится к полосе движения с увеличенной разрешённой скоростью или дворовой территории, то границы соответствующей зоны будут проходить по границам такого участка. Таким образом зона населённого пункта включает в себя несколько зон с другими скоростными ограничениями.
Ниже приведено описание работы изобретения.
Один или несколько патрульных комплексов 2 передвигаются по различным участкам дорог, ведут измерение скоростей других участников движения и осуществляют контроль соблюдения других правил дорожного движения по преимущественно варианту осуществления – определяют факт пересечения ТС сплошных линий, нарушения правил проезда перекрестков и правил парковки, а также осуществляют поиск сведений о ТС по их ГРЗ. При этом комплексы – автомобили 2 постоянно поддерживают связь с центром управления 1.
Компьютерный блок 8 патрульного автомобиля 2 вычисляет координаты ТС в поле видимости и обращается к базе данных с координатами зон, хранящейся в блоке памяти 7, для выявления скоростных ограничений, действующих на участках местности, в которых находятся ТС в момент измерения их скоростей.
База данных зон, сформированная оператором в центре управления 1, представляет собой массив табличных записей, содержащих наборы из координатных точек и данных о принадлежности этих точек конкретной зоне. Формируют каждую зону при этом путём нанесения на карту не менее трёх точек, образующих замкнутую фигуру, с их привязкой к географическим координатам и указанием максимальной разрешённой скорости для образованной точками фигуры, являющейся упомянутой зоной. Так, например, может быть задана зона с границами населённого пункта, и указано скоростное ограничение в 60 км/ч. Внутри этой зоны или на пересечении создаются другие зоны со своими скоростными ограничениями. Сформированная база данных зон передаётся входящим в состав системы патрульным комплексам 2, а также регулярно обновляется при наличии связи.
После соотнесения координат всех ТС с координатами зон и выявления скоростного режима для участков местности, в которых находятся упомянутые ТС, компьютерный блок 8, предварительно получив результаты измерений их скорости, осуществляет сравнение этих измеренных скоростей с максимальными разрешёнными скоростями в конкретных зонах, к которым относятся координаты ТС. При этом возможна ситуация, в которой несколько измеряемых ТС находятся в разных участках местности, входящих в зоны разных скоростных ограничений, и происходит выполнение сравнения скорости каждого ТС с соответствующей максимальной разрешённой скоростью в зоне его нахождения.
Также может быть реализован учёт погрешности нанесения границы зоны скоростного ограничения в 10-15 м. То есть ТС, вошедшие на 10 м в зону с меньшей разрешённой скоростью с нарушением её скоростного режима, но соблюдением режима внешней или предыдущей зоны, не рассматриваются с целью дальнейшего формирования материалов доказательной базы нарушений.
Описанное выше позволяет патрульным комплексам 2 в автоматическом режиме определять скоростной режим для текущего участка местности и выявлять нарушителей в движении по различным автомобильным дорогам без постоянного ручного ввода максимальной разрешённой скорости.
При сравнении скоростей учитывают допустимое превышение, необлагаемое штрафным взысканием, то есть к максимальной разрешённой для данной зоны скорости прибавляют допустимую величину превышения, и такая полученная скорость сравнивается с измеренной. В случае, если измеренная скорость оказалась выше, то компьютерный блок 8 инициирует формирование материалов для доказательной базы нарушений – записывает фото- и/или видеоматериалы на нарушителя, распознанные ГРЗ, данные о скорости и другое. Эти материалы посредством модуля связи 6 затем передаются в центр управления 1 для дальнейшей обработки.
Патрульный комплекс 2 помимо определения превышения скорости способен также автоматически определять пересечение ТС сплошных линий, нарушений правил проезда перекрестков и правил парковки, а также осуществлять поиск сведений о ТС по ГРЗ в соответствующих базах и выдавать результаты поиска патрульному и/или на центр управления 1. В случае выявления таких нарушений комплекс 2 также приступает к формированию материалов для доказательной базы нарушений.
Изобретение реализуется посредством известных и очевидных для специалиста в данной области техники средств и методов. Ниже приведён пример осуществления системы для выявления нарушений правил дорожного движения на известном из уровня техники оборудовании.
Компьютерный блок 8 представляет собой компьютер форм-фактора Mini-ITX или Pico ITX на базе процессора Pentium i5 и выше, спутниковые данные принимаются навигационным блоком роутера – модуль спутниковой навигации 5 – iRZ RU22W. Модуль связи 6 реализован в GSM модуле этого роутера с обеспечением передачи данных по мобильной сети. Блок памяти 7 встроен в компьютер 8 и представляет собой SSD диск размером 1Tb.
