ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
1. Область техники, к которой относится изобретение
Раскрытый объект изобретения относится к устройствам, системам и процессам, используемым при управлении прицепом, присоединенным к транспортному средству.
2. Уровень техники
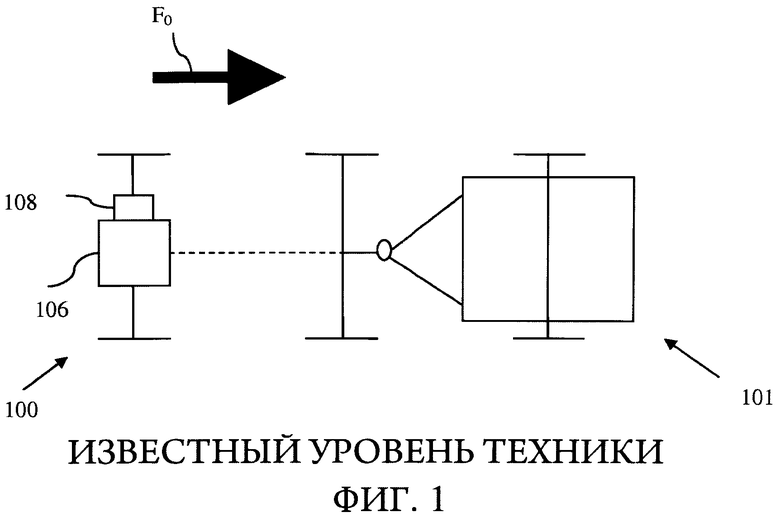
Люди уже давно используют транспортные средства, в том числе автомобили, внедорожники и/или легкие грузовики, при буксировке прицепов для повышения экономической выгоды и мобильности. Фиг.1 схематично иллюстрирует тяговое транспортное средство 100 и прицеп 101, соединенные известным в данной области техники способом, допускающим возможность поворота прицепа 101 относительно тягового транспортного средства 100. Транспортное средство 100 включает в себя силовой агрегат 106 и механизм 108 рулевого управления. Силовой агрегат 106 приводит в движение транспортное средство 100 и прицеп 101 посредством тягового усилия F0 в направлении вперед (или в направлении назад) любым известным в данной области техники способом. На фиг.1 представлено направление тягового усилия F0, когда транспортное средство 100 и прицеп движутся в направлении назад. Механизм 108 рулевого управления выполнен любым известным в данной области техники способом, позволяющим водителю направлять транспортное средство 100 влево или вправо относительно направления движения по дороге.
При движении в направлении вперед прицеп 101, в общем, повторяет траекторию движения тягового транспортного средства 100. От водителя обычно требуется выравнивание прицепа за счет увеличения окружности поворота. Использование прицепа 101 также, как правило, приводит к снижению ускорения/замедления и, таким образом, требует увеличения расстояния для достижения нужной конечной скорости, а также требует увеличения тормозного пути. Несмотря на это, действия водителя при буксировке прицепа 101 в прямом направлении имеют очень большое сходство с действиями, предпринимаемыми водителем для направления транспортного средства 100 без прицепа 101 на буксире.
В отличие от этого, при движении в направлении назад тяговое транспортное средство 100 толкает прицеп 101, как указано, в направлении тягового усилия F0 на фиг.1. Действия водителя при движении в направлении назад зачастую отличаются от действий водителя по обеспечению управления при движении в направлении вперед. Одна из причин этого состоит в том, что соединение с возможностью поворота между прицепом 101 и транспортным средством 100 может приводить к усложнению входного воздействия водителя транспортного средства 100 по контролю за траекторией движения прицепа 101. Например, входное воздействие по рулевому управлению, требуемое для начала поворота прицепа 101 влево относительно водителя, совершается в направлении поворота транспортного средства 100 вправо. Другие переменные, которые могут приводить к изменению входных воздействий по рулевому управлению от транспортного средства 100, включают в себя: различие наклонов поверхностей между транспортным средством 100 и прицепом 101; различие типов поверхностей для транспортного средства 100 и прицепа 101 (например, бетон и песок); неровности поверхностей движения; небольшие препятствия (такие как камни, корни деревьев, небольшие бревна и т.д.); и/или другие факторы, которые могут оказывать влияние на входные воздействия по рулевому управлению на прицеп 101. В результате, для направления прицепа 101 в нужном обратном направлении у водителя может возникнуть необходимость постоянно корректировать входное воздействие на направление (то есть влево, вправо, вперед и/или назад) и/или скорость (например, быстро, медленно, остановка). Это может вызывать увеличение времени и затруднений у водителя, связанных с маневрированием прицепа 101 в обратном направлении. Неопытный водитель может преувеличить это условие ввиду возможного стремления к чрезмерной корректировке нежелательного направления прицепа при неправильном входном воздействии на направление и/или ненужном входном воздействии на скорость.
Таким образом, существует необходимость в создании системы и способа управления, которые могут обеспечить водителю возможность управлять движением транспортного средства и прицепа в обратном направлении с уверенностью и точностью и могут также обеспечить повышение эффективности и безопасности маневра, независимо от уровня квалификации водителя транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним из аспектов раскрытого объекта изобретения система транспортных средств типа автопоезда может включать в себя первое транспортное средство, присоединенное выборочно и с возможностью поворота ко второму транспортному средству. Первое множество колес может быть смонтировано на первом транспортном средстве, где это первое множество включает в себя, по меньшей мере, одно управляемое колесо, присоединенное с возможностью поворота к первому транспортному средству. Первый силовой агрегат может быть смонтирован на первом транспортном средстве, где первый силовой агрегат может осуществлять привод, по меньшей мере, одного из первого множества колес. Первый силовой агрегат может включать в себя, по меньшей мере, одно из: передаточное число переднего хода и передаточное число заднего хода, и может осуществлять привод, по меньшей мере, одного из второго множества колес, когда выбрано, по меньшей мере, одно из: передаточное число переднего хода и передаточное число заднего хода. Первый механизм рулевого управления может быть присоединен, по меньшей мере, к одному управляемому колесу из первого множества для поворота, по меньшей мере, одного управляемого колеса из первого множества. Система транспортных средств типа автопоезда может также включать в себя контроллер, электрически соединенный с каждым из: первым силовым агрегатом, вторым силовым агрегатом, датчиком входного воздействия по рулевому управлению и датчиком выбора передачи.
