УРОВЕНЬ ТЕХНИКИ
Область техники
[0001] Изобретение относится к устройству помощи при парковке транспортного средства.
Описание предшествующего уровня техники
[0002] Известно устройство помощи при парковке транспортного средства, которое производит парковку транспортного средства в автономном режиме на парковочное место в отсутствие линейной разметки области парковки, такой как белые линии, определяющие области парковки. Парковочное место, не имеющее линейной разметки области парковки, представляет собой, например, парковочное место возле частного дома. Это известное устройство помощи при парковке транспортного средства регистрирует информацию о парковочном месте тогда, когда упомянутое устройство завершает парковку транспортного средства в автономном режиме. Информация о парковочном месте представляет собой информацию о месте на парковочной площадке, на котором припарковано данное транспортное средство. Поскольку данное известное устройство помощи при парковке транспортного средства перемещает транспортное средство в автономном режиме, чтобы припарковать это транспортное средство на то же самое парковочное место, на котором производилась парковка транспортного средства в автономном режиме ранее, упомянутое устройство помощи при парковке транспортного средства периодически получает информацию об этом парковочном месте. Существует устройство помощи при парковке транспортного средства для перемещения и парковки транспортного средства на одном и том же парковочном месте, сравнивающее полученную информацию с зарегистрированной информацией об этом парковочном месте и устанавливающее взаимосвязь между положением транспортного средства и парковочным местом. Такое устройство помощи при парковке транспортного средства известно, например, из японского патента JP 2017-138664. Устройство помощи при парковке транспортного средства, известное из патента JP 2017-138664, получает изображения объектов, стоящих на этом парковочном месте и/или вокруг него с помощью камеры, и регистрирует характерные элементы стоящих объектов на изображениях, входящих в информацию о данном парковочном месте.
[0003] Может возникнуть такая ситуация, когда в момент регистрации характерных элементов стоящих объектов в транспортном средстве находится только водитель, а затем, когда транспортное средство осуществляет парковку в автономном режиме на парковочном месте, в транспортном средстве, помимо водителя, находятся один или более пассажиров. В этой ситуации наклон транспортного средства может изменяться в промежутке между временем регистрации характерных элементов и временем парковки транспортного средства в автономном режиме на парковочном месте. Кроме того, может возникнуть такая ситуация, когда уклон поверхности земли, по которой движется транспортное средство во время парковки транспортного средства в автономном режиме, отличается от уклона поверхности земли, по которой транспортное средство движется во время регистрации характерных элементов. В такой ситуации наклон транспортного средства может изменяться в промежутке между временем парковки транспортного средства в автономном режиме и временем регистрации характерных элементов. В описанных ситуациях форма стоящего объекта на изображении с камеры может изменяться в промежутке между временем регистрации характерных элементов и временем парковки транспортного средства в автономном режиме. Следовательно, может оказаться невозможным определить, что характерные элементы, полученные во время парковки транспортного средства в автономном режиме, являются зарегистрированными характерными элементами стоящего объекта, даже если полученные характерные элементы действительно являются зарегистрированными характерными элементами стоящего объекта. В этом случае может быть невозможно произвести парковку транспортного средства в автономном режиме на парковочном месте.
[0004] Кроме того, может возникнуть ситуация, когда характерные элементы были зарегистрированы утром, а парковка транспортного средства в автономном режиме происходила во второй половине дня. В этой ситуации характер солнечного света, освещающего непосредственно стоящий объект, и солнечного света, отражаемого от земли и освещающего стоящий объект, изменяется в промежутке между временем регистрации характерных элементов и временем парковки транспортного средства в автономном режиме. Также может возникнуть ситуация, когда характерные элементы зарегистрированы в дневное время, а парковка транспортного средства в автономном режиме происходит в ночное время. И в этой ситуации характер солнечного света, освещающего непосредственно стоящий объект, и солнечного света, отражаемого от земли, а затем освещающего стоящий объект, изменяется в промежутке между временем регистрации характерных элементов и временем парковки транспортного средства в автономном режиме. В этих ситуациях характерные элементы стоящего объекта на изображении с камеры могут изменяться между временем регистрации характерных элементов и временем парковки транспортного средства в автономном режиме. Следовательно, может оказаться невозможным определить, что характерные элементы, полученные во время парковки транспортного средства в автономном режиме, являются зарегистрированными характерными элементами стоящего объекта, даже если полученные характерные элементы действительно являются зарегистрированными характерными элементами стоящего объекта. В этом случае может быть невозможно произвести парковку транспортного средства в автономном режиме на парковочном месте.
[0005] Кроме того, может возникнуть ситуация, когда в качестве информации о парковочном месте были зарегистрированы характерные элементы стоящего объекта, способного к перемещению, например, велосипеда и горшка с растением, а затем этот стоящий объект был перемещен в то время, когда транспортное средство выполняет парковку в автономном режиме. В этой ситуации данные о зарегистрированных характерных элементах стоящего объекта, способного к перемещению, не могут быть получены в тот промежуток времени, когда транспортное средство выполняет парковку в автономном режиме. В результате парковка транспортного средства в автономном режиме не может быть осуществлена.
[0006] Если устройство помощи при парковке транспортного средства выполнено с возможностью регистрации характерных элементов стоящего объекта в качестве информации о парковочном месте так, как описано выше, то парковка транспортного средства в автономном режиме на этом парковочном месте не может быть выполнена при изменении ситуации вокруг транспортного средства и парковочного места в промежутке между временем регистрации характерных элементов и временем парковки транспортного средства в автономном режиме.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Это изобретение создано для решения проблем, описанных выше. Целью изобретения является создание устройства помощи при парковке транспортного средства, которое может осуществить парковку транспортного средства 100 в автономном режиме на парковочном месте, даже в том случае, когда ситуация вокруг транспортного средства и парковочного места изменяется в промежутке между временем регистрации характерных элементов и временем парковки транспортного средства в автономном режиме.
[0008] В соответствии с изобретением, устройство помощи при парковке транспортного средства содержит по меньшей мере одну камеру и электронный блок управления. По меньшей мере одна камера установлена на транспортном средстве для получения изображений пространства, окружающего транспортное средство. Электронный блок управления (ЭБУ) может выполнять управление помощью при парковке для осуществления парковки транспортного средства в автономном режиме на парковочном месте с использованием информации о парковочном месте, полученной в качестве информации о парковочном месте из изображения, сделанного, по меньшей мере, одной камерой.
[0009] Электронный блок управления получает изображение парковочного места, сделанное по меньшей мере одной камерой, в качестве изображения с камеры в тот момент, когда транспортное средство останавливается около парковочного места. Кроме того, электронный блок управления получает характерные элементы поверхности земли на въезде в парковочное место как о характерных элементах на въезде, полученных из изображения с камеры. В этом случае электронный блок управления выполняет управление помощью при парковке с использованием информации о парковочном месте, полученной из изображения с камеры, полученного в текущий момент времени. Кроме того, электронный блок управления регистрирует информацию о парковочном месте, содержащую информацию о характерных элементах на въезде на него в качестве информации о характерных элементах на въезде.
[0010] Электронный блок управления получает изображение с камеры, когда транспортное средство останавливается около неидентифицированного парковочного места после того, как электронный блок управления зарегистрировал информацию о парковочном месте. Кроме того, электронный блок управления получает характерные элементы поверхности земли на въезде в неидентифицированное парковочное место в качестве о не подвергнутых сопоставлению характерных элементах на въезде из изображения с камеры, полученном в текущий момент времени. В этом случае электронный блок управления определяет, является ли неидентифицированное парковочное место зарегистрированным парковочным местом путем сравнения информации о не подвергнутых сопоставлению характерных элементах на въезде с информацией о характерных элементах на въезде, причем зарегистрированное парковочное место представляет собой парковочное место, соответствующее информации о зарегистрированном парковочном месте. Электронный блок управления выполняет управление помощью при парковке с использованием полученной в текущий момент времени информации о парковочном месте и информации о зарегистрированном парковочном месте, когда электронный блок управления определяет, что неидентифицированное парковочное место является зарегистрированным парковочным местом.
[0011] В соответствии с изобретением, в качестве информации о характерных элементах на въезде регистрируется информация о характерных элементах на изображении с камеры поверхности земли в парковочном месте и/или вокруг него, а не информация о характерных элементах на изображении с камеры стоящего(-их) объекта(-ов) в парковочном месте и/или вокруг него. Изображение с камеры поверхности земли в парковочном месте и/или вокруг него изменяется в незначительной степени, даже если ситуация вокруг транспортного средства и/или парковочного места изменяется в промежутке между временем регистрации информации о характерных элементах на въезде и временем, когда транспортное средство перемещается и осуществляет парковку в автономном режиме. Следовательно, можно определить, являются ли характерные элементы, полученные перед тем, как транспортное средство перемещалось и осуществляло парковку в автономном режиме, теми же характерными элементами, которые зарегистрированы в качестве информации о характерных элементах на въезде, даже если ситуация вокруг транспортного средства и/или парковочного места для парковки изменяется в промежутке между временем, когда транспортное средство перемещается и осуществляет парковку в автономном режиме и временем регистрации информации о характерных элементах на въезде. В результате, если информация, полученная во время регистрации в качестве информации о характерных элементах на въезде, может быть использована для перемещения и осуществления парковки транспортного средства на парковочном месте в это время, можно перемещать и осуществлять парковку в автономном режиме на парковочном месте, используя информацию, полученную в момент регистрации информации о характерных элементах на въезде, также как и информацию, полученную во время перемещения транспортного средства в автономном режиме. Таким образом, может быть произведена точная парковка транспортного средства на парковочном месте в автономном режиме.
[0012] Согласно одному из аспектов изобретения, электронный блок управления может разделять изображение с камеры на предварительно заданные выделенные области. Кроме того, электронный блок управления может получать, по меньшей мере, один характерный элемент из каждой из предварительно заданных выделенных областей. В этом случае характерные элементы на въезде могут представлять собой характерные элементы, полученные из предварительно заданных выделенных областей.
[0013] В соответствии с этим аспектом изобретения, характерные элементы на въезде получаются равномерно со всего изображения с камеры въезда на парковочное место. Таким образом, можно с уверенностью определить, что парковочное место, около которого остановилось транспортное средство, является зарегистрированным парковочным местом, когда транспортное средство останавливается около парковочного места, зарегистрированного в качестве зарегистрированного парковочного места.
[0014] Согласно другому аспекту изобретения, предварительно заданные выделенные области могут иметь одинаковые размеры.
[0015] Согласно еще одному аспекту изобретения, предварительно заданные выделенные области могут не перекрывать друг друга.
[0016] Согласно еще одному другому аспекту изобретения, электронный блок управления может получать большее число характерных элементов на въезде из той предварительно заданной выделенной области, которая находится относительно близко к середине въезда на парковочное место, чем из той предварительно заданной выделенной области, которая расположена относительно удаленно от середины въезда на парковочное место.
[0017] В соответствии с этим аспектом изобретения большее число характерных элементов на въезде получают из изображения с камеры поверхности земли вблизи середины въезда на парковочное место. Таким образом, можно с уверенностью определить, что парковочное место, около которого остановилось транспортное средство, является зарегистрированным парковочным местом, когда транспортное средство останавливается около парковочного места, зарегистрированного в качестве зарегистрированного парковочного места.
[0018] Согласно еще одному аспекту изобретения электронный блок управления может получать предварительно заданное количество характерных элементов на въезде из каждой предварительно заданной выделенной области. Кроме того, электронный блок управления может получать большее число характерных элементов из предварительно заданной выделенной области, из которой электронный блок управления получил предварительно заданное число характерных элементов на въезде, когда электронный блок управления не может получить предварительно заданное число характерных элементов на въезде из одной или более предварительно заданных выделенных областей.
[0019] В соответствии с этим аспектом изобретения, даже если предварительно заданное число характерных элементов на въезде не может быть получено из одной или более предварительно заданных выделенных областей, можно получить такое же или практически такое же число характерных элементов на въезде как сумму всех предварительно заданных чисел. Таким образом, можно с уверенностью определить, что парковочное место, около которого остановилось транспортное средство, является зарегистрированным парковочным местом, когда транспортное средство останавливается около парковочного места, зарегистрированного в качестве зарегистрированного парковочного места.
[0020] В соответствии с еще одним аспектом изобретения, информация о характерных элементах на въезде может содержать информацию о характеристике яркости каждого из характерных элементов на въезде на изображении с камеры.
[0021] Согласно этому аспекту изобретения, характеристики яркости используются для определения того, является ли парковочное место, около которого останавливается транспортное средство, зарегистрированным парковочным местом.
[0022] В соответствии с еще одним аспектом изобретения информация о характерных элементах на въезде может содержать информацию о местоположении каждого из характерных элементов на въезде относительно предварительно определенного местоположения на парковочном месте.
[0023] Согласно этому аспекту изобретения, местоположения характерных элементов на въезде относительно предварительно определенного местоположения на парковочном месте используются для определения того, является ли парковочное место, около которого останавливается транспортное средство, зарегистрированным парковочным местом.
[0024] В соответствии с еще одним аспектом изобретения, электронный блок управления может выполнять управление помощью при парковке с использованием полученной в текущий момент времени информации о парковочном месте, когда электронный блок управления определяет, что неидентифицированное парковочное место не является зарегистрированным парковочным местом.
[0025] Согласно еще одному аспекту изобретения, по меньшей мере, одна камера может содержать переднюю камеру, которая получает изображение вида спереди транспортного средства, заднюю камеру, которая получает изображение вида позади транспортного средства, левую камеру, которая получает изображение вида с левой стороны транспортного средства, и правую камеру, которая получает изображение вида с правой стороны транспортного средства.
[0026] В соответствии с еще одним аспектом изобретения, электронный блок управления может выполнять управление помощью при парковке с использованием полученной в текущий момент времени информации о парковочном месте в том случае, если электронный блок управления определяет, что неидентифицированное парковочное место не является зарегистрированным парковочным местом.
[0027] Согласно еще одному аспекту изобретения, по меньшей мере, одна камера может содержать переднюю камеру, которая получает изображение вида спереди транспортного средства, заднюю камеру, которая получает изображение вида позади транспортного средства, левую камеру, которая получает изображение вида с левой стороны транспортного средства, и правую камеру, которая получает изображение вида с правой стороны транспортного средства.
[0028] Элементы изобретения не ограничены элементами вариантов осуществления изобретения и модифицированных примеров изобретения, приведенных в описании и на чертежах. Из вариантов осуществления изобретения и модифицированных примеров изобретения могут быть легко поняты другие цели, признаки и сопутствующие преимущества изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0029] ФИГ. 1 представляет собой вид, демонстрирующий устройство помощи при парковке транспортного средства в соответствии с одним из вариантов осуществления изобретения и транспортное средство, к которому применяется устройство помощи при парковке транспортного средства в соответствии с этим вариантом осуществления изобретения.
ФИГ. 2 представляет собой вид, демонстрирующий ультразвуковое локационное устройство и диапазоны обнаружения этого ультразвукового локационного устройства.
ФИГ. 3 представляет собой вид, изображающий устройство камеры с датчиками и диапазоны обнаружения устройства камеры с датчиками.
На ФИГ. 4 показан пример парковочного места.
ФИГ. 5 представляет собой вид передней области и задней области.
ФИГ. 6 представляет собой вид левой области и правой области.
ФИГ. 7 представляет собой вид, демонстрирующий характерный элемент.
ФИГ. 8 - вид области парковки.
ФИГ. 9А-9D представляют собой виды, показанные на экранах дисплеев.
ФИГ. 10A-10C представляют собой виды, показанные на экранах дисплеев.
ФИГ. 11 представляет собой вид, используемый для описания операций, выполняемых устройством помощи при парковке транспортного средства в соответствии с одним из вариантов осуществления изобретения.
ФИГ. 12 представляет собой вид, применяемый для описания операций, выполняемых устройством помощи при парковке транспортного средства в соответствии с одним из вариантов осуществления изобретения.
ФИГ. 13 представляет собой вид, используемый для описания операций, выполняемых устройством помощи при парковке транспортного средства в соответствии с одним из вариантов осуществления изобретения.
На ФИГ. 14 показан вид характерных элементов на въезде.
ФИГ. 15 представляет собой вид, используемый для описания операций, выполняемых устройством помощи при парковке транспортного средства в соответствии с одним из вариантов осуществления изобретения.
ФИГ. 16 представляет собой вид, используемый для описания операций, выполняемых устройством помощи при парковке транспортного средства в соответствии с одним из вариантов осуществления изобретения.
ФИГ. 17 представляет собой вид, используемый для описания операций, выполняемых устройством помощи при парковке транспортного средства в соответствии с одним из вариантов осуществления изобретения.
ФИГ. 18 представляет собой вид, используемый для описания операций, выполняемых устройством помощи при парковке транспортного средства в соответствии с одним из вариантов осуществления изобретения.
ФИГ. 19А-19C представляют собой виды, показанные на экранах дисплеев.
ФИГ. 20 представляет собой вид блок-схемы процедуры, выполняемой ЦП ЭБУ, показанным на ФИГ. 1.
ФИГ. 21 представляет собой вид блок-схемы процедуры, выполняемой ЦП.
ФИГ. 22 представляет собой вид блок-схемы процедуры, выполняемой ЦП.
ФИГ. 23 представляет собой вид блок-схемы процедуры, выполняемой ЦП.
РАСКРЫТИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0030] Устройство помощи при парковке транспортного средства в соответствии с одним из вариантов осуществления настоящего изобретения будет подробно раскрыто ниже со ссылкой на чертежи. На ФИГ. 1 показано устройство помощи при парковке транспортного средства 10 в соответствии с вариантом осуществления изобретения и транспортное средство 100, к которому применено устройство 10 помощи при парковке транспортного средства.
[0031] Как показано на ФИГ. 1, устройство 10 помощи при парковке транспортного средства включает в себя ЭБУ 90. ЭБУ означает электронный блок управления. ЭБУ 90 включает в себя микрокомпьютер в качестве основного компонента. Микрокомпьютер включает в себя ЦП, ПЗУ, ОЗУ, энергонезависимую память и интерфейс. ЦП сконфигурирован или запрограммирован с возможностью осуществления различных функций посредством выполнения инструкций, программ, или алгоритмов, хранящихся в ПЗУ.
[0032] На транспортном средстве 100 установлено устройство 11 для создания движущей силы транспортного средства, тормозное устройство 12 и рулевое устройство 13. Устройство 11 для создания движущей силы транспортного средства генерирует движущую силу для приведения в движение транспортного средства 100 и прикладывает эту движущую силу к колесам, которые должны приводить в движение транспортное средство 100. Устройство 11 для создания движущей силы транспортного средства представляет собой, например, двигатель внутреннего сгорания и/или электрический двигатель. Тормозное устройство 12 прикладывает усилия торможения к колесам транспортного средства 100 для того, чтобы затормозить транспортное средство 100. Рулевое устройство 13 прикладывает крутящий момент рулевого управления к колесам транспортного средства 100, для управления этим транспортным средством 100.
[0033] Устройство 11 для создания движущей силы транспортного средства, тормозное устройство 12 и рулевое устройство 13 электрически соединены с ЭБУ 90. ЭБУ 90 управляет операциями, выполняемыми устройством 11 для создания движущей силы транспортного средства, для управления движущей силой, прикладываемой к колесам, для приведения в движение транспортного средства 100. Кроме того, ЭБУ 90 управляет операциями, выполняемыми тормозным устройством 12, для управления усилиями торможения, прикладываемыми к колесам транспортного средства 100. Помимо этого, ЭБУ 90 управляет операциями, выполняемыми рулевым устройством 13 для управления крутящим моментом рулевого управления, прикладываемым к колесам для рулевого управления транспортным средством 100.
[0034] <Датчики>
Устройство 10 помощи при парковке транспортного средства содержит датчик 21 величины работы педали акселератора, датчик 22 величины работы педали тормоза, датчик 23 угла поворота рулевого колеса, датчик 24 крутящего момента рулевого управления, датчик 25 скорости движения транспортного средства, датчик 26 скорости рыскания, датчик 27 продольного ускорения, датчик 28 бокового ускорения, ультразвуковое локационное устройство 30, устройство 40 камеры с датчиками и дисплей 50.
[0035] Датчик 21 величины работы педали акселератора электрически соединен с ЭБУ 90. ЭБУ 90 определяет величину AP воздействия, прикладываемого к педали 14 акселератора, с помощью датчика 21 величины работы педали акселератора, и получает величину AP в качестве величины AP работы педали акселератора. ЭБУ 90 управляет операциями, выполняемыми устройством 11 для создания движущей силы транспортного средства, для управления движущей силой, прикладываемой к колесам, для приведения в движение транспортного средства 100, от устройства 11 для создания движущей силы транспортного средства, в зависимости от полученной величины AP работы педали акселератора.
[0036] Датчик 22 величины работы педали тормоза электрически соединен с ЭБУ 90. ЭБУ 90 определяет величину BP воздействия, прикладываемого к педали 15 тормоза с помощью датчика 22 величины работы педали тормоза, и получает величину BP в качестве величины работы педали тормоза. ЭБУ 90 управляет операциями, выполняемыми тормозным устройством 12 для управления усилиями торможения, прикладываемыми к колесам транспортного средства 100 со стороны тормозного устройства 12 в зависимости от полученной величины BP работы педали тормоза.
[0037] Датчик 23 угла поворота рулевого колеса электрически соединен с ЭБУ 90. ЭБУ 90 определяет угол θst поворота рулевого колеса 16 относительно центрального положения с помощью датчика 23 угла поворота рулевого колеса, и получает угол θst в качестве угла θst поворота рулевого колеса.
