ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области медицинских устройств и, в частности, к медицинскому катетеру и трехмерной (3D) системе магнитного позиционирования.
УРОВЕНЬ ТЕХНИКИ
Сердечно-сосудистое заболевание является серьезной угрозой для здоровья человека из-за его высокой распространенности, неминуемой инвалидности и смертности. В настоящее время малоинвазивная интервенционная хирургия признана относительно эффективным подходом к клинической диагностике и лечению сердечнососудистого заболевания. Минимально инвазивная интервенционная хирургия предполагает использование медицинских катетеров различных конструкций, форм и размеров. При разработке и изготовлении медицинских катетеров, в зависимости от их предполагаемого использования, их предварительно сгибают в дистальном участке, придавая им различные формы, которые адаптируются к анатомическим формам особых поражений и облегчают их приведение в соответствие с ними. В последние годы разработано и внедрено в клиническое применение множество медицинских катетеров различной формы и с предварительно сформированными дистальными углами. Однако для людей с атипичной анатомией даже медицинские катетеры, изготовленные с предварительно сформированными дистальными формами, специально разработанными для особых анатомий, могут не соответствовать уникальным анатомическим особенностям пациента, и во время хирургических процедур часто требуется одна или несколько попыток использования других медицинских катетеров, имеющих различный предварительно сформированные формы. Это может увеличить хирургическую нагрузку на пациентов. Поэтому в последние годы разработаны медицинские катетеры с регулируемым дистальным изгибом, что позволяет многократно in vitro регулировать углы их дистального изгиба для адаптации к различным анатомическим формам.
Традиционное электрофизиологическое вмешательство проводится в двухмерном (2D) режиме, при котором медицинский работник продвигает дистальный конец медицинского катетера к очагу поражения у пациента под контролем аппарата рентгеновской визуализации в соответствии с инструкциями производителя. Однако эта операция требует много времени, недостаточно точна и рискованна. Даже хирургу с богатым опытом электрофизиологических вмешательств, потребуется повторная рентгеновская визуализация, чтобы определить форму сердца и, следовательно, расположение медицинского катетера. Это может привести к значительному радиационному воздействию как на пациентов, так и на хирурга.
Для преодоления этого были разработаны медицинские катетеры с возможностями тактильной чувствительности и магнитного определения местоположения и регулируемым изгибом, которые могут воспринимать информацию о контактной силе дистального конца катетера при контакте с тканью и о положении дистального конца, рассчитывать вектор контактной силы на основе этой информации и определять по вектору особую анатомию. Например, при прохождении дистального конца медицинского катетера через устье легочной вены направление вектора контактной силы будет испытывать скачок, по которому хирург может определить, что дистальный конец медицинского катетера в данный момент расположен в устье легочной вены. Медицинский катетер с возможностями магнитного определения местоположения может использоваться в сочетании с устройством 3-мерного позиционирования, которое может оценивать расположение ткани, с которой контактирует дистальный конец катетера, на электроанатомической карте по сигналу, указывающему положение дистального конца и вектор контактной силы, и таким образом обновлять электроанатомическую карту. Устройство 3-мерного позиционирования может также рассчитывать направление изгиба на основе информации о контактной силе дистального конца медицинского катетера с тканью и о положении дистального конца, что может служить руководством для хирурга и позволяет ему точно управлять медицинским катетером таким образом, чтобы дистальный конец медицинского катетера мог прилегать к целевой ткани. Кроме того, степень прилегания дистального конца к ткани можно оценить без использования рентгеновского излучения, что снижает радиационное воздействие как на хирурга, так и на пациента и приводит к повышению хирургической безопасности. Однако существующие медицинские катетеры такого типа связаны с проблемой неоптимальной точности определения местоположения из-за нечувствительного позиционирования магнитных датчиков.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание медицинского катетера и трехмерной (3D) системы магнитного позиционирования, целью которой является обеспечение более точного контроля над медицинским катетером за счет точного определения местоположения секции головки медицинского катетера с использованием магнитных датчиков и отображения его положения, что позволяет более точно провести интервенционную процедуру с использованием катетера. Кроме того, можно избежать радиационного воздействия как на хирурга, так и на пациента, что повышает хирургическую безопасность.
Для этого настоящее изобретение предлагает медицинский катетер, содержащий корпус катетера, первый магнитный датчик и второй магнитный датчик, при этом корпус катетера содержит последовательно соединенные вдоль его оси секцию головки, секцию, регулируемую по изгибу, и прямую секцию, при этом первый и второй магнитные датчики расположены на секции головки.
Как вариант, первый и второй магнитные датчики могут быть ориентированы под углом друг к другу.
Как вариант, угол ориентации, между первым и вторым магнитными датчиками, может составлять от 5° до 175°.
Как вариант, секция головки может содержать конструктивный элемент, имеющий проксимальный конец, соединенный с регулируемой по изгибу секцией, где первый магнитный датчик расположен на конструктивном элементе.
Как вариант, конструктивный элемент может определять первый канал, ось которого расположена под углом к оси конструктивного элемента, при этом первый магнитный датчик по меньшей мере частично расположен в первом канале.
Как вариант, второй магнитный датчик может быть расположен на конструктивном элементе.
Как вариант, конструктивный элемент дополнительно может образовывать второй канал, который разнесен с первым каналом по окружности вокруг конструктивного элемента и имеет ось, которая расположена под углом к оси первого канала, при этом второй магнитный датчик по меньшей мере частично размещен во втором канале.
Как вариант, ось второго канала может быть выполнена параллельной оси конструктивного элемента.
Как вариант, конструктивный элемент может быть выполнен из ферромагнитного материала, при этом второй магнитный датчик содержит катушку индуктивности, витки которой по меньшей мере частично намотаны на внешнюю окружную поверхность конструктивного элемента.
Альтернативно, конструктивный элемент может содержать неферромагнитный корпус и трубку с ферромагнитным сердечником, расположенную над корпусом, при этом первый канал образован в корпусе, а второй магнитный датчик представляет собой катушку индуктивности, витки которой по меньшей мере частично намотаны на внешней окружной поверхности конструктивного элемента.
Как вариант, угол между осью первого канала и осью конструктивного элемента может составлять от 5° до 10°.
Как вариант, конструктивный элемент может образовывать один упомянутый первый канал и три вторых канала, которые разнесены по окружности друг от друга, при этом по меньшей мере один из вторых каналов расположен под углом к первому каналу, а в радиальном сечении конструктивного элемента каждый из вторых каналов имеет по меньшей мере частично открытый контур.
Как вариант, вторые каналы могут быть выполнены с возможностью размещения в них второго магнитного датчика, или прохождения через них второго магнитного датчика и его проводника, или протекания через них среды, при этом по окружности конструктивного элемента один из трех вторых каналов противоположен первому каналу, а остальные два вторых канала расположены на противоположных сторонах первого канала, и при этом в радиальном сечении конструктивного элемента контур каждого из вторых каналов содержит дуговой край и два прямых края, продолжающиеся от соответствующих концов дугового края.
Как вариант, прямые края второго канала, который противоположен первому каналу, могут быть параллельны линии, соединяющей центр первого канала и центр дугового края конкретного второго канала, противоположного первому каналу, при этом прямые края одного из двух оставшихся вторых каналов перпендикулярны этой линии, при этом прямые края другого канала наклонены относительно линии, а расстояние от центра дугового края другого канала до центра дугового края второго канала, противоположного первому каналу, меньше расстояния от центра дугового края другого канала до центра первого канала.
Как вариант, секция головки может содержать электрод головки, расположенный на дистальном конце секции головки, при этом электрод головки образует третий канал, а второй магнитный датчик по меньшей мере частично расположен в третьем канале.
Как вариант, первый и второй магнитные датчики могут быть расположены в шахматном порядке друг относительно друга как по окружности, так и в осевом направлении вдоль секции головки.
Как вариант, ось третьего канала может быть параллельна оси электрода головки.
Как вариант, секция головки может дополнительно содержать эластомер, снабженный тензодатчиком, при этом тензодатчик выполнен с возможностью определения величины внешней силы, действующей на секцию головки при ее деформировании.
Как вариант, медицинский катетер дополнительно содержит третий магнитный датчик и четвертый магнитный датчик, которые расположены внутри прямой секции на ее дистальном конце и ориентированы под углом друг к другу.
Как вариант, первый, второй, третий и четвертый магнитные датчики могут быть датчиками с пятью степенями свободы (5DoF).
С этой целью настоящее изобретение также обеспечивает трехмерную систему магнитного позиционирования, содержащую устройство позиционирования и медицинский катетер, как определено выше.
Устройство позиционирования содержит блок обработки положения и блок отображения. Блок обработки положения соединен с возможностью обмена данными как с первым, так и со вторым магнитными датчиками.
Блок обработки положения выполнен с возможностью получения информации о положении первого и второго магнитных датчиков и получения информации о положении секции головки на основе информации о положении первого и второго магнитных датчиков.
Блок отображения соединен с возможностью обмена данными с блоком обработки положения и выполнен с возможностью приема и отображения информации о положении секции головки.
Как вариант, если медицинский катетер дополнительно содержит третий и четвертый магнитные датчики, третий и четвертый магнитные датчики могут быть расположены в прямом участке на его дистальном конце и оба соединены с возможностью обмена данными с блоком обработки положения, при этом блок обработки положения дополнительно выполнен с возможностью получения информации о положении третьего и четвертого магнитных датчиков и получения информации о положении дистального конца прямой секции на основе информации о положении третьего и четвертого магнитных датчиков, а также информации о положении регулируемой по изгибу секции на основе информации о положении как секции головки, так и дистального конца прямой секции, и блок отображения выполнен с возможностью приема и отображения информации о положении регулируемой по изгибу секции.