В соответствии с другим аспектом раскрытого объекта изобретения система транспортных средств типа автопоезда, включающая в себя первое транспортное средство, присоединенное выборочно и с возможностью поворота ко второму транспортному средству, может включать в себя первое множество колес, смонтированных на первом транспортном средстве, где первое множество колес включает в себя, по меньшей мере, одно управляемое колесо, присоединенное с возможностью поворота к первому транспортному средству. Первый силовой агрегат может быть смонтирован на первом транспортном средстве, где первый силовой агрегат выполнен с возможностью привода, по меньшей мере, одного из первого множества колес, и первый силовой агрегат включает в себя, по меньшей мере, одно из: передаточное число переднего хода и передаточное число заднего хода. Первый механизм рулевого управления может быть присоединен, по меньшей мере, к одному управляемому колесу из первого множества колес для поворота, по меньшей мере, одного управляемого колеса. Второе множество колес может быть смонтировано на втором транспортном средстве, где второе множество колес включает в себя, по меньшей мере, одно управляемое колесо, присоединенное с возможностью поворота ко второму транспортному средству. Второй силовой агрегат может быть смонтирован на втором транспортном средстве, где второй силовой агрегат выполнен с возможностью привода, по меньшей мере, одного из второго множества колес. Второй механизм рулевого управления может быть присоединен, по меньшей мере, к одному управляемому колесу из второго множества для поворота, по меньшей мере, одного управляемого колеса из второго множества. Датчик входного воздействия по рулевому управлению может быть выполнен с возможностью вывода данных, указывающих на намеченное направление рулевого управления, введенное водителем системы транспортных средств типа автопоезда. Датчик выбора передачи может быть выполнен с возможностью вывода данных, указывающих на выбор передаточного числа заднего хода. Контроллер может быть электрически соединен с каждым из: первым силовым агрегатом, вторым силовым агрегатом, датчиком входного воздействия по рулевому управлению и датчиком выбора передачи, причем контроллер выполнен с возможностью манипулирования реакцией первого силового агрегата и реакцией второго силового агрегата на основе выходных данных, принятых от датчика выбора передачи, и манипулирования вторым механизмом рулевого управления для обеспечения углового положения, по меньшей мере, одного управляемого колеса из второго множества колес на основе выходных данных, принятых от датчика входного воздействия по рулевому управлению и датчика выбора передачи, где угловое положение измеряется относительно продольного направления второго транспортного средства.
В соответствии с другим аспектом раскрытого объекта изобретения предлагается прицеп для использования в системе транспортных средств типа автопоезда, которая включает в себя транспортное средство, имеющее множество колес транспортного средства, по меньшей мере, с одним из множества колес транспортного средства, смонтированным с возможностью поворота на транспортном средстве, силовой агрегат транспортного средства, имеющий передаточное число заднего хода и множество передаточных чисел переднего хода для привода, по меньшей мере, одного из: множество колес транспортного средства, датчик входного воздействия по рулевому управлению, выполненный с возможностью вывода данных, указывающих на намеченное направление рулевого управления, введенное водителем транспортного средства, и датчик выбора передачи, выполненный с возможностью вывода данных, указывающих на выбор передаточного числа заднего хода. Прицеп может включать в себя сцепку в сборе, выполненную с возможностью присоединения-отсоединения прицепа от транспортного средства и обеспечения поворота прицепа относительно транспортного средства, когда сцепка в сборе присоединена к транспортному средству. Множество колес прицепа могут быть смонтированы на прицепе, где множество колес прицепа включают в себя, по меньшей мере, одно управляемое колесо прицепа, присоединенное с возможностью поворота к прицепу. Силовой агрегат прицепа может быть выполнен с возможностью привода, по меньшей мере, одного из множества колес прицепа. Механизм рулевого управления прицепа может быть присоединен, по меньшей мере, к одному управляемому колесу прицепа для поворота, по меньшей мере, одного управляемого колеса прицепа. Контроллер может быть выполнен с возможностью электрического соединения с каждым из: силовым агрегатом, силовым агрегатом прицепа, датчиком входного воздействия по рулевому управлению и датчиком выбора передачи, обеспечиваемого, когда сцепка в сборе присоединена к транспортному средству. Контроллер также может быть выполнен с возможностью манипулирования реакцией силового агрегата транспортного средства и реакцией силового агрегата прицепа на основе данных, принятых от датчика выбора передачи, когда сцепка в сборе присоединена к транспортному средству. Кроме того, контролер может быть выполнен с возможностью манипулирования механизмом рулевого управления прицепа для обеспечения углового положения, по меньшей мере, одного управляемого колеса прицепа на основе данных, принятых от датчика входного воздействия по рулевому управлению и датчика выбора передачи, где угловое положение измеряется относительно оси привода прицепа прямо вперед.
В соответствии с другим аспектом раскрытого объекта изобретения способ управления системой транспортных средств типа автопоезда, включающей в себя первое транспортное средство, присоединенное выборочно и с возможностью поворота ко второму транспортному средству, может включать в себя обнаружение выбора водителем первого транспортного средства одного из: передаточного числа заднего хода и передаточного числа переднего хода. Кроме того, способ может включать себя обнаружение входного воздействия по рулевому управлению от водителя первого транспортного средства и определение первой выходной мощности на основе обнаруженного выбора одного из: передаточного числа заднего хода и передаточного числа переднего хода. Кроме того, способ может включать в себя определение второй выходной мощности на основе обнаруженного выбора одного из: передаточного числа заднего хода и передаточного числа переднего хода и определение угла рулевого управления для управляемого колеса, смонтированного с возможностью поворота на втором транспортном средстве, на основе обнаруженного входного воздействия по рулевому управлению, где угол рулевого управления измеряется относительно оси привода второго транспортного средства прямо вперед. Кроме того, способ может включать в себя подачу сигнала на первый силовой агрегат для привода колеса, смонтированного на первом транспортном средстве, с первой выходной мощностью и подачу сигнала на второй силовой агрегат для привода колеса второго транспортного средства со второй выходной мощностью. Кроме того, способ может включать в себя подачу сигнала на механизм рулевого управления, смонтированный на втором транспортном средстве, для размещения управляемого колеса, смонтированного с возможностью поворота на втором транспортном средстве, с определенным углом рулевого управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже приводится подробное описание раскрытого объекта изобретения согласно настоящей заявке со ссылками на предпочтительные варианты осуществления устройства и способа, приводимые в качестве примеров, и на прилагаемые чертежи, на которых:
Фиг.1 - схематический вид системы, состоящей из тягового транспортного средства и прицепа, в соответствии с известным уровнем техники.
