уровень техники
Известно, что пресс–подборщики формируют и размещают тюки убранной массы на сельскохозяйственном поле. Положение тюков может определяться моментами времени, в которое пресс–подборщик собрал достаточно убранной массы, чтобы сформировать готовый тюк. После этого, одно или более других сельскохозяйственных транспортных средств могут двигаться по полю, чтобы подбирать тюки и увозить их с поля, например, для хранения.
сущностЬ изобретения
В соответствии с первым аспектом изобретения, обеспечена система, содержащая:
контроллер, сконфигурированный, чтобы:
принимать данные местоположения тюка, характерные для местоположения множества тюков в поле;
принимать данные свойства тюка, характерные для одного или более физических свойств каждого из множества тюков; и
определять данные подбора тюка на основе данных местоположения тюка и данных свойства тюка, причем данные подбора тюка связаны с операцией для подбора тюков с поля.
Данные свойства тюка могут содержать одно или более из: данных измерения тюка, которые являются характерными для физического размера и/или формы тюка; данных плотности тюка, которые являются характерными для плотности убранной массы в тюке; данных веса тюка, которые являются характерными для веса тюка; данных качества тюка, которые являются характерными для оценки качества тюка; данных влажности тюка, которые являются характерными для уровня влажности тюка; данных типа убранной массы (сельскохозяйственной культуры) тюка, которые являются характерными для типа сельскохозяйственной культуры, которая включена в тюк; данных температуры тюка, которые являются характерными для температуры тюка; данных длины стеблей тюка, которые являются характерными для длины стеблей сельскохозяйственной культуры в тюке; временных данных тюка, которые являются характерными для одного или обоих из начальной и конечной временной метки создания тюка; и данных производства тюка, которые являются характерными для одного или более параметров производства, используемых для производства тюка.
Данные подбора тюка могут содержать данные плана маршрута подбора, которые являются характерными для порядка, в котором следует подбирать тюки. Данные плана маршрута подбора могут содержать упорядоченную последовательность местоположений подбора тюков, которые соответствуют местоположениям множества тюков на поле. Контроллер может быть выполнен с возможностью определения упорядоченной последовательности на основе данных свойства тюка.
Данные свойства тюка могут содержать данные качества тюка. Контроллер может быть выполнен с возможностью определения упорядоченной последовательности на основе списка порядка тюков от высокого качества до низкого качества.
Данные подбора тюка могут содержать данные расположения тюков, которые являются характерными для того, как должны быть расположены тюки, когда они подбираются. Контроллер может быть выполнен с возможностью определения данных расположения тюков, так что тюки с связанными данными свойства тюка размещаются смежно друг с другом.
Данные расположения тюков могут содержать: для каждого из множества тюков: данные положения на прицепе, которые являются характерными для положения для тюка на прицепе. Контроллер может быть выполнен с возможностью определения данных положения на прицепе, так что тюки с заданными свойствами помещаются в заданные положения на прицепе.
Контроллер может быть выполнен с возможностью применения одного или более критериев положения на прицепе к данным свойства тюка, чтобы определить данные расположения тюков.