Как вариант, блок обработки положения может быть выполнен с возможностью визуализации информации о положении секции головки и информации о положении регулируемой по изгибу секции, при этом блок отображения выполнен с возможностью приема и отображения визуализированной информации о положении. Альтернативно или дополнительно, блок обработки положения может быть также выполнен с возможностью определения ожидаемого направления изгиба регулируемой по изгибу секции на основе информации о положении секции головки.
Как вариант, медицинский катетер может дополнительно содержать тензодатчик, который расположен на секции головки, выполнен с возможностью определения величины внешней силы, действующей на секцию головки и вызывающей ее деформирование, и соединен с возможностью обмена данными с блоком обработки положения, при этом блок обработки положения дополнительно выполнен с возможностью получения вектора силы на секции головки на основе информации о положении секции головки и величины внешней силы на секции головки, и блок отображения выполнен с возможностью приема и отображения вектора силы.
По сравнению с предшествующим уровнем техники медицинский катетер и 3-мерная система магнитного позиционирования настоящего изобретения имеют следующие преимущества.
Медицинский катетер включает в себя корпус катетера, первый магнитный датчик и второй магнитный датчик. Корпус катетера включает в себя последовательно соединенные вдоль его оси секцию головки, регулируемую по изгибу секцию и прямую секцию. И первый, и второй магнитные датчики располагаются на секции головки. При проведении интервенционной процедуры медицинский катетер могут использовать в сочетании с устройством позиционирования, которое позволяет разместить секцию головки медицинского катетера в теле пациента. Кроме того, под контролем изображения оператор может точно управлять изгибом регулируемой по изгибу секции, что позволяет довести дистальный конец медицинского катетера до целевого участка и предотвратить радиационное воздействие как на оператора, так и на пациента. Поскольку оба магнитных датчика расположены на секции головки, можно более точно определить положение секции головки, а при регулировке изгиба медицинского катетера оба магнитных датчика вообще не будут затронуты. Это снижает риск поломки магнитных датчиков и обеспечивает надежность магнитного определения местоположения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопроводительные чертежи приведены для лучшего понимания настоящего изобретения и не ограничивают его объем в каком-либо смысле; на чертежах:
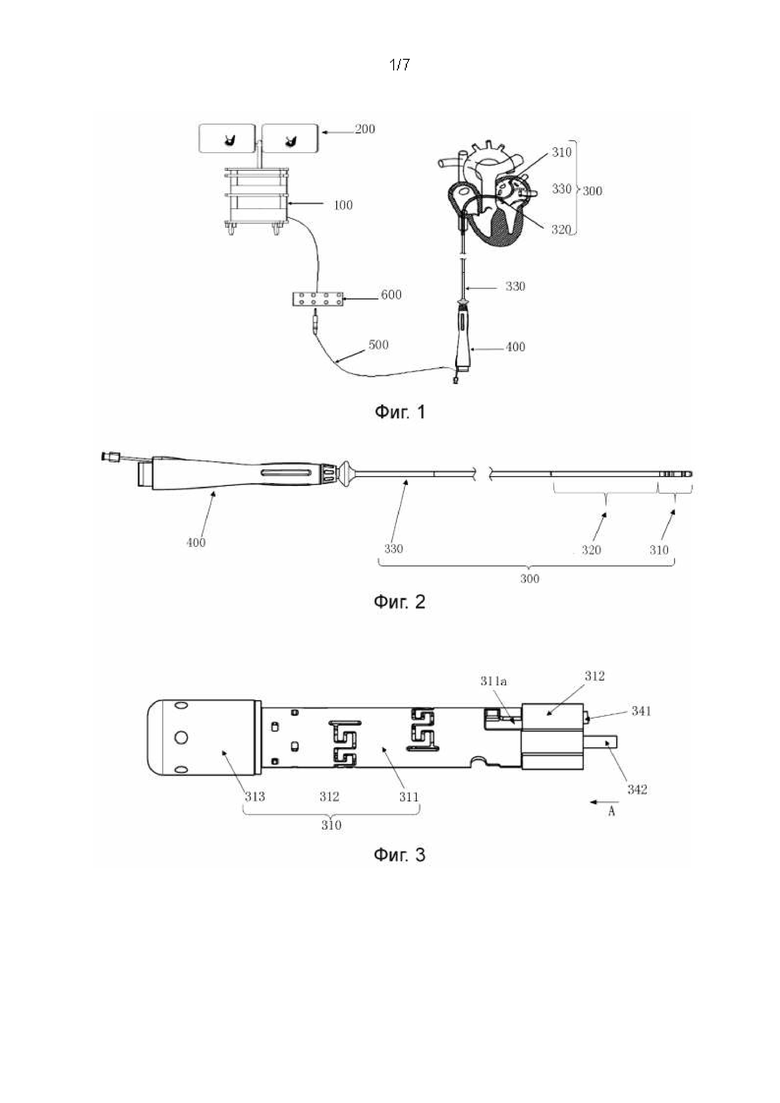
фиг. 1 схематически иллюстрирует сценарий применения трехмерной (3D) системы магнитного позиционирования по одному из вариантов осуществления настоящего изобретения;
фиг. 2 представляет схему, показывающую структуру медицинского катетера по первому варианту осуществления настоящего изобретения;
фиг. 3 представляет схему, показывающую структуру секции головки медицинского катетера в первом варианте осуществления настоящего изобретения;
фиг. 4 представляет схематическое изображение секции головки медицинского катетера показанного на фиг. 3, если смотреть в направлении А;
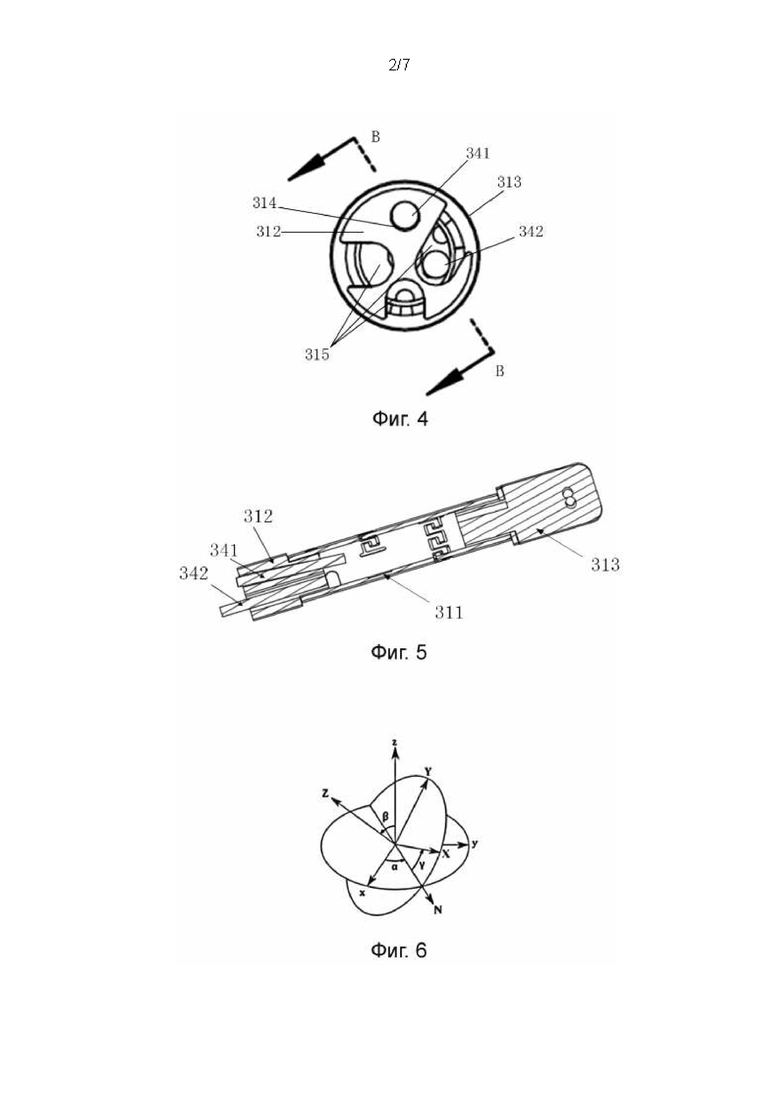
