УРОВЕНЬ ТЕХНИКИ
Определение точного плана маршрута для сельскохозяйственной машины на сельскохозяйственном поле может позволить подобрать убранную массу эффективным образом, например, с точки зрения продолжительности времени, которое занимает операция, и количества топлива, используемого машиной. В некоторых применениях, сельскохозяйственные машины могут работать автономно, используя такой план маршрута.
сущностЬ изобретения
В соответствии с первым аспектом изобретения, обеспечена система, содержащая: контроллер, связанный с сельскохозяйственным транспортным средством, причем контроллер выполнен с возможностью: приема данных другого транспортного средства, которые являются характерными для другого транспортного средства, которое находится на сельскохозяйственном поле; и определения данных плана маршрута, которые являются характерными для маршрута, принимаемого сельскохозяйственным транспортным средством на сельскохозяйственном поле, на основе данных другого транспортного средства.
Контроллер может быть выполнен с возможностью определения данных плана маршрута таким образом, что сельскохозяйственное транспортное средство будет избегать другого транспортного средства.
Данные другого транспортного средства могут содержать данные маршрута другого транспортного средства, которые являются характерными для маршрута, принимаемого другим транспортным средством.
Данные другого транспортного средства могут содержать данные размера другого транспортного средства, которые являются характерными для размера и/или формы другого транспортного средства.
Данные другого транспортного средства могут содержать данные местоположения другого транспортного средства, которые являются характерными для местоположения другого транспортного средства.
Данные местоположения другого транспортного средства могут содержать одно или более из: данных прошлого местоположения другого транспортного средства, которые представляют предыдущее местоположение другого транспортного средства; данных текущего местоположения другого транспортного средства, которые являются характерными для текущего местоположения другого транспортного средства; и данных будущего местоположения транспортного средства, которые являются характерными для будущего местоположения другого транспортного средства.
Данные другого транспортного средства могут содержать данные скорости другого транспортного средства, которые являются характерными для скорости другого транспортного средства.
Данные другого транспортного средства могут содержать данные направления другого транспортного средства, которые являются характерными для направления движения другого транспортного средства.
Контроллер может быть дополнительно выполнен с возможностью: приема полевых данных, которые являются характерными для убранной массы, которая подлежит подбору с сельскохозяйственного поля сельскохозяйственным транспортным средством; и определять данные плана маршрута также на основе полевых данных.
Контроллер может быть выполнен с возможностью получения обновленных полевых данных, когда сельскохозяйственная машина подбирает убранную массу с сельскохозяйственного поля.
Контроллер может быть выполнен с возможностью определения данных плана маршрута путем модификации прежнего плана маршрута, в то время как сельскохозяйственное транспортное средство используется на сельскохозяйственном поле.
Пресс–подборщик может иметь значение приоритета пресс–подборщика, связанное с ним. Другое транспортное средство может иметь значение приоритета другого транспортного средства, связанное с ним. Контроллер может быть выполнен с возможностью: сравнения значения приоритета пресс–подборщика со значением приоритета другого транспортного средства и модифицирования прежнего плана маршрута, только если значение приоритета пресс–подборщика представляет более низкий приоритет, чем значение приоритета другого транспортного средства.
Контроллер может быть выполнен с возможностью определения инструкций управления транспортным средством для сельскохозяйственного транспортного средства, на основе данных плана маршрута.
Инструкции управления транспортным средством могут содержать инструкции управления направлением транспортного средства для автоматического управления направлением движения сельскохозяйственного транспортного средства.
Инструкции управления транспортным средством могут дополнительно содержать инструкции скорости на маршруте для автоматического управления скоростью сельскохозяйственного транспортного средства в местоположениях вдоль маршрута.
Система может дополнительно содержать: беспилотное транспортное средство, выполненное с возможностью получения: полевых данных, которые являются характерными для сельскохозяйственного поля, на котором имеется другое транспортное средство; и данных местоположения на поле, связанных с полевыми данными. Контроллер может быть выполнен с возможностью определения данных другого транспортного средства на основе полевых данных и данных местоположения на поле.
Контроллер может быть дополнительно выполнен с возможностью: определения данных размера другого транспортного средства, которые являются характерными для размера другого транспортного средства, на основе полевых данных; и определять данные плана маршрута также на основе данных размера другого транспортного средства.
Данные плана маршрута могут быть характерными для маршрута, принимаемого сельскохозяйственным транспортным средством для всей необработанной части сельскохозяйственного поля.
Система может дополнительно содержать сельскохозяйственное транспортное средство, которое выполнено с возможностью работы в соответствии с инструкциями управления транспортным средством. Сельскохозяйственное транспортное средство может представлять собой пресс–подборщик.
Может быть обеспечена компьютерная программа, которая, при запуске на компьютере, побуждает компьютер конфигурировать любое устройство, включая контроллер, процессор, машину, транспортное средство или устройство, раскрытое в настоящем документе, или выполнять любой способ, описанный в настоящем документе. Компьютерная программа может быть программной реализацией, и компьютер может рассматриваться как любое соответствующее аппаратное средство, включающее в себя цифровой сигнальный процессор, микроконтроллер и реализацию в постоянной памяти (ROM), стираемой программируемой постоянной памяти (EPROM) или электронно–стираемой программируемой постоянной памяти (EEPROM), в качестве неограничивающих примеров.
Компьютерная программа может быть обеспечена на считываемом компьютером носителе, который может представлять собой физический считываемый компьютером носитель, такой как диск или устройство памяти, или может быть воплощен как переходный сигнал. Такой переходный сигнал может представлять собой сетевую загрузку, в том числе интернет–загрузку.
