Изобретение относится к устройствам железнодорожной автоматики и телемеханики, обеспечивающим безопасность движения в местах пересечения железнодорожного и автомобильного транспорта, и предназначено для определения скорости и ускорения поезда.
Вопрос обеспечения безопасности движения транспорта на участках пересечения автомобильных и железных дорог в одном уровне является актуальным. Значительное время простоя автотранспорта перед закрытым переездом приводит к возникновению аварийных ситуаций на переезде.
В используемых в настоящее время системах переездной автоматики время извещения о приближении поезда рассчитывается исходя из максимальной установленной скорости движения поезда на участке. Однако для обеспечения минимального времени нахождения железнодорожного переезда в закрытом состоянии необходим непрерывный контроль фактического местоположения поезда на участке приближения и определение действующих значений скорости и ускорения подвижного состава.
Известен способ управления закрытием железнодорожного переезда (патент RU 2610903 С1, МПК B61L 29/00, МПК B61L 29/18, опубл. 17.02.2017 Бюл. №5), в котором положение и направление подвижного состава определяются с помощью сравнения изменений первичных параметров аналоговой рельсовой линии при движении поезда по контролируемым участкам. На основании выполненного сравнения определяется величина координаты закрытия переезда и осуществляется активация автоматических средств переездной сигнализации.
Недостатком известного способа является влияние изменения сопротивления верхнего строения пути на параметры рельсовой линии.
Так же известно устройство управления автоматической переездной сигнализацией (RU 2651379 С2, B61L 29/00, опубл. 16.10.2017 Бюл. №29, 19.04.2018 Бюл. №11), содержащее источник питания, первый и второй датчики тока, устройства согласования аппаратуры питающего и релейного концов, вычислительно-логический блок с уравнением координаты поезда с заранее определенными коэффициентами, блок хранения коэффициентов уравнения, блок корректировки коэффициентов, блок управления автоматической переездной сигнализацией, приемник рельсовой цепи, блок сравнения с двумя выходами и двумя входами, один из которых подсоединен к выходу вычислительно-логического блока, другой к выходу второго датчика тока. Первый выход блока сравнения через блок корректировки коэффициентов уравнения подсоединен к блоку хранения коэффициентов, выход которого подсоединен к третьему входу вычислительно-логического блока. Ко второму выходу блока сравнения подключен блок управления автоматической переездной сигнализацией. Второй датчик тока подключен между блоком согласования аппаратуры питания релейного конца и приемником рельсовой цепи. Управление автоматической переездной сигнализацией осуществляется посредством верификации определенной уравнением вычисленной координаты поезда в текущий момент времени с координатой начала участка приближения фиксированной длины. При этом координата поезда определяется по величине напряжения и тока на питающем конце рельсовой цепи участка приближения и корректируется до достижения фактического значения.
Недостатком известного устройства управления автоматической переездной сигнализацией является невысокая надежность работы рельсовой цепи, а также существует мешающее влияние тягового тока и атмосферных перенапряжений на напольное оборудование. К недостатку также можно отнести невозможность использования подобного технического решения на малодеятельных участках и на путях необщего пользования промышленных предприятий, где отсутствуют электрические рельсовые цепи.
Известен способ управления переездной сигнализацией (RU 2547909 С1, МПК B61L 29/24, опубл. 10.04.2015 Бюл. №10), включающий радиолокационное обнаружение движущихся объектов и использование географических данных о расположении железнодорожного пути. По данным траекторий подвижных объектов, полученных от радиолокационных станций, выделяют объект, траектория движения которого совпадает с географическими данными участков приближения или удаления, отождествляют этот объект с железнодорожной единицей. Затем по данным координат поезда с учетом скорости их изменения программными средствами определяют время прибытия на переезд и момент освобождения поездом переезда, и с необходимыми зависимостями выдают команды на управление средствами ограждения и сигнализации.
Недостатком известного способа управления переездной сигнализацией является необходимость оборудования радиолокационных станций вблизи контролируемых участков железнодорожного переезда. Кроме того, наличие пассивных помех в полезном радиосигнале, осложняет точное определение параметров движения поезда.