фиг. 5 представляет вид в разрезе секции головки медицинского катетера, показанного на фиг. 4, взятый вдоль В-В.;
фиг. 6 представляет схему, показывающую преобразование координат для вращения датчика 6DoF в первом варианте осуществления настоящего изобретения;
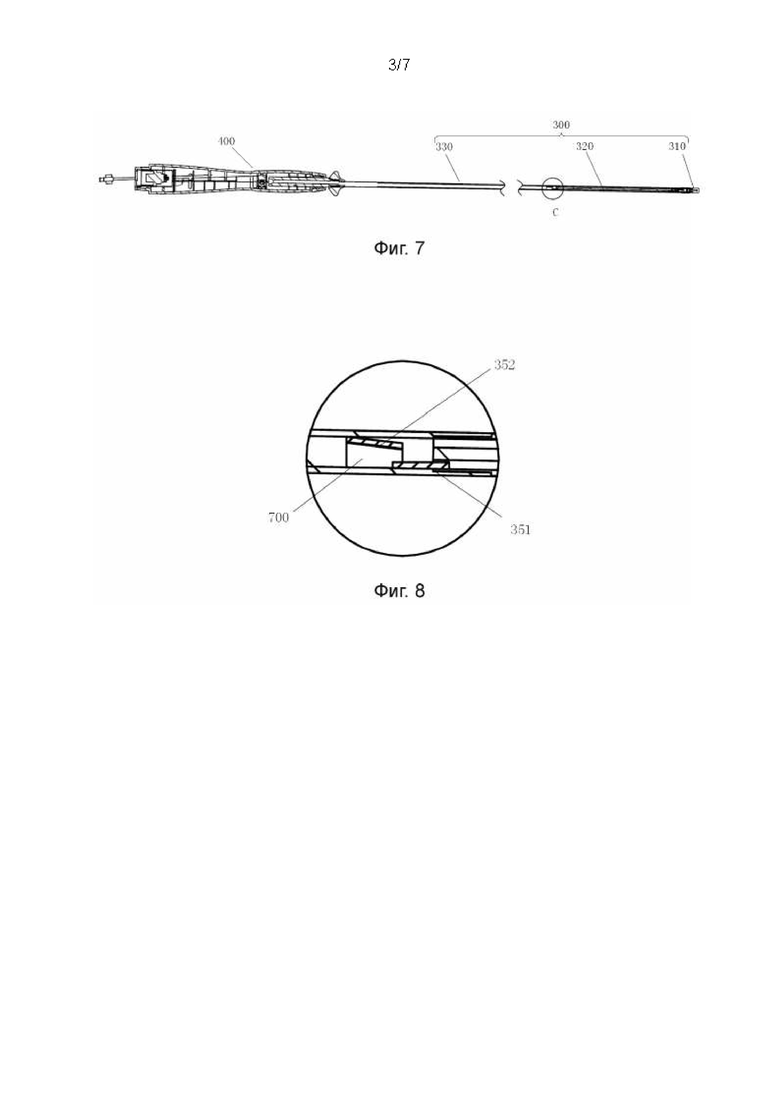
фиг. 7 представляет вид в разрезе медицинского катетера в первом варианте осуществления настоящего изобретения;
фиг. 8 представляет схематичный увеличенный вид части С медицинского катетера, показанного на фиг. 7;
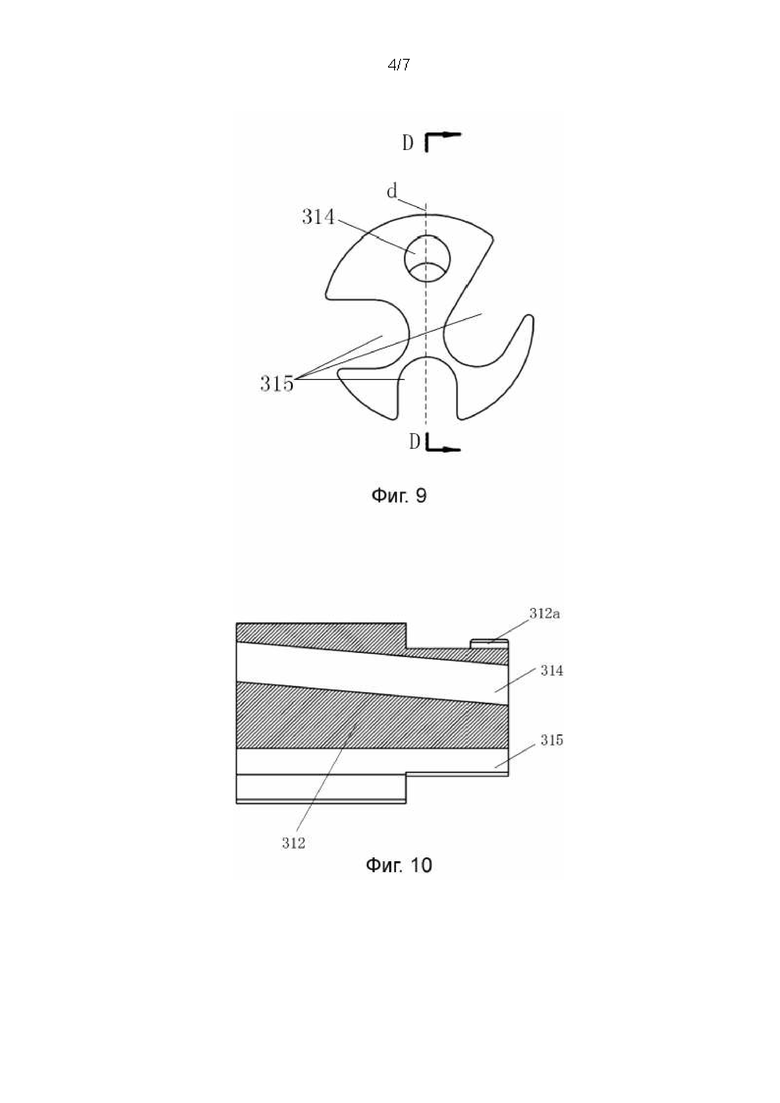
фиг. 9 представляет схему, показывающую торцевую поверхность конструктивного элемента в медицинском катетере по первому варианту осуществления настоящего изобретения;
фиг. 10 представляет вид в разрезе конструктивного элемента медицинского катетера, показанного на фиг. 9, взятый вдоль D-D;
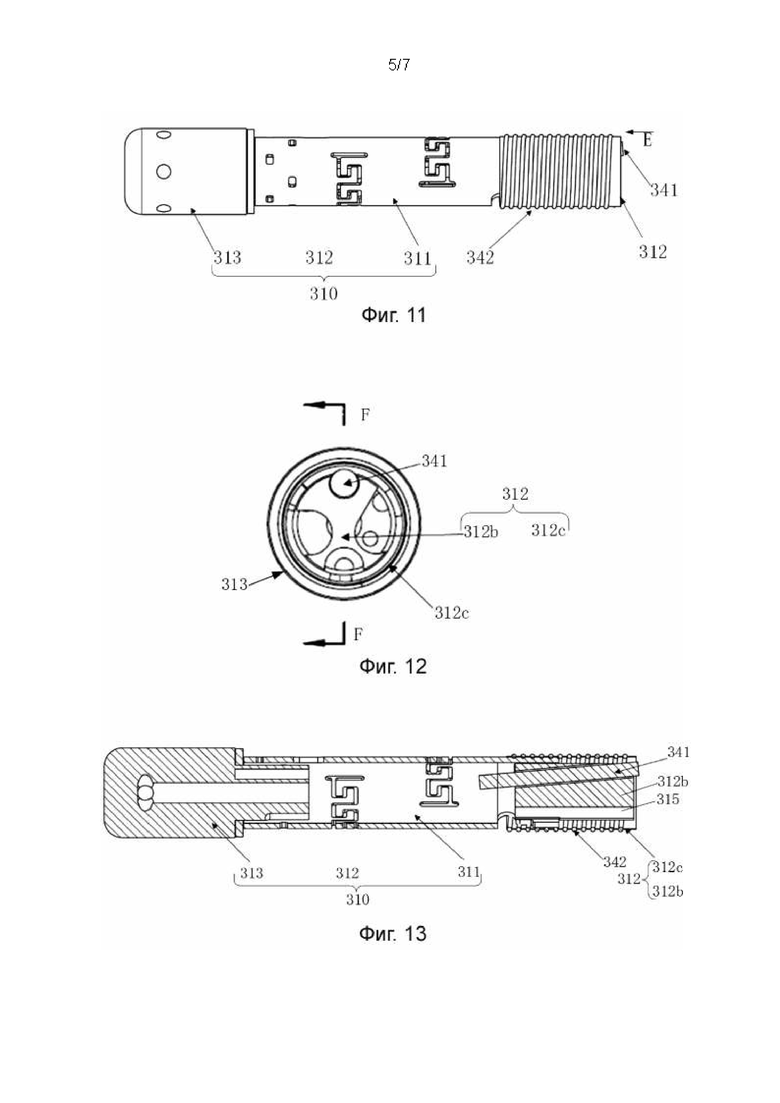
фиг. 11 представляет схему, показывающую структуру секции головки в медицинском катетере по второму варианту осуществления настоящего изобретения;
фиг. 12 представляет схематическое изображение секции головки в медицинском катетере, показанном на фиг. 12, если смотреть в направлении Е;
фиг. 13 представляет вид в разрезе секции головки в медицинском катетере, показанном на фиг. 12, взятый вдоль F-F;
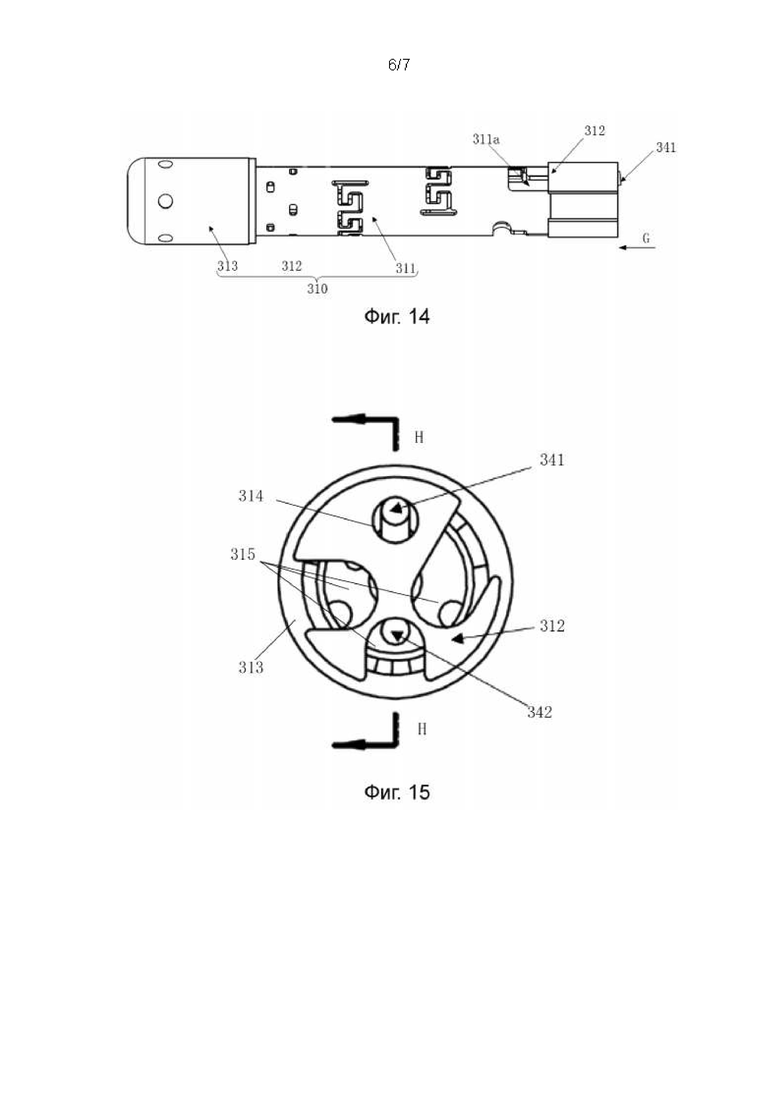
фиг. 14 представляет схему, показывающую структуру секции головки в медицинском катетере по третьему варианту осуществления настоящего изобретения;
фиг. 15 представляет схематическое изображение секции головки в медицинском катетере, показанном на фиг. 14, если смотреть в направлении G;
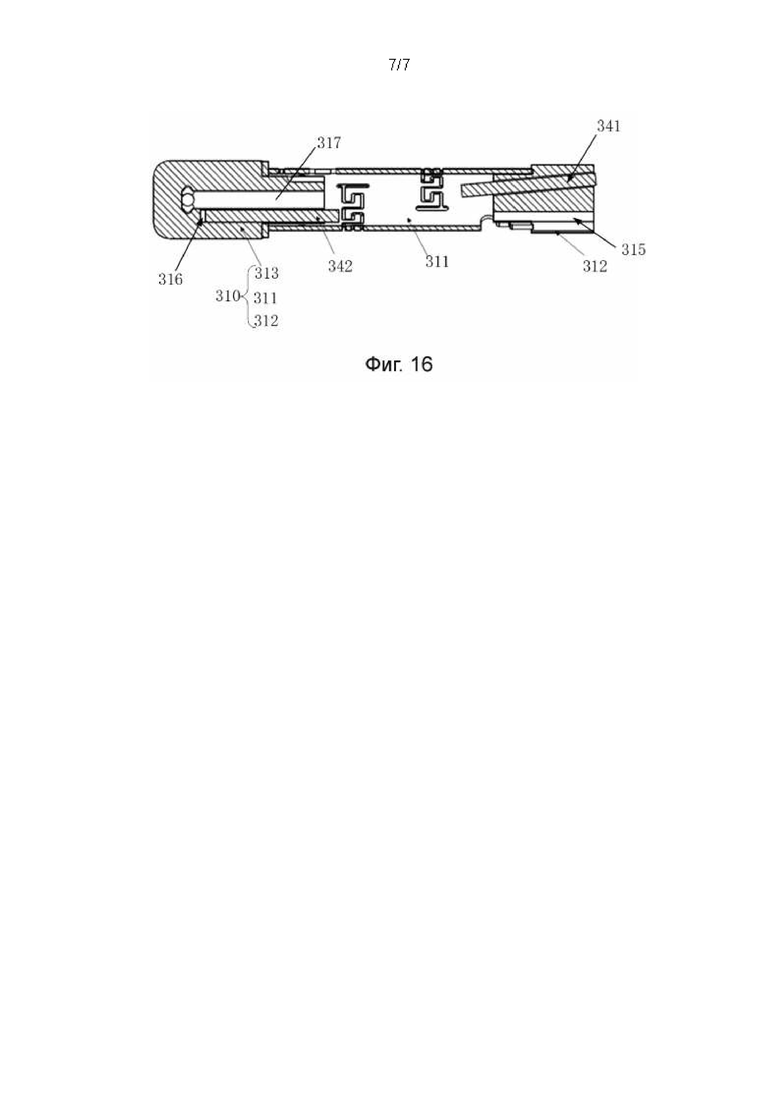
фиг. 16 представляет вид в разрезе секции головки в медицинском катетере, показанном на фиг. 15, взятом вдоль Н-Н.
ПОДРОБНОЕ ОПИСАНИЕ
Ниже будут описаны отдельные варианты осуществления настоящего изобретения на конкретных примерах. Основываясь на предоставленных в настоящем документе раскрытии и замыслах, специалист в данной области техники легко поймет другие преимущества и выгоды, обеспечиваемые настоящим изобретением. Настоящее изобретение также может быть осуществлено или применено иным образом в других вариантах осуществления, а также могут быть внесены различные модификации или изменения в детали, раскрытые в настоящем документе, с различных точек зрения или для различных применений, не отступая от сущности настоящего изобретения. Необходимо отметить, что сопроводительные чертежи приведены здесь только для того, чтобы схематично проиллюстрировать основную концепцию настоящего изобретения. Соответственно, они показывают только компоненты, относящиеся к настоящему изобретению, но не обязательно изображают все компоненты, а также их реальные формы и размеры в практических реализациях. На практике конфигурации, количество и относительные масштабы компонентов могут варьироваться произвольно, а их расположение может быть более сложным.
