ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к трехосевому магнитному датчику, используемому в качестве датчика азимута и т.п., и в частности, к детектору трехмерного магнитного поля, содержащему устройство для обнаружения трехмерного магнитного поля, имеющее функцию обнаружения магнитного поля в трех направлениях (ось х, ось у и ось z), причем упомянутое устройство, будучи реализованным на единой подложке, уменьшено по высоте и площади поперечного сечения, в то время как такие основные характеристики магнитного датчика как высокая чувствительность, низкий уровень шума и широкий диапазон измерения сохранены.
УРОВЕНЬ ТЕХНИКИ
[0002] Трехосевой магнитный датчик выполнен с возможностью измерения вектора земного магнетизма посредством трех элементов магнитного датчика для х, у и z осевых направлений, скомбинированных с интегральной схемой, причем этот датчик вычисляет азимут на основе значения измеренного вектора. Такой трехосевой магнитный датчик комбинируется с датчиком ускорения или вибрационным гироскопическим датчиком и, как таковой, используется в качестве трехмерного измерителя азимута в различных устройствах, таких как электронный компас, смартфон, планшетный терминал, удаленный контроллер для интернет-телевидения, игровой автомат с определением движения и устройство для захвата движения. В последние годы, требуется снижение размеров и толщин вышеупомянутых устройств, а также дальнейшее улучшение чувствительности, шумоподавления и диапазона измерения. При снижении толщины смартфонов, в частности, требуется, чтобы датчики азимута имели высоту на 40% или более, уменьшенную относительно обычной высоты в 1 мм, например, высоту 0,6 мм и размер на 50% или более, уменьшенный относительно обычного размера в 2 мм2, например, размер 1,5 мм2. Что касается шума, требуемая величина составляет 1 мg (0,00981 м/с2) или менее, то есть требуется десятикратное снижение шума или более по сравнению с обычной величиной в 10 мg (0,0981 м/с2).
[0003] В датчике азимута, элемент Холла, магниторезистивный элемент, магнитоимпедансный элемент (МИ), элемент спинового вращения с ГГц угловой скоростью (GHz Spin Rotation (GSR)) или т.п. используются в качестве элемента для обнаружения магнитного поля. Обычно, три элемента (один на ось х, один на ось у и один на ось z) используются для измерения напряженности компоненты Нх вектора магнитного поля по оси х, напряженности компоненты Ну вектора магнитного поля по оси у и напряженности компоненты Hz вектора магнитного поля по оси z, соответственно. Если используются элементы Холла, обнаруживающие магнитное поле в направлении, перпендикулярном лицевой стороне устройства, то элемент по оси z необходимо располагать на лицевой стороне устройства, в то время как элементы по осям х и у должны быть смонтированы прямостоящими на подложке датчика. В случае магниторезистивных элементов элементов, МИ элементов и т.п., обнаруживающих магнитное поле параллельное лицевой стороне устройства, элементы по осям х и у располагают на лицевой стороне устройства, в то время как элемент по оси z должен быть смонтирован прямостоящим (в направлении оси z) на подложке датчика. Отсюда возникает проблема с увеличением высоты датчика, поскольку все три элемента используются в собранном виде. В качестве примера, патентная литература [1] раскрывает собранный трехосевой магнитный датчик использующий МИ датчики. Следует обратить внимание на то, что в данном документе обсуждаются МИ элементы и элементы GSR, поскольку элементы Холла имеют высокий уровень шума и их трудно улучшить в плане производительности.
[0004] Что касается проблемы описанной выше, патентная литература [2] раскрывает интегральное устройство для обнаружения трехмерного магнитного поля, содержащее элементы по оси х и элементы по оси у, установленные на одной подложке и имеющие функцию элемента по оси z. Раскрытое устройство представляет собой устройство для обнаружения трехмерного магнитного поля, в котором пара элементов по оси х, а именно, осевой элемент XI и осевой элемент Х2, и пара элементов по оси у, а именно, осевой элемент Y1 и осевой элемент Y2, расположены в направлениях осей х и у на лицевой стороне подложки, соответственно, так чтобы образовать пересечение, а стержень сердечника из пермаллоя выполнен ниже центра пересечения. Устройство для обнаружения трехмерного магнитного поля, как упомянуто выше, обнаруживает магнитное поле в направлении оси х путем сложения выходного сигнала от осевого элемента XI и выходного сигнала от осевого элемента Х2, обнаруживает магнитное поле в направлении оси у путем сложения выходного сигнала от осевого элемента Y1 и выходного сигнала от осевого элемента Y2, и обнаруживает магнитное поле в направлении оси z путем отклонения магнитного поля в направлении оси z с использованием стержня сердечника из пермаллоя так, чтобы сгенерировать отклоненную компоненту в направлении плоскости, и путем сложения отклоненной компоненты с разностью между выходным сигналом от осевого элемента XI и выходным сигналом от осевого элемента Х2, и с разностью между выходным сигналом от осевого элемента Y1 и выходным сигналом от осевого элемента Y2 так, чтобы получить вектор трехмерного магнитного поля. Однако, сила стержня сердечника из пермаллоя, которая должна вызывать отклонение в направлении плоскости магнитного поля в направлении оси z является очень малой. Следовательно, устройство для обнаружения трехмерного магнитного поля нуждается в более длинном стержне из пермаллоя с  диаметром и может иметь толщину 0,5 мм или больше, что делает это устройство непрактичным.
диаметром и может иметь толщину 0,5 мм или больше, что делает это устройство непрактичным.
[0005] Патентная литература [3], в которой элементы, по типу МИ элемента, дополнительно улучшены по размерам, раскрывает устройство для обнаружения трехмерного магнитного поля, в котором каждое из двух магнитомягких тел предусмотрено на конце МИ элемента, одно тело выше одного конца, а другое тело ниже другого конца, что говорит о том, что магнитная цепь в виде заводной рукояти образуется с использованием двух магнитомягких тел и одного элемента так, чтобы обеспечить эффективное обнаружение магнитного поля в направлении оси z. В конфигурации раскрытого устройства четыре МИ элемента установлены на плоской лицевой стороне подложки вокруг начала координат подложки так, что два из них могут быть расположены в направлении оси х, а остальные два могут быть на оси у, пересекающей ось х. В подложке ниже начала координат и выше концов четырех МИ элементов, каждый из которых расположен противоположно началу координат, расположены магнитомягкие тела так, чтобы образовать магнитную цепь, содержащую элементы для обнаружения магнитного поля и магнитомягкие тела. Такая конфигурация привела к созданию устройства для обнаружения трехмерного магнитного поля, имеющего ширину 0,7 мм, длину 0,7 мм и толщину 0,3 мм.
[0006] Однако, тем не менее, требуется еще большее снижение размеров и толщины для применения современного датчика азимута в носимом компьютере, наконечнике направляющего провода медицинского катетера и так далее. Каждый из компонентов магнитного поля по оси х и по оси у получен путем сложения измеренных значений от правого и левого элементов для обнаружения магнитного поля, а компонент магнитного поля по оси z получен путем вычисления разности между измеренными значениями от правого и левого элементов для обнаружения магнитного поля. Следовательно, требуется, чтобы правый и левый элементы для обнаружения магнитного поля выдавали одинаковое значение по отношению к одному и тому же направлению, а для магнитных полей в противоположных направлениях выдавали значения, которые одинаковы по величине, но противоположны по знаку, таким образом, структурная симметрия является очень важной. Поскольку элементы для обнаружения магнитного поля более сложны, даже небольшая разница между правым и левым элементами является критичной.
СПИСОК ЦИТИРОВАННОЙ ПАТЕНТНОЙ ЛИТЕРАТУРЫ
[0007] Патентная литература 1: WO 2005/008268.