Наиболее близким к предлагаемому техническому решению является система контроля местоположения поезда (RU 2675041 С1, МПК B61L 25/02, опубл. 14.12.2018), выбранная в качестве прототипа. Система содержит центр управления движением поездов, волоконно-оптический кабель с герметичной заглушкой, проложенный вдоль пути, и бортовую часть, включающую бортовой приемник спутниковой навигационной системы, блок привязки географических координат к трассе железнодорожной линии, контроллер и локомотивную радиостанцию. Причем центр управления включает информационно-управляющий сервер, устройство электрической централизации, стационарный радиоприемопередатчик, сенсорное устройство слежения за движением поездов по перегону, блок данных о местоположении головного и хвостового вагонов поезда, последовательно соединенные модули накопления рефлектограмм, преобразования Фурье, фильтрации шумов, построения траекторий головы и хвоста поезда, определения интервала времени нахождения поезда в рассматриваемой координате пути, накопления данных о количестве осей и вагонов, преследующих границы участков пути, определения состояния свободности/занятости участков пути, а также два модуля фильтра Гаусса и два модуля вычисления количества локальных максимумов. Достигается повышение точности определения местоположения головного и хвостового вагонов поезда.
Однако известная система контроля местоположения поезда имеет следующие недостатки:
- необходимость установки бортового оборудования на локомотив, а именно: бортового приемника спутниковой навигационной системы и стационарного радиоприемопередатчика;
- при обнаружении местоположения поезда на пути с помощью волоконно-оптического кабеля, подключенного к сенсорному устройству, скорость и ускорение поезда не контролируется;
- отсутствует аппаратное резервирование сенсорного устройства слежения за движением поезда по перегону, а в случае неисправности волоконно-оптического кабеля местоположение поезда локационным методом не установить.
Технической задачей заявленного изобретения является создание устройства управления системой автоматической переездной сигнализации, обеспечивающего устранение недостатков прототипа.
Технический результат - повышение точности определения параметров движения поезда, а именно скорости и ускорения, при приближении к месту пересечения с автомобильной дорогой и снижение времени закрытого состояния переезда.
Для решения технической задачи и достижения технического результата в устройстве управления системой автоматической переездной сигнализации, содержащем распределенный волоконно-оптический датчик, расположенный на участке приближения с одной стороны железнодорожного пути, согласно изобретению, в устройство включен дополнительный распределенный волоконно-оптический датчик, расположенный на участке приближения с другой стороны железнодорожного пути, при этом выходы волоконно-оптических датчиков подключены к входу модуля опроса, выход которого соединен с входом блока контроля параметров движения поезда и управления переездной сигнализацией, выход которого подключен к входу устройства сопряжения, выход которого соединен с устройствами автоматической переездной сигнализации.
Сущность изобретения поясняется чертежом.
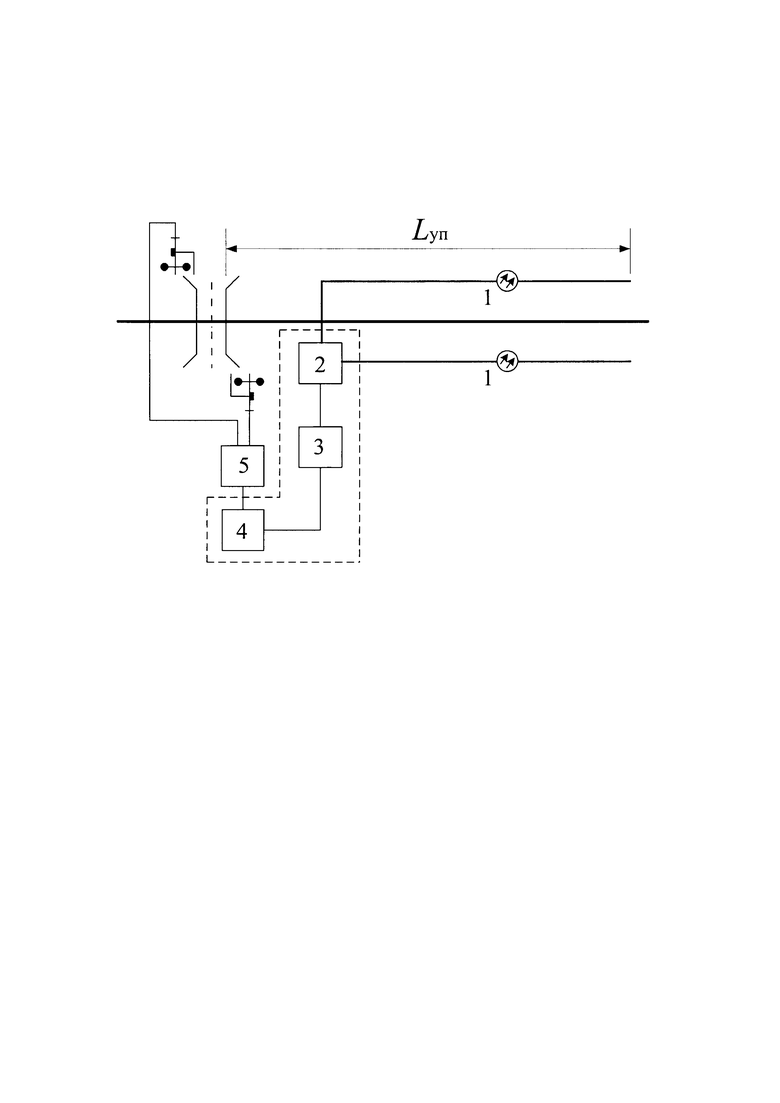
На чертеже представлена схема устройства управления системой автоматической переездной сигнализации.
