Изобретение относится к силоизмерительной технике, в частности к способам определения силовых факторов, действующих на колеса транспортных средств, и может быть использовано при проведении испытаний колес автомобилей.
Известен способ измерения силовых факторов, действующих на колесо транспортного средства (патент РФ №2276777 кл. G01L 5/00; 5/16, 2006 г.), содержащий соединение ступицы и обода колеса измерительными балками, измерение величин, связанных с силовыми факторами, измерение направления и угла поворота колеса относительно транспортного средства и вычисление сил и моментов. При этом измеряют связанные с действующими силовыми факторами относительные перемещения обода и ступицы не менее чем для трех пар точек, лежащих на радиусах окружности с центром, совпадающим с геометрическим центром колеса, а суммарные силы и моменты, действующие на ступицу, вычисляют как векторную сумму всех составляющих сил и моментов. В качестве измерительных балок используют Г-образные балки и многокомпонентные датчики силовых воздействий.
Данный способ позволяет измерять направление и угол поворота колеса относительно транспортного средства и вычислять силы и моменты. Недостатком данного способа является невозможность при измерениях сил и моментов учета свойств шины колеса, взаимодействующей с ободом, а также отсутствие возможности измерения или вычисления перемещения в горизонтальной плоскости контактной точки приложения реакций опорной поверхности, которое влияет на устойчивость и управляемость автомобиля.
Наиболее близким по совокупности признаков из известных технических решений является принятый за прототип способ определения силовых факторов, действующих на колесо транспортного средства (патент РФ №2539847 кл. G01M 17/013; G01L 5/16, 2013 г.), содержащий соединение ступицы и обода колеса с балками, измерение величин, связанных с силовыми факторами, и вычисление сил и моментов, действующих на ступицу, при котором вычисляют связанные с действующими силовыми факторами перемещения контактной точки. При этом ступица колеса шарнирно установлена на горизонтальную раму, а на ось колеса воздействуют радиальным нагружающим силовым фактором, создающим радиальную нагрузку в плоскости вращения колеса, проходящую через геометрический центр колеса. Поворотная измерительная опорная площадка, имеющая возможность регулирования своего пространственного положения, взаимодействует с шиной колеса и создает в контактной точке нормальную реакцию опорной поверхности, пропорциональную радиальному нагружающему силовому фактору при отсутствии другого силового фактора, которую вычисляют из показаний датчика силовых воздействий.
К причинам, препятствующим достижению заданного технического результата, относятся: отсутствие возможности измерения или вычисления продольной и боковой относительно плоскости вращения колеса перемещений контактной точки и продольной и боковой реакций опорной поверхности, которые влияют на моделирование явления увода эластичного колеса при расчете устойчивости и управляемости автомобиля, а также отсутствие возможности изменения пространственного положения оси колеса, тоже влияющего на устойчивость и управляемость автомобиля, которые существенно влияют на сцепные свойства эластичного колеса с опорной поверхностью и, следовательно, данный способ имеет очень узкие функциональные возможности.
Задачей заявляемого способа является создание его новой измерительно-расчетной схемы.
Техническим результатом заявленного способа определения силовых факторов, действующих на колесо транспортного средства, является обеспечение возможности определения по всем координатам сил, действующих на испытуемое наклоненное или ненаклоненное колесо, и расчета по ним коэффициентов жесткостей шины, что приведет к существенному расширению функциональных возможностей способа.