Патентная литература 2: WO 2010/110456.
Патентная литература 3: JP 2014-153309 А.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ ТЕХНИЧЕСКИЕ ПРОБЛЕМЫ
[0008] Принимая во внимание технические предпосылки, описанные выше, автор настоящего изобретения сосредоточил свое внимание на датчике GSR, который был разработан недавно. Установка элементов для обнаружения магнитного поля на лицевой стороне подложки, структура, собирающая магнитное поле, для магнитного поля в направлении оси z, и расположение магнитомягких тел были изучены не только для улучшения способности обнаружения магнитного поля, но и для пересмотра размеров устройства для обнаружения трехмерного магнитного поля. Настоящее изобретение построено на всех этих особенностях.
РЕШЕНИЕ ПРОБЛЕМ
[0009] Автор настоящего изобретения исследовал дальнейшее уменьшение размеров устройства для обнаружения трехмерного магнитного поля, как раскрыто в патентной литературе [3], и, в результате, разработал структуру, использующую три элемента для обнаружения магнитного поля вместо четырех. Эта структура делает возможным измерение магнитного поля в первом осевом направлении посредством двух элементов 12 и 13 для первого осевого направления, измерение магнитного поля во втором осевом направлении посредством одного элемента 14, расположенного в начале координат, и измерение магнитного поля в третьем осевом направлении путем объединения двух элементов для первого осевого направления с тремя магнитомягкими телами для образования с точечной симметрией двух магнитных цепей в виде заводных рукоятей, причем первое, второе и третье осевые направления перпендикулярны друг другу в начале координат как центре измерения.
[0010] Магнитное поле Нх в направлении оси х получается от среднего значения измеренных значений от элементов 12 и 13, соответственно. Магнитное поле Ну в направлении оси у получается от измерения посредством элемента 14. Магнитное поле Hz в направлении оси z получается от среднего значения разницы между измеренными значениями от элементов 12 и 13, соответственно. Для уменьшения размеров в качестве элементов 12 и 13 используются элементы с меньшими длинами, чтобы уменьшить длину в продольном направлении так, чтобы суммарный выходной сигнал двух элементов 12 и 13 мог быть таким же, как чувствительность элемента 14 в качестве эталона. Элементы 12 и 13 с меньшими длинами позволяют магнитным цепям иметь меньшее магнитное сопротивление, а изменение размеров магнитомягких тел позволяет не только выровнять чувствительность обнаружения в направлении оси z с чувствительностью элемента 14, но и уменьшить размеры в направлении толщины. В результате использования высокочувствительных элементов GSR для уменьшения длины, все устройство было уменьшено в размерах.
ОБЕСПЕЧИВАЕМЫЕ ИЗОБРЕТЕНИЕМ ТЕХНИЧЕСКИЕ РЕЗУЛЬТАТЫ
[0011] Согласно настоящему изобретению, использование элементов GSR позволяет устройству для обнаружения трехмерного магнитного поля иметь уменьшенный размер и толщину при сохранении таких основных характеристик как высокая чувствительность, низкий шум и широкий диапазон измерения. Уменьшение числа элементов для обнаружения магнитного поля приводит к снижению стоимости. В дополнение, возможно уменьшение размеров и толщины детектора трехмерного магнитного поля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
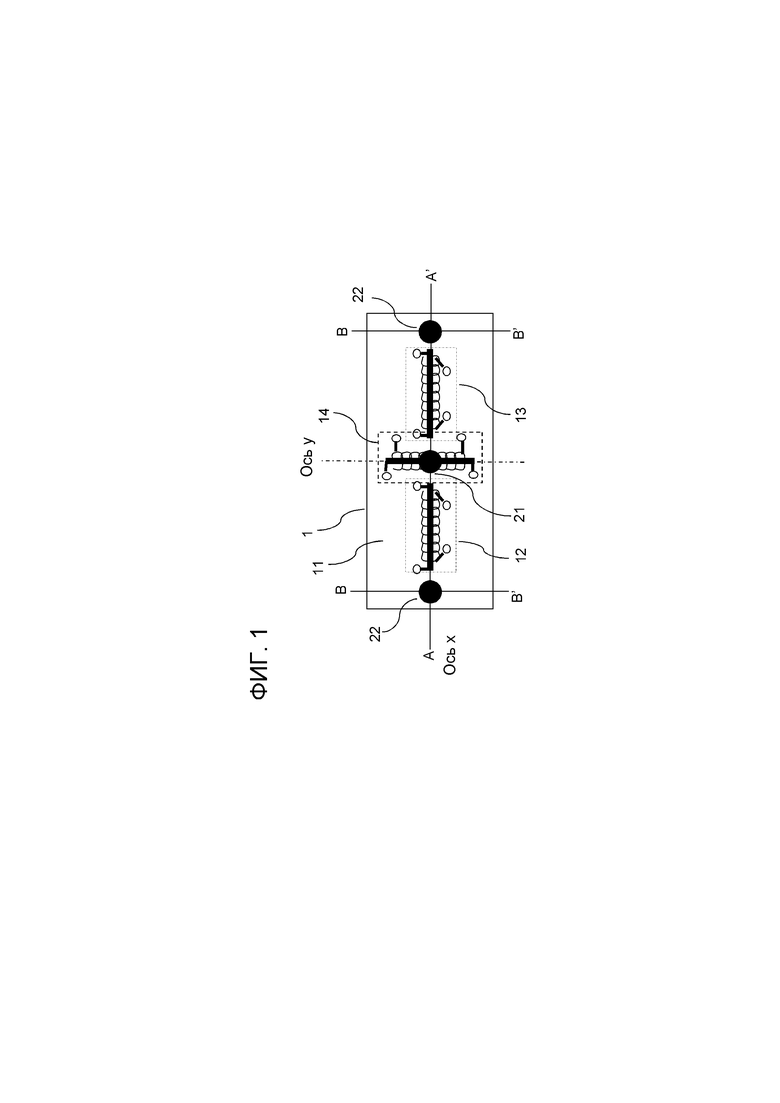
[0012] ФИГ. 1 представляет собой вид сверху на устройство для обнаружения трехмерного магнитного поля в соответствии с вариантом осуществления 1.