Устройство управления системой автоматической переездной сигнализации содержит два распределенных волоконно-оптических датчика 1, каждый из которых выполнен в виде заключенного в оболочку одномодового оптического световода. Волоконно-оптические датчики 1 расположены в призме земляного полотна, вдоль контролируемых участков приближения к железнодорожному переезду Lyп., причем для возможности организации двух измерительных трактов один датчик расположен с одной стороны железнодорожного пути, а второй датчик - с другой стороны железнодорожного пути. Выходы распределенных волоконно-оптических датчиков 1 через модуль опроса 2 соединены с входом блока контроля параметров движения поезда и управления переездной сигнализацией 3. Модуль опроса 2 содержит источник последовательных коротких импульсов и приемник рассеянного сигнала (на фигуре не показаны) и предназначен для приема информации от распределенного волоконно-оптического датчика 1. Устройства автоматической переездной сигнализации 5, в том числе переездные светофоры, шлагбаумы, устройства заграждения переезда (УЗП) подключены к выходу устройства сопряжения 4, вход которого соединен с выходом блока контроля параметров движения поезда и управления переездной сигнализацией 3. Устройство сопряжения 4 предназначено для управления исполнительными реле устройств переездной сигнализации 5 по командам, формируемым блоком контроля параметров движения поезда и управления переездной сигнализацией 3, и передачи информации о состоянии объектов управления.
Предлагаемое устройство работает следующим образом.
В основе лежит принцип непрерывного определения скорости и ускорения движения поезда на участке приближения к переезду, благодаря чему достигается минимальное возможное (по условиям безопасности) значение времени закрытого состояния переезда. При этом применяются методы регистрации и обработки оптического интерференционного рассеянного сигнала, вызванного вибрационным возмущением чувствительного световода распределенного волоконно-оптического датчика 1.
При приближении поезда к участку приближения переезда воздействия динамических нагрузок от подвижного состава на элементы верхнего строения пути локально влияют на изменение показателя преломления распределенного волоконно-оптического датчика 1.
Принцип работы распределенного волоконно-оптического датчика 1 основан на явлении обратного рассеяния когерентного лазерного излучения в световоде. При этом на выходе распределенного волоконно-оптического датчика 1 образуется интерференционная картина: зависимость интенсивности рассеянного сигнала от пространственной координаты распределенного датчика.
Флуктуации показателя преломления вызывают локальное изменение интерференционной картины.
В модуле опроса 2 блоком приема и обработки обратно рассеянного сигнала за заданный промежуток времени Tj и шагом измерений tj фиксируются т интерференционных картин в каждом измерительном тракте.
Затем для каждой пространственной координаты kn определяется среднеквадратическое отклонение уровня принимаемого сигнала от среднего значения, измеренного за промежуток времени Tj:
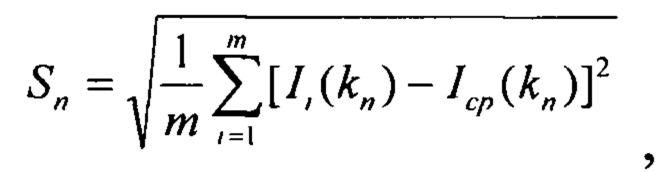
где:
Sn - оценка стандартного отклонения;
m - число измерений за заданный промежуток времени Tj;
Ii(kn) - уровень принимаемого сигнала n-ой пространственной координаты для i-го измерения;
Iср(kn) - среднее значение уровня принимаемого сигнала n-ой пространственной координаты.
По заданным максимальным пороговым значениям отклонения Sn определяются пространственные координаты воздействия. За известный промежуток времени Δt по приращениям пространственных координат воздействия Δk определяется скорость их изменения. Полученное значение скорости сравнивается со значением, вычисленным во втором измерительном тракте, и поступает в блок контроля параметров движения поезда и управления переездной сигнализацией 3.
Блок контроля параметров движения поезда и управления переездной сигнализацией 3 сохраняет и анализирует информацию заданного числа фиксируемых подряд значений, а затем формирует данные о параметрах приближающегося к переезду подвижного состава в режиме реального времени. На основе полученных данных вычисляется время подачи извещения на переезд и формируются команды управления устройствами автоматической переездной сигнализации 5. Управление устройствами автоматической переездной сигнализации 5 осуществляется с помощью устройства сопряжения 4. Устройства сопряжения 4 так же обеспечивает формирование и передачу информации о состоянии устройств переезда в блок контроля параметров движения поезда и управления переездной сигнализацией 3.