Указанный технический результат достигается тем, что в способе определения силовых факторов, действующих на колесо транспортного средства, включающем соединение ступицы и обода колеса, измерение величин, связанных с силовыми факторами, и вычисление сил и моментов, действующих на ступицу, при котором вычисляют связанные с действующими силовыми факторами перемещения контактной точки, лежащей на радиусе окружности с центром, совпадающим с геометрическим центром колеса, и при котором ступица колеса шарнирно установлена на раму, а на ось колеса воздействуют радиальным нагружающим силовым фактором, создающим радиальную нагрузку в плоскости вращения колеса, проходящую через геометрический центр колеса с шиной, взаимодействующей с поворотной измерительной опорной площадкой, имеющей возможность регулирования своего пространственного положения и создающей в контактной точке нормальную реакцию опорной поверхности, пропорциональную радиальному нагружающему силовому фактору при отсутствии другого силового фактора, которую вычисляют из показаний датчика радиальных силовых воздействий, причем поворотная измерительная опорная площадка имеет возможность своего продольного перемещения, а ось колеса при его горизонтальной установке закреплена в вертикальной шарнирно-поворотной втулке, обеспечивая возможность изменения своего положения в продольной вертикальной плоскости, проходящей через геометрический центр колеса, и измерения продольного относительно плоскости вращения колеса перемещения поворотной измерительной опорной площадки, создающей в контактной точке продольную реакцию опорной поверхности, пропорциональную продольному нагружающему силовому фактору наклоненного колеса, которую определяют из показаний датчика продольных силовых воздействий, а при вертикальной установке колеса закреплена в горизонтальной шарнирно-поворотной втулке, обеспечивая возможность изменения своего положения в горизонтальной плоскости, проходящей через геометрический центр колеса, и измерения бокового относительно плоскости вращения колеса перемещения поворотной измерительной опорной площадки, создающей в контактной точке боковую реакцию опорной поверхности, пропорциональную боковому нагружающему силовому фактору наклоненного колеса, которую определяют из показаний датчика боковых силовых воздействий.
Благодаря тому, что измерительная опорная площадка имеет возможность своего продольного перемещения, а ось колеса при его горизонтальной установке закреплена в вертикальной шарнирно-поворотной втулке, обеспечивая возможность изменения своего положения в продольной вертикальной плоскости, проходящей через геометрический центр колеса, появляется возможность измерения продольного относительно плоскости вращения наклоненного колеса перемещения контактной точки и продольной реакции опорной поверхности, а также появляется возможность вычисления коэффициента продольной жесткости шины, в том числе наклоненного колеса, что существенно расширяет функциональные возможности способа.
Благодаря тому, что измерительная опорная площадка имеет возможность своего продольного перемещения, а ось колеса при его вертикальной установке закреплена в горизонтальной шарнирно-поворотной втулке, обеспечивая возможность изменения своего положения в горизонтальной плоскости, проходящей через геометрический центр колеса, появляется возможность измерения бокового относительно плоскости вращения наклоненного колеса перемещения контактной точки и боковой реакции опорной поверхности, а также появляется возможность вычисления коэффициента боковой жесткости шины, в том числе наклоненного колеса, что также существенно расширяет функциональные возможности способа.
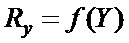
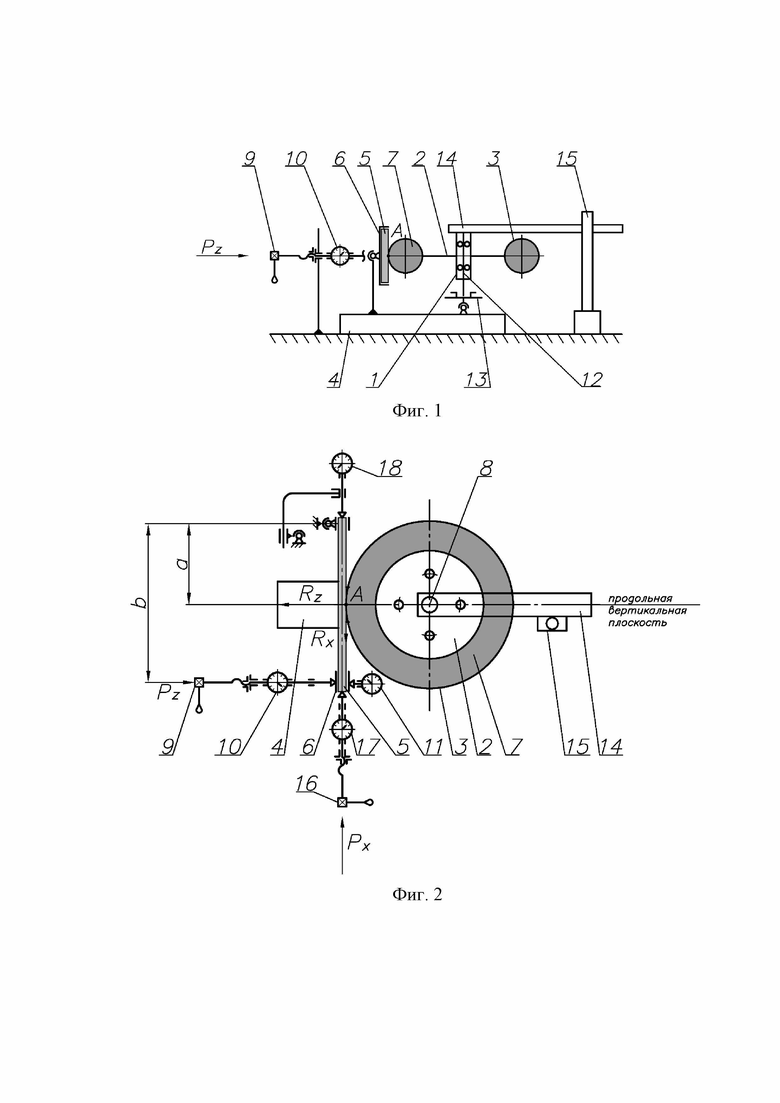
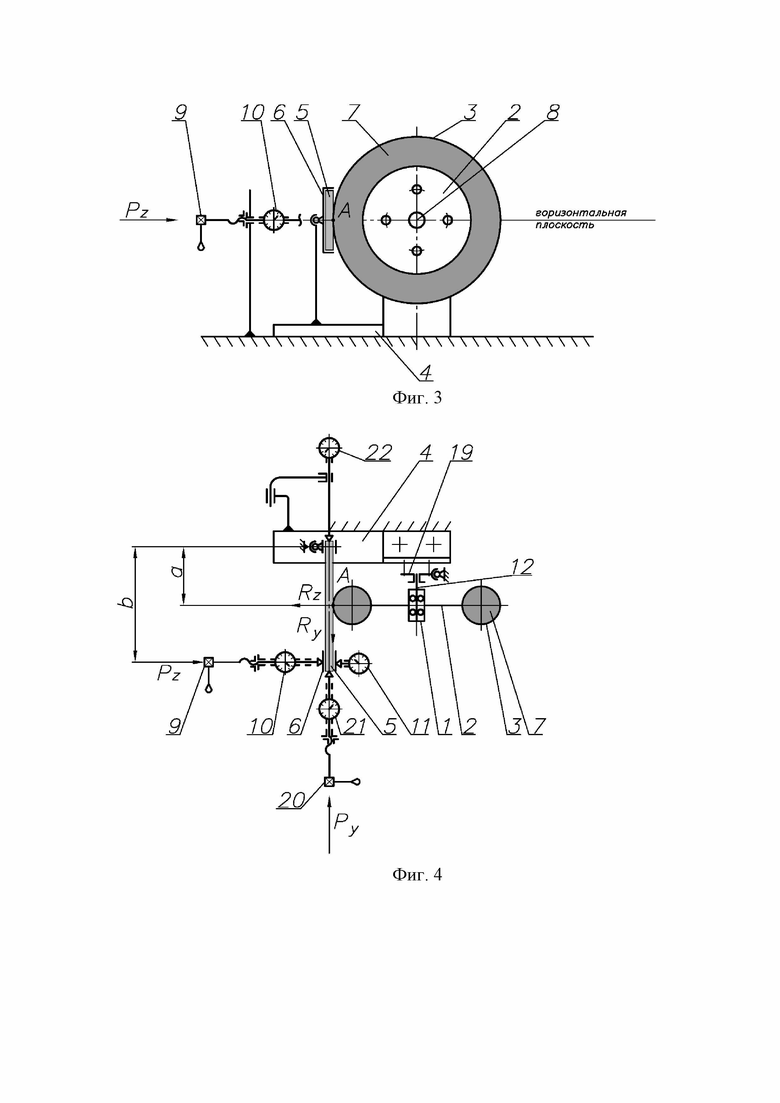
На фиг. 1, 2, 3, 4 изображены схемы, поясняющие способ определения силовых факторов, действующих на колесо транспортного средства. Схемы фиг. 1 и фиг. 2 соответствует горизонтальной установке колеса, а схемы фиг. 3 и фиг. 4 соответствует вертикальной установке колеса.
Ступица 1 с ободом 2 колеса 3 шарнирно установлена на неподвижную раму 4. На неподвижной раме 4 шарнирно установлена с возможностью регулирования своего пространственного положения поворотная измерительная опорная площадка 5. Поворотная измерительная опорная площадка 5 имеет возможность продольного перемещения вдоль своих направляющих 6. Она постоянно взаимодействует с шиной 7 колеса 3 для создания пятна контакта с центром в контактной точке А, лежащей на радиусе окружности с центром 8, совпадающим с геометрическим центром колеса 3, для обеспечения возможности воздействия на колесо 3 радиальным нагружающим силовым фактором для создания радиальной нагрузки 

