Изобретение относится к области транспортного машиностроения, в частности к рулевому управлению колесными транспортными средствами.
Известен способ поворота колесного транспортного средства посредством рулевого привода, включающего трапецию с поворотными рычагами и колеса, за счет принудительного изменения величины скорости вращения задающего колеса, которое начинает изменять свое положение, изменяя угол поворота поворотного рычага, кинематически связанного через трапецию с другим поворотным рычагом, который в свою очередь отклоняется в другую сторону, изменяет положение второго колеса. Поворот осуществляют за счет увеличения скорости вращения задающего внешнего колеса относительно заданной при движении траектории поворота и/или за счет уменьшения скорости вращения задающего внутреннего колеса относительно заданной при движении траектории поворота. При этом скорости вращения колес задают с учетом геометрических размеров элементов рулевого привода и управляемых колес, а также производной величины угла между поворотным рычагом и горизонталью каждого из колес (RU 2476344, RU 2562937, B62D/00; D60K 17/30; В62В 15/00; 28.06.11).
Недостатком такого способа управления является то, что при расчете требуемых скоростей вращения колес не учитывается дополнительное изменение пути каждого из колес при движении по неровной поверхности, и, как следствие, приводит к ошибке управления.
Техническим результатом является создание более эффективного управления поворотом колесного транспортного средства за счет использования разности скоростей вращения управляемых колес, отличающийся тем, что для расчета требуемых скоростей вращения колес учитывается дополнительное изменение пути каждого из колес при движении по неровной поверхности.
Это достигается тем, что в способе поворота колесного транспортного средства посредством рулевого привода, включающего трапецию с поворотными рычагами и колеса, за счет принудительного изменения величины скорости вращения задающего колеса, которое начинает изменять свое положение, изменяя угол поворота поворотного рычага, кинематически связанного через трапецию с другим поворотным рычагом, который в свою очередь отклоняется в другую сторону, изменяет положение второго колеса, при этом поворот осуществляют за счет увеличения скорости вращения задающего внешнего колеса относительно заданной при движении траектории поворота и/или за счет уменьшения скорости вращения задающего внутреннего колеса относительно заданной при движении траектории поворота, особенность заключается в том, что учитывается влияние неровностей поверхности, по которой движется транспортное средство, путем вычисления косинуса угла между поворотным рычагом и горизонталью каждого из колес, что в свою очередь позволяет определить длину проекции поворотного рычага на плоскость рамы транспортного средства как произведение длины поворотного рычага на косинус угла между поворотным рычагом каждого из колес и плоскостью рамы, что в свою очередь позволяет определить дополнительное изменение пути каждого из колес при движении по неровной поверхности и, как следствие, определить требуемую скорость каждого колеса.
Способ осуществляется следующим образом.
Пусть, колесное транспортное средство имеет независимую подвеску колес, движется под заданным углом поворота и на пути одного из его рулевых колес встречается неровность. Чтобы компенсировать изменение пути этого колеса, вызванное изменением длины проекции поворотного рычага на плоскость рамы транспортного средства, и сохранить прежнее направление движения транспортного средства, скорость данного колеса нужно изменить, учитывая при ее расчете не общую длину поворотного рычага  , а длину его проекции на плоскость рамы. Длина проекции вычисляется как произведение длины поворотного рычага на косинус угла θi между поворотным рычагом и плоскостью рамы каждого из i колес.
, а длину его проекции на плоскость рамы. Длина проекции вычисляется как произведение длины поворотного рычага на косинус угла θi между поворотным рычагом и плоскостью рамы каждого из i колес.
