Изобретение относится к способу и устройству для регистрации магнитных полей, в особенности для регистрации положения объектов. Более конкретно изобретение относится к способу регистрации магнитных полей, в особенности для регистрации положения объектов, с помощью предпочтительно удлиненного магнитомягкого элемента, который соединен с электроникой, причем с помощью электроники измеряется импеданс магнитомягкого материала. Кроме того, изобретение относится к устройству для регистрации магнитных полей, в особенности для регистрации положения объектов, с помощью предпочтительно удлиненного магнитомягкого элемента, который соединен с электроникой, причем с помощью электроники определяется/измеряется импеданс (добротность) магнитомягкого материала, в особенности с применением соответствующего изобретению способа.
Задачи измерения положения необходимо решать в многочисленных применениях. В технике автоматизации требуется распознавать положение объектов в процессе обработки или контролировать подвижные части машин. В автомобильной области именно в автомобилях контролируется множество перемещений и положений в или на двигателе, сцеплении, коробке передач, частях кузова и т.д. Подобные применения имеются также в области авиации, где в летательных аппаратах необходимо регистрировать положения клапанов, дверей или шасси. Также в потребительской области, например в стиральных машинах, выполняется измерение веса белья через измерение положения.
Многочисленные решения для этих задач измерения положения описаны в литературе и связаны с различными физическими методами измерений, как, например, зондирующие, емкостные, индуктивные, оптические или также магнитные способы измерений. Особый класс этих способов измерений представляют магнитные способы, потому что при этом на регистрируемом объекте (объекте измерений) размещается магнит. Вариантом этого являются датчики, где магнит ассоциирован с датчиком, и обратное действие регистрируется посредством объекта измерений. Здесь, однако, объект измерений должен иметь магнитные свойства, в особенности ферромагнитные свойства. Общим для этих датчиков является то, что позиция объекта измерений регистрируется посредством магнитного обратного действия. Особенно подходящими магнитные датчики являются там, где через стационарное тело должно детектироваться перемещение подвижных объектов. За счет распространения магнитных полей через немагнитные материалы можно, например, измерять положение поршня внутри цилиндра, если последний состоит из немагнитного материала, например алюминия.
Подобные датчики местоположения с магнитным принципом измерений уже давно известны.
Имеется множество различных способов и материалов, которые могут применяться, чтобы измерять относительное положение датчика по отношению к объекту измерений с встроенным магнитом (постоянным магнитом или электромагнитом).
Типовые примеры включают в себя датчики Холла, магниторезистивные датчики (AMR, GMR, XMR), феррозондовые датчики.
Из DE 196 21 886 А1 известно магнитное устройство измерения положения для определения относительного положения двух подвижных относительно друг друга объектов с по меньшей мере одним феррозондовым датчиком для сканирования периодически намагничиваемого измерительного деления с периодом деления, причем феррозондовый датчик содержит по меньшей мере одну катушку возбуждения и по меньшей мере две размещенные на магнитомягком несущем теле сенсорные (измерительные) катушки, которые по отношению друг к другу размещены на определенном расстоянии.
Для больших измерительных диапазонов несколько феррозондовых датчиков с линейными несущими телами расположены параллельно друг другу и изготовлены по тонкопленочной технологии.
Также предусмотрен блок интерполяции, который работает по принципу амплитудной оценки сигналов несущей частоты.
Из DE 10 2007 062 862 А1 известен способ для определения положения объекта измерений относительно датчика, причем датчик содержит сенсорную катушку, нагружаемую переменным током, в которой под влиянием магнитного поля изменяется магнитная проницаемость магнитомягкого материала. Магнитное поле формируется посредством постоянного магнита, который ассоциирован с объектом измерений.
Относительно других магнитных датчиков согласно уровню техники можно сослаться на DE 10 2007 062 862 А1.
Известные согласно уровню техники датчики имеют, однако, недостатки.
Феррозондовые датчики, как они применяются согласно DE 196 21 886 А1, содержат катушку возбуждения и две катушки приемника, причем измеряется намагничивание магнитомягкого сердечника. Также датчик согласно DE 10 2007 062 862 А1 содержит катушку, которая запитывается переменным током. Катушки являются относительно дорогостоящими компонентами, так как их намотка связана с затратами или, в случае катушек, выполненных печатью на печатных платах или травлением, предъявляются высокие требования к точности процессов печати или травления. Другим недостатком подобных датчиков является то, что катушки или магнитные сердечники представляют собой относительно крупногабаритные компоненты. Тем самым, с использованием этих принципов невозможно сконструировать малогабаритные, компактные датчики, которые также могут применяться в ограниченных конструктивных пространствах.
Другим недостатком известных датчиков является то, что они главным образом измеряют напряженность магнитного поля Н. В известных датчиках Холла, например, имеется прямая линейная взаимосвязь между измеренным сигналом, а именно напряжением Холла UH и магнитным полем Н. Также в случае магниторезистивных датчиков первичный измеренный сигнал пропорционален магнитному полю Н. Тем самым с помощью этого типа датчиков очень хорошо измеряется магнитное поле. Однако существенным недостатком является то, что магнитное поле постоянного магнита или электромагнита с удалением от магнита спадает не линейно, а имеет, как известно, чрезвычайно нелинейную (часто экспоненциальную) спадающую характеристику. Тем самым датчик, который, хотя и имеет линейную характеристику относительно магнитного поля Н, пригоден лишь в ограниченной степени, чтобы регистрировать положение объекта измерений, который содержит магнит. В технике является особенно предпочтительным получать сигнал, который зависит линейно от желательного параметра, в данном случае от положения или расстояния до объекта измерений, потому что тогда сопряженная с затратами линеаризация или калибровка могут отсутствовать. Для того чтобы при нелинейной характеристике все же получить приближенно линейный сигнал, часто диапазон измерений ограничивается, так что из нелинейной характеристики применяется лишь малый, в первом приближении кусочно-линейный сегмент. Однако этот метод существенно ограничивает достижимый диапазон измерений.
В основе настоящего изобретения лежит задача предложить просто конструируемый, благоприятный по затратам и компактный датчик с большим диапазоном измерений и высоким разрешением для измерения магнитных полей, с помощью которого может измеряться положение объектов относительно датчика. В конечном счете должно, в общих чертах, быть предоставлено устройство для регистрации магнитных полей с соответствующими свойствами. Также должен быть предоставлен соответствующий способ для регистрации магнитных полей, который использует соответствующее изобретению устройство.
Вышеуказанная задача решается признаками независимых пунктов 1 и 12 формулы изобретения.
Соответствующий изобретению способ отличается тем, что используется магнитное поле, в связи с чем за счет положения объекта, который находится в таком расположении по отношению к магнитомягкому материалу, что в месте магнитомягкого материала устанавливается магнитное поле, посредством чего магнитная проницаемость µ магнитомягкого материала устанавливается в зависимости от магнитного поля и, тем самым, от положения объекта.