Преимуществом заявляемого технического решения является то, что повышение точности определения параметров движения поезда достигается непрерывным контролем местоположения и вычислением скорости подвижного состава на всем участке приближения к переезду с помощью расположенных с двух сторон железнодорожного пути распределенных волоконно-оптических датчиков. Согласно предложенному алгоритму вычисления времени подачи извещения на переезд обеспечивается минимальное возможное (по условиям безопасности) значение времени закрытого состояния переезда.
Устройство может применяться как на существующих, так и на вновь сооружаемых перегонных и станционных переездах, находящихся на железнодорожных путях общего и необщего пользования. При этом предлагаемое устройство не требует установки дополнительного оборудования, как напольного, так и бортового.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2013 |
|
RU2544285C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2013 |
|
RU2547909C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2021 |
|
RU2761960C1 |
| Устройство управления автоматической переездной сигнализацией | 2016 |
|
RU2651379C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2018 |
|
RU2681451C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2011 |
|
RU2468949C1 |
| СИСТЕМА ЗАЩИТЫ ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕЕЗДОВ | 2013 |
|
RU2565159C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2021 |
|
RU2771185C1 |
| Автоматическое предупредительно-оповестительное устройство переездной железнодорожной сигнализации | 2018 |
|
RU2681792C1 |
| Способ контроля проезда транспорта через железнодорожный переезд | 2021 |
|
RU2774127C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики. Устройство управления системой автоматической переездной сигнализации содержит два распределенных волоконно-оптических датчика. Датчики расположены на участке приближения с двух сторон железнодорожного пути. Выходы волоконно-оптических датчиков подключены к входу модуля опроса. Выход модуля опроса соединен с входом блока контроля параметров движения поезда и управления переездной сигнализацией. Выход блока контроля параметров подключен к входу устройства сопряжения. Выход устройства сопряжения соединен с устройствами автоматической переездной сигнализации. Достигается повышение точности определения параметров движения поезда при приближении к месту пересечения с автомобильной дорогой и снижение времени закрытого состояния переезда. 1 ил.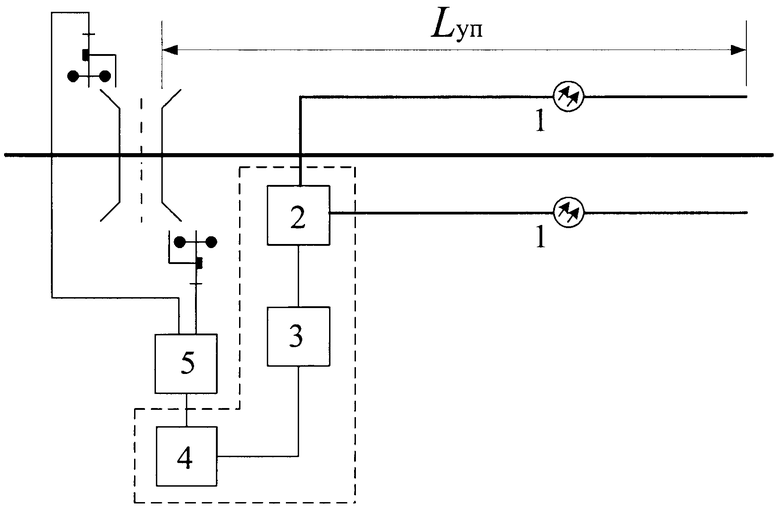
Устройство управления системой автоматической переездной сигнализации, содержащее распределенный волоконно-оптический датчик, расположенный на участке приближения с одной стороны железнодорожного пути, отличающееся тем, что содержит дополнительный распределенный волоконно-оптический датчик, расположенный на участке приближения с другой стороны железнодорожного пути, при этом выходы волоконно-оптических датчиков подключены к входу модуля опроса, выход которого соединен с входом блока контроля параметров движения поезда и управления переездной сигнализацией, выход которого подключен к входу устройства сопряжения, выход которого соединен с устройствами автоматической переездной сигнализации.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2011 |
|
RU2468949C1 |
| Система контроля местоположения поезда | 2018 |
|
RU2675041C1 |
| Устройство для счета осей | 1978 |
|
SU797939A1 |
| Устройство управления автоматической переездной сигнализацией | 2016 |
|
RU2651379C2 |
| WO 2018019878 A1, 01.02.2018 | |||
| US 5330136 A, 19.07.1994. | |||

