УРОВЕНЬ ТЕХНИКИ
Изобретение относится к улучшениям в, или относящимся к комбинациям транспортного средства и прицепа. Изобретение особенно полезно в ситуациях, в которых прицеп буксируется, чтобы выполнять повторные проходы по участку, такому как пахотное поле.
В области техники сельскохозяйственных машин и других секторах транспортной промышленности широко известно, что следует буксировать колесный или иным образом взаимодействующий с грунтом (например, посредством полозьев или гусениц) прицеп за самоходным транспортным средством, так чтобы прицеп мог выполнять конкретные задачи.
В сельском хозяйстве, в большинстве случаев, транспортным средством является трактор.
Примером прицепа, к которому в частности относится изобретение, является пресс-подборщик или подборочная машина. Он создает тюки ценных стеблевых (или других составляющих растения) продуктов, таких как сено, силосная растительность и солома, которые укладываются на полях по мере того, как происходят операции жатвы или скашивания. Такие продукты в материалах настоящей заявки упоминаются как «продукты жатвы». В большинстве случаев, пресс-подборщик не является ни автономным, ни самоходным, а взамен, буксируется за сельскохозяйственным трактором, с которого он получает мощность вращения для приведения в действие своих компонентов подбирающего барабана и внутренних механизмов.
Сено, солома или аналогичные продукты, требующие подбора и прессования в тюки, обычно оставляются на полях в виде валков или полос скошенного жнивья, то есть, длинных рядов продуктов, о которых идет речь, которые нагромождены по центру в поперечном направлении и имеют тенденцию уплощаться на соответственных кромках в поперечном направлении. Хотя, согласно некоторым определениям, есть различия, например, между валками и полосами скошенного жнивья, кроме тех случаев, где требует контекст, в материалах настоящей заявки эти термины используются взаимозаменяемо.
Каждый валок обычно продолжается в виде как можно более прямой линии почти по всей длине поля или вдоль линий, которые равноудалены от периферии поля или от контуров поля. Типично, поле, которое подверглось жатве, содержит много по существу взаимно параллельных валков.
Изобретение применимо при использовании прессов-подборщиков для подбора и прессования в тюки продуктов жатвы, таких как стебли или другие части растений, в уложенном в валках виде или в полосах скошенного жнивья, созданных основной операцией, такой как жатва или скашивание; или вспомогательной операцией, такой как сгребание, ворошение или разматывание сена.
Однако, изобретение также применимо в случае буксировки иного типа прицепа, нежели пресс-подборщика. В качестве примера, в этом отношении, можно рассмотреть случай трактора, поддерживающего и, в силу этого, тянущего орудие, такое как плуг, борона или аналогичное пахотное устройство. Еще одним примером является случай трактора, буксирующего засевной прицеп или опыляющий посевы/удобряющий поле прицеп без механического привода.
Изобретение потенциально также полезно в большом многообразии дополнительных ситуаций, в которых прицеп буксируется транспортным средством. Таковые могут включать в себя как внедорожные ситуации, которые возникают на пахотных полях, как кратко изложено, и когда транспортное средство буксирует прицеп на проезжей части дороги или в другой мощеной зоне.
Как подразумевается выше, комбинация трактора и пресса-подборщика является иллюстрирующей изобретение. Это частично происходит потому, что комбинации трактора и пресса-подборщика типично выполняют повторные проходы вдоль полос скошенного жнивья на поле, как дополнительно пояснено ниже.
Прессы-подборщики подразделяются на несколько категорий. Наиболее распространенными типами, используемыми в настоящее время, являются типы для производства так называемых «рулонных» тюков обычно из сена или соломы (которые являются приблизительно цилиндрическими); и типы для создания так называемых «прямоугольных» или «квадратных» тюков (которые имеют форму параллелепипеда). Каждый тип тюки связан с конкретными характеристиками хранения и транспортировки.
Среди тюковых прессов-подборщиков, самые распространенные типы производят «большие прямоугольные тюки» или «средние прямоугольные тюки». Как подразумевают названия, первые больше последних.
Независимо от точного типа, при использовании, пресс-подборщик прицеплен к задней части трактора, и вал отбора мощности (РТО) трактора присоединен, чтобы выдавать привод вращения на пресс-подборщик. Вал РТО вращается с частотой вращения, определяемой настройками двигателя трактора и, в ряде случаев, некоторыми другими переменными параметрами, которые, например, выполнены с возможностью настраиваться водителем трактора или в результате автоматических или полуавтоматических управляющих воздействий, инициированных в тракторе или прессе-подборщике, таких как когда один или более датчиков вырабатывают конкретный выходной сигнал, класс выходного сигнала, значение или диапазон. Типично, вал РТО включает в себя универсальный карданный шарнир или аналогичное гибкое передающее привод устройство, с тем результатом, что соединение с прессом-подборщиком не должно быть расположено прямо на одной прямой с соединением РТО на тракторе, а взамен может быть смещено от него в боковом направлении.
Вал РТО обеспечивает привод вращения для различных частей пресса-подборщика, которые движутся, чтобы вызывать прием внутрь и прессование в тюки стеблей. US-4433533-A включает в себя пояснение работы рулонного пресса-подборщика. Пример работы тюкового пресса-подборщика описан в FR-2684517-А.
При использовании комбинации трактора и пресса-подборщика, трактор буксирует пресс-подборщик по очереди вдоль каждого валка, от одного края поля до другого, причем, подбирающий барабан принимает внутрь продукты жатвы, требующие подбора и прессования в тюки. Это вызывает уборку продуктов жатвы, формирующих валки по мере того, как формируются тюки. В конце каждого валка, который был принят внутрь таким образом и сформирован в тюки, комбинация трактора и пресса-подборщика разворачивается в поворотной полосе поля и проходит в противоположном направлении по полю, чтобы побуждать подбор и прессование в тюки продуктов жатвы следующего по очереди валка, подлежащего подбору и прессованию в тюки.
Успешно подобранные и спрессованные в тюки валки почти всегда продолжаются параллельно друг другу вдоль поля. Иногда, комбинация трактора и пресса-подборщика будет способна подбирать и прессовать в тюки по очереди каждый следующий смежный валок. В других ситуациях, полевые условия, такие как ширина поворотной полосы и расстояния между центрами валков (в свою очередь, определяемые, например, шириной жатки уборочного комбайна или другой машины, используемой во время основной уборочной операции), диктуют, что комбинация трактора и пресса-подборщика должна подбирать и прессовать в тюки по очереди, например, каждый второй в поперечном направлении валок, причем, валки, которые в результате в начале не подбираются, подбираются и прессуются в тюки во время более поздних проходов комбинации трактора и пресса-подборщика по полю.
В любом случае, проблема, связанная с использованием комбинации трактора и пресса-подборщика, состоит в том, что может существовать любое из некоторого количества неблагоприятных условий в одном или некоторых из валков, но не всех из них.
Примеры таких неблагоприятных условий включают в себя, но не в качестве ограничения, препятствия или артефакты, такие как электрические или телеграфные столбы, пилоны, конструктивные элементы и развалины зданий, кабели, трубопроводы, агрохимические мешки, баки, топливозаправщики и другие емкости для жидкости, деревья, вторгающиеся ветви и кусты; завершенные тюки и стопы тюков; особенности рельефа, такие как впадины в земле, склоны, насыпи и увалы; почвенные условия, такие как влажная, песчаная, болотистая, каменистая почва; и условия продуктов жатвы, такие как высокие уровни влажности. Более того, сельскохозяйственные поля все больше и больше становятся многоцелевыми и, в результате, могут содержать нетрадиционные признаки, такие как ветряки, солнечные батареи и управляющее/передающее оборудование для такой технологии. Эти признаки представляют собой дополнительные источники опасности для комбинаций транспортных средств и прицепов.