Соответствующее изобретению устройство решает вышеуказанную задачу тем, что используется магнитное поле, причем за счет положения объекта измерения, который находится в таком расположении по отношению к магнитомягкому материалу, что в месте магнитомягкого материала устанавливается магнитное поле, причем магнитная проницаемость устанавливается/получается в зависимости от магнитного поля и, тем самым, в зависимости от положения, причем магнитная проницаемость изменяет получаемый в результате этого измеряемый импеданс.
Далее соответствующий изобретению способ и соответствующее изобретению устройство обсуждаются равным образом, а именно в отношении существенных для изобретения признаков.
Применяемый для нового сенсорного принципа магнитомягкий материал может иметь аморфную, нанокристаллическую или кристаллическую структуру и доступен в форме полосы или микропровода со стеклоизоляцией или без нее.
Посредством специальных составов материала могут устанавливаться различные основные свойства:
- магнитострикция и магнитоупругие эффекты,
- GMI (гигантский магнитоимпеданс),
- магнитный резонанс.
Подобные магнитомягкие материалы используются в различных применениях, как, например, в противоугонной защите, в датчиках давления, датчиках силы, датчиках пути, в частности на основе магнитострикции и т.д.
Имеются различные способы для изготовления аморфных или нанокристаллических микропроводов. Например, в процессе Taylor-Ulitovski микропровод непосредственно вытягивается из расплава. Важным признаком этого процесса является то, что из чистых металлов и сплавов изготавливаются благоприятные по стоимости микропровода с диаметрами от примерно 1 мкм до примерно 40 мкм со стеклоизоляцией.
В принципе все магнитомягкие материалы имеют зависимость магнитной проницаемости от напряженности магнитного поля, действующего на материал.
За счет применения различных композиций материалов могут устанавливаться различные характеристики, касающиеся магнитных свойств. Например, при этом может оказываться влияние на гистерезис, форму петли гистерезиса и максимальную магнитную проницаемость.
Особенно предпочтительным для соответствующего изобретению датчика является применение материалов, которые имеет высокую магнитную проницаемость и малую коэрцитивную напряженность поля. Это относится особенно к составам материалов, которые проявляют эффект, обозначаемый в литературе как “MI” (магнитноиндуктивный) или прежде всего как “GMI” (гигантский магнитоимпеданс).
GMI-эффект изменяет исключительно сопротивление по переменному току (импеданс Z) магнитного материала. Если аморфный или нанокристаллический микропровод запитывается переменным током с высокой частотой, то переменный ток протекает, на основе скин-эффекта, преимущественно в тонком слое под поверхностью провода. Толщина этого слоя описывается глубиной скин-слоя:


где ω - круговая частота переменного тока,
σ - проводимость,
µr - относительная магнитная проницаемость.
Если в месте провода приложено внешнее магнитное поле, то относительная магнитная проницаемость провода изменяется, причем при возрастании поля магнитная проницаемость падает. За счет этого глубина скин-слоя увеличивается, что ведет к тому, что ток протекает и в более глубоких слоях под поверхностью провода. Тем самым увеличивается эффективное поперечное сечение провода, из-за чего сопротивление или импеданс Z падает.
Величина GMI эффекта измеряется в относительном изменении импеданса:

причем Z(H) - импеданс при магнитном поле Н, и Z(Hs)- импеданс при напряженности поля насыщения Hs. Относительное изменение особенно велико в тонких пленках или проволоках, так как глубина скин-слоя там по отношению к полной толщине или диаметру составляет большую долю. Это относительное изменение может принимать очень высокие значения, благодаря чему могут изготавливаться очень чувствительные датчики магнитного поля.
Этот эффект может наблюдаться в полосах, пленках или микропроводах из аморфных и нанокристаллических ферромагнитных материалов при частотах от 0,1 МГц до 30 МГц и описан в большом числе публикаций.
До настоящего времени используются датчики и системы на основе микропровода с магнитоиндуктивным эффектом (MI) в системах безопасности для защиты объекта, который имеет на себе определенный образец кода (например, US 5801630, US 5583333, DE 60003067 T2).
Настоящее изобретение относится к способу и устройству для эксплуатации чувствительного к магнитному полю датчика положения, при котором в противоположность известным до сих пор датчикам, с подвижным магнитом или электромагнитом реализуется сравнительно большой диапазон измерений и хорошее разрешение при одновременно хорошей линейности.
Дополнительно соответствующее изобретению решение имеет незначительные конструктивные габариты, малый вес и низкую стоимость. Из этих свойств следует очень широкая область использования для такого измерения положения, например в стиральных машинах, компрессорах и сцеплениях.
Теперь имеются различные возможности, чтобы решения согласно предложенному изобретению, выполнить и дополнительно усовершенствовать предпочтительным образом. Для этого, с одной стороны, можно сослаться на зависимые пункты формулы, подчиненные пунктам 1 и 12, а с другой стороны, на последующее пояснение предпочтительного примера выполнения изобретения с помощью чертежей. Во взаимосвязи с пояснениями предпочтительного примера выполнения изобретения на основе чертежей поясняются в общем предпочтительные выполнения и дальнейшие развития заявленного решения.