Краткое описание чертежей
Варианты осуществления настоящего изобретения будут описаны далее в качестве примера и со ссылкой на прилагаемые чертежи, на которых:
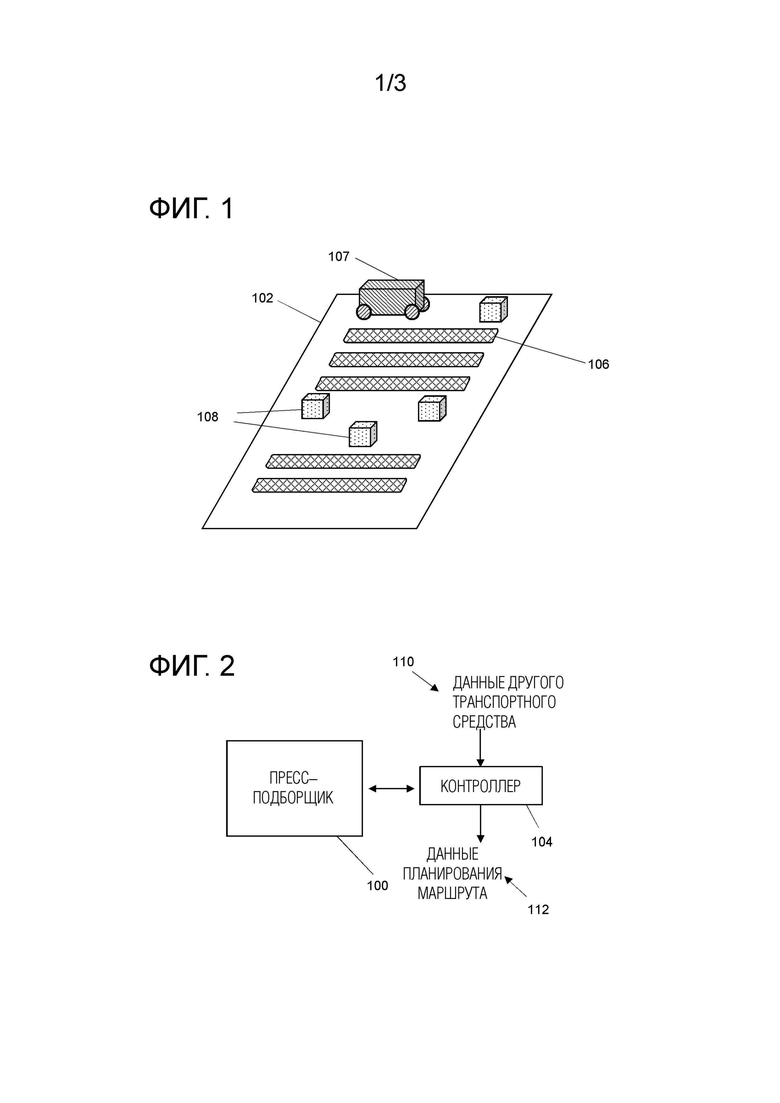
Фиг. 1 показывает пример сельскохозяйственного поля;
Фиг. 2 схематично показывает систему, которая связана с определением маршрута для сельскохозяйственного транспортного средства, чтобы следовать ему на сельскохозяйственном поле;
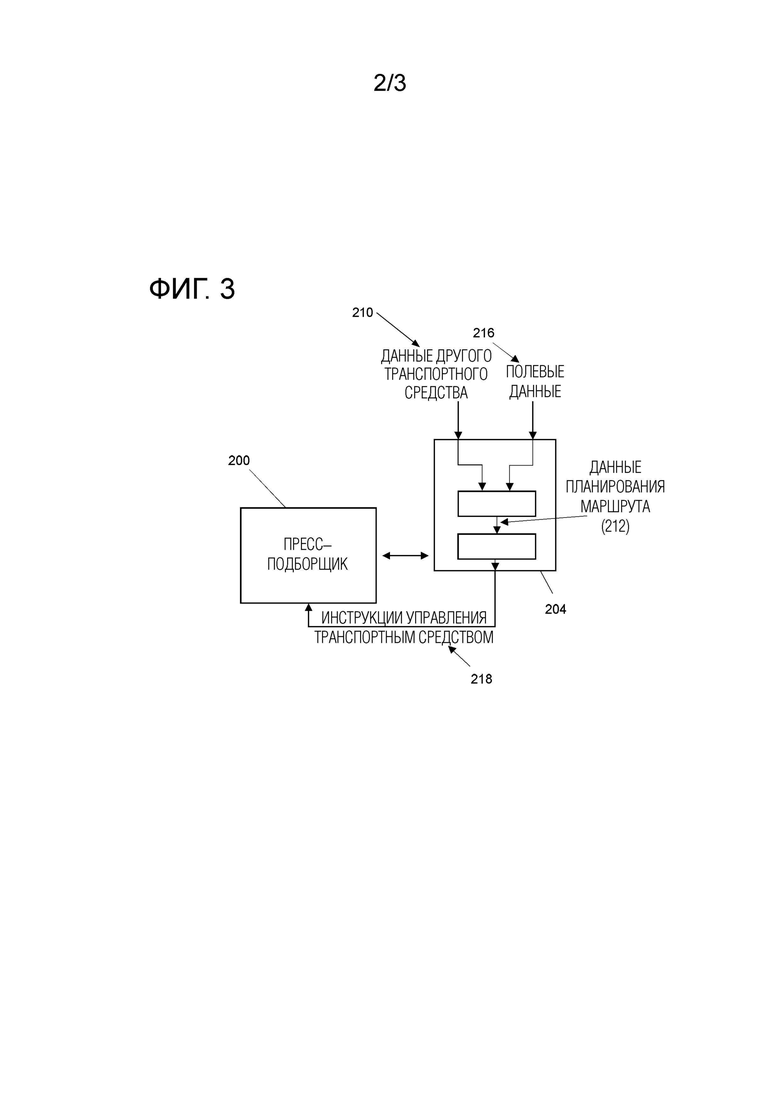
Фиг. 3 схематично показывает другую систему, которая связана с определением маршрута, которому может следовать пресс–подборщик на сельскохозяйственном поле; и
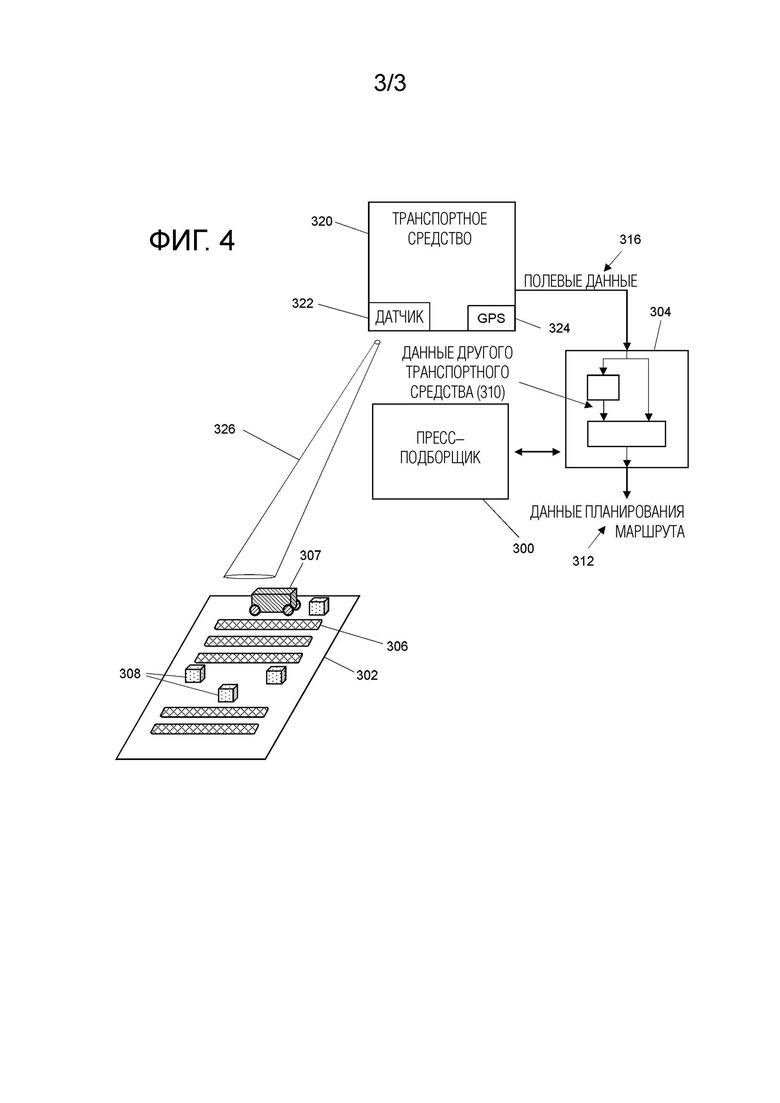
Фиг. 4 схематично показывает другую систему, которая связана с определением маршрута для подборщика, чтобы следовать ему на сельскохозяйственном поле.
Подробное описание ИЗОБРЕТЕНИЯ
Фиг. 2 схематично показывает систему, которая связана с определением маршрута для сельскохозяйственного транспортного средства, чтобы следовать ему на сельскохозяйственном поле 102, как показано на фиг. 1. В этом примере, сельскохозяйственное транспортное средство представляет собой пресс–подборщик 100. Система включает в себя контроллер 104, который связан с пресс–подборщиком 100. Следует иметь в виду, что контроллер 104 может быть расположен на пресс–подборщике 100 или удаленно от пресс–подборщика 100. Например, функциональность контроллера 104 может быть выполнена на удаленном сервере, например, “в облаке”.
Поле 102 включает в себя ряды убранной массы, которые могут представлять собой сено, солому или подобные продукты, которые были оставлены в поле 102 в форме валка 106. Валки 106 представляют собой удлиненные ряды соответствующих продуктов, которые насыпаны в кучу в центре поперечника и выравниваются на соответствующих краях поперечника. Как правило, поле 102, после уборки урожая, содержит много по существу параллельных друг другу валков 106, как показано на фиг. 1. Эти валки отстоят друг от друга на практически постоянные промежутки. Убранная масса в валках 106 может быть подобрана пресс–подборщиком 100, а затем размещена на поле 102 как тюки 108. Поле 102, которое показано на фиг. 1, было частично обработано, при этом оно включает в себя как ряды валков 106 для прессования в тюки, так и готовые тюки 108.