Работа сельскохозяйственных машин в последние годы постепенно стала автоматизированной или по меньшей мере подверженной аспектам автоматизации. Автоматизированные системы, которые использовались до сих пор, неспособны справляться с неблагоприятными условиями, как проиллюстрированные выше.
В этом отношении, само собой разумеется, что автоматизированная система управления трактором, которая не осведомлена о физических источниках опасности, таких как препятствия на ее намеченной траектории, может быть вовлечена в аварию, которая могла бы вывести из строя трактор, повредить или разрушить препятствие или иметь даже еще более серьезные последствия. Есть необходимость принять меры в ответ на этот недостаток систем управления транспортным средством.
Даже когда условия в поле не включают в себя препятствия, остается необходимость, чтобы буксирующий трактор справлялся с переходами с одной части поля на другую. Так, например, если меняется влагосодержание продуктов жатвы, или изменяется наклон поля с места на место желательно, чтобы любая автоматизированная или частично автоматизированная система управления была способна производить корректировки в настройках трактора, для того чтобы минимизировать воздействие таких изменений.
Известно, что следует оснащать тракторы и некоторые другие типы буксирующего транспортного средства датчиками, назначение которых состоит в том, чтобы считывать путь перед транспортным средством и выдавать входные сигналы в автоматизированную или полуавтоматическую систему управления, как описано выше. Такие датчики включают в себя оптические устройства, такие как камеры на приборе с зарядовой связью (которые могут быть одиночными устройствами или системами стереовидения, применяющими две камеры, такие как две камеры RGB, как будет привычно специалисту в данной области техники), радиолокационные датчики и акустические датчики, и они помогают трактору уклоняться от некоторых типов источников опасности, которые лежат на его намеченном маршруте. Датчики, которые считывают путь впереди транспортного средства, такого как трактор, однако, имеют ограниченную пользу в ситуациях, как описанная выше.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно изобретению, в первом аспекте предусмотрена комбинация подвижного транспортного средства и прицепа, включающая в себя (а) самоходное транспортное средство, имеющее один или более взаимодействующих с поверхностью элементов и рулевой механизм для управления направлением движения по меньшей мере одного упомянутого взаимодействующего с поверхностью элемента, с тем чтобы вызывать изменения направления движения транспортного средства; (b) прицеп, который буксируется транспортным средством при движении транспортного средства вперед, и шарнирно присоединен к транспортному средству; (с) один или более действующих в прямом направлении датчиков для считывания одного или более объектов и/или артефактов, и/или условий, расположенных впереди транспортного средства; (d) один или более действующих в боковом направлении датчиков для считывания одного или более объектов и/или артефактов, и/или условий, которые при считывании расположены сбоку от транспортного средства и/или прицепа; и (е) устройство управления и/или обработки, которое действует в зависимости от по меньшей мере одного выходного сигнала одного или более действующих в боковом направлении датчиков, чтобы учитывать наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков.
В качестве примеров взаимодействующих с поверхностью элементов, можно рассматривать колеса (которые могут быть оснащены шинами, или без шин); гусеницы; полозья и даже признаки водного судна, такие как корпус, рули направления и обтекатели.
Преимущество изобретения состоит в том, что оно дает комбинации транспортного средства и прицепа, которая, например, осуществляет многократные проходы вдоль полос скошенного жнивья или аналогичных удлиненных признаков, возможность принимать оптимизированную траекторию движения относительно источника опасности, препятствия или условия до начала прохода траектории, которая пересекается с источником опасности, объектом или условием. В свою очередь, это доводит до максимума как безопасность, так и эффективность работ.
Во избежание неопределенности, существование или положения одного или более в еще не подобранном виде валков может быть включено в условия или артефакты, считываемые действующим в боковом направлении датчиком.
Кроме того, во избежание неоднозначности, один или более действующих в прямом направлении датчиков и один или более действующих в боковом направлении датчиков могут представлять собой или могут быть функциональными частями одного и того же устройства с датчиками. В таком варианте осуществления изобретения, устройство с датчиками было бы действующим, чтобы считывать обширное в трех измерениях поле обзора, такое как большая часть или вся сфера или круг. Технологии упорядочения и обработки данных облака точек, как было бы знакомо специалисту, могли бы быть применены для анализа входных сигналов такого датчика и формирования команд управления в результате.
Предпочтительно, один или более действующих в боковом направлении датчиков считывают поле обзора, которое является по меньшей мере двухмерным многоугольником, расположенным сбоку от транспортного средства и/или прицепа, расположение многоугольника перемещается при движении комбинации транспортного средства и прицепа, чтобы определять траекторию поля обзора, приближающуюся к траектории комбинации транспортного средства и прицепа.
Кроме того предпочтительно, по меньшей мере один упомянутый действующий в боковом направлении датчик является или включает в себя оптическую или формирующую облако точек камеру, хотя другие формы датчика, как пояснено в материалах настоящей заявки, жизнеспособны в пределах объема изобретения. Комбинации разных типов датчиков в одной и той же комбинации транспортного средства и прицепа также возможны.
Традиционно, устройство управления и/или обработки присоединено, чтобы приводить в действие рулевой механизм транспортного средства, так чтобы комбинация транспортного средства и прицепа следовала траектории движения, которая учитывает наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков. Как следствие, комбинация транспортного средства и прицепа может быть ответственна не только за определение оптимальной траектории движения, которая учитывает источники опасности, например, в ожидаемых проходах вдоль поля, но также за побуждение транспортного средства, а отсюда также и прицепа придерживаться такой оптимизированной траектории движения.
В частности, в предпочтительных вариантах осуществления изобретения, устройство управления и/или обработки приводит в действие рулевой механизм, чтобы управлять направлением движения комбинации транспортного средства и прицепа, так чтобы избегать одного или более объектов и/или артефактов и/или условий, считанных одним или более действующих в боковом направлении датчиков. Такое уклонение, например, может включать в себя изменение маршрута от обычного в других обстоятельствах прохода или полную отмену прохода, который в иных обстоятельствах требовал бы объезда. Определение точной разновидности маневра уклонения может устанавливаться на основании некоторого количества параметров, таких как, но не в качестве ограничения, габариты и/или мощность комбинации транспортного средства и прицепа, любой преобладающий уклон или другие условия, находящиеся поблизости от или определяющие источник опасности, различные настройки транспортного средства и масштаб источника опасности.
Ввиду вышеизложенного, по выбору, устройство управления и/или обработки приводит в действие рулевой механизм, чтобы управлять направлением движения комбинации транспортного средства и прицепа, так чтобы оптимизировать расположение транспортного средства и/или прицепа относительно одного или более объектов и/или артефактов и/или условий, считанных одним или более действующих в боковом направлении датчиков. Таким образом, один из полезных способов уклонения, например, может включать в себя минимизацию отклонения комбинации транспортного средства и прицепа от обычного прохода, которое необходимо, чтобы избежать выявленного источника опасности.