На чертежах показано следующее:
Фиг 1a - в схематичном виде пример выполнения соответствующего изобретению датчика из удлиненного магнитомягкого материала,
Фиг. 1b - в схематичном виде другой пример выполнения соответствующего изобретению датчика, причем там основной элемент размещен непосредственно на печатной плате и с ним можно контактировать,
Фиг. 2 - в схематичном виде другой пример выполнения соответствующего изобретению датчика, причем там магнит относительно основного элемента размещен в различных ориентациях на объекте измерения,
Фиг. 3 - на диаграмме индуктивность и фаза в зависимости от напряженности поля в осевом направлении для магнитомягких материалов,
Фиг. 4 - на диаграмме индуктивность и фаза в зависимости от положения магнита, причем существует линейная взаимосвязь между расстоянием до магнита и магнитной проницаемостью,
Фиг. 5 - на диаграмме наложение функции µ(Н) магнитной проницаемости магнитомягкого материала и Н(х) зависимости от расстояния магнитного поля постоянного магнита,
Фиг. 6 - в схематичном виде тестовое устройство, состоящее из двух тестовых катушек, которые навиты на трубку, которая в свою очередь надвинута на основной элемент,
Фиг. 7 - в схематичном виде рабочий диапазон соответствующего изобретению датчика, причем отображена взаимосвязь между µ и Н,
Фиг. 8а - в схематичном виде выполнение основного элемента как проводящей петли,
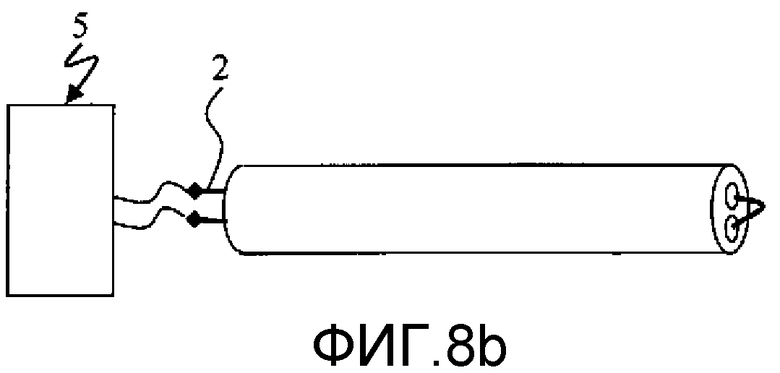
Фиг. 8b - в схематичном виде пример выполнения соответствующего изобретению магнитного элемента, встроенного в трубку, например, для двухдискового сцепления,
Фиг. 9 - в схематичном виде другой пример выполнения магнитомягкого элемента в форме меандра или навитой катушки,
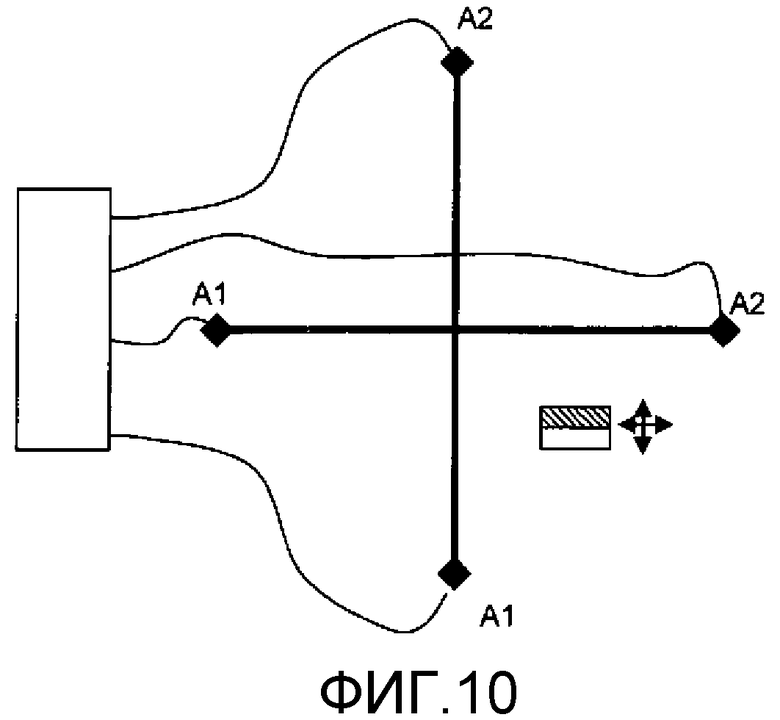
Фиг. 10 - в схематичном виде выполненный двумерным основной элемент для регистрации перемещения в плоскости,
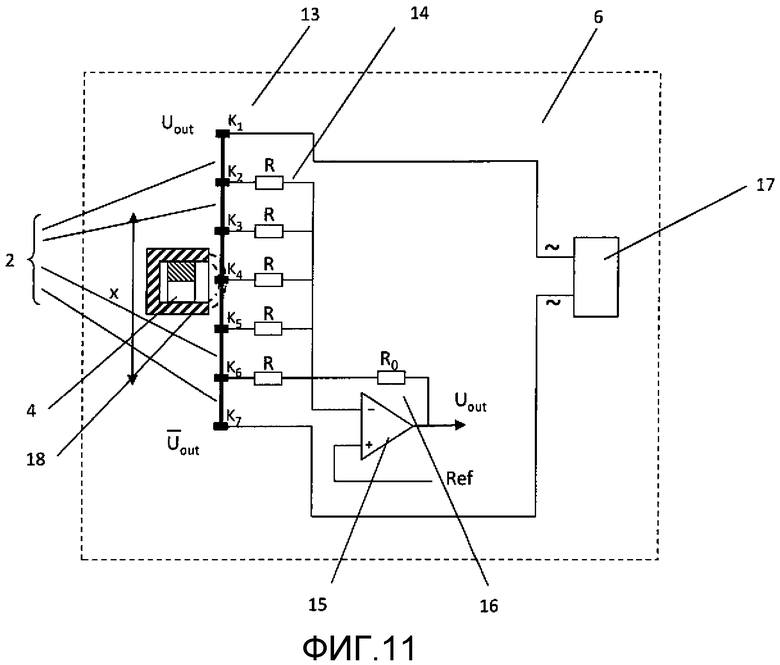
Фиг. 11 - в схематичном виде последовательная компоновка основных элементов, согласно которой несколько основных элементов последовательно расположены друг за другом,
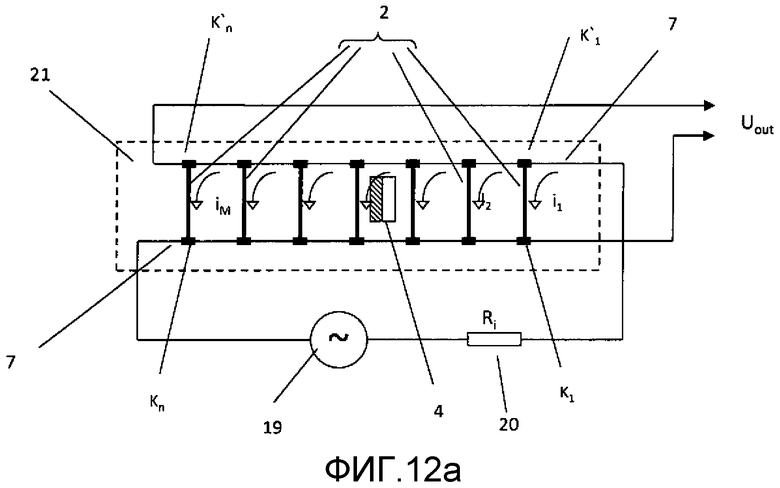
Фиг. 12а - в схематичном виде параллельная компоновка, причем здесь несколько основных элементов расположены рядом друг с другом, а именно для образования инкрементного датчика, и
Фиг. 12b - в схематичном виде другой вариант параллельной компоновки основных элементов, причем здесь может выполняться переключение между несколькими расположенными рядом друг с другом основными элементами (мультиплексор).
Соответствующий изобретению датчик может состоять из удлиненного магнитомягкого материала, который подключен к электронике и обтекается переменным током. Объект измерения ассоциирован с магнитом, который в зависимости от положения объекта измерения относительно датчика изменяет магнитную проницаемость магнитомягкого материала (см. фиг. 1а, 1b).
За счет изменения магнитной проницаемости изменяется, ввиду GMI-эффекта, комплексный импеданс схемы, которая образована магнитомягким материалом. Магнитомягкий материал далее для простоты упоминается как основной элемент. Выгодным является оценивать изменение импеданса.