Далее каждый из вариантов осуществления описан как имеющий один или несколько технических признаков. Однако это не означает, что настоящее изобретение должно практически осуществляться обязательно со всеми такими техническими признаками или отдельно с некоторыми или всеми техническими признаками в любом из вариантов осуществления. Другими словами, пока настоящее изобретение может быть реализовано на практике, специалист в данной области техники может выбирать некоторые или все технические признаки в любом из вариантов осуществления или объединять некоторые или все технические признаки в различных вариантах осуществления на основании изложенного в настоящем документе и в зависимости от соответствующих конструктивных особенностей или требований практического применения. Таким образом, настоящее изобретение может быть реализовано более гибко.
В настоящем документе формы единственного числа включают ссылки на множественное число, а форма множественного числа «множество» означает «два или более», если из контекста явно не следует иное. Используемый в настоящем документе термин "или", обычно применяется в значении, включающем "и/или", если из контекста не следует иное. Термины "установка", "связь" и "соединение" следует трактовать в широком смысле. Например, соединение может быть постоянным, разъемным или неразъемным, либо механическим или электрическим, либо прямым или косвенным с одной или несколькими промежуточными средами, либо внутренней связью или взаимодействием между двумя элементами. Специалисты в данной области техники могут понять конкретные значения вышеупомянутых терминов в зависимости от их контекста. Термин "проксимальный конец" обычно относится к концу, расположенному ближе к оператору, а термин "дистальный конец" - обычно к концу, расположенному ближе к пациенту (т.е. к концу, который первым входит в тело пациента для доступа к его поражению).
В принципе, настоящее изобретение представляет собой трехмерную (3D) систему магнитного позиционирования, включающую в себя устройство позиционирования и медицинский катетер. Устройство позиционирования включает в себя блок обработки положения и блок отображения. Медицинский катетер включает в себя корпус катетера, первый магнитный датчик и второй магнитный датчик. Корпус катетера включает в себя секцию головки, регулируемую по изгибу секцию и прямую секцию, которые последовательно соединяются вдоль оси корпуса катетера. Как первый, так и второй магнитные датчики расположены на секции головки и соединены с возможностью обмена данными с блоком обработки положения. Блок обработки положения выполнен с возможностью получения информации о положении первого и второго магнитных датчиков и получения информации о положении секции головки на основе информации о положении первого и второго магнитных датчиков. Блок отображения соединен с возможностью обмена данными с блоком обработки положения и выполнен с возможностью приема и отображения информации о положении секции головки. Более предпочтительно, блок обработки положения может визуализировать информацию о положении секции головки, а блок отображения принимает и отображает визуализированную информацию о положении. Настоящее изобретение не ограничивается каким-либо особым подходом к визуализации информации о положении блоком обработки положения. Необходимо понимать, что информация о положении включает информацию о пространственном положении и информацию об ориентации. Медицинский катетер может представлять собой направляющую оболочку или электрофизиологический катетер. Электрофизиологический катетер может представлять собой радиочастотный (РЧ) абляционный катетер или катетер для картирования.