Более подробно, в предпочтительных вариантах осуществления изобретения, один или более действующих в боковом направлении датчиков считывают один или более объектов и/или артефактов, расположенных сбоку от транспортного средства или прицепа, во время прохождения комбинации транспортного средства и прицепа вдоль первого валка на поле, встреченного комбинацией транспортного средства и прицепа; и устройство управления и/или обработки побуждает комбинацию транспортного средства и прицепа учитывать наличие одного или более объектов и/или артефактов, считанных одним или более действующих в боковом направлении датчиков, во время прохождения комбинации транспортного средства и прицепа вдоль встреченного впоследствии валка на поле.
Другими словами, особенно предпочтительный вариант осуществления изобретения определенно пригоден для использования на сельскохозяйственном поле, содержащим на себе множество валков жнивья. Однако, как отмечено в материалах настоящей заявки, другие варианты осуществления изобретения жизнеспособны в многообразии других ситуаций, в которых ведущее транспортное средство буксирует прицеп.
В необязательном улучшении изобретения, устройство управления и/или обработки наносит на карту местоположения объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков.
Это особенно полезно в сельскохозяйственных ситуациях, в которых один или более источников опасности имеют постоянный характер, а отсюда, будут встречаться из года в год во время полевых работ. Многие разновидности источников опасности попадают в эту категорию, как будет известно специалисту в данной области техники. Нанесение на карту источников опасности дает возможность учитывать их наличие в течение длинных периодов, таких как из года в год или как в начале, так и в конце вегетационного периода.
Данные нанесенных на карту источников опасности могут храниться в допускающей передачу форме, так чтобы транспортные средства, иные чем у действующего в боковом направлении датчика, который считал наличие источника опасности, могли извлекать выгоду из картографической деятельности.
Обычно, устройство управления и/или обработки наносит на карту местоположение одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков, которые не считываются одним или более действующих в прямом направлении датчиков.
Одно из преимуществ данного аспекта изобретения состоит в том, что действующий в боковом направлении датчик может быть действующим для нанесения на карту признаков, когда обращенный вперед датчик представляется недействующим. Например, это может происходить в результате пыли, общего источника опасности на сельскохозяйственных полях, которая заслоняет линию прямой видимости обращенного вперед датчика; или неблагоприятных погодных явлений, таких как сильный дождь, снег, дождь со снегом или туман.
В этом отношении, в некоторых вариантах осуществления может быть желательно, чтобы данный или каждый действующий в прямом направлении датчик не считывал в точности те же самые явления, что и данный или каждый действующий в боковом направлении датчик.
Таким образом, например, если предусмотрены оба, действующий в переднем направлении и действующий в боковом направлении, оптических датчика, их выходные сигналы могли бы фильтроваться по разному, так чтобы они не считывали один и тот же диапазон длины световой волны. В качестве альтернативы, соответственные действующий в прямом направлении и действующий в боковом направлении датчики могли бы работать согласно взаимно различающимся физическим принципам.
Более конкретно, что касается нанесения на карту расположений источников опасности, предпочтительно, устройство управления и/или обработки наносит на карту одну или более промежуточных точек, приближающихся к траектории комбинации трактора и пресса-подборщика, в поле обзора траектории, считываемом действующим в боковом направлении датчиком, когда последнее является формой поля обзора, сформированного действующим в боковом направлении датчиком.
Как отмечено в материалах настоящей заявки, транспортное средство является сельскохозяйственным трактором, а прицеп является буксируемой сельскохозяйственной техникой. Кроме того, однако, как отмечено, транспортное средство и прицеп могут принимать многообразие других форм.
Согласно дополнительному аспекту изобретения, предусмотрен способ эксплуатации комбинации транспортного средства и прицепа согласно изобретению, как определено в материалах настоящей заявки, включающий в себя этапы (а) побуждения одного или более действующих в боковом направлении датчиков считывать один или более объектов и/или артефактов, и/или условий, которые при считывании расположены сбоку от транспортного средства и/или прицепа; и (b) побуждения устройства управления и/или обработки действовать в зависимости от по меньшей мере одного выходного сигнала одного или более действующих в боковом направлении датчиков, чтобы учитывать наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков.
Такой способ по выбору может включать в себя этап (с) побуждения устройства управления и/или обработки приводить в действие рулевой механизм транспортного средства, так чтобы комбинация транспортного средства и прицепа следовала траектории движения, которая учитывает наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков; и/или этап (d) побуждения устройства управления и/или обработки приводить в действие рулевой механизм, так чтобы комбинация транспортного средства и прицепа избегала один или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков. Преимущества таких аспектов способа по изобретению аналогичны преимуществам эквивалентов устройства, как описано и пояснено в материалах настоящей заявки.
По выбору, когда транспортным средством является сельскохозяйственный трактор, а прицепом является буксируемая сельскохозяйственная техника, специфичная форма способа по изобретению включает в себя приведение в действие одного или более действующих в боковом направлении датчиков, чтобы считывали один или более объектов и/или артефактов, расположенных сбоку от транспортного средства или прицепа, во время прохождения комбинации транспортного средства и прицепа вдоль первого валка на поле, встреченного комбинацией транспортного средства и прицепа; и (f) побуждение устройства управления и/или обработки приводить в действие рулевой механизм для управления направлением движения комбинации транспортного средства и прицепа, чтобы учитывать наличие одного или более объектов и/или артефактов, считанных одним или более действующих в боковом направлении датчиков, во время прохождения комбинации транспортного средства и прицепа вдоль встреченного впоследствии валка на поле.
Предпочтительно способ включает в себя побуждение устройства управления и/или обработки наносить на карту местоположения объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков, и/или одну или более промежуточных точек.
Преимущества аспектов, таких как изложенные выше, аналогичны эквивалентным признакам устройства по изобретению, на которых они основаны.
Предпочтительно, способ по изобретению включает в себя этап побуждения устройства управления и/или обработки оценивать одно или более из (i) абсолютного количества не спрессованных в тюки продуктов жатвы в валке; и/или (ii) абсолютного количества не спрессованных продуктов в множестве валков; и/или (iii) удельного количества не спрессованных продуктов жатвы на единицу длины одного или более валков, и расчета одного или более параметров из них.