Оценивание импеданса известными методами позволяет определять положением объекта измерения относительно датчика. Например, может измеряться импеданс путем измерения падения напряжения на проводе 
Но можно также оценивать индуктивность основного элемента. В качестве сигнала измерения тогда служит относительное изменение индуктивности:

причем L(H) - индуктивность магнитного поля Н, и L(Hs)- индуктивность при напряженности поля насыщения Hs. Индуктивность L(Н) зависит от магнитного поля Н в месте датчика, что в свою очередь зависит от расстояния до или положения объекта измерения. Тем самым из измерения индуктивности L можно определить положение объекта измерения. Индуктивность может определяться, например, с помощью плоской катушки или навитой катушки или может использоваться обратное действие на внешнее поле с помощью дополнительных датчиков поля, например датчиков Холла, AMR, GMR, XMR.
На фиг. 1а и 1b конкретно показан магнитомягкий материал как основной элемент 2, в частности согласно фиг. 1а, как удлиненный элемент 2. Кроме того, на фиг. 1а, наряду с устройством 1 датчика также показаны объект 3 измерения, постоянный магнит 4 и электроника оценивания/измерительный мост 5.
Согласно фиг. 1b, основной элемент 2 имеет относительно большой линейный диапазон измерений и может, если требуется, наноситься непосредственно на печатную плату, и там может выполняться контакт с ним. Фиг. 1b показывает, наряду с основным элементом 2, объект 3 измерения, постоянный магнит 4, электронику оценивания/измерительный мост 5 и плату 6, оснащенную электроникой и основным элементом 2.
Согласно представлению на фиг. 2 магнит 4 относительно основного элемента 2 может располагаться в различных ориентациях. В зависимости от требований задачи измерения магнит 4 может располагаться таким образом, что он приближается к основному элементу 2 с торцевой стороны или сбоку. Ориентация магнита 4 может при этом выбираться таким образом, что достигается желательный подъем сигнала в основном элементе 2, в зависимости от диапазона измерения. При этом магнит 4 может быть непосредственно связан с объектом 3 измерения. Кроме того, магнит 4 также может располагаться отдельно от объекта 3 измерения, например, на датчике. Необходимо только гарантировать, что из-за объекта измерения распределение поля магнита 4 в месте основного элемента 2 изменяется. Для этого необходимо, чтобы объект измерения имел ферромагнитные свойства.
Переменный ток, который протекает через основной элемент, может генерироваться в синусоидальной форме с помощью подходящего синусоидального осциллятора. Но также возможна другая форма запитки основного элемента, например, прямоугольными или треугольными импульсами. Важно только, что осуществляется зависимое от времени изменение тока, так что в основном элементе создается GMI-эффект. При этом предпочтительно, если частота переменного тока лежит в диапазоне от 0,1 до 40 МГц.
Фиг. 3 показывает измеренную индуктивность и фазу в зависимости от внешнего магнитного поля Н. Магнитное поле формировалось катушкой Гельмгольца и в месте основного элемента является однородным и ориентировано в продольном направлении основного элемента. Индуктивность измерялась измерительным мостом при частоте 1 МГц.
Для магнитомягких материалов магнитная проницаемость, в зависимости от напряженности Н магнитного поля, имеет характерную форму. Путем измерения индуктивности L можно определить магнитную проницаемость, которая показана на фиг. 3. Известные чувствительные к магнитному полю датчики, которые применяются для измерения напряженностей поля, используют, как правило, нарастающий фронт кривой µ(Н). Причина заключается в том, что с подобными датчиками, прежде всего, должны измеряться малые магнитные поля, как, например, магнитное поле Земли или магнитное поле на магнитном носителе данных (жестком диске).
Кроме того, в соответствии с изобретением было выявлено, что для измерения положения спадающий фронт является более благоприятным, так как может достигаться заметно больший диапазон измерений (относительно измерения положения/расстояния относительно магнита). Как показано на фиг. 4, может быть реализована линейная взаимосвязь между расстоянием до магнита и магнитной проницаемостью. Кроме того, на фиг. 4 ясно показано, что взаимосвязь между µ и Н является в высокой степени нелинейной.
Как уже упоминалось, также напряженность Н магнитного поля магнита с возрастанием расстояния до поверхности магнита нелинейно снижается.
Фиг. 4 показывает, в частности, реально измеренную индуктивность короткого куска провода (50 мм) и измеренный примерно линейный диапазон измерения между расстоянием до магнита 0 мм и расстоянием до магнита примерно 45 мм.
При увеличении расстояния до магнита и, тем самым, при использовании основного элемента вне рабочего диапазона поле, вызванное постоянным магнитом, продолжает уменьшаться и приводит после следующего подъема к описанному снижению магнитной проницаемости и, тем самым, также к уменьшению измеряемой индуктивности. Измерение на магнитомягком проводе следует интерпретировать как свертку идеальной характеристики в точке на µ(Н)-кривой с местом магнита. Если взять значения индуктивности из характеристики спадающего фронта, показанной на фиг. 4, и сравнить их с измерениями в однородном магнитном поле, получаемыми согласно фиг. 3, то можно легко получить релевантный в соответствии с изобретением рабочий диапазон.
Фиг. 5 показывает в принципе наложение функций µ(Н) магнитной проницаемости магнитомягкого материала и Н(х) зависимости от расстояния магнитного поля постоянного магнита.
Обе нелинейные функции накладываются в датчике, как это для примера показано на фиг. 5. Так существует возможность создать датчик, выходной сигнал которого в зависимости от положения магнита в первом приближении является линейным, не требуя учитывать дополнительные шаги линеаризации. Чувствительность (=крутизне характеристики) и связанное с ней разрешение в диапазоне измерений являются, таким образом, почти постоянными. Это обеспечивает преимущество по сравнению с обычными магнитными датчиками положения. Они требуют, ввиду нелинейной связи между расстоянием и магнитной проницаемостью в частичных диапазонах характеристики, более высокого усиления, из-за чего также усиливаются шумы и разрешение падает.
Согласно представлению на фиг. 5 может быть осуществлена линеаризация. В частности, там показано:
Сектор I: спадающий фронт µ(Н)-кривой
Сектор II: зависимость напряженности поля (Hm) постоянного магнита от расстояния до поверхности магнита
Сектор III: зависимость µ(d) - зависимость магнитной проницаемости от расстояния d до магнита
Сектор IV: линейная интерполированная зависимость µ(d).
Из фиг. 5 следует относительно линейная взаимосвязь между положением магнита и магнитной проницаемостью.
Индуктивность соответствует магнитной проницаемости основного элемента и показывает известный ход кривой для магнитомягких материалов. Это соответствует идеализированному представлению с однородным магнитным полем в любом месте основного элемента. В реальности, однако, магнитное поле вдоль основного элемента не будет однородным, согласно фиг. 5, так как реальное поле (постоянного) магнита зависит от расстояния до магнита. Поэтому эта идеализированная характеристика справедлива только для кусочных, бесконечно малых участков основного элемента. В целом, для индуктивности основного элемента в неоднородном поле получается подобная кривая, которая в принципе соответствует свертке отдельных функций вдоль оси основного элемента.