При использовании 3-мерной системы магнитного позиционирования для проведения интервенционных процедур положение и ориентация секции головки медицинского катетера в теле пациента могут отслеживаться в реальном времени с помощью первого и второго магнитных датчиков и одновременно отображаться на блоке отображения. Это позволяет более точно управлять медицинским катетером. Например, если медицинский катетер представляет собой направляющую оболочку, это может способствовать быстрому созданию направляющей траектории в теле пациента, или если медицинский катетер представляет собой электрофизиологический катетер, это может способствовать продвижению дистального конца медицинского катетера к целевому участку. Кроме того, можно избежать радиационного воздействия на пациента и хирурга, что повышает безопасность интервенционной процедуры. В частности, за счет размещения обоих магнитных датчиков на секции головки медицинского катетера можно получить более точную информацию о положении секции головки. Кроме того, размещение магнитных датчиков на секции головки предотвращает нагрузку и возможное разрушение во время регулировки изгиба регулируемой по изгибу секции, что обеспечивает надежность магнитного определения местоположения.
Цели, преимущества и признаки настоящего изобретения станут более очевидными после прочтения следующего более подробного описания настоящего изобретения, сделанного со ссылкой на сопроводительные чертежи. Необходимо отметить, что фигуры представлены в очень упрощенной форме, не обязательно в точном масштабе, и с единственной целью облегчить простое и понятное описание вариантов осуществления изобретения. Везде на нескольких видах одинаковые цифровые обозначения обозначают одинаковые элементы.
Как показано на фиг. 1, варианты осуществления настоящего изобретения относятся к трехмерной (3D) системе магнитного позиционирования, включающей в себя медицинский катетер и устройство позиционирования. Устройство позиционирования включает в себя блок 100 обработки положения и блок 200 отображения. С дополнительной ссылкой на фиг. 2, медицинский катетер включает в себя корпус 300 катетера и рукоятку 400 управления, соединенную с корпусом 300 катетера. Корпус 300 катетера включает в себя секцию 310 головки, регулируемую по изгибу секцию 320 и прямую секцию 330, которые последовательно соединяются вдоль оси корпуса 300 катетера. Прямая секция 330 имеет проксимальный конец, соединенный с рукояткой 400 управления, которая выполнена с возможностью управления изгибом регулируемой по изгибу секции 320. Медицинский катетер может представлять собой направляющую оболочку либо катетер для картирования или абляционный катетер.
Как показано на фиг. 3 и 4, медицинский катетер дополнительно включает в себя первый механизм магнитного позиционирования для получения информации о положении секции 310 головки. Необходимо понимать, что информация о положении включает информацию о пространственном положении и информацию об ориентации. Первый механизм магнитного позиционирования предусмотрен на секции 310 головки. Это преимущество заключается в том, что можно более точно определить положение секции 310 головки и что первый механизм магнитного позиционирования не будет подвержен негативному воздействию во время регулировки изгиба регулируемой по изгибу секции 320 (например, он может подвергнуться нагрузке и, возможно, сломаться и потерять свою функцию магнитного определения местоположения).
Согласно вариантам осуществления настоящего изобретения, первый механизм магнитного позиционирования включает в себя первый магнитный датчик 341 и второй магнитный датчик 342. Предпочтительно, как показано на фиг.5, первый и второй магнитные датчики 341, 342 ориентированы на секции 310 головки под углом друг к другу в диапазоне 5°-175° (включая 5° и 175°), при этом угол 90° является предпочтительным. Понятно, что под углом между двумя магнитными датчиками понимается угол, образованный осями двух магнитных датчиков, когда секция 310 головки принимает линейную форму.
При использовании в интервенционной процедуре и первый, и второй магнитные датчики 341, 342 соединены с возможностью обмена данными с блоком 100 обработки положения, например, проводником 500 и соединителем 600. Блок обработки положения 100 выполнен с возможностью получения информации о положении первого и второго магнитных датчиков 341, 342 и получения информации о положении секции 310 головки на основе информации о положении первого и второго магнитных датчиков 341, 342. Блок 200 отображения выполнен с возможностью приема и отображения информации о положении секции 310 головки, что позволяет оператору знать текущее положение секции 310 головки в режиме реального времени. Блок 100 обработки положения также выполнен с возможностью определения ожидаемого направления изгиба регулируемой по изгибу секции 320 на основе информации о положении секции 310 головки. Блок 200 отображения выполнен с возможностью приема и отображения ожидаемого направления изгиба регулируемой по изгибу секции 320, после чего оператор может манипулировать ручкой 400 управления для изгиба регулируемой по изгибу секции 320 в ожидаемом направлении. Это позволяет повысить точность управления медицинским катетером.
В качестве варианта, и первый, и второй магнитные датчики 341, 342 представляют собой датчики с 5 степенями свободы (5DoF), которые могут быть синтезированы в датчик с 6DoF. То есть это эквивалентно отслеживанию положения секции 310 головки с помощью одного датчика 6DoF. Таким образом, достигаются хорошие характеристики определения местоположения, а по сравнению с использованием «настоящего» датчика 6DoF синтезированный датчик является менее громоздким и недорогим, что позволяет уменьшить размеры медицинского катетера и снизить его стоимость.
В зависимости от конфигурации медицинского катетера блок 100 обработки положения может синтезировать информацию о положении одного датчика 6DoF из информации о положении первого и второго магнитных датчиков 341, 342 и вывести информацию о положении секции 310 головки из информации о положении датчика 6DoF. По настоящему изобретению, два датчика 5DoF могут быть синтезированы в датчик 6DoF с использованием известной технологии предшествующего уровня техники, подробное описание которой в настоящем документе не приводится.
Понятно, что синтезированный датчик 6DoF может свободно вращаться и перемещаться в пространстве, а его расположение, вращение и перемещение соответствуют расположению, вращению и перемещению секции 310 головки. Таким образом, положение и ориентация секции 310 головки могут быть точно определены с помощью датчика 6DoF, что приводит к повышению точности определения местоположения медицинского катетера, что помогает повысить точность управления медицинским катетером и способствует быстрому и точному продвижению дистального конца медицинского катетера к очагу поражения.
Информация об ориентации секции 310 головки в первую очередь используется для получения информации о ее угле, т.е. информации об угле датчика 6DoF. В общем, он может быть представлен матрицей поворота, вектором поворота, кватернионом или углами Эйлера, причем эти альтернативные представления могут быть преобразованы друг в друга. Для этого принято использовать углы Эйлера. В некоторых вариантах осуществления информация об ориентации секции 310 головки может быть представлена матрицей поворота. Например, при известном кватернионе q=(θ х у z)T в декартовой системе координат xyz, где θ - угол поворота, (xyz) - единичный вектор, х - координата по оси х, у - координата по оси у и z - координата по оси z, при повороте единичного вектора ω=(xyz) на угол θ, матрица поворота R может быть получена в соответствии с кватернионом как:

Эта матрица поворота R может быть представлена через углы Эйлера, обозначающие углы поворота вокруг соответствующих осей системы координат. Углы Эйлера используют для описания последовательности собственных вращений, необходимых для достижения новой системы отсчета, начиная с фиксированной системы отсчета, ориентация которой известна. Фиг. 6 показывает исходную систему отсчета xyz, оси которой обозначены как х, у, z, и новую систему отсчета XYZ, оси которой обозначены как Х, Y, Z, полученную вращением исходной системы отсчета. На фигуре N обозначает так называемую линию узлов, которая является пересечением плоскостей ху и XY.
В случае использования углов Эйлера для представления положения секции 310 головки, она может быть сначала описана следующей матрицей:

Уравнение (1-1) эквивалентно

где:

α - угол между осью х и осью N, представляющий величину поворота вокруг оси z;
β - угол между осью z и осью Z, представляющий величину поворота вокруг оси N; и
γ - угол между осью N и осью X, представляющий величину поворота вокруг оси Z.
В дальнейшем соответствующие углы Эйлера могут быть получены из матрицы поворота R как:
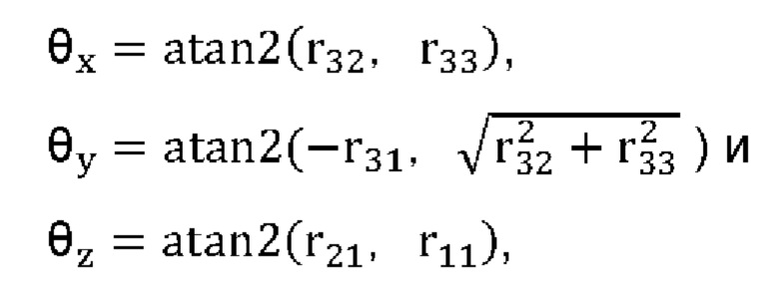
где θx, θу, θz - углы поворота вокруг осей х, у и z соответственно. По углам Эйлера можно определить положение датчика 6DoF, а значит, и положение секции 310 головки.
Специалисту в данной области техники должно быть понятно, что если два магнитных датчика (например, первый магнитный датчик 341 и второй магнитный датчик 342) удерживаются неподвижно и ориентированы под углом друг к другу, то можно определить пространственное положение каждого магнитного датчика. Например, генератор магнитного поля может быть предусмотрен на расстоянии от магнитных датчиков, и электрические токи будут индуцироваться в магнитных датчиках под действием магнитного поля, создаваемого генератором магнитного поля. Эти токи могут быть поданы обратно в блок 100 обработки положения, который затем может обрабатывать эти токи для определения положения магнитных датчиков в магнитном поле и, следовательно, их положений в пространстве. Когда два магнитных датчика удерживаются неподвижно, а угол между ними остается постоянным, пространственное положение секции 310 головки может быть определено по пространственным координатам двух магнитных датчиков в случае любого вращения медицинского катетера. Таким образом, секцию 310 головки можно отслеживать в режиме реального времени. В вариантах осуществления настоящего изобретения секция 310 головки может включать конструктивный элемент 312, а по меньшей мере один из магнитных датчиков, например первый магнитный датчик 341, может быть установлен на конструктивном элементе 312.