[0038] Датчик 24 крутящего момента рулевого управления электрически соединен с ЭБУ 90. ЭБУ 90 определяет крутящий момент TQst, прилагаемый к рулевому валу 17 водителем транспортного средства 100 с помощью датчика 24 крутящего момента рулевого управления, и получает крутящий момент TQst в качестве крутящего момента TQst рулевого управления.
[0039] ЭБУ 90 управляет действиями устройства 13 рулевого управления для приложения крутящего момента рулевого управления к колесам для управления транспортным средством 100 с помощью устройства 13 рулевого управления, в зависимости от полученного угла θst поворота рулевого колеса и полученного крутящего момента TQst рулевого управления.
[0040] Датчик 25 скорости движения транспортного средства электрически соединен с ЭБУ 90. ЭБУ 90 определяет скорость Vrot вращения колес транспортного средства 100 с помощью датчика 25 скорости движения транспортного средства, и получает скорость Vrot вращения колес транспортного средства для транспортного средства 100. ЭБУ 90 определяет скорость SPD движения транспортного средства 100 в качестве скорости SPD движения транспортного средства на основании полученных скоростей Vrot вращения колес транспортного средства 100.
[0041] Датчик 26 скорости рыскания электрически соединен с ЭБУ 90. ЭБУ 90 определяет скорость YR рыскания транспортного средства 100 с помощью датчика 26 скорости рыскания, и получает скорость YR рыскания транспортного средства 100 в качестве скорости YR рыскания транспортного средства.
[0042] Датчик 27 продольного ускорения электрически соединен с ЭБУ 90. ЭБУ 90 определяет продольное ускорение Gx транспортного средства 100 с помощью датчика 27 продольного ускорения, и получает продольное ускорение Gx в качестве продольного ускорения Gx транспортного средства.
[0043] Датчик 28 бокового ускорения электрически соединен с ЭБУ 90. ЭБУ 90 определяет поперечное ускорение Gy транспортного средства 100 с помощью датчика 28 бокового ускорения, и получает боковое ускорение Gy в качестве бокового ускорения Gy транспортного средства.
[0044] Ультразвуковое локационное устройство 30 включает в себя датчики расстояния до препятствия, начиная с первого датчика 301 по двенадцатый датчик 312 расстояния до препятствия.
[0045] Как показано на ФИГ. 2, первый датчик 301 расстояния до препятствия установлен на левом конце переднего концевого участка транспортного средства 100 для того, чтобы излучать звуковые волны вперед влево. Второй датчик 302 расстояния до препятствия установлен на переднем концевом участке транспортного средства 100 между левым концом переднего концевого участка транспортного средства 100 и серединой переднего концевого участка транспортного средства 100 так, чтобы излучать звуковые волны вперед прямо. Третий датчик 303 расстояния до препятствия установлен на правом конце переднего концевого участка транспортного средства 100 так, чтобы излучать звуковые волны вперед вправо. Четвертый датчик 304 расстояния до препятствия установлен на переднем концевом участке транспортного средства 100 между правым концом переднего концевого участка транспортного средства 100 и серединой переднего концевого участка транспортного средства 100 так, чтобы излучать звуковые волны вперед прямо.
[0046] Пятый датчик 305 расстояния до препятствия установлен на левом конце заднего концевого участка транспортного средства 100 так, чтобы излучать звуковые волны назад влево. Шестой датчик 306 расстояния до препятствия установлен на заднем концевом участке транспортного средства 100 между левым концом заднего концевого участка транспортного средства 100 и серединой заднего концевого участка транспортного средства 100 так, чтобы излучать звуковые волны назад прямо. Седьмой датчик 307 расстояния до препятствия установлен на правом конце заднего концевого участка транспортного средства 100 так, чтобы излучать звуковые волны назад вправо. Восьмой датчик 308 расстояния до препятствия установлен на заднем концевом участке транспортного средства 100 между правым концом заднего концевого участка транспортного средства 100 и серединой заднего концевого участка транспортного средства 100 так, чтобы излучать звуковые волны назад прямо.
[0047] Девятый датчик 309 расстояния до препятствия установлен на передней стороне левого бокового участка транспортного средства 100 так, чтобы излучать звуковые волны влево прямо. Десятый датчик 310 расстояния до препятствия установлен на задней стороне левого бокового участка транспортного средства 100, чтобы излучать звуковые волны влево и прямо. Одиннадцатый датчик 311 расстояния до препятствия установлен на передней стороне правого бокового участка транспортного средства 100 так, чтобы излучать звуковые волны вправо прямо. Двенадцатый датчик 312 расстояния до препятствия установлен на задней стороне правого бокового участка транспортного средства 100 так, чтобы излучать звуковые волны вправо прямо.
[0048] Датчики расстояния до препятствия, начиная с первого датчика 301 расстояния до препятствия по двенадцатый датчик 312 расстояния до препятствия получают звуковые волны, отражаемые объектами.
[0049] Ультразвуковое локационное устройство 30 электрически соединено с ЭБУ 90. Ультразвуковое локационное устройство 30 посылает информацию о (i) звуковых волнах, излучаемых датчиками расстояния до препятствия, начиная с первого датчика 301 расстояния до препятствия по двенадцатый датчик 312 расстояния до препятствия и о (ii) звуковых волнах, полученных датчиками расстояния до препятствия, начиная с первого датчика 301 расстояния до препятствия по двенадцатый датчик 312 расстояния до препятствия. ЭБУ 90 получает информацию об объектах вокруг транспортного средства 100 как информацию OBJ об объектах, основанную на информации, отправленной ультразвуковым локационным устройством 30. Далее по тексту информация, отправляемая ультразвуковым локационным устройством 30, будет называться «информация SON ультразвукового локационного устройства».
[0050] Направление Dx, показанное на ФИГ. 2, является продольным направлением транспортного средства 100. Далее по тексту направление Dx будет называться «продольным направлением Dx транспортного средства». Направление Dy, показанное на ФИГ. 2 является поперечным направлением транспортного средства 100. Далее по тексту направление Dy будет называться «поперечным направлением Dy транспортного средства».
[0051] Устройство 40 камеры с датчиками включает в себя переднюю камеру 41, заднюю камеру 42, левую камеру 43 и правую камеру 44. Далее по тексту, камеры 45 включают в себя переднюю камеру 41, заднюю камеру 42, левую камеру 43 и правую камеру 44.
[0052] Как показано на ФИГ. 3, передняя камера 41 установлена в середине переднего концевого участка транспортного средства 100 для получения изображений вида впереди транспортного средства 100. Угол 41А поля зрения передней камеры 41 составляет около 180 градусов. Задняя камера 42 установлена в середине заднего концевого участка транспортного средства 100 для получения изображений вида сзади транспортного средства 100. Угол 42А поля зрения задней камеры 42 составляет около 180 градусов. Левая камера 43 установлена на левом боковом участке транспортного средства 100 для получения изображений вида слева от транспортного средства 100. Угол 43A поля зрения левой камеры 43 составляет около 180 градусов. Правая камера 44 установлена на правом боковом участке транспортного средства 100 для получения изображений вида справа от транспортного средства 100. Угол 44А поля зрения правой камеры 44 составляет около 180 градусов.
[0053] Устройство 40 камеры с датчиками электрически соединено с ЭБУ 90. ЭБУ 90 получает информацию об изображениях видов, полученных камерами 45 устройства 40 камеры с датчиками.
[0054] Далее по тексту информация об изображениях видов, полученных передней камерой 41, будет называться «информацией IMG1 переднего изображения». Также, информация об изображениях видов, полученных задней камерой 42, будет упоминаться как «информация IMG2 заднего изображения». Также, информация об изображениях видов, сделанных левой камерой 43, будет называться «информация IMG3 левого изображения». Также, информация об изображениях видов, сделанных правой камерой 44, будет называться как «информация IMG4 правого изображения». Кроме того, полученная в совокупности информация IMG1 переднего изображения, информация IMG2 заднего изображения, информация IMG3 левого изображения и информация IMG4 о правом изображении будет называться «информацией IMG изображения».
[0055] Устройство 10 помощи при парковке транспортного средства получает данные о характерных элементах F на основании информации IMG изображения, когда выполняется предварительно заданное условие. Характерный элемент F является предварительно определенной областью изображения, полученного каждой из камер 45, и имеющей уровень яркости, в значительной степени отличающийся от уровня яркости области, окружающей предварительно определенную область.
[0056] Например, когда камеры 45 получают изображения парковочного места 62, показанного на ФИГ. 4, полученные характерные элементы F представляют собой угловые участки бетонных блоков 63B, угловые участки поверхности земли 63 газона 63L и граничные участки между поверхностью земли 63 блока 63B и поверхностью земли 63 газона 63L.
[0057] Поверхность земли 63 парковочного места 62, показанная на ФИГ. 4, формируется поверхностью земли 63 бетона 63C, и поверхностью земли 63 газона 63L. Кроме того, около въезда 62ent на парковочное место 62 предусмотрены бетонные блоки 63B, закрывающие водосточные желоба. Таким образом, поверхность земли 63 въезда 62ent на парковочное место 62 формируется поверхностями блоков 63B.
[0058] Устройство 10 помощи при парковке транспортного средства получает данные о характерных элементах F в предварительно определенной области 71 поверхности земли 63, расположенной с передней стороны от транспортного средства 100 на основании информации IMG1 переднего изображения (см. ФИГ. 5). Далее по тексту характерные элементы F в предварительно определенной области 71 будут называться «передними характерными элементами F». Кроме того, устройство 10 помощи при парковке транспортного средства получает данные о характерных элементах F в предварительно определенной области 72 поверхности земли 63, расположенной с задней стороны транспортного средства 100 на основании информации IMG2 заднего изображения (см. ФИГ. 5). Далее по тексту, характерные элементы F в предварительно определенной области 72 будут называться «задними характерными элементами F». Кроме того, устройство 10 помощи при парковке транспортного средства получает данные о характерных элементах F в предварительно определенной области 73 поверхности земли 63, расположенной с левой стороны транспортного средства 100 на основании информации IMG3 левого изображения (см. ФИГ. 6). Далее по тексту характерные элементы F в предварительно определенной области 73 будут называться «левыми характерными элементами F3». Кроме того, устройство 10 помощи при парковке транспортного средства получает данные о характерных элементах F в предварительно определенной области 74 поверхности земли 63, расположенной с правой стороны транспортного средства 100 на основании информации IMG4 правого изображения (см. ФИГ. 6). Далее по тексту характерные элементы F в предварительно определенной области 74 будут называться «правыми характерными элементами F4».
[0059] Как показано на ФИГ. 5, предварительно определенная область 71 является областью, отделенной линией L711, линией L712, линией L713 и линией L714. Линия L711 простирается параллельно поперечному направлению Dy транспортного средства, проходя через точку, отстоящую вперед от передней камеры 41 на заранее заданное расстояние Dset. Линия L712 простирается параллельно поперечному направлению Dy транспортного средства, проходя через переднюю камеру 41. Линия L713 простирается параллельно продольному направлению Dx транспортного средства, проходя через точку, отстоящую влево от передней камеры 41 на заданное расстояние Dset. Линия L714 простирается параллельно продольному направлению Dx транспортного средства, проходя через точку, отстоящую вправо от передней камеры 41 на заданное расстояние Dset. Далее по тексту предварительно определенная область 71 будет называться «передней областью 71».
[0060] Передняя область 71 разделена на четыре части в поперечном направлении Dy транспортного средства и разделена пополам в продольном направлении Dx транспортного средства. Следовательно, передняя область 71 включает в себя восемь областей 71D. Другими словами, передняя область 71 разделена на восемь областей 71D, имеющих одинаковые размеры. Далее по тексту каждая из областей 71D будет называться «передней выделенной областью 71D». Также, каждая из двух передних выделенных областей 71D, расположенных на левом конце передней области 71 в поперечном направлении Dy транспортного средства, будет называться, как «левая концевая выделенная область 71D3». Дополнительно, каждая из двух передних выделенных областей 71D, расположенных на правом конце передней области 71 в поперечном направлении Dy транспортного средства, будет называться «правой концевой выделенной областью 71D4». Также, каждая из четырех передних выделенных областей 71D, расположенных в середине передней области 71 в поперечном направлении Dy транспортного средства, будет называться, как «средняя выделенная область 71D5».
[0061] Как показано на ФИГ. 5, предварительно заданная область 72 является областью, отделенной линией L721, линией L722, линией L723 и линией L724. Линия L721 простирается параллельно поперечному направлению Dy транспортного средства, проходя через заднюю камеру 42. Линия L722 простирается параллельно поперечному направлению Dy транспортного средства, проходя через точку, отстоящую назад от задней камеры 42 на заранее заданное расстояние Dset. Линия L723 простирается параллельно продольному направлению Dx транспортного средства, проходя через точку, отстоящую влево от задней камеры 42 на заранее заданное расстояние Dset. Линия L724 простирается параллельно продольному направлению Dx транспортного средства, проходя через точку, отстоящую вправо от задней камеры 42 на заранее заданное расстояние Dset. Далее по тексту предварительно заданная область 72 будет называться «задней областью 72».
[0062] Задняя область 72 разделена на четыре части в поперечном направлении Dy транспортного средства и разделена пополам в продольном направлении Dx транспортного средства. Таким образом, задняя область 72 включает в себя восемь областей 72D. Другими словами, задняя область 72 разделена на восемь областей 72D, имеющих одинаковые размеры. Далее по тексту каждая из областей 72D будет называться «задней выделенной областью 72D». Кроме того, каждая из двух задних выделенных областей 72D, расположенных на левом конце задней области 72 в поперечном направлении Dy транспортного средства, будет называться, как «левая концевая выделенная область 72D3». Дополнительно, каждая из двух задних выделенных областей 72D, расположенных на правом конце задней области 72 в поперечном направлении Dy транспортного средства, будет называться, как «правая концевая выделенная область 72D4». Дополнительно, каждая из четырех задних выделенных областей 72D, расположенных в середине задней области 72 в поперечном направлении Dy транспортного средства, будет называться «средней выделенной областью 72D5».
[0063] Как показано на ФИГ. 6, предварительно заданная область 73 является областью, отделенной линией L731, линией L732, линией L733 и линией L734. Линия L731 простирается параллельно поперечному направлению Dy транспортного средства, проходя через точку, отстоящую в направлении вперед от левой камеры 43 на заданное расстояние Dset. Линия L732 простирается параллельно поперечному направлению Dy транспортного средства, проходя через точку, отстоящую в направлении назад от левой камеры 43 на заданное расстояние Dset. Линия L733 простирается параллельно продольному направлению Dx транспортного средства, проходя через точку, отстоящую в направлении влево от левой камеры 43 на заданное расстояние Dset. Линия L734 простирается параллельно продольному направлению Dx транспортного средства, проходя через левую камеру 43. Далее по тексту предварительно определенная область 73 будет называться «левой областью 73».
[0064] Левая область 73 разделена на четыре части в продольном направлении Dx транспортного средства и разделена пополам в поперечном направлении Dy транспортного средства. Таким образом, левая область 73 включает в себя восемь областей 73D. Другими словами, левая область 73 разделена на восемь областей 73D, имеющих одинаковые размеры. Далее по тексту каждая из областей 73D будет называться «левой выделенной областью 73D». Кроме того, каждая из двух левых выделенных областей 73D, расположенных на переднем конце левой области 73 в продольном направлении Dx транспортного средства, будет называться, как «передняя концевая выделенная область 73D1». Также, каждая из двух левых выделенных областей 73D, расположенных на заднем конце левой области 73 в продольном направлении Dx транспортного средства, будет называться как «задняя концевая выделенная область 73D2». Дополнительно, каждая из четырех левых выделенных областей 73D, расположенных в середине левой области 73 в продольном направлении Dx транспортного средства, будет называться как «средняя выделенная область 73D5».
[0065] Как показано на ФИГ. 6, предварительно заданная область 74 является областью, отделенной линией L741, линией L742, линией L743 и линией L744. Линия L741 простирается параллельно поперечному направлению Dy транспортного средства, проходя через точку, отстоящую в направлении вперед от правой камеры 44 на заданное расстояние Dset. Линия L742 простирается параллельно поперечному направлению Dy транспортного средства, проходя через точку, отстоящую в направлении назад от правой камеры 44 на заданное расстояние Dset. Линия L743 простирается параллельно продольному направлению Dx транспортного средства, проходя через правую камеру 44. Линия L744 простирается параллельно продольному направлению Dx транспортного средства, проходя через точку, отстоящую прямо от правой камеры 44 на заданное расстояние Dset. Далее по тексту предварительно определенная область 74 будет называться «правой областью 74».
[0066] Правая область 74 разделена на четыре части в продольном направлении Dx транспортного средства и разделена пополам в поперечном направлении Dy транспортного средства. Таким образом, правая область 74 включает в себя восемь областей 74D. Другими словами, правая область 74 разделена на восемь областей 74D, имеющих одинаковые размеры. Далее по тексту каждая из областей 74D будет называться «правой выделенной областью 74D». Кроме того, каждая из двух правых выделенных областей 74D, расположенных на переднем конце правой области 74 в продольном направлении Dx транспортного средства, будет называться как «передняя концевая выделенная область 74D1». Также, каждая из двух правых выделенных областей 74D, расположенных на заднем конце правой области 74 в продольном направлении Dx транспортного средства, будет называться как «задняя концевая выделенная область 74D2». Дополнительно, каждая из четырех правых выделенных областей 74D, расположенных в середине правой области 74 в продольном направлении Dx транспортного средства, будет называться как «средняя выделенная область 74D5».
[0067] Как показано на ФИГ. 7, если изображение каждого из характерных элементов F, полученное камерами 45, преобразуется в изображение в горизонтальной проекции, то преобразованное изображение представляет собой квадратную область 75, отделенную сторонами заданной длины Lset. Если выполняется предварительно заданное условие, то устройство 10 помощи при парковке транспортного средства делит каждый из характерных элементов F на двадцать пять квадратных областей 75D, имеющих одинаковые размеры, и определяет значения LUM яркости областей 75D. Затем устройство 10 помощи при парковке транспортного средства определяет значения ΔLUM путем вычитания среднего значения LUMave, вычисленного для полученных значений LUM яркости, из каждого значения яркости LUM (ΔLUM = LUM - LUMave). Таким образом, устройство 10 помощи при парковке транспортного средства определяет величины разности между значениями LUM яркости характерного элемента F на основании значений ΔLUM. После чего устройство 10 помощи при парковке транспортного средства получает характеристику полученных величин разности в качестве информации CT характеристики яркости. По существу, если выполняется заранее заданное условие, то устройство 10 помощи при парковке транспортного средства получает характеристику яркости каждого из изображений характерных элементов F, снятых камерами 45, а полученные характеристики яркости применяются затем в качестве информации CT характеристики яркости.
[0068] Дисплей 50 предусмотрен в том месте транспортного средства 100, где его может видеть водитель. В этом варианте осуществления изобретения дисплей 50 представляет собой дисплей так называемого навигационного устройства.
[0069] Дисплей 50 электрически соединен с ЭБУ 90. ЭБУ 90 может вызывать выведение на экран дисплея 50 различных изображений. В этом варианте осуществления изобретения ЭБУ 90 может вызвать вывод на экран дисплея 50 изображения 51C с камеры, изображение 51P вида сверху, изображение 51M переключателя помощи при парковке, изображение 52M главного переключателя регистрации, изображение 52S выбора области парковки, изображение 52 линейной разметки области парковки площадки, изображение 53 кнопки настройки, изображение 54 кнопки начала регистрации, изображение 55 кнопки регистрации, изображение 56 кнопки начала парковки, изображение 57 кнопки смещения и изображение 58 кнопки регулировки угла.
[0070] Изображение 51С с камеры представляет собой изображение, снятое любой из камер 45.
[0071] Изображение 51P вида сверху представляет собой изображение, включающее изображение вида сверху транспортного средства и изображение окружающего транспортное средство пространства. Изображение вида сверху транспортного средства представляет собой изображение, отображающее транспортное средство 100, если смотреть на него вертикально сверху. Изображение окружающего транспортное средство пространства представляет собой изображение, отображающее окружающее транспортное средство 100 пространство, если смотреть на него вертикально сверху. Изображение окружающего транспортное средство пространства включает в себя, по меньшей мере изображение парковочного места 62. Вид сверху транспортного средства и окружающего транспортное средство пространства формируются с помощью ЭБУ 90 на основании информации IMG изображения.
[0072] Изображение 51M переключателя помощи при парковке представляет собой изображение, отображающее переключатель помощи при парковке, к которому водитель может применить сенсорное воздействие для того, чтобы вызвать в устройстве 10 помощи при парковке транспортного средства начало выполнения управления помощью при парковке, как описано ниже. В этом варианте осуществления изобретения переключатель помощи при парковке отображается на дисплее 50 как изображение 51M переключателя помощи при парковке. С этой целью переключатель помощи при парковке может быть предусмотрен на транспортном средстве 100 как переключатель, которым водитель может физически управлять.
[0073] Изображение 52M главного переключателя регистрации представляет собой изображение, отображающее главный переключатель регистрации, к которому водитель может применить сенсорное воздействие для регистрации или сохранения в памяти информации Ipark о парковочном месте в устройстве 10 помощи при парковке транспортного средства посредством управления помощью при парковке.
[0074] Как показано на ФИГ. 9C, изображение 52S выбора области парковки включает в себя изображение 52SLa выбора левой двойной области парковки, изображение 52SLb выбора левой параллельной области парковки, изображение 52SRa выбора правой двойной области парковки и изображение 52SRb выбора правой параллельной области парковки.
