ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение, в общем, относится к системам уборки урожая сельскохозяйственной культуры. Более конкретно, настоящее изобретение относится к системам уборки урожая сельскохозяйственной культуры, использующим уборочную машину и накопитель для накопления сельскохозяйственной культуры. Еще более конкретно, изобретение относится к такой системе, в которой предусмотрена виртуальная линия срабатывания для размещения материала сельскохозяйственной культуры в установленном месте (местах).
УРОВЕНЬ ТЕХНИКИ
[0002] Одной общепризнанной проблемой сельскохозяйственного прессования, использующего рулонные и/или прямоугольные пресс-подборщики, является то, что тюки, как правило, выгружаются из пресс-подборщика на поле в случайном порядке. Это требует от оператора, впоследствии, езды по всему полю для сбора тюков и перемещения их к месту окончательного хранения. Этот подход является трудоемким; он может привести к дополнительному уплотнению грунта, потенциальному ущербу сельскохозяйственной культуре и чрезмерному изнашиванию транспортного оборудования.
[0003] Накопители тюков используются для сбора тюков вместе в партии. Когда накопитель заполнен, он обычно сбрасывает собранную сельскохозяйственную культуру в месте, где она накапливается.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0004] В одном варианте осуществления предложен способ выгрузки собранной сельскохозяйственной культуры из накопителя сельскохозяйственной культуры. По меньшей мере одна виртуальная линия срабатывания установлена с использованием блока Глобальной Системы Позиционирования («GPS»), лазерного передатчика и приемника, передатчика светового луча и приемника, ультразвукового передатчика и приемника или другого устройства. Начинается операция уборки урожая. Собранная сельскохозяйственная культура передается в накопитель сельскохозяйственной культуры. Сообщается, что виртуальная линия срабатывания приближается, виртуальная линия срабатывания пересекается и/или виртуальная линия срабатывания пересечена. Система выгрузки накопителя сельскохозяйственной культуры приводится в действие в ответ на сообщение для выгрузки части собранной сельскохозяйственной культуры или всей собранной сельскохозяйственной культуры. Собранная сельскохозяйственная культура размещается на виртуальной линии срабатывания, смежно виртуальной линии срабатывания, в области, образованной заданным расстоянием от виртуальной линии срабатывания, или за пределами области, образованной заданным расстоянием от виртуальной линии срабатывания.
[0005] В другом варианте осуществления предложена комбинация уборочной машины и накопителя сельскохозяйственной культуры. Уборочная машина выполнена с возможностью передачи собранной сельскохозяйственной культуры в накопитель сельскохозяйственной культуры. Накопитель сельскохозяйственной культуры содержит по меньшей мере один привод для избирательной выгрузки собранной сельскохозяйственной культуры на поле. Блок GPS сконфигурирован с по меньшей мере одной виртуальной линией срабатывания. Электронный блок управления («ЭБУ») находится в сообщении с блоком GPS. ЭБУ выполнен с возможностью избирательного управления приводом накопителя сельскохозяйственной культуры для выгрузки собранной сельскохозяйственной культуры на поле, когда ЭБУ получает сигнал от блока GPS, когда виртуальная линия срабатывания приближается, виртуальная линия срабатывания пересекается или виртуальная линия срабатывания пересечена.
[0006] В целом, система виртуальной линии срабатывания предназначена для автоматической или ручной активации накопителя тюков всякий раз, когда виртуальная линия срабатывания пересекается. Система состоит из блока GPS и ЭБУ, который соединен с приводами, которые используются для наклона опорной рамы накопителя для сброса тюков. Посредством этой системы, оператор определяет виртуальную линию срабатывания с использованием блока GPS, а затем система GPS генерирует «виртуальную линию срабатывания» на поле. Каждый раз, когда комбинация трактор/пресс-подборщик/накопитель проходит через виртуальную линию срабатывания, накопитель может быть автоматически приведен в действие для сброса всех тюков, хранящихся в нем, или в качестве альтернативы, выдается сигнал для того, чтобы позволить оператору вручную привести в действие накопитель, когда виртуальная линия срабатывания пересекается. Конечным результатом является то, что тюки размещаются в ряд, соответствующий виртуальной линии срабатывания, и даже более, трактор/пресс-подборщик/накопитель не должны двигаться по прямой линии, а могут следовать за валком по мере необходимости. Программное обеспечение может ввести виртуальную линию срабатывания на основании топографических особенностей местности и других факторов (например, уплотнения почвы, прогнозируемой урожайности, фактической урожайности).
[0007] Виртуальные линии срабатывания могут быть различной ширины. Оператор может сбрасывать собранную сельскохозяйственную культуру с одной или с другой стороны от виртуальной линии срабатывания для того, чтобы парковать грузовой автомобиль в середине виртуальной линии срабатывания и загружаться с любой стороны. Ширина виртуальной линии срабатывания в диапазоне 0-50 футов, как правило, хорошо работает для грузовых автомобилей, загружающих сено. Диапазоны свыше 60 футов работают хорошо для больших транспортных средств. Виртуальные линии срабатывания также могут иметь интервалы на основании фактической урожайности сельскохозяйственной культуры или прогнозируемой урожайности сельскохозяйственной культуры.