Такие параметры, например, могут включать в себя количество оставшихся могущих быть созданными тюков на поле или части поля; оцененное время, требуемое для завершения подбора и прессования в тюки на поле или части поля; и/или количество тюков, которое можно произвести до истечения периода времени, такого как рабочая смена водителя трактора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее следует описание предпочтительных вариантов осуществления изобретения, в качестве неограничивающего примера, с осуществлением ссылки на прилагаемые чертежи, на которых:
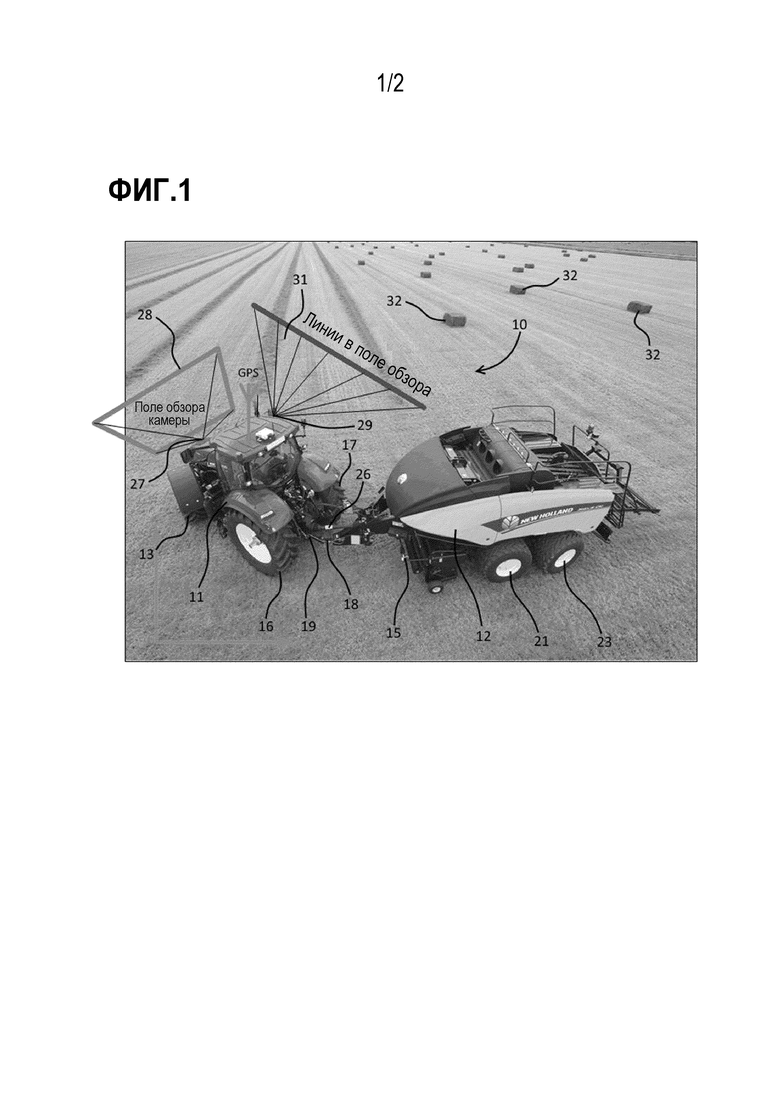
фиг. 1 - вид в перспективе комбинации транспортного средства и прицепа согласно изобретению в виде трактора, буксирующего пресс-подборщик в поворотной полосе сельскохозяйственного поля, содержащего на себе множество валков продуктов жатвы; и
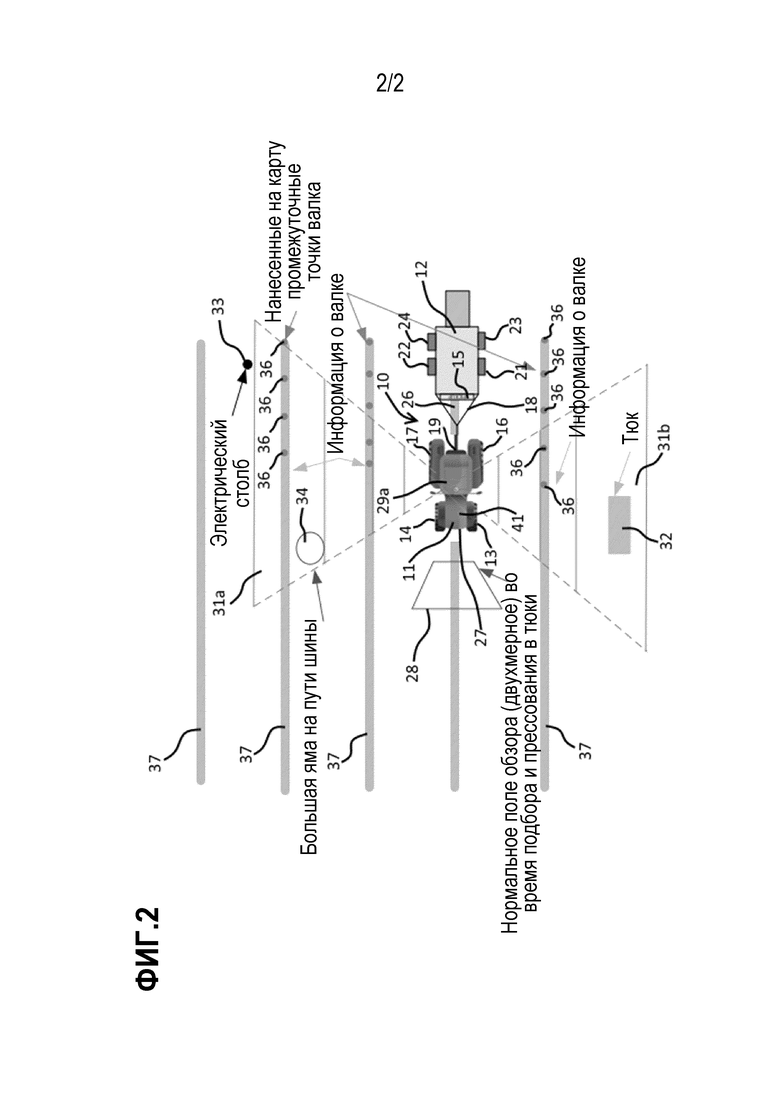
фиг. 2 - схематический вид сверху варианта осуществления по фиг. 1 во время прохода вдоль одного из валков по фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на чертежи, комбинация 10 подвижного транспортного средства и прицепа согласно изобретению в предпочтительном варианте осуществления включает в себя сельскохозяйственный трактор 11, который буксирует пресс-подборщик 12.
Как упомянуто, комбинация 10 транспортного средства и прицепа может принимать многообразие разных форм, но проиллюстрированная комбинация 11, 12 трактора и пресса-подборщика является иллюстрирующей принципы и конкретные детали изобретения.
Таким образом, трактор 11 является примером (многих возможных типов транспортного средства) самоходного транспортного средства. Трактор 11 является самоходным в том смысле, то он включает в себя дизельный двигатель, источник топлива в виде бака с дизельным топливом и топливной системы и привод на ведущие колеса, включающий в себя многочисленные ведущие валы, трансмиссию и типично по меньшей мере одно сцепление или другое устройство выбора привода, все из которых знакомы специалисту в данной области техники.
Трактор 11 включает в себя по меньшей мере один взаимодействующий с поверхностью элемент в виде множества вращающихся, снабженных шинами левого и правого переднего колес 13, 14, и левого и правого задних колес 16, 17, которые поддерживают трактор 11 и дают возможность его движения. Как это часто бывает в конструкции сельскохозяйственных тракторов, задние колеса 16, 17 имеют больший диаметр, чем передние колеса 13, 14.
Колеса 13, 14, 16, 17 также выполнены некоторым образом, который привычен специалисту в данной области техники. По меньшей мере задние колеса 16, 17 с возможностью передачи приводного усилия присоединены к приводу на ведущие колеса, упомянутому выше, так чтобы они приводились в движение, чтобы вращаться вокруг общей, продолжающейся горизонтально оси, когда привод на ведущие колеса включен и приводится в действие. В некоторых тракторах, передние колеса 13, 14 также присоединены с возможностью передачи приводного усилия к приводу на ведущие колеса подобным образом. Приведение в движение колес таким образом вызывает движение трактора 11 вперед или, если выбрано передаточное число заднего хода трансмиссии, назад по земле.
Передние колеса 13, 14 присоединены к рулевому механизму. Это не проиллюстрировано подробно, но может иметь конструкцию, которая привычна в данной области техники. В такой компоновке, передние колеса 13, 14 установлены на поворотных ступицах рулевого механизма, с тем чтобы быть поворачиваемыми вокруг соответственных левой и правой, продолжающихся вертикально осей поворота.