В качестве первичного нагружающего силового фактора при любом расположении колеса 3 используется радиальный.
Для создания радиального нагружающего силового фактора предусмотрено устройство радиального нагружения 9 колеса 3, снабженное датчиком радиальных силовых воздействий 10 для определения нормальной реакции опорной поверхности. Из показаний датчика радиальных силовых воздействий 10 нормальная реакция опорной поверхности 
где 


Радиальные силовые воздействия на колесо 3 прямо пропорциональны радиальной деформации шины 7, для определения которой предусмотрен датчик радиальных перемещений 11, из показаний которого радиальная деформация 
где 
Значения полученных величин нормальной реакции опорной поверхности 
где 
Экспериментально-расчетное определение коэффициента нормальной (радиальной) жесткости
Колесо 3 может быть установлено двумя способами: горизонтально и вертикально.
При горизонтальной установке колеса 3 его ось 12 закреплена в вертикальной шарнирно-поворотной втулке 13, расположенной на неподвижной раме 4, для обеспечения возможности изменения своего положения в продольной вертикальной плоскости, проходящей через геометрический центр 8 колеса 3, и реализации наклона колеса 3.
В качестве вторичного нагружающего силового фактора при горизонтальном расположении колеса 3 используется продольный.
Благодаря тому, что при горизонтальной установке колеса 3 поворотная измерительная опорная площадка 5 имеет возможность своего продольного перемещения, обеспечивается осуществимость воздействия на колесо 3 продольным нагружающим силовым фактором для создания продольной нагрузки 