Фиг.2 - схематический вид примера тягового транспортного средства и прицепа в соответствии с принципиальными положениями раскрытого объекта изобретения.
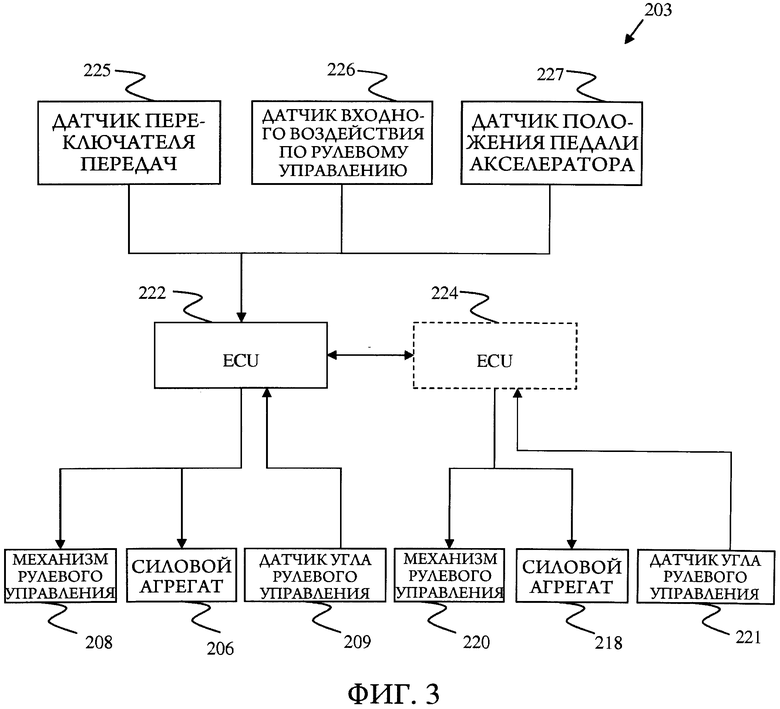
Фиг.3 - блок-схема, иллюстрирующая пример системы управления, выполненной в соответствии с принципиальными положениями раскрытого объекта изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг.2 иллюстрирует схематический вид системы транспортных средств, включающей в себя тяговое транспортное средство 200, прицеп 201 и систему 203 управления - все выполненные в соответствии с принципиальными положениями раскрытого объекта изобретения. Более подробная иллюстрация системы 203 управления схематично представлена на фиг.3. Прицеп 201 может быть соединен с возможностью поворота с транспортным средством 200 любым известным в данной области техники способом, например с помощью крюка и петли и т.д. Как более подробно описывается ниже, каждое транспортное средство 200 и прицеп 201 могут включать в себя силовой агрегат, по меньшей мере, одно колесо с приводом от соответствующего силового агрегата и, по меньшей мере, одно управляемое колесо. Такая конструкция позволяет повысить удобство управления транспортными средствами и сократить продолжительность операций управления, обеспечивая тем самым водителю любого уровня квалификации возможность направлять прицеп 201 во время движения транспортного средства 200 в направлении назад или вперед.
Тяговое транспортное средство 200 может включать в себя пару передних колес 202, смонтированных любым известным в данной области техники способом, для обеспечения вращения при перемещении и поворота при рулевом управлении. Тяговое транспортное средство 200 может включать в себя пару задних колес 204 (или любое число колес по желанию или требованию для планируемой экономической выгоды от тягового транспортного средства 200), смонтированных любым известным в данной области техники способом, для обеспечения вращения при перемещении. Задние колеса 204 также могут быть поворотными для обеспечения возможности дополнительного рулевого управления.
Привод пары передних колес 202 может осуществляться от силового агрегата 206. Силовой агрегат 206 может включать в себя источник энергии, например электродвигатель, двигатель внутреннего сгорания, гибридный источник энергии или другой источник энергии, известный в данной области техники. Силовой агрегат 206 также может включать в себя трансмиссию или систему прямого привода или другую альтернативную систему передачи энергии, известную в данной области техники. Трансмиссия может быть автоматической, ручной или полуавтоматической и со ступенчатым или бесступенчатым изменением передаточных чисел, известным в данной области техники. Силовой агрегат 206 может быть выполнен, например, с возможностью привода или пары передних колес 202 (привод на передние колеса), пары задних колес 204 (привод на задние колеса) или и пары передних колес 202 и пары задних колес 204 (привод на все колеса или на 4 колеса). В другом варианте изобретения силовой агрегат 206 может также обеспечивать независимый привод каждого колеса или в общей сложности только одного колеса. Силовой агрегат 206 может также включать в себя педаль 207 акселератора, выполненную так, чтобы водитель транспортного средства 200 мог вручную регулировать выходную мощность источника энергии.
Механизм 208 рулевого управления также может быть функционально соединен с парой передних колес 202 для обеспечения водителю тягового транспортного средства 200 возможности маневрировать парой передних колес 202 под углом относительно продольной оси Li транспортного средства 200. Например, рулевой механизм 208 может включать в себя рулевое колесо и механические передачи, такие как реечная передача, известная в данной области техники, для осуществления рулевого управления транспортным средством. Механизм 208 рулевого управления может также включать в себя гидравлические компоненты, обеспечивающие возможность рулевого управления транспортным средством с усилением. Разумеется, могут быть использованы различные механизмы рулевого управления, известные в данной области техники.
Силовой агрегат 206 может включать в себя компоненты, выполненные с возможностью распределения энергии от источника энергии на ведущее(ие) колесо(а). Ведущее(ие) колесо(а) может(гут) представлять собой пару задних колес 204 для заднеприводного транспортного средства, пару передних колес 202 для переднеприводного транспортного средства, обе (или по выбору) пары колес для системы привода на четыре колеса или полного привода или одно колесо для системы привода на одно колесо. Компоненты силового агрегата могут представлять собой любые такие компоненты, известные в данной области техники, для передачи энергии от источника энергии или трансмиссии на соответствующее(ие) колесо(а).