Может быть обеспечена компьютерная программа, которая, при запуске на компьютере, побуждает компьютер конфигурировать любое устройство, включая контроллер, процессор, машину, транспортное средства или устройство, раскрытое в настоящем документе, или выполнять любой способ, описанный в настоящем документе. Компьютерная программа может быть программной реализацией, и компьютер может рассматриваться как любое соответствующее аппаратное средство, включающее в себя цифровой сигнальный процессор, микроконтроллер и реализацию в постоянной памяти (ROM), стираемой программируемой постоянной памяти (EPROM) или электронно–стираемой программируемой постоянной памяти (EEPROM), в качестве неограничивающих примеров.
Компьютерная программа может быть обеспечена на считываемом компьютером носителе, который может представлять собой физический считываемый компьютером носитель, такой как диск или устройство памяти, или может быть воплощен как переходный сигнал. Такой переходный сигнал может представлять собой сетевую загрузку, в том числе интернет–загрузку.
Краткое описание чертежей
Варианты осуществления настоящего изобретения будут описаны далее в качестве примера и со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 показывает пример сельскохозяйственного поля;
Фиг. 2 схематично показывает контроллер для определения данных подбора тюка, которые связаны с операцией для подбора тюков с поля;
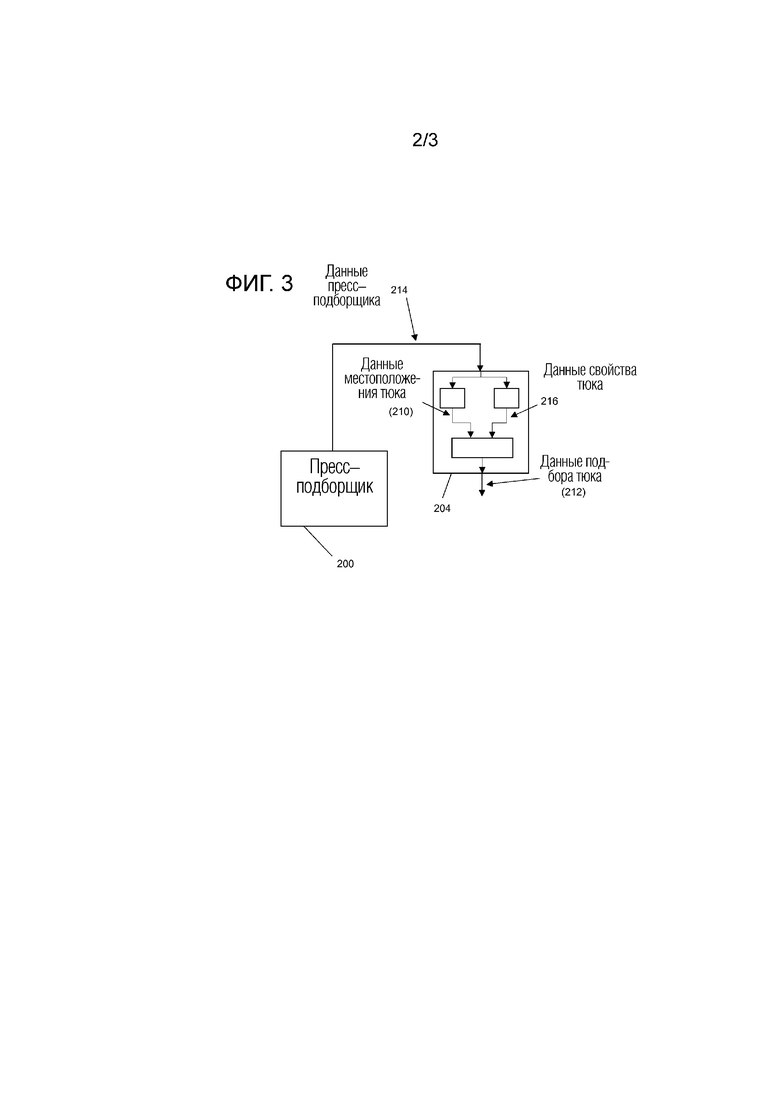
Фиг. 3 схематично показывает другой контроллер для определения данных подбора тюка; и
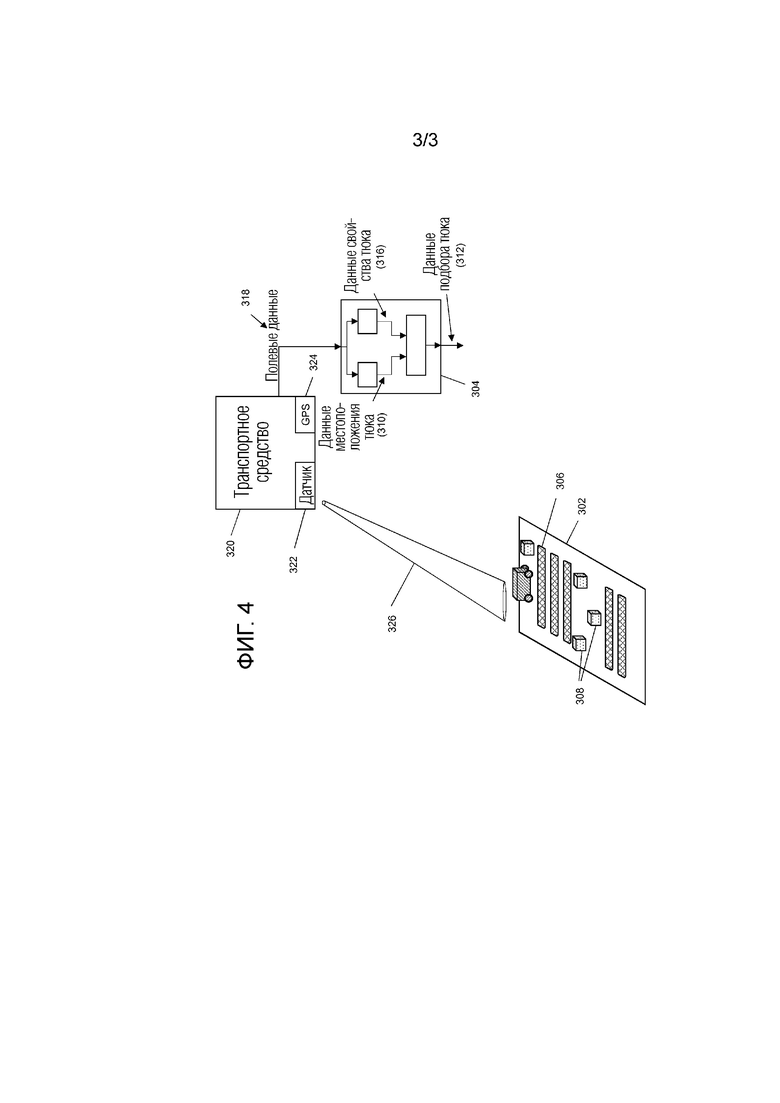
Фиг. 4 схематично показывает еще один контроллер для определения данных подбора тюка.
Подробное описание ИЗОБРЕТЕНИЯ
Фиг. 2 схематично показывает систему, которая включает в себя контроллер 104 для определения данных 112 подбора тюка. Данные 112 подбора тюка связаны с операцией для подбора/сбора тюков 108 с сельскохозяйственного поля 102, как показано на фиг. 1. Как будет обсуждено подробно ниже, контроллер 104 может быть расположен на пресс–подборщике 100 или удаленно от пресс–подборщика 100. Например, функциональность контроллера 104 может выполняться на удаленном сервере, таком как сервер “в облаке”.
Поле 102 включает в себя ряды убранной массы, которые могут представлять собой сено, солому или подобные продукты, которые были оставлены в поле 102 в форме валков 106. Валки 106 представляют собой удлиненные ряды соответствующих продуктов, которые насыпаны в кучу в центре поперечника и выравниваются на соответствующих краях поперечника. Как правило, поле 102, после уборки урожая, содержит много по существу параллельных друг другу валков 106, как показано на фиг. 1. Эти валки отстоят друг от друга на практически постоянные промежутки. Убранная масса в валках 106 может быть подобрана пресс–подборщиком 100, а затем размещена на поле 102 как тюки 108. Поле 102, которое показано на фиг. 1, было частично обработано, при этом оно включает в себя как ряды валков 106 для прессования в тюки, так и готовые тюки 108. Должно быть понятно, что более одного пресс–подборщика 100 может работать на одном и том же поле 102 одновременно.
Контроллер 104 принимает данные 110 местоположения тюка, которые являются характерными для местоположения множества тюков 108 на сельскохозяйственном поле 102. Данные 110 местоположения тюка могут включать в себя множество наборов координат тюка, таких как координаты GPS, с идентификатором тюка, связанным с каждым набором координат тюка. Контроллер 104 также принимает данные 116 свойства тюка. Данные 116 свойства тюка могут включать в себя одно или более значений свойства тюка, связанных с каждым идентификатором тюка. Альтернативно, данные 110 местоположения тюка и данные 116 свойства тюка могут обеспечиваться вместе, так что отдельный идентификатор тюка не требуется.