[0075] Изображение 52SLa выбора левой двойной области парковки представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы выбрать область парковки 61 парковочного места 62, расположенную с левой стороны от транспортного средства 100, где ориентация транспортного средства 100, припаркованного в этой области парковки 61, была изменена на 90 градусов по сравнению с ориентацией транспортного средства 100, остановившегося рядом с парковочным местом 62. Область парковки 61 представляет собой область, пространство или зону, в которой производится парковка транспортного средства 100 посредством управления помощью при парковке. Как показано на ФИГ. 8, область парковки 61 установлена в парковочном месте 62. Изображение 52SLb выбора левой параллельной области парковки представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы выбрать область парковки 61 парковочного места 62, расположенную с левой стороны от транспортного средства 100, где ориентация транспортного средства 100, припаркованного в этой области парковки 61, не изменяется по сравнению с ориентацией транспортного средства 100, остановившегося рядом с парковочным местом 62. Изображение 52SRa выбора правой двойной области парковки представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы выбрать область парковки 61 парковочного места 62, расположенную с правой стороны от транспортного средства 100, где ориентация транспортного средства 100, припаркованного в этой области парковки 61, была изменена на 90 градусов по сравнению с ориентацией транспортного средства 100, остановившегося рядом с парковочным местом 62. Изображение 52SRb выбора правой параллельной области парковки представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы выбрать область парковки 61 парковочного места 62, расположенную с правой стороны от транспортного средства 100, где ориентация транспортного средства 100, припаркованного в этой области парковки 61, не изменяется по сравнению с ориентацией транспортного средства 100, остановившегося рядом с парковочным местом 62.
[0076] Если отсутствует область парковки 61 парковочного места 62, расположенная с левой стороны от транспортного средства 100, где ориентация транспортного средства 100, припаркованного в этой области парковки 61, изменяется на 90 градусов по сравнению с ориентацией транспортного средства 100, остановившегося рядом с парковочным местом 62, то изображение 52SLa выбора левой двойной области парковки не отображается на экране дисплея 50 или отображается на экране дисплея 50 с низким или пониженным уровнем яркости. Аналогично, если отсутствует область парковки 61 парковочного места 62, расположенная с левой стороны от транспортного средства 100, где ориентация транспортного средства 100, припаркованного в этой области парковки 61, не изменяется по сравнению с ориентацией транспортного средства 100, остановившегося рядом с парковочным местом 62, то изображение 52SLb выбора левой параллельной области парковки не отображается на экране дисплея 50 или отображается на экране дисплея 50 с низким или пониженным уровнем яркости. И аналогично, если отсутствует область парковки 61 парковочного места 62, расположенная с правой стороны от транспортного средства 100, где ориентация транспортного средства 100, припаркованного в этой области парковки 61, была изменена на 90 градусов по сравнению с ориентацией транспортного средства 100, остановившегося рядом с парковочным местом 62, то изображение 52SRa выбора правой двойной области парковки не отображается на экране дисплея 50 или отображается на экране дисплея 50 с низким или пониженным уровнем яркости. Аналогично, если отсутствует область парковки 61 парковочного места 62, расположенная с правой стороны от транспортного средства 100, где ориентация транспортного средства 100, припаркованного в этой области парковки 61, не изменяется по сравнению с ориентацией транспортного средства 100, остановившегося рядом с парковочным местом 62, то изображение 52SRb выбора правой параллельной области парковки не отображается на экране дисплея 50 или отображается на экране дисплея 50 с низким или пониженным уровнем яркости.
[0077] Даже если водитель применяет сенсорное воздействие к изображению 52S выбора области парковки, отображаемому с пониженным уровнем яркости, то несмотря на приложенное к этому изображению сенсорное воздействие, ЭБУ 90 не определяет, что область парковки 61, соответствующая изображению 52S выбора области парковки, была выбрана.
[0078] Изображение 52 линейной разметки области парковки представляет собой изображение, отображающее область парковки 61.
[0079] Изображение 53 кнопки настройки представляет собой изображение, отображающее кнопку настройки, к которой водитель может применить сенсорное воздействие, чтобы установить или исправить или определить область парковки 61, где водитель желает припарковать транспортное средство 100 в процессе управления помощью при парковке.
[0080] Изображение 54 кнопки начала регистрации представляет собой изображение, отображающее кнопку начала регистрации, к которой водитель может применить сенсорное воздействие, чтобы вызвать в устройстве 10 помощи при парковке транспортного средства начало выполнения процесса первого парковочного движения из описанного ниже процесса управления помощью при парковке.
[0081] Изображение 55 кнопки регистрации представляет собой изображение, отображающее кнопку регистрации, к которой водитель может применить сенсорное воздействие, чтобы инициировать в устройстве 10 помощи при парковке транспортного средства процесс регистрации (в частности, в ОЗУ ЭБУ 90) информации Ipark о парковочном месте, полученной при управлении помощью при парковке. Информация Ipark о парковочном месте представляет собой информацию о парковочном месте 62, используемую устройством 10 помощи при парковке транспортного средства для парковки транспортного средства 100 в автономном режиме на парковочном месте 62.
[0082] Изображение 56 кнопки начала парковки представляет собой изображение, отображающее кнопку начала парковки, к которой водитель может применить сенсорное воздействие, чтобы вызвать в устройстве 10 помощи при парковке транспортного средства начало выполнения управления помощью при парковке с целью парковки транспортного средства 100 в области парковки 61, зарегистрированной в устройстве 10 помощи при парковке транспортного средства.
[0083] Изображение 57 кнопки смещения включает изображение 57U кнопки смещения вверх, изображение 57D кнопки смещения вниз, изображение 57L кнопки смещения влево и изображение 57R кнопки смещения вправо. Изображение 57U кнопки смещения вверх представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы сместить изображение 52 линии разметки парковочной площадки вверх на экране дисплея 50. Изображение 57D кнопки смещения вниз представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы сместить изображение 52 линии разметки области парковки вниз на экране дисплея 50. Изображение 57L кнопки смещения влево представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы сместить изображение 52 линии разметки области парковки влево на экране дисплея 50. Изображение 57R кнопки смещения вправо представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы сместить изображение 52 линии разметки области парковки вправо на экране дисплея 50.
[0084] Изображение 58 кнопки регулировки угла включает в себя изображение 58A кнопки регулировки угла против часовой стрелки и изображение 58B кнопки регулировки угла по часовой стрелке. Изображение 58A кнопки смещения против часовой стрелки представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы сместить изображение 52 линии разметки области парковки против часовой стрелки на экране дисплея 50. Изображение 58B кнопки смещения по часовой стрелке представляет собой изображение, к которому водитель может применить сенсорное воздействие, чтобы сместить изображение 52 линии разметки области парковки по часовой стрелке на экране дисплея 50.
[0085] <Краткое изложение операций устройства помощи при парковке транспортного средства>
Далее будет приведено краткое описание операций устройства 10 помощи при парковке транспортного средства. Устройство 10 помощи при парковке транспортного средства может выполнять управление помощью при парковке. Управление помощью при парковке представляет собой управление парковкой транспортного средства 100 в автономном режиме в области парковки 61 без каких-либо действий, прикладываемых водителем к педали 14 акселератора, педали 15 тормоза и рулевому колесу 16.
[0086] Существуют парковочные места, на которых области парковки разделены линиями, например, белыми линиями. В дальнейшем каждая из линий, разделяющих области парковки, будет называться «линией области парковки». На парковочном месте, на котором области парковки разделены линиями области парковки, устройство помощи при парковке транспортного средства может использовать линии области парковки, полученные камерой, для парковки транспортного средства в автономном режиме на области парковки.
[0087] С другой стороны, существуют парковочные места, такие как парковочное место частного дома, где области парковки не разделены линиями области парковки. На парковочном месте, где области парковки не разделены линиями области парковки, отсутствуют те линии области парковки, которые устройство помощи при парковке транспортного средства использует для парковки транспортного средства 100 в автономном режиме в области парковки. Управление помощью при парковке, которое выполняет устройство 10 помощи при парковке транспортного средства, включает в себя (i) управление для парковки транспортного средства в автономном режиме на парковочном месте и регистрацию информации о парковочном месте, на котором было припарковано транспортное средство, и (ii) управление для парковки транспортного средства в автономном режиме на парковочном месте, зарегистрированном посредством информации о парковочном месте.
[0088] Если скорость SPD движения транспортного средства становится равной или меньшей предварительно заданной скорости SPDth движения транспортного средства, то устройство 10 помощи при парковке транспортного средства начинает выполнять процесс поиска изображения CMR с камеры с целью найти части изображения, имеющие те же характеристики яркости, что и характеристики яркости зарегистрированных характерных элементов Fent_reg на въезде. Устройство 10 помощи при парковке транспортного средства выполняет процесс поиска, используя информацию IMG3 о левом изображении и информацию IMG4 о правом изображении. Как будет подробно описано ниже, зарегистрированные характерные элементы Fent_reg на въезде представляют собой характерные элементы Fent на въезде, имеющие характеристики яркости, зарегистрированные или сохраненные в памяти устройства 10 помощи при парковке транспортного средства посредством зарегистрированной информации CTent_reg о характеристиках яркости на въезде, зарегистрированной при управлении помощи при парковке. Характерные элементы Fent на въезде представляют собой характерные элементы F в изображении CMR с камеры на въезде 62ent на парковочное место 62, полученном при управлении помощью при парковке. Зарегистрированная информация CTent_reg о характеристиках яркости на въезде представляет собой информацию CT о характеристиках яркости в зарегистрированных характерных элементах Fent_reg на въезде. Изображение CMR с камеры представляет собой изображение, снятое и полученное камерами 45.
[0089] Когда устройство 10 помощи при парковке транспортного средства находит части изображения в изображении CMR с камеры, устройство 10 помощи при парковке транспортного средства сравнивает или сопоставляет соотношения в местоположении между найденными частями изображения с соотношениями в местоположении между зарегистрированными характерными элементами Fent_reg на въезде, при наличии у последних характеристик яркости, соответствующих характеристикам яркости найденных частей изображения.
[0090] Если соотношения в местоположении между найденными частями изображения совпадают с соотношениями в местоположении между зарегистрированными характерными элементами Fent_reg на въезде, при наличии у них характеристик яркости, соответствующих характеристикам яркости найденных частей изображения, то устройство 10 помощи при парковке транспортного средства определяет, что около транспортного средства 100 имеется зарегистрированное парковочное место 62. Зарегистрированное парковочное место 62 представляет собой парковочное место, зарегистрированное или сохраненное в памяти устройства 10 помощи при парковке транспортного средства посредством информации Ipark о парковочном месте, зарегистрированной при управлении помощью при парковке.
[0091] В частности, если соотношение в местоположении между найденными частями изображения, определенные на основании информации IMG3 о левом изображении, совпадает с соотношением в местоположении между зарегистрированными характерными элементами Fent_reg на въезде, при наличии у них характеристик яркости, соответствующих характеристикам яркости найденных частей изображения, то устройство 10 помощи при парковке транспортного средства определяет, что с левой стороны транспортного средства 100 имеется зарегистрированное парковочное место 62.
[0092] В свою очередь, если соотношение в местоположении между найденными частями изображения, определенное на основании информации IMG4 о правом изображении, совпадает с соотношением в местоположении между зарегистрированными характерными элементами Fent_reg на въезде, при наличии у них характеристик яркости, соответствующих характеристикам яркости найденных частей изображения, то устройство 10 помощи при парковке транспортного средства определяет, что с правой стороны транспортного средства 100 имеется зарегистрированное парковочное место 62.
[0093] Если устройство 10 помощи при парковке транспортного средства не находит части изображения в изображении CMR с камеры, то устройство 10 помощи при парковке транспортного средства определяет, что около транспортного средства 100 нет зарегистрированного парковочного места 62. Также, если соотношения в местоположении между найденными частями изображения не совпадают с соотношениями в местоположении между зарегистрированными характерными элементами Fent_reg на въезде, при наличии у них характеристик яркости, соответствующих характеристикам яркости найденных частей изображения, устройство 10 помощи при парковке транспортного средства определяет, что около транспортного средства 100 нет зарегистрированного парковочного места 62.
[0094] <Регистрация парковочного места>
Если (i) устройство 10 помощи при парковке транспортного средства определяет, что транспортное средство 100 останавливается на въезде 62ent в парковочное место 62, то (ii) к изображению 51M переключателя помощи при парковке применяется сенсорное воздействие, а затем (iii) сенсорное воздействие применяется к изображению 54 кнопки начала регистрации, и устройство 10 помощи при парковке транспортного средства начинает выполнять процесс регистрации информации Ipark о парковочном месте для получения предварительной информации Ient_pre о въезде и предварительной информации Imid_pre о середине пути, как описано ниже. Кроме того, устройство 10 помощи при парковке транспортного средства регистрирует или сохраняет в памяти (i) зарегистрированную информацию Ient_reg о въезде, (ii) зарегистрированную внутреннюю информацию Iin_reg и (iii) информацию Iarea_reg о зарегистрированной области в качестве информации Ipark о парковочном месте, как описано ниже.
[0095] В частности, если (i) устройство 10 помощи при парковке транспортного средства определяет, что транспортное средство 100 останавливается на въезде 62ent в парковочное место 62, (ii) устройство 10 помощи при парковке транспортного средства определяет, что парковочное место 62, находящееся около транспортного средства 100 не является зарегистрированным парковочным местом, и (iii) водитель применяет сенсорное воздействие к изображению 51M переключателя помощи при парковке, показанному на экране дисплея 50, как изображено на ФИГ. 9A, то устройство 10 помощи при парковке транспортного средства прекращает демонстрировать изображение 51M переключателя помощи при парковке на экране дисплея 50 и демонстрирует изображение 51C с камеры, изображение 51P вида сверху и изображение 52M главного переключателя регистрации на экране дисплея 50, как изображено на ФИГ. 9В.
[0096] Если водитель применяет сенсорное воздействие к изображению 52M главного переключателя регистрации, то устройство 10 помощи при парковке транспортного средства прекращает демонстрировать изображение 51C с камеры, изображение 51P вида сверху и изображение 52M главного переключателя регистрации на экране дисплея 50 и демонстрирует изображение 52S выбора области парковочной площадки на экране дисплея 50, как изображено на ФИГ. 9С.
[0097] Если водитель применяет сенсорное воздействие к изображению 52S выбора области парковки, показанному на экране дисплея 50 с уровнем яркости без его понижения, устройство 10 помощи при парковке транспортного средства прекращает демонстрировать изображение 52S выбора области парковки на экране дисплея 50 и демонстрирует изображение 51P вида сверху, изображение 52 линии разметки области парковки, изображение 53 кнопки настройки, изображение 57 кнопки смещения и изображение 58 кнопки регулировки угла на экране дисплея 50, как показано на ФИГ. 9D. Кроме того, если незарегистрированное парковочное место 62 имеется с левой стороны от транспортного средства 100, устройство 10 помощи при парковке транспортного средства демонстрирует изображение 51P вида сверху на экране дисплея 50 таким образом, что изображение парковочного места появляется на левой стороне изображения транспортного средства. И напротив, если незарегистрированное парковочное место 62 имеется с правой стороны от транспортного средства 100, устройство 10 помощи при парковке транспортного средства демонстрирует изображение 51P вида сверху на экране дисплея 50 таким образом, что изображение парковочного места появляется на правой стороне изображения транспортного средства.
[0098] Кроме того, устройство 10 помощи при парковке транспортного средства устанавливает область парковки 61 в качестве области, где транспортное средство 100 может быть припарковано, на основании информации IMG об изображении и информации SON ультразвукового локационного устройства. Затем устройство 10 помощи при парковке транспортного средства отображает установленную область парковки 61 на экране дисплея 50 посредством изображения 52 линий разметки области парковки. Устройство 10 помощи при парковке транспортного средства использует, например, информацию SON ультразвукового локационного устройства, чтобы получить размеры въезда 62ent на парковочное место 62.
[0099] Водитель может переместить изображение 52 линии разметки области парковки на экране дисплея 50, применяя сенсорное воздействие к изображению 57 кнопки смещения перед тем, как применить сенсорное воздействие к изображению 53 кнопки настройки. Водитель может изменить местоположение области парковки 61 на местоположение, в котором он желает припарковать транспортное средство 100, смещая изображение 52 линий разметки области парковки на экране дисплея 50. Кроме того, водитель может повернуть изображение 52 линии разметки области парковки на экране дисплее 50, применяя сенсорное воздействие к изображению 58 кнопки регулировки угла перед тем, как он применит сенсорное воздействие к изображению 53 кнопки настройки. Водитель может сменить местоположение области парковки 61 на местоположение, в котором он желает припарковать транспортное средство 100, поворачивая изображение 52 линии разметки области парковки на экране дисплея 50.
[0100] Если водитель применяет сенсорное воздействие к изображению 53 кнопки настройки, то устройство 10 помощи при парковке транспортного средства прекращает показывать изображение 53 кнопки настройки, изображение 57 кнопки смещения и изображение 58 кнопки регулировки угла на экране дисплея 50 и демонстрирует изображение 51С с камеры, изображение 51Р вида сверху и изображение 54 кнопки начала регистрации на экране дисплея 50, как изображено на ФИГ. 10A.
[0101] Кроме того, если водитель применяет сенсорное воздействие к изображению 53 кнопки настройки, то устройство 10 помощи при парковке транспортного средства получает данные о местоположении области парковки 61, соответствующем местоположению изображения 52 линии разметки области парковки, показанному на экране дисплея 50. Затем устройство 10 помощи при парковке транспортного средства устанавливает область парковки 61, находящуюся в указанном местоположении, в качестве зарегистрированной целевой области 61set парковки.
[0102] Кроме того, если водитель применяет сенсорное воздействие к изображению 53 кнопки настройки, устройство 10 помощи при парковке транспортного средства устанавливает целевой маршрут Rtgt для перемещения транспортного средства 100 с целью парковки транспортного средства 100 в зарегистрированной целевой области 61set парковки. Например, если транспортное средство 100 останавливается с правой стороны незарегистрированного парковочного места 62, как показано на ФИГ. 11, то устройство 10 помощи при парковке транспортного средства устанавливает целевой маршрут Rtgt, как изображено на ФИГ. 12.
[0103] Кроме того, если (i) транспортное средство 100 останавливается с правой стороны от парковочного места 62, и (ii) водитель применяет сенсорное воздействие к изображению 53 кнопки настройки, то устройство 10 помощи при парковке транспортного средства получает предварительно заданное количество (один или более) новых левых характерных элементов F3new в каждой из четырех средних выделенных областей 73D5, двух передних выделенных областей 73D1 и двух задних выделенных областей 73D2 левой области 73. В это время устройство 10 помощи при парковке транспортного средства получает данные о новых левых характерных элементах F3new как о характерных элементах Fent на въезде. В свою очередь, если (i) транспортное средство 100 останавливается с левой стороны от парковочного места 62, и (ii) водитель применяет сенсорное воздействие к изображению 53 кнопки настройки, то устройство 10 помощи при парковке транспортного средства получает предварительно заданное количество (один или более) новых правых характерных элементов F4new в каждой из четырех средних выделенных областей 74D5, двух передних выделенных областей 74D1 и двух задних выделенных областей 74D2 правой области 74. В это время устройство 10 помощи при парковке транспортного средства получает данные о новых правых характерных элементах F4new как о характерных элементах Fent на въезде.
[0104] В этом варианте осуществления изобретения, если (i) транспортное средство 100 останавливается с правой стороны от парковочного места 62 и (ii) водитель применяет сенсорное воздействие к изображению 53 кнопки настройки, устройство 10 помощи при парковке транспортного средства получает характерные элементы Fent на въезде таким образом, что количество характерных элементов Fent на въезде, полученное в каждой из средних выделенных областей 73D5 больше, чем количество характерных элементов Fent на въезде, полученное в каждой из передних выделенных областей 73D1 и задних выделенных областей 73D2. По существу, устройство 10 помощи при парковке транспортного средства получает характерные элементы Fent на въезде таким образом, что количество характерных элементов Fent на въезде, полученное в каждой из областей 73D5 вблизи центра въезда 62ent на парковочное место 62 больше, чем количество характерных элементов Fent на въезде, полученное в каждой из областей 73D1 и 73D2 на удалении от центра въезда 62ent на парковочное место 62.
[0105] С другой стороны, если (i) транспортное средство 100 останавливается с левой стороны от парковочного места 62 и (ii) водитель применяет сенсорное воздействие к изображению 53 кнопки настройки, устройство 10 помощи при парковке транспортного средства получает данные о характерных элементах Fent на въезде таким образом, что количество характерных элементов Fent на въезде, полученное в каждой из средних выделенных областей 74D5 больше, чем количество характерных элементов Fent на въезде, полученное в каждой из передних выделенных областей 74D1 и задних выделенных областей 74D2. По существу, устройство 10 помощи при парковке транспортного средства получает данные о характерных элементах Fent на въезде таким образом, что количество характерных элементов Fent на въезде, полученное в каждой из областей 74D5 вблизи центра въезда 62ent на парковочное место 62 больше, чем количество характерных элементов Fent на въезде, полученное в каждой из областей 74D1 и 74D2 на удалении от центра въезда 62ent на парковочное место 62.
[0106] Например, если транспортное средство 100 останавливается с правой стороны от парковочного места 62, как показано на ФИГ. 11, то устройство 10 помощи при парковке транспортного средства получает (i) два новых левых характерных элемента F3new в качестве характерных элементов Fent на въезде в каждой из четырех средних выделенных областей 73D5 левой области 73, (ii) один новый левый характерный элемент F3new в качестве характерного элемента Fent на въезде в каждой из двух передних выделенных областей 73D1 левой области 73 и (iii) один новый левый характерный элемент F3new в качестве характерного элемента Fent на въезде в каждой из двух задних выделенных областей 73D2 левой области 73 (см. ФИГ. 13 и ФИГ. 14). И напротив, если транспортное средство 100 останавливается с левой стороны от парковочного места 62, устройство 10 помощи при парковке транспортного средства получает (i) два новых правых характерных элемента F4new в качестве характерных элементов Fent на въезде в каждой из четырех средних выделенных областей 74D5 правой области 74, (ii) один новый левый характерный элемент F4new в качестве характерного элемента Fent на въезде в каждой из двух передних выделенных областей 74D1 правой области 74 и (iii) один новый левый характерный элемент F4new в качестве характерного элемента Fent на въезде в каждой из двух задних выделенных областей 74D2 правой области 74.