[0008] В то время как вариант осуществления подробно описанный ниже относится к комбинации рулонного пресс-подборщика и накопителя тюков, предполагается, что виртуальная линия срабатывания может быть использована вместе с другими комбинациями уборочной машины и накопителя.
[0009] Другие признаки и аспекты станут очевидны при рассмотрении подробного описания и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
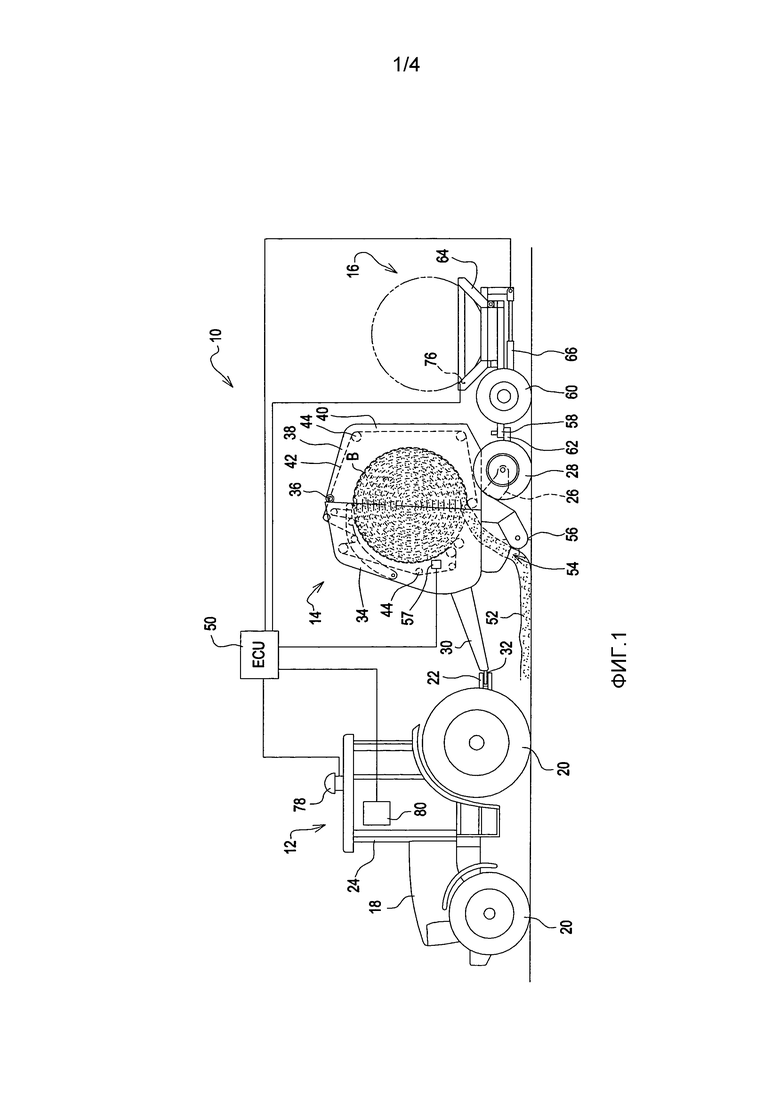
[0010] Фиг. 1 представляет собой частичный схематичный вид комбинация трактор-пресс-подборщик-накопитель тюков.
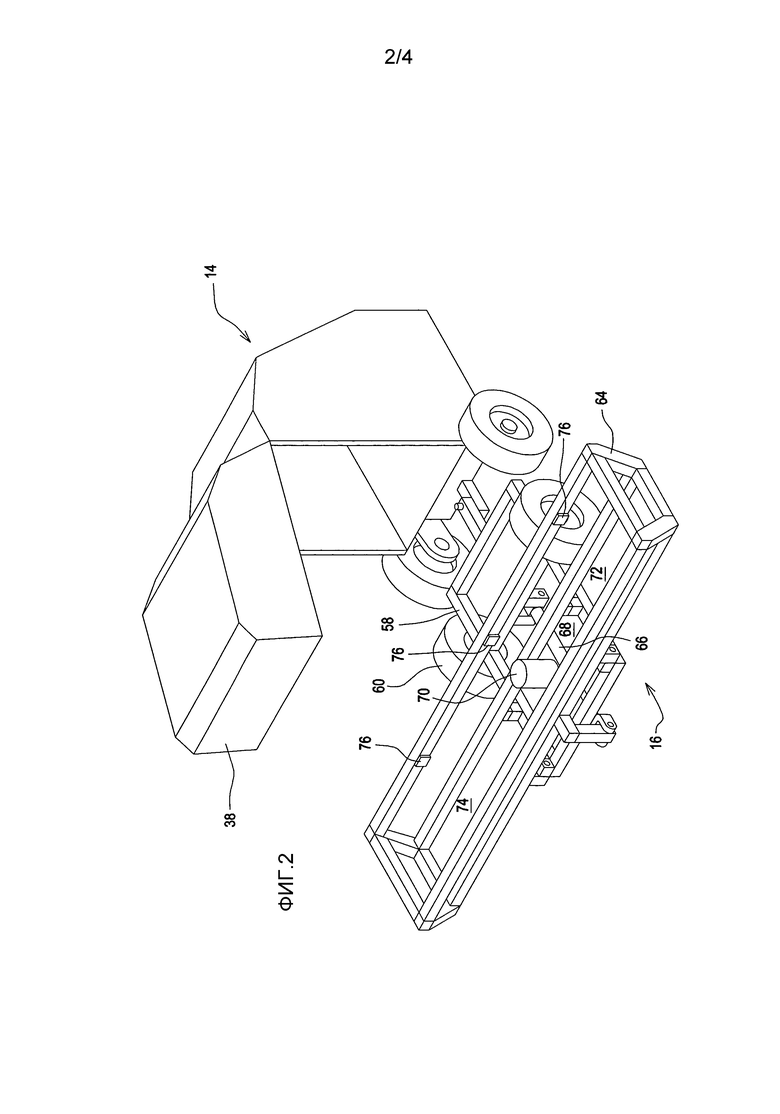
[0011] Фиг. 2 представляет собой частичный схематичный вид комбинации по фиг. 1, представляющий увеличенную детализацию пресс-подборщика и накопителя тюков.