Чтобы гарантировать, что рабочий диапазон соответствующего изобретению датчика установлен на спадающей части характеристики согласно фиг. 3, может определяться сигнал посредством тестового устройства на основном элементе. Тестовое устройство на фиг. 6 состоит из двух тестовых катушек (6А1 и 6А2), которые навиты на трубку (7), которая надвинута на основной элемент. Тестовые катушки (6) размещены рядом с выводами А1 и А2 основного элемента (2) в точках 1 и 2. Чтобы исключить измерение краевых эффектов, обе катушки (6) сдвинуты на расстояние h, например на 2-3 мм относительно выводов А1 и А2.
Фиг. 7 показывает установку рабочего диапазона датчика.
Для того чтобы определить рабочий диапазон, объект (3) измерения сдвигается с увеличением расстояния d от вывода А2 по оси в продольном направлении основного элемента (2). Сначала объект измерения находится близко к основному элементу. Магнитное поле постоянного магнита в месте основного элемента очень высокое. Это соответствует очень плоской части µ(Н)-кривой на фиг. 7 при очень большой напряженности Н поля. Там практически не достигается никакого изменения µ, так как магнитная проницаемость основного элемента близка к насыщению.
Индуктивности тестовых катушек (6А1 и 6А2) регистрируются с помощью измерительного моста. При очень высокой напряженности Н поля измеренные индуктивности обеих тестовых катушек малы и примерно равны, так что эта область не пригодна для измерений расстояния. Постоянный магнит затем сдвигается от вывода А2 с увеличением расстояния по оси в продольном направлении основного элемента (2) до тех пор, пока импедансы тестовых катушек 6А1 в точке 1 и 6А2 в точке 2 не начнут изменяться. Это положение соответствует минимальному расстоянию до магнита и, таким образом, нижней границе диапазона измерений и описывает рабочую зону AZmin.
Постоянный магнит смещается далее по оси в продольном направлении элемента (2), пока измеренная индуктивность тестовой катушки 6А1 в точке 1 не достигнет максимального значения Lmax. Этот диапазон соответствует очень крутой части µ(Н) - кривой на фиг.7, непосредственно перед достижением максимума. Это положение соответствует максимальному расстоянию до магнита и, тем самым, верхней границе диапазона измерений и описывает рабочую зону AZmax.
Чтобы гарантировать, что рабочая зона AZ находится на спадающем фронте µ(Н)-кривой, диапазон измерений следовало бы ограничить на 0,9 Lmax. Определение рабочего диапазона дает, таким образом, в результате то, что постоянный магнит должен перемещаться только внутри определенного таким образом рабочего диапазона на спадающем фронте µ(Н)-кривой.
Дополнительно, на переменный ток, который протекает через основной элемент, может также накладываться постоянный ток. Так как GMI-эффект является эффектом переменного тока, внешнее магнитное поле не оказывает влияния на постоянный ток.
При дополнительной запитке основного элемента постоянным током может вырабатываться сигнал, который, независимо от положения объекта измерения, реагирует только на изменения в основном элементе. Это могут быть, например, температурные изменения или электромагнитные помехи, которые оказывают влияние на сопротивление по постоянному току основного элемента. С помощью запитки постоянным током может, таким образом, обнаруживаться влияние помех. Например, омическое сопротивление постоянного тока основного элемента изменяется с изменением температуры. Тем самым путем измерения сопротивления постоянного тока можно очень просто реализовать температурную компенсацию датчика.
В другом предпочтительном выполнении постоянный ток может также применяться для того, чтобы генерировать статическое магнитное поле, которое известным образом создается вдоль обтекаемого током проводника. Это магнитное постоянное поле приводит к тому, что магнитная проницаемость провода изменяется. Это приводит, так сказать, к магнитному напряжению смещения основного элемента, которое приводит в результате к смещению характеристики. Это может, подобно способу с тестовой катушкой, служить тому, чтобы устанавливать рабочий диапазон датчика. Однако в отличие от ранее описанного это является предварительной установкой, без изменения расстояния до постоянного магнита. Тем самым может также простым образом устанавливаться рабочий диапазон, не требуя изменения самого постоянного магнита или его положения. Тем самым становится возможным, при заданных расстояниях, которые, например, определяются заданными возможностями перемещения объекта измерения, не требуя, чтобы магнит дополнительно настраивался по своей ориентации или напряженности поля, устанавливать рабочий диапазон таким образом, что датчик работает в оптимальной области спадающего фронта.
Протекающий по проводу постоянный ток может предпочтительным образом применяться для установки рабочей точки на характеристике. Тем самым становится возможным измерять малые поля, как, например, в случае датчиков магнитного поля или большие поля, как, например, в случае датчика положения. Следовательно, датчик может быть «предварительно смещен». За счет наложения постоянного тока можно, в зависимости от направления протекания тока, также реализовать зависимость от направления. С помощью возбуждаемого постоянным током магнитного поля определяется направление, так как магнитное поле распространяется в кольцевой форме вдоль провода. Протекающий через провод ток может в определенных применениях заменять дополнительную компенсационную катушку, которую нужно было бы навивать вокруг провода.
Измерение индуктивности основного элемента может, как уже описано, осуществляться также посредством одной или нескольких отдельных катушек. При этом катушка может также применяться для того, чтобы в месте основного элемента генерировать магнитное поле, которое является независимым от положения внешнего магнитного поля постоянного магнита. Если катушка обтекается постоянным током, за счет этого в основном элементе создается статическое магнитное поле. За счет этого может также создаваться смещение основного элемента. При этом достигаемые эффекты соответствуют вышеописанному способу запитки постоянным током основного элемента.
Выполнение соответствующего изобретению датчика посредством микропроводов со стеклоизоляцией также является особенно предпочтительным, потому что эти провода обладают очень высокой температурной стойкостью. Обычные провода имеют, например, изоляцию из полиуретана, полиамида или полиимида. Однако эти изоляционные материалы являются ограниченными по своей температурной стойкости. Например, провода с полиимидной изоляцией могут использоваться максимально до 250°С. За счет применения стеклоизоляции, которая для упомянутых микропроводов, например, автоматически на основе процесса Taylor-Ulitovski наносится уже в процессе изготовления, могут создаваться датчики с существенно более высокой температурной стойкостью.
Выполнение конструкции датчика может быть реализовано в особенно простом и экономичном варианте путем непосредственного нанесения на подходящую подложку, например печатную плату или керамическую подложку (фиг. 1а). Контакт с основным элементом может осуществляться известными способами, например припаиванием, сваркой, пайкой. В зависимости от длины основного элемента является целесообразным его фиксировать между местами контакта, например приклеиванием. Электроника может размещаться на той же подложке. Это имеет преимущество, состоящее в том, что, во-первых, реализуется особенно компактная форма, а во-вторых, возможны очень короткие длины проводника между основным элементом и электроникой. Это является предпочтительным, так как, ввиду относительно высоких частот, желательны короткие длины проводников.