Следует иметь в виду, что более чем одна сельскохозяйственная машина может работать в поле 102 одновременно. Например: множество пресс–подборщиков может одновременно работать в поле 102; или трактор с прицепом для сбора тюков 108 может находиться в поле 102 одновременно с пресс–подборщиком 100. Один или более контроллеров 104, раскрытых здесь, могут определять маршрут для сельскохозяйственной машины (такой, как пресс–подборщик 100 на фиг. 1), который учитывает информацию о другом транспортном средстве 107, которое находится в поле 102. Это может уменьшить вероятность столкновения сельскохозяйственной машины с другим транспортным средством 107.
Контроллеры, раскрытые здесь, могут быть также использованы с сельскохозяйственными машинами, которые не являются пресс–подборщиками. Например, сельскохозяйственная машина может быть трактором, кормоуборочным комбайном, зерноуборочным комбайном или теле–манипулятором для сбора тюков, и контроллер 104 может планировать маршрут для сельскохозяйственной машины таким образом, что он принимает во внимание информацию о любом другом транспортном средстве 107, которое находится в поле 102 или будет находиться в поле 102 в то же самое время, что и сельскохозяйственная машина.
В некоторых вариантах осуществления, контроллер (который может быть или не быть контроллером 104, связанным с пресс–подборщиком 100, как это показано на фиг. 2) может быть использован для определения данных 112 плана первоначального маршрута 112 на основе данных 10 другого транспортного средства, которые являются характерными для другого транспортного средства 107, которое будет находиться на сельскохозяйственном поле 102 одновременно с пресс–подборщиком 110. Таким образом, данные 112 плана маршрута могут быть определены, прежде чем пресс–подборщик 100 и/или другое транспортное средство 107 войдет на поле 102.
При необходимости, по меньшей мере пресс–подборщик 100 и другое транспортное средство 107 могут иметь значения приоритета, связанные с ними, так что иерархия может быть использована при определении планов маршрута для транспортных средств. В одном примере, данные валков доступны для поля 102 до начала операции прессования (например, как получено беспилотным летательным аппаратом (дроном), как будет описано ниже). Затем, контроллер 104, связанный с ‘ведущей’ машиной (транспортным средством, которое имеет наивысший приоритет), может определить данные плана маршрута для всех машин/ транспортных средств перед началом их работы в поле 102. Если данные полного валка не доступны, то, в некоторых примерах, контроллер может использовать информацию, характерную для местоположений концов валка 106, а затем прогнозировать данные местоположения валка, характерные для местоположений валка. В некоторых примерах, местоположения концов валка могут быть обнаружены во время прессования в тюки полосы пашни. Следует иметь в виду, что любые полевые данные, которые характерны для сельскохозяйственного поля, которое должно обрабатываться пресс–подборщиком 100 (или любым другим сельскохозяйственным транспортным средством), могут использоваться контроллером 104 для определения данных плана маршрута для множества сельскохозяйственных транспортных средств, при необходимости также с использованием значений приоритета, связанных с каждым из сельскохозяйственных транспортных средств.
Такое первоначальное планирование может быть выполнено контроллером, связанным с ‘ведущим’ транспортным средством или координирующим контроллером, который может находиться в облаке или может быть связан с дроном, в качестве не ограничивающих примеров.
Контроллер 104 может, при необходимости, при выполнении такой начальной фазы планирования, использовать данные пользовательских предпочтений для определения данных плана маршрута. В некоторых примерах, контроллер 104 может при необходимости использовать данные пользовательских предпочтений, которые связаны с ‘ведущей’ машиной/транспортным средством.
В некоторых вариантах осуществления, контроллер 104, связанный с пресс–подборщиком 100, принимает данные 110 другого транспортного средства, которые являются характерными для другого транспортного средства 107, которое находится в сельскохозяйственном поле 102, и определяет данные 112 плана маршрута.
Как будет обсуждено более подробно ниже, данные 110 другого транспортного средства могут включать в себя одно или более из: данных маршрута другого транспортного средства, данных размера другого транспортного средства, данных местоположения другого транспортного средства, данных скорости другого транспортного средства и данных направления другого транспортного средства. Данные 112 плана маршрута являются характерными для маршрута, принимаемого пресс–подборщиком 100 на сельскохозяйственном поле, на основе данных 110 другого транспортного средства. Как будет подробно обсуждаться ниже, такая обработка может позволить адаптировать план маршрута для пресс–подборщика 100 в реальном времени, в то время как пресс–подборщик 100 находится в поле 102, чтобы избежать другого транспортного средства 107.
В некоторых примерах, контроллер 104 может определять данные 112 плана маршрута путем модифицирования прежнего плана маршрута, в то время как пресс–подборщик 100 используется в поле 102. Например, первоначальный план маршрута может генерироваться для пресс–подборщика 100, чтобы подбирать валки 106 убранной массы. Однако, когда этот первоначальный план маршрута генерируется, может оказаться невозможным точно определить, где будут находиться другие транспортные средства 107, в то время как пресс–подборщик 100 следует по первоначальному маршруту.
Данные 112 плана маршрута могут содержать последовательность местоположений для пресс–подборщика 100, чтобы проходить при подборке убранной массы в валках 106. Например, контроллер 104 может определить кратчайший возможный маршрут для подборки всей убранной массы, избегая при этом встречи с другим транспортным средством 107 в поле 102.
В примерах, где трактор тянет за собой пресс–подборщик 100, данные 112 плана маршрута могут включать в себя данные плана маршрута пресс–подборщика и данные плана маршрута трактора. Таким образом, контроллер 104 может гарантировать, что как пресс–подборщик 100, так и трактор избегают встречи с другим транспортным средством 107. Может потребоваться обеспечивать только данные плана маршрута трактора в качестве выхода, потому что именно эти данные могут быть использованы оператором для управления трактором таким образом, что пресс–подборщик 100 следует нужному маршруту. В качестве альтернативы, трактор может управляться автономно с использованием данных плана маршрута трактора таким образом, что пресс–подборщик 100 следует нужному маршруту. Следует понимать, что любое описание здесь относительно управления пресс–подборщиком 100 может в равной степени применяться к управлению трактором, который тянет пресс–подборщик 100 (или к управлению любой другой сельскохозяйственной машиной). Это объясняется тем, что любое такое управление трактором может рассматриваться как косвенное управление пресс–подборщиком 100.
Данные 112 плана маршрута могут быть характерными для маршрута, который подлежит принятию пресс–подборщиком 100/трактором для всей части поля 112, на которой не была выполнена обработка/прессование в тюки. То есть, данные 112 плана маршрута могут быть определены таким образом, что принимаются во внимание части поля 102, для которых уже было выполнено прессование в тюки, гарантируя при этом, что маршрут планируется для прессования в тюки убранной массы в каждом из остальных валков 106.
В некоторых примерах, контроллер 104 может определять данные плана маршрута таким образом, что пресс–подборщик 100 будет избегать встречи с другим транспортным средством 107.
Данные 110 другого транспортного средства могут быть получены от другого транспортного средства 107 на сельскохозяйственном поле или от любого процессора, связанного с другим транспортным средством 107, например, удаленного процессора, который автономно управляет другим транспортным средством 107. В некоторых примерах, связь между транспортными средствами может быть использована для передачи данных между пресс–подборщиком 100 и другим транспортным средством 107. Эта связь может быть прямой или через “облако”.
Данные другого транспортного средства могут включать в себя данные маршрута другого транспортного средства, которые являются характерными для маршрута, принимаемого другим транспортным средством 107. Это может быть первоначальным маршрутом, который был запланирован для другого транспортного средства 107, или может быть динамически модифицированным маршрутом для другого транспортного средства 107. Таким образом, относительно долгосрочные прогнозы и планирование могут быть выполнены, например, для охвата длительности сельскохозяйственной операции (которая может представлять собой прессование в тюки). Это может привести к улучшенным/ оптимальным маршрутам для одного или обоих из пресс–подборщика 100 и другого транспортного средства 107.