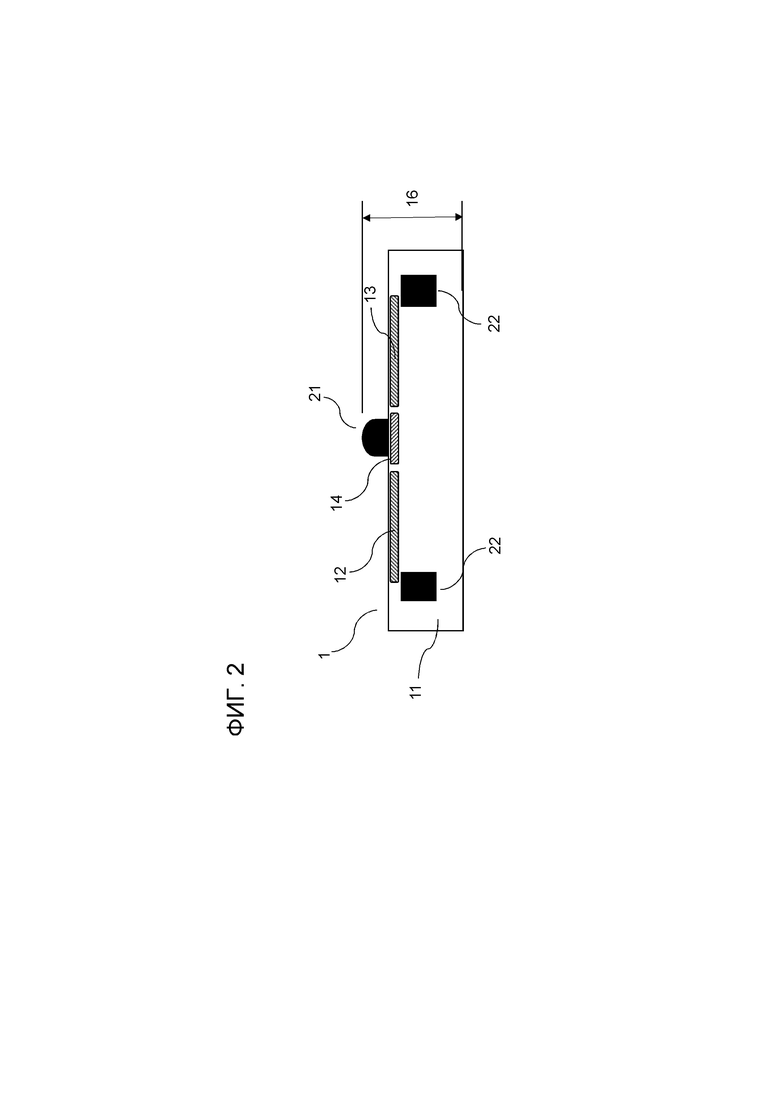
ФИГ. 2 представляет собой вид поперечного сечения устройства для обнаружения трехмерного магнитного поля в соответствии с вариантом осуществления 1, взятый вдоль линии А-А' на виде сверху (ФИГ. 1).
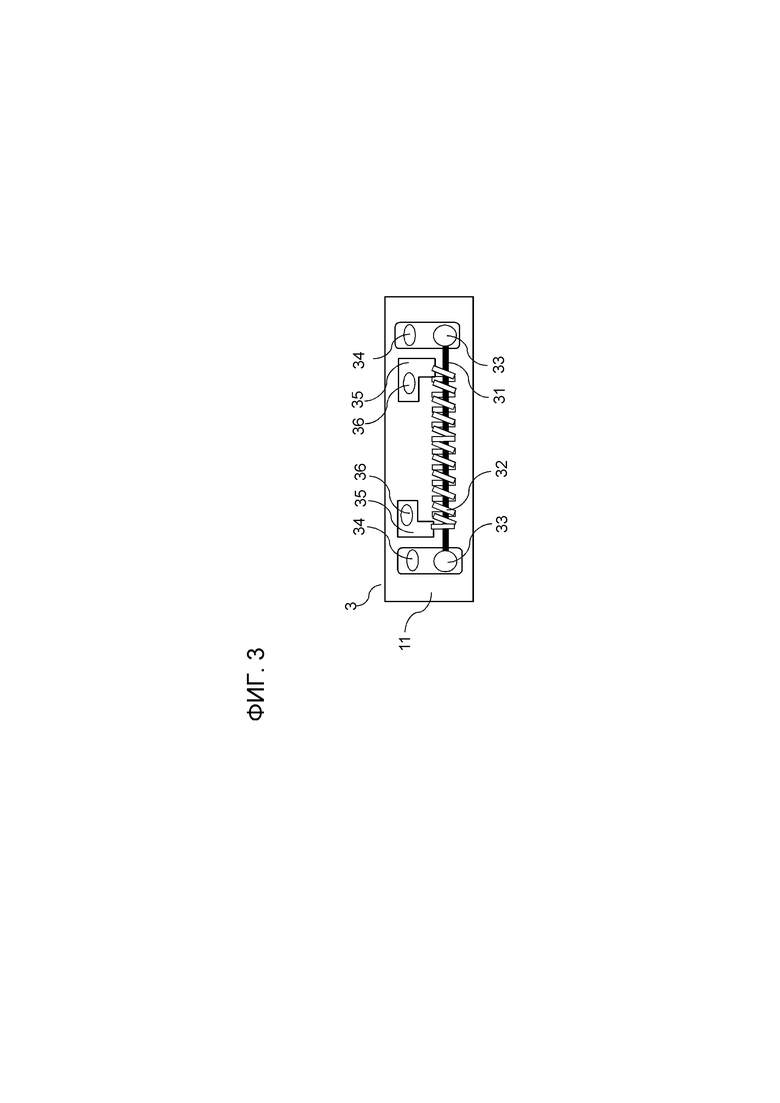
ФИГ. 3 представляет собой схематический вид сверху, показывающий базовую структуру элемента GSR в соответствии с вариантом осуществления 1.
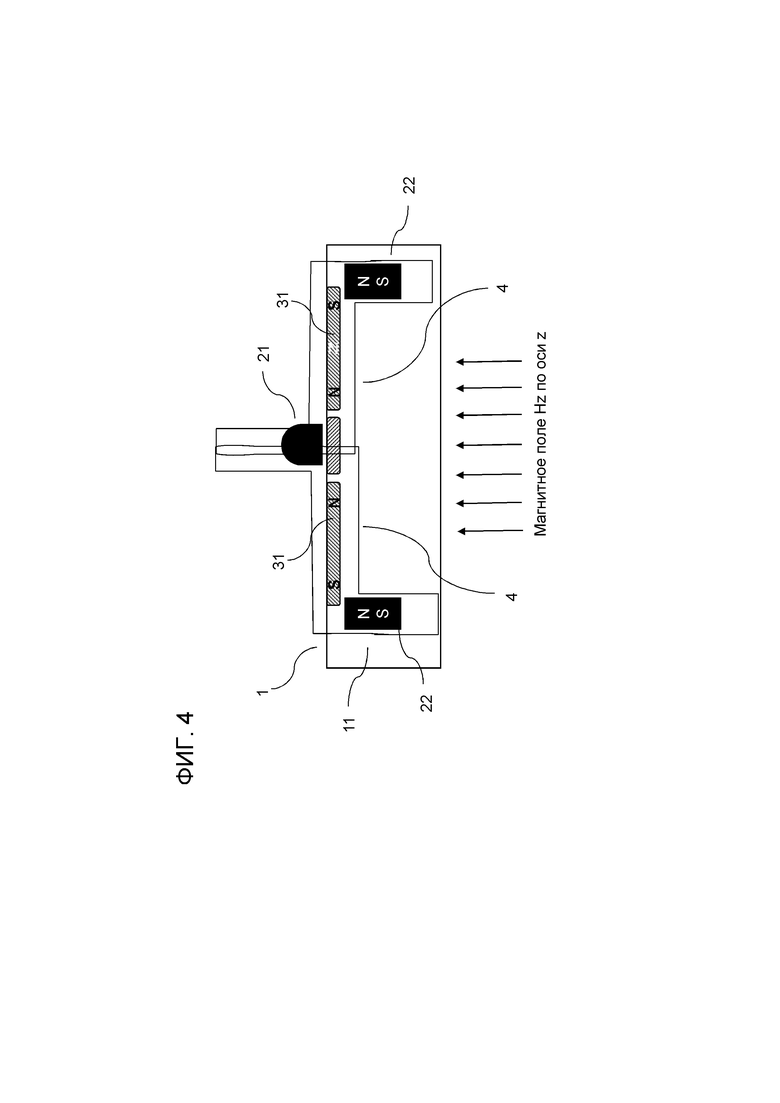
ФИГ. 4 представляет собой схематическое изображение, показывающее магнитные цепи в виде заводной рукояти в соответствии с вариантом осуществления 1.
ФИГ. 5 представляет собой электронную схему элемента для обнаружения магнитного поля в соответствии с вариантом осуществления 1.
ФИГ. 6 представляет собой электронную схему устройства для обнаружения трехмерного магнитного поля в соответствии с вариантом осуществления 1.