Тяговое транспортное средство 200 может включать в себя тягово-сцепное устройство 212, которое может быть расположено вблизи задней части транспортного средства 200. При этом может быть использовано устройство любого типа, известного в данной области техники, в том числе шарового типа, типа пятого колеса и крюкового типа. Тягово-сцепное устройство 212 может быть выполнено с возможностью сцепления с дышлом 214 прицепа, прикрепленным к раме 215 прицепа, что обеспечивает возможность присоединения прицепа 201 к транспортному средству 200 для буксировки или толкания прицепа 201 транспортным средством 200. Соединение между тягово-сцепным устройством 212 и дышлом 214 прицепа может быть по выбору расцепным и может быть выполнено с возможностью поворота транспортного средства 200 относительно прицепа 201.
Прицеп 201 может также включать в себя множество колес 216, силовой агрегат 218 прицепа и механизм 220 рулевого управления прицепа. Множество колес 216 могут быть соединены с рамой 215 прицепа и могут быть выполнены с возможностью обеспечения качения прицепа 201 по дороге, проезжей части улицы или другой требуемой поверхности. Прицеп 201 может иметь ось привода прямо вперед, которая совпадает с продольной осью прицепа 201, когда длина прицепа в направлении движения больше, чем в поперечном направлении, и перпендикулярна продольной оси прицепа 201, когда длина прицепа в поперечном направлении больше, чем в направлении движения. По меньшей мере, одно из множества колес 216 может быть соединено с возможностью поворота с рамой 215 прицепа. В другом варианте изобретения возможно жесткое присоединение множества колес 216 к оси (непоказанной), смонтированной с возможностью поворота на раме 215 прицепа. В зависимости от размера и области применения прицепа 201 прицеп 201 также может быть снабжен несколькими осями.
Силовой агрегат 218 прицепа может осуществлять привод, по меньшей мере, одного из множества колес 216 любым известным в данной области техники способом. Силовой агрегат 218 прицепа может включать в себя те же или подобные компоненты, описанные выше применительно к силовому агрегату 201 транспортного средства. Ведущее(ие) колесо(а) также может быть поворотным колесом(ами) из множества колес 216.
Механизм 220 рулевого управления прицепа может поворачивать, по меньшей мере, одно из множества колес 216 любым известным в данной области техники способом. Механизм 220 рулевого управления прицепа также может включать в себя те же или подобные компоненты, описанные выше применительно к механизму 208 рулевого управления транспортного средства.
Система 203 управления может включать в себя силовые агрегаты 206, 218, механизмы 208, 220 рулевого управления, датчик 209 угла рулевого управления транспортного средства, датчик 221 угла рулевого управления прицепа, электронный блок 222 управления, датчик 225 переключателя передач, датчик 226 входного воздействия по рулевому управлению и датчик 227 положения педали акселератора. Электронный блок 222 управления может быть электрически соединен с каждым из вышеупомянутых компонентов системы 203 управления. Датчики 225, 226 и 227 могут быть выполнены с возможностью передачи необработанных данных в блок 222 управления или с возможностью передачи обработанных данных в блок 222 управления. Блок 222 управления и датчики 225, 226, 227 могут быть реализованы одними только аппаратными средствами или в виде комбинации с программным обеспечением любым известным в данной области техники способом для решения задач, описываемых ниже. Блок 222 управления и датчики 225, 226, 227 также могут быть выполнены с односторонней или двусторонней связью. Блок 222 управления обычно именуется с использованием различных терминов, таких как контроллер, электронный блок управления (ECU), центральный процессор (CPU) или других подобных терминов.
Предполагается, что при управлении системой транспортных средств в направлении назад водитель может управлять транспортным средством в двух различных режимах: в режиме "с приводом от транспортного средства" и в режиме "с приводом от прицепа". Усовершенствование различных режимов может достигаться за счет монитора 229m, на который транслируется видео камеры 229c, с фокусированной на направлении привода в направлении назад. Камера 229c может быть размещена или на транспортном средстве 200, или на прицепе 201 и должна обеспечивать обзор пространства, в которое водитель намерен направить систему транспортных средств при движении в направлении назад.
В режиме "с приводом от транспортного средства" "помощь" монитора 229m водителю может заключаться в принятии решений по рулевому управлению на основе обычных внешних видов из окон системы транспортных средств с наведением по монитору 229m. Манипулирование контроллером 203, рулевым механизмом 208, силовым агрегатом 206, силовым агрегатом 218 прицепа и рулевым механизмом 220 прицепа может осуществляться для помощи в обычном маневре движения задним ходом системы транспортных средств за счет регулирования мощности и рулевого управления на основе соответствующих различных входных воздействий по рулевому управлению на мощность от водителя (входных воздействий, основанных на способности водителя понимать, что вождение/руление транспортного средства 200 осуществляется в режиме обычного заднего хода).
В режиме "с приводом от прицепа" водитель может управлять системой транспортных средств так, как будто водитель ведет прицеп 201 в качестве ведущего транспортного средства. В этом режиме при наличии камеры 229c и монитора 229m водитель может полагаться на монитор 229m, как будто ведет систему транспортных средств в направлении вперед в пространство, отображенное на мониторе 229m. Таким образом, входное воздействие по рулевому управлению от водителя может быть осуществлено исключительно на основе вида на мониторе (при этом входное воздействие водителя будет отличаться от входного воздействия водителя в режиме привода от транспортного средства для одного и того же намеченного маневра и должно по-разному интерпретироваться блоком 222 управления). В этом случае блок 222 управления может быть запрограммирован на подачу сигналов угла рулевого управления, по меньшей мере, на одно или на оба управляемых колеса первого транспортного средства 200 и прицепа 201 в соответствии с нужным водителю маневром, причем нужный маневр может быть основан исключительно на обзоре с помощью монитора (или на основе способности водителя понимать, что входное воздействие по рулевому управлению и входное воздействие на педаль акселератора обеспечивают движение и рулевое управление прицепом 201 в направлении назад). Другими словами, входное воздействие по рулевому управлению от водителя соответствует входным воздействиям, подобным тем, которые имели бы место, если бы водитель рулил/вел прицеп 201 в намеченное положение, и прицеп 201 был бы ведущим/рулевым транспортным средством.