В некоторых применениях, по меньшей мере пресс–подборщик 100 и другое транспортное средство 107 могут иметь значения приоритета, связанные с ними, так что при определении/модификации планов маршрута для транспортных средств может быть использована иерархия. Например, контроллер 104 может сравнивать значение приоритета пресс–подборщика со значением приоритета другого транспортного средства и модифицировать прежний план маршрута для пресс–подборщика 100, только если значение приоритета пресс–подборщика представляет собой более низкий приоритет, чем значение приоритета другого транспортного средства. Если значение приоритета пресс–подборщика представляет собой более высокий приоритет по сравнению со значением приоритета другого транспортного средства, то контроллер 104 может не модифицировать существующий план маршрута для пресс–подборщика 100 на том основании, что вместо этого, как ожидается, будет изменен план маршрута для другого транспортного средства 107. В примерах, где другое транспортное средство 107 также является пресс–подборщиком, описанная функциональность может обеспечивать возможность генерирования эффективных маршрутов, так что несколько пресс–подборщиков смогут работать одновременно в поле 102.
В некоторых примерах, данные 110 другого транспортного средства включают в себя данные местоположения другого транспортного средства, которые являются характерными для местоположения другого транспортного средства 107. Данные местоположения другого транспортного средства могут включать в себя одно или более из: (i) данных прошлого местоположения другого транспортного средства, которые являются характерными для предыдущего местоположения другого транспортного средства 107; (ii) данных текущего местоположения другого транспортного средства, которые являются характерными для текущего местоположения другого транспортного средства 107; и (iii) данных будущего местоположения другого транспортного средства, которые являются характерными для ожидаемого будущего местоположения другого транспортного средства 107. Контроллер 104 может при необходимости определить такие данные местоположения другого транспортного средства путем обработки данных плана маршрута другого транспортного средства, которые являются характерными для маршрута, который подлежит принятию или принимается другим транспортным средством 107 в поле 102. В некоторых примерах, данные местоположения другого транспортного средства, особенно данные прошлого местоположения другого транспортного средства и/или данные текущего местоположения другого транспортного средства могут быть обеспечены системой определения местоположения (например, приемником GPS), связанной с другим транспортным средством 107.
Контроллер 104 может обрабатывать данные начального времени маршрута другого транспортного средства, которые являются характерными для начального времени другого транспортного средства 107, следующего по своему текущему маршруту, чтобы определить данные текущего местоположения другого транспортного средства и/или данные будущего местоположения другого транспортного средства. Таким образом, временные метки другого транспортного средства могут быть связаны с данными текущего местоположения другого транспортного средства и/или с конкретными местоположениями, которые представлены данными будущего местоположения другого транспортного средства.
Контроллер 104 может затем определить данные 112 плана маршрута на основе данных местоположения другого транспортного средства. Например, контроллер 104 может определить последовательность местоположений, которые пресс–подборщик 100 будет занимать в будущем, и связанные значения временных меток сельскохозяйственного транспортного средства, когда оно следует текущему плану маршрута. Контроллер 104 может затем сравнивать эту информацию с временными метками другого транспортного средства, которые связаны с данными будущего местоположения другого транспортного средства. Если контроллер 104 определяет, что разность между местоположениями пресс–подборщика 100 и другого транспортного средства 107 меньше, чем пороговая разность в любой будущий момент времени, то контроллер 104 может определить данные плана нового маршрута путем модифицирования текущего/прежнего плана маршрута таким образом, что, когда пресс–подборщик 100 следует новому плану маршрута, разность между местоположениями пресс–подборщика 100 и другого транспортного средства 107 будет не меньше, чем пороговая разность в любой будущий момент времени. Например, контроллер 104 может определить данные нового плана маршрута путем модифицирования прежнего плана маршрута таким образом, что пресс–подборщик 100 замедляется при следовании той же самой траектории, что и траектория прежнего плана маршрута.
В некоторых примерах, данные другого транспортного средства содержат данные скорости другого транспортного средства, которые являются характерными для скорости другого транспортного средства 107. Данные скорости другого транспортного средства могут включать в себя одно или более из: данных прошлой скорости другого транспортного средства, которые являются характерными для предыдущей скорости другого транспортного средства 107; (ii) данных текущей скорости другого транспортного средства, которые являются характерными для текущей скорости другого транспортного средства 107; и (iii) данных будущей скорости другого транспортного средства, которые являются характерными для ожидаемой будущей скорости другого транспортного средства 107. Контроллер 104 может при необходимости определять такие данные скорости другого транспортного средства путем обработки данных плана маршрута другого транспортного средства, которые являются характерными для маршрута, который подлежит принятию или принимается другим транспортным средством 107 в поле 102, и скорости, которую другое транспортное средство 107 предполагает иметь в различных точках вдоль маршрута. Контроллер 104 может также обрабатывать данные начального времени другого транспортного средства, чтобы определить данные текущей скорости другого транспортного средства и/или данные будущей скорости другого транспортного средства в различных точках во времени в будущем. В некоторых примерах, данные скорости другого транспортного средства, особенно данные прошлой скорости другого транспортного средства и/или данные текущей скорости другого транспортного средства могут быть обеспечены с помощью спидометра или системы определения местоположения, связанной с другим транспортным средством 107.
При необходимости, контроллер 104 может обрабатывать данные прошлой скорости другого транспортного средства и данные текущей скорости другого транспортного средства, чтобы статистически прогнозировать данные будущей скорости другого транспортного средства. Например, если другое транспортное средство 107 движется с той же скоростью в течение порогового периода времени, то контроллер 104 может прогнозировать, что другое транспортное средство 107 будет продолжать движение с этой скоростью и, следовательно, относить историческое значение скорости к данным будущей скорости другого транспортного средства.
Контроллер 104 может обрабатывать данные скорости другого транспортного средства, чтобы определить данные будущего местоположения другого транспортного средства. Таким образом, контроллер 104 может определить данные 112 плана маршрута на основе, прямо или косвенно, данных скорости другого транспортного средства.
В некоторых примерах, данные другого транспортного средства содержат данные направления другого транспортного средства, которые являются характерными для направления движения другого транспортного средства 107. Данные направления другого транспортного средства могут включать в себя одни или более из: (i) данных прошлого направления другого транспортного средства, которые являются характерными для предыдущего направления другого транспортного средства 107; (ii) данных текущего направления другого транспортного средства, которые являются характерными для текущего направления другого транспортного средства 107; и (iii) данных будущего направления другого транспортного средства, которые являются характерными для ожидаемого будущего направления другого транспортного средства 107. Контроллер 104 может при необходимости определять такие данные направления другого транспортного средства путем обработки данных плана маршрута другого транспортного средства, которые являются характерными для маршрута, который подлежит принятию или принимается другим транспортным средством 107 в поле 102, и направления, которое другое транспортное средство 107 предполагает иметь в различных точках вдоль маршрута. Контроллер 104 может также обрабатывать данные начального времени маршрута другого транспортного средства, чтобы определить данные текущего направления другого транспортного средства и/или данные будущего направления другого транспортного средства в различных точках во времени в будущем. В некоторых примерах, данные направления другого транспортного средства, особенно данные прошлого направления другого транспортного средства и/или данные текущего направления другого транспортного средства, могут быть предоставлены гироскопом или системой определения местоположения, связанной с другим транспортным средством 107.
При необходимости, контроллер 104 может обрабатывать данные прошлого направления другого транспортного средства и данные текущего направления другого транспортного средства, чтобы статистически прогнозировать данные будущего направления другого транспортного средства. Например, если другое транспортное средство 107 движется в том же направлении в течение порогового периода времени, то контроллер 104 может прогнозировать, что другое транспортное средство 107 будет продолжать движение в этом направлении и, следовательно, относить историческое значение направления данным будущего направления другого транспортного средства.
