Изобретение относится к области транспортного машиностроения, в частности к рулевому управлению колесными транспортными средствами.
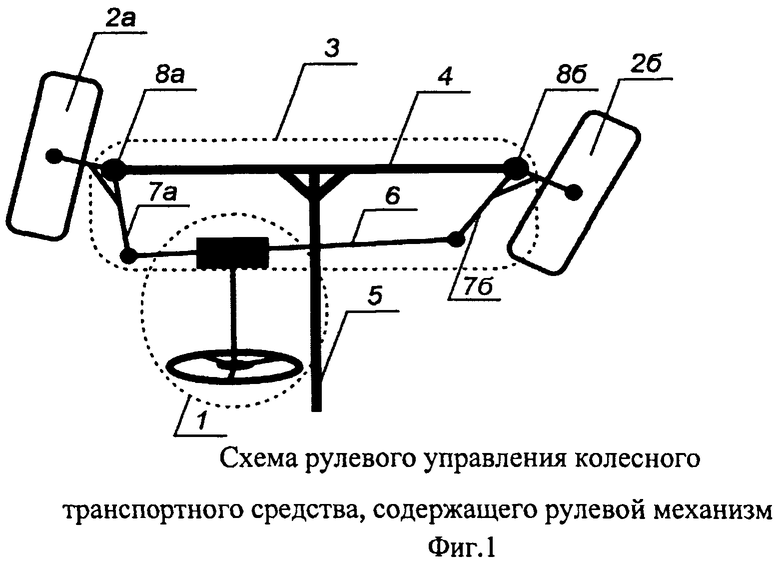
Известен способ рулевого управления колесного транспортного средства за счет кинематической связи управляемых колес и рулевого механизма посредством рулевого привода, схема которого приведена на фиг.1. Рулевым механизмом 1 называют механизм, который позволяет осуществить поворот управляемых колес 2а и 26 с необходимым передаточным числом, а рулевым приводом 3 - систему тяг и рычагов, которые в совокупности с рулевым механизмом осуществляют поворот колесного транспортного средства. Наибольшее распространение получил рулевой привод в виде трапеции. Одним основанием трапеции служит средняя часть передней оси (балки) 4, которая крепится к раме 5, другим основанием служит поперечная тяга 6, боковыми сторонами - рычаги 7а и 7б, укрепленные в поворотных цапфах колес 8а и 8б (См. Лысов М.И. Рулевые управления автомобилей / М.И.Лысов. - М.: Машиностроение, 1972., стр.5).
Недостатком такого способа управления является то, что поворот транспортного средства осуществляется посредством сложной конструкции рулевого управления, требующей обеспечения кинематической связи между рулем и рулевым приводом посредством рулевого механизма.
Целью предлагаемого изобретения является создание более эффективного управления поворотом колесного транспортного средства за счет использования разности скоростей вращения управляемых колес для непосредственного изменения положения управляемых колес, что приводит к повороту транспортного средства без использования рулевого механизма.
Это достигается тем, что в способе поворота колесного транспортного средства посредством рулевого привода, включающего трапецию с поворотными рычагами и колеса, особенность заключается в том, что поворот осуществляют за счет принудительного изменения величины скорости вращения задающего колеса, которое начинает изменять свое положение, изменяя угол поворота поворотного рычага, кинематически связанного через трапецию с другим поворотным рычагом, который в свою очередь отклоняется в другую сторону, изменяя положение второго колеса, при этом поворот осуществляют за счет увеличения скорости вращения задающего внешнего колеса относительно заданной при движении траектории поворота и/или за счет уменьшения скорости вращения задающего внутреннего колеса относительно заданной при движении траектории поворота и также скорости вращения колес задают с учетом геометрических размеров элементов рулевого привода и управляемых колес.
Перечень фигур чертежей.
На фиг.1 изображена схема рулевого управления колесного транспортного средства, содержащего рулевой механизм.
На фиг.2 изображена схема рулевого управления колесного транспортного средства, основанного на изменении скоростей вращения управляемых колес.
На фиг.2 изображено два управляемых колеса 1 и 2, поворотные рычаги 3 и 4, рулевая трапеция 5, приводы 6а и 6б, система управления поворотом колес 7.
Способ осуществляется следующим образом.