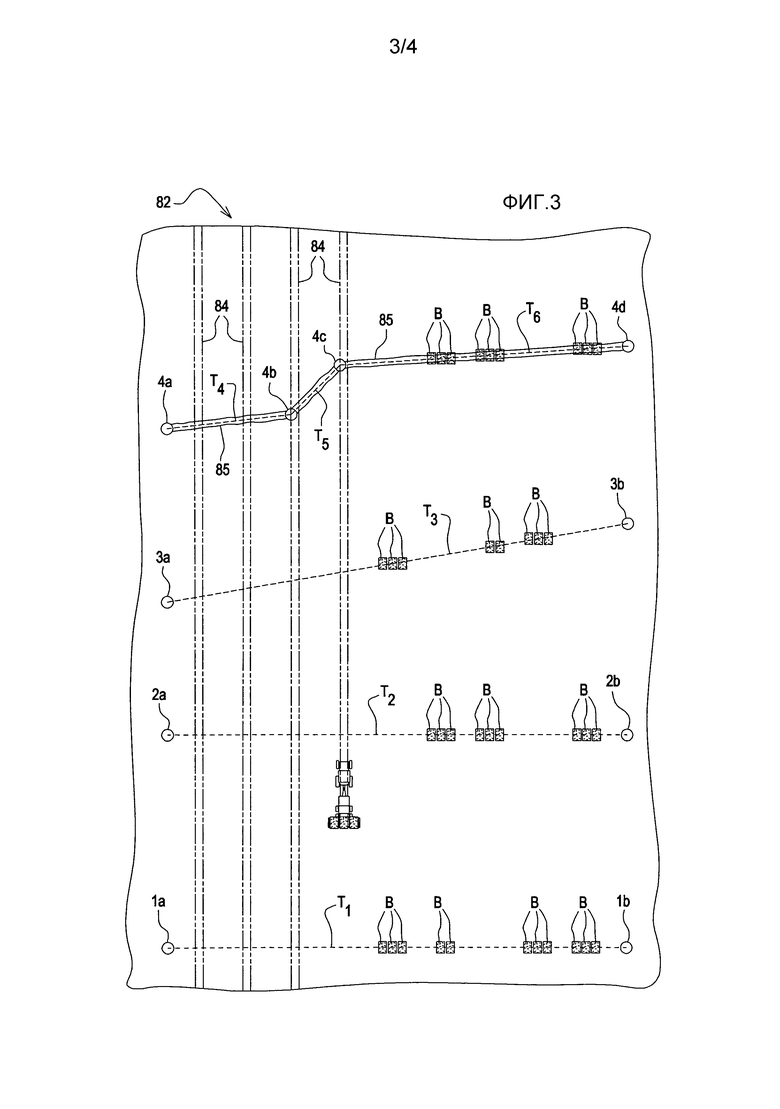
[0012] Фиг. 3 представляет собой вид в плане поля сельскохозяйственной культуры, в котором используется виртуальная линия срабатывания в соответствии с изобретением.