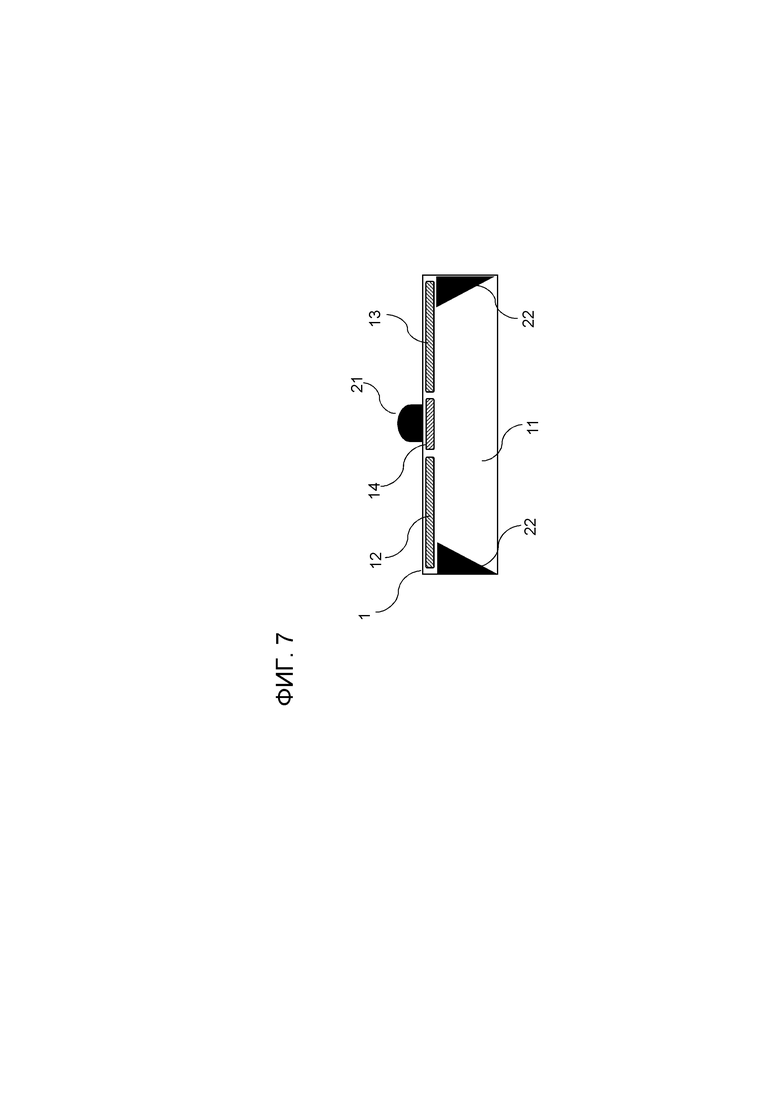
ФИГ. 7 представляет собой вид поперечного сечения устройства для обнаружения трехмерного магнитного поля в соответствии с вариантом осуществления 2, взятый вдоль линии В-В' на виде сверху (ФИГ. 1).
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0013] Согласно настоящему изобретению, устройство для обнаружения трехмерного магнитного поля содержит элементы для обнаружения магнитного поля, выполненные с возможностью обнаружения магнитного поля в направлении, параллельном лицевой стороне подложки и магнитомягкие тела, выполненные с возможностью сбора и излучения магнитного поля, перпендикулярного лицевой стороне подложки. Ось, проходящая в первом осевом направлении на лицевой стороне подложки, ось, проходящая во втором осевом направлении, перпендикулярном первому осевому направлению, и ось, проходящая в третьем осевом направлении, перпендикулярном лицевой стороне подложки, пересекаются друг с другом в начале координат как центре измерения магнитного поля на лицевой стороне подложки. Элементы для обнаружения магнитного поля установлены на подложке так, что два элемента для обнаружения магнитного поля расположены в первом осевом направлении с точечной симметрией относительно начала координат, установленного в качестве центра симметрии, а один элемент для обнаружения магнитного поля расположен во втором осевом направлении с точечной симметрией относительно начала координат как центра симметрии, и магнитомягкие тела расположены выше начала координат и ниже концов двух элементов для обнаружения магнитного поля, расположенных в первом осевом направлении, причем каждый из упомянутых концов противоположен началу координат. Магнитная цепь, включающая два элемента для обнаружения магнитного поля и три магнитомягких тела, образована в первом осевом направлении.
[0014] Устройство для обнаружения трехмерного магнитного поля содержит три элемента для обнаружения магнитного поля для обнаружения магнитного поля в направлении, параллельном лицевой стороне подложки, и три магнитомягких тела. Каждый элемент для обнаружения магнитного поля состоит из аморфной проволоки в качестве магниточувствительного тела, катушки обнаружения, намотанной вокруг указанной аморфной проволоки, выводов на обоих концах аморфной проволоки и катушки обнаружения, контактных площадок электродов для связи выводов друг с другом или с внешней интегральной схемой, и проводников между выводами и электродами.
[0015] Диаметр аморфной проволоки составляет 15 мкм или менее, предпочтительно 10 мкм или менее. Периферия аморфной проволоки предпочтительно покрыта изолирующим материалом, например стеклом. Аморфную проволоку и катушку обнаружения легко изолировать друг от друга, а зазор между ними может быть снижен для уменьшения внутреннего диаметра катушки. Внутренний диаметр катушки обнаружения составляет 30 мкм или менее, предпочтительно 20 мкм или менее. Уменьшение внутреннего диаметра катушки обнаружения улучшает чувствительность. Шаг намотки катушки составляет 5 мкм или менее, предпочтительно 3 мкм или менее. Если шаг намотки катушки находится в таком диапазоне, то число витков катушки на единицу длины может быть увеличено, что приводит к снижению длины и размеров элемента для обнаружения магнитного поля.
[0016] Установка трех элементов для обнаружения магнитного поля на лицевой стороне подложки выполняется следующим образом. На лицевой стороне подложки центр измерения магнитных полей, параллельных лицевой стороне подложки, задается как начало координат. Три оси (ось х, ось у и ось z), проходящие в первом осевом направлении (направление оси х) на лицевой стороне подложки, во втором осевом направлении (направление оси у), препендикулярном первому осевому направлению (направление оси х), и в третьем осевом направлении (направление оси z), перпендикулярном лицевой стороне подложки, соответственно, проходят через начало координат, пересекая друг друга. Предполагая, что ось х проходит в направлении длины подложки, элементы 12 и 13 для обнаружения магнитного поля располагаются с точечной симметрией относительно начала координат, установленного в качестве центра симметрии. Также предполагая, что ось у проходит в направлении ширины, элемент 14 для обнаружения магнитного поля располагается с точечной симметрией относительно начала координат, установленного в качестве центра симметрии. В результате использования одного элемента для обнаружения магнитного поля в направлении оси у и расположения с точечной симметрией указанного элемента, устройство для обнаружения трехмерного магнитного поля может иметь такой размер в направлении ширины, который уменьшен до одной трети.