Например, для 4-колесного транспортного средства, включающего 2 оси, на одной из которых расположены управляемые колеса, в случае, если радиус управляемых колес одинаковый и равен r, то с целью установки требуемых углов поворота α1 и α2 управляемых колес скорости вращения V1 и V2 управляемых колес рассчитываются следующим образом:
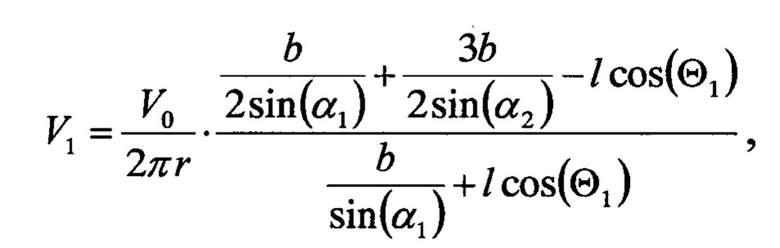
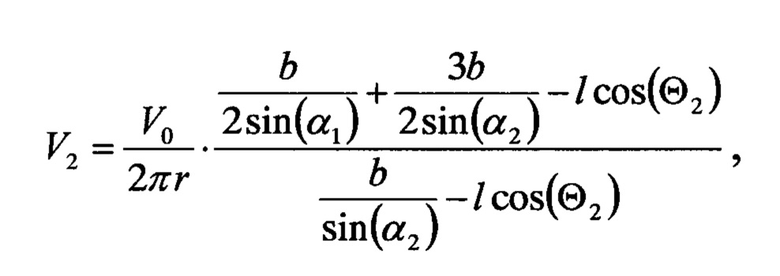
где V0 - скорость движения транспортного средства, b - расстояние между осями транспортного средства.
Для заявленного способа в том виде, как он охарактеризован в изложенной формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов. Следовательно, заявленное изобретение соответствует условию «промышленная применимость».
Таким образом, можно управлять поворотом колес транспортного средства по выбранному закону, обеспечивая необходимые условия для поворота с учетом неровностей поверхности движения колесного транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВОРОТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2562937C1 |
| СПОСОБ ПОВОРОТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2476344C1 |
| Передний управляемый мост с изменяемыми углами установки колес транспортного средства | 1980 |
|
SU927614A1 |
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2000 |
|
RU2186703C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНЫЙ МИННЫЙ РАЗГРАДИТЕЛЬ | 2012 |
|
RU2511269C1 |
| Рулевая трапеция колесного транспортного средства с изменяемой колеей | 1985 |
|
SU1303477A1 |
| РУЛЕВАЯ ТРАПЕЦИЯ С ИЗМЕНЯЕМЫМИ УГЛАМИ ПОВОРОТА УПРАВЛЯЕМЫХ КОЛЕС | 2008 |
|
RU2375230C1 |
| КОЛЕСНО-ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2331542C1 |
| Подвеска спортивного автомобиля с наклоном колес и кузова в сторону поворота | 2019 |
|
RU2723202C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794243C1 |
Изобретение относится к области транспортного машиностроения. Способ поворота колесного транспортного средства посредством рулевого привода, включающего трапецию с поворотными рычагами и колеса, заключается в том, что поворот осуществляют за счет принудительного изменения величины скорости вращения задающего колеса, которое начинает изменять свое положение. Изменяют угол поворота поворотного рычага, кинематически связанного через трапецию с другим поворотным рычагом, который в свою очередь отклоняется в другую сторону, изменяя положение второго колеса. Скорости вращения колес задают с учетом косинуса величины угла между поворотным рычагом и горизонталью каждого из колес. Достигается улучшение управляемости транспортного средства.
Способ поворота колесного транспортного средства посредством рулевого привода, включающего трапецию с поворотными рычагами и колеса, где поворот осуществляют за счет принудительного изменения величины скорости вращения задающего колеса, которое начинает изменять свое положение, изменяя угол поворота поворотного рычага, кинематически связанного через трапецию с другим поворотным рычагом, который в свою очередь отклоняется в другую сторону, изменяя положение второго колеса, отличающийся тем, что скорости вращения колес задают с учетом косинуса величины угла между поворотным рычагом и горизонталью каждого из колес.
| СПОСОБ ПОВОРОТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2476344C1 |
| СПОСОБ ПОВОРОТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2562937C1 |
| ПРЯМОТОЧНАЯ СТЕКЛОВАРЕННАЯ ПЕЧЬ | 1997 |
|
RU2133232C1 |
| Раскряжевочная установка | 1988 |
|
SU1669716A1 |