В случае, если требуется, чтобы транспортное средство передвигалось прямолинейно, управляемым колесам 1 и 2 задают одинаковые скорости вращения V1=V2, выраженные в обороты/сек.
В случае если требуется, чтобы колесное транспортное средство поворачивало, соответствующему управляемому колесу, например управляемому колесу 1, задают скорость вращения V1 большую, чем у остальных колес, вследствие чего происходит забегание этого управляемого колеса 1 вперед. Таким образом будет изменяться положение соответствующего поворотного рычага 3. При этом чем длиннее поворотный рычаг, тем медленнее будет изменяться его положение. Так как поворотный рычаг 3 управляемого колеса 1 кинематически связан с поворотным рычагом 4 управляемого колеса 2 посредством рулевой трапеции 5, то в случае забегания управляемого колеса 1 вперед управляемое колесо 2 будет стремиться отклониться назад. При этом для исключения юза и, как следствие, повышенного износа шин необходимо оптимизировать скорость вращения V2 управляемого колеса 2.
Аналогичный результат можно получить, если управляемому колесу 2 задать скорость вращения V2 меньшую, чем у остальных колес, вследствие чего происходит отклонение этого управляемого колеса 2 назад. Таким образом будет изменяться положение соответствующего поворотного рычага 4. Так как поворотный рычаг 4 управляемого колеса 2 кинематически связан с поворотным рычагом 3 управляемого колеса 1 посредством рулевой трапеции 5, то в случае отклонения управляемого колеса 2 назад управляемое колесо 1 будет стремиться отклониться вперед. При этом для исключения юза и, как следствие, повышенного износа шин необходимо оптимизировать скорость вращения V1 управляемого колеса 1.
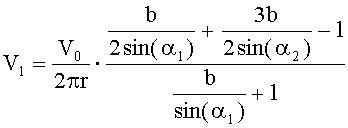
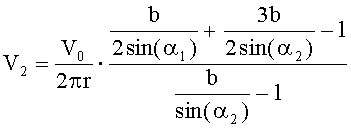
Для установки требуемых углов поворота α1 и α2 управляемых колес 1 и 2 соответственно необходимо задавать определенные скорости вращения V1 и V2 управляемых колес 1 и 2 соответственно, величина которых также зависит от скорости движения транспортного средства V0, геометрических размеров его конструктивных элементов: радиуса управляемых колес 1, 2, элементов рулевого привода 3, 4, 5.
Например, для 4-колесного транспортного средства, включающего 2 оси, на одной из которых расположены управляемые колеса, в случае, если радиус управляемых колес одинаковый и равен r, то с целью установки требуемых углов поворота α1 и α2 управляемых колес скорости вращения V1 и V2 управляемых колес рассчитываются следующим образом:
 ,
,
 ,
,
где V0 - скорость движения транспортного средства, l - длина поворотных рычагов, b - расстояние между осями.
Для того чтобы определять текущее положение управляемых колес и момент достижения требуемых углов поворота α1 и α2 управляемых колес 1 и 2 и в соответствии с данной информацией задавать скорости вращения V1 и V2 управляемых колес 1 и 2, используют один или несколько датчиков угла поворота управляемых колес (на фиг.2 не отображено), которые располагаются в соответствии с конструктивными особенностями транспортного средства.
Скорости вращения V1 и V2 управляемых колес 1 и 2 задают с помощью приводов 6а и 6б. В качестве приводов могут выступать электродвигатели либо другие силовые установки, обеспечивающие требуемые скорости вращения V1 и V2 управляемых колес 1 и 2.
Управление скоростями вращения V1 и V2 управляемых колес 1 и 2 осуществляют через систему управления поворотом колес 7 на основании данных о геометрических размерах элементов рулевого привода, требуемых углах поворота α1 и α2 управляемых колес 1 и 2, текущих углах поворота управляемых колес 1 и 2, требуемой скорости движения транспортного средства V0, радиуса управляемых колес 1 и 2.
При увеличении количества осей колесного транспортного средства количество связанных посредством рулевой трапеции пар управляемых колес может увеличиваться. В случае если колесное транспортное средство содержит 2 оси, для поворота можно использовать как одну, так и две пары управляющих колес. В предельном случае количество связанных посредством рулевой трапеции пар управляемых колес может совпадать с количеством осей колесного транспортного средства.