[0107] Следует отметить, что устройство 10 помощи при парковке транспортного средства может быть выполнено с возможностью получения характерных элементов Fent на въезде таким образом, что количество характерных элементов Fent на въезде, полученное в каждой из двух передних выделенных областей 73D1 и двух средних выделенных областей 73D5, смежных с выделенными передними областями 73D1, будет больше, чем количество характерных элементов Fent на въезде, полученное в каждой из двух задних выделенных областей 73D2 и двух средних выделенных областей 73D5, смежных с задними выделенными областями 73D2, когда водитель обычно предпочитает останавливать транспортное средство 100 с правой стороны от въезда 62ent на парковочное место 62 и немного впереди от положения, находящегося непосредственно сбоку от въезда 62ent на парковочное место 62. Аналогично, устройство 10 помощи при парковке транспортного средства может быть выполнено с возможностью получения характерных элементов Fent на въезде таким образом, что количество характерных элементов Fent на въезде, полученное в каждой из двух передних выделенных областей 74D1 и двух средних выделенных областей 74D5, смежных с выделенными передними областями 74D1, будет больше, чем количество характерных элементов Fent на въезде, полученное в каждой из двух задних выделенных областей 74D2 и двух средних выделенных областей 74D5, смежных с задними выделенными областями 74D2, если водитель обычно предпочитает останавливать транспортное средство 100 с левой стороны от въезда 62ent на парковочное место 62 и немного впереди от положения, находящегося непосредственно сбоку от въезда 62ent на парковочное место 62.
[0108] Если устройство 10 помощи при парковке транспортного средства не может получить заранее заданное количество новых левых характерных элементов F3new из, по меньшей мере, одной из средних выделенных областей 73D5, передних выделенных областей 73D1 и задних выделенных областей 73D2 левой области 73, то устройство 10 помощи при парковке транспортного средства получает характерные элементы Fent на въезде из оставшихся средних выделенных областей 73D5, передних выделенных областей 73D1 и задних выделенных областей 73D2 таким образом, чтобы скомпенсировать недостаточное количество полученных характерных элементов Fent на въезде. Аналогично, если устройство 10 помощи при парковке транспортного средства не может получить заранее заданное количество новых правых характерных элементов F4new из, по меньшей мере, одной из средних выделенных областей 74D5, передних выделенных областей 74D1 и задних выделенных областей 74D2 правой области 74, то устройство 10 помощи при парковке транспортного средства получает характерные элементы Fent на въезде из оставшихся средних выделенных областей 74D5, передних выделенных областей 74D1 и задних выделенных областей 74D2 таким образом, чтобы скомпенсировать недостаточное количество полученных характерных элементов Fent на въезде.
[0109] После того, как устройство 10 помощи при парковке транспортного средства получает характерные элементы Fent на въезде, устройство 10 помощи при парковке транспортного средства определяет координаты XY каждого из полученных характерных элементов Fent на въезде в предварительной системе Cpre координат и отправляет в память полученные координаты XY в качестве предварительных координат XYent_pre въезда. Кроме того, устройство 10 помощи при парковке транспортного средства получает информацию CT о характеристиках яркости в каждом из полученных характерных элементов Fent на въезде и отправляет в память полученную информацию о характеристиках CT яркости в качестве предварительной информации CTent_pre о характеристиках яркости на въезде. Предварительная система Cpre координат представляет собой систему координат, в которой предварительно заданный элемент Ppre в зарегистрированной целевой области 61set парковочной площадки является исходным. Таким образом, предварительные координаты XYent_pre въезда указывают положение характерного элемента Fent на въезде относительно предварительно заданного положения Ppre. Предварительная информация Ient_pre о въезде включает в себя предварительные координаты XYent_pre въезда и предварительную информацию CTent_pre о характеристиках яркости на въезде.
[0110] Если водитель применяет сенсорное воздействие к изображению 54 кнопки начала регистрации, то устройство 10 помощи при парковке транспортного средства прекращает демонстрировать изображение 54 кнопки начала регистрации на экране дисплея 50 и продолжает демонстрировать изображение 51C с камеры и изображение 51P вида сверху на экране дисплея 50, как изображено на ФИГ. 10B. В этом случае, если незарегистрированное парковочное место 62 находится с левой стороны от транспортного средства 100, то устройство 10 помощи при парковке транспортного средства получает изображение, демонстрирующее незарегистрированное парковочное место 62 из левой камеры 43, и демонстрирует полученное изображение на экране дисплея 50 в качестве изображения 51C с камеры. Кроме того, устройство 10 помощи при парковке транспортного средства демонстрирует изображение 51P вида сверху на экране дисплея 50 таким образом, что изображение парковочного места появляется с левой стороны от изображения транспортного средства. В свою очередь, если незарегистрированное парковочное место 62 находится с правой стороны от транспортного средства 100, то устройство 10 помощи при парковке транспортного средства получает изображение, демонстрирующее незарегистрированное парковочное место 62 из правой камеры 44, и демонстрирует полученное изображение на экране дисплея 50 в качестве изображения 51C с камеры. Кроме того, устройство 10 помощи при парковке транспортного средства демонстрирует изображение 51P вида сверху на экране дисплея 50 таким образом, что изображение парковочного места появляется с правой стороны от изображения транспортного средства.
[0111] Кроме того, если водитель применяет сенсорное воздействие к изображению 54 кнопки начала регистрации, то устройство 10 помощи при парковке транспортного средства начинает выполнять процесс первого парковочного движения для перемещения транспортного средства 100 в зарегистрированную целевую область парковки 61set по целевому маршруту Rtgt движения. Процесс первого парковочного движения представляет собой процесс для управления операциями устройства 11 создания движущей силы транспортного средства, тормозного устройства 12 и устройства 13 рулевого управления с целью перемещения транспортного средства 100 по целевому маршруту Rtgt движения на основании (i) информации IMG об изображении, (ii) информации OBJ об объекте, (iii) угла θst поворота рулевого колеса, (iv) крутящего момента TQst рулевого управления, (v) скорости SPD движения транспортного средства, (vi) скорости YR рыскания транспортного средства, (vii) продольного ускорения Gx транспортного средства и (viii) поперечного ускорения Gy транспортного средства.
[0112] Например, если транспортное средство 100 останавливается с правой стороны от незарегистрированного парковочного места 62, как продемонстрировано на ФИГ. 11, то устройство 10 помощи при парковке транспортного средства начинает выполнять процесс первого парковочного движения с целью перемещения транспортного средства 100 вперед вправо и останавливает транспортное средство 100 так, как продемонстрировано на ФИГ. 15. Затем устройство 10 помощи при парковке транспортного средства перемещает транспортное средство 100 назад влево, как показано на ФИГ. 16.
[0113] Устройство 10 помощи при парковке транспортного средства получает характерные элементы F по меньшей мере один раз до или когда устройство 10 помощи при парковке транспортного средства завершает парковку транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке. Затем устройство 10 помощи при парковке транспортного средства получает координаты XY полученных характерных элементов F в предварительной системе Cpre координат и информацию CT о характеристиках яркости полученных характерных элементов F. В частности, после того, как устройство 10 помощи при парковке транспортного средства начинает движение транспортного средства 100 с целью парковки транспортного средства 100 на парковочном месте 62, устройство 10 помощи при парковке транспортного средства по меньшей мере один раз получает характерные элементы F в тот момент времени, когда устройство 10 помощи при парковке транспортного средства прогнозирует, что транспортное средство 100 продолжает движение по прямой, не поворачивая, пока устройство 10 помощи при парковке транспортного средства не завершит парковку транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке. Затем устройство 10 помощи при парковке транспортного средства получает координаты XY полученных характерных элементов F из предварительной системы Cpre координат и информацию CT о характеристиках яркости полученных характерных элементов F.
[0114] В этом варианте осуществления изобретения устройство 10 помощи при парковке транспортного средства получает задние характерные элементы F2 в качестве новых задних характерных элементов F2new в тот момент времени, когда устройство 10 помощи при парковке транспортного средства прогнозирует, что транспортное средство 100 продолжает двигаться назад по прямой, не поворачивая, пока устройство 10 помощи при парковке транспортного средства не завершит парковку транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке (см. ФИГ. 17). Следует отметить, что устройство 10 помощи при парковке транспортного средства может получать задние характерные элементы F2 в тот момент времени, когда транспортное средство 100 переместилось на предварительно заданное расстояние Dtravel_th после того, как устройство 10 помощи при парковке транспортного средства прогнозировало, что транспортное средство 100 продолжает двигаться назад прямо, не поворачивая, пока устройство 10 помощи при парковке транспортного средства не завершит парковку транспортного средства 100 на парковочном месте 62 при управлении помощи при парковке. В альтернативном варианте, устройство 10 помощи при парковке транспортного средства может получать (i) задние характерные элементы F2 в тот момент времени, когда устройство 10 помощи при парковке транспортного средства прогнозирует, что транспортное средство 100 продолжает двигаться назад прямо, не поворачивая, до того момента времени, пока устройство 10 помощи при парковке транспортного средства не завершит парковку транспортного средства 100 на парковочном месте 62 при управлении помощи при парковке и (ii) задние характерные элементы F2, в тот момент времени, когда транспортное средство 100 переместилось на предварительно заданное расстояние Dtravel_th после того, как устройство 10 помощи при парковке транспортного средства прогнозировало, что транспортное средство 100 продолжает двигаться назад прямо, не поворачивая, пока устройство 10 для помощи при парковке транспортного средства не завершит парковку транспортного средства 100 на парковочном месте 62 при управлении помощи при парковке. В ином случае, устройство 10 помощи при парковке транспортного средства может получать (i) задние характерные элементы F2 в тот момент времени, когда устройство 10 помощи при парковке транспортного средства прогнозирует, что транспортное средство 100 продолжает двигаться назад прямо, не поворачивая, пока устройство 10 помощи при парковке транспортного средства не завершит парковку транспортного средства 100 на парковочном месте 62 при управлении помощи при парковке и (ii) задние характерные элементы F2 каждый раз, когда транспортное средство 100 перемещается на предварительно заданное расстояние Dtravel_th после того, как устройство 10 помощи при парковке транспортного средства прогнозировало, что транспортное средство 100 продолжает двигаться назад прямо, не поворачивая, пока устройство 10 для помощи при парковке транспортного средства не завершит парковку транспортного средства 100 на парковочном месте 62 при управлении помощи при парковке. В альтернативном варианте, устройство 10 помощи при парковке транспортного средства может получать задние характерные элементы F2 каждый раз, когда транспортное средство 100 перемещается на предварительно заданное расстояние Dtravel_th после того, как устройство 10 помощи при парковке транспортного средства прогнозировало, что транспортное средство 100 продолжает двигаться назад прямо, не поворачивая, пока устройство 10 помощи при парковке транспортного средства не завершит парковку транспортного средства 100 на парковочном месте 62 при управлении помощи при парковке. Кроме того, устройство 10 помощи при парковке транспортного средства может получать передние характерные элементы F1, левые характерные элементы F3 и/или правые характерные элементы F4 в дополнение к задним характерным элементам F2.
[0115] В этом варианте осуществления изобретения предварительно заданное расстояние Dtravel_th устанавливается как расстояние, которое может исключить то, чтобы область парковочного места 62, соответствующая задней области 72 при получении задних характерных элементов F2 в текущий момент времени, перекрывала область парковочного места 62, соответствующую задней области 72 при получении задних характерных элементов F2 в прошлый момент времени.
[0116] Затем устройство 10 помощи при парковке транспортного средства получает один или более новый задний характерный элемент F2new из каждой задней выделенной области 72D и устанавливает полученные новые задние характерные элементы F2new в качестве характерных элементов Fmid середины пути. Затем устройство 10 помощи при парковке транспортного средства получает координаты XY полученных характерных элементов Fmid середины пути в предварительной системе Cpre координат и эти полученные координаты XY сохраняет в памяти в качестве предварительных координат XYmid_pre середины пути. Дополнительно устройство 10 помощи при парковке транспортного средства получает информацию CT о характеристиках яркости полученных характерных элементов Fmid середины пути, и эта полученная информация CT о характеристиках яркости сохраняется в памяти в качестве предварительной информации CTmid_pre о характеристиках яркости на середине пути. Предварительные координаты XYmid_pre середины пути указывают положения характерных элементов Fmid середины пути относительно предварительно заданного положения Ppre. Предварительная информация Imid_pre о середине пути включает в себя предварительные координаты XYmid_pre середины пути и предварительную информацию CTmid_pre о характеристиках яркости на середине пути.
[0117] Кроме того, в то время как устройство 10 помощи при парковке транспортного средства выполняет процесс первого парковочного движения, перемещая транспортное средство 100 по целевому маршруту Rtgt движения, устройство 10 помощи при парковке транспортного средства выполняет процесс определения безопасности с целью определения, может ли устройство 10 помощи при парковке транспортного средства безопасно переместить транспортное средство 100 в зарегистрированную целевую область парковки 61set, исключив контакт транспортного средства 100 со стоящим объектом на парковочном месте 62. Если устройство 10 помощи при парковке транспортного средства определяет, что устройство 10 помощи при парковке транспортного средства не может безопасно переместить транспортное средство 100 в зарегистрированную целевую область парковки 61set, указанное устройство 10 помощи при парковке транспортного средства корректирует целевой маршрут Rtgt движения таким образом, чтобы устройство 10 помощи при парковке транспортного средства могло безопасно переместить транспортное средство 100 в зарегистрированную целевую область парковки 61set, исключив контакт транспортного средства 100 со стоящим объектом на парковочном месте 62. Устройство 10 помощи при парковке транспортного средства выполняет данный процесс определения безопасности на основании информации IMG об изображении и информации OBJ об объекте, которые устройство 10 помощи при парковке транспортного средства получает во время выполнения процесса первого парковочного движения.
[0118] Кроме того, в то время как устройство 10 помощи при парковке транспортного средства выполняет процесс первого парковочного движения, перемещая транспортное средство 100 по целевому маршруту Rtgt движения, устройство 10 помощи при парковке транспортного средства выполняет процесс определения маршрута, чтобы определить, может ли устройство 10 помощи при парковке транспортного средства произвести парковку транспортного средства 100 в зарегистрированной целевой области 61set парковки. Если устройство 10 помощи при парковке транспортного средства определяет, что устройство 10 помощи при парковке транспортного средства не может произвести парковку транспортного средства 100 в зарегистрированной целевой области 61set парковки, устройство 10 помощи при парковке транспортного средства корректирует целевой маршрут Rtgt движения таким образом, чтобы устройство 10 помощи при парковке транспортного средства смогло произвести парковку транспортного средства 100 в зарегистрированной целевой области 61set парковки. Устройство 10 помощи при парковке транспортного средства выполняет процесс определения маршрута движения на основании информации IMG об изображении (в частности, характерных элементов F), которую устройство 10 помощи при парковке транспортного средства получает во время выполнения процесса первого парковочного движения.
[0119] Когда транспортное средство 100 целиком переместилось в зарегистрированную целевую область 61set парковки (см. ФИГ. 18), устройство 10 помощи при парковке транспортного средства останавливает транспортное средство 100 и завершает выполнение процесса первого парковочного движения. Таким образом, парковка транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке завершается. В это время устройство 10 помощи при парковке транспортного средства получает передние характерные элементы F1, левые характерные элементы F3 и правые характерные элементы F4 в качестве новых передних характерных элементов F1new, новых левых характерных элементов F3new и новых правых характерных элементов F4new, соответственно. В это время устройство 10 помощи при парковке транспортного средства может получать задние характерные элементы F2 в качестве новых задних характерных элементов F2new.
[0120] Затем устройство 10 помощи при парковке транспортного средства получает один или более из полученных новых передних характерных элементов F1new из каждой передней выделенной области 71D в качестве конечных характерных элементов Ffin. Кроме того, устройство 10 помощи при парковке транспортного средства получает один или более из полученных новых левых характерных элементов F3new из каждой левой выделенной области 73D в качестве о конечных характерных элементов Ffin. Также, устройство 10 помощи при парковке транспортного средства получает один или более из полученных новых правых характерных элементов F4new из каждой правой выделенной области 74D в качестве конечных характерных элементов Ffin. Если устройство 10 помощи при парковке транспортного средства получило новые задние характерные элементы F2new, устройство 10 помощи при парковке транспортного средства получает один или более из полученных новых задних характерных элементов F2new из каждой из задних выделенных областей 72D в качестве конечных характерных элементов Ffin.
[0121] <Регистрация информации о парковочном месте>
Если устройство 10 помощи при парковке транспортного средства завершает парковку транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке, то устройство 10 помощи при парковке транспортного средства прекращает демонстрировать изображение 51C с камеры на экране дисплея 50 и демонстрирует изображение 51P вида сверху, изображение 55 кнопки регистрации, изображение 57 кнопки смещения и изображение 58 кнопки регулировки угла на экране дисплея 50, как изображено на ФИГ. 10С.
[0122] Водитель может сместить изображение 52 линии разметки парковки на экране дисплея 50, применяя сенсорное воздействие к изображению 57 кнопки смещения перед тем, как применить сенсорное воздействие к изображению 55 кнопки настройки. Водитель может изменить местоположение области парковки 61 на местоположение, в котором он желает припарковать транспортное средство 100, смещая изображение 52 линий разметки парковки на экране дисплея 50. Кроме того, водитель может повернуть изображение 52 линии разметки парковки на экране дисплее 50, применяя сенсорное воздействие к изображению 58 кнопки регулировки угла перед тем, как он применит сенсорное воздействие к изображению 55 кнопки настройки. Водитель может изменить местоположение области парковки 61 на местоположение, в котором он желает припарковать транспортное средство 100, поворачивая изображение 52 линии разметки парковки на экране дисплея 50.
[0123] Когда водитель применяет сенсорное воздействие к изображению 55 кнопки регистрации, устройство 10 помощи при парковке транспортного средства получает координаты XY полученных конечных характерных элементов Ffin в регистрационной системе Creg координат, и регистрирует или сохраняет в памяти полученные координаты XY в качестве зарегистрированных внутренних координат XYin_reg. Дополнительно устройство 10 помощи при парковке транспортного средства получает информацию CT о характеристиках яркости полученных конечных характерных элементов Ffin, и регистрирует или сохраняет в памяти полученную информацию CT о характеристиках яркости в качестве зарегистрированной внутренней информации CTin_reg о характеристиках яркости. Регистрационная система Creg координат представляет собой систему координат, в которой предварительно заданная точка Preg является началом координат (см. ФИГ. 18). Транспортное средство 100 содержит ось, соединяющую левое заднее колесо и правое заднее колесо друг с другом. Предварительно заданная точка Preg представляет собой центральную точку оси в поперечном направлении Dy транспортного средства в тот момент времени, когда парковка транспортного средства 100 в зарегистрированной целевой области парковки 61set при управлении помощью при парковке, завершена. Следовательно, зарегистрированные внутренние координаты XYin_reg указывают положения конечных характерных элементов Ffin относительно предварительно заданного положения Preg.
[0124] Дополнительно устройство 10 помощи при парковке транспортного средства преобразует предварительные координаты XYmid_pre середины пути в координаты XY в регистрационной системе Creg координат и регистрирует или сохраняет в памяти преобразованные координаты XY в качестве зарегистрированных внутренних координат XYin_reg. Кроме того, устройство 10 помощи при парковке транспортного средства регистрирует или сохраняет в памяти предварительную информацию CTmid_pre о характеристиках яркости середины пути в качестве зарегистрированной внутренней информации CTin_reg о характеристиках яркости. Следовательно, зарегистрированные внутренние координаты XYin_reg указывают положения характерных элементов Fmid середины пути относительно предварительно заданного положения Preg.
[0125] Зарегистрированная внутренняя информация Iin_reg содержит зарегистрированные внутренние координаты XYin_reg и зарегистрированную внутреннюю информацию CTin_reg о характеристиках яркости.
[0126] Кроме того, устройство 10 помощи при парковке транспортного средства регистрирует или сохраняет в памяти координаты XY зарегистрированной целевой области парковки 61set в регистрационной системе Creg координат в качестве координат XYarea_reg зарегистрированной области. Координаты XYarea_reg зарегистрированной области указывают местоположение области парковки 61 относительно предварительно заданного местоположения Preg. Информация Iarea_reg о зарегистрированной области содержит координаты XYarea_reg зарегистрированной области.
[0127] Дополнительно устройство 10 помощи при парковке транспортного средства преобразует предварительные координаты XYent_pre въезда в координаты XY в регистрационной системе Creg координат и регистрирует или сохраняет в памяти преобразованные координаты XY в качестве зарегистрированных координат XYent_reg въезда. Кроме того, устройство 10 помощи при парковке транспортного средства регистрирует или сохраняет в памяти предварительную информацию CTent_pre о характеристиках яркости на въезде в качестве зарегистрированной информации CTent_reg о характеристиках яркости на въезде. Таким образом, зарегистрированные координаты XYent_reg въезда указывают положение характерных элементов Fent на въезде относительно предварительно заданного положения Preg. Зарегистрированная информация Ient_reg о въезде содержит зарегистрированные координаты XYent_reg въезда и зарегистрированную информацию CTent_reg о характеристиках яркости на въезде.