У водителя может возникнуть необходимость в выборе этого режима "с приводом от прицепа" путем переключения, которое может сопровождаться звуковым оповещением, чтобы гарантировать, что водитель понимает, что управление осуществляется на основе использования прицепа 201 в качестве управляющего/ведущего транспортного средства. Блок 222 управления также может быть запрограммирован на предотвращение перехода системы транспортных средств в этот режим "с приводом от прицепа", когда водитель выбирает передаточное число переднего хода.
Из фиг.2 и 3 следует, что при инициировании маневра движения задним ходом ведущего транспортного средства 200 и прицепа 201 водитель устанавливает рычаг переключения передач силового агрегата 206 в положение "задний ход". Датчик 225 переключателя передач может обнаружить положение (например, в том числе, "стоянка", "нейтраль", "задний ход", "движение передним ходом") и передавать полученные данные в блок 222 управления. Когда блок 222 управления определяет, что была выбрана передача заднего хода, водитель может регулировать намеченное направление рулевого управления для облегчения маневрирования задним ходом как тягового транспортного средства 200, так и прицепа 201. Намеченное направление рулевого управления может быть введено водителем с помощью любого интерфейса, известного в данной области техники, такого как, в том числе, руль, джойстик, штурвал или рычаги. Намеченное направление рулевого управления может быть обнаружено с помощью датчика 226 входного воздействия по рулевому управлению, который затем передает введенные данные рулевого управления в блок 222 управления.
Кроме того, водитель тягового транспортного средства 200 может регулировать мощность источника энергии путем манипулирования педалью 207 акселератора. Датчик 227 положения педали акселератора может быть использован для обнаружения относительного положения педали 207 акселератора и передачи полученных данных в блок 222 управления. Блок 222 управления может быть выполнен с возможностью определения потребности по общей выходной мощности на основе данных, полученных от датчика 227 положения педали акселератора.
Блок 222 управления может включать в себя логическую управляющую схему, осуществляющую обработку данных по намеченному направлению рулевого управления и положению педали акселератора, которые вводятся в блок 222 управления для определения и вырабатывания команды задания соответствующего тягового усилия F1, передаваемой на силовой агрегат 206, и команды задания угла θ1 колесной пары транспортного средства, которая передается на механизм 208 рулевого управления. Логическая управляющая схема может быть представлена одними только аппаратными средствами или в комбинации с программным обеспечением любым известным в данной области техники способом. Угол θ1 колесной пары транспортного средства может быть определен по углу между парой передних колес 202 и линией L1, параллельной либо продольной оси транспортного средства, либо направлению движения транспортного средства прямо/передним ходом. Блок 222 управления может взаимодействовать с силовым агрегатом 206 и/или механизмом 208 рулевого управления посредством беспроводной связи, проводной связи или любого другого типа связи, известной в данной области техники.
Кроме того, логическая управляющая схема блока 222 управления может вырабатывать команду задания угла θ2 колесной пары прицепа для механизма 220 рулевого управления прицепа и команду задания тягового усилия F2 для силового агрегата 218 прицепа. Угол θ2 колесной пары прицепа может быть определен по углу между колесами из множества колес 216 и линий L2, параллельной либо продольной оси прицепа 201, либо направлению движения прицепа 201 прямо/задним ходом. Блок 222 управления может взаимодействовать с силовым агрегатом 206 и/или механизмом 208 рулевого управления посредством беспроводной связи, проводной связи или любого другого типа связи, известной в данной области техники.
Блок 222 управления может контролировать выбор передачи, датчик 226 входного воздействия по рулевому управлению, механизмы 208, 220 рулевого управления, датчик 227 педали акселератора и выходную мощность источников энергии прицепа и транспортного средства, подавать сигналы регулирования углов рулевого управления θ1 и θ2 и тяговых усилий F1 и F2 для достижения самого полного соответствия измеренным параметрам. Поэтому блок 222 управления может обеспечивать наведение транспортного средства 200 и прицепа 201 при использовании как статического, так и динамического входного воздействия от водителя транспортного средства 200, а также воздействия факторов окружающей среды от источников, находящихся вне транспортного средства, таких как, в том числе, камни, корни, неровные поверхности, относительные наклоны между прицепом 201 и транспортным средством 200, различие поверхностей для прицепа 201 и транспортного средства 200 и т.д.
Угол рулевого управления θ1 может представлять собой угол между парой задних колес 204 и линией L1 (то есть линией, параллельной либо продольной оси тягового транспортного средства 200, либо направлению движения тягового транспортного средства 200 в направлении прямо) для транспортного средства с управлением задними колесами. В другом варианте изобретения угол рулевого управления θ1 может представлять собой угол рулевого управления передних и задних колес 202 и 204, если тяговое транспортное средство 200 является транспортным средством с управлением четырьмя колесами.
Кроме того, датчики также могут быть использованы для указания угла между ведущим транспортным средством 200 и прицепом 201. Этот угол также может быть подвергнут обработке с помощью блока 222 управления для определения F1, F2, θ1 и θ2.
Блок 222 управления может быть выполнен с возможностью регулирования тяговых усилий F1 и F2 и углов рулевого управления θ1, θ2 колесных пар без непрерывного дополнительного входного воздействия от водителя 200 транспортного средства, обеспечивая, таким образом, водителю возможность успешного маневрирования прицепом 201 в нужном направлении без необходимости компенсировать уходы прицепа 201, толкаемого в направлении назад ведущим транспортным средством 200, с траектории движения.
Тяговое усилие F2 от прицепа 201 может быть задано с помощью блока 222 управления существенно больше, чем тяговое усилие F1 от тягового транспортного средства 200, так, чтобы прицеп 201 фактически тянул тяговое транспортное средство 200 во время маневрирования задним ходом. В другом варианте изобретения тяговое усилие F2 от прицепа 201 может быть задано с помощью блока 222 управления существенно меньше, чем тяговое усилие F1 от тягового транспортного средства 200, так чтобы ведущее транспортное средство 200 фактически толкало прицеп 201 во время маневрирования задним ходом. В другом варианте изобретения тяговые усилия F1 и F2 могут быть практически равными. В зависимости от входных переменных и нужного направления привода блок 222 управления может задать одно или оба тяговых усилия F1 и F2 равными нулю. В каждом варианте осуществления силовой агрегат 206 тягового транспортного средства 200 и силовой агрегат 218 прицепа могут способствовать общему перемещению системы прицепа и тягового транспортного средства. Поэтому при движении тягового транспортного средства 200 и прицепа 201 задним ходом входное управляющее воздействие водителя может быть минимизировано, что может приводить к сглаживанию траектории движения прицепа 201. Возможно также повышение удобства и простоты размещения прицепа 201 в нужном положении. Кроме того, любое входное воздействие водителя, которое может приводить к нежелательному относительному угловому положению между прицепом 201 и тяговым транспортным средством 200 может быть минимизировано с помощью алгоритма управления, исполняемого блоком 222 управления.