Контроллер 104 может обрабатывать данные направления другого транспортного средства, чтобы определять данные будущего местоположения другого транспортного средства. Таким образом, контроллер 104 может определять данные 112 плана маршрута на основе, прямо или косвенно, данных направления другого транспортного средства.
В некоторых примерах, данные другого транспортного средства содержат данные размера другого транспортного средства, которые являются характерными для размера и/или формы другого транспортного средства. Данные размера другого транспортного средства могут быть фиксированными/жестко закодированными для конкретного типа другого транспортного средства 107 или они могут определяться с использованием одного или нескольких датчиков. В таких примерах, контроллер 104 может определять данные местоположения другого транспортного средства как множественный набор координат для другого транспортного средства 107. Множественный набор координат может быть характерным, например, для местоположений одного или нескольких углов другого транспортного средства 107 и может быть достаточным, чтобы вместе они могли быть использованы для определения периметра двумерного следа другого транспортного средства 107 (если смотреть сверху) или для определения периметра трехмерного объема другого транспортного средства 107.
Контроллер 104 может определить несколько наборов координат путем применения смещений к местоположению другого транспортного средства 107 (данным местоположения другого транспортного средства) в любой точке вдоль маршрута, которому должно следовать другое транспортное средство 107. Контроллер 104 может определять смещения на основе данных размера другого транспортного средства.
Контроллер 104 может затем определять данные 112 плана маршрута на основе данных размера другого транспортного средства, при необходимости в комбинации с данными местоположения другого транспортного средства.
Поэтому, данные другого транспортного средства могут включать в себя данные, относящиеся к одному или нескольким из местоположения, размеров, путевой скорости и планируемого маршрута (желательной траектории) другого транспортного средства, если таковые имеются. В некоторых примерах, данные другого 110 транспортного средства могут быть определены из данных датчика, которые получены от датчика, который контролирует другое транспортное средство 107. Например, беспилотный летательный аппарат может получать данные изображения с использованием камеры, чтобы движение другого транспортного средства 107 могло контролироваться.
Фиг. 3 схематично показывает другую систему, которая связана с определением маршрута, которому может следовать пресс–подборщик 200 на сельскохозяйственном поле (как показано на фиг. 1). Система включает в себя контроллер 204 и пресс–подборщик 200. Контроллер 204 может использоваться, чтобы автономно управлять пресс–подборщиком 200 (или трактором, который тянет пресс–подборщик 200). То есть, система может рассматриваться как включающая в себя пресс–подборщик 200, который выполнен с возможностью работы в соответствии с инструкциями управления транспортным средством.
В этом примере, контроллер 204 принимает данные 210 другого транспортного средства и полевые данные 216 и определяет данные 212 плана маршрута на основе данных 210 другого транспортного средства и полевых данных 216, как будет описано ниже.
Контроллер 204 определяет инструкции 218 управления транспортным средством для пресс–подборщика 200 на основе данных 212 плана маршрута. Инструкции 218 управления транспортным средством могут содержать инструкции управления направлением транспортного средства для автоматического управления направлением движения пресс–подборщика 200, так что пресс–подборщик 200 следует конкретному маршруту через сельскохозяйственное поле. Таким образом, пресс–подборщик 200 может управляться автономно, так что он следует конкретному маршруту через сельскохозяйственное поле, чтобы подбирать убранную массу с поля. Дополнительно или вместо избегания встречи с другим транспортным средством, которое находится в поле, как описано выше, маршрут может планироваться так, что он обеспечивает одно или более преимуществ, например:
(i) эффективное использование пресс–подборщика/трактора, например, низкое общее потребление топлива при подборе и прессовании в тюки всей убранной массы с поля;
(ii) эффективное прессование в тюки с точки зрения времени, требуемого, чтобы прессовать в тюки всю убранную массу в поле; и
(iii) приоритизация подбора убранной массы с конкретными характеристиками (как определено данными о свойствах сельскохозяйственной культуры, например, как будет обсуждено ниже), такими как части валка, которые имеют высокий объем убранной массы.
В некоторых примерах, контроллер 204 может также использовать данные местоположения пресс–подборщика и/или данные направления пресс–подборщика, которые являются характерными для текущего местоположения и направления движения пресс–подборщика 200, для которого определяется план маршрута, чтобы определить данные 212 плана маршрута.
Инструкции управления транспортным средством могут также содержать инструкции скорости на маршруте для автоматического управления скоростью пресс–подборщика 200 в местоположениях вдоль маршрута. Например, инструкции управления транспортным средством могут также содержать инструкции управления направлением транспортного средства и инструкции скорости на маршруте, так что пресс–подборщик 200 может совершать поворот в поле с желательным углом поворота, на подходящей скорости для поворота, так что пресс–подборщик 200 избегает другого транспортного средства, которое находится в поле.
Как указано выше, в этом примере, контроллер 204 также принимает полевые данные 216, которые являются характерными для сельскохозяйственного поля, которое подлежит обработке пресс–подборщиком 200. Например, полевые данные 216 являются характерными для валков убранной массы, которые требуется подобрать с поля пресс–подборщиком. В одном примере, полевые данные 216 могут быть характерными для местоположения валков убранной массы, которые еще требуется прессовать в тюки. Полевые данные 216 могут также быть характерными для одного или нескольких свойств валков убранной массы. В некоторых примерах, контроллер 204 принимает обновленные полевые данные 216 по мере того, как пресс–подборщик 200 подбирает убранную массу с поля.
Контроллер 204 может определять данные 212 плана маршрута также на основе полевых данных 216. Таким образом, местоположения одного или нескольких других транспортных средств и свойства не прессованных в тюки валков (такие как местоположения валков) могут использоваться, чтобы определять данные 212 плана маршрута. В других примерах, полевые данные 216 могут использоваться, чтобы определять данные 210 другого транспортного средства, как будет обсуждено подробно ниже со ссылкой на фиг. 4.
В некоторых примерах, любой контроллер, раскрытый здесь, может определять данные плана маршрута, так что сельскохозяйственное транспортное средство выбирает путь, который имеет предопределенное отношение с маршрутом другого транспортного средства. В одном примере, контроллер может определять данные плана маршрута, так что сельскохозяйственное транспортное средство следует по пути (по меньшей мере в течение порогового расстояния/времени), который параллелен и разнесен на предопределенное расстояние от пути, по которому должно следовать другое транспортное средство. Например, маршрут может планироваться так, что материал или топливо могут переноситься (перегружаться) между сельскохозяйственным транспортным средством и другим транспортным средством. Такие примеры могут быть особенно подходящими для зерноуборочных и кормоуборочных комбайнов или любого другого сельскохозяйственного транспортного средства, которое переносит убранную массу между транспортными средствами, включая контейнеры, которые буксируются транспортными средствами. В одном конкретном примере, первый зерноуборочный комбайн может разгружаться во второй зерноуборочный комбайн рядом с ним, и второй зерноуборочный комбайн затем разгружается в грузовик. Такие примеры могут извлекать выгоду из данных плана маршрута, определяемых для двух или нескольких транспортных средств, так что это учитывает данные другого транспортного средства.
Возможная стратегия управления может состоять в том, чтобы разделять поле на зоны, затем выделять разные зоны разным машинам. Другая стратегия может состоять в том, чтобы поддерживать машины близко друг к другу, например, на больших полях может быть неэффективным для множества машин/транспортных средств находиться на большом расстоянии друг от друга. Поэтому, данные плана маршрута могут определяться для множества сельскохозяйственных транспортных средств, так что расстояние между их мгновенными местоположениями во время следования по маршрутам меньше, чем пороговое расстояние. Таким образом, можно сказать, что транспортное средство выбирает путь, который имеет предопределенное отношение с маршрутом другого транспортного средства.