[0128] Как описано выше, информация Ipark о парковочном месте содержит зарегистрированную информацию Ient_reg о въезде, зарегистрированную внутреннюю информацию Iin_reg и информацию Iarea_reg о зарегистрированной области.
[0129] <Парковка транспортного средства на зарегистрированном парковочном месте>
Если (i) устройство 10 помощи при парковке транспортного средства определяет, что транспортное средство 100 останавливается на въезде 62ent в парковочное место 62, (ii) устройство 10 помощи при парковке транспортного средства определяет, что рассматриваемое парковочное место 62 является зарегистрированным парковочным местом, и (iii) водитель применяет сенсорное воздействие к изображению 51M переключателя помощи при парковке, отображаемому на экране на дисплея 50, как изображено на ФИГ. 10A, то устройство 10 помощи при парковке транспортного средства прекращает показывать изображение 51M переключателя помощи при парковке на экране дисплея 50 и показывает изображение 51C с камеры, изображение 51P вида сверху, изображение 52M главного переключателя регистрации и изображение 56 кнопки начала парковки на экране дисплея 50, как изображено на ФИГ. 19В. В связи с этим, если зарегистрированное парковочное место 62 находится с левой стороны от транспортного средства 100, то устройство 10 помощи при парковке транспортного средства получает изображение, демонстрирующее зарегистрированное парковочное место 62, из левой камеры 43, и демонстрирует полученное изображение на экране дисплея 50 в качестве изображения 51C с камеры. Кроме того, устройство 10 помощи при парковке транспортного средства демонстрирует изображение 51P вида сверху на дисплее 50 таким образом, что изображение парковочного места отображается с левой стороны от изображения транспортного средства. С другой стороны, если зарегистрированное парковочное место 62 находится с правой стороны от транспортного средства 100, то устройство 10 помощи при парковке транспортного средства получает изображение, демонстрирующее зарегистрированное парковочное место 62 из правой камеры 44, и демонстрирует полученное изображение на экране дисплея 50 в качестве изображения 51C с камеры. Кроме того, устройство 10 помощи при парковке транспортного средства демонстрирует изображение 51P вида сверху на экране дисплея 50 таким образом, что изображение парковочного места отображается с правой стороны от изображения транспортного средства.
[0130] Кроме того, устройство 10 помощи при парковке транспортного средства устанавливает местоположение области парковки 61 на основании координат XYarea_reg зарегистрированной области, включенных в информацию Ipark о парковочном месте, касающуюся зарегистрированного парковочного места 62, на котором устройство 10 помощи при парковке транспортного средства произведет парковку транспортного средства 100 в текущий момент времени.
[0131] Если водитель применяет сенсорное воздействие к изображению 56 кнопки начала парковки, то устройство 10 помощи при парковке транспортного средства прекращает демонстрировать изображение 52M главного переключателя регистрации и изображение 56 кнопки начала парковки на экране дисплея 50 и продолжает демонстрировать изображение 51C с камеры и изображение 51P вида сверху на экране дисплея 50, как изображено на ФИГ. 19C.
[0132] Кроме того, если водитель применяет сенсорное воздействие к изображению 56 кнопки начала парковки, устройство 10 помощи при парковке транспортного средства считывает область парковки 61, зарегистрированную в информации Ipark о парковочном месте, и устанавливает целевую область парковки 61tgt в качестве полученной области парковки 61.
[0133] Кроме того, если водитель применяет сенсорное воздействие к изображению 56 кнопки начала парковки, то устройство 10 помощи при парковке транспортного средства устанавливает целевой маршрут Rtgt движения, по которому устройство 10 помощи при парковке транспортного средства перемещает транспортное средство 100 для того, чтобы припарковать транспортное средство 100 в целевой области парковки 61tgt.
[0134] Затем устройство 10 помощи при парковке транспортного средства выполняет процесс второго парковочного движения для того, чтобы переместить транспортное средство 100 в целевую область парковки 61tgt по целевому маршруту Rtgt движения. Процесс второго парковочного движения представляет собой процесс управления операциями устройства 11 для создания движущей силы транспортного средства, тормозного устройства 12 и устройства 13 рулевого управления с целью перемещения транспортного средства 100 по целевому маршруту Rtgt движения на основании (i) информации IMG об изображении, (ii) информации OBJ об объекте, (iii) угла θst поворота руля, (iv) крутящего момента TQst рулевого управления, (v) скорости SPD движения транспортного средства, (vi) скорости YR рыскания транспортного средства, (vii) продольного ускорения Gx транспортного средства и (viii) поперечного ускорения Gy транспортного средства.
[0135] В то время как устройство 10 помощи при парковке транспортного средства выполняет процесс второго парковочного движения для перемещения транспортного средства 100 по целевому маршруту Rtgt движения, устройство 10 помощи при парковке транспортного средства выполняет процесс определения безопасности с целью определения, может ли устройство 10 помощи при парковке транспортного средства безопасно переместить транспортное средство 100 в целевую область парковки 61tgt, исключив контакт транспортного средства 100 со стоящим объектом на парковочном месте 62. Если устройство 10 помощи при парковке транспортного средства определяет, что устройство 10 помощи при парковке транспортного средства не может безопасно переместить транспортное средство 100 в целевую область парковки 61tgt, то устройство 10 помощи при парковке транспортного средства корректирует целевой маршрут Rtgt движения таким образом, чтобы устройство 10 помощи при парковке транспортного средства могло безопасно переместить транспортное средство 100 в целевую область парковки 61tgt, исключив контакт транспортного средства 100 со стоящим объектом на парковочном месте 62. Устройство 10 помощи при парковке транспортного средства выполняет данный процесс определения безопасности на основании информации IMG об изображении и информации OBJ об объекте, которые устройство 10 помощи при парковке транспортного средства получает во время выполнения процесса второго парковочного движения.
[0136] В то время как устройство10 помощи при парковке транспортного средства выполняет процесс второго парковочного движения, устройство 10 помощи при парковке транспортного средства выполняет процесс поиска для поиска изображения CMR с камеры для того, чтобы найти на нем части изображения, имеющие такие же характеристики яркости, что и характеристики яркости зарегистрированных характерных элементов Freg. Устройство 10 помощи при парковке транспортного средства выполняет процесс поиска, используя информацию IMG2 о заднем изображении, информацию IMG3 о левом изображении и информацию IMG4 о правом изображении. Зарегистрированный характерный элемент Fent представляет собой характерный элемент F, в котором характеристики яркости зарегистрированы, как зарегистрированная внутренняя информация CTin_reg о характеристиках яркости при управлении помощью при парковке.
[0137] Если устройство 10 помощи при парковке транспортного средства находит части изображения в изображении CMR с камеры, устройство 10 помощи при парковке транспортного средства сравнивает или сопоставляет соотношения в положении между найденными частями изображения с соотношениями в положении между зарегистрированными характерными элементами Fent_reg, имеющими характеристики яркости, соответствующие характеристикам яркости найденных частей изображения.
[0138] Если соотношение в положении между найденными частями изображения совпадает с соотношением в положении между зарегистрированными характерными элементами Fent_reg на въезде, имеющими характеристики яркости, соответствующие характеристикам яркости найденных частей изображения, то устройство 10 помощи при парковке транспортного средства выполняет процесс определения местоположения парковки, чтобы определить, соответствует ли местоположение целевой области парковки 61tgt в парковочном месте 62 местоположению, определяемому координатами XYarea_reg зарегистрированной области, на основании взаимосвязи между координатами XYarea_reg зарегистрированной области и координатами XY зарегистрированных характерных элементов Freg, имеющих такие же характеристики яркости, как и характеристики яркости найденных частей изображения. Если устройство 10 помощи при парковке транспортного средства определяет, что местоположение целевой области парковки 61tgt в парковочном месте 62 не соответствует местоположению, определяемому координатами XYarea_reg зарегистрированной области, то устройство 10 помощи при парковке транспортного средства корректирует местоположение целевой области парковки 61tgt таким образом, чтобы местоположение целевой области парковки 61tgt в парковочном месте 62 соответствовало местоположению, определяемому координатами XYarea_reg зарегистрированной области. Затем устройство 10 помощи при парковке транспортного средства корректирует целевой маршрут Rtgt движения таким образом, чтобы устройство 10 помощи при парковке транспортного средства могло выполнить парковку транспортного средства 100 в целевой области парковки 61tgt, имеющей скорректированное местоположение.
[0139] Когда транспортное средство 100 целиком переместилось в целевую область парковки 61tgt, устройство 10 помощи при парковке транспортного средства останавливает транспортное средство 100 и завершает выполнение процесса второго парковочного движения. На этом парковка транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке завершается.
[0140] Было дано краткое описание операций устройства 10 помощи при парковке транспортного средства. Согласно устройству 10 помощи при парковке транспортного средства, в качестве зарегистрированной информации о въезде регистрируется информация о характерных элементах F на поверхности земли 63 в парковочном месте 62 и/или вокруг него, а не информация о характерных элементах стоящего(-их) объекта(-ов) в парковочном месте 62 и/или вокруг него. Изображение CMR с камеры поверхности земли 63 в парковочном месте 62 и/или вокруг него изменяется в небольшой степени между временем регистрации регистрируемой информации Ient_reg о въезде и временем прибытия транспортного средства 100 на въезд 62ent зарегистрированного парковочного места 62 после регистрации регистрируемой информации Ient_reg о въезде, если ситуация, окружающая транспортное средство 100 и парковочное место 62 изменяется между временем регистрации регистрируемой информации о въезде Ient_reg и временем прибытия транспортного средства 100 на въезд 62ent зарегистрированного парковочного места 62 после регистрации регистрируемой информации о въезде Ient_reg. Следовательно, можно уверенно определить, что характерные элементы Fent на въезде, полученные в текущий момент времени, являются зарегистрированными характерными элементами Fent_reg на въезде, когда транспортное средство 100 прибывает на въезд 62ent зарегистрированного парковочного места 62, если ситуация вокруг транспортного средства 100 и парковочного места 62 изменяется между временем, когда регистрируемая информация о въезде Ient_reg была исходно зарегистрирована и временем прибытия транспортного средства 100 на въезд 62ent зарегистрированного парковочного места 62 в текущий момент времени. В результате, можно с уверенностью определить, что парковочное место 62, на которое в текущий момент времени прибывает транспортное средство 100, является зарегистрированным парковочным местом 62. Таким образом, транспортное средство 100 может быть припарковано в автономном режиме на зарегистрированном парковочном месте 62.
[0141] <Конкретные операции устройства помощи при парковке транспортного средства>
Далее будут описаны конкретные операции устройства 10 помощи при парковке транспортного средства. ЦП ЭБУ 90 устройства 10 помощи при парковке транспортного средства сконфигурирован или запрограммирован с возможностью выполнения процедуры, показанной на ФИГ. 20 каждый раз, когда предварительно заданный промежуток времени истекает.
[0142] Следовательно, в заранее заданный момент времени ЦП начинает выполнять процесс, начиная с этапа 2000, а затем переходит к этапу 2005 для того, чтобы определить, не является ли значение флага X1_auto срабатывания переключателя помощи при парковки, равным «1». Значение флага X1_auto срабатывания переключателя помощи при парковке, устанавливается равным «1», когда (i) ЦП определяет, что транспортное средство 100 останавливается у въезда 62ent на парковочное место 62, (ii) ЦП определяет, что рассматриваемое парковочное место 62 не является зарегистрированным парковочным местом, и (iii) к изображению 51M переключателя помощи при парковке применяется сенсорное воздействие. С другой стороны, значение флага X1_auto срабатывания переключателя помощи при парковке, становится равным «0», когда парковка транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке завершена.
[0143] Если ЦП определяет «Да» на этапе 2005, то ЦП переходит к этапу 2010 для того, чтобы определить, является ли значение флага X1_exe процесса первого парковочного движения равным «0». Значение флага X1_exe процесса первого парковочного движения устанавливается равным «1», когда начинается выполнение процесса первого парковочного движения. С другой стороны, значение флага X1_exe процесса первого парковочного движения устанавливается равным «0», когда выполнение процесса первого парковочного движения прекращается.
[0144] Если ЦП определяет «Да» на этапе 2010, то ЦП переходит к этапу 2015, для того чтобы показать изображение 51C с камеры, изображение 51P вида сверху и изображение 52M главного переключателя регистрации на экране дисплея 50 (см. ФИГ. 9B). Затем ЦП переходит к этапу 2020, для того чтобы определить, является ли значение флага Xmain, срабатывания главного переключателя регистрации, равным «1». Значение флага Xmain, срабатывания главного переключателя регистрации, устанавливается равным «1», если к изображению 52M главного переключателя регистрации применяется сенсорное воздействие. В свою очередь, значение флага Xmain срабатывания главного переключателя регистрации, устанавливается равным «0», когда парковка транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке завершена.
[0145] Если ЦП определяет «Нет» на этапе 2020, то ЦП переходит к этапу 2025, для того чтобы прекратить показывать изображение 51C с камеры, изображение 51P вида сверху и изображение 51M переключателя помощи при парковке на экране дисплея 50 и показать изображение 52S выбора области парковки на экране дисплея 50 (см. ФИГ. 9C). Затем ЦП переходит к этапу 2030, для того чтобы определить, является ли значение флага Xselect завершения выбора равным «1». Значение флага Xselect завершения выбора устанавливается равным «1», если к изображению 52S выбора области парковки применяется сенсорное воздействие. С другой стороны, значение флага Xselect завершения выбора устанавливается равным «0», когда парковка транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке завершена.
[0146] Если ЦП определяет «Да» на этапе 2030, то ЦП переходит к этапу 2035, для того чтобы выполнить процедуру, показанную на ФИГ. 21. Следовательно, если ЦП переходит к этапу 2035, то ЦП начинает выполнять процесс этапа 2100 согласно ФИГ. 21, а затем переходит к этапу 2105, для того чтобы прекратить показывать изображение 52S выбора области парковки на экране дисплея 50 и показать изображение 51P вида сверху, изображение 52 линии разметки области парковки, изображение 53 кнопки настройки, изображение 57 кнопки смещения и изображение 58 кнопки регулировки угла на экране дисплея 50 (см. ФИГ. 9D).
[0147] Затем ЦП переходит к выполнению этапа 2110, для того чтобы определить, является ли значение флага Xset завершения настройки равным «1». Значение флага Xset завершения настройки устанавливается равным «1», если к изображению 53 кнопки настройки применяется сенсорное воздействие. С другой стороны, значение флага Xset завершения настройки устанавливается равным «0», когда начинается выполнение процесса первого парковочного движения.
[0148] Если ЦП определяет «Да» на этапе 2110, то ЦП переходит к выполнению этапа 2115, для того чтобы перестать показывать изображение 53 кнопки настройки, изображение 57 кнопки смещения и изображение 58 кнопки регулировки угла на экране дисплея 50, и показать изображение 51C с камеры, изображение 51P вида сверху и изображение 54 кнопки начала регистрации на экране дисплея 50 (см. ФИГ. 10A). После этого ЦП переходит к выполнению этапа 2120, для того чтобы установить область парковки 61, соответствующую изображению 52 линии разметки области парковки, в качестве зарегистрированной целевой области парковки 61set. Затем ЦП переходит к выполнению этапа 2125 для установки целевого маршрута Rtgt движения в качестве маршрута движения транспортного средства 100 в зарегистрированную целевую область парковки 61set. После этого ЦП переходит к выполнению этапа 2130 для получения предварительной информации Ient_pre о въезде, как описано выше, и сохранения в памяти полученной предварительной информации Ient_pre о въезде в ОЗУ.
[0149] Далее ЦП переходит к выполнению этапа 2135, для того чтобы определить, является ли значение флага Xreg_start начала регистрации равным «1». Значение флага Xreg_start начала регистрации устанавливается равным «1», если к изображению 54 кнопки начала регистрации применяется сенсорное воздействие. С другой стороны, значение флага Xreg_start начала регистрации устанавливается равным «0», когда начинается выполнение процесса первого парковочного движения.
[0150] Если ЦП определяет «Да» на этапе 2135, то ЦП переходит к выполнению этапа 2140, для того чтобы прекратить показывать изображение 54 кнопки начала регистрации на экране дисплея 50 и показать изображение 51C с камеры и изображение 51P вида сверху на экране дисплея 50 (см. ФИГ. 10B). Затем ЦП переходит к выполнению этапа 2145, для того чтобы начать выполнять процесс первого парковочного движения для перемещения транспортного средства 100 в зарегистрированную целевую область парковки 61set по целевому маршруту Rtgt движения. Далее ЦП переходит к выполнению этапа 2095 на ФИГ. 20, через этап 2195, для того чтобы завершить однократное выполнение этой процедуры.
[0151] В свою очередь, если ЦП определяет «Нет» на этапе 2135, то ЦП переходит к выполнению этапа 2095 на ФИГ. 20, через этап 2195, для того чтобы завершить однократное выполнение этой процедуры.
[0152] Также, если ЦП определяет «Нет» на этапе 2120, то ЦП переходит к выполнению этапа 2095 на ФИГ. 20, через этап 2195, для того чтобы завершить однократное выполнение этой процедуры.
[0153] Кроме того, если ЦП определяет «Нет» на этапе 2030 на ФИГ. 20, то ЦП переходит к выполнению этапа 2095, для того чтобы завершить однократное выполнение этой процедуры.
[0154] Также, если ЦП определяет «Нет» на этапе 2020, то ЦП переходит к выполнению этапа 2095, чтобы завершить однократное выполнение этой процедуры.
[0155] Если ЦП определяет «Нет» на этапе 2010, то ЦП переходит к выполнению этапа 2060, для того чтобы определить, является ли значение флага Xmid получения информации о середине пути равным «1». Значение флага Xmid получения информации о середине пути устанавливается равным «1», когда ЦП прогнозирует, что транспортное средство 100 продолжает двигаться в направлении назад прямо, не поворачивая до тех пор, пока ЦП не завершит парковку транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке. С другой стороны, значение флага Xmid получения информации о середине пути устанавливается равным «0», когда выполнение процесса на этапе 2065 завершено.
[0156] Если ЦП определяет «Да» на этапе 2060, то ЦП переходит к выполнению этапа 2065, для того чтобы получить предварительную информацию Imid_pre о середине пути, как описано выше, и сохранить в памяти полученную предварительную информацию Imid_pre о середине пути в ОЗУ. Далее ЦП переходит к выполнению этапа 2070.
[0157] С другой стороны, если ЦП определяет «Нет» на этапе 2060, то ЦП переходит к выполнению этапа 2070.
[0158] Если ЦП переходит к выполнению этапа 2070, то ЦП продолжает выполнять процесс первого парковочного движения. После этого ЦП переходит к выполнению этапа 2075, для того, чтобы определить, является ли значение флага Xpark_fin завершения парковки равным «1». Значение флага Xpark_fin завершения парковки устанавливается равным «1», когда транспортное средство 100 целиком переместилось в зарегистрированную целевую область парковки 61set. С другой стороны, значение флага Xpark_fin завершения парковки устанавливается равным «0», когда завершается выполнение процесса первого парковочного движения.
[0159] Если ЦП определяет «Да» на этапе 2075, то ЦП переходит к выполнению этапа 2080, для того чтобы завершить выполнение процесса первого парковочного движения. После чего ЦП переходит к выполнению этапа 2095, для того чтобы завершить однократное выполнение этой процедуры.
[0160] С другой стороны, если ЦП определяет «Нет» на этапе 2075, то ЦП переходит к выполнению этапа 2095, для того чтобы завершить однократное выполнение этой процедуры.
[0161] Если ЦП определяет «Нет» на этапе 2005, то ЦП переходит к выполнению этапа 2090, для того чтобы завершить представление изображения 51Р вида сверху и т.д. на экране дисплея 50. После чего ЦП переходит к выполнению этапа 2095, для того чтобы завершить однократное выполнение этой процедуры.
[0162] Кроме того, ЦП сконфигурирован или запрограммирован с возможностью выполнения процедуры, показанной на ФИГ. 22, каждый раз, когда истекает заранее заданный промежуток времени. Следовательно, в заранее заданный момент времени ЦП начинает выполнять процесс, начиная с этапа 2200 согласно ФИГ. 22, а затем переходит к выполнению этапа 2205, для того чтобы определить, является ли значение флага Xreg_req получения регистрационной информации равным «1». Значение флага Xreg_req получения регистрационной информации устанавливается равным «1», когда парковка транспортного средства 100 на парковочном месте 62 посредством процесса первого парковочного движения завершена. С другой стороны, значение флага Xreg_req получения регистрационной информации устанавливается равным «0», когда информация Ipark о парковочном месте зарегистрирована в ОЗУ.
[0163] Если ЦП определяет «Да» на этапе 2205, то ЦП переходит к выполнению этапа 2210, для того чтобы прекратить представление изображения 51С с камеры на экране дисплея 50 и показать изображение 51Р вида сверху, изображение 57 кнопки смещения, изображение 58 кнопки регулировки угла и изображение 55 кнопки регистрации на экране дисплея 50 (см. ФИГ. 10C). Затем ЦП переходит к выполнению этапа 2215, для того чтобы определить, является ли значение флага Xreg_det установления регистрации равным «1». Значение флага Xreg_det установления регистрации устанавливается равным «1», если к изображению 55 кнопки регистрации применяется сенсорное воздействие. С другой стороны, значение флага Xreg_det установления регистрации устанавливается равным «0», когда выполняется процесс этапа 2120.
[0164] Если ЦП определяет «Да» на этапе 2215, то ЦП переходит к выполнению этапа 2220, для того чтобы зарегистрировать в ОЗУ зарегистрированную информацию Ient_reg о въезде, зарегистрированную внутреннюю информацию Iin_reg и информацию Iarea_reg о зарегистрированной области в качестве информации Ipark о парковочном месте, как описано выше. Затем ЦП переходит к выполнению этапа 2295, для того чтобы завершить однократное выполнение этой процедуры.