Значения свойства тюка являются характерными для физического свойства тюка 108. Как будет обсуждено ниже, примеры таких свойств включают в себя: размер, вес, плотность и влажность. Контроллер 104 определяет данные 112 подбора тюка на основе данных 110 местоположения тюка и данных 116 свойства тюка. Данные 112 подбора тюка связаны с операцией для подбора тюков 108 с поля 102. Как будет обсуждено ниже, данные подбора тюка могут включать в себя данные плана маршрута подбора (которые являются характерными для порядка, в котором следует подбирать тюки) и/или данные расположения тюков (которые являются характерными для того, как должны быть расположены тюки, когда они подбираются, например как они расположены на прицепе).
Предпочтительно, контроллер 104 может использовать данные 116 свойства тюка, так что операция для подбора тюков 108 может выполняться улучшенным способом, например с точки зрения одного или более из эффективности, безопасности и сохранения качества тюков.
Примеры различных типов данных свойства тюка включают в себя:
– данные измерения тюка, которые являются характерными для физического размера и/или формы тюка 108. Данные измерения тюка могут включать в себя одно или более из: данных длины тюка, данных ширины тюка, данных высоты тюка. Каждое из этих свойств может быть обеспечено как среднее, максимальное или минимальное значение (такое как максимальная длина тюка). Данные измерения тюка могут также быть реализованы как данные объема тюка или данные площади поперечного сечения тюка. Данные площади поперечного сечения тюка могут быть получены вдоль поперечного сечения, которое параллельно одному или нескольким из длины, высоты или глубины тюка 108.
– данные плотности тюка, которые являются характерными для плотности убранной массы в тюке 108.
– данные веса тюка, которые являются характерными для веса тюка 108.
– данные влажности тюка, которые являются характерными для уровня влажности тюка 108.
– данные типа сельскохозяйственной культуры тюка, которые являются характерными для типа сельскохозяйственной культуры, которая включена в тюк 108.
– данные температуры тюка, которые являются характерными для температуры тюка 108.
– данные длины стеблей тюка, которые являются характерными для длины стеблей сельскохозяйственной культуры в тюке 108.
– временные данные тюка, которые являются характерными для одной или обеих из начальной и конечной временной метки создания тюка 108.
– данные производства тюка, которые являются характерными для одного или более параметров производства, используемых для производства тюка 108, таких как номер шасси пресс–подборщика, настройка плотности, число слоев, скорость движения, находятся ли ножи в зацеплении, и т.д.
– данные качества тюка, которые являются характерными для показателя качества тюка 108. В некоторых примерах, контроллер 104 может сравнивать: (i) значения для одних или несколькими из данных свойства тюка, раскрытых здесь; с (ii) одним или несколькими целевыми значениями/порогами параметров, и затем контроллер 104 может устанавливать данные качества тюка на основе результатов сравнения. В некоторых примерах, пороги параметров могут зависеть от сельскохозяйственной культуры – например, может быть желательно, чтобы увлажненность тюков пшеничной соломы была гораздо меньше, чем увлажненность тюков травы. В некоторых примерах, целевые значения/пороги параметров могут устанавливаться на основе пользовательского ввода, так что они зависят от конкретных предпочтений пользователя. Например, пользователю желательны тюки весом 450 кг и длиной 2,4 м, тогда они могут использоваться в качестве целевых значений. Пользователь может обеспечивать ввод, который является характерным для целевого значения или целевого диапазона для одного или более из: веса, длины и увлажненности. Контроллер 104 может затем определять оценку качества на основе отклонения от этих или любых других параметров.
Должно быть понятно, что контроллер 104 может вычислять некоторые из приведенных выше типов данных свойства тюка на основе других типов принятых данных свойства тюка. Например, контроллер 104 может разделить данные веса тюка на данные объема тюка, чтобы определить данные плотности тюка.
В некоторых примерах, данные 112 подбора тюка включают в себя данные плана маршрута подбора, которые являются характерными для порядка, в котором тюки 108 должны подбираться. Таким образом, данные плана маршрута подбора могут включать в себя упорядоченную последовательность местоположений подбора тюков, которые соответствуют местоположениям множества тюков в поле. То есть, контроллер 104 может составлять упорядоченный список координат тюка, которые принимаются в качестве данных местоположения тюка, на основе данных 116 свойства тюка.
При необходимости, контроллер 104 может определять упорядоченную последовательность на основе данных измерения тюка для каждого из тюков 108. Например, упорядоченная последовательность может включать в себя местоположения подбора тюков для тюков 108 с увеличивающимся или уменьшающимся размером. В некоторых применениях, может быть предпочтительным загружать большие тюки перед меньшими тюками.
При необходимости, контроллер 104 может определять упорядоченную последовательность на основе данных плотности тюка/данных веса тюка для каждого из тюков 108. Например, упорядоченная последовательность может включать в себя местоположения подбора тюков для тюков 108 с уменьшающейся плотностью/весом. В некоторых применениях, может быть предпочтительным загружать более плотные/более тяжелые тюки перед менее плотными/более легкими тюками, особенно если тюки должны укладываться сверху друг на друга на прицепе, чтобы уменьшить вероятность того, что более плотный/более тяжелый тюк будет помещен сверху на менее плотный/более легкий тюк и может повредить менее плотный/более легкий тюк.
При необходимости, контроллер 104 может определять упорядоченную последовательность на основе данных влажности тюка для каждого из тюков 108. Например, упорядоченная последовательность может включать в себя местоположения подбора тюков для увеличивающихся или уменьшающихся уровней влажности тюков 108. В некоторых примерах, упорядоченная последовательность может включать в себя местоположения подбора тюков для увеличивающихся уровней влажности тюков 108, на основе того, что самые сухие тюки, вероятно, будут иметь самое высокое качество. Например, если начинает идти дождь, то лучшие тюки уже были помещены в ‘безопасное место’.
При необходимости, контроллер 104 может определять упорядоченную последовательность на основе данных типа сельскохозяйственной культуры тюка для каждого из тюков 108. Например, упорядоченная последовательность может включать в себя местоположения подбора тюков, так что все тюки 108 с одним и тем же типом сельскохозяйственной культуры подбираются в последовательном порядке. Таким образом, тюки, имеющие первый тип сельскохозяйственной культуры, подбираются перед тюками, имеющими второй тип сельскохозяйственной культуры, и т.д.