[0017] Магнитомягкие тела образуют две магнитные цепи в виде заводной рукояти совместно с элементами 12 и 13, установленными на подложке. Магнитомягкие тела как таковые собирают магнитный поток в направлении оси z и вынуждают собранный магнитный поток протекать через магнитную проволоку в элементах. Затем, магнитомягкие тела на обеих сторонах излучают магнитный поток, что позволяет обнаружить напряженность магнитного поля в направлении оси z. Используемое магнитомягкое тело не ограничено в материалах и форме, пока с использованием указанного магнитомягкого тела может быть образована магнитная цепь. Более предпочтительно использовать магнитомягкое тело с высокой магнитной проницаемостью, которое более эффективно собирает магнитное поле. Геометрическая форма магнитомягкого тела предпочтительно должна быть такой, чтобы коэффициент размагничивания снижался, а намагниченность эффективно достигалась посредством магнитного поля в направлении оси z. В виду простоты изготовления, отношение сторон (H/D) магнитомягкого тела, которое определяется как отношение высоты Н к диаметру (диаметр - эквивалентный размер для эллиптической формы) D, предпочтительно составляет 1 или менее. Одно магнитомягкое тело выше начала координат может быть расположено ниже начала координат, а два магнитомягких тела ниже каждого из концов, противоположных началу координат, могут быть расположены выше указанных концов, пока магнитные цепи, как указано выше, формируются так, чтобы обнаруживать магнитное поле в направлении оси z.
[0018] Магнитомягкие тела предпочтительно устанавливают так, чтобы магнитные цепи формировались более эффективно. Например, полюсная лицевая сторона магнитомягкого тела и конец аморфной проволоки изготавливаются по возможности ближе друг к другу так, чтобы снижать сопротивление магнитной цепи. Размер магнитомягкого тела, представляемый площадью поперечного сечения и толщиной, зависит от длины или диаметра элемента для обнаружения магнитного поля. Предпочтительно, магнитомягкое тело имеет большую толщину при увеличении длины элемента для обнаружения магнитного поля.
[0019] По существу, установка элементов по оси х и элемента по оси у или магнитомягких тел предпочтительно является такой, чтобы две оси были перепендикулярны друг другу. Если угол, образованный между осями, отклоняется от прямого угла на определенные градусы, то в ответ на угловое отклонение может быть выполнено соответствующее вычисление корректировок с выходными сигналами элементов для обнаружения магнитного поля так, чтобы устранить это отклонение.
[0020] В устройстве для обнаружения трехмерного магнитного поля настоящего изобретения каждое из двух магнитомягких тел, расположенных ниже концов элементов для обнаружения магнитного поля в первом осевом направлении, располагается на поверхности обработанной торцевой стороны, обработанной перпендикулярно лицевой стороне подложки.
[0021] Подложка, которая содержит магнитомягкие тела, расположенные около концов элементов для обнаружения магнитного поля в направлении оси х, или продольном направлении, обрабатывается по направлению вниз относительно лицевой стороны подложки так, что части концов не включающие элементы для обнаружения магнитного поля удаляются, а магнитомягкие тела образуют поверхности обработанных торцевых сторон. В результате, устройство для обнаружения трехмерного магнитного поля уменьшается по длине. Удаление магнитных тел наполовину или около того может привести к ухудшению функции сбора магнитного поля. В этом случае, площадь поперечного сечения магнитомягкого тела увеличивается. Если поперечное сечение увеличивается в направлении ширины, чтобы сделать его эллиптическим, то снижение по длине устройства для обнаружения трехмерного магнитного поля будет менее затронуто.
[0022] Устройство для обнаружения трехмерного магнитного поля в настоящем изобретении имеет длину 0,6 мм или менее, ширину 0,3 мм или менее и толщину 0,15 мм или менее.
[0023] Следовательно, устройство в настоящем изобретении не только соответствует ожиданиям его использования в смартфоне или носимом компьютере, но и может быть встроено, например, в наконечник направляющего кабеля медицинского катетера.
[0024] Детектор трехмерного магнитного поля в настоящем изобретении содержит устройство для обнаружения магнитного поля по настоящему изобретению и интегральную микросхему, связанные вместе.
[0025] В детекторе трехмерного магнитного поля настоящего изобретения устройство для обнаружения магнитного поля для обнаружения трехосевых магнитных полей снижается по размерам и толщине путем образования магнитных цепей с элементами по оси х и элементом по оси у, установленными на подложке, и с элементами по оси х и магнитомягкими телами так, чтобы обнаруживать магнитное поле в направлении оси z. В дополнение, полное снижение размеров или толщины достигается путем связывания с интегральной микросхемой. Устройство для обнаружения трехмерного магнитного поля в настоящем изобретении и интегральная схема могут быть связаны вместе посредством проволочного монтажа. В этом случае, однако, потребуется дополнительная площадь или высота для проволочного монтажа. По этой причине для обеспечения полного снижения размеров или толщины желательно электрически связать устройство для обнаружения трехмерного магнитного поля и интегральную схему вместе посредством установки друг на друга устройства для обнаружения трехмерного магнитного поля и интегральной схемы и связывания их друг с другом с использованием контактной площадки.
ПРИМЕРЫ
[0026] Далее примеры описываются со ссылкой на прилагаемые чертежи.
Пример 1
Устройство 1 для обнаружения трехмерного магнитного поля согласно примеру 1 показано на ФИГ. 1. ФИГ. 1 представляет собой вид сверху на устройство для обнаружения трехмерного магнитного поля, а ФИГ. 2 представляет вид поперечного сечения, взятый вдоль линии А-А' на ФИГ. 1. ФИГ. 3 представляет собой вид сверху, показывающий базовую структуру элемента GSR.
[0027] Устройство 1 для обнаружения трехмерного магнитного поля содержит три элемента 3 GSR, каждый из которых способен обнаруживать микромагнитное поле, такое как земной магнетизм, и три магнитомягких тела 21 и 22, каждое из которых имеет функции сбора и излучения магнитного поля. Из элементов GSR два показаны как элемент 12 X1 и элемент 13 Х2, расположенные на оси х на лицевой стороне подложки, а один показан как элемент 14 Y, расположенный на оси у. Оси х, у и z перпендикулярны друг другу в начале координат, а элемент 12 X1 и элемент 13 Х2 расположены с точечной симметрией относительно начала координат как центра симметрии, в то время как элемент 14 Y сам по себе расположен с точечной симметрией относительно начала координат как центра симметрии. Одно магнитомягкое тело 21 образовано в форме кнопки выше начала координат (то есть выше элемента 14 Y), а два магнитомягких тела 22 образованы в форме кнопки в подложке 11 и расположены около концов элементов X1 и Х2, при этом указанные концы составляют две внешние кромки подложки 11 в продольном направлении, соответственно.
[0028] Структура элементов 3 GSR (здесь и далее «структура элемента») описывается со ссылкой на ФИГ. 3. В структуре трех элементов 3 аморфная проволока (здесь и далее «проволока») с диаметром 10 мкм используется при длине 120 мкм для элементов 12 и 13 для оси х, и при длине 200 мкм для элемента 14 для оси у. Проволока 31 располагается в центральной части и окружается катушкой 32 обнаружения (здесь и далее «катушка») с внутренним диаметром 20 мкм и шагом намотки катушки 3 мкм, содержащей 30 витков. К обоим концам проволоки 31 и катушки 32 обнаружения прикрепляются выводы 33 проволоки и выводы 35 катушки, соответственно. Контактные площадки 34 электродов проволоки от выводов 33 проволоки и контактные площадки 36 электродов катушки от выводов 35 катушки обнаружения используются для соответствия с выводами (не показаны) интегральной схемы, соответственно.
[0029] Ниже приводится описание магнитомягких тел 21 и 22. Магнитомягкое тело 21 образовано выше начала координат подложки 11 с изолирующей пленкой, вставленной между телом и элементом 14, и выполнено в форме кнопки с диаметром 30 мкм и толщиной 30 мкм, которая имеет ось z в качестве собственной оси. Магнитомягкое тело образовано посредством нанесения покрытия из пермаллоя, состоящего из 45 ат. % Ni-Fe. Каждое из магнитомягких тел 22 образовано посредством обеспечения в подложке 11 эллиптической выемки, имеющей длину 80 мкм, ширину 40 мкм и глубину 40 мкм, и заполнения этой выемки посредством нанесения покрытия из пермаллоя, состоящего из 45 ат. % Fe. Магнитомягкие тела как таковые изолируются от элементов 12 и 13, соответственно. Для магнитомягких тел 21 и 22 может быть использован известный магнитомягкий материал, такой как чистый никель, чистое железо, пермаллой, имеющий другой состав, чем описанный выше, альсифер, и пермендюр. Магнитомягкие тела также могут быть образованы, например, посредством распыления.