[0165] В свою очередь, если ЦП определяет «Нет» на этапе 2215, то ЦП переходит к выполнению этапа 2295, для того чтобы завершить однократное выполнение этой процедуры.
[0166] Также, если ЦП определяет «Нет» на этапе 2205, то ЦП переходит к выполнению этапа 2295, для того чтобы завершить однократное выполнение этой процедуры.
[0167] Помимо этого, ЦП сконфигурирован или запрограммирован с возможностью выполнения процедуры, показанной на ФИГ. 23, каждый раз, когда истекает заранее заданный промежуток времени. Следовательно, в заранее заданный момент времени ЦП начинает выполнять процесс с этапа 2300, согласно ФИГ. 23, а затем переходит к выполнению этапа 2305, для того чтобы определить, является ли значение флага X2_auto, срабатывания переключателя помощи при парковке, равным «1».” Значение флага X2_auto срабатывания переключателя помощи при парковке, устанавливается равным «1», когда (i) ЦП определяет, что транспортное средство 100 останавливается около парковочного места 62, (ii) ЦП определяет, что рассматриваемое парковочное место 62 является зарегистрированным парковочным местом, и (iii) к изображению 51M переключателя помощи при парковке применяется сенсорное воздействие. С другой стороны, значение флага X2_auto срабатывания переключателя помощи при парковке, устанавливается равным «0», когда парковка транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке завершена.
[0168] Если ЦП определяет «Да» на этапе 2305, то ЦП переходит к выполнению этапа 2310, для того чтобы определить, является ли значение флага X2_exe процесса второго парковочного движения равным «0». Значение флага X2_exe процесса второго парковочного движения устанавливается равным «1», когда начинается выполнение процесса второго парковочного движения. С другой стороны, значение флага X2_exe процесса второго парковочного движения устанавливается равным «0», когда выполнение процесса второго парковочного движения прекращается.
[0169] Если ЦП определяет «Да» на этапе 2310, то ЦП переходит к выполнению этапа 2315, для того чтобы прекратить представление изображения 51M переключателя помощи при регистрации на экране дисплея 50 и продемонстрировать изображение 52M главного переключателя регистрации и изображение 56 кнопки начала парковки на экране дисплея 50 (см. ФИГ. 19B).
[0170] Затем ЦП переходит к выполнению этапа 2317, для того чтобы определить, является ли значение флага Xmain срабатывания главного переключателя регистрации равным «0». Значение флага Xmain срабатывания главного переключателя регистрации, устанавливается равным «1», если к изображению 52M главного переключателя регистрации применяется сенсорное воздействие. С другой стороны, значение флага Xmain срабатывания главного переключателя регистрации, устанавливается равным «0», когда парковка транспортного средства 100 на парковочном месте 62 при управлении помощью при парковке завершена.