Выше были описаны определенные варианты осуществления изобретения. Однако следует иметь в виду, что изобретение может быть реализовано и выполнено многими другими путями в пределах существа и объема изобретения. Система управления прицепом согласно раскрытому объекту изобретения может включать в себя второй блок 224 управления, который может взаимодействовать прямо или опосредованно с силовым агрегатом 218 прицепа и механизмом 220 рулевого управления прицепа через датчик 221 угла рулевого управления прицепа.
Второй блок 224 управления также может взаимодействовать с первым блоком 222 управления и может передавать командную информацию, включающую в себя тяговое усилие F2 и угол рулевого управления θ2. В дополнительном предпочтительном варианте осуществления механизм 208 рулевого управления и датчик 209 угла рулевого управления ведущего транспортного средства 200 могут быть функционально соединены со вторым множеством колес 204. Блок 222 управления может быть размещен на тяговом транспортном средстве 200, на прицепе 201 или в удаленном месте. Точно так же блок 224 управления может быть размещен на тяговом транспортном средстве 200, на прицепе 201 или в удаленном месте. В одном предпочтительном варианте осуществления один блок 222 управления может быть размещен на тяговом транспортном средстве 200, а другой блок 224 управления может быть размещен на прицепе 201. В еще одном дополнительном варианте осуществления блок 222 управления и/или блок 224 управления могут принимать данные измерений от дополнительных датчиков, таких как, в том числе, датчик, который считывает данные начального относительного положения тягового транспортного средства 200 и прицепа 201, датчик наклона поверхности дороги или любой другой датчик с возможностью предоставления информации, которая может быть использована при определении требуемых тяговых усилий F1 или F2 и/или углов рулевого управления θ1 или θ2 ведущего транспортного средства 200 или прицепа 201.
В дополнительном варианте осуществления тяговое транспортное средство 200 может иметь больше или меньше, чем пару передних колес, и больше или меньше, чем пару задних колес. Например, тяговое транспортное средство может иметь единственное управляемое переднее колесо и единственное заднее колесо, привод которого осуществляется с помощью источника энергии непосредственно или через трансмиссию. Транспортное средство 200 также может иметь единственное управляемое колесо и пару задних колес.
В дополнительном варианте осуществления прицеп 201 может иметь единственное управляемое колесо и пару задних колес, причем привод, по меньшей мере, одного из пары задних колес или единственного управляемого колеса осуществляется с помощью источника энергии прицепа непосредственно или через трансмиссию прицепа.
Выше было приведено подробное описание объекта изобретения со ссылками на предпочтительные варианты его осуществления, однако специалисту в данной области техники будет очевидна возможность внесения различных изменений и использования эквивалентов, не выходящих за пределы объема изобретения. Содержание всех материалов, рассмотренных в приведенном выше разделе "Уровень техники", включено в данный документ путем ссылки во всей своей полноте.
Группа изобретений относится к системе транспортных средств типа автопоезда, способу управления автопоездом и прицепу для использования в системе автопоезда. Система транспортных средств типа автопоезда включает в себя транспортное средство, прицеп, контроллер, датчик входного воздействия по рулевому управлению и датчик выбора передачи. Транспортное средство присоединено с возможностью поворота к прицепу. На транспортном средстве и прицепе смонтированы силовые агрегаты, поворотные колеса и механизмы рулевого управления. Контроллер соединен с каждым из силовых агрегатов, датчиком входного воздействия по рулевому управлению и датчиком выбора передачи. Контроллер выполнен с возможностью манипулирования реакцией силовых агрегатов на основе выходных данных, принятых от датчика выбора передачи, и манипулирования механизмом рулевого управления прицепа для обеспечения углового положения управляемого колеса на основе выходных данных, принятых от датчика входного воздействия по рулевому управлению и датчика выбора передачи, где угловое положение измеряется относительно продольного направления прицепа. Достигается обеспечение водителю возможности управлять движением транспортного средства и прицепа в обратном направлении, повышение эффективности и безопасности маневра. 3 н. и 17 з.п. ф-лы, 3 ил.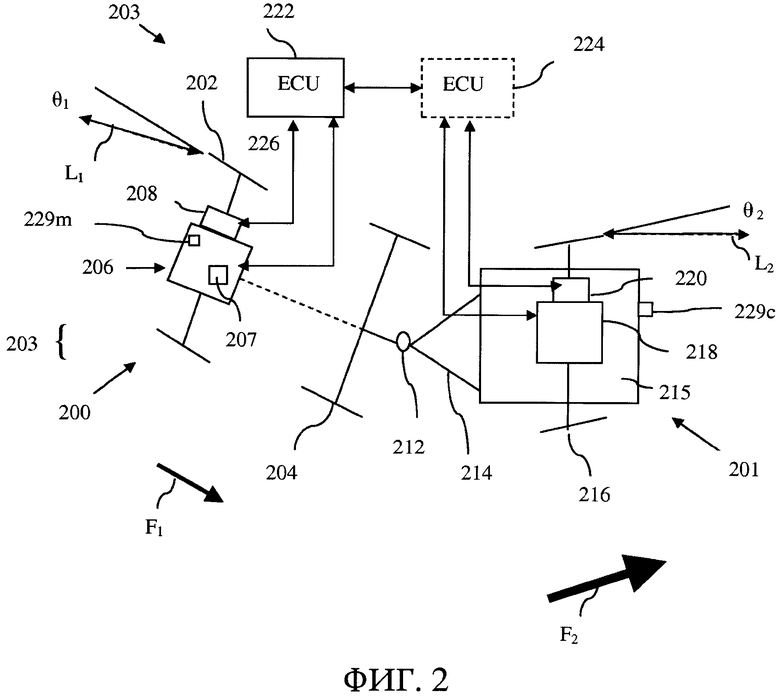
1. Система транспортных средств типа автопоезда, содержащая:
первое транспортное средство;
второе транспортное средство, присоединенное выборочно и с возможностью поворота к первому транспортному средству;
первое множество колес, смонтированных на первом транспортном средстве, где первое множество колес включает в себя, по меньшей мере, одно управляемое колесо, присоединенное с возможностью поворота к первому транспортному средству;
первый силовой агрегат, смонтированный на первом транспортном средстве, где первый силовой агрегат выполнен с возможностью привода, по меньшей мере, одного из первого множества колес, и первый силовой агрегат включает в себя, по меньшей мере, одно из: передаточное число переднего хода и передаточное число заднего хода;
первый механизм рулевого управления, присоединенный, по меньшей мере, к одному управляемому колесу из первого множества колес для поворота, по меньшей мере, одного управляемого колеса;
второе множество колес, смонтированных на втором транспортном средстве, где второе множество колес включает в себя, по меньшей мере, одно управляемое колесо, присоединенное с возможностью поворота ко второму транспортному средству;
второй силовой агрегат, смонтированный на втором транспортном средстве, где второй силовой агрегат выполнен с возможностью привода, по меньшей мере, одного из второго множества колес;
второй механизм рулевого управления, присоединенный, по меньшей мере, к одному управляемому колесу из второго множества для поворота, по меньшей мере, одного управляемого колеса из второго множества;