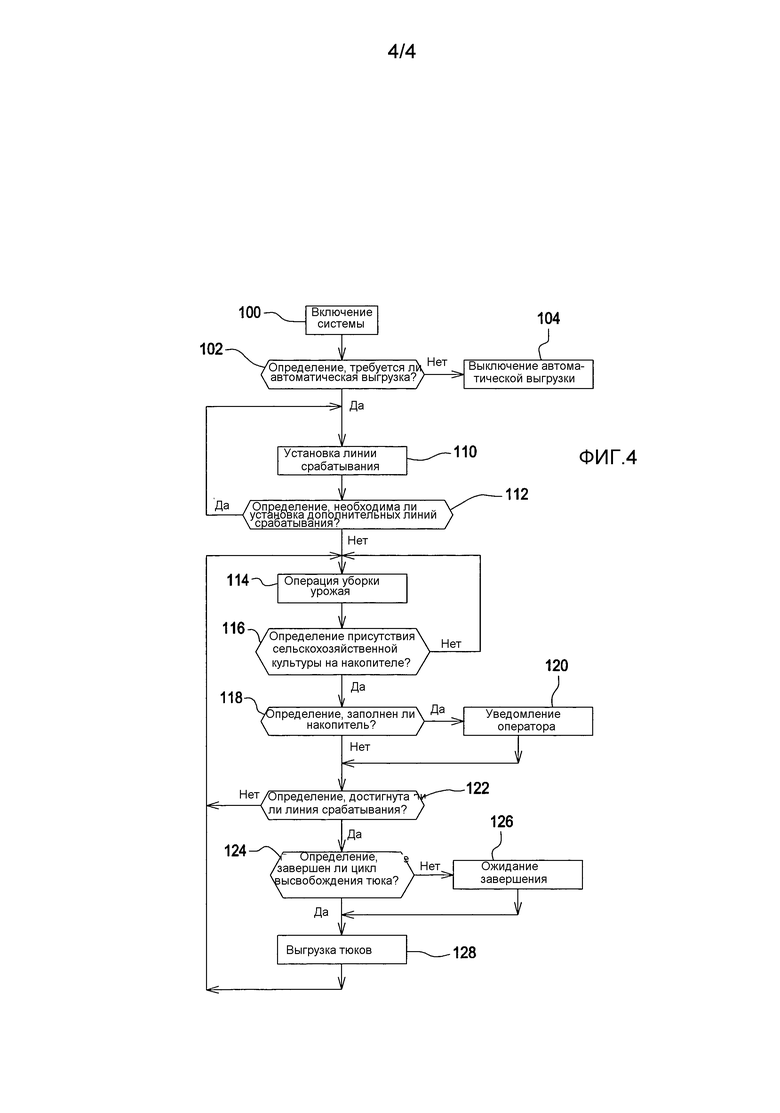
[0013] Фиг. 4 представляет собой блок-схему, изображающую логику управления, для приведения в действие накопителя по отношению к виртуальной линии срабатывания.
[0014] Прежде чем любые варианты осуществления будут подробно описаны, следует отметить, что изобретение не ограничено в своем применении деталями конструкции и расположением компонентов, излагаемыми в последующем описании или показанными на чертежах. Изобретение допускает другие варианты осуществления и применения или осуществляется различными способами. Дальнейшие варианты осуществления изобретения могут включать любую комбинацию признаков из одного или более зависимых пунктов формулы изобретения, и такие признаки могут быть включены, вместе или по отдельности, в любой независимый пункт формулы изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0015] Фиг. 1 иллюстрирует комбинацию 10 трактор-пресс-подборщик-накопитель тюков согласно одному варианту осуществления. Комбинация 10 трактор-пресс-подборщик-накопитель тюков включает трактор 12, пресс-подборщик 14, и накопитель 16 тюков. Трактор 12 имеет раму 18, поддерживаемую на колесах 20 по меньшей мере одно из которых приводится в действие посредством первичного двигателя, такого как дизельный двигатель, через силовую передачу (не показана). Трактор 12 дополнительно включает прицепное приспособление и/или сцепное устройство 22 и станцию 24 оператора.
[0016] Пресс-подборщик 14 имеет основную раму 26, поддерживаемую на паре ходовых колес 28. Дышло 30 имеет задний конец, соединенный с рамой 26, и имеет передний конец, образованный устройством 32 соединительной скобы, приспособленным для соединения со сцепным устройством 22 трактора 12. Пара вертикальных боковых стенок 34 закреплена на основной раме 26, и образуют передние области противоположных боковых стенок камеры прессования. Крышка 38 выгрузочного люка, включающая противоположные вертикальные боковые стенки 40, которые образуют противоположные стороны задней области камеры прессования установлена для поворота вертикально вокруг горизонтального шарнирного устройства 36, расположенного в верхнем заднем положении боковых стенок 34. Цилиндровое средство люка (не показано) соединено между основной рамой 26 и противоположными боковыми стенками 40 крышки 38 выгрузочного люка и избирательно действует для перемещения крышки 38 выгрузочного люка между закрытым положением прессования и открытым положением выгрузки. Пресс-подборщик 14, как представлено, является конструкцией камеры переменного размера и, таким образом, содержит множество в продольном направлении продолжающихся бок о бок ремней 42, поддерживаемых на множестве роликов 44 (только некоторые из которых представлены). Камера для формирования тюка образована боковыми стенками 34, 40, роликами 44 и ремнями 42.