[0030] В настоящем примере, две магнитные цепи в виде заводной рукояти образованы в направлении оси х подложки 1. Одна цепь состоит из элемента 12 X1 на левой стороне, который располагается на подложке 1, магнитомягкого тела 22 на левой стороне, которое располагается ниже конца элемента X1, и магнитомягкого тела 21 выше начала координат. Другая цепь состоит из элемента 13 Х2 на правой стороне, магнитомягкого тела 22 на правой стороне, которое располагается ниже конца элемента Х2, и магнитомягкого тела 21 выше начала координат. Напряженность магнитного поля в направлении оси z эффективно обнаруживается посредством образования двух магнитных цепей в виде заводной рукояти симметрично относительно начала координат.
[0031] Функционирование магнитных цепей в виде заводной рукояти далее описывается со ссылкой на ФИГ. 2 (вид поперечного сечения, взятый вдоль линии А-А' на ФИГ. 1). Магнитное поле Hz в направлении оси z намагничивает два магнитомягких тела 22, расположенных около одного конца элемента 12 X1 и элемента 13 Х2, соответственно. Если магнитный полюс около нижних лицевых сторон магнитомягких тел 22 является южным полюсом, то магнитный полюс около верхней лицевой стороны магнитомягкого тела 21 выше начала координат будет северным полюсом. Каждая магнитная цепь 4 образуется в виде заводной рукояти через проволоку 31 элемента, который представлен между соответствующим южным полюсом и северным полюсом. В образованной магнитной цепи сильное магнитное поле, пропорциональное магнитному полю Hz в направлении оси z, вызывает поток через проволоку 31. Посредством такого образования магнитных цепей эффективно достигается увеличенный выходной сигнал, который делает возможным снижение толщины магнитомягкого тела 21 выше начала координат до 0,03 мм. В результате, высота 16 устройства 1 для обнаружения трехмерного магнитного поля задается равной 0,13 мм.
[0032] Выходные сигналы трех элементов GSR измеряются раздельно. Арифметическая обработка выполняется для вычисления напряженностей Нх, Ну и Hz магнитного поля в направлениях осей х, у и z с использованием уравнений (1), (2) и (3), где Hx1 представляет напряженность магнитного поля элемента 12 X1, Нх2 представляет напряженность магнитного поля элемента 13 Х2, a Hy1 представляет напряженность магнитного поля элемента 14 Y. В уравнении (3) K представляет собой коэффициент.


[0033] Напряженность магнитного поля в направлении оси х получается из значения суммы выходных сигналов от элемента 12 X1 и элемента 13 Х2. Это потому, что два элемента образуют магнитные цепи симметрично относительно компонента магнитного поля в направлении оси х, а значения выходных сигналов, имеющие величину пропорциональную напряженности в направлении оси х, одинаковы по знаку. Что касается напряженности магнитного поля в направлении оси у, то выходной сигнал от элемента 14 Y, как одного элемента, считается напряженностью в направлении оси y сам по себе.
[0034] Напряженность магнитного поля в направлении оси z получается из разности между выходными сигналами от элемента 12 X1 и элемента 13 Х2. Это потому, что элемент 12 X1 и элемент 13 Х2 образуют антисимметричные магнитные цепи 6 в виде заводной рукояти, а выходные сигналы от двух элементов пропорциональны напряженности магнитного поля в направлении оси z и противоположны по знаку.
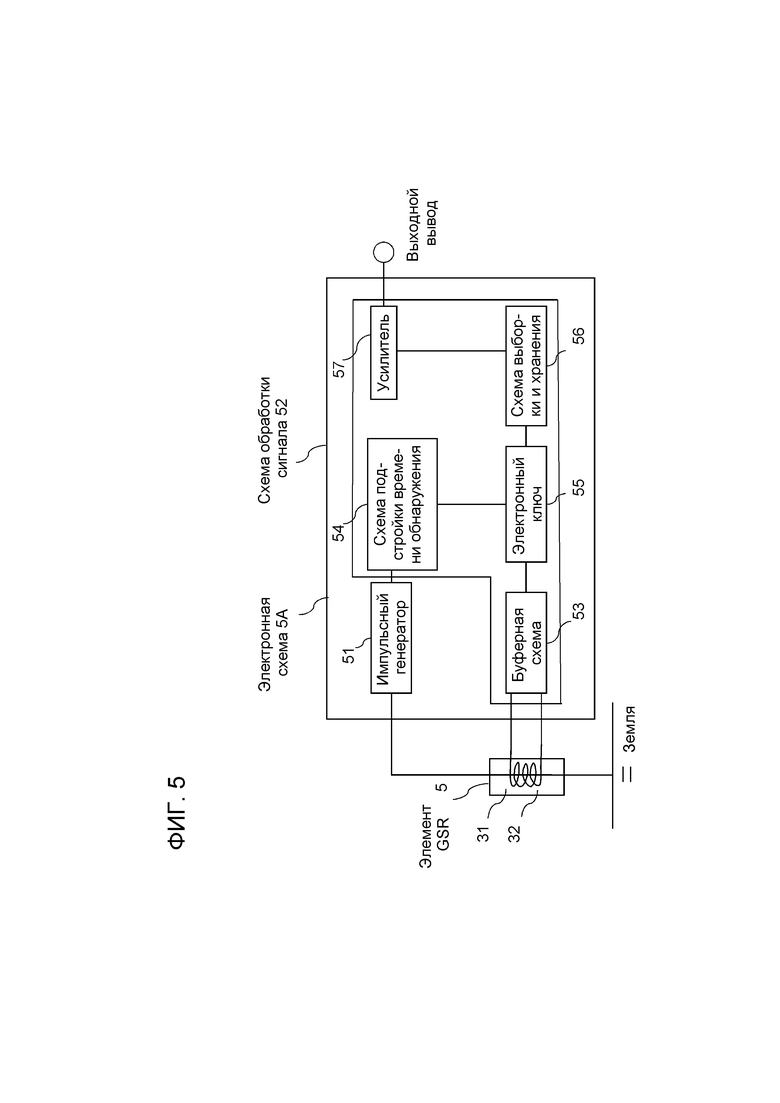
[0035] Электронная схема, используемая в устройстве для обнаружения трехмерного магнитного поля по настоящему изобретению, описывается со ссылкой на ФИГ. 5 и ФИГ. 6. Первоначально, базовое функционирование электронной схемы 5А датчика GSR проиллюстрировано со ссылкой на ФИГ. 5. Электронная схема 5А включает схему 51 генерации импульса (импульсный генератор) и схему 52 обработки сигнала. Схема 52 обработки сигнала состоит из буферной схемы 53, схемы 54 подстройки времени обнаружения, электронного ключа 55, схемы 56 выборки и хранения, и усилителя 57. Импульсный ток высокой частоты, соответствующей 2 ГГц, который генерируется посредством схемы 51 генерации импульса, подается на проволоку 31 элемента 3 GSR. Затем, магнитное поле, выработанное на поверхности проволоки 31 посредством импульсного тока, и внешнее магнитное поле действуют друг на друга для генерации напряжения, соответствующего внешнему магнитному полю, на катушке 32. Для удобства, частота импульса, приводимая здесь, определяется как обратная величина цикла импульсного тока, причем цикл длится в течение времени, в четыре раза превышающего время «спада» Δt импульсного тока.