При необходимости, контроллер 104 может определять упорядоченную последовательность на основе данных качества тюка для каждого из тюков 108. Например, упорядоченная последовательность может включать в себя местоположения подбора тюков для повышающихся оценок качества от низких к высоким или снижающихся оценок качества от высоких к низким. В некоторых применениях, может быть предпочтительным сначала подобрать тюки 108 высокого качества по причинам, изложенным выше.
Должно быть понятно, что в примерах, где данные 116 свойства тюка включают в себя более одного типа данных свойства, контроллер 104 может применять алгоритм к различным значениям свойства тюка и/или разным типам данных свойства тюка, чтобы определить упорядоченную последовательность. Это может предусматривать применение заданной иерархии к разным типам данных свойств, например, чтобы упорядочить местоположения подбора на основе типа сельскохозяйственной культуры, а затем оценки качества. В некоторых применениях, определение упорядоченной последовательности может предусматривать применение заданных весовых значений к разным типам данных свойств/значениям данных 116 свойства тюка. Более того, как будет обсуждено ниже, один или более других типов данных могут учитываться контроллером 104 при определении упорядоченной последовательности, например, потребление топлива, требуемое для передвижения между местоположениями подбора в упорядоченной последовательности.
В дополнение к определению данных плана маршрута подбора на основе данных 116 свойства тюка, как обсуждено выше, контроллер может также определять данные плана маршрута подбора на основе одного или более других типов данных, например, на основе потребления топлива, требуемого для передвижения между местоположениями подбора в примере упорядоченной последовательности, и/или времени, которое потребуется для следования маршруту. Таким образом, контроллер 104 может определять маршрут таким образом, что он обеспечивает одно или более преимуществ, например:
(i) эффективная загрузка/подбор, например, низкое общее потребление топлива транспортных средств, которые используются, чтобы подбирать тюки 108; и
(ii) эффективная загрузка с точки зрения времени, требуемого для сбора всех тюков 108 с поля 102.
Данные 112 плана маршрута подбора могут быть характерными для маршрута, подлежащего приятию одним или несколькими сельскохозяйственными транспортными средствами для сбора тюков и их транспортировки с поля 102, например, первым трактором, который должен тянуть прицеп для приема тюков и их транспортировки с поля 102, и вторым трактором с погрузчиком/шипами для подбора и перемещения тюка 108 на прицеп. Данные 112 плана маршрута подбора могут обеспечиваться как инструкции для операторов тракторов, чтобы следовать ему, когда они находятся в поле 102, собирая тюки. При необходимости, контроллер, связанный с первым и вторым тракторами, может обеспечивать инструкции в реальном времени операторам тракторов на основе их текущих и/или прошлых местоположений, так что, путем следования инструкциям в реальном времени, они могут следовать маршруту, чтобы подбирать тюки 108 в желательном порядке.
В примерах, где оператор ведет сельскохозяйственное транспортное средство, чтобы следовать маршруту, который представлен данными 112 плана маршрута подбора, дисплей или другое устройство вывода может использоваться, чтобы обеспечивать инструкции оператору, которые основаны на данных 112 плана маршрута подбора. Например, контроллер 104 может генерировать и отображать дополненную реальность, чтобы указывать, какой тюк следует подобрать следующим.
Маршрут может определяться на основе множества стратегий, таких как:
– транспортное средство погрузчика и транспортное средство прицепа стоят вместе.
– транспортное средство погрузчика тянет прицеп и оставляет его в определенных положениях.
– транспортное средство погрузчика и транспортное средство прицепа, которые останавливаются в определенных местоположениях.
– транспортное средство погрузчика собирает тюки в определенных буферных местоположениях, затем загружает их на прицеп, когда он приезжает.
– любое из приведенного выше с множеством погрузчиков и/или прицепов.
– любое из приведенного выше, где погрузчик подбирает множество тюков, уложенных друг на друга перед помещением их в прицеп или буфер.
В таких примерах, может планироваться/выбираться маршрут, который приводит к хорошей функции затрат, которая применяется для оценивания разных маршрутов подбора. Любой известный алгоритм оптимизации может использоваться или адаптироваться в этом отношении. Например, если пройденное расстояние должно быть минимизировано, когда погрузчик и прицеп движутся вместе, то контроллер может применять ‘проблему кратчайшего пути’.
В некоторых примерах, контроллер 104 может определять инструкции управления транспортным средством для тракторов (или любого другого сельскохозяйственного транспортного средства/погрузчика) на основе данных 112 плана маршрута подбора. Инструкции управления транспортным средством могут содержать инструкции управления направлением транспортного средства для автоматического управления направлением движения тракторов. Инструкции управления транспортным средством могут дополнительно содержать инструкции скорости на маршруте для автоматического управления скоростью тракторов в местоположениях вдоль маршрута. Таким образом, тракторы могут автономно управляться, так что они следуют конкретному маршруту через сельскохозяйственное поле, чтобы подбирать тюки 108 с поля 102.
В некоторых примерах, данные 112 подбора тюка могут включать в себя данные расположения тюков, которые являются характерными для того, как должны быть расположены тюки, когда они подбираются.
Например, трактор (или другое сельскохозяйственное транспортное средство) может подбирать тюки 108 и помещать их на прицеп, так что они могут транспортироваться с поля 102. Данные расположения тюков могут включать в себя данные положения на прицепе, которые являются характерными для положения для каждого тюка 108 на прицепе. Положение может представлять собой идентификатор ряда, столбца и/или положения по высоте на прицепе, если тюки должны быть расположены таким образом. Положение может представлять собой конкретный идентификатор положения тюка на прицепе. Положение может представлять собой заданное положение со ссылкой на признаки прицепа, такие как: рядом с краем прицепа, в центральной зоне прицепа, в передней зоне прицепа, в задней зоне прицепа, по оси прицепа и не по оси прицепа.
Контроллер 104 может определять данные положения на прицепе, так что тюки 108 с заданными свойствами помещаются в заданные положения на прицепе.
Данные расположения тюков/данные положения на прицепе могут определяться так, что тюки с связанными данными свойств тюка помещаются в заданном отношении друг с другом, например, смежно друг с другом. Дополнительные примерные подробности обеспечены ниже.