Фиг. 4 схематично показывает другую систему, которая связана с определением маршрута для пресс–подборщика 300 для следования на сельскохозяйственном поле 302. Элементы на фиг. 4, которые также показаны на фиг. 2 или фиг. 3, обозначены соответствующими ссылочными позициями в ‘300–серии’, и они не обязательно будут описаны снова здесь.
Система включает в себя транспортное средство 320. В этом примере, транспортное средство представляет собой беспилотное транспортное средство 320. Беспилотное транспортное средство 320 может представлять собой беспилотный летательный аппарат (иногда называемый дроном). В других примерах, транспортное средство 320 может представлять собой наземное транспортное средство, которое может быть или не быть беспилотным.
Беспилотное транспортное средство 320 может включать в себя один или более датчиков для получения полевых данных 316. Поле обзора 326 такого датчика схематично показано на фиг. 4.
В этом примере, беспилотное транспортное средство 320 включает в себя датчик 322, который может получать полевые данные 316. В этом примере датчик 322 представляет собой камеру, которая может получать данные изображения поля. Данные изображения поля могут представлять собой данные двумерного изображения или данные трехмерного изображения, и в некоторых примерах камера может представлять собой 3D–сканер или 3D–камеру.
Альтернативно или дополнительно, полевые данные 316 могут включать в себя: радиолокационные данные поля, получаемые радиолокатором; оптико–локационные данные поля, получаемые датчиком на основе оптического локатора; данные влажности поля, получаемые датчиком влажности; инфракрасные (IR) данные поля, получаемые инфракрасным датчиком; ультразвуковые данные, получаемые ультразвуковым датчиком, или любой другой тип полевых данных из любого типа датчика, который может получать информацию о сельскохозяйственном поле 302 или убранной массе на сельскохозяйственном поле 302. Контроллер 304 может обрабатывать один или более из этих разных типов полевых данных 316, прямо или косвенно, чтобы определить данные 312 плана маршрута и при необходимости инструкции управления транспортным средством (не показаны).
В некоторых примерах, контроллер 304 может определять данные о свойствах сельскохозяйственной культуры, которые являются характерными для убранной массы на сельскохозяйственном поле 302, на основе (прямо или косвенно) полевых данных 316. Например, контроллер 304 может выполнять алгоритм распознавания объектов на данных изображения поля, чтобы определять один или более типов сельскохозяйственной культуры; длину стеблей в массе, плотность массы и информацию о высоте среза. Высота среза представляет собой высоту, на которой сельскохозяйственная культура срезается. При некоторых условиях, например, для пшеничной соломы, валок лежит поверх срезов, в результате чего валок выглядит большим, чем он есть в действительности.
В некоторых примерах, контроллер 304 может также, или вместо этого, обрабатывать разные типы полевых данных, чтобы определить данные о свойствах сельскохозяйственной культуры. Например, контроллер 304 может обрабатывать полевые IR данные, чтобы определить температуру убранной массы, или контроллер 304 может обрабатывать полевые данные влажности, чтобы определить влажность/увлажненность (сырость) убранной массы.
В одном примере, данные о свойствах сельскохозяйственной культуры могут включать в себя данные о размере массы, которые являются характерными для размера убранной массы на сельскохозяйственном поле 302. Такие данные о размере массы могут включать в себя высоту, ширину, площадь сечения, объем или форму валка 306. Поэтому данные о свойствах сельскохозяйственной культуры могут представлять одномерные, двумерные или трехмерные физические характеристики убранной массы и могут определяться на основе данных двумерного изображения или данных трехмерного изображения.
Контроллер 304 может затем определять данные 312 плана маршрута для пресс–подборщика 300 на основе одного или нескольких вышеуказанных типов данных о свойствах сельскохозяйственной культуры. В некоторых примерах, контроллер 304 определяет инструкции управления транспортным средством для пресс–подборщика 300 на основе одного или нескольких вышеуказанных типов данных о свойствах сельскохозяйственной культуры. Например, контроллер 304 может побуждать пресс–подборщик 300 двигаться: (i) более медленно по большим частям убранной массы (например, частям, которые имеют данные о размере массы (такие как площадь сечения), которые больше, чем пороговое значение размера); (ii) более быстро по тонким частям убранной массы (например, частям, которые имеют плотность, которая меньше, чем пороговое значение плотности), (iii) зигзагообразным путем по очень узким валкам, чтобы достичь хорошей подачи в камеру предварительного сжатия пресс–подборщика 300; и (iv) не изменяя скорость слишком резко (например, так что ускорение/замедление пресс–подборщика 300 не больше, чем порог изменения скорости), если имеется небольшое прерывание валка 306, чтобы улучшить комфорт водителя (например, небольшое прерывание может идентифицироваться как высота валка 306, которая меньше, чем порог высоты валка для длины пути, которая меньше, чем порог длины пути).
Будет понятно, что приведенные выше примеры являются неограничивающими и что пресс–подборщик может автоматически управляться на основе данных о свойствах сельскохозяйственной культуры многочисленными способами. В некоторых примерах, разные опции могут выбираться оператором пресс–подборщика/трактора, например, при начале операции прессования в тюки. Например, в начале обработки поля, оператор может ввести ‘настройку’ следующим образом:
– При попадании на увлажненное место: как контроллер должен управлять пресс–подборщиком/трактором – замедлить скорость и продолжить прессование в тюки или поднять подборщик; и/или
– Если обнаружен сильно сжатый валок: как контроллер должен управлять пресс–подборщиком/трактором – замедлить скорость и продолжить прессование в тюки или поднять подборщик.
Таким образом, контроллер может определять инструкции управления транспортным средством для пресс–подборщика 300 на основе: (i) одного или нескольких вышеуказанных типов данных о свойствах сельскохозяйственной культуры; и (ii) пользовательского ввода.
Поэтому, контроллер 304 может, разными способами, определять инструкции управления транспортным средством и/или данные 312 плана маршрута на основе данных о свойствах сельскохозяйственной культуры. Например, контроллер 304 может планировать маршрут для пресс–подборщика 300, так что области убранной массы с более высокой плотностью подбираются перед областями убранной массы, которые имеют низкую плотность. Это может быть предпочтительным, потому что наиболее ценная убранная масса (с точки зрения объема сельскохозяйственной культуры на расстояние, пройденное пресс–подборщиком 300) подбирается первой. В другом примере, контроллер 304 может планировать маршрут так, что пресс–подборщик 300 подбирает области убранной массы, которые имеют более низкую влажность, перед областями убранной массы, которые имеют более высокую влажность. Таким образом, более влажная убранная масса будет иметь больше времени для высыхания. В качестве дополнительного примера, контроллер 304 может определять данные 312 плана маршрута для пресс–подборщика 300 на основе времени суток, когда убранная масса должна быть подобрана, и/или измеренной или прогнозируемой температуры убранной массы. Может быть предпочтительным, чтобы убранная масса была по возможности холодной для прессования в тюки (для лучших фрикционных свойств). Поэтому, данные 312 плана маршрута могут планироваться так, чтобы убранная масса, которая подбирается, вероятно, была ниже порога температуры для сельскохозяйственной культуры. В качестве еще одного дополнительного примера, контроллер 304 может определять данные плана маршрута для пресс–подборщика 300 на основе влажности/сырости убранной массы, так что влажные участки убранной массы могут прессоваться в тюки один за другим, чтобы не смешивать влажную и сухую убранную массу в одних и тех же тюках.
Контроллер 304 может определять данные свойства поля, которые являются характерными для свойства сельскохозяйственного поля 302, на основе полевых данных 316. Например, контроллер 304 может определять первые области полевых данных, которые соответствуют валкам 306 убранной массы, и вторые области полевых данных, которые соответствуют сельскохозяйственному полю 302 (вне периметра первых областей полевых данных). Как рассмотрено выше, контроллер 304 может определять данные свойства сельскохозяйственной культуры на основе данных, которые соответствуют первым областям полевых данных. Контроллер 304 может также определять данные свойства поля на основе вторых областей и затем определять инструкции управления транспортным средством и/или данные 312 плана маршрута на основе данных свойства поля.