Жесткий рычажный механизм, с возможностью поворота соединяет ступицы рулевого механизма в местах, отнесенных назад от продолжающихся вертикально осей поворота. Рычажный механизм с возможностью передачи приводного усилия присоединен к картеру рулевого механизма или подобному приводу, с тем чтобы быть подвижным поперечно относительно трактора 11. Работа картера рулевого механизма побуждает рычажный механизм перемещаться влево и вправо по желанию, с тем результатом, что ступицы рулевого механизма одновременно поворачиваются вокруг левой и правой продолжающихся вертикально осей поворота.
Трактор 11 включает в себя кабину оператора, которая включает в себя различные органы управления для управления работой трактора 11. В числе таковых включены в состав вращающееся рулевое колесо, или подобное входное звено рулевого управления, которое присоединено к рулевой колонке. Рулевая колонка с возможностью вращения установлена в подшипниках и продолжается из кабины в картер рулевого механизма. Вращение рулевого колеса вызывает функционирование картера рулевого механизма для осуществления управления направлением движения передних колес, как описано выше.
В многих современных тракторах, рулевой механизм также включает в себя двигатель, такой как электрический или гидравлический двигатель, который способен вводить в действие картер рулевого механизма (или эквивалентное устройство, если оно предусмотрено) без необходимости в том, чтобы оператор транспортного средства вращал рулевое колесо. Такая компоновка действует на основе команд, сформированных в устройстве управления и/или обработки, таком как, но не в качестве ограничения, микропроцессор, формирующем часть или по меньшей мере функционально присоединенном к трактору 11.
Как результат, трактор может быть выполнен с возможность для автоматизированного или полуавтоматического управления направлением движения, причем, направление рулевого управления передними колесами 13, 14, например, определяется на основании программ программируемого устройства, формирующего часть устройства управления и/или обработки, выходных сигналов одного или более датчиков, формирующих часть трактора, данных, таких как данные карты поля, хранимые в устройстве памяти, комбинации таких источников влияния или широкого диапазона других источников информации, которые были бы известны специалисту в данной области техники. Действительно, в некоторых формах трактора, рулевое колесо и рулевая колонка могут быть отсоединены, или без них можно полностью обойтись, а направление движения трактора управляется полностью на основе выходного сигнала устройства управления. Однако, чаще, рулевое колесо и рулевая колонка остаются в действующем состоянии во время автоматического или полуавтоматического управления направлением движения и просто не используются никаким оператором в такое время.
Трактор 11 также может включать в себя рулевой механизм для задних колес, хотя это бывает сравнительно редко. Если предусмотрен, такой механизм может быть подобен устройствам, описанным выше.
Как широко известно, рулевой механизм трактора 11 таков, что, когда он вводится в действие, в то время как трактор поступательно движется под действием мощности, выдаваемой из двигателя через привод на ведущие колеса, траектория движения трактора меняется в зависимости от величины, на которую поворачиваются управляемые рулем колеса.
Пресс-подборщик 12 буксируется за трактором 11 по мере того, как последний движется вперед по земле. Буксировка пресса-подборщика 12 достигается посредством использования тягового бруса 18, который, в типичной комбинации, шарнирно прикреплен на своем переднем при использовании конце к буксировочному сцепному устройству 19, расположенному в задней части трактора 11, между задними колесами 13, 14. Тяговый брус 18, в типичной установке, как проиллюстрировано, жестко прикреплен к передней при использовании стороне пресса-подборщика 12.
Пресс-подборщик 12 включает в себя по меньшей мере один взаимодействующий с поверхностью элемент. В примере, проиллюстрированном на фигурах, пресс-подборщик, в этом отношении, включает в себя четыре грунтозацепных вращающихся передних 21, 22 и задних 23, 24 колеса, которые поддерживают пресс-подборщик 12 и дают ему возможность буксироваться по полям и на дорогах. Колеса 21, 22, 23, 24 не имеют силового привода, хотя, как проиллюстрировано на фиг. 1, задние колеса 23, 24 выполнены с возможностью пассивно подруливать в случае, если пресс-подборщик 12 следует по криволинейной или другой непрямой траектории. Известные различные механизмы для достижения этого эффекта, которые не относятся к изобретению непосредственно, а потому, в материалах настоящей заявки подробно не описаны.
В альтернативных формах пресса-подборщика 12, например, могут быть предусмотрены две параллельных оси неуправляемых колес, или единственная ось, в зависимости от факторов, таких как масса и несущая способность пресса-подборщика 12. Более того, когда одна из двух осей является слушающейся руля, как указано, можно, чтобы передняя ось (то есть, передние колеса 21, 22) слушалась руля вместо колес 23, 24 задней оси, как проиллюстрировано. Кроме того, дополнительная возможность состоит в том, чтобы как передние, так и задние оси были слушающимися руля, в силу чего, все четыре колеса 21, 22, 23, 24 пресс-подборщика 12 способны изменять ориентацию относительно остальной части пресс-подборщика 12.
Вообще, любое управление направлением движения колес пресс-подборщика 12, как указано, является «пассивным» в том смысле, что слушающиеся руля колеса реагируют на изменения направления пресс-подборщика в ответ на изменения траектории движения трактора 11, побуждающие меняться линию движения пресса-подборщика 12. Однако, по меньшей мере теоретически возможно, чтобы пресс-подборщик включал в себя один или более механизмов с силовым приводом для осуществления управления направлением движения одного или более управляемых рулем колес.
Как пояснено, пресс-подборщик 12 буксируется за трактором 11. Почти во всех случаях, пресс-подборщик не несет своего собственного источника энергии и, взамен, отбирает мощность для своего функционирования из трактора 11.
Типично, это достигается благодаря использованию вала 2 6 отбора мощности вращения, который присоединен к механизму отбора мощности, который обычно присутствует в задней части трактора 11 и присоединяется, чтобы приводить в движение действующие части пресса-подборщика 12. Такие части включают в себя подбирающий барабан 15 в передней части пресса-подборщика и различные внутренние части, которые функционируют, чтобы формовать тюки из продуктов жатвы, определяющих валки, как описано выше. Основная работа пресса-подборщика, например, описана в документах предшествующего уровня техники, упомянутых выше, и в материалах настоящей заявки не повторяется.
Комбинация трактора и пресса-подборщика равнозначна состоящему из двух частей составу транспортных средств, в котором пресс-подборщик 12 следует за трактором 11. Изменения направления трактора 11 повторяются прессом-подборщиком 12, хотя, по различным основанным на кинематике причинам, пресс-подборщик 12 не придерживается траектории движения трактора 11 в точности.
Трактор 11 включает в себя, что типично на современных тракторах, обращенное вперед устройство с датчиками, такое как камера 27. Если воплощен в виде камеры 27, датчик, например, может быть прибором с зарядовой связью или может принимать ряд других форм. Также можно, чтобы датчик действовал на основе других физических принципов, таких как звуковой локатор или другие акустические эффекты, радиолокатор или ряд других явлений, таких как, но не в качестве ограничения, эффект Доплера.
Еще одной формой датчика, которая жизнеспособна в пределах объема изобретения, является стереоскопическая оптическая система камер. В такой компоновке, две (формирующих цветные изображения) камеры «RGB» расположены в горизонтально взаимно разнесенной расстановке. Обрабатывающее программное обеспечение, связанное с устройством 41 управления и/или обработки, формирующим часть устройства по изобретению, может интерпретировать выходные сигналы таких камер, для того чтобы формировать трехмерное изображение или двухмерное представление такого изображения.