Контроллер 104 может быть выполнен с возможностью применения одного или более критериев положения на прицепе к данным 116 свойств тюка, чтобы определить данные расположения тюков.
При необходимости, применение критериев положения на прицепе может включать в себя определение заданного числа тюков, которые имеют значение свойства самого высокого/самого низкого тюка, и определение данных расположения тюков, которые соответствуют тюкам, располагаемым в заданном местоположении на прицепе.
Например, если ожидается, что четыре тюка 108 будут помещены бок о бок поперек ширины прицепа, то критерии положения на прицепе могут определять четыре самых тяжелых тюка (на основе данных веса тюка) в поле, и данные расположения тюков могут быть характерными для этих четырех самых тяжелых тюков, располагаемых выше оси прицепа.
В качестве другого примера, критерии положения на прицепе могут включать в себя определение заданного числа тюков, которые имеют данные наивысшего качества тюка, и определение данных положения на прицепе, которые являются характерными для тюков, находящихся дальше всего от положения загрузки тюка на прицеп. Таким образом, оператор для загрузки тюков может загружать тюки с самым высоким качеством первыми.
При необходимости, применение критериев положения на прицепе может включать в себя определение тюков, которые имеют значение свойства тюков, которое удовлетворяет пороговому значению тюка. Пороговое значение тюка может представлять собой максимальное значение, минимальное значение или диапазон значений. Контроллер 104 может затем определять данные расположения тюков, которые соответствуют тюкам, помещаемым в заданное положение на прицепе.
Например, применение критериев положения на прицепе может включать в себя определение тюков, которые имеют данные веса тюка, которые больше, чем пороговое значение веса тюков, и определение данных расположения тюков, которые соответствуют тюкам, помещаемым в заданное положение на прицепе, такое как по оси прицепа или вблизи оси прицепа.
В качестве другого примера, применение критериев положения на прицепе может включать в себя определение тюков, которые имеют данные веса тюка, которые больше, чем пороговое значение веса тюка, и затем помещение этих тюков на минимальных расстояниях от положения на прицепе, которое соответствует оси.
В качестве другого примера, применение критериев положения на прицепе может включать в себя обработку данных влажности тюка, так что тюки с аналогичными уровнями влажности помещаются смежно друг с другом на прицепе. Например, все тюки с уровнем влажности, который находится в заданном диапазоне уровней влажности, могут помещаться смежно друг с другом. Это может приводить к тому, что самые влажные тюки помещаются вместе, и поэтому может уменьшать вероятность того, что ‘влажные’ тюки передадут влажность другим ‘сухим’ тюкам. Также, путем размещения тюков с аналогичными уровнями влажности рядом друг с другом, может быть проще фильтровать тюки с конкретными уровнями влажности, когда они прибывают в местоположение хранения.
В некоторых примерах, контроллер 104 может определять данные плана маршрута подбора на основе данных расположения тюков. Например, контроллер 104 может определять компоновку тюков на прицепе, и затем контроллер 104 может определять упорядоченную последовательность для подбора тюков 108, которая согласуется с компоновкой. Это может предусматривать подбор тюков, которые должны размещаться в наименее доступное положение на прицепе, перед тюками, которые должны размещаться в более доступном положении. В примерах, где тюки будут уложены сверху друг на друга на прицепе (в этом случае данные расположения тюков могут представлять трехмерную компоновку тюков), контроллер 104 может определять данные плана маршрута подбора так, что тюки подбираются на основе слоя, в котором они должны быть размещены, снизу вверх, или по меньшей мере так, что любые нижние тюки, которые должны поддерживать верхний тюк, загружаются первыми.
В других примерах, данные расположения тюков могут быть представлены оператору сельскохозяйственного транспортного средства (такого как погрузчик) при сборе тюков 108 с поля 102, так что оператор может располагать тюки 108 желательным образом. При необходимости, контроллер, связанный с сельскохозяйственным транспортным средством, может предоставлять инструкции в реальном времени оператору сельскохозяйственного транспортного средства на основе его текущих и/или прошлых местоположений, так что, путем следования инструкциям в реальном времени, он может группировать тюки 108 предпочтительным образом.
Фиг. 3 схематично показывает другую систему для определения данных 212 подбора тюка. Система включает в себя контроллер 204 и пресс–подборщик 200. Пресс–подборщик 200 обеспечивает данные 214 пресс–подборщика на контроллер 204. Как будет обсуждено ниже, контроллер 204 может затем определять данные 210 местоположения тюка и/или данные 216 свойства тюка на основе данных 214 пресс–подборщика. Будет понятно, что контроллер 204 может или не может быть расположен локально с пресс–подборщиком 200. В некоторых примерах, пресс–подборщик 200 может обеспечивать данные 214 пресс–подборщика на удаленный контроллер 204 посредством системы передачи и обработки информации и может использовать интернет–соединение. Альтернативно, контроллер 204 может соединяться посредством проводной связи с необходимыми компонентами пресс–подборщика 200.
В примерах, где множество пресс–подборщиков обрабатывают поле, каждый из пресс–подборщиков может обеспечивать данные пресс–подборщика на контроллер 204. Например, связь между транспортными средствами может использоваться, если существует более одного пресс–подборщика, работающего на поле. Эта связь может быть прямой или опосредованной, например, через “облако”.
Как будет понятно из последующего описания, пресс–подборщик 200 может отправлять одно или более из оцененного местоположения, ориентации, размеров и времени сброса тюков, которые были сброшены.
Данные 214 пресс–подборщика могут включать в себя данные местоположения пресс–подборщика, характерные для местоположения пресс–подборщика 200 в моменты времени, когда пресс–подборщик 200 размещает тюки в поле. Такая информация может сохраняться и становиться доступной каждый раз, когда пресс–подборщик 200 размещает тюк. Контроллер 204 может определять данные 210 местоположения тюка как один набор координат для каждого тюка. Один набор координат может быть характерным, например, для местоположения ожидаемого центра тюка и может вычисляться контроллером 204, применяющим смещение к местоположению пресс–подборщика 200 (как определено из данных местоположения пресс–подборщика), когда тюк был сброшен. Смещение может указывать расстояние между: (i) модулем определения местоположения (таким как приемник GPS), который установлен на пресс–подборщике 200; и (ii) точкой выхода пресс–подборщика 200, из которой сбрасывается тюк. Контроллер 204 может применять смещение к местоположению пресс–подборщика 200 в направлении, противоположном направлению движения пресс–подборщика 200, когда тюк был сброшен. Контроллер может также использовать путевую скорость пресс–подборщика, чтобы корректировать местоположение сброса тюка.