[0171] Если ЦП определяет «Да» на этапе 2317, то ЦП переходит к выполнению этапа 2320, для того чтобы определить, является ли значение флага Xpark_start начала парковки равным «1». Значение флага Xpark_start начала парковки становится равным «1», если к изображению 56 кнопки начала парковки применяется сенсорное воздействие. С другой стороны, значение флага Xpark_start начала парковки устанавливается равным «0», когда начинается выполнение процесса второго парковочного движения.
[0172] Если ЦП определяет «Да» на этапе 2320, то ЦП переходит к выполнению этапа 2325, для того чтобы завершить представление изображения 52M главного переключателя регистрации и изображения 56 кнопки начала парковки на экране дисплея 50. При этом ЦП продолжает показывать изображение 51C с камеры и изображение 51P вида сверху на экране дисплея 50 (см. ФИГ. 19C). Затем ЦП переходит к выполнению этапа 2330, для того чтобы установить целевую область парковки 61tgt в качестве области парковки 61, зарегистрированной в информации Ipark о парковочном месте. После этого ЦП переходит к выполнению этапа 2335 для установки целевого маршрута Rtgt движения в качестве маршрута движения транспортного средства 100 в целевую область парковки 61tgt. Затем ЦП переходит к выполнению этапа 2340, для того чтобы начать выполнение процесса второго парковочного движения. Далее ЦП переходит к выполнению этапа 2395, для того чтобы завершить однократное выполнение этой процедуры.
[0173] С другой стороны, если ЦП определяет «Нет» на этапе 2320, то ЦП переходит к выполнению этапа 2395, для того чтобы завершить однократное выполнение этой процедуры.
[0174] Если ЦП определяет «Нет» на этапе 2317, то ЦП переходит к выполнению этапа 2342, для того чтобы установить значение флага X1_auto срабатывания переключателя помощи при парковке на «1». После этого ЦП переходит к выполнению этапа 2395, для того чтобы завершить однократное выполнение этой процедуры. После чего ЦП определяет «Да» на этапе 2005 согласно ФИГ. 20.
[0175] Если ЦП определяет «Да» на этапе 2310, то ЦП переходит к выполнению этапа 2345, для того чтобы выполнить процесс второго парковочного движения. Затем ЦП переходит к выполнению этапа 2350, для того чтобы определить, является ли значение флага Xpark_fin завершения парковки равным «1». Значение флага Xpark_fin завершения парковки устанавливается равным «1», когда транспортное средство 100 целиком переместилось в целевую область парковки 61tgt. С другой стороны, значение флага Xpark_fin завершения парковки устанавливается равным «0», когда прекращается выполнение процесса второго парковочного движения.
[0176] Если ЦП определяет «Да» на этапе 2350, то ЦП переходит к выполнению этапа 2355, для того чтобы прекратить выполнение процесса второго парковочного движения. После этого ЦП переходит к выполнению этапа 2395, для того чтобы завершить однократное выполнение этой процедуры.