[0017] По меньшей мере, один ЭБУ 50 предусмотрен для электронного управления функциями пресс-подборщика 14 и накопителя 16. ЭБУ 50 выполнен с возможностью приема сигналов от различных датчиков на пресс-подборщике и накопителе (например, образования диаметра тюка, формы тюка, веса тюка) и для инициирования различных функций пресс-подборщика (например, цикла связывания или обертывания, высвобождения тюка, выгрузки накопителя). Более конкретно, следует понимать, что ЭБУ выполнен с возможностью обеспечения сигнала для приведения в действие различных исполнительных механизмов на накопителе для, среди прочего, выгрузки тюков из него только тогда, когда тюк присутствует.
[0018] В процессе своей основной работы, пресс-подборщик 14 тянется через поле трактором 12, прикрепленным к дышлу 30. Материал 52 сельскохозяйственной культуры подается во вход 54 сельскохозяйственной культуры камеры, формирующей тюк, от валка сельскохозяйственной культуры на земле посредством подборщика 56. В пресс-подборщике 14 материал 52 сельскохозяйственной культуры прокатывается по спирали в цилиндрический тюк В. После завершения тюк В оборачивается шпагатом или другим соответствующим упаковочным материалом и выгружается посредством приведения в действие цилиндров люка, которые открывают люк 38, позволяя готовому цилиндрическому тюку В быть выгруженным из пресс-подборщика 14 в накопитель 16 тюков. Пресс-подборщик 14 может быть дополнительно снабжен средством для образования, когда тюк совершает цикл высвобождения. Такое средство может быть в виде датчиков 57, связанных с одним или несколькими шпагатами или сетчатой обертывающей системой пресс-подборщика 14, люком, пружинной защелкой люка, системой натяжения ремня и т.д., любая из которых может обеспечивать индикацию готовности тюка, как хорошо известно, в данной области техники. Иллюстрированный пресс-подборщик 14 представлен только в качестве примера, следует понимать, что пресс-подборщик 14 может насчитывать любое количество конфигураций, включая, но, не ограничиваясь, рулонными пресс-подборщиками с фиксированной камерой, маленькими прямоугольными пресс-подборщиками и крупными прямоугольными пресс-подборщиками.
[0019] Ссылаясь к фигурам 1 и 2, накопитель 16 тюков имеет основную раму 58, проддерживаемую на ходовых колесах 60. Один или несколько буксировочных элементов 62 предусмотрены на конце основной рамы 58 для крепления накопителя 16 тюков к пресс-подборщику 14 прицепным способом. Накопитель 16 тюков снабжен ложементом 64 для тюка, шарнирно прикрепленным к раме 58. Ложемент 64 для тюка снабжен одним или несколькими исполнительными механизмами 66 для подъема переднего участка ложемента 64 относительно рамы 58 для того, чтобы позволить тюкам скатываться назад и освобождаться от ложемента 64, когда накопитель 16 тюков выгружается. Эти исполнительные механизмы 66 могут быть в виде гидравлических, электрических, пневматических или других подобных конфигураций, и избирательно управляемыми в ответ на сигналы, полученные от ЭБУ 50. Конкретный рулонный накопитель 16 тюков представлен принимающим готовый цилиндрический тюк В от пресс-подборщика 14 в центральном положении 68 (фиг. 2). В зависимости от того, заняты или не заняты другие места на накопителе 16 тюков, накопитель 16 тюков посредством ЭБУ 50 избирательно использует исполнительные механизмы 70 для перемещения тюка из первого центрального положения 68 или во второе 72 или в третье 74 положения слева и справа от центрального положения, соответственно. Снова следует отметить, что исполнительные механизмы 70 могут быть любой известной конфигурации (например, электрические, гидравлические, пневматические). Соответственно, когда накопитель 16 тюков полный, три тюка выровнены бок-о-бок на ложементе 64 и могут быть одновременно выгружены на землю в той же бок-о-бок конфигурации.
[0020] Предполагается, что накопитель 16 тюков может быть снабжен датчиками 76 различных известных конфигураций (например, электромеханическими переключателями, бесконтактными датчиками, датчиками нагрузки) для образования, присутствует или нет тюк на накопителе 16 тюков и в каком положении. Выход таких датчиков 76 может быть соединен с ЭБУ 50 для целей, которые станут очевидными из последующего описания. Следует также отметить, что можно выгрузить накопитель 16 тюков, когда он имеет менее трех рулонов на нем. Подобным образом было бы возможно обеспечить накопитель 16 тюков, в котором отдельные тюки могут быть избирательно выгружены путем обеспечения ложемента из нескольких частей, имеющих отдельные исполнительные механизмы для каждой части. Проиллюстрированный накопитель 16 тюков является только одним примером накопителя 16 тюков, способным нести три рулонных тюка. Тем не менее, предполагается, что накопитель 16 тюков может насчитывать любое количество форм, размеров, емкостей и конфигураций для накопления множество тюков различных форм и размеров, таких как рулонные, маленькие прямоугольные и крупные прямоугольные тюки.