В некоторых примерах, данные 214 пресс–подборщика могут включать в себя данные измерения тюка, которые представляют собой пример данных 216 свойства тюка, которые являются характерными для размера и/или формы тюка. Данные измерения тюка, такие как данные площади поперечного сечения тюка, могут быть фиксированными/жестко кодированными для конкретного пресс–подборщика или они могут определяться с использованием одного или более датчиков, которые измеряют размеры каждого отдельного формируемого тюка. В таких примерах, контроллер 204 может определять данные 210 местоположения тюка как множество наборов координат для каждого тюка. Множество наборов координат могут быть характерными, например, для местоположений одного или более углов тюка и могут быть достаточными, чтобы использоваться совместно для определения периметра двумерного следа тюка (например, при наблюдении сверху) или для определения периметра трехмерного объема тюка.
Контроллер 204 может определять множество наборов координат путем применения смещений к местоположению пресс–подборщика (данным местоположения пресс–подборщика), когда тюк был сброшен. Контроллер 204 может определять смещения на основе данных измерения тюка. При необходимости, контроллер 204 может также определять смещения на основе расстояния между: (i) модулем определения местоположения, который установлен на пресс–подборщике 200; и (ii) точкой выхода пресс–подборщика 200, из которой сбрасывается тюк.
В некоторых примерах, данные 214 пресс–подборщика могут включать в себя данные длины колеса (данные зубчатого колеса в камере прессования тюка пресс–подборщика 200). Данные длины колеса являются характерными для толщины слоя убранной массы в тюке. Контроллер 204 может использовать данные длины колеса, чтобы определять данные измерения тюка.
В некоторых примерах, данные 214 пресс–подборщика могут включать в себя данные наполнителя, которые являются характерными для числа слоев убранной массы, которые включены в тюк. Датчик срабатывания наполнителя на пресс–подборщике 200 может обеспечивать данные наполнителя. Контроллер 204 может использовать данные наполнителя, чтобы определять данные измерения тюка.
В некоторых примерах, данные 214 пресс–подборщика могут включать в себя данные узловязателя, которые представляют моменты времени, когда пресс–подборщик завершил тюк и начал формировать новый тюк. Сигнал узловязателя указывает начало и конец прессования тюка. Таким образом, путем суммирования значений смещения, которые измеряются зубчатыми колесом между 2 сигналами узловязателя, контроллер 204 может определять полную длину тюка. Также, когда конец тюка стянут узлом, контроллер 204 может определять, где тюк находится в камере тюка, и его размеры. Поэтому, контроллер 204 может начать отслеживать движение этого тюка в камере тюка. Контроллер 204 может также определить, когда тюк покидает камеру тюка, и если контроллер 204 также принимает сигнал сброса тюка, контроллер 204 может определить, что это тюк, который падает из машины. Таким образом, данные узловязателя могут использоваться, чтобы определять данные измерения тюка и/или данные местоположения тюка.
В некоторых примерах, данные 214 пресс–подборщика могут включать в себя данные веса тюка, которые получают датчиком веса (не показан), который измеряет вес тюка, когда он сформирован. Например, датчик веса может быть связан с лотком прессовальной камеры пресс–подборщика 200.
В некоторых примерах, данные 214 пресс–подборщика могут включать в себя данные плотности тюка, которые основаны на настройке плотности, принятой от пресс–подборщика 200. Настройка плотности может устанавливаться оператором пресс–подборщика для управления предполагаемой плотностью сельскохозяйственной культуры в тюке 108. Альтернативно, контроллер 204 может делить данные веса тюка на данные объема тюка, которые могут определяться из данных 214 пресс–подборщика.
В некоторых примерах, данные 214 пресс–подборщика могут включать в себя данные типа сельскохозяйственной культуры тюка. Например, пресс–подборщик 200 может иметь пользовательский интерфейс, который оператор пресс–подборщика 200 может использовать, чтобы выбрать тип сельскохозяйственной культуры, которая прессуется в тюки.
В некоторых примерах, данные 214 пресс–подборщика могут включать в себя данные влажности тюка, которые получают комплектом датчиков увлажненности, связанным с пресс–подборщиком 200.
Контроллер 204 может затем определять данные 212 подбора тюка на основе данных 210 местоположения тюка и/или данных 216 свойства тюка, которые были вычислены с использованием данных 214 пресс–подборщика.
Фиг. 4 схематично показывает другую систему для определения данных 312 подбора тюка. Элементы на фиг. 4, которые также показаны на фиг. 2 или фиг. 3, обозначены соответствующими ссылочными позициями в ‘300–серии’, и они не обязательно будут описаны снова здесь.
Система включает в себя транспортное средство 320. В этом примере, транспортное средство представляет собой беспилотное транспортное средство 320. Беспилотное транспортное средство 320 может представлять собой беспилотный летательный аппарат (иногда называемый дроном). В других примерах, транспортное средство 320 может представлять собой наземное транспортное средство, которое может быть или не быть беспилотным.
Беспилотное транспортное средство 320 может включать в себя один или более датчиков для получения полевых данных 318, и поле обзора 326 такого датчика схематично показано на фиг. 4. Полевые данные 318, которые являются характерными для необработанного валка 306 и/или тюков 308 могут обрабатываться, чтобы определить данные 316 свойства тюка. Например, свойства валка 302, для которых не ожидается значительное изменение при прессовании в тюки, могут использоваться как данные свойства тюка. Пример такого свойства представляет собой данные типа сельскохозяйственной культуры (убранной массы) тюка.
В этом примере, беспилотное транспортное средство 320 включает в себя датчик 322, который может получать полевые данные 318. В этом примере датчик 322 представляет собой камеру, которая может получать данные изображения поля. Данные изображения поля могут представлять собой данные двумерного изображения или данные трехмерного изображения, и в некоторых примерах камера может представлять собой 3D–сканер или 3D–камеру.