Данные свойства поля могут включать в себя данные влажности поля, которые являются характерными для влажности сельскохозяйственного поля 302. В таком примере, контроллер 304 может обрабатывать полевые данные, чтобы идентифицировать местоположения вторых областей полевых данных, которые соответствуют сельскохозяйственному полю 302, и затем определять данные влажности поля на основе данных влажности поля, получаемых датчиком влажности для идентифицированных вторых областей. Контроллер 304 может затем управлять скоростью пресс–подборщика 300 соответственно, например, чтобы препятствовать перемещению пресс–подборщика 300 быстрее, чем пороговое значение скорости в частях поля 302, которые имеют данные влажности поля, которые превышают пороговое значение влажности.
Данные свойства поля могут также включать в себя данные рельефа поля, которые являются характерными для рельефов сельскохозяйственного поля 302. Пользователь может предоставить данные рельефа поля на контроллер 304 в некоторых примерах, поскольку обнаружение этих данных может рассматриваться как одноразовое задание. В других примерах, контроллер 304 может определять данные рельефа поля, например, на основе данных изображения поля или радиолокационных данных поля. Контроллер 304 может затем определять инструкции управления транспортным средством и/или данные 312 плана маршрута на основе данных рельефа поля. Например, для областей сельскохозяйственного поля 302, которые имеют крутой склон (например, данные рельефа поля, которые являются характерными для наклона, который больше, чем пороговое значение наклона), контроллер 304 может определять инструкции скорости на маршруте для автоматического управления скоростью пресс–подборщика 300, так что она не превышает пороговое значение скорости. Также, при таких обстоятельствах, контроллер 304 может определять инструкции управления направлением транспортного средства, которые предотвращают превышение углом поворота пресс–подборщика 300 порогового значения угла поворота. В качестве другого примера, контроллер 304 может определять данные плана маршрута для пресс–подборщика 300 на основе данных рельефа поля. Например, контроллер 304 может вычислить маршрут, который, для большого валка на склоне, приводит к тому, что пресс–подборщик 300 подбирает убранную массу по мере движения вниз по уклону, имеющему градиент, который больше, чем пороговое значение градиента. Это может обеспечивать преимущества, поскольку в некоторых применениях, трактор, который тянет пресс–подборщик 300, может не иметь достаточной мощности, чтобы поддерживать его оптимальную скорость.
В некоторых примерах, транспортное средство 320 может включать в себя датчик измерения высоты для получения данных высоты массы, характерных для высоты убранной массы. Контроллер 304 может затем определять инструкции управления транспортным средством и/или данные 312 плана маршрута на основе данных высоты массы. Например, контроллер 304 может устанавливать инструкции скорости на маршруте для пресс–подборщика 300 на основе данных высоты массы, так что пресс–подборщик 300 движется медленнее, когда высота убранной массы относительно велика. Измерение высоты может использоваться в качестве указателя размера валка 306. Если множество измерений высоты делается во время движения транспортного средства 320, они могут комбинироваться для получения 3D–скана. Датчик измерения высоты может также использоваться, чтобы измерять информацию о высоте среза, которая является характерной для высоты среза, если плотность срезанных концов достаточно высока. Независимо от того, как определяется высота среза, в некоторых примерах, контроллер 304 может вычитать высоту среза из измеренной высоты убранной массы, чтобы определять данные высоты валка. Контроллер 304 может затем определять инструкции управления транспортным средством и/или данные 312 плана маршрута на основе данных высоты валка.
В некоторых примерах, контроллер 304 может определять отсчет тюков, характерный для оценки числа тюков, которое будет достигнуто при подборе всей убранной массы, на основе полевых данных 316. Например, контроллер 304 может обрабатывать данные о размере массы (характерные для размера убранной массы) и вычислять полное количество убранной массы, которое является характерным для полного количества убранной массы (сельскохозяйственной культуры), подлежащей подбору. Контроллер 304 может затем разделять полное количество убранной массы на объем одного тюка, чтобы определить отсчет тюков. Обеспечение отсчета тюков в качестве вывода может быть полезным для планирования операции подбора убранной массы. Например, число грузовиков, которое потребуется для сбора тюков 308, и сколько времени займет работа, может оцениваться заранее. Этот тип информации может представлять собой, в частности, полезные входные данные для планирования работы. Например, контроллер 304 может обрабатывать полный объем убранной массы и/или отсчет тюков, чтобы определять энергозатраты пресс–подборщика 300. Например, если полный объем убранной массы очень велик, то контроллер 304 может определять, что пресс–подборщик 300 в некоторой точке должен будет вернуться в местоположение, где он может пополнить энергию/топливо. Поэтому, контроллер 304 может определять маршрут, который это учитывает, и/или может автоматически управлять пресс–подборщиком 300, так что его доступная энергия/топливо используется соответствующим образом для требуемого будущего пополнения энергии/топлива. Контроллер 304 может определять как исходный отсчет тюков и/или энергозатраты перед операцией подбора убранной массы, так и обновленный отсчет тюков и энергозатраты во время операции.
Транспортное средство 320 может получать: (i) полевые данные 316, которые являются характерными для сельскохозяйственного поля 302, на котором имеется другое транспортное средство 307, расположенное на нем; и (ii) данные местоположения (не показано) на поле, связанные с полевыми данными 316. Контроллер 304 может при необходимости определять данные 312 плана маршрута на основе полевых данных 316 и данных местоположения на поле.
В этом примере, транспортное средство 320 получает данные местоположения на поле, связанные с данными изображения поля. Например, транспортное средство 320 может иметь систему 324 определения местоположения, такую как GPS, которая обеспечивает данные местоположения транспортного средства, которые являются характерными для местоположения транспортного средства 320, когда получены данные изображения поля. Контроллер 304 может также принимать данные направления камеры и данные высоты транспортного средства. Данные направления камеры могут быть характерными для направления, в котором обращена камера относительно транспортного средства 320. Данные направления камеры могут быть жестко закодированы, если камера неподвижно зафиксирована на транспортном средстве 320. Если камера подвижно установлена на транспортном средстве 320, то данные направления камеры могут принимать разные значения, которые могут приниматься в качестве сигнала ввода в контроллере 304 от транспортного средства 320. Контроллер 304 может затем использовать простой тригонометрический алгоритм, чтобы соотнести данные местоположения на поле с объектами/областями, которые представлены данными изображения поля, на основе данных местоположения транспортного средства, данных направления камеры, данных высоты транспортного средства (если транспортное средство 320 представляет собой летательный аппарат) и направления движения транспортного средства 320, как известно в данной области техники.
В некоторых примерах, контроллер 304 может определять данные другого транспортного средства 310 на основе полевых данных 316 и данных местоположения на поле. Контроллер 304 может определять одно или более из данных местоположения другого транспортного средства, данных скорости другого транспортного средства, данных направления другого транспортного средства и данных размера другого транспортного средства на основе полевых данных и/или данных местоположения на поле. В этом случае, контроллер 304 может определять некоторые или все из данных другого транспортного средства на основе полевых данных 316 и данных местоположения на поле, и контроллеру 304 может не требоваться принимать данные 310 другого транспортного средства отдельно, например, непосредственно от другого транспортного средства 307.
Использование летательного аппарата 320 может позволить получать полевые данные 316 с относительно большой высоты, чтобы получить общее представление поля 302, тем самым обеспечивая широкое поле обзора. Затем или альтернативно, летательный аппарат 320 может оставаться (продолжать использоваться) с пресс–подборщиком 300 на меньшей высоте. Собранные полевые данные 316 могут потоком передаваться на контроллер 304 и/или “облако”. Когда летательный аппарат 320 продолжает использоваться с пресс–подборщиком 300, может развертываться одна или более следующих стратегий. Во–первых, летательный аппарат 320 может летать над пресс–подборщиком 300, чтобы получить информацию об окружении пресс–подборщика 300. Таким образом, он может обнаруживать объекты перед пресс–подборщиком 300, а также определять одну или более характеристик другого транспортного средства 307. Во–вторых, летательный аппарат 320 может летать перед пресс–подборщиком 300, чтобы сканировать будущую траекторию пресс–подборщика 300 для объектов. В–третьих, летательный аппарат 320 может сканировать целое поле 302, чтобы получить общее представление о любых препятствиях, включая другие транспортные средства 307.