[0021] Комбинация 10 трактор-пресс-подборщик-накопитель тюков дополнительно снабжен GPS приемником 78 в проводной или беспроводной связи с ЭБУ 50, который, в свою очередь, подключен к дисплею 80 на рабочем месте 24 оператора трактора 12. Альтернативно, автономный блок GPS может быть предусмотрен имеющим специальный ЭБУ и дисплей или сотовый телефон с возможностями GPS и/или программным обеспечением, или лазерный передатчик и приемник, скрытую проводку, передатчик светового пучка и приемник, ультразвуковой передатчик и приемник, или другое устройство. Для целей данного раскрытия, такой автономный блок GPS требует по меньшей мере проводного или беспроводного выхода, способного взаимодействовать с ЭБУ 50 пресс-подборщика 14 и накопителя 16 тюков.
[0022] Работа системы и способ данного раскрытия будут теперь описаны со ссылкой к фигурам 3 и 4. Перед началом операции прессования оператор будет определять нужное место (места), где он/она хотел бы накапливать тюки для последующего подъема и хранения. Выбор места (мест) накопления, как правило, осуществляется для удобства оператора, учитывая, например, такие факторы, как необходимость уменьшения уплотнения почвы, уменьшения движения транспорта по полю, близость к месту хранения и рельеф местности (например, целесообразно накапливать тюки в верхней или нижней части холма, а не на стороне холма, целесообразно накапливать тюки на мысах, вдоль рвов или травянистых водотоков. Количество и частота мест накопления вдоль пути (путей) прессования также ограничивается урожайностью сельскохозяйственной культуры в сравнении с емкостью накопителя. Другими словами, если конкретное поле или участок поля имеет более высокую урожайность материала сельскохозяйственной культуры, больше сельскохозяйственной культуры будет подаваться в пресс-подборщик на единицу пройденного пути и, таким образом, больше тюков будут готовы за более короткое расстояние, тем самым вынуждая создавать виртуальные линии срабатывания, которые являются близко расположенными. Урожайность сельскохозяйственной культуры для конкретного поля и сельскохозяйственной культуры может быть образована из хронологических данных по урожайности для выработки прогноза урожайности или, например, во время операции прессования путем мониторинга потока сельскохозяйственной культуры в пресс-подборщик посредством соответствующих датчиков, и/или фактическая урожайность сельскохозяйственной культуры может быть использована путем мониторинга количества тюков, изготовленных за единицу пути. После того как оператор определил желательное место (места) накопления, он или она устанавливает в блоке 78 GPS виртуальную линию срабатывания.
[0023] Как представлено на фиг. 3, примерное поле 82 сельскохозяйственной культуры имеет множество валков 84 сельскохозяйственной культуры, из которых материал сельскохозяйственной культуры будет тюковаться. Оператор установил между точками 1а и 1b первую виртуальную линию T1 срабатывания. Дополнительные линии Т2, Т3, Т4, Т5 и Т6 срабатывания также установлены между точками 2a и 2b, 3а и 3b, 4a и 4b, 4b и 4с, 4с и 4d, соответственно. Из иллюстрации будет очевидно, что виртуальные линии срабатывания могут быть установлены в основном перпендикулярно к валкам 84, как представлено на иллюстрации линии T1 срабатывания, или они могут быть установлены под различными углами к валкам, как представлено на иллюстрации линии T3 срабатывания. Дополнительно следует отметить со ссылкой на виртуальные линии Т4, Т5 и Т6 срабатывания, что одна виртуальная линия срабатывания не обязательно пересекает все поле, и что виртуальные линии Т срабатывания могут быть созданы для выравнивания с рельефом местности или по другим причинам. Более конкретно, можно видеть, что виртуальная линия Т4 срабатывания установлена между точками 4а и 4b, дополнительная виртуальная линия Т5 соединяет точки 4b с 4с, и далее виртуальная линия Т6 соединяет точки 4с и 4d, в целом образуя многоугловую виртуальную линию срабатывания вдоль всего поля, для следования, например, топографическому контуру, такому как травянистый водоток 85. Таким образом, оператор может следовать валкам и не беспокоиться о перемещении по прямой линии, для спокойного пересечения виртуальной линии T срабатывания.
[0024] С установленными виртуальными линиями Т срабатывания должно быть очевидно, что система может быть сконфигурирована, как описано более подробно ниже, чтобы автоматически накапливать на поле любые тюки, присутствующие в накопителе во время пересечения виртуальной линии срабатывания. Это обычно осуществляется посредством связи от приемника 78 GPS с ЭБУ 50, который, в свою очередь управляет приведения в действие исполнительных механизмов 66 накопителя для поворота ложемента 64 накопителя для выгрузки тюков, когда был получен сигнал от приемника 78 GPS, что виртуальная линия Т срабатывания была пересечена.