Альтернативно или дополнительно, полевые данные 318 могут включать в себя: радиолокационные данные поля, получаемые радиолокатором; оптико–локационные данные поля, получаемые датчиком на основе оптического локатора; данные влажности поля, получаемые датчиком влажности; инфракрасные (IR) данные поля, получаемые инфракрасным датчиком; ультразвуковые данные, получаемые ультразвуковым датчиком, или любой другой тип полевых данных 318 из любого типа датчика, который может получать информацию о сельскохозяйственном поле 302 или убранной массе на сельскохозяйственном поле 302. Контроллер 304 может обрабатывать один или более из этих разных типов полевых данных 318, прямо или косвенно, чтобы определить одно или оба из данных 310 местоположения тюка и данных 316 свойства тюка.
Контроллер 304 может определять данные свойства тюка на основе (прямо или косвенно) полевых данных 318. Например, контроллер 304 может обрабатывать полевые данные 318, чтобы определить данные типа убранной массы тюка. Контроллер 304 может выполнять алгоритм распознавания объектов на данных изображения поля (данных, которые являются характерными для валка 302 и/или тюка 308), чтобы определить одно или более из: типа убранной массы (данных типа убранной массы тюка) и длины стеблей в массе (данных длины стеблей тюка).
В некоторых примерах, контроллер 304 может также, или вместо этого, обрабатывать разные типы полевых данных 318, чтобы определять данные 316 свойства тюка. Например, контроллер 304 может обрабатывать полевые IR данные, чтобы определять температуру убранной массы (данные температуры тюка), или контроллер 304 может обрабатывать данные влажности поля, чтобы определять увлажненность/сырость убранной массы (данные влажности тюка).
В одном примере, контроллер 304 может определять данные измерения тюка на основе полевых данных 318. Данные измерения тюка могут включать в себя высоту, ширину, площадь поперечного сечения, объем или форму тюков 308. Данные измерения тюка могут поэтому представлять одномерные, двумерные или трехмерные физические характеристики тюков 308 и могут определяться на основе данных двумерного изображения или данных трехмерного изображения.
Контроллер 304 может определять данные свойства поля, которые являются характерными для свойства сельскохозяйственного поля 302, на основе полевых данных 318. Данные свойства поля могут включать в себя данные рельефа поля, которые являются характерными для рельефа сельскохозяйственного поля 302. Пользователь может предоставлять данные рельефа поля на контроллер 304 в некоторых примерах, поскольку получение этих данных может рассматриваться как одноразовое задание. В других примерах, контроллер 304 может определять данные рельефа поля, например, на основе данных изображения поля или радиолокационных данных поля. Контроллер 304 может затем определять данные плана маршрута подбора, в качестве примера данных 312 подбора тюка, на основе данных рельефа поля.
В некоторых примерах, транспортное средство 320 может включать в себя датчик измерения высоты для получения данных высоты тюка, характерных для высоты тюков 308. Если делается множество измерений высоты, в то время как транспортное средство 320 движется, они могут комбинироваться, чтобы обеспечить 3D–скан тюка 308. Датчик измерения высоты может также использоваться, чтобы измерять информацию о высоте среза, которая является характерной для высоты среза, если плотность срезанных концов достаточно высока. Независимо от того, как определяется высота среза, в некоторых примерах, контроллер 304 может вычитать высоту среза из измеренной высоты тюка, чтобы определять данные высоты тюка.
Транспортное средство 320 может получать: (i) полевые данные 318, которые являются характерными для сельскохозяйственного поля 302, на котором имеется один или более тюков 308, расположенных на нем; и (ii) данные местоположения на поле (не показано), связанные с полевыми данными 318. Контроллер 304 может при необходимости определять данные 312 подбора тюка на основе полевых данных 318 и данных местоположения на поле.
В этом примере, транспортное средство 320 получает данные местоположения на поле, связанные с данными изображения поля. Например, транспортное средство 320 может иметь систему 324 определения местоположения, такую как GPS, которая обеспечивает данные местоположения транспортного средства, которые являются характерными для местоположения транспортного средства 320, когда данные изображения поля получены. Контроллер 304 может также принимать данные направления камеры и данные высоты транспортного средства. Данные направления камеры могут быть характерными для направления, в котором обращена камера относительно транспортного средства 320. Данные направления камеры могут быть жестко кодированными, если камера неподвижно зафиксирована на транспортном средстве 320. Если камера подвижно установлена на транспортном средстве 320, то данные направления камеры могут принимать различные значения, которые могут приниматься как сигнал ввода в контроллере 304 от транспортного средства 320. Контроллер 304 может затем использовать простой тригонометрический алгоритм, чтобы соотнести данные местоположения на поле с объектами/областями, которые представлены данными изображения на поле, на основе данных местоположения транспортного средства, данных направления камеры, данных высоты транспортного средства (если транспортное средство 320 представляет собой летательный аппарат) и направления движения транспортного средства 320, как известно в данной области техники.
Также, в этом примере, контроллер 304 определяет данные 310 местоположения тюка на основе полевых данных 318 и данных местоположения на поле. Контроллер 304 может также определять данные измерения тюка, которые являются характерными для размера одного или более тюков, на основе полевых данных 318 и/или данных местоположения на поле. Как обсуждалось выше, контроллер 304 может затем определять данные 310 местоположения тюка также на основе данных измерения тюка.
Использование летательного аппарата 320 может обеспечить возможность получать полевые данные 318 с относительно большой высоты, чтобы получить общее представление поля 302, тем самым обеспечивая широкое поле обзора. Во время прессования в тюки, может использоваться другая стратегия: летательный аппарат 320 может лететь позади пресс–подборщика, чтобы записывать данные, так что контроллер 304 может определять данные 310 местоположения тюка и/или данные 316 свойства тюка по мере того, как тюки 308 размещаются на поле 302.
Должно быть понятно, что одна или более функций транспортного средства 320, которые описаны со ссылкой на фиг. 4, могут быть реализованы сельскохозяйственным транспортным средством/пресс–подборщиком 300 самостоятельно в некоторых примерах. Например, полевые данные 318, как это описано выше, могут определяться путем обработки сигналов, получаемых датчиками на сельскохозяйственном транспортном средстве/пресс–подборщике 300.