На ступице 1 горизонтально расположенного колеса 3 жестко закреплена поворотная балка 14, упирающаяся в неподвижную ограничительную опору 15, для исключения возможности проворачивания колеса 3 от воздействия продольного нагружающего силового фактора.
Для создания продольного нагружающего силового фактора предусмотрено устройство продольного нагружения 16 колеса 3, снабженное датчиком продольных силовых воздействий 17 для определения продольной реакции опорной поверхности.
Из показаний датчика продольных силовых воздействий 17 продольная реакция опорной поверхности 
где 

Продольные силовые воздействия на колесо 3 прямо пропорциональны продольной деформации 
Значения полученных величин продольной реакции опорной поверхности 
где 

Экспериментально-расчетное определение коэффициента продольной жесткости 
При вертикальной установке колеса 3 его ось 12 закреплена в горизонтальной шарнирно-поворотной втулке 19, расположенной на неподвижной раме 4, для обеспечения возможности изменения своего положения в горизонтальной плоскости, проходящей через геометрический центр 8 колеса 3, и реализации наклона колеса 3.
В качестве вторичного нагружающего силового фактора при вертикальном расположении колеса 3 используется боковой.
Благодаря тому, что при вертикальной установке колеса 3 поворотная измерительная опорная площадка 5 имеет возможность своего продольного перемещения, обеспечивается осуществимость воздействия на колесо 3 боковым нагружающим силовым фактором для создания боковой нагрузки 

Для создания бокового нагружающего силового фактора предусмотрено устройство бокового нагружения 20 колеса 3, снабженное датчиком боковых силовых воздействий 21 для определения боковой реакции опорной поверхности.
Из показаний датчика боковых силовых воздействий 20 боковая реакция опорной поверхности 
где 
Боковые силовые воздействия на колесо 3 прямо пропорциональны боковой деформации 
Значения полученных величин боковой реакции опорной поверхности 