датчик входного воздействия по рулевому управлению, выполненный с возможностью вывода данных, указывающих на намеченное направление рулевого управления, введенное водителем системы транспортных средств типа автопоезда;
датчик выбора передачи, выполненный с возможностью вывода данных, указывающих на выбор передаточного числа заднего хода; и
контроллер, электрически соединенный с каждым из: первым силовым агрегатом, вторым силовым агрегатом, датчиком входного воздействия по рулевому управлению и датчиком выбора передачи, причем контроллер выполнен с возможностью
манипулирования реакцией первого силового агрегата и реакцией второго силового агрегата на основе выходных данных, принятых от датчика выбора передачи, и
манипулирования вторым механизмом рулевого управления для обеспечения углового положения, по меньшей мере, одного управляемого колеса из второго множества колес на основе выходных данных, принятых от датчика входного воздействия по рулевому управлению и датчика выбора передачи, где угловое положение измеряется относительно продольного направления второго транспортного средства.
2. Система транспортных средств типа автопоезда по п.1, отличающаяся тем, что контроллер выполнен с возможностью манипулирования реакцией первого силового агрегата, реакцией второго силового агрегата и угловым положением, по меньшей мере, одного управляемого колеса из второго множества колес, когда данные, принятые от датчика выбора, указывают на выбор передаточного числа заднего хода.
3. Система транспортных средств типа автопоезда по п.2, отличающаяся тем, что дополнительно содержит:
педаль акселератора, смонтированную с возможностью перемещения на первом транспортном средстве и выполненную с возможностью приема воздействия, указывающего на намеченную скорость для системы транспортных средств типа автопоезда, от водителя первого транспортного средства; и
датчик положения педали, электрически соединенный с контроллером и выполненный с возможностью вывода данных, указывающих на положение педали акселератора, причем
контроллер выполнен с возможностью манипулирования реакцией первого силового агрегата и реакцией второго силового агрегата в результате
определения потребности по общей выходной мощности на основе данных, принятых от датчика положения педали,
определения первой выходной мощности и второй выходной мощности, где сумма первой выходной мощности и второй выходной мощности практически равна общей выходной мощности, и
подачи сигналов первой выходной мощности на первый силовой агрегат, а второй выходной мощности - на второй силовой агрегат.
4. Система транспортных средств типа автопоезда по п.3, отличающаяся тем, что первая выходная мощность существенно меньше, чем вторая выходная мощность.
5. Система транспортных средств типа автопоезда по п.3, отличающаяся тем, что контроллер выполнен с возможностью манипулирования первым угловым положением, по меньшей мере, одного управляемого колеса из первого множества колес, когда данные, принятые от датчика выбора передачи, указывают на выбор передаточного числа заднего хода, где первое угловое положение измеряется относительно продольной оси первого транспортного средства.
6. Система транспортных средств типа автопоезда по п.2, отличающаяся тем, что контроллер выполнен с возможностью манипулирования первым угловым положением, по меньшей мере, одного управляемого колеса из первого множества колес, когда данные, принятые от датчика выбора передачи указывают на выбор передаточного числа заднего хода, где первое угловое положение измеряется относительно продольной оси первого транспортного средства.
7. Система транспортных средств типа автопоезда по п.1, отличающаяся тем, что контроллер выполнен с возможностью осуществлять при манипулировании вторым механизмом рулевого управления одновременное манипулирование первым механизмом рулевого управления для обеспечения первого углового положения, по меньшей мере, одного управляемого колеса из первого множества колес на основе данных, принятых от датчика входного воздействия по рулевому управлению и датчика выбора передачи, где первое угловое положение измеряется относительно продольной оси первого транспортного средства.
8. Система транспортных средств типа автопоезда по п.1, отличающаяся тем, что первый силовой агрегат осуществляет привод управляемого колеса из первого множества колес.
9. Способ управления системой транспортных средств типа автопоезда, включающей в себя первое транспортное средство, присоединенное выборочно и с возможностью поворота ко второму транспортному средству, где способ содержит:
обнаружение выбора водителем первого транспортного средства одного из:
передаточного числа заднего хода и передаточного числа переднего хода;
обнаружение входного воздействия по рулевому управлению от водителя первого транспортного средства;
определение первой выходной мощности на основе обнаруженного выбора одного из: передаточного числа заднего хода и передаточного числа переднего хода;
определение второй выходной мощности на основе обнаруженного выбора одного из: передаточного числа заднего хода и передаточного числа переднего хода;
определение угла рулевого управления для управляемого колеса, смонтированного с возможностью поворота на втором транспортном средстве, на основе обнаруженного входного воздействия по рулевому управлению, где угол рулевого управления измеряется относительно оси привода второго транспортного средства прямо вперед;
подача сигнала на первый силовой агрегат для привода колеса, смонтированного на первом транспортном средстве, с первой выходной мощностью;
подача сигнала на второй силовой агрегат для привода колеса второго транспортного средства со второй выходной мощностью; и
подача сигнала на механизм рулевого управления, смонтированный на втором транспортном средстве, для размещения управляемого колеса, смонтированного с возможностью поворота на втором транспортном средстве, с определенным углом рулевого управления.