Дополнительно, согласно вариантам осуществления настоящего изобретения, секция 310 головки может быть способна деформироваться под действием внешней силы. На практике внешняя сила может представлять собой, например, контактную силу, возникающую в ответ на соприкосновение секции 310 головки с тканью в теле пациента. В этом случае медицинский катетер может дополнительно включать тензодатчик (не показан), расположенный на секции 310 головки, который может измерять величину контактной силы, оказываемой на секцию 310 головки тканью в теле пациента, когда секция 310 головки вступает в контакт с тканью и реагирует на ее деформирование. Тензодатчик 310 может быть соединен с возможностью обмена данными с блоком 100 обработки положения, который может быть дополнительно выполнен с возможностью определения вектора контактной силы на секции 310 головки на основе информации о положении секции 310 головки и величины контактной силы. На основании этого вектора силы оператор может оценить, насколько хорошо секция 310 головки прилегает к ткани в теле пациента.
В частности, если снова обратиться к фиг.3, то секция 310 головки может включать эластомер 311, который, при деформировании под действием внешней силы, вызывает деформирование секции 310 головки. Эластомер 311 может быть соединен в осевом направлении с конструктивным элементом 312, а проксимальный конец конструктивного элемента 312 может быть соединен с дистальным концом регулируемой по изгибу секции 320. Альтернативно, секция 310 головки может дополнительно включать электрод 313 головки, соединенный с дистальным концом эластомера 311. Эластомер 311 может быть выполнен из гибкого, легко деформируемого полимерного материала, что позволяет эластомеру 311 деформироваться в ответ на контактную силу, возникающую в результате контакта секции 310 головки с тканью в теле пациента. Соответственно, тензодатчик может быть закреплен на эластомере 311. Конструктивный элемент 312 может быть выполнен из нержавеющей стали или жесткого полимерного материала. Электрод 313 головки может быть выполнен из платиноиридиевого сплава и использоваться для восприятия электрофизиологических сигналов и/или для абляции.
Обычно эластомер 311 имеет наружный диаметр, который меньше наружного диаметра регулируемой по изгибу секции 320. Конструктивный элемент 312 может не только обеспечивать сносность эластомера 311 и электрода 313 головки с регулируемой по изгибу секцией 320, но и облегчать крепление первого механизма магнитного позиционирования (например, могут быть установлены как первый, так и второй магнитные датчики или только первый магнитный датчик, а второй магнитный датчик может быть установлен на электроде- 313 головки, как более подробно описано ниже). Кроме того, жесткость конструктивного элемента 312 позволяет ему обеспечивать защиту установленного на нем магнитного датчика (датчиков) от повреждений, которые могут быть вызваны напряженной работой секции 310 головки.
Понятно, что в случае, когда медицинский катетер выполнен в виде направляющей оболочки, секция 310 головки может не включать электрод 313 головки. Когда секция 310 головки включает электрод 313 головки, она обладает возможностями картирования и/или абляции.
Ссылаясь на фиг. 7 и 8, медицинский катетер может дополнительно включать в себя второй механизм магнитного позиционирования, расположенный внутри прямой секции 320 и находящийся на дистальном конце прямой секции 330 (т.е. рядом с регулируемой по изгибу секцией 320). Он выполнен с возможностью определения положения дистального конца прямой секции 330. Второй механизм магнитного позиционирования включает в себя третий магнитный датчик 351 и четвертый магнитный датчик 352. И третий, и четвертый магнитные датчики 351, 352 соединены с возможностью обмена данными с блоком 100 обработки положения (возможно, упомянутыми выше проводником 500 и соединителем 600). Блок обработки положения 100 выполнен с возможностью получения информации о положении третьего и четвертого магнитных датчиков 351, 352 и получения информации о положении дистального конца прямой секции 330 на основе информации о положении третьего и четвертого магнитных датчиков 351, 352, а также информации о положении регулируемой по изгибу секции 320 (о том, как она согнута) на основе информации о положении как секции 310 головки, так и дистального конца прямой секции 330. Блок 200 отображения выполнен с возможностью приема и отображения информации о положении регулируемой по изгибу секции 320.
Как и в случае с первым механизмом магнитного позиционирования, третий и четвертый магнитные датчики 351, 352 также ориентированы под углом друг к другу. Предпочтительно, чтобы третий и четвертый магнитные датчики 351, 352 были 5DoF-датчиками, которые синтезированы в 6DoF-датчик для отслеживания положения дистального конца прямой секции 330. Соответственно, блок 100 обработки положения выполнен с возможностью генерирования информации о положении одного датчика 6DoF на основе информации о положении третьего и четвертого магнитных датчиков 351, 352 и получения информации о положении дистального конца прямой секции 330 на основе информации о положении датчика 6DoF.
Блок обработки положения также выполнен с возможностью визуализации информации как о положении секции 310 головки, так и регулируемой по изгибу секции 320, и блок 200 отображения выполнен с возможностью приема и отображения визуализированной информации о положении.
Более подробно конструкция медицинского катетера будет описана ниже со ссылкой на несколько предпочтительных вариантов осуществления. В дальнейшем все варианты осуществления изобретения излагаются в контексте секции головки, включающей электрод головки (т.е. медицинского катетера с возможностью картирования и/или абляции), как одного из вариантов осуществления, и ниже будут описаны только отличия медицинского катетера от предшествующего уровня техники. Однако понятно, что приведенные ниже варианты осуществления изобретения не ограничивают его в каком-либо смысле.
<Вариант осуществления 1>
Возвращаясь к фиг. 3-5, 9 и 10, то в данном варианте осуществления изобретения первый и второй магнитные датчики 341, 342 расположены на конструктивном элементе 312. В частности, конструктивный элемент 312 определяет один первый канал 314 и по меньшей мере один второй канал 315, которые разнесены по окружности друг от друга. Кроме того, ось первого канала 314 образует угол с осью второго канала 315. Предпочтительно ось первого канала 314 образует угол с осью конструктивного элемента 312, который предпочтительно составляет от 5° до 10°, а ось второго канала 315 параллельна оси конструктивного элемента 312. Первый магнитный датчик 341 по меньшей мере частично размещен в первом канале 314, а второй магнитный датчик 342 по меньшей мере частично размещен в одном из вторых каналов 315. Таким образом, первый и второй магнитные датчики 341, 342 ориентированы под углом от 5° до 10° и расположены в шахматном порядке вдоль направления вдоль окружности конструктивного элемента 312 по отношению друг к другу. Это может уменьшить их взаимное влияние, что приведет к повышению точности определения местоположения. Понятно, что оси первого и второго каналов 314, 315 зависят от их соответствующих форм сечения, как будет описано ниже.
Дополнительно, с особой ссылкой на фиг.5, в данном варианте осуществления изобретения ось первого канала 314 расположена на расстоянии от оси конструктивного элемента 312 на расстояние, постепенно уменьшающееся от проксимального к дистальному. Предпочтительно первый магнитный датчик 341 дистально проходит из первого канала 314 в эластомер 311, а второй магнитный датчик 342 проксимально проходит из второго канала 315 в регулируемую по изгибу секцию 320. Это предпочтительно тем, что позволяет уменьшить осевую длину конструктивного элемента 312, что может уменьшить влияние на деформирование секции 310 головки и увеличить пространственное использование.
Поскольку секция 310 головки включает в себя электрод 313 головки, в ней может быть три вторых канала 315, один из которых может быть выполнен с возможностью приема второго магнитного датчика 342. Еще один из вторых каналов 315 может быть выполнен с возможностью прохода датчика и/или других проводников (например, проводника датчика силы, проводника датчика температуры и/или проводника электрода 313 головки), а оставшийся один из вторых каналов 315 может быть выполнен с возможностью ввода среды для охлаждения электрода 313 головки -, например, физиологического раствора. Понятно, что регулируемая по изгибу секция 320 может представлять собой многопросветную трубку, имеющую просветы, каждый из которых соответствует одному из трех вторых каналов 315. Регулируемая по изгибу секция 320 может иметь известную из предшествующего уровня техники конструкцию, и ее подробное описание в настоящем документе не приводится.
Продолжая со ссылкой на фиг. 9, в радиальном сечении конструктивного элемента 312 первый канал 314 может иметь круглую, эллиптическую или другую правильную форму. Вторые каналы 315 могут быть профилированными, и каждый из них может иметь по меньшей мере частично открытый контур. Под "открытым" подразумевается, что контуры вторых каналов 315 не замкнуты. Средний из вторых каналов 315 расположен напротив первого канала 314, а остальные два вторых канала 315 находятся на противоположных сторонах первого канала 314. Кроме того, контур каждого второго канала 315 включает в себя дуговой край и два прямых края, проходящих от соответствующих концов дугового края параллельно друг другу. В данном варианте осуществления изобретения прямые края второго канала 315, расположенного напротив первого канала 314 (т.е. среднего второго канала 315), параллельны линии d, соединяющей центр первого канала 314 и центр дугового края конкретного второго канала 315. Прямые края одного из вторых каналов 315 рядом с первым каналом 314 перпендикулярны линии d, а прямые края другого наклонены относительно линии d. Кроме того, дуговой край другого находится ближе ко второму каналу 315 относительно первого канала 314, т.е. расстояние от центра его дугового края до центра дугового края второго канала 315 относительно первого канала 314 меньше, чем расстояние от центра его дугового края до центра первого канала 314. Например, как показано на фиг.9, прямые края второго канала 315 слева от первого канала 314 перпендикулярны линии d, а прямые края второго канала 315 справа от первого канала 314 наклонены вверх. Такая конфигурация способна улучшить пространственное использование конструктивного элемента 312, увеличить угол между первым и вторым магнитными датчиками 341, 342 при заданном радиальном размере конструктивного элемента 312 и вместить расположение различных выводов, проложенных в корпусе катетера. Необходимо отметить, что в данном варианте осуществления изобретения оси вторых каналов 315 относятся к прямым линиям, проходящим через центры их соответствующих дуговых краев.