где 

Экспериментально-расчетное определение коэффициента боковой жесткости 
Предлагаемый способ реализуется следующим образом.
На неподвижную раму 4 шарнирно устанавливают ступицу 1 с ободом 2 колеса 3. Колесо 3 устанавливают двумя способами: горизонтально и вертикально.
При горизонтальном способе колесо 3 устанавливают горизонтально, для чего его ось 12 закрепляют в вертикальной шарнирно-поворотной втулке 13, расположенной на неподвижной раме 4, тем самым обеспечивают возможность изменения положения оси 12 колеса 3 в продольной вертикальной плоскости, проходящей через геометрический центр 8 колеса 3, и обеспечивают требуемый наклона колеса 3 в продольной вертикальной плоскости. При этом способе установки колеса 3 на ступице 1 жестко закрепляют поворотную балку 14, упирающуюся в неподвижную ограничительную опору 15, тем самым исключают возможность проворачивания колеса 3 от воздействия продольного нагружающего силового фактора.
При вертикальном способе колесо 3 устанавливают вертикально, для чего его ось 12 закрепляют в горизонтальной шарнирно-поворотной втулке 19, расположенной на неподвижной раме 4, тем самым обеспечивают возможность изменения положения оси 12 колеса 3 в горизонтальной плоскости, проходящей через геометрический центр 8 колеса 3, и обеспечивают требуемый наклона колеса 3 в горизонтальной плоскости.
На неподвижную раму 4 также шарнирно устанавливают поворотную измерительную опорную площадку 5 с возможностью регулирования своего пространственного положения. Поворотная измерительная опорная площадка 5 постоянно взаимодействует с шиной 7 колеса 3 и тем самым создает пятно контакта с центром в контактной точке А, лежащей на радиусе окружности с центром, совпадающим с геометрическим центром 8 колеса 3, и обеспечивает возможность создания радиального, продольного или бокового нагружающих силовых факторов. При этом поворотная измерительная опорная площадка 5 неподвижна в своих направляющих 6.
Для реализации первичного нагружающего силового фактора – радиального – при любом способе расположения колеса 3 на устройство радиального нагружения 9 колеса 3 оказывают механическое воздействие, тем самым создают радиальную нагрузку
При этом поворотная измерительная опорная площадка 5 по-прежнему неподвижна в своих направляющих 6.
Значения радиальной деформации
Из полученных значений величин нормальной реакции опорной поверхности
Для реализации вторичного – продольного – нагружающего силового фактора при горизонтальном расположении колеса 3 на устройство продольного нагружения 16 колеса 3 оказывают механическое воздействие, тем самым создают продольную нагрузку
При этом поворотная измерительная опорная площадка 5 совершает продольное относительно плоскости колеса 3 перемещение в своих направляющих 6.
Значения продольной деформации 
Из полученных значений величин продольной реакции опорной поверхности 

Для реализации вторичного – бокового – нагружающего силового фактора при вертикальном расположении колеса 3 на устройство бокового нагружения 20 колеса 3 оказывают механическое воздействие, тем самым создают боковую нагрузку 

При этом поворотная измерительная опорная площадка 5 совершает боковое относительно плоскости колеса 3 перемещение в своих направляющих 6.
Значения боковой деформации 
Из полученных значений величин боковой реакции опорной поверхности 