Фиг. 8а показывает основной элемент 2 в форме проводящей петли. Этот основной элемент 2 пригоден, в частности, для встраивания в трубку согласно представлению на фиг. 8b, например, в рамках применения в двухдисковом сцеплении.
На фиг. 8а и 8b, наряду с конфигурацией датчика, также показаны основной элемент 2 и электроника оценивания/ измерительный мост 5.
Чтобы избежать обратного проводника или повысить индуктивность, магнитомягкий элемент может также выполнять функцию сигнального обратного проводника. Преимущество данного подхода состоит в том, что необходимо только одностороннее контактирование магнитомягкого элемента. Например, возможно встраивание в трубки, например, в случае двухдисковых сцеплений.
Повышение чувствительности, например, также возможно за счет того, что основной элемент выполнен в форме меандра или в форме катушки (фиг. 9). За счет повышения индуктивности повышается сопротивление по переменному току устройства, благодаря чему оно может эксплуатироваться и при меньших частотах. Это имеет преимущество, состоящее в том, что электроника может быть выполнена более просто, и чувствительность устройства возрастает.
Если протяженная форма выполнения по причинам контактирования или ввиду конструктивного пространства невозможна, основной элемент может также выполняться в форме петли (фиг. 9). Тем самым становится возможным контактирование основного элемента выполнить на одной стороне, что упрощает изготовление и уменьшает конструктивное пространство. Петлю также можно выполнить, например, внутри керамической трубки, за счет чего может быть изготовлен температурно-стабильный, простой датчик с очень малыми размерами. Посредством выполнения в форме петли одновременно повышается индуктивность устройства.
Возможны другие компоновки, в которых основной элемент формируется произвольно и согласуется с конкретными условиями монтажа. При применении микропровода последний может прокладываться практически в любых формах вдоль траекторий, которые описывает объект измерения. Возможно, например, определение положения рычага управления автоматической коробки передач за счет размещения провода вдоль ступенчатых положений рычага управления.
Кроме того, возможно расположение нескольких основных элементов относительно друг друга, чтобы определять положение по двум или трем измерениям (фиг. 10). Например, целесообразно для двумерной регистрации перемещения в плоскости использовать компоновку из нескольких основных элементов на подложке под углом 90°. Тем самым определяются два направления измерения, за счет чего обеспечивается возможность двумерной регистрации положения. Аналогичным образом, это справедливо для трех измерений, при этом три основных элемента располагаются соответственно под углом 90°.
Основной элемент, в зависимости от расположения, напряженности поля и полярности магнита, обеспечивает определенный диапазон измерений. Для того чтобы увеличить диапазон измерений соответствующего изобретению датчика, несколько основных элементов могут быть расположены последовательно или параллельно друг другу, причем отдельные элементы соответствуют основному элементу, показанному на фиг. 1. В последовательной компоновке согласно фиг. 11 несколько основных элементов расположены последовательно друг с другом. За счет съема напряжения генерируется линейный сигнал, если магнит перемещается сбоку вдоль основного элемента.
Несколько основных элементов в ряду через места контакта К1-К7 электрически соединены друг с другом. На материале носителя, например, на печатной плате или керамической подложке, формируются места контакта К1-К7, которые находятся на определенном расстоянии друг от друга. Объект измерения имеет постоянный магнит, который встроен в ярмо. Ярмо служит для направления поля, так что силовые линии поля постоянного магнита предпочтительно становятся действующими только в направлении сенсорного элемента. При этом является предпочтительным, если направление поля действует таким образом, что действующее поле приближенно соответствует расстоянию между соседними контактами. Контакты К1 и К7 соединены с выводами осциллятора 6. Датчик запитывается от осциллятора через места контактов К1 и К7 высокочастотным комплементарным переменным током. Контакты К2-К6 соединены через сопротивления R1-R6 с инвертирующим входом операционного усилителя 7. На выходе операционного усилителя может сниматься сигнал, который пропорционален положению объекта 2 измерения вдоль датчика. Сопротивления R могут быть, например, подстраиваемыми лазером сопротивлениями, за счет чего могут корректироваться смещение и нелинейность характеристики. Предпочтительным в этой компоновке является то, что датчик полностью может выполняться на печатной палате вместе с электроникой оценивания как единый блок. Последовательное расположение основных элементов может при этом осуществляться не только как последовательное расположение отдельных основных элементов с короткими участками провода, но также между контактами К1 и К7 может располагаться длинный участок провода, причем контактирование в местах К2-К6 контакта, например путем запрессовки, пайки или сварки, подразделяет длинный провод, так что в результате вновь получается последовательное расположение коротких основных элементов.
В параллельной компоновке согласно фиг. 12а несколько основных элементов расположены рядом друг с другом, за счет чего получается инкрементный (с приращениями) датчик. Сигнал является только кусочно-однозначным, подобно известным инкрементным датчикам. В варианте параллельной компоновки по фиг. 12b может также осуществляться переключение между несколькими расположенными рядом друг с другом основными элементами.
На фиг. 12а, 12b наряду с основным элементом 1 также показаны питающая линия 2, подложка 3, магнит 4 и источник 5 переменного тока с внутренним сопротивлением R0.
Для того чтобы дополнительно повысить разрешение соответствующего изобретению датчика, несколько основных элементов могут располагаться параллельно друг другу. Между двумя расположенными параллельно на подложке питающими линиями параллельно друг другу расположены несколько основных элементов на одинаковом расстоянии друг от друга и в местах контакта К1… Кn электрически соединены с питающими линиями, так что получается периодическая структура с периодом «дельта». Объект измерения перемещается параллельно подложке поперек основных элементов и содержит постоянный магнит. К начальному и конечному контактам К1' и Кn питающей линии подключен источник переменного тока. Выходной сигнал может сниматься на других концах питающих линий К1 и Кn'. Преимущество этой компоновки состоит в том, что токовый путь в питающих линиях всегда одинаков и за счет этого падение напряжения на каждом основном элементе вдоль участка измерения одинаково. Однако с помощью этой компоновки можно реализовать только периодический выходной сигнал. Поэтому изначально невозможно абсолютное измерение. Однако абсолютное измерение можно было бы реализовать с помощью известных методов, например посредством второй компоновки, которая по отношению к первой компоновке сдвинута на полпериода, или которая, согласно нониусному принципу, сдвинута по отношению к первой на больший или меньший период.
Фиг. 12b показывает особую форму выполнения, согласно которой основные элементы не находятся в постоянном контакте с питающими линиями, а каждый основной элемент снабжен переключателем. Этот переключатель образован мультиплексором. В частности, на фиг. 12b представлены основные элементы m1,… mn. Кроме того, на фиг. 12b показаны питающая линия 2, подложка 3, постоянный магнит 4, источник 5 переменного тока, мультиплексор 6 и микроконтроллер µС.