Следует понимать, что одна или более функций транспортного средства 320, которые описаны со ссылкой на фиг. 4, могут быть реализованы сельскохозяйственным транспортным средством/пресс–подборщиком 300 самостоятельно в некоторых примерах. Например, полевые данные и данные о свойствах сельскохозяйственной культуры могут определяться посредством обработки сигналов, получаемых датчиками на сельскохозяйственном транспортном средстве/пресс–подборщике 300.
Один или более примеров, раскрытых здесь, могут улучшать безопасность работы пресс–подборщика, поскольку столкновения с объектами, такими как другие транспортные средства 307, менее вероятны.
Системы, описанные здесь, могут динамически отображать и/или прогнозировать характеристики других транспортных средств в поле во время прессования в тюки и могут использовать технологию, чтобы собирать данные для отображения других транспортных средств, и могут определять маршрут для пресс–подборщика и/или автоматически управлять пресс–подборщиком. В некоторых примерах, может использоваться дрон для отображения другого транспортного средства. Также, может использоваться информация о других транспортных средствах, которая вырабатывается самим другим транспортным средством.
Следует понимать, что любые из операций управления, раскрытых здесь, таких как установка скорости или направления движения пресс–подборщика или связанного трактора, могут выполняться путем сравнения данных с одним или несколькими пороговыми значениями, применения алгоритма к данным или использования справочной таблицы/базы данных, чтобы определить значение управления на основе принятых/определенных данных.
Изобретение относится к системе определения плана маршрута. Технический результат заключается в обеспечении возможности сельскохозяйственному транспортному средству эффективно обрабатывать поле. Система содержит контроллер, связанный с сельскохозяйственным транспортным средством и выполненный с возможностью: приема данных другого транспортного средства, которые являются характерными для другого транспортного средства, которое находится на сельскохозяйственном поле; определения данных плана маршрута, которые являются характерными для маршрута, принимаемого сельскохозяйственным транспортным средством на сельскохозяйственном поле, на основе данных другого транспортного средства; и определения данных плана маршрута путем модификации прежнего плана маршрута, в то время как сельскохозяйственное транспортное средство используется на сельскохозяйственном поле. При этом сельскохозяйственное транспортное средство имеет значение приоритета сельскохозяйственного транспортного средства, связанное с ним, и другое транспортное средство имеет значение приоритета другого транспортного средства, связанное с ним. При этом контроллер дополнительно выполнен с возможностью: сравнения значения приоритета сельскохозяйственного транспортного средства со значением приоритета другого транспортного средства и модифицирования прежнего плана маршрута, только если значение приоритета сельскохозяйственного транспортного средства представляет более низкий приоритет, чем значение приоритета другого транспортного средства. 17 з.п. ф-лы, 4 ил.
1. Система для определения плана маршрута, содержащая:
контроллер, связанный с сельскохозяйственным транспортным средством и выполненный с возможностью:
приема данных другого транспортного средства, которые являются характерными для другого транспортного средства, которое находится на сельскохозяйственном поле;
определения данных плана маршрута, которые являются характерными для маршрута, принимаемого сельскохозяйственным транспортным средством на сельскохозяйственном поле, на основе данных другого транспортного средства; и
определения данных плана маршрута путем модификации прежнего плана маршрута, в то время как сельскохозяйственное транспортное средство используется на сельскохозяйственном поле;
отличающаяся тем, что:
сельскохозяйственное транспортное средство имеет значение приоритета сельскохозяйственного транспортного средства, связанное с ним;
другое транспортное средство имеет значение приоритета другого транспортного средства, связанное с ним; и
контроллер выполнен с возможностью:
сравнения значения приоритета сельскохозяйственного транспортного средства со значением приоритета другого транспортного средства, и
модифицирования прежнего плана маршрута, только если значение приоритета сельскохозяйственного транспортного средства представляет более низкий приоритет, чем значение приоритета другого транспортного средства.
2. Система по п. 1, в которой контроллер выполнен с возможностью определения данных плана маршрута таким образом, что сельскохозяйственное транспортное средство будет избегать другого транспортного средства.
3. Система по п. 1, в которой данные другого транспортного средства содержат данные маршрута другого транспортного средства, которые являются характерными для маршрута, принимаемого другим транспортным средством.
4. Система по п. 1, в которой данные другого транспортного средства содержат данные измерения другого транспортного средства, которые являются характерными для размера и/или формы другого транспортного средства.
5. Система по п. 1, в которой данные другого транспортного средства содержат данные местоположения другого транспортного средства, которые являются характерными для местоположения другого транспортного средства.
6. Система по п. 5, в которой данные местоположения другого транспортного средства содержат одно или более из:
данных прошлого местоположения другого транспортного средства, которые являются характерными для предыдущего местоположения другого транспортного средства;
данных текущего местоположения другого транспортного средства, которые являются характерными для текущего местоположения другого транспортного средства; и
данных будущего местоположения другого транспортного средства, которые являются характерными для будущего местоположения другого транспортного средства.
7. Система по п. 1, в которой данные другого транспортного средства содержат данные скорости другого транспортного средства, которые являются характерными для скорости другого транспортного средства.
8. Система по п. 1, в которой данные другого транспортного средства содержат данные направления другого транспортного средства, которые являются характерными для направления движения другого транспортного средства.
9. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью:
приема полевых данных, которые являются характерными для убранной массы, которая подлежит подбору с сельскохозяйственного поля сельскохозяйственным транспортным средством; и
определения данных плана маршрута также на основе полевых данных.
10. Система по п. 9, в которой контроллер выполнен с возможностью приема обновленных полевых данных по мере того, как сельскохозяйственная машина подбирает убранную массу с сельскохозяйственного поля.
11. Система по п. 1, в которой контроллер выполнен с возможностью определения инструкций управления транспортным средством для сельскохозяйственного транспортного средства на основе данных плана маршрута.
12. Система по п. 11, в которой инструкции управления транспортным средством содержат инструкции управления направлением транспортного средства для автоматического управления направлением движения сельскохозяйственного транспортного средства.
13. Система по п. 12, в которой инструкции управления транспортным средством дополнительно содержат инструкции скорости на маршруте для автоматического управления скоростью сельскохозяйственного транспортного средства в местоположениях вдоль маршрута.
14. Система по п. 1, дополнительно содержащая:
беспилотное транспортное средство, выполненное с возможностью получения:
полевых данных, характерных для сельскохозяйственного поля, на котором имеется другое транспортное средство; и
данных местоположения на поле, связанных с полевыми данными; и
причем контроллер выполнен с возможностью определения данных другого транспортного средства на основе полевых данных и данных местоположения на поле.
15. Система по п. 14, в которой контроллер дополнительно выполнен с возможностью:
определения данных измерения другого транспортного средства, которые являются характерными для размера другого транспортного средства, на основе полевых данных; и
определения данных плана маршрута также на основе данных измерения другого транспортного средства.
16. Система по п. 1, в которой данные плана маршрута являются характерными для маршрута, принимаемого сельскохозяйственным транспортным средством для всей необработанной части сельскохозяйственного поля.
17. Система по п. 11, в которой система дополнительно содержит сельскохозяйственное транспортное средство, которое выполнено с возможностью работы в соответствии с инструкциями управления транспортным средством.
18. Система по п. 1, в которой сельскохозяйственное транспортное средство представляет собой пресс–подборщик.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Шнекоцентробежный насос | 1987 |
|
SU1548531A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ И СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СИСТЕМ СЕЛЬХОЗМАШИН | 2007 |
|
RU2439835C2 |