Кроме того, в данном варианте осуществления изобретения третий и четвертый магнитные датчики 351, 352 могут быть расположены любым подходящим образом в дистальном конце прямой секции 330, если они ориентированы под нужным углом относительно друг друга. Например, третий магнитный датчик 351 может быть прикреплен к внутренней стенке прямой секции 330 таким образом, чтобы быть параллельным оси прямой секции 330. Четвертый магнитный датчик 352 может быть наклонно прикреплен к прямой секции 330 с помощью крепления 700 в виде косого паза. Альтернативно, прямая секция может представлять собой двухслойную трубку, включающую в себя внутреннюю трубку, определяющую на своей внешней поверхности два косых паза, ориентированных под углом друг к другу, которые вмещают соответственно третий и четвертый магнитные датчики 351, 352.
Необходимо отметить, что медицинский катетер может дополнительно включать в себя внешнюю гильзу (не показана). Как правило, внешний диаметр эластомера 311 меньше внешнего диаметра регулируемой по изгибу секции 320, а максимальный внешний диаметр конструктивного элемента 312 может быть равен внешнему диаметру регулируемой по изгибу секции 320. Выступ 312а запора на дистальном конце конструктивного элемента 312 может зацеплять канавку 311а запора на проксимальном конце эластомера 311, и внешняя гильза может быть надета на эластомер 311 и дистальный конец конструктивного элемента 312 с последующим нанесением между ними клея для укрепления соединения между эластомером 311 и конструктивным элементом 312. После сборки внешней гильзы секция 310 головки может иметь гладкую, аккуратную наружную поверхность.
<Вариант осуществления 2>
Данный вариант осуществления отличается от варианта осуществления 1 тем, что, как показано на фиг. 11-13, конструктивный элемент 312 выполнен ферромагнитным. Первый магнитный датчик 341 по меньшей мере частично расположен в первом канале конструктивного элемента 312, а второй магнитный датчик 342 включает катушку индуктивности, витки которой по меньшей мере частично намотаны на внешней окружной поверхности конструктивного элемента 312. Таким образом, два из трех вторых каналов 315 могут быть использованы для прохождения через них различных проводников, а оставшийся может служить средним каналом. По сравнению с вариантом осуществления 1, настоящий вариант осуществления выгодно отличается тем, что конструктивный элемент 312, который является жесткой частью секции 310 головки, имеет уменьшенную осевую длину, тем самым обеспечивая гибкую реакцию катетера в теле пациента и максимизируя (острый) угол между первым и вторым магнитными датчиками 341, 342. Кроме того, длина первого магнитного датчика 341, вставленного в эластомер 311, может быть отрегулирована для уменьшения влияния на деформирование секции 310 головки. Намотка катушка индуктивности может быть выполнена из эмалированного провода. Альтернативно, она может быть выполнена из проводящего металла и иметь диэлектрик, нанесенный между смежными витками.
В некоторых вариантах осуществления конструктивный элемент 312 может быть выполнен в целом из ферромагнитного материала. Альтернативно, в других вариантах осуществления, как показано на фиг. 11-13, конструктивный элемент 312 представляет собой собранную конструкцию и включает корпус 312b и трубку с ферромагнитным сердечником 312 с. Корпус 312b сам по себе является неферромагнитным и определяет здесь первый канал 314 и второй канал 315. Трубка с ферромагнитным сердечником 312 с расположена над корпусом 312b таким образом, что второй магнитный датчик 342 по меньшей мере частично намотан на внешнюю окружную поверхность трубки с ферромагнитным сердечником 312 с. Такая конструкция позволяет увеличить размеры второго магнитного датчика, чтобы он мог генерировать более мощные сигналы, и тем самым повысить точность и чувствительность синтезированного магнитного датчика 6DoF.
В этом варианте осуществления максимальный внешний диаметр конструктивного элемента 312 может быть меньше внешнего диаметра регулируемой по изгибу секции 320, а внешняя гильза может дополнительно закрывать второй магнитный датчик 342.
<Вариант осуществления 3>
Данный вариант осуществления отличается от варианта осуществления 1 тем, что первый магнитный датчик 341 расположен на конструктивном элементе 312, а второй магнитный датчик 342 - на электроде 313 головки.
Конкретно, ссылаясь на фиг. 14-16, электрод 313 головки образует третий канал 316, предпочтительно имеющий ось, параллельную оси электрода 313 головки =. Понятно, что когда секция 310 головки принимает линейную форму (т.е. до деформирования), электрода 313 головки находится соосно с конструктивным элементом 312. В это время ось третьего канала 316 параллельна оси конструктивного элемента 312. Второй магнитный датчик 342 по меньшей мере частично расположен в третьем канале 316. Предпочтительно дистальный конец второго магнитного датчика 342 входит в третий канал 316, а его проксимальный конец выступает из третьего канала 316 в эластомер 311. Во-первых, это выгодно тем, что второй магнитный датчик не занимает пространство конструктивного элемента 312 или проксимального конца эластомера 311, что позволяет двум магнитным датчикам образовывать больший (острый) угол в ограниченном пространстве. В данном варианте осуществления изобретения угол между вторым и первым магнитными датчиками 342, 341 может составлять до 20°, что повышает точность определения местоположения магнитных датчиков. Во-вторых, второй магнитный датчик 342 расположен ближе к дистальному концу корпуса катетера, что повышает точность определения местоположения головки катетера. В-третьих, первый и второй магнитные датчики 341, 342 расположены в осевом направлении в шахматном порядке, что позволяет им меньше влиять друг на друга.
Предпочтительно, чтобы по окружности секции 310 головки первый канал 314 располагался в шахматном порядке относительно третьего канала 316 (т.е. оси первого и третьего каналов 314, 316 не находятся в одной плоскости). Это позволяет дополнительно уменьшить влияние между двумя магнитными датчиками. Третий канал 316 совмещен с одним из вторых каналов 315, например, со средним, который противостоит первому каналу 314, что облегчает прокладку вывода второго магнитного датчика 342 и обеспечивает проход для среды 317 в центре электрода 313 головки =.