Камера 27 определяет обращенное вперед поле 28 обзора, как схематически обозначено на чертежах. Выходной сигнал камеры подается в устройство 41 управления и/или обработки, формирующее часть или по меньшей мере функционально присоединенное к трактору 11, с целью анализа артефактов, которые находятся перед трактором 11.
Устройство 41 управления и/или обработки может быть программируемым, но не обязательно должно быть именно так. Основное назначение устройства управления и/или обработки в контексте камеры 2 7 состоит в том, чтобы оценивать признаки пути перед трактором 11 по мере того, как он движется вперед по полю.
Если трактор 11 включает в себя функциональные возможности автоматического или полуавтоматического рулевого управления, как описано выше, устройство управления и/или обработки может использовать сигналы (которые типично являются электрическими или радиосигналами, или могут принимать многообразие других форм, которые приходили бы на ум специалисту в данной области техники), полученные от действия камеры, для оказания влияния на управление направлением движения трактора 11, а отсюда, комбинации 11, 12 трактора и пресса-подборщика.
Такие сигналы могут использоваться для формирования команд для двигателя, упомянутого выше, который присоединен к картеру рулевого механизма. Как результат, трактор 11, например, может побуждаться действенным образом придерживаться направления валка вдоль поля.
В этом отношении, валки не обязательно или даже очень часто не соблюдают прямые линии. Это может быть потому, что линия валка во время создания находилась под влиянием признаков поля и изменений направления уборочной машины, которая привела к возникновению валка. Кроме того, валки типично проявляют изменчивость вдоль своей длины. Таким образом, часть валка, проявляющая высшую плотность продуктов жатвы, не всегда может находиться в центре в поперечном направлении валка. Желательно, чтобы трактор был способен корректировать поперечное положение пресса-подборщика 12 относительно валка, для того чтобы доводить до максимума количество растительного материала или других продуктов жатвы, принимаемых через поперечно центральную часть подбирающего барабана пресса-подборщика.
Обращенный вперед датчик, такой как камера 28, фактически принимает во внимание признаки, отклонения и артефакты, как описано в материалах настоящей заявки, только на пути перед трактором.
Такая компоновка, поэтому, может иметь дело только с теми признаками, изменениями и артефактами, которые поддаются обнаружению на траектории движения, в процессе следования которой находится трактор. Это в свою очередь означает, что эффективность выбора траектории движения может быть не лучшей, например, если датчик не выявляет некоторое препятствие, чтобы плавно продвигаться до тех пор, пока трактор 11 еще не следует траектории движения, которая вызвала бы пересечение препятствия.
В такой ситуации, устройство управления и/или обработки может пытаться реагировать на препятствие, при выявлении, побуждая трактор 11 сворачивать в сторону, чтобы уклониться от препятствия. Это давало бы в результате прерывание приема продуктов жатвы в пресс-подборщик 12 с сопутствующими неблагоприятными воздействиями на плотность и целостность тюки. Кроме того, любой маневр уклонения над частью трактора 11 может побуждать колеса трактора 11 и/или пресса-подборщика 12 переезжать через валок. Это изменяет плотность продуктов жатвы и может затруднять прессу-подборщику 12 подбор продуктов жатвы во время последующего прохода.
В предельном случае, обращенный вперед датчик может выявлять препятствие слишком поздно, чтобы трактор предпринял эффективное уклоняющееся действие. Как результат, трактор 11 или пресс-подборщик 12 могут вступать в контакт с препятствием. Ясно, что эта ситуация была бы крайне нежелательна.
Цель изобретения состоит в том, чтобы устранить неблагоприятные ситуации, такие как описанные выше. С этой целью, трактор 11 и/или пресс-подборщик 12 (или другой прицеп, если прицепом является не пресс-подборщик) могут включать в себя один или более действующих в боковом направлении датчиков для считывания одного или более объектов и/или артефактов, и/или условий, которые при считывании расположены сбоку от транспортного средства и/или прицепа. Устройство управления и/или обработки, в таком случае, может действовать в зависимости от по меньшей мере одного выходного сигнала одного или более действующих в боковом направлении датчиков, чтобы учитывать наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков, и, тем самым, избегать недостатков, указанных выше.
Более подробно, в предпочтительных вариантах осуществления изобретения, как проиллюстрировано, один или более действующих в боковом направлении датчиков могут быть или могут включать в себя обращенное в боковом направлении устройство, такое как обращенная в боковом направлении камера 29.
Как и в случае действующего в прямом направлении датчика, камера 2 9 может быть прибором с зарядовой связью или другим оптическим датчиком; или она может функционировать на основе иного физического принципа, такого как, но не в качестве ограничения, радиолокационное, акустическое восприятие или восприятие эффекта Доплера, как описано выше.
Как лучше всего проиллюстрировано на фиг. 1, единственный действующий в боковом направлении датчик, такой как камера 2 9, создает поле 31 обзора, которое может быть двухмерным многоугольником, таким как проиллюстрированный треугольник, или другим пространством правильной или неправильной формы, или трехмерным пространством, продолжающимся по одну сторону от трактора 11. Такое поле 31 обзора может предоставлять камере 29 возможность считывать, до прохождения трактора 11 по траектории движения, содержащей их, источники опасности и препятствия описанных выше разновидностей.
Примеры таких признаков видны на фиг. 1 и 2 и включают в себя, но не в качестве ограничения, расположенные сбоку тюки 32, пилоны или столбы 33 для кабелей или телекоммуникационного оборудования, особенности местности, такие как углубления или ямы 34, которые могли бы быть затруднительны для преодоления шинами трактора 11 или пресса-подборщика 12, или любые другие типы источника опасности, описанные в материалах настоящей заявки. Существование действующего в боковом направлении датчика означает, что устройство обработки может рассчитывать маршрут для комбинации 11, 12 трактора и пресса-подборщика, который учитывает такие источники опасности, прежде, чем трактор 11 начинает проход, который, иначе пересекся бы с источником(ами) опасности, о которых идет речь. Устройство обработки, в таком случае, может производить команды рулевого управления, которые вводят в действие двигатель картера рулевого механизма, так чтобы трактор 11 придерживался траектории движения, учитывающей выявленные источники опасности, и т.д.
Это, в свою очередь, может привести к значительным улучшениям эффективности, с которой комбинация 11, 12 трактора и пресса-подборщика движется по полю. В качестве неограничивающего примера, в этом отношении, устройство управления и/или обработки может быть запрограммировано избегать начала прохода, который пересекает источники опасности, до тех пор, пока не были завершены все возможные неопасные проходы на поле. С проходами, вызывающими пересечение с источниками опасности, в таком случае, можно иметь дело в конце операций подбора и прессования в тюки на поле, и можно признать, что тюки, получающиеся в результате таких пересекающихся с источниками опасности проходов, не высшего качества, а отсюда, требуют специальной обработки. Конечно, и другие основные принципы управления возможны и могут быть запрограммированы в устройстве управления и/или обработки, при условии, что оно является программируемым, что вероятно имеет место.
Другие способы оптимизации и уклонения относительно источников опасности, выявленных действующим в боковом направлении датчиком(ами), могут быть переняты дополнительно или в качестве альтернативы. Однако, типично, независимо от точных основных принципов, перенятых для учета выявленных источников опасности, устройство по изобретению функционирует, чтобы модифицировать последующий проход комбинации 11, 12 трактора и пресса-подборщика по полю на основании выходных сигналов одного или более действующих в боковом направлении датчиков, сформированных во время предыдущего прохода по полю.