Также, в некоторых примерах, контроллер может использовать комбинацию данных пресс–подборщика, принятых от пресс–подборщика, и полевых данных, принятых от одного или более датчиков, чтобы определять данные местоположения тюка и данные свойства тюка. Данные пресс–подборщика и полевые данные могут использоваться вместе, например, как часть одного алгоритма или определять разные типы данных свойства тюка. В качестве альтернативы, контроллер может использовать данные пресс–подборщика, чтобы определять данные местоположения тюка, и может использовать полевые данные, чтобы определять данные свойства тюка, или наоборот.

Изобретение относится к области вычислительной техники. Технический результат заключается в повышении безопасности и сохранении качества тюков при выполнении операции для подбора тюков с поля. Технический результат достигается за счет определения данных подбора тюка на основе данных местоположения тюка и данных свойства тюка, причем данные подбора тюка содержат данные плана маршрута подбора, которые содержат упорядоченную последовательность местоположений подбора тюков, которые соответствуют местоположениям множества тюков на поле, при этом контроллер выполнен с возможностью определения упорядоченной последовательности на основе данных свойства тюка. 11 з.п. ф-лы, 4 ил.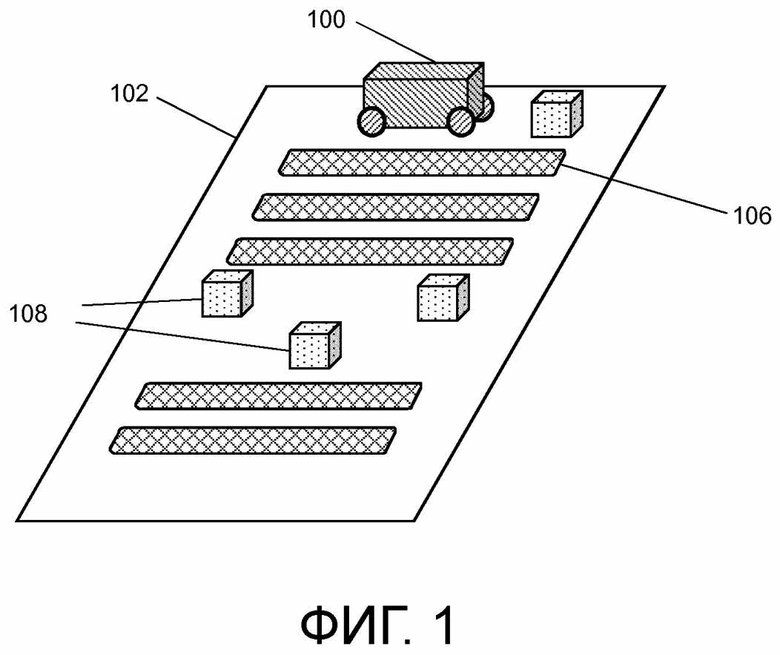
1. Система для определения данных подбора тюка, содержащая
контроллер, выполненный с возможностью:
приема данных местоположения тюка, характерных для местоположения множества тюков в поле;
приема данных свойства тюка, характерных для одного или более физических свойств каждого из множества тюков; и
определения данных подбора тюка на основе данных местоположения тюка и данных свойства тюка, причем данные подбора тюка связаны с операцией для подбора тюков с поля, при этом данные подбора тюка содержат данные плана маршрута подбора, которые являются характерными для порядка, в котором следует подбирать тюки, причем данные плана маршрута подбора содержат упорядоченную последовательность местоположений подбора тюков, которые соответствуют местоположениям множества тюков на поле, при этом контроллер выполнен с возможностью определения упорядоченной последовательности на основе данных свойства тюка.
2. Система по п. 1, в которой данные свойства тюка содержат данные измерений тюка, которые являются характерными для физического размера и/или формы тюка.
3. Система по п. 1, в которой данные свойства тюка содержат данные плотности тюка, которые являются характерными для плотности убранной массы в тюке.
4. Система по п. 1, в которой данные свойства тюка содержат данные веса тюка, которые являются характерными для веса тюка.
5. Система по п. 1, в которой данные свойства тюка содержат данные качества тюка, которые являются характерными для оценки качества тюка.
6. Система по п. 1, в которой данные свойства тюка содержат одно или более из:
данных влажности тюка, которые являются характерными для уровня влажности тюка;
данных типа сельскохозяйственной культуры тюка, которые являются характерными для типа сельскохозяйственной культуры, которая включена в тюк;
данных температуры тюка, которые являются характерными для температуры тюка;
данных длины стеблей тюка, которые являются характерными для длины стеблей сельскохозяйственной культуры в тюке;
временных данных тюка, которые являются характерными для одной или обеих из начальной и конечной временной метки создания тюка; и
данных формирования тюка, которые являются характерными для одного или более параметров производства, используемых для производства тюка.
7. Система по п. 1, в которой данные свойства тюка содержат данные качества тюка, причем контроллер выполнен с возможностью определения упорядоченной последовательности на основе списка порядка тюков от высокого качества к низкому качеству.
8. Система по п. 1, в которой данные подбора тюка содержат данные расположения тюков, которые являются характерными для того, как должны быть расположены тюки, когда они подбираются.
9. Система по п. 8, в которой контроллер выполнен с возможностью определения данных расположения тюков, так что тюки с связанными данными свойства тюка помещаются рядом друг с другом.
10. Система по п. 8, в которой данные расположения тюков содержат
для каждого из множества тюков данные положения на прицепе, которые являются характерными для положения тюка на прицепе.
11. Система по п. 10, в которой контроллер выполнен с возможностью определения данных положения на прицепе, так что тюки с заданными свойствами помещаются в заданные положения на прицепе.
12. Система по п. 11, в которой контроллер выполнен с возможностью применения одного или более критериев положения на прицепе к данным свойства тюка, чтобы определять данные расположения тюков.
| Шнекоцентробежный насос | 1987 |
|
SU1548531A1 |
| Способ шлифования зубчатых режущих инструментов | 1988 |
|
SU1604565A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| СПОСОБ И СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СИСТЕМ СЕЛЬХОЗМАШИН | 2007 |
|
RU2439835C2 |