Для заявленного способа в том виде, как он охарактеризован в независимом пункте изложенной формулы изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов. Следовательно, заявленное изобретение соответствует условию «промышленная применимость».
Таким образом, можно управлять поворотом колес транспортного средства по выбранному закону, обеспечивая необходимые условия для поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поворота колесного транспортного средства | 2018 |
|
RU2738361C2 |
| СПОСОБ ПОВОРОТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2562937C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОЧЛЕНЁННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2601077C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| ПЕРСОНАЛЬНОЕ САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2006 |
|
RU2309716C2 |
| РУЛЕВОЕ УПРАВЛЕНИЕ МНОГООСНОГО ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1991 |
|
RU2045434C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| РУЛЕВАЯ ТРАПЕЦИЯ С ИЗМЕНЯЕМЫМИ УГЛАМИ ПОВОРОТА УПРАВЛЯЕМЫХ КОЛЕС | 2008 |
|
RU2375230C1 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794243C1 |
Изобретение относится к области транспортного машиностроения. Способ поворота колесного транспортного средства посредством рулевого привода включает трапецию с поворотными рычагами и колеса. Поворот осуществляют за счет принудительного изменения величины скорости вращения задающего колеса, которое начинает изменять свое положение, изменяя угол поворота поворотного рычага. Рычаг кинематически связан через трапецию с другим поворотным рычагом, который в свою очередь отклоняется в другую сторону, изменяя положение второго колеса. Поворот осуществляют за счет увеличения скорости вращения задающего внешнего колеса относительно заданной при движении траектории поворота и/или за счет уменьшения скорости вращения задающего внутреннего колеса относительно заданной при движении траектории поворота. Достигается повышение эффективности управления транспортным средством. 1 з.п. ф-лы, 2 ил.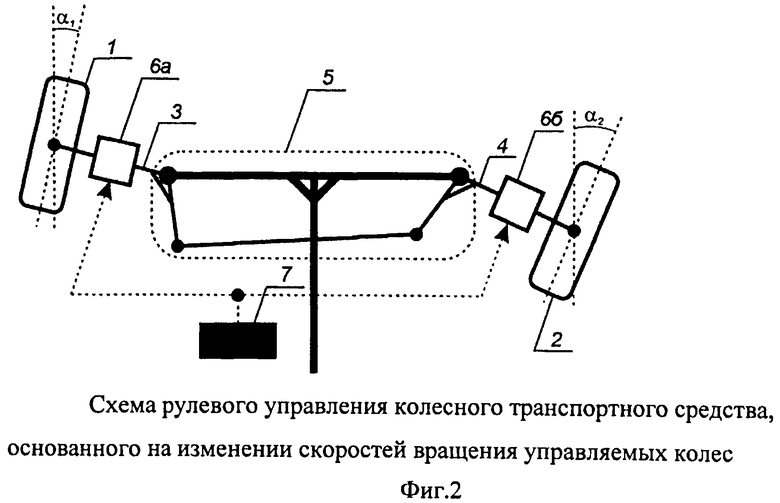
1. Способ поворота колесного транспортного средства посредством рулевого привода, включающего трапецию с поворотными рычагами и колеса, отличающийся тем, что поворот осуществляют за счет принудительного изменения величины скорости вращения задающего колеса, которое начинает изменять свое положение, изменяя угол поворота поворотного рычага, кинематически связанного через трапецию с другим поворотным рычагом, который, в свою очередь, отклоняется в другую сторону, изменяя положение второго колеса, при этом поворот осуществляют за счет увеличения скорости вращения задающего внешнего колеса относительно заданной при движении траектории поворота и/или за счет уменьшения скорости вращения задающего внутреннего колеса относительно заданной при движении траектории поворота.
2. Способ по п.1, отличающийся тем, что скорости вращения колес задают с учетом геометрических размеров элементов рулевого привода и управляемых колес.
| US 2005126843 A1, 16.06.2005 | |||
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| САМОХОДНОЕ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2048348C1 |
| US 2005217906 A1, 06.10.2005 | |||
| Горизонтальный прямоточный компрессор двойного действия | 1949 |
|
SU79512A1 |