[0025] Со ссылкой к блок-схеме на фиг. 4 можно видеть, что логика для системы виртуальной линии срабатывания начинается с 100, когда система включена. Далее в 102 оператор выбирает начинать ли операцию прессования в режиме «автоматической выгрузки», при котором тюки будут автоматически выгружаться или сбрасываться с накопителя, когда виртуальная линия срабатывания пересечена. В противном случае, функция «автоматической выгрузки» отключается в 104. Если ответ на 102 «да», то оператор устанавливает первую виртуальную линию срабатывания, которая хранится в памяти на 110. Затем на 112 определяется, являются ли желательными дополнительные линии срабатывания. Если ответ на 112 «да» логика возвращается к 110, где дополнительные линии срабатывания будут установлены и сохранены. Если на 112 ответ «нет», тогда на 114 операция прессования начинается. На 116 логика определяет, присутствует ли готовый тюк в накопителе. Если на 116 ответ «нет» логика возвращается обратно к 114. Если на 116 ответ «да» логика переходит к 118, где определяется, является ли накопитель заполненным. Если ответ на 118 «да», отправляется уведомление на 120 для оператора путем визуальной или звуковой сигнализации, так что оператор может принять решение, стоит ли устанавливать дополнительные линии срабатывания для накопления тюков на поле на данном месте, или для транспортировки тюков в другое место для накопления. Если, однако, на 118 ответ «нет», то логика переходит к 122, где определяется, была ли достигнута виртуальная линия срабатывания.
[0026] Здесь следует отметить, что определение того, присутствуют ли какие-то тюки на накопителе или накопитель является заполненным, может быть осуществлено различными способами. Как упоминалось выше, накопитель может быть сконфигурирован с датчиками 76, которые взаимодействуют с ЭБУ 50, чтобы указывать на наличие тюков в накопителе. Альтернативно, предполагается, что вместо, или в дополнение к датчикам можно вести в ЭБУ 50 текущий подсчет общего объема готовых тюков и, более конкретно, количество готовых тюков, начиная с последнего сбрасывания с накопителя 16 тюков.
[0027] Если на 122 ответ «нет» логика возвращается обратно к 114. Если ответ на 122 «да», то на 124 устанавливается, завершен ли процесс высвобождения пресс-подборщиком тюка на накопитель. Если ответ на 124 «нет», система ожидает завершения цикла высвобождения на 126, и затем переходит к 128. Если ответ на 124 «да», то логика немедленно выполняет этап 128, в котором тюки размещаются на поле. Следует отметить, что этапы 124 и 126 логики нужны только для не-непрерывных прес-подборщиков, таких как обычные рулонные пресс-подборщики, в которых процесс прессования временно приостанавливается во время цикла высвобождения. В таких системах нежелательно открывать задний люк пресс-подборщика во время опорожнения накопителя и, наоборот, из-за возможного ваимовлияния люка с ложементом накопителя. Для больших и маленьких прямоугольных пресс-подборщиков и/или непрерывных рулонных пресс-подборщиков этапы 124 и 126 могут не быть необходимыми. После 128 логика переходит к 114.
[0028] В свете вышеизложенного можно видеть, что изобретение обеспечивает способ и устройство для автоматического сброса накопленных тюков в заранее образованных местах. Более конкретно, когда операция прессования продвигается взад и вперед валков сельскохозяйственной культуры, комбинация трактор-пресс-подборщик-накопитель тюков периодически пересекает заранее установленные виртуальные линии срабатывания, в это время любые тюки, присутствующие на накопителе, размещаются на землю. Этот способ приводит к размещению тюков близко друг к другу на местах расположения, выбранных оператором, приводящий к более удобному и эффективному поиску тюков во время операции сбора и хранения. Время, необходимое для сбора тюков уменьшается, таким образом, также уменьшается время работы и износ оборудования. Дополнительно, уплотнение грунта и повреждение сельскохозяйственной культуры может быть уменьшено за счет использования системы для уменьшения движения транспорта по полю во время сбора тюков. Система совместима с обычным оборудованием для прессования и техникой, поскольку она позволяет оператору использовать обычные пресс-подборщики и накопители и выполнить операцию прессования без необходимости отклоняться от валка во время прессования для размещения тюков на более выгодных местах, в виду того, что это выполняется автоматически, когда заранее установленные виртуальные линии срабатывания пересекаются.