10. Способ управления системой транспортных средств типа автопоезда по п.9, отличающийся тем, что определение второй выходной мощности включает в себя определение второй мощности, равной нулю, когда обнаруживается выбор одного передаточного числа переднего хода.
11. Способ управления системой транспортных средств типа автопоезда по п.9, отличающийся тем, что дополнительно содержит:
обнаружение запроса на скорость от водителя первого транспортного средства, причем
определение первой выходной мощности дополнительно включает в себя определение первой выходной мощности на основе обнаруженного запроса на скорость, когда обнаруживается передаточное число заднего хода, а
определение второй выходной мощности дополнительно включает в себя определение второй выходной мощности на основе обнаруженного запроса на скорость, когда обнаруживается передаточное число заднего хода.
12. Способ управления системой транспортных средств типа автопоезда по п.11, отличающийся тем, что определение первой выходной мощности включает в себя определение первой выходной мощности, существенно меньшей, чем вторая выходная мощность.
13. Способ управления системой транспортных средств типа автопоезда по п.9, отличающийся тем, что:
определение угла рулевого управления включает в себя определение угла рулевого управления, когда обнаруживается передаточное число заднего хода; а
подача сигнала на механизм рулевого управления включает в себя подачу сигнала на механизм рулевого управления, когда обнаруживается передаточное число заднего хода.
14. Способ управления системой транспортных средств типа автопоезда по п.9, отличающийся тем, что дополнительно содержит:
снабжение системы транспортных средств типа автопоезда камерой и монитором, причем такими, чтобы входное воздействие по рулевому управлению от водителя первого транспортного средства было основано на просмотре монитора водителем.
15. Способ управления системой транспортных средств типа автопоезда по п.9, отличающийся тем, что дополнительно содержит:
определение угла рулевого управления для управляемого колеса, смонтированного с возможностью поворота на первом транспортном средстве, на основе обнаруженного входного воздействия по рулевому управлению, где угол рулевого управления измеряется относительно продольной оси первого транспортного средства; и
подачу сигнала на механизм рулевого управления, смонтированный на первом транспортном средстве, для размещения управляемого колеса, смонтированного с возможностью поворота на первом транспортном средстве, с определенным углом рулевого управления, причем подача сигнала на механизм рулевого управления, смонтированный на первом транспортном средстве, происходит одновременно с подачей сигнала на механизм рулевого управления второго транспортного средства.
16. Прицеп для использования в системе транспортных средств типа автопоезда, которая включает в себя транспортное средство, имеющее множество колес транспортного средства с, по меньшей мере, одним из множества колес транспортного средства, смонтированным с возможностью поворота на транспортном средстве, силовой агрегат транспортного средства, имеющий передаточное число заднего хода и множество передаточных чисел переднего хода для привода, по меньшей мере, одного из: множество колес транспортного средства, датчик входного воздействия по рулевому управлению, выполненный с возможностью вывода данных, указывающих на намеченное направление рулевого управления, введенное водителем транспортного средства, и датчик выбора передачи, выполненный с возможностью вывода данных, указывающих на выбор передаточного числа заднего хода, где прицеп содержит:
сцепку в сборе, выполненную с возможностью присоединения-отсоединения прицепа от транспортного средства и обеспечения поворота прицепа относительно транспортного средства, когда сцепка в сборе присоединена к транспортному средству;
множество колес прицепа, смонтированных на прицепе, где множество колес прицепа включают в себя, по меньшей мере, одно управляемое колесо прицепа, присоединенное с возможностью поворота к прицепу;
силовой агрегат прицепа, выполненный с возможностью привода, по меньшей мере, одного из множества колес прицепа;
механизм рулевого управления прицепа, присоединенный, по меньшей мере, к одному управляемому колесу прицепа для поворота, по меньшей мере, одного управляемого колеса прицепа;
контроллер, выполненный с возможностью электрического соединения с каждым из: силовым агрегатом, силовым агрегатом прицепа, датчиком входного воздействия по рулевому управлению и датчиком выбора передачи, обеспечиваемого, когда сцепка в сборе присоединена к транспортному средству, причем контроллер также выполнен с возможностью
манипулирования реакцией силового агрегата транспортного средства и реакцией силового агрегата прицепа на основе данных, принятых от датчика выбора передачи, когда сцепка в сборе присоединена к транспортному средству, и
манипулирования механизмом рулевого управления прицепа для обеспечения углового положения, по меньшей мере, одного управляемого колеса прицепа на основе данных, принятых от датчика входного воздействия по рулевому управлению и датчика выбора передачи, где угловое положение измеряется относительно оси привода прицепа прямо вперед.
17. Прицеп системы транспортных средств типа автопоезда по п.16, отличающийся тем, что контроллер выполнен с возможностью определения потребности по общей выходной мощности на основе данных, принятых от датчика положения педали, определения первой выходной мощности и второй выходной мощности, где сумма первой выходной мощности и второй выходной мощности практически равна общей выходной мощности, и подачи сигналов первой выходной мощности на первый силовой агрегат, а второй выходной мощности - на второй силовой агрегат.
18. Прицеп системы транспортных средств типа автопоезда по п.17, отличающийся тем, что контроллер выполнен с возможностью подачи сигнала первой выходной мощности, меньшей, чем вторая выходная мощность.
19. Прицеп системы транспортных средств типа автопоезда по п.16, отличающийся тем, контроллер выполнен с возможностью манипулирования угловым положением, по меньшей мере, одного управляемого колеса прицепа, когда данные, принятые от датчика выбора передачи, указывают на выбор передаточного числа заднего хода, где угловое положение измеряется относительно оси привода прицепа прямо вперед.
20. Прицеп системы транспортных средств типа автопоезда по п.16, отличающийся тем, что множество колес прицепа состоит из двух колес прицепа, а конструкция для монтажа, выполненная с возможностью монтажа двух колес прицепа на транспортном средстве, состоит из единственной оси прицепа.
| US 5329451 A, 12.07.1994 | |||
| US 2007193795 A1, 23.08.2007 | |||
| US 2001003393 A1, 14.06.2001 | |||
| US 5244226 A, 14.09.1993 | |||
| WO 8503263 A1, 01.08.1985 | |||
| ОХРАННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2229398C1 |