Устройство по изобретению может быть высоко эффективным, если оно включает в себя одиночный действующий в боковом направлении датчик, как описано; но большая польза от изобретения может быть действительна, если действующее в боковом направлении считывание возможно с обеих сторон от комбинации 11, 12 трактора и пресса-подборщика.
Это схематически проиллюстрировано на фиг. 2, на которой действующий в боковом направлении датчик 29а формирует треугольные поля обзора, соответственно, по левую и правую стороны от трактора 11.
Такая компоновка может быть осуществлена с использованием единственного действующего в боковом направлении датчика, который формирует соответственные левое и правое поля 31а, 31b обзора, как проиллюстрировано; или могут быть предусмотрены многочисленные датчики, обращенные соответственно, влево и вправо от трактора 11, с этой целью.
Поля обзора не обязательно должны принимать показанный двухмерный треугольный (или другой многоугольный) профиль и, взамен, могут иметь любой из ряда профилей и форм (в том числе, трехмерные формы, как упомянуто). Также не существенно, чтобы, когда два поля обзора формируются на противоположных сторонах от трактора 11, они имели одинаковую форму, хотя, в практических вариантах осуществления изобретения, это вероятно имеет место.
Независимо от перенятой формы поля обзора, однако, следует понимать, что поле(я) 31 обзора будет перемещаться по мере того, как трактор движется по полю, а потому, боковое поле(я) 31 обзора будет придерживаться траекторий движения, которые приближаются к траекториям движения, отслеживаемым трактором 11.
Действующий в боковом направлении датчик предпочтительно воплощен в виде камеры 29, 29а (или множества камер, как пояснено), установленной на тракторе 11. Это происходит потому, что желательно, чтобы поле обзора таких датчиков формировалось из места, приблизительно совпадающего с положением кабины оператора трактора 11. Однако, в других вариантах осуществления изобретения, один или более действующих в боковом направлении датчиков могут быть установлены на прессе-подборщике 12 или где-нибудь в другом месте на тракторе 11.
В дополнение к своим функциям при осуществлении рулевого управления трактором 11, а отсюда комбинацией 11, 12 трактора и пресса-подборщика, устройство управления и/или обработки может наносить на карту места, объекты, артефакты и условия, считанные одним или более действующих в боковом направлении датчиков. Пример по фиг. 2 показывает нанесение на карту мест в виде промежуточных точек 3 6, которые разнесены на равные или приблизительно равные интервалы вдоль валков, которые еще только должны быть подобраны и спрессованы в тюки прессом-подборщиком 12. Такие промежуточные точки, в одной из интерпретаций, могут рассматриваться в качестве точек на траектории движения, отслеживаемой боковым полем(ями) 31 обзора, а отсюда, в качестве приближений к траектории движения комбинации 11, 12 трактора и пресса-подборщика; хотя они равным образом могут интерпретироваться и использоваться иным образом, в том числе, например, чтобы предоставлять координаты, которые могут применяться для установления местоположений других признаков на поле; и/или содействовать оценке рабочей нагрузки и производительности комбинации трактора и пресса-подборщика.
Нанесение на карту мест, объектов, артефактов и условий, кроме того или в качестве альтернативы, может включать в себя запись данных о линиях 37, определенных валками до подбора и прессования в тюки. Такие данные, например, могут быть полезны при расположении комбинации 11, 12 трактора и пресса-подборщика в начале прохода по валку, а также по мере того, как комбинация 11, 12 осуществляет такой проход.
Как отмечено в материалах настоящей заявки, функциональные возможности нанесения на карту у устройства по изобретению могут использоваться многообразием дополнительных способов; и могут применяться для компенсации пониженной эффективности действующего в прямом направлении датчика, как пояснено в материалах настоящей заявки.
В более общем смысле, нанесение на карту данных дает возможность построения подробных карт поля во время процесса подбора и прессования в тюки. Они могут существовать в качестве значений данных в базе данных или подобном средстве хранения информации и/или в качестве видимых карт, в которых значения данных преобразованы в признаки, которые могут отображаться, печататься и интерпретироваться людьми и/или машинами. Более того, нанесенные на карту данные могут передаваться любой из широкого диапазона технологий, которые будут известны специалисту в области техники формирования карт на основе изображений.
Как подразумевается вышеизложенным, изобретение распространяется как на устройства, описанные и проиллюстрированные в материалах настоящей заявки; так и на способы использования таких устройств, как поясненные и определенные выше.
Устройства и способы изобретения в целом дают начало значительным усовершенствованиям устройства и работы комбинаций трактора и пресса-подборщика. Однако, как отмечено, способ также может применяться в отношении комбинаций других транспортных средств и прицепов, как упомянуто. Такие комбинации типично были бы опирающимися на землю, но (как также упомянуто), это не обязательно должно быть именно так.
Перечисление или обсуждение очевидно предшествующего опубликованного документа в данном описании изобретения не обязательно должно восприниматься в качестве подтверждения, что документ является частью уровня техники или представляет собой общедоступные сведения общего характера.
Предпочтения и возможные варианты для данного аспекта, признака или параметра изобретения, если контекст не указывает иное, следует рассматривать в качестве подлежащих раскрытию в комбинации с любыми и всеми предпочтениями и возможными вариантами для всех других аспектов, признаков и параметров изобретения.
Группа изобретений относится к сельскому хозяйству. Комбинация подвижного транспортного средства и прицепа включает в себя самоходное транспортное средство, имеющее один или более взаимодействующих с поверхностью элементов и рулевой механизм для управления направлением движения по меньшей мере одного упомянутого взаимодействующего с поверхностью элемента, с тем чтобы вызывать изменения направления движения транспортного средства, прицеп, который буксируется транспортным средством при движении транспортного средства вперед, и шарнирно присоединен к транспортному средству, один или более действующих в прямом направлении датчиков для считывания одного или более объектов и/или артефактов, и/или условий, расположенных впереди транспортного средства, один или более действующих в боковом направлении датчиков для считывания одного или более объектов и/или артефактов, и/или условий, которые при считывании расположены сбоку от транспортного средства и/или прицепа и устройство управления и/или обработки, которое действует в зависимости от по меньшей мере одного выходного сигнала одного или более действующих в боковом направлении датчиков, чтобы учитывать наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков. Один или более действующих в боковом направлении датчиков считывают один или более объектов и/или артефактов, расположенных сбоку от транспортного средства или прицепа, во время прохождения комбинации транспортного средства и прицепа вдоль первого валка на поле, встреченного комбинацией транспортного средства и прицепа. Устройство управления и/или обработки побуждает комбинацию транспортного средства и прицепа учитывать наличие одного или более объектов и/или артефактов, считанных одним или более действующих в боковом направлении датчиков, во время прохождения комбинации транспортного средства и прицепа вдоль встреченного впоследствии валка на поле. Способ управления комбинации транспортного средства и прицепа включает в себя этапы, на которых побуждают один или более действующих в боковом направлении датчиков считывать один или более объектов и/или артефактов, и/или условий, которые при считывании расположены сбоку от транспортного средства и/или прицепа; побуждают устройство управления и/или обработки действовать в зависимости от по меньшей мере одного выходного сигнала одного или более действующих в боковом направлении датчиков, чтобы учитывать наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков, приводят в действие один или более действующих в боковом направлении датчиков, чтобы считывали один или более объектов и/или артефактов, расположенных сбоку от транспортного средства или прицепа, во время прохождения комбинации транспортного средства и прицепа вдоль первого валка на поле, встреченного комбинацией транспортного средства и прицепа; и побуждают устройство управления и/или обработки приводить в действие рулевой механизм для управления направлением движения комбинации транспортного средства и прицепа, чтобы учитывать наличие одного или более объектов и/или артефактов, считанных одним или более действующих в боковом направлении датчиков, во время прохождения комбинации транспортного средства и прицепа вдоль встреченного впоследствии валка на поле. Обеспечивается улучшение управления транспортным средством с прицепом. 2 н. и 12 з.п. ф-лы, 2 ил.