Для того чтобы снизить влияние помеховых полей компоновка по фиг. 12b является особенно предпочтительной. Подобно предыдущей фигуре основные элементы не находятся в постоянном контакте с питающими линиями, а каждый основной элемент снабжен переключателем. Эти переключатели могут, например, быть образованы мультиплексором, который управляется микроконтроллером. Как только сигнал основного элемента достигает определенного порога, осуществляется переключение на следующий основной элемент. Преимущество этой компоновки заключается в том, что для измерений всегда применяется тот основной элемент, где находится магнит. Поэтому помехи, которые действуют на другие основные элементы, не входят или входят лишь в незначительной степени в выходной сигнал.
Преимущества микропровода со стеклоизоляцией заключаются в комбинации превосходных электромагнитных свойств (очень высокая магнитная проницаемость, малая коэрцитивная напряженность поля и малые потери на вихревые токи) с хорошей механической прочностью, гибкостью и коррозионной стойкостью при одновременно высокой максимально возможной температуре.
Отказ от дополнительной измерительной катушки обеспечивает возможность простого и экономичного изготовления.
Уже обоснованная в эффекте измерений линейность характеристики обеспечивает возможность использования простой и экономичной электроники оценивания.
Уже обоснованная в эффекте измерений линейность характеристики обуславливает высокую первоначальную чувствительность датчика.
Применение микропроводов для соответствующего изобретению датчика обеспечивает возможность компактной конструкции датчика при малой массе.
За счет очень малого требуемого места для размещения микропровод может встраиваться непосредственно в компоненты, не оказывая существенного влияния на механические свойства объекта. Кроме того, применение такого провода обеспечивает возможность произвольного формообразования.
За счет состава применяемых материалов микропровода результирующая характеристика соответствующего изобретению датчика может оптимизироваться в соответствии с конкретными применениями.
В отношении других предпочтительных форм выполнения соответствующего изобретению устройства во избежание повторений может быть сделана ссылка на общую часть описания, а также приложенные пункты формулы изобретения.
Наконец, следует явно сослаться на то, что вышеописанные примеры выполнения соответствующего изобретению устройства, для применения соответствующего изобретению способа, служат только пояснению заявленных решений, которые, однако, не ограничиваются этими примерами выполнения.
Перечень ссылочных позиций
Фиг. 1а
1: компоновка датчика
2: магнитомягкий удлиненный элемент
3: объект измерений
4: постоянный магнит
5: электроника оценивания/измерительный мост
Фиг. 1b
2: основной элемент
3: объект измерений
4: постоянный магнит
5: электроника оценивания/измерительный мост
6: плата с электроникой и основным элементом
Фиг. 2
2: основной элемент
4: постоянный магнит
5: электроника оценивания/измерительный мост
Фиг. 3
Магнитное поле Н
Напряженность Н магнитного поля
Индуктивность L
Фиг. 4
Напряженность Н поля
Фиг. 5
Сектор I: спадающий фронт µ(Н)-кривой
Сектор II: зависимость напряженности поля (Hm) постоянного магнита от расстояния до поверхности магнита
Сектор III: зависимость µ(d) - зависимость магнитной проницаемости от расстояния d до магнита
Сектор IV: линейная интерполированная зависимость µ(d).
Функции µ(Н)
Н(х)
Сектор I: спадающий фронт µ(Н)-кривой
Сектор II: зависимость напряженности поля (Hm) постоянного магнита от расстояния до поверхности магнита х
Сектор III: зависимость µ(d) - зависимость магнитной проницаемости от расстояния до магнита
Сектор IV: линейная интерполированная зависимость µ(d).
Фиг. 6
Две тестовые катушки, катушки 6, 6А1 и 6А2
Трубка 7
Выводы А1 и А2
Основной элемент, элемент 2
Расстояние h
Объект 3 измерений
Рабочая зона AZ, AZmin, AZmax
Максимальное значение Lmax
Фиг. 7
Фиг. 8а
1: компоновка датчика
2: основной элемент
5: электроника оценивания/измерительный мост
Фиг. 8b
2: основной элемент
5: электроника оценивания/измерительный мост
Фиг. 9
Фиг. 10
Фиг. 11
2: основные элементы
4: постоянный магнит
6: плата с электроникой и основным элементом
13: места контакта К1 … К7
14: сопротивления R
15: операционный усилитель
16: сопротивление R0
17: осциллятор
18: ярмо
Фиг. 12а
2: основные элементы
4: постоянный магнит
7: подводящая линия к основным элементам
13: места контакта К1 … Кn
19: источник переменного тока
20: внутреннее сопротивление Ri
21: подложка
Фиг. 12b
2: основные элементы
4: постоянный магнит
7: подводящая линия к основным элементам
13: места контакта К1 … Кn
19: источник переменного тока
20: внутреннее сопротивление Ri
21: подложка
22: мультиплексор
23: микроконтроллер
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И/ИЛИ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНО ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА | 2007 |
|
RU2460044C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И/ИЛИ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ИЗМЕРЕНИЯ | 2009 |
|
RU2497080C2 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИИ ИНДУКТИВНОГО ДАТЧИКА ПОЛОЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2555200C2 |
| ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА | 2023 |
|
RU2816442C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| ТОКОВИХРЕВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2000 |
|
RU2207499C2 |
| ДАТЧИК ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ | 2013 |
|
RU2552124C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ИЗМЕРИТЕЛЬ ТЕЧЕНИЙ | 2016 |
|
RU2620912C1 |
| Устройство выявления микромагнитных частиц в материале сварного шва сталей аустенитного класса | 2024 |
|
RU2829469C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЗВУКОСНИМАТЕЛЬ | 2008 |
|
RU2368960C1 |










Изобретение относится к измерительной технике, представляет собой способ и устройство для регистрации магнитных полей и может использоваться для определения положения объектов. При реализации способа используется удлиненный элемент из магнитомягкого материала. В зависимости от положения объекта относительно элемента устанавливается магнитное поле, определяющее магнитную проницаемость (µ) материала элемента, при этом рабочий диапазон находится на спадающем фронте кривой магнитной проницаемости. Элемент соединен с электроникой, измеряющей импеданс магнитомягкого материала, линейно зависящий от положения объекта относительно элемента. 2 н. и 23 з.п. ф-лы, 15 ил.
1. Способ регистрации магнитных полей, в особенности для регистрации положения объектов, с помощью предпочтительно удлиненного магнитомягкого элемента (2), который соединен с электроникой, причем с помощью электроники измеряется импеданс магнитомягкого материала, отличающийся тем, что
используют магнитное поле, при этом за счет положения объекта, который находится в определенном расположении относительно магнитомягкого материала, в месте магнитомягкого материала устанавливают магнитное поле, посредством чего магнитная проницаемость µ магнитомягкого материала устанавливается в зависимости от магнитного поля и, тем самым, от положения объекта, причем рабочий диапазон лежит на спадающем фронте кривой магнитной проницаемости магнитомягкого материала, за счет чего существует по существу линейная взаимосвязь между положением и импедансом.