[0036] Выходное напряжение от катушки 32 вводится в буферную схему 53. Выходное напряжение от буферной схемы 53 сохраняется в качестве напряжения конденсатора схемы 56 выборки и хранения путем краткого переключения (on-off переключение) электронного ключа 55 посредством схемы 54 подстройки времени обнаружения в конкретный момент времени после спада импульсного тока. Выбранное напряжение усиливается посредством усилителя 57 и подается на выход.
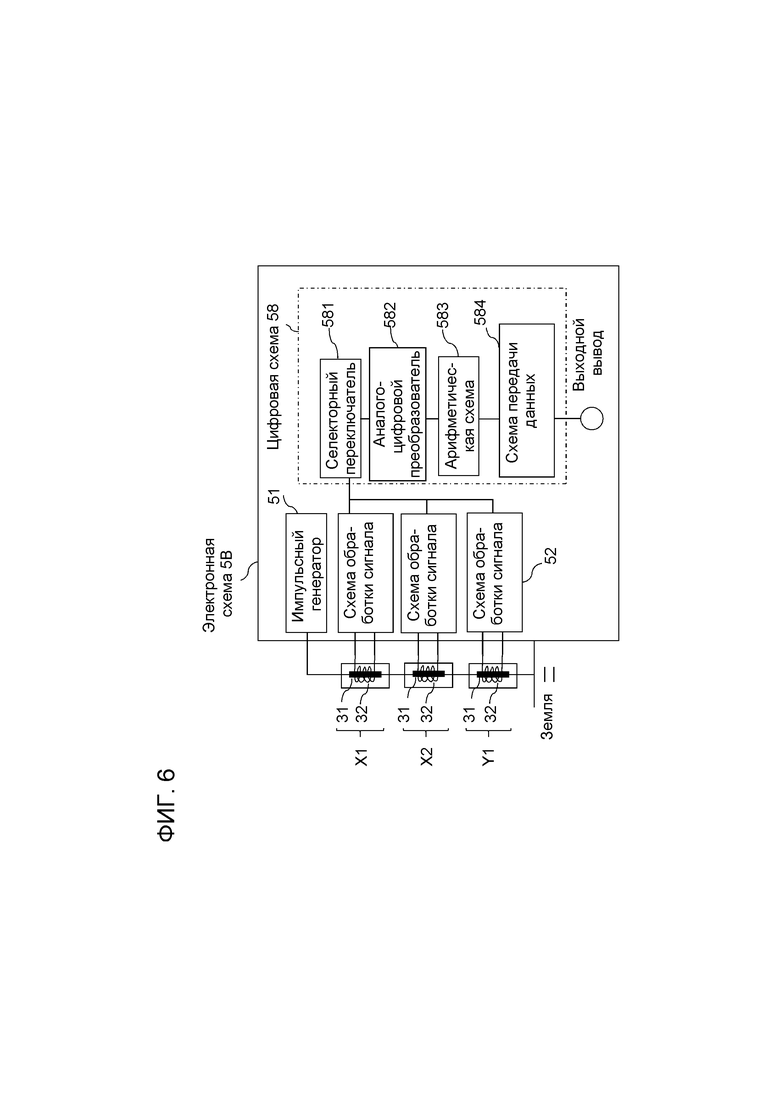
[0037] Функционирование электронной схемы 5В настоящего изобретения, которая включает три элемента 3 GSR, далее описывается со ссылкой на ФИГ. 6. Электронная схема 5В включает схему 51 генерации импульса (импульсный генератор), схемы 52 обработки сигнала, и цифровую схему 58. Схема 51 генерации импульса (импульсный генератор) представляет собой одну схему, в то время как схемы 52 обработки сигнала представляют собой три отдельные схемы для одновременного измерения выходных сигналов соответствующих элементов. Выходные сигналы от трех элементов GSR (X1, Х2 и Y1) вводятся в цифровую схему 58, последовательно преобразуются в цифровые данные посредством аналого-цифрового преобразователя 582 с использованием селекторного переключателя 581, затем эти данные передаются в арифметическую схему 583, чтобы подвергнуть их соответствующей арифметической обработке. Таким образом, каждый из выходных сигналов преобразуется в напряженность трехмерного вектора. После этого, значения напряженности передаются в центральный блок обработки, управляющий такой системой как смартфон, через схему 584 передачи данных.
[0038] Устройство для обнаружения трехмерного магнитного поля согласно настоящему примеру выполнено в форме прямоугольника и имеет длину 540 мкм, ширину 250 мкм и толщину 120 мкм, включая толщину магнитомягкого тела выше начала координат. Устройство для обнаружения трехмерного магнитного поля как таковое снижено по размерам до, например, одной четвертой устройства для обнаружения трехмерного магнитного поля в форме квадрата, которое состоит из четырех элементов для обнаружения магнитного поля и трех магнитомягких тел.
[0039] Пример 2
ФИГ. 7 представляет вид поперечного сечения устройства для обнаружения трехмерного магнитного поля в соответствии с примером 2. Устройство для обнаружения трехмерного магнитного поля согласно настоящему примеру производится путем обрезания обоих концевых частей устройства 1 для обнаружения трехмерного магнитного поля из примера 1 (ФИГ. 1) вдоль линий В-В'. Состояние обрезанных поверхностей показано в виде поперечного сечения взятого вдоль линии А-А' на ФИГ. 1. Каждое из магнитомягких тел в концевых частях изначально имело форму перевернутого конуса, и было подвергнуто разрезанию. В результате обработки вдоль линии В-В' в середине магнитомягкого тела 22 около конца элемента 12 X1 и вдоль линии В-В' в середине магнитомягкого тела 22 около конца элемента 13 Х2, торцевые стороны магнитомягких тел 22 появляются на левой и правой сторонах устройства для обнаружения трехмерного магнитного поля, соответственно. Обработка, приведенная выше, дает возможность снизить длину устройства для обнаружения трехмерного магнитного поля. В настоящем примере, магнитомягкие тела 22 частично удаляются путем отрезания совместно с подложкой 11, в то время как оставшихся их частей достаточно для образования магнитных цепей в виде заводной рукояти, и, соответственно, на способность обнаружения магнитного поля это никак не влияет.