[0029] Различные признаки изложены в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЫГРУЗКИ С ИЗМЕНЯЮЩЕЙСЯ СКОРОСТЬЮ ДЛЯ НАКОПИТЕЛЬНОГО УСТРОЙСТВА ДЛЯ УРОЖАЯ | 2015 |
|
RU2689714C2 |
| СПОСОБ ЗАГОТОВКИ ПРЕССОВАННЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2014 |
|
RU2573969C1 |
| Способ возделывания сельскохозяйственных культур | 1989 |
|
SU1681750A1 |
| СПОСОБ И МНОГОФУНКЦИОНАЛЬНЫЙ АГРЕГАТ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2012 |
|
RU2519855C2 |
| СПОСОБ И СИСТЕМА УБОРКИ УРОЖАЯ | 2018 |
|
RU2738485C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА | 2018 |
|
RU2749557C2 |
| Способ уборки зерновых сельскохозяйственных культур | 1983 |
|
SU1122262A1 |
| ГИДРАВЛИЧЕСКАЯ ЧЕРЕДУЮЩАЯСЯ СИСТЕМА ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕСС-ПОДБОРЩИКА | 2016 |
|
RU2719195C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕСС-ПОДБОРЩИКОМ И ПРЕСС-ПОДБОРЩИК | 2006 |
|
RU2365087C1 |
| Способ уборки зерновых культур и семенников трав | 1987 |
|
SU1516055A1 |
Изобретение относится к сельскому хозяйству. Способ выгрузки одного или более тюков из накопителя сельскохозяйственной культуры включает определение по меньшей мере одной виртуальной линии срабатывания и начало сбора урожая пресс-подборщиком. Во время сбора урожая перемещают один или более тюков из пресс-подборщика в накопитель сельскохозяйственной культуры и определяют приближение и пересечение виртуальной линии срабатывания. Используя датчик, связанный с пресс-подборщиком или накопителем сельскохозяйственной культуры, определяют, завершено ли перемещение сельскохозяйственной культуры из пресс-подборщика в накопитель. После завершения перемещения сельскохозяйственной культуры из пресс-подборщика в накопитель приводят в действие систему выгрузки одного или более тюков, которые размещают по существу на виртуальной линии срабатывания. Предложенный способ обеспечивает минимальные перемещения машин по полю для сбора тюков и перевозки их к месту окончательного хранения. 12 з.п. ф-лы, 4 ил.
1. Способ выгрузки одного или более тюков из накопителя сельскохозяйственной культуры, включающий этапы, на которых:
устанавливают по меньшей мере одну виртуальную линию срабатывания, образованную линией;
начинают операцию сбора урожая пресс-подборщиком;
перемещают один или более тюков из пресс-подборщика в накопитель сельскохозяйственной культуры;
сообщают, что виртуальная линия срабатывания приближается, виртуальная линия срабатывания пересекается и/или виртуальная линия срабатывания пересечена;
определяют, завершено ли перемещение из пресс-подборщика в накопитель сельскохозяйственной культуры, с использованием датчика, связанного с пресс-подборщиком или накопителем сельскохозяйственной культуры;
временно приостанавливаются до завершения перемещения из пресс-подборщика в накопитель сельскохозяйственной культуры;
приводят в действие систему выгрузки накопителя сельскохозяйственной культуры в ответ на сообщение для выгрузки одного тюка или более чем одного тюка; и
размещают один или более тюков по существу на виртуальной линии срабатывания.
2. Способ по п. 1, в котором этап установления по меньшей мере одной виртуальной линии срабатывания осуществляют посредством по меньшей мере одного из: блока GPS, лазерного передатчика и приемника, скрытой проводки, передатчика и приемника светового пучка и ультразвукового передатчика и приемника.
3. Способ по п. 1, дополнительно включающий определение присутствия на накопителе сельскохозяйственной культуры одного или более тюков до приведения в действие системы выгрузки.
4. Способ по п. 1, дополнительно включающий определение наполнения накопителя сельскохозяйственной культуры до пересечения виртуальной линии срабатывания.
5. Способ по п. 1, дополнительно включающий мониторинг присутствия одного или более тюков на накопителе сельскохозяйственной культуры с использованием по меньшей мере одного датчика на накопителе сельскохозяйственной культуры.
6. Способ по п. 1, дополнительно включающий мониторинг присутствия одного или более тюков на накопителе сельскохозяйственной культуры посредством сохранения данных о количестве тюков на накопителе сельскохозяйственной культуры с момента последней выгрузки накопителя сельскохозяйственной куль туры.
7. Способ по п. 1, дополнительно включающий обеспечение по меньшей мере одного из: звукового сигнала и визуального сигнала для оператора, что накопитель сельскохозяйственной культуры заполнен и что виртуальная линия срабатывания еще не пересечена.
8. Способ по п. 1, дополнительно включающий ожидание завершения операции уборки урожая до приведения в действие системы выгрузки.
9. Способ по п. 1, дополнительно включающий установление линии срабатывания на основании по меньшей мере одного из: близости к месту хранения и рельефа поля.
10. Способ по п. 1, дополнительно включающий этап установления интервалов между виртуальными линиями срабатывания на основании одного из: фактической урожайности сельскохозяйственной культуры и прогнозируемой урожайности сельскохозяйственной культуры.
11. Способ по п. 10, дополнительно включающий определение прогнозируемой урожайности сельскохозяйственной культуры на основании хронологических данных о урожайности для поля и типа сельскохозяйственной культуры.
12. Способ по п. 10, дополнительно включающий определение фактической урожайности сельскохозяйственной культуры на основании определяемой скорости потока сельскохозяйственной культуры во время операции уборки урожая.
13. Способ по п. 10, дополнительно включающий определение фактической урожайности сельскохозяйственной культуры на основании количества тюков, полученных на единицу перемещения по полю.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Устройство автоматической выгрузки копнителя зерноуборочного комбайна | 1989 |
|
SU1715233A1 |
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2005 |
|
RU2384987C2 |
| СПОСОБ И СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СИСТЕМ СЕЛЬХОЗМАШИН | 2007 |
|
RU2439835C2 |