Блок сбора фото- и видеоматериалов 3 включает камеры Beward серии SV, а в качестве радарной установки 4 используется 4D-радар Smartmicro type 132.
Центр управления 1 рассчитан на 32 патрульных комплекса 2 и выполнен в виде сервера Dell R740. А в качестве APN сервера – точки доступа GSM для сервера 1 используется роутер MikroTik ltAP LTE6 kit.
Приведённым примером не исключается использование альтернативных элементов, обеспечивающих работоспособность изобретения и достижение технического результата, применение которых будет очевидно для специалиста.
Таким образом, предлагаемая система позволяет автоматически выявлять нарушителей скоростного режима патрульным комплексом в движении по участкам местности с разной максимальной разрешённой скоростью.
Изобретение относится к области регулирования движения дорожного транспорта. Система для выявления нарушений правил дорожного движения включает выполненные с возможностью обмена данными по меньшей мере один передвижной патрульный комплекс и центр управления, который в свою очередь выполнен с возможностью формирования базы данных с координатами зон максимальных разрешённых скоростей по спутниковым навигационным данным, а также хранения и обработки материалов доказательной базы нарушений. Патрульный комплекс выполнен с возможностью сбора в движении фото- и видеоматериалов, распознавания и фиксации государственных регистрационных знаков, измерения скоростей движения транспортных средств и их координат по спутниковым навигационным данным относительно собственных, определения максимальной разрешённой скорости для участков местности, в которых находятся ТС, путём сравнения координат ТС с координатами зон разрешённых скоростей, хранящимися в соответствующей базе данных, затем сравнения измеренных скоростей с максимальными разрешёнными для данных участков, и формирования материалов для доказательной базы нарушений в случае превышения по меньшей мере одним ТС скорости на более чем допустимую величину. Достигается автоматическим выявлением нарушителей скоростного режима патрульным комплексом в движении. 4 з.п. ф-лы, 1 ил.
1. Система для выявления нарушений правил дорожного движения, включающая выполненные с возможностью обмена данными по меньшей мере один передвижной патрульный комплекс и центр управления,
причём центр управления выполнен с возможностью формирования базы данных с координатами зон максимальных разрешённых скоростей по спутниковым навигационным данным, а также хранения и обработки материалов доказательной базы нарушений, а
патрульный комплекс выполнен с возможностью сбора в движении фото- и видеоматериалов, распознавания и фиксации государственных регистрационных знаков (ГРЗ), измерения скоростей движения транспортных средств (ТС) и их координат по спутниковым навигационным данным относительно собственных, определения максимальной разрешённой скорости для участков местности, в которых находятся ТС, путём сравнения координат ТС с координатами зон разрешённых скоростей, хранящимися в соответствующей базе данных, затем сравнения измеренных скоростей с максимальными разрешёнными для данных участков, и формирования материалов для доказательной базы нарушений в случае превышения по меньшей мере одним ТС скорости на более чем допустимую величину.
2. Система по п.1, в которой патрульный комплекс выполнен с возможностью автоматического определения факта пересечения ТС сплошных линий, нарушений правил проезда перекрестков и правил парковки, а также осуществления поиска сведений о ТС по ГРЗ.
3. Система по п.1, в которой патрульный комплекс содержит радарную установку для измерения скоростей движения ТС.
4. Система по п.1, в которой центр управления выполнен с возможностью формирования базы данных с координатами зон максимальных разрешённых скоростей путем нанесения на карту не менее трёх точек, образующих замкнутую фигуру, с их привязкой к географическим координатам по спутниковым навигационным данным и указанием максимальной разрешённой скорости для образованной точками фигуры, являющейся упомянутой зоной.
5. Система по п.1, в которой патрульный комплекс выполнен с возможностью учёта погрешности границ зон максимальных разрешённых скоростей в 10-15 м путем прекращения рассмотрения ТС, превысивших скорость на более чем допустимую величину для одной зоны, но не превышающих для внешней или предыдущей зоны, с целью формирования материалов доказательной базы нарушений.
| НАВЕСНАЯ СТРЕЛА С ВАКУУМНЫМ ЗАХВАТОМ | 0 |
|
SU179452A1 |
| КОНТАКТНАЯ СИСТЕМА | 0 |
|
SU197714A1 |
| 0 |
|
SU160564A1 |