2. Способ по п.1, отличающийся тем, что посредством изменения магнитной проницаемости определяют относительное положение объекта (3) измерений относительно удлиненного элемента (2), причем объект (3) измерений содержит постоянный магнит или электромагнит (4) и причем учитывают распределение магнитного поля вдоль элемента (2).
3. Способ по п.1, отличающийся тем, что магнитное поле создают магнитом, постоянным магнитом и/или электромагнитом.
4. Способ по любому из пп 1-3, отличающийся тем, что магнитное поле создают постоянным током, который протекает через магнитомягкии элемент.
5. Способ по п.3, отличающийся тем, что объект содержит постоянный магнит или электромагнит.
6. Способ по п.4, отличающийся тем, что с магнитомягким материалом жестко ассоциирован постоянный магнит или электромагнит и объект состоит из магнитомягкого материала.
7. Способ по любому из пп.1-3, 5, 6, отличающийся тем, что рабочая зона (AZ) элемента (2) при различных относительных положениях объекта (3) измерений по отношению к удлиненному элементу (2) находится на спадающем фронте µ(Н)-кривой между точками 1 и 2, причем на характеристике µ(Н) точка 1 соответствует магнитной проницаемости рядом с выводом A1, a точка 2 - магнитной проницаемости рядом с выводом A2 элемента (2).
8. Способ по п.7, отличающийся тем, что распределение магнитного поля вдоль элемента (2) измеряют по меньшей мере одной тестовой катушкой (6), причем длина тестовой катушки (6) короче, в частности на 10%, чем длина элемента (2).
9. Способ по любому из пп.1-3, отличающийся тем, что дополнительно содержит этапы, на которых:
- предоставляют тестовое устройство, которое содержит удлиненный элемент (2) из магнитомягкого материала с двумя выводами A1 и А2, который размещен на носителе и вдвинут в трубку (7), и постоянный магнит (4), а также две тестовые катушки (6А1 и 6А2), которые навиты на упомянутую трубку (7), причем тестовые катушки (6) размещены рядом с выводами A1 и А2 элемента (2); причем для исключения измерения краевых эффектов обе катушки (6) сдвинуты на расстояние h относительно выводов А1 и А2;
- объект (3) измерений сдвигают на расстояние d от вывода А2 по оси в продольном направлении элемента (2);
- индуктивности тестовых катушек (6А1 и 6А2) регистрируют с помощью измерительного моста;
- постоянный магнит сдвигают от вывода А2 по оси в продольном направлении элемента (2) до тех пор, пока импедансы тестовых катушек 6А1 и 6А2 не начнут изменяться; это положение соответствует минимальному расстоянию до магнита и, тем самым, нижней границе диапазона измерений и описывает рабочую зону AZmin;
- постоянный магнит смещают далее по оси в продольном направлении элемента (2), пока измеренная индуктивность тестовой катушки 6А1 не достигнет максимального значения Lmax; это положение соответствует максимальному расстоянию до магнита и, тем самым, верхней границе диапазона измерений и описывает рабочую зону AZmax; причем
- чтобы гарантировать, что рабочая зона AZ находится на спадающем фронте µ(Н)-кривой, диапазон измерений ограничивают на 0,9*Lmax;
- после установления рабочей зоны при определенном объекте измерений и определенных параметрах элемента тестовое устройство может затем быть удалено, и датчик, тем самым, готов к использованию.
10. Способ по п.1, отличающийся тем, что элемент одновременно запитывают переменным током и постоянным током.
11. Устройство для регистрации магнитных полей, в особенности для регистрации положения объектов, с помощью предпочтительно удлиненного магнитомягкого материала, который соединен с электроникой, причем посредством электроники определяется/измеряется импеданс (добротность) магнитомягкого материала, в особенности для реализации способа по любому из пп.1-10, отличающееся тем, что используется магнитное поле, причем за счет положения объекта измерения, который находится в определенном расположении относительно магнитомягкого материала, в месте магнитомягкого материала устанавливается магнитное поле, причем магнитная проницаемость устанавливается/получается в зависимости от магнитного поля и, тем самым, в зависимости от положения, и причем магнитная проницаемость изменяет получаемый в результате этого измеряемый импеданс, причем рабочий диапазон лежит на спадающем фронте µ(Н)-кривой, за счет чего существует по существу линейная взаимосвязь между расстоянием и импедансом.
12. Устройство по п.11, отличающееся тем, что магнитное поле создается магнитом, постоянным магнитом и/или электромагнитом.
13. Устройство по п.11, отличающееся тем, что объект измерений перемещается относительно магнитомягкого материала, причем магнитное поле в месте магнитомягкого материала изменяется из-за перемещения объекта измерений.
14. Устройство по п.13, отличающееся тем, что импеданс изменяется в зависимости от магнитного поля и, тем самым, от расстояния, в частности ввиду перемещения объекта измерений.
15. Устройство по п.11, отличающееся тем, что магнитомягкий материал является аморфным, нанокристаллическим или кристаллическим материалом.
16. Устройство по любому из пп 11-15, отличающееся тем, что применяется удлиненная пленка или полоса или участок провода.
17. Устройство по п.16, отличающееся тем, что применяется провод со стеклоизоляцией.
18. Устройство по любому из пп.11-15 или 17, отличающееся тем, что осуществляется питание переменным током или переменным напряжением.
19. Устройство по п.18, отличающееся тем, что предусмотрено дополнительно питание постоянным током, чтобы установить рабочий диапазон.
20. Устройство по п.18, отличающееся тем, что предусмотрено дополнительное питание постоянным током, чтобы осуществлять измерение температуры и температурную компенсацию.
21. Устройство по п.16, отличающееся тем, что магнит приближается с различных сторон, предпочтительно в направлении или параллельно оси провода, а также поперечно к нему.
22. Устройство по любому из пп.11-15, 17, 19-21, отличающееся тем, что изменение импеданса измеряется с помощью тестовой катушки в различных положениях.
23. Устройство по п.22, отличающееся тем, что тестовая катушка для установки рабочего диапазона запитывается постоянным током.
24. Устройство по п.11, отличающееся тем, что применяется проводящая петля.
25. Устройство по п.11, отличающееся тем, что диапазон измерений увеличивается посредством последовательного расположения отдельных элементов.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 5994899 A, 30.11.1999 | |||
| ДАТЧИК ДЛЯ РЕГИСТРАЦИИ ФЕРРОМАГНИТНОГО ОБЪЕКТА | 2005 |
|
RU2284527C1 |
| Устройство для измерения температуры | 1979 |
|
SU773449A1 |
| Каримова, Гульсина Витальевна | |||
| Бистрабильный литой аморфный микропровод из Fe-, Fe-Co-сплавов в стеклянной оболочке и его применение в магнитометрии: диссертация. | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ижевск, 2006 | |||
| Ручной прибор для загибания кромок листового металла | 1921 |
|
SU175A1 |
| US 7375515 B2, 20.05.2008 | |||