Хотя настоящее изобретение было раскрыто выше, оно не ограничивается приведенным выше раскрытием. Специалисты в данной области техники могут вносить различные изменения и модификации в изобретение, не выходя за рамки его сущности и объема. Соответственно, предполагается, что любые и все подобные изменения и модификации также входят в объем настоящего изобретения, определенный прилагаемой формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАТЕТЕР С ОДНООСНЫМИ ДАТЧИКАМИ | 2011 |
|
RU2503408C2 |
| УСТРОЙСТВО И СПОСОБ ДОСТАВКИ ФИЗИОЛОГИЧЕСКОГО ДАТЧИКА | 2009 |
|
RU2478338C2 |
| ПРЕОБРАЗОВАНИЕ КООРДИНАТ ГРАФИЧЕСКИХ ОБЪЕКТОВ, ЗАРЕГИСТРИРОВАННЫХ НА МАГНИТНО-РЕЗОНАНСНОМ ИЗОБРАЖЕНИИ | 2013 |
|
RU2609221C2 |
| Определение и калибровка длины иглы для системы наведения иглы | 2012 |
|
RU2609203C2 |
| Узел иглы, включающий выровненный магнитный элемент | 2013 |
|
RU2669621C2 |
| ДВУХЦЕЛЕВОЙ КАТЕТЕР ЛАССО С ИРРИГАЦИЕЙ | 2009 |
|
RU2526964C2 |
| УСТРОЙСТВО КАЛИБРОВКИ НА ОСНОВЕ ИСПОЛНИТЕЛЬНОГО ЭЛЕМЕНТА ДЛЯ КАТЕТЕРА, РЕАГИРУЮЩЕГО НА ДАВЛЕНИЕ | 2010 |
|
RU2559016C2 |
| МЕДИЦИНСКОЕ УСТРОЙСТВО ДЛЯ НАГРЕВАНИЯ НАГРЕВАЕМОГО ОБЪЕМА, ЗАДАННОГО ПОВЕРХНОСТЬЮ | 2013 |
|
RU2641634C2 |
| СИСТЕМА И СПОСОБ ЭНДОЛЮМИНАЛЬНОГО ПРОТЕЗИРОВАНИЯ РАЗВЕТВЛЯЮЩИХСЯ СОСУДОВ И СОСУДОВ С ОТВЕТВЛЕНИЯМИ | 2004 |
|
RU2318474C1 |
| ВЫСОКОИНТЕНСИВНЫЙ СФОКУСИРОВАННЫЙ УЛЬТРАЗВУК С ЕМКОСТНЫМИ МИКРОМЕХАНИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЯМИ | 2013 |
|
RU2657950C2 |
Изобретение относится к области медицинских устройств и, в частности, к медицинскому катетеру и трехмерной (3D) системе магнитного позиционирования. Медицинский катетер содержит корпус катетера, первый магнитный датчик и второй магнитный датчик. Корпус катетера содержит последовательно соединенные вдоль его оси секцию головки, регулируемую по изгибу секцию и прямую секцию, при этом первый и второй магнитные датчики расположены на секции головки. Первый и второй магнитные датчики ориентированы под углом друг к другу. Секция головки содержит конструктивный элемент, имеющий проксимальный конец, соединенный с регулируемой по изгибу секцией, где первый магнитный датчик расположен на конструктивном элементе. Конструктивный элемент образует первый канал, ось которого расположена под углом к оси конструктивного элемента. Первый магнитный датчик по меньшей мере частично расположен в первом канале. Конструктивный элемент выполнен ферромагнитным, при этом второй магнитный датчик содержит катушку индуктивности, витки которой по меньшей мере частично намотаны на внешней окружной поверхности конструктивного элемента, или конструктивный элемент содержит неферромагнитный корпус и трубку с ферромагнитным сердечником, расположенную над корпусом, при этом первый канал образован в корпусе, а второй магнитный датчик представляет собой катушку индуктивности, витки которой по меньшей мере частично намотаны на внешней окружной поверхности конструктивного элемента. Трехмерная система магнитного позиционирования содержит устройство позиционирования и вышеописанный медицинский катетер. Устройство позиционирования содержит блок обработки положения и блок отображения, при этом блок обработки положения соединен с возможностью обмена данными как с первым, так и со вторым магнитными датчиками. Блок обработки положения выполнен с возможностью получения информации о положении первого и второго магнитных датчиков и получения информации о положении секции головки на основе информации о положении первого и второго магнитных датчиков. Блок отображения соединен с возможностью обмена данными с блоком обработки положения и выполнен с возможностью приема и отображения информации о положении секции головки. Изобретение обеспечивает более точный контроль над медицинским катетером за счет точного определения местоположения секции головки медицинского катетера с использованием магнитных датчиков и отображения его положения, что позволяет более точно провести интервенционную процедуру с использованием катетера; кроме того, можно избежать радиационного воздействия как на хирурга, так и на пациента, что повышает хирургическую безопасность. 2 н. и 11 з.п. ф-лы, 16 ил.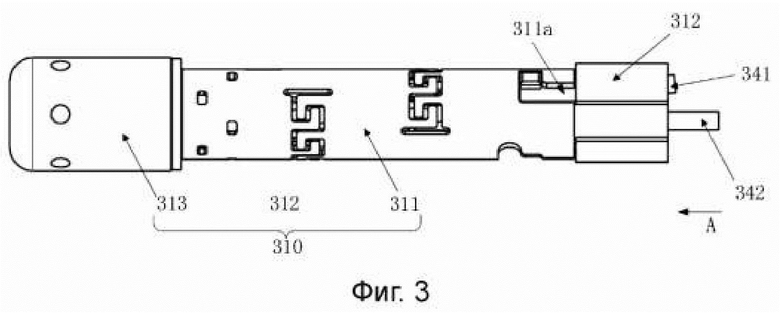
1. Медицинский катетер, содержащий корпус катетера, первый магнитный датчик и второй магнитный датчик, при этом корпус катетера содержит последовательно соединенные вдоль его оси секцию головки, регулируемую по изгибу секцию и прямую секцию, при этом первый и второй магнитные датчики расположены на секции головки;
в котором первый и второй магнитные датчики ориентированы под углом друг к другу;
причем секция головки содержит конструктивный элемент, имеющий проксимальный конец, соединенный с регулируемой по изгибу секцией, где первый магнитный датчик расположен на конструктивном элементе;
конструктивный элемент образует первый канал, ось которого расположена под углом к оси конструктивного элемента;
первый магнитный датчик по меньшей мере частично расположен в первом канале;
конструктивный элемент выполнен ферромагнитным, при этом второй магнитный датчик содержит катушку индуктивности, витки которой по меньшей мере частично намотаны на внешней окружной поверхности конструктивного элемента, или
конструктивный элемент содержит неферромагнитный корпус и трубку с ферромагнитным сердечником, расположенную над корпусом, при этом первый канал образован в корпусе, а второй магнитный датчик представляет собой катушку индуктивности, витки которой по меньшей мере частично намотаны на внешней окружной поверхности конструктивного элемента.
2. Медицинский катетер по п. 1, в котором угол ориентации между первым и вторым магнитными датчиками, составляет от 5 до 175°.
3. Медицинский катетер по п. 1, в котором угол между осью первого канала и осью конструктивного элемента составляет от 5 до 10°.
4. Медицинский катетер по п. 1, в котором конструктивный элемент образует один упомянутый первый канал и три вторых канала, которые разнесены по окружности друг от друга, при этом по меньшей мере один из вторых каналов расположен под углом к первому каналу, а в радиальном сечении конструктивного элемента каждый из вторых каналов имеет по меньшей мере частично открытый контур.
5. Медицинский катетер по п. 4, в котором вторые каналы выполнены для прохождения через них различных выводов или протекания через них среды,
при этом по окружности конструктивного элемента один из трех вторых каналов противоположен первому каналу, а остальные два вторых канала расположены на противоположных сторонах первого канала, и при этом в радиальном сечении конструктивного элемента контур каждого из вторых каналов содержит дуговой край и два прямых края, проходящих от соответствующих концов дугового края.
6. Медицинский катетер по п. 5, в котором прямые края второго канала, который противоположен первому каналу, параллельны линии, соединяющей центр первого канала и центр дугового края второго канала, противоположного первому каналу, при этом прямые края одного из двух оставшихся вторых каналов перпендикулярны этой линии, и прямые края другого канала наклонены относительно упомянутой линии, а расстояние от центра дугового края другого канала до центра дугового края второго канала, противоположного первому каналу, меньше расстояния от центра дугового края другого канала до центра первого канала.
7. Медицинский катетер по п. 1, в котором секция головки дополнительно содержит эластомер, снабженный тензодатчиком, при этом тензодатчик выполнен с возможностью определения величины внешней силы, действующей на секцию головки при деформировании.
8. Медицинский катетер по п. 1, дополнительно содержащий третий магнитный датчик и четвертый магнитный датчик, которые расположены внутри прямой секции на ее дистальном конце и ориентированы под углом друг к другу.
9. Медицинский катетер по п. 8, в котором все: первый, второй, третий и четвертый магнитные датчики являются датчиками с пятью степенями свободы.
10. Трехмерная система магнитного позиционирования, содержащая устройство позиционирования и медицинский катетер по любому из пп. 1-9,
устройство позиционирования содержит блок обработки положения и блок отображения, при этом блок обработки положения соединен с возможностью обмена данными как с первым, так и со вторым магнитными датчиками,
блок обработки положения выполнен с возможностью получения информации о положении первого и второго магнитных датчиков и получения информации о положении секции головки на основе информации о положении первого и второго магнитных датчиков,
блок отображения соединен с возможностью обмена данными с блоком обработки положения и выполнен с возможностью приема и отображения информации о положении секции головки.
11. Трехмерная система магнитного позиционирования по п. 10, в которой медицинский катетер дополнительно содержит третий и четвертый магнитные датчики, третий и четвертый магнитные датчики расположены в прямой секции на ее дистальном конце и оба соединены с возможностью обмена данными с блоком обработки положения,
при этом блок обработки положения дополнительно выполнен с возможностью получения информации о положении третьего и четвертого магнитных датчиков и получения информации о положении дистального конца прямой секции на основе информации о положении третьего и четвертого магнитных датчиков, а также информации о положении регулируемой по изгибу секции на основе информации о положении как секции головки, так и дистального конца прямой секции, и
блок отображения выполнен с возможностью приема и отображения информации о положении регулируемой по изгибу секции.
12. Трехмерная система магнитного позиционирования по п. 11, в которой блок обработки положения выполнен с возможностью визуализации информации о положении секции головки и информации о положении регулируемой по изгибу секции, при этом блок отображения выполнен с возможностью приема и отображения визуализированной информации о положении, и/или блок обработки положения дополнительно выполнен с возможностью определения ожидаемого направления изгиба регулируемой по изгибу секции на основе информации о положении секции головки.
13. Трехмерная магнитная система позиционирования по п. 10, в которой медицинский катетер дополнительно содержит тензодатчик, который расположен на секции головки и выполнен с возможностью определения величины внешней силы, действующей на секцию головки и вызывающей ее деформирование, и соединен с возможностью обмена данными с блоком обработки положения,
при этом блок обработки положения дополнительно выполнен с возможностью получения вектора силы на секции головки на основе информации о положении секции головки и величины внешней силы на секции головки, и
блок отображения выполнен с возможностью приема и отображения вектора силы.
| CN 111001075 A, 14.04.2020 | |||
| CN 111743629 A, 09.10.2020 | |||
| EP 776176 B1, 29.12.1999 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| ОДНОНАПРАВЛЕННАЯ РУКОЯТКА УПРАВЛЕНИЯ КАТЕТЕРОМ С КОНТРОЛЕМ НАТЯЖЕНИЯ | 2013 |
|
RU2676841C2 |
| КАТЕТЕР С ИЗМЕНЯЕМОЙ КРИВИЗНОЙ | 2013 |
|
RU2630621C2 |
| ИЗГИБАЕМЫЙ КАТЕТЕР С СОЕДИНЕННОЙ ЦЕНТРАЛЬНОЙ СТОЙКОЙ | 2009 |
|
RU2563384C1 |