Предлагаемый способ определения силовых факторов, действующих на колесо транспортного средства, реализует существенное расширение функциональных возможностей способа благодаря наличию в нем новой расчетно-измерительной схемы с новой схемой нагружения, обеспечивающей осуществимость измерения радиальных, продольных и боковых сил и перемещений контактной точки и определения радиального, продольного и бокового коэффициентов жесткости наклоненного или ненаклоненного колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения силовых факторов, действующих на колесо транспортного средства | 2020 |
|
RU2735295C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛОВЫХ ФАКТОРОВ, ДЕЙСТВУЮЩИХ НА КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2539847C1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| Стенд для динамических испытаний пневматической шины | 1983 |
|
SU1132177A1 |
| Стенд для испытания пневматических шин | 1981 |
|
SU1027567A1 |
| Стенд для испытания пневматических шин | 1985 |
|
SU1368696A1 |
| Стенд для определения углов установки управляемых колес транспортного средства | 1988 |
|
SU1654715A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛОВЫХ ФАКТОРОВ, ДЕЙСТВУЮЩИХ НА КОЛЕСО | 2003 |
|
RU2276777C2 |
| Транспортное средство и внутритрубный движитель динамического типа для него | 2017 |
|
RU2668367C1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
Поворотная измерительная опорная площадка имеет возможность своего продольного перемещения, а ось колеса при его горизонтальной установке закреплена в вертикальной шарнирно-поворотной втулке, обеспечивая возможность изменения своего положения в продольной вертикальной плоскости, проходящей через геометрический центр колеса, и измерения продольного относительно плоскости вращения колеса перемещения поворотной измерительной опорной площадки, создающей в контактной точке продольную реакцию опорной поверхности, пропорциональную продольному нагружающему силовому фактору наклоненного колеса, которую определяют из показаний датчика продольных силовых воздействий, а при вертикальной установке колеса ось закреплена в горизонтальной шарнирно-поворотной втулке, обеспечивая возможность изменения своего положения в горизонтальной плоскости, проходящей через геометрический центр колеса, и измерения бокового относительно плоскости вращения колеса перемещения поворотной измерительной опорной площадки, создающей в контактной точке боковую реакцию опорной поверхности, пропорциональную боковому нагружающему силовому фактору наклоненного колеса, которую определяют из показаний датчика боковых силовых воздействий. Технический результат - обеспечение возможности определения по всем координатам сил, действующих на испытуемое наклоненное или ненаклоненное колесо, и расчета по ним коэффициентов жесткостей шины, что приводит к расширению функциональных возможностей способа. 4 ил. 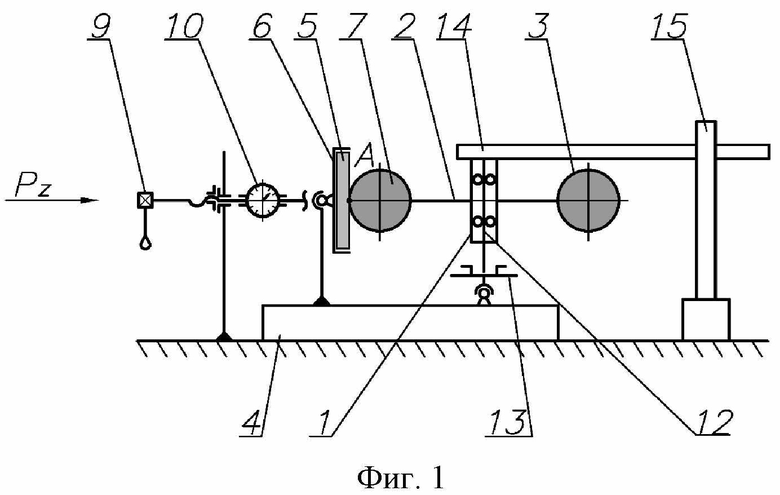
Способ определения силовых факторов, действующих на колесо транспортного средства, включающий соединение ступицы и обода колеса, измерение величин, связанных с силовыми факторами, и вычисление сил и моментов, действующих на ступицу, при котором вычисляют связанные с действующими силовыми факторами перемещения контактной точки, лежащей на радиусе окружности с центром, совпадающим с геометрическим центром колеса, и при котором ступица колеса шарнирно установлена на раму, а на ось колеса воздействуют радиальным нагружающим силовым фактором, создающим радиальную нагрузку в плоскости вращения колеса, проходящую через геометрический центр колеса с шиной, взаимодействующей с поворотной измерительной опорной площадкой, имеющей возможность регулирования своего пространственного положения и создающей в контактной точке нормальную реакцию опорной поверхности, пропорциональную радиальному нагружающему силовому фактору при отсутствии другого силового фактора, которую вычисляют из показаний датчика радиальных силовых воздействий, отличающийся тем, что поворотная измерительная опорная площадка имеет возможность своего продольного перемещения, а ось колеса при его горизонтальной установке закреплена в вертикальной шарнирно-поворотной втулке, обеспечивая возможность изменения своего положения в продольной вертикальной плоскости, проходящей через геометрический центр колеса, и измерения продольного относительно плоскости вращения колеса перемещения поворотной измерительной опорной площадки, создающей в контактной точке продольную реакцию опорной поверхности, пропорциональную продольному нагружающему силовому фактору наклоненного колеса, которую определяют из показаний датчика продольных силовых воздействий, а при вертикальной установке колеса ось закреплена в горизонтальной шарнирно-поворотной втулке, обеспечивая возможность изменения своего положения в горизонтальной плоскости, проходящей через геометрический центр колеса, и измерения бокового относительно плоскости вращения колеса перемещения поворотной измерительной опорной площадки, создающей в контактной точке боковую реакцию опорной поверхности, пропорциональную боковому нагружающему силовому фактору наклоненного колеса, которую определяют из показаний датчика боковых силовых воздействий.
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛОВЫХ ФАКТОРОВ, ДЕЙСТВУЮЩИХ НА КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2539847C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛОВЫХ ФАКТОРОВ, ДЕЙСТВУЮЩИХ НА КОЛЕСО | 2003 |
|
RU2276777C2 |
| US 7716996 B2, 18.05.2010. | |||