[0040] Устройство для обнаружения трехмерного магнитного поля согласно настоящему примеру уменьшается по размерам в продольном направлении на 50 мкм с каждого конца по сравнению с устройством из примера 1, то есть имеет длину 440 мкм. Ширина в 250 мкм и толщина в 120 мкм при этом не меняются. Следовательно, достигается дальнейшее снижение размеров примерно на 20%.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0041] Устройство для обнаружения трехмерного магнитного поля согласно настоящему изобретению необходимо для трехмерного измерителя азимута, требующего измерения трехмерного земного магнетизма, такого как электронный компас, датчик движения и смартфон. В частности, детектор трехмерного магнитного поля согласно настоящему изобретению подходит для устройства, требующего снижения размеров и толщины в направлении, перпендикулярном монтажной подложке (также называемом направлением оси z). Кроме того, ожидается, что в будущем, детектор трехмерного магнитного поля сверхмалых размеров можно будет прикрепить к наконечнику направляющего провода медицинского катетера, и часть наконечника, обеспеченная детектором, будет использоваться как датчик для определения трехмерного положения в пространстве магнитного поля.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ НА ЧЕРТЕЖАХ
[0042]
1 - Устройство для обнаружения трехмерного магнитного поля
11 - Подложка
12 - Элемент X1 на оси х
13 - Элемент Х2 на оси х
14 - Элемент Y на оси у
21 - Магнитомягкое тело выше начала координат
22 - Магнитомягкое тело ниже конца элемента X1 или элемента Х2, который противоположен началу координат
16 - Толщина устройства для обнаружения трехмерного магнитного поля
3 - Элемент GSR
31 - Аморфная проволока
32 - Катушка обнаружения
33 - Вывод проволоки
34 - Контактная площадка электрода
35 - Вывод катушки
36 - Контактная площадка электрода
4 - Магнитная цепь в виде заводной рукояти
5А - Электронная схема датчика GSR
51 - Схема генерации импульса (импульсный генератор)
52 - Схема обработки сигнала
53 - Буферная схема
54 - Схема подстройки времени обнаружения
55 - Электронный ключ
56 - Схема выборки и хранения
57 - Усилитель
58 - Электронная схема детектора трехмерного магнитного поля
58 - Цифровая схема
581 - Селекторный переключатель
582 - Аналого-цифровой преобразователь
583 - Арифметическая схема
584 - Схема передачи данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МАГНИТНЫЙ ОПРОС | 1996 |
|
RU2145722C1 |
| УСТРОЙСТВО И СПОСОБ ОКАЗАНИЯ ВЛИЯНИЯ И ОБНАРУЖЕНИЯ МАГНИТНЫХ ЧАСТИЦ, ИМЕЮЩИЕ БОЛЬШОЕ ПОЛЕ ЗРЕНИЯ | 2012 |
|
RU2624315C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫСОКОГРАДИЕНТНОГО МАГНИТНОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ВЕЩЕСТВ НА ЕГО ОСНОВЕ | 2004 |
|
RU2370319C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ МАГНИТНЫХ ПОЛЕЙ | 2011 |
|
RU2554592C2 |
| СВЕРХВЫСОКОЧУВСТВИТЕЛЬНЫЙ МАГНИТНЫЙ МИКРОДАТЧИК | 2018 |
|
RU2746978C1 |
| Датчик магнитного поля | 1979 |
|
SU898351A1 |
| ТРЕХМЕРНЫЙ МИКРОДЖОЙСТИК | 2005 |
|
RU2301439C1 |
| МЕДИЦИНСКИЙ КАТЕТЕР И ТРЕХМЕРНАЯ СИСТЕМА МАГНИТНОГО ПОЗИЦИОНИРОВАНИЯ | 2022 |
|
RU2824714C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ | 1991 |
|
RU2015564C1 |
| УСТРОЙСТВО И СПОСОБ ВОЗДЕЙСТВИЯ НА МАГНИТНЫЕ ЧАСТИЦЫ И/ИЛИ ИХ ОБНАРУЖЕНИЯ В ПОЛЕ ЗРЕНИЯ С ИСПОЛЬЗОВАНИЕМ МАТРИЦЫ НАБОРОВ ОДНОСТОРОННИХ ПЕРЕДАЮЩИХСЯ КАТУШЕК | 2011 |
|
RU2556967C2 |
Группа изобретений относится к трехосевому магнитному датчику. Для трех осевых направлений, которые перпендикулярны друг другу в точке начала координат, которая является центральной точкой измерения, устройство измеряет для первого осевого направления магнитное поле в первом осевом направлении с использованием двух элементов, смещенных относительно точки начала координат, измеряет для второго осевого направления магнитное поле во втором осевом направлении через один элемент, размещенный на позиции точки начала координат, и измеряет для третьего осевого направления магнитное поле в третьем осевом направлении посредством объединения двух элементов для первого осевого направления и трех магнитомягких тел и посредством образования двух магнитных цепей по форме заводной рукояти, имеющих точечную симметрию. Технический результат - уменьшение размеров устройства при сохранении высокой чувствительности и помехозащищенности устройства. 3 н. и 2 з.п. ф-лы, 2 пр., 7 ил.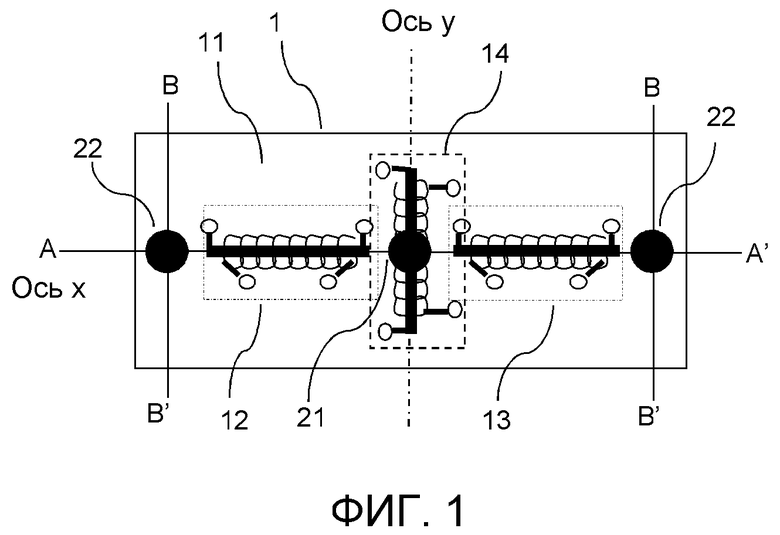
1. Устройство для обнаружения трехмерного магнитного поля, содержащее:
элементы для обнаружения магнитного поля, выполненные с возможностью обнаружения магнитного поля в направлении, параллельном лицевой стороне подложки, и магнитомягкие тела, выполненные с возможностью сбора и излучения магнитного поля, перпендикулярного лицевой стороне подложки, причем
ось, проходящая в первом осевом направлении на лицевой стороне подложки, ось, проходящая во втором осевом направлении, перпендикулярном первому осевому направлению, и ось, проходящая в третьем осевом направлении, перпендикулярном лицевой стороне подложки, пересекаются друг с другом в начале координат как центре измерения магнитного поля на лицевой стороне подложки;
при этом элементы для обнаружения магнитного поля установлены на подложке так, что два элемента для обнаружения магнитного поля расположены в первом осевом направлении с точечной симметрией относительно начала координат, установленного в качестве центра симметрии, а один элемент для обнаружения магнитного поля расположен во втором осевом направлении с точечной симметрией относительно начала координат как центра симметрии, и
магнитомягкие тела расположены выше начала координат и ниже концов двух элементов для обнаружения магнитного поля, расположенных в первом осевом направлении, причем каждый из упомянутых концов противоположен началу координат;
при этом в первом осевом направлении образована магнитная цепь, включающая два элемента для обнаружения магнитного поля и три магнитомягких тела.
2. Устройство по п. 1, в котором каждое из двух магнитомягких тел, расположенных ниже концов двух элементов для обнаружения магнитного поля, расположено на поверхности обработанной торцевой стороны, обработанной в направлении, перпендикулярном лицевой стороне подложки.
3. Устройство по п. 1 или 2, имеющее длину 0,6 мм или менее, ширину 0,3 мм или менее и толщину 0,15 мм или менее.
4. Детектор трехмерного магнитного поля, содержащий устройство для обнаружения трехмерного магнитного поля по любому из пп. 1-3 и интегральную микросхему, связанные вместе.
5. Детектор трехмерного магнитного поля, содержащий устройство для обнаружения трехмерного магнитного поля по любому из пп. 1-3 и интегральную микросхему, электрически связанные вместе посредством установки друг на друга устройства для обнаружения трехмерного магнитного поля и интегральной микросхемы с образованием связи друг с другом с использованием контактной площадки.
| JP 6021239 B2, 09.11.2016 | |||
| JP 6036938 B1, 30.11.2016 | |||
| JP 2009216390 A, 24.09.2009 | |||
| RU 2007134110 A, 20.03.2009. |