1. Комбинация подвижного транспортного средства и прицепа, включающая в себя (а) самоходное транспортное средство, имеющее один или более взаимодействующих с поверхностью элементов и рулевой механизм для управления направлением движения по меньшей мере одного упомянутого взаимодействующего с поверхностью элемента, с тем чтобы вызывать изменения направления движения транспортного средства; (b) прицеп, который буксируется транспортным средством при движении транспортного средства вперед, и шарнирно присоединен к транспортному средству; (с) один или более действующих в прямом направлении датчиков для считывания одного или более объектов и/или артефактов, и/или условий, расположенных впереди транспортного средства; (d) один или более действующих в боковом направлении датчиков для считывания одного или более объектов и/или артефактов, и/или условий, которые при считывании расположены сбоку от транспортного средства и/или прицепа; и (е) устройство управления и/или обработки, которое действует в зависимости от по меньшей мере одного выходного сигнала одного или более действующих в боковом направлении датчиков, чтобы учитывать наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков, при этом один или более действующих в боковом направлении датчиков считывают один или более объектов и/или артефактов, расположенных сбоку от транспортного средства или прицепа, во время прохождения комбинации транспортного средства и прицепа вдоль первого валка на поле, встреченного комбинацией транспортного средства и прицепа; при этом устройство управления и/или обработки побуждает комбинацию транспортного средства и прицепа учитывать наличие одного или более объектов и/или артефактов, считанных одним или более действующих в боковом направлении датчиков, во время прохождения комбинации транспортного средства и прицепа вдоль встреченного впоследствии валка на поле.
2. Комбинация транспортного средства и прицепа по п. 1, в которой один или более действующих в боковом направлении датчиков считывают поле обзора, которое является по меньшей мере двухмерным многоугольником, расположенным сбоку от транспортного средства и/или прицепа, расположение многоугольника перемещается при движении комбинации транспортного средства и прицепа, чтобы определять траекторию поля обзора, приближающуюся к траектории комбинации транспортного средства и прицепа.
3. Комбинация транспортного средства и прицепа по п. 1 или 2, в которой по меньшей мере один упомянутый действующий в боковом направлении датчик является или включает в себя оптическую или формирующую облако точек камеру.
4. Комбинация транспортного средства и прицепа по любому предыдущему пункту, в которой устройство управления и/или обработки присоединено, чтобы приводить в действие рулевой механизм транспортного средства, так чтобы комбинация транспортного средства и прицепа следовала траектории движения, которая учитывает наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков.
5. Комбинация транспортного средства и прицепа по п. 4, в которой устройство управления и/или обработки приводит в действие рулевой механизм, чтобы управлять направлением движения комбинации транспортного средства и прицепа, так чтобы избегать одного или более объектов и/или артефактов и/или условий, считанных одним или более действующих в боковом направлении датчиков.
6. Комбинация транспортного средства и прицепа по п. 4 или 5, в которой устройство управления и/или обработки приводит в действие рулевой механизм, чтобы управлять направлением движения комбинации транспортного средства и прицепа, так чтобы оптимизировать расположение транспортного средства и/или прицепа относительно одного или более объектов и/или артефактов и/или условий, считанных одним или более действующих в боковом направлении датчиков.
7. Комбинация транспортного средства и прицепа по любому предыдущему пункту, в которой устройство управления и/или обработки наносит на карту местоположения объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков.
8. Комбинация транспортного средства и прицепа по п. 7, в которой устройство управления и/или обработки наносит на карту местоположение одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков, которые не считываются одним или более действующих в прямом направлении датчиков.
9. Комбинация транспортного средства и прицепа по п. 2 или любому предыдущему пункту, зависимому от п. 2, в которой устройство управления и/или обработки наносит на карту одну или более промежуточных точек, приближающихся к траектории комбинации трактора и пресс-подборщика, в поле обзора траектории, считываемом действующим в боковом направлении датчиком.
10. Способ управления комбинации транспортного средства и прицепа по любому предыдущему пункту, включающий в себя этапы, на которых побуждают один или более действующих в боковом направлении датчиков считывать один или более объектов и/или артефактов, и/или условий, которые при считывании расположены сбоку от транспортного средства и/или прицепа; побуждают устройство управления и/или обработки действовать в зависимости от по меньшей мере одного выходного сигнала одного или более действующих в боковом направлении датчиков, чтобы учитывать наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков, приводят в действие один или более действующих в боковом направлении датчиков, чтобы считывали один или более объектов и/или артефактов, расположенных сбоку от транспортного средства или прицепа, во время прохождения комбинации транспортного средства и прицепа вдоль первого валка на поле, встреченного комбинацией транспортного средства и прицепа; и побуждают устройство управления и/или обработки приводить в действие рулевой механизм для управления направлением движения комбинации транспортного средства и прицепа, чтобы учитывать наличие одного или более объектов и/или артефактов, считанных одним или более действующих в боковом направлении датчиков, во время прохождения комбинации транспортного средства и прицепа вдоль встреченного впоследствии валка на поле.
11. Способ по п. 10, включающий в себя этап, на котором побуждают устройство управления и/или обработки приводить в действие рулевой механизм транспортного средства, так чтобы комбинация транспортного средства и прицепа следовала траектории движения, которая учитывает наличие одного или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков.
12. Способ по п. 11, включающий в себя этап, на котором побуждают устройство управления и/или обработки приводить в действие рулевой механизм, так чтобы комбинация транспортного средства и прицепа избегала один или более объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков.
13. Способ по любому из пп. 10-12, включающий в себя этап, на которых побуждают устройство управления и/или обработки наносить на карту местоположения объектов и/или артефактов, и/или условий, считанных одним или более действующих в боковом направлении датчиков, и/или одну или более промежуточных точек.
14. Способ по любому из пп. 10-13, включающий в себя этапы, на которых побуждают устройство управления и/или обработки оценивать одно или более из (i) абсолютного количества не спрессованных в тюки продуктов жатвы в валке; и/или (ii) абсолютного количества не спрессованных продуктов в множестве валков; и/или (iii) удельного количества не спрессованных продуктов жатвы на единицу длины одного или более валков, и рассчитывают один или более параметров из них.
| Способ получения железа из оолитов бурожелезняковой руды и устройство для его реализации | 2020 |
|
RU2743132C2 |
| СТОЙКА ДЛЯ ПИТЕРБАСКЕТА | 2012 |
|
RU2517543C1 |
| US 2009204281 A1, 13.08.2009 | |||
| US 4555725 A, 26.11.1985 | |||
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНОЙ, УБОРОЧНАЯ МАШИНА И МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2004 |
|
RU2361381C2 |