[0177] С другой стороны, если ЦП определяет «Нет» на этапе 2350, то ЦП переходит к выполнению этапа 2395, для того чтобы завершить однократное выполнение этой процедуры.
[0178] Если ЦП определяет «Нет» на этапе 2305, то ЦП переходит к выполнению этапа 2360, для того чтобы завершить представление изображения 51Р вида сверху и т.д. на экране дисплея 50. После этого ЦП переходит к выполнению этапа 2395, для того чтобы завершить однократное выполнение этой процедуры.
[0179] Были описаны конкретные операции устройства 10 помощи при парковке транспортного средства. Согласно устройству 10 помощи при парковке транспортного средства в качестве зарегистрированной информации Ient_reg о въезде указывается информация о характерных элементах F на поверхности земли 63 в парковочном месте 62 и/или вокруг него, а не информация о характерных элементах стоящего(-их) объекта(-ов) в парковочном месте 62 и/или вокруг него (см. этап 2220 на ФИГ. 22). Следовательно, можно уверенно определить, что характерные элементы Fent на въезде, полученные в текущий момент времени, являются зарегистрированными характерными элементами Fent_reg на въезде, когда транспортное средство 100 прибывает на въезд 62ent зарегистрированного парковочного места 62, если ситуация вокруг транспортного средства 100 и парковочного места 62 изменяется между временем, когда регистрируемая информация Ient_reg о въезде была исходно зарегистрирована и временем прибытия транспортного средства 100 на въезд 62ent зарегистрированного парковочного места 62 в текущий момент времени. И следовательно, можно с уверенностью определить, что парковочное место 62, на которое в текущий момент времени прибывает транспортное средство 100, является зарегистрированным парковочным местом 62. Таким образом, транспортное средство 100 может быть припарковано в автономном режиме на зарегистрированном парковочном месте 62.
[0180] Следует отметить, что изобретение не ограничено вышеупомянутыми вариантами осуществления изобретения, и возможны различные модификации изобретения в пределах его объема.
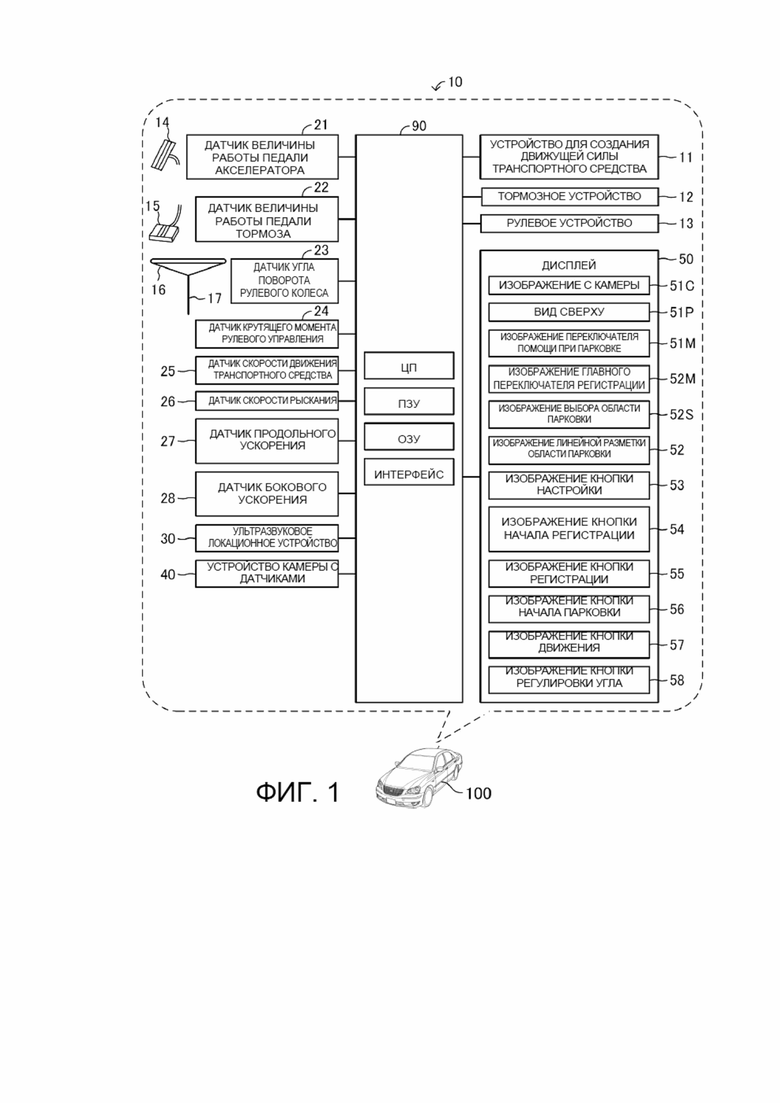
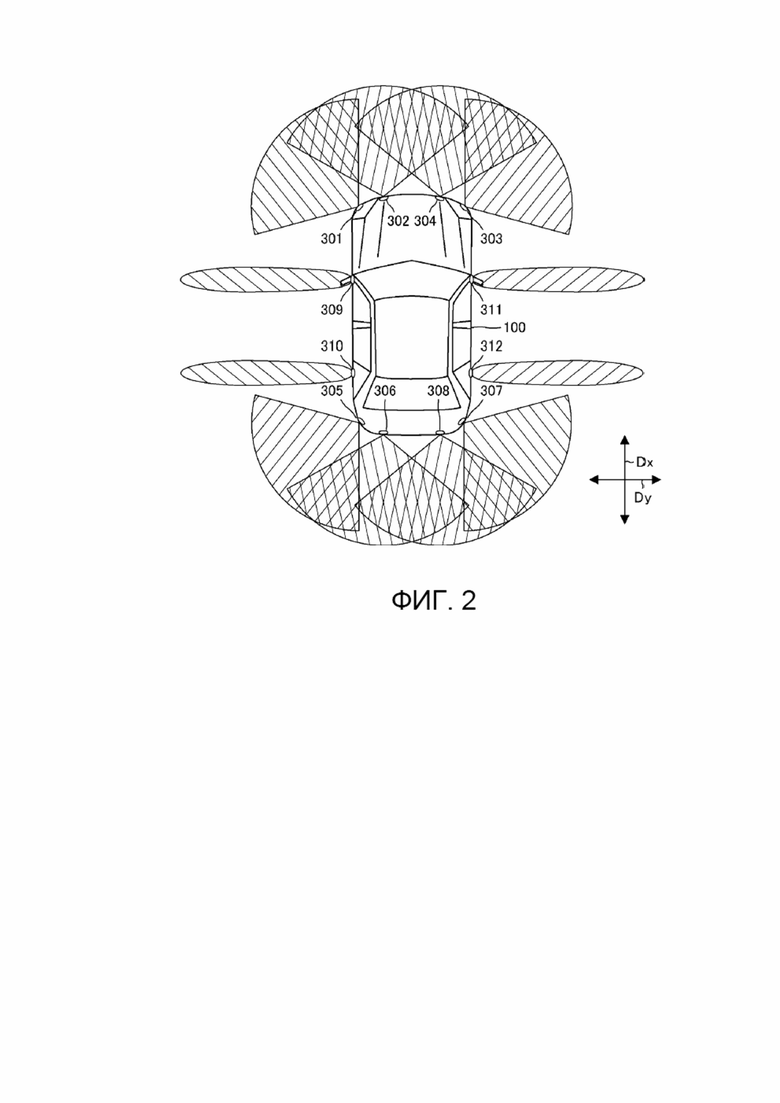
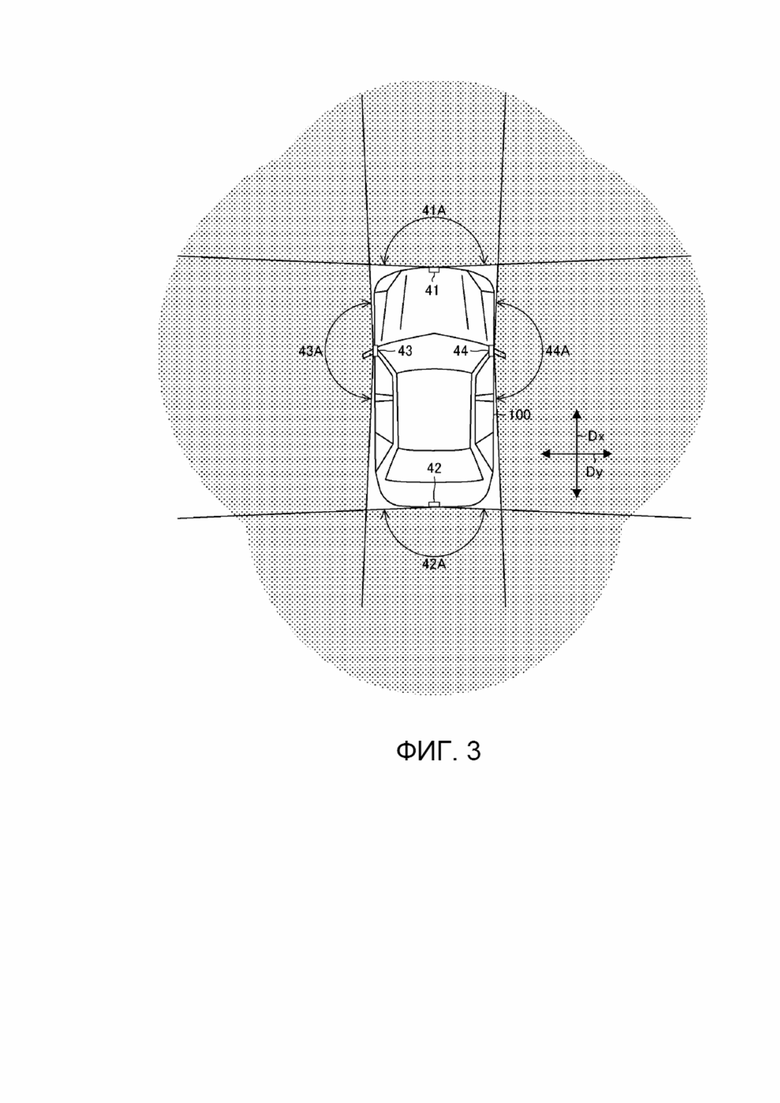
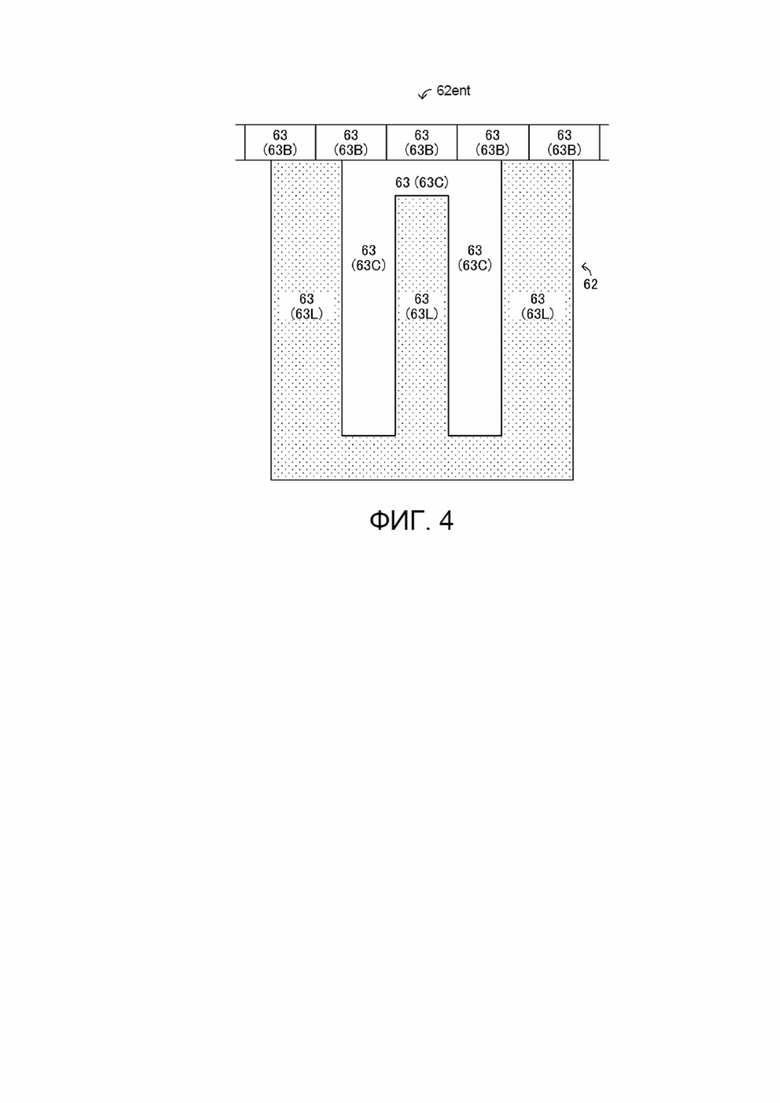
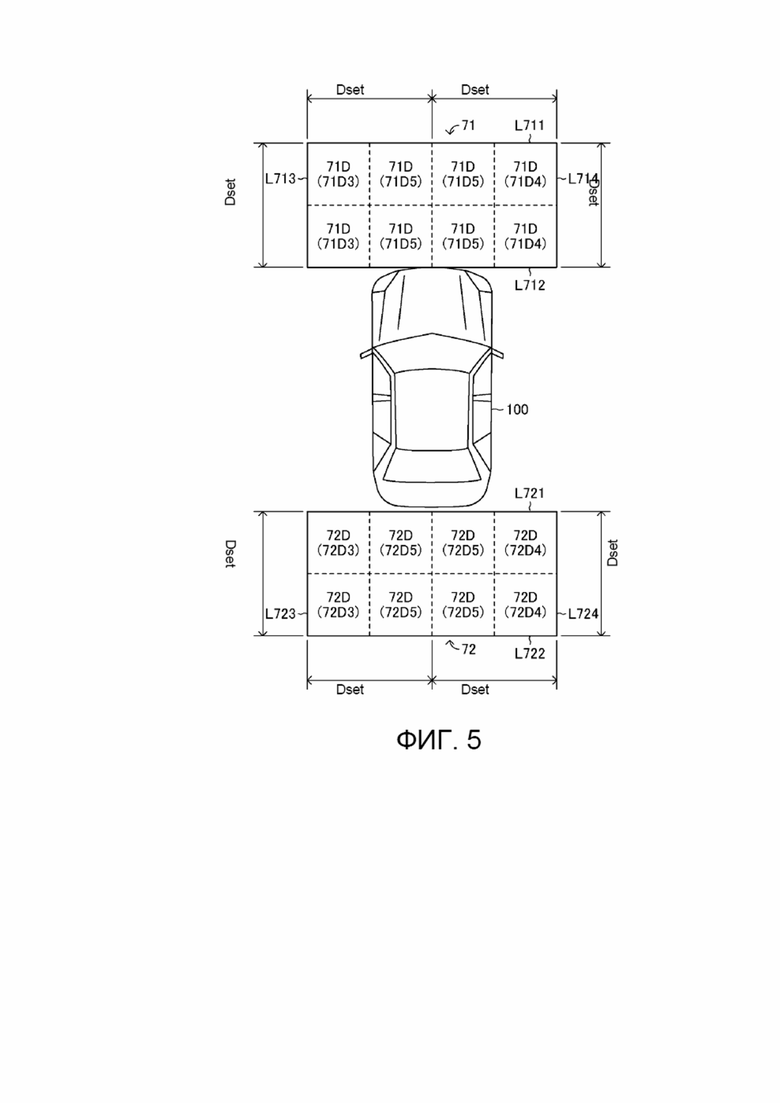
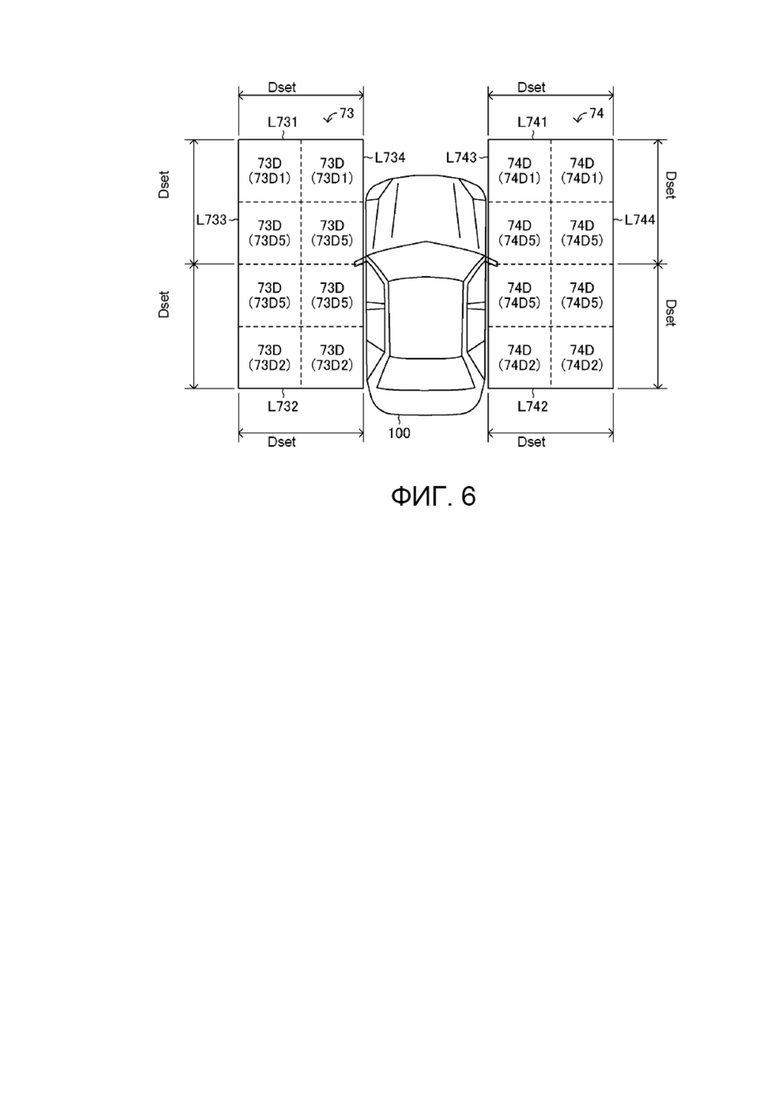
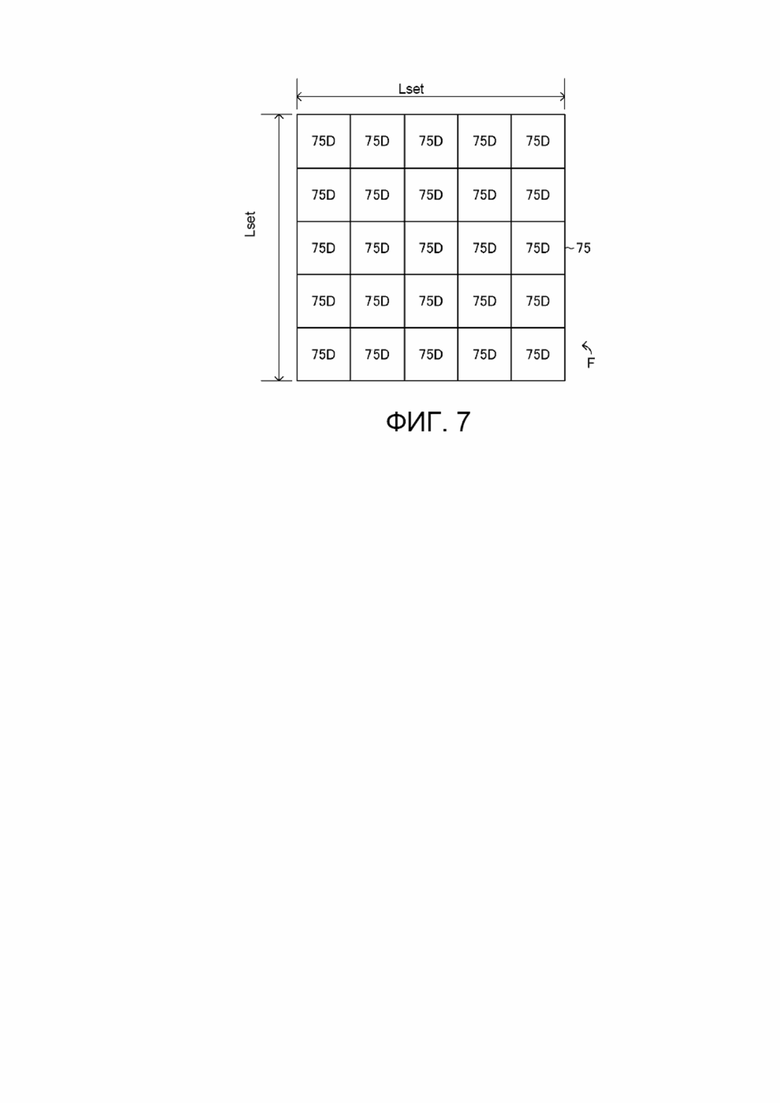
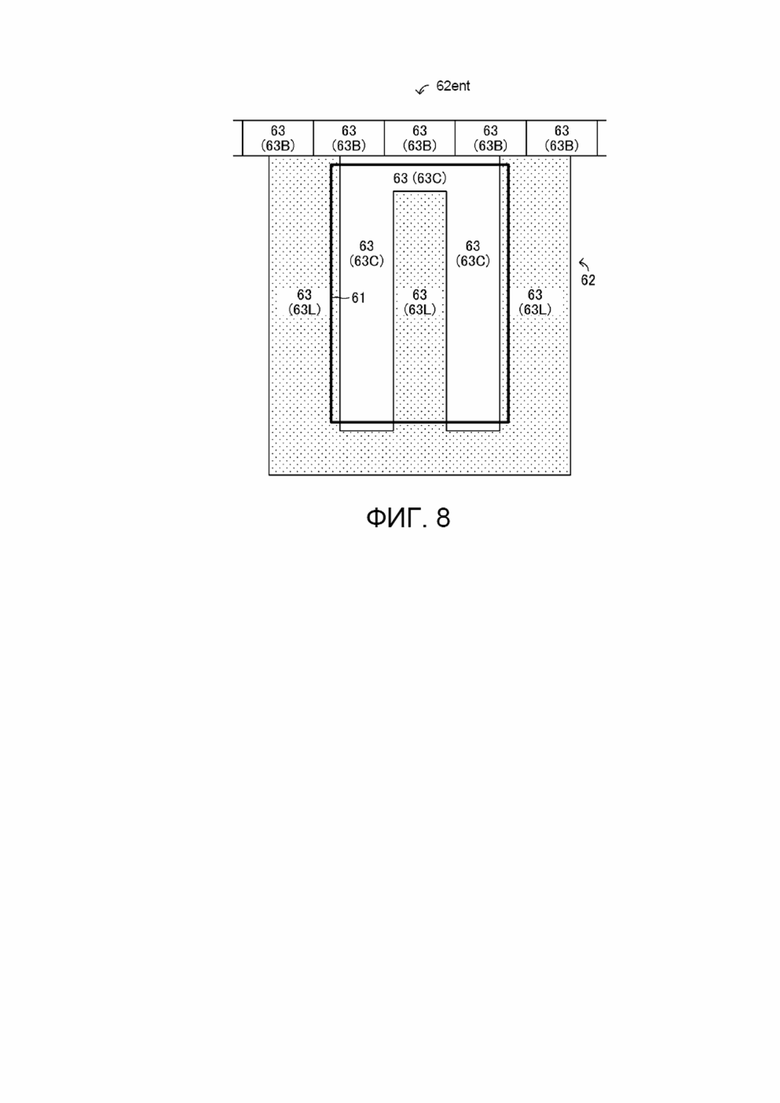
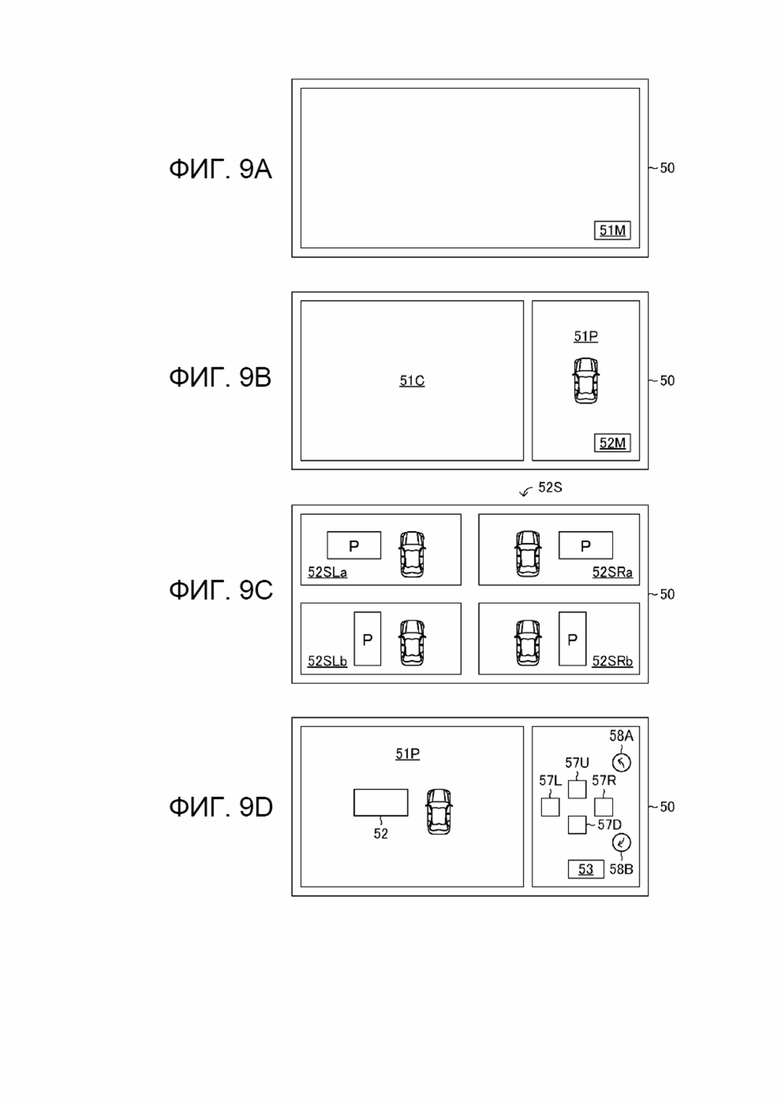
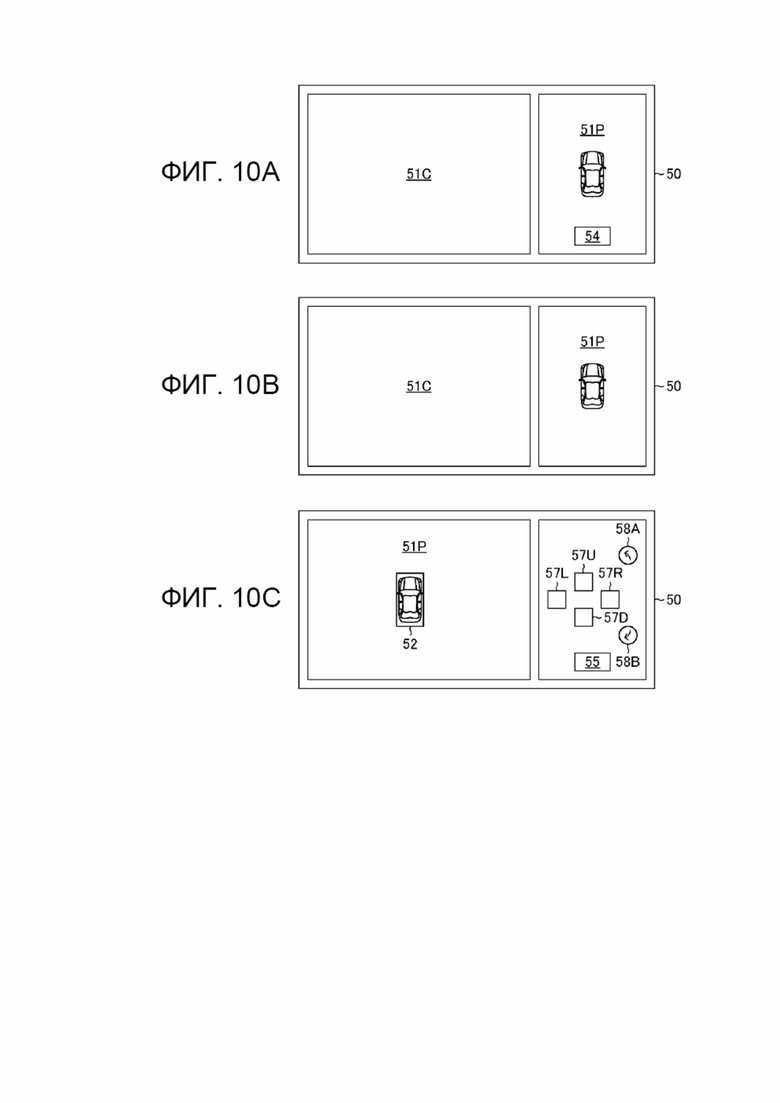
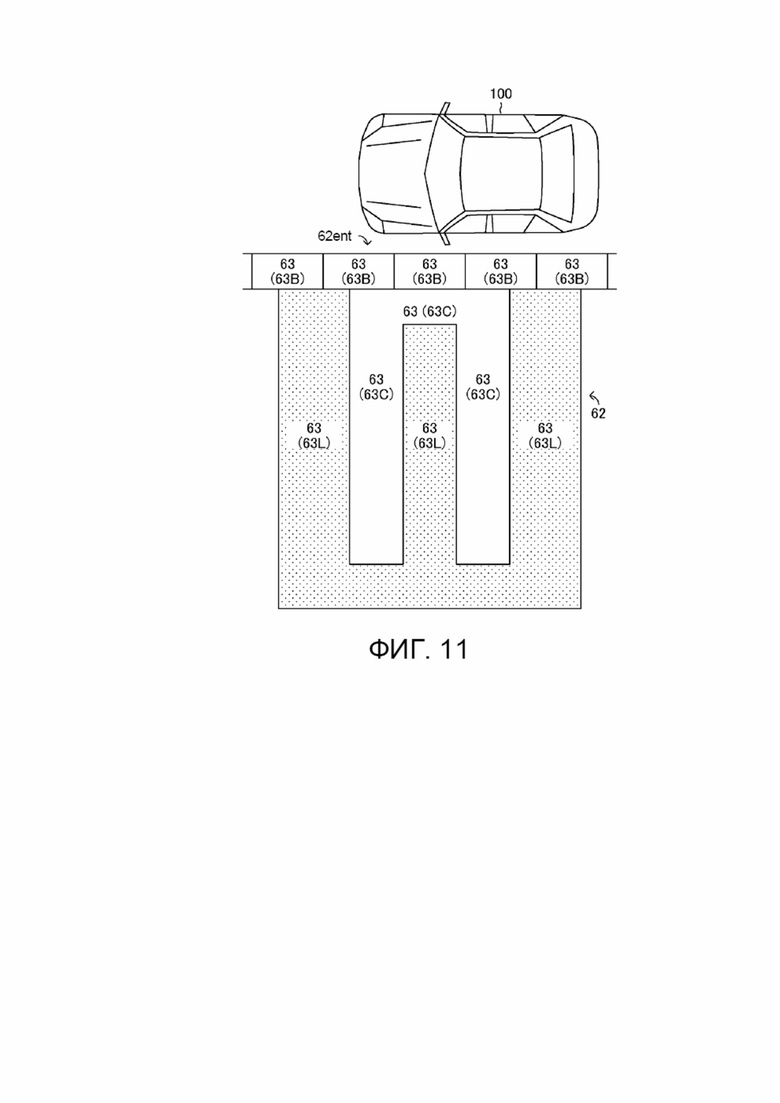
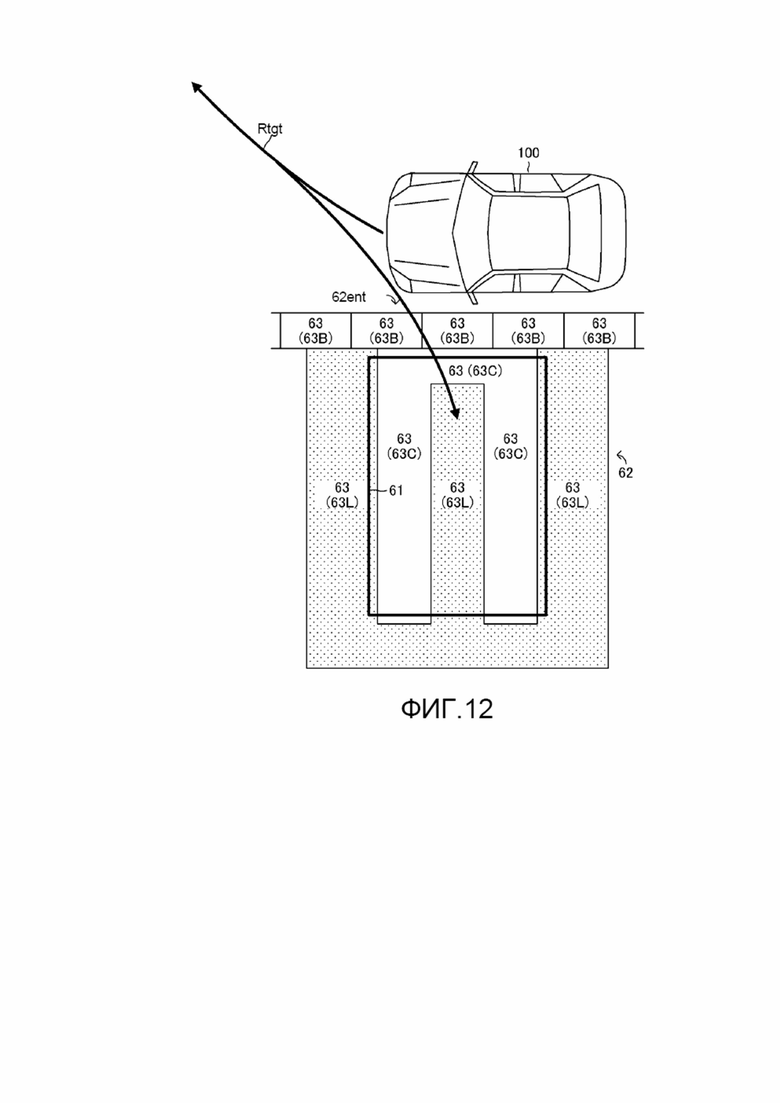
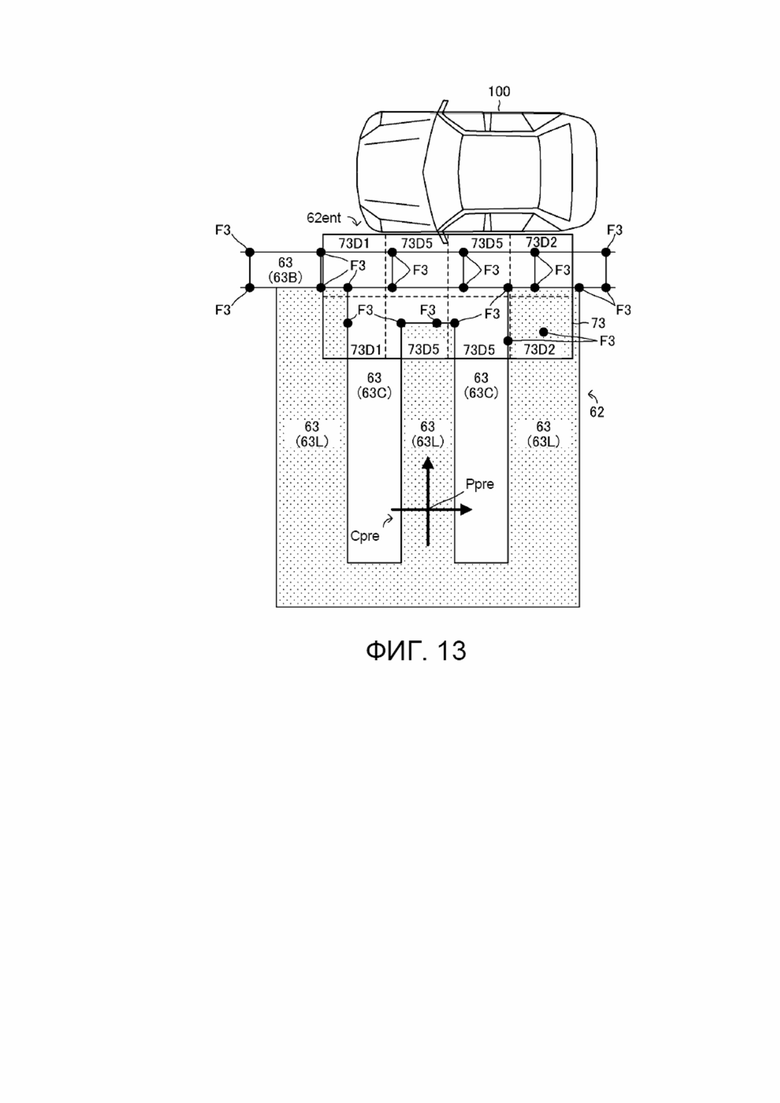
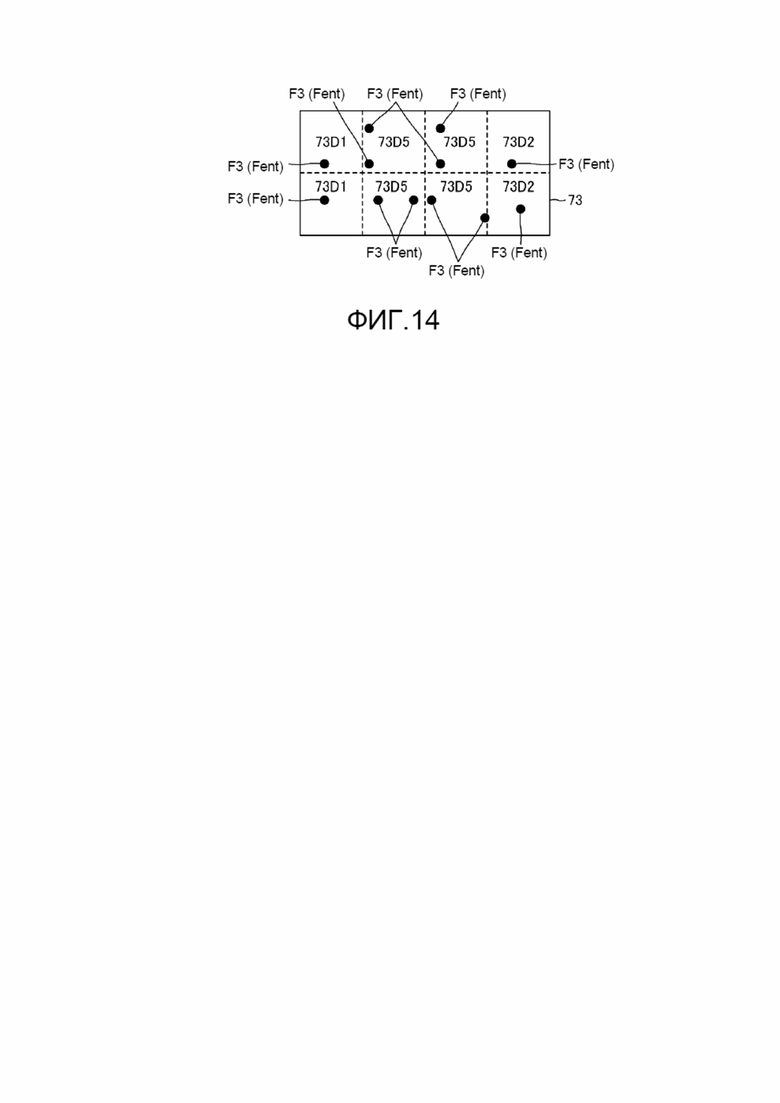
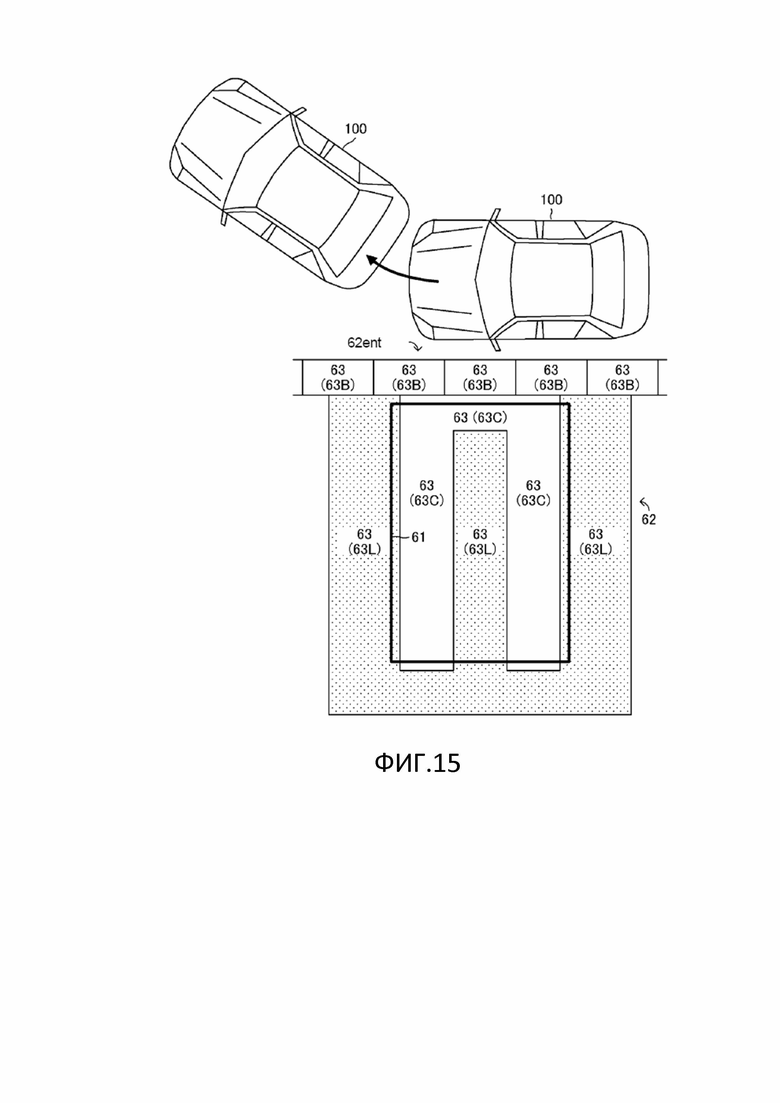
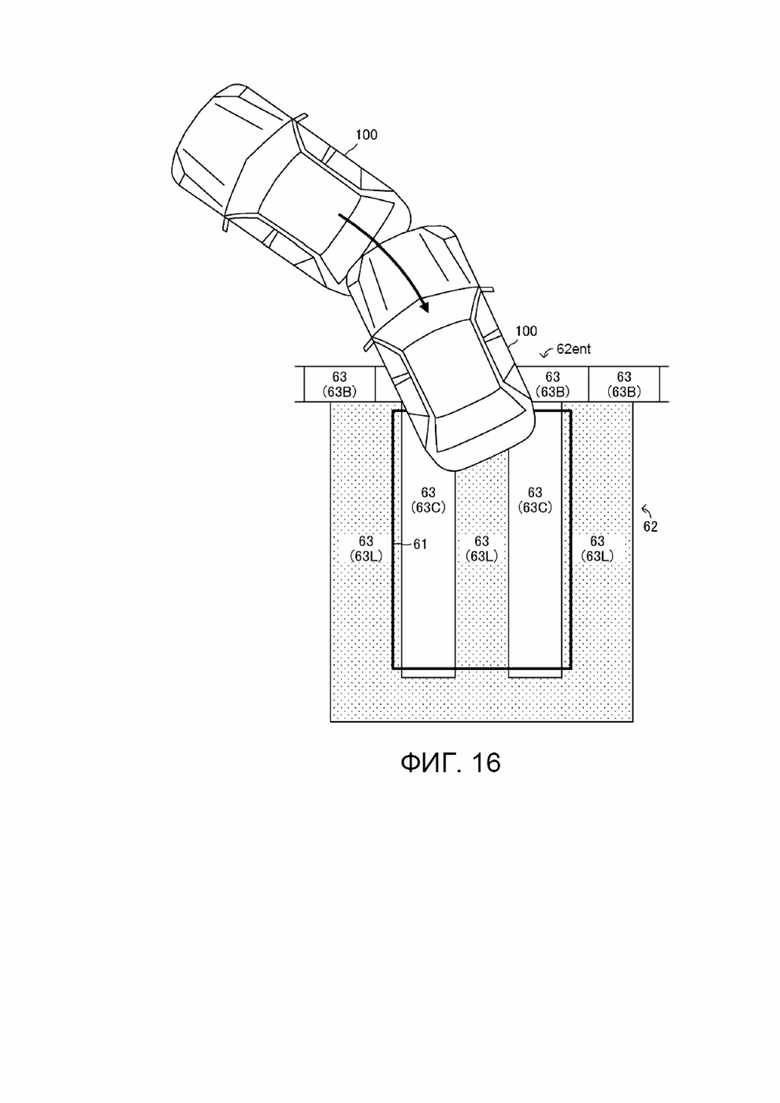
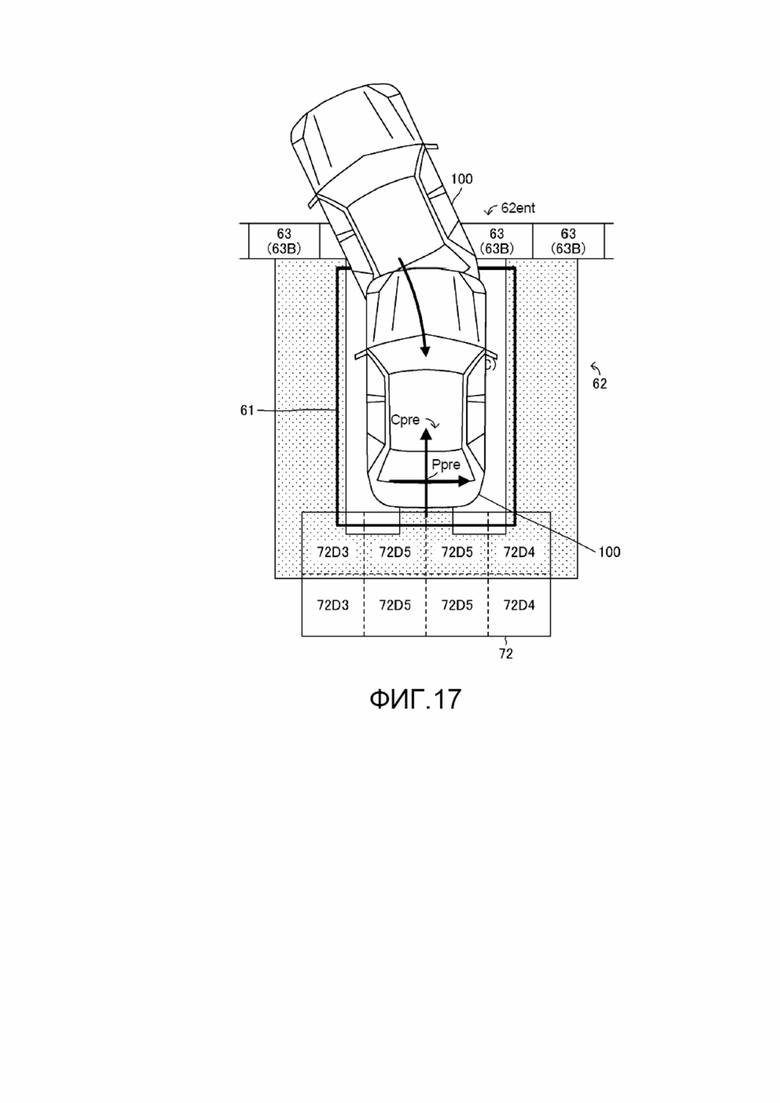
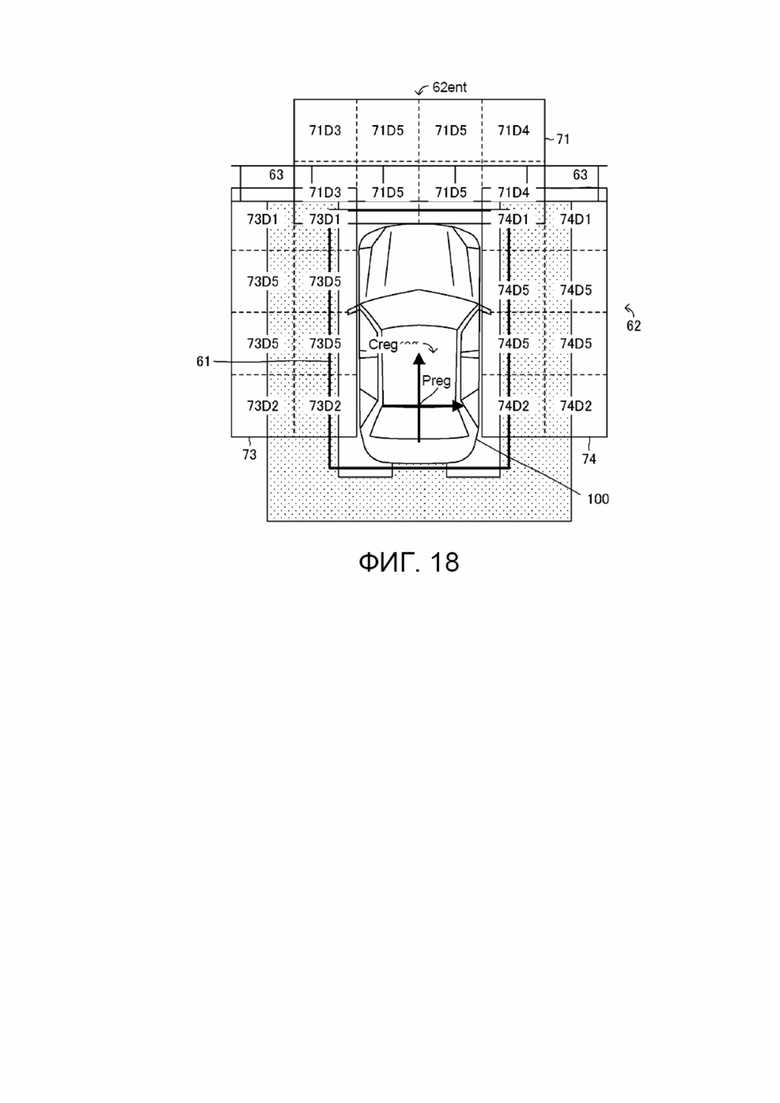
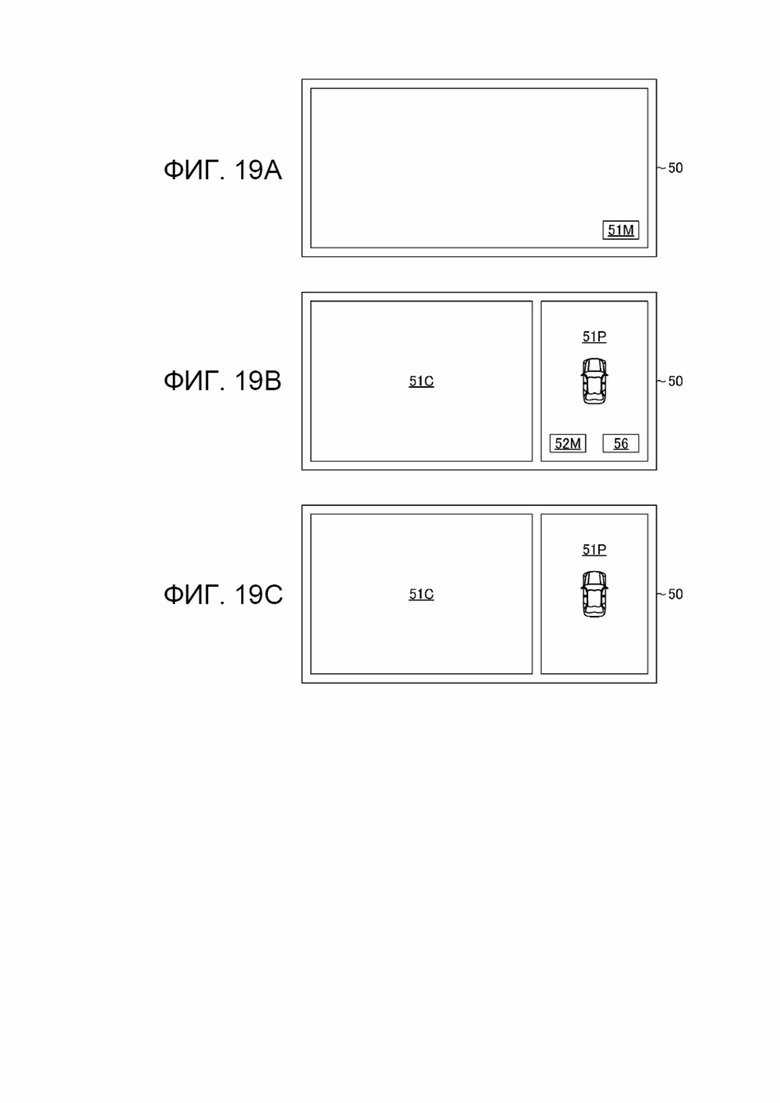
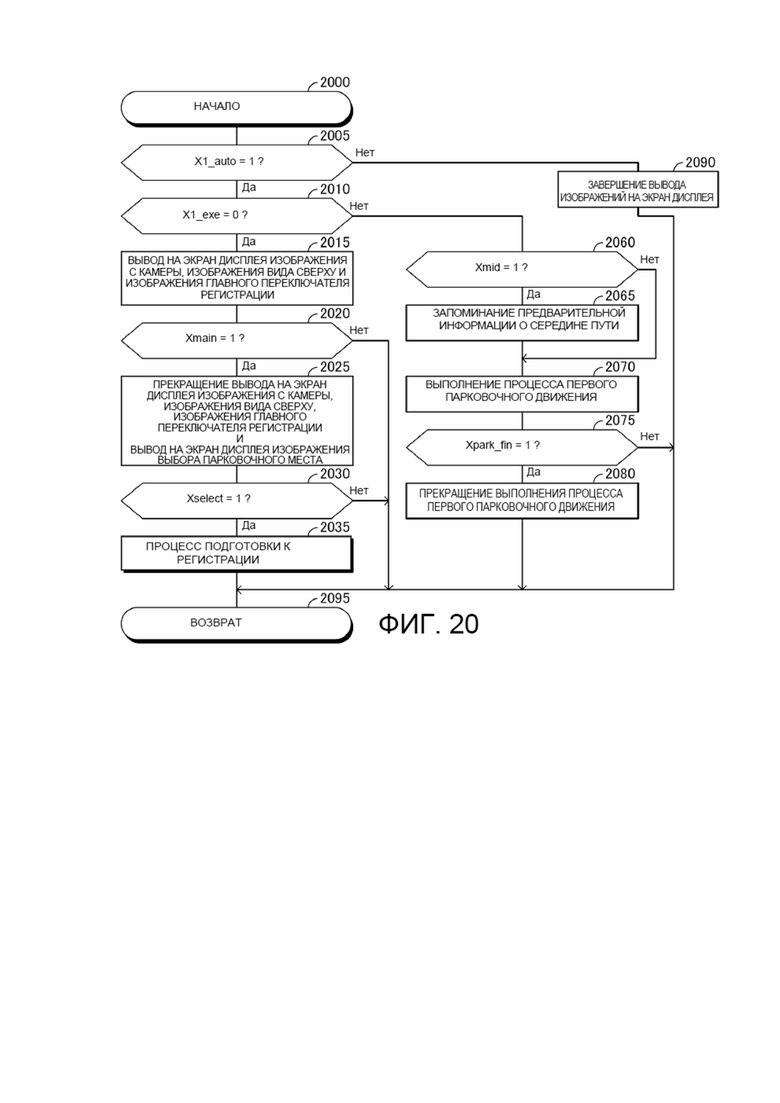
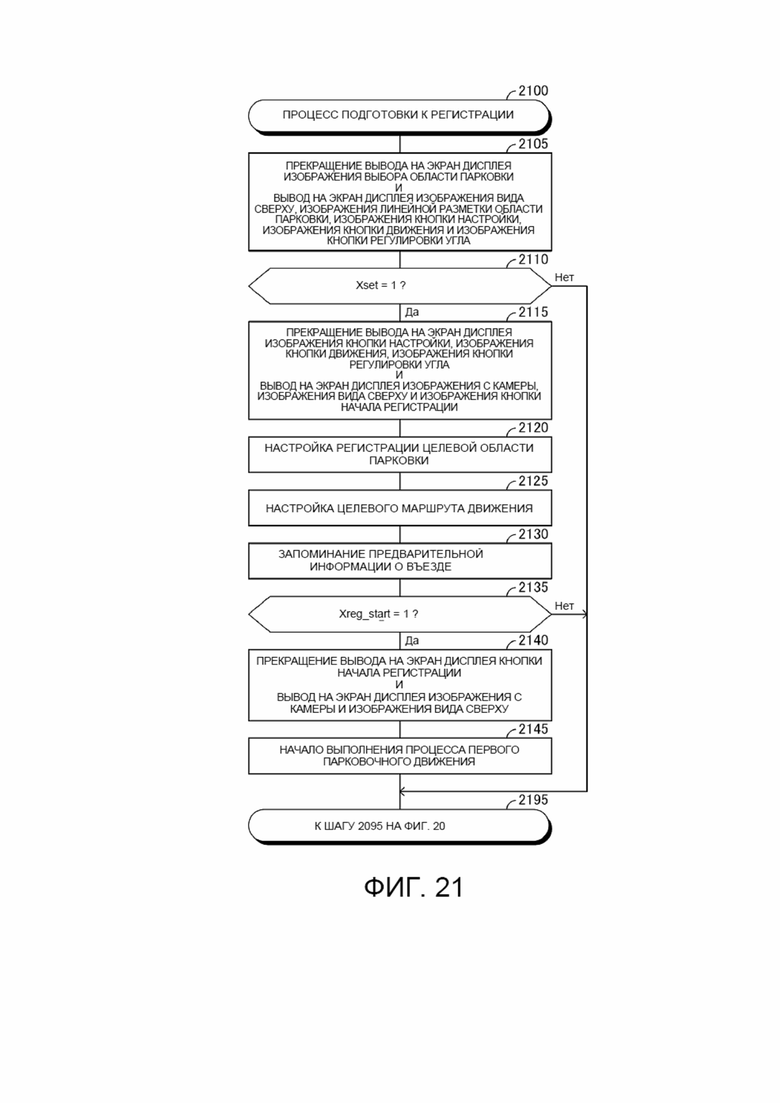
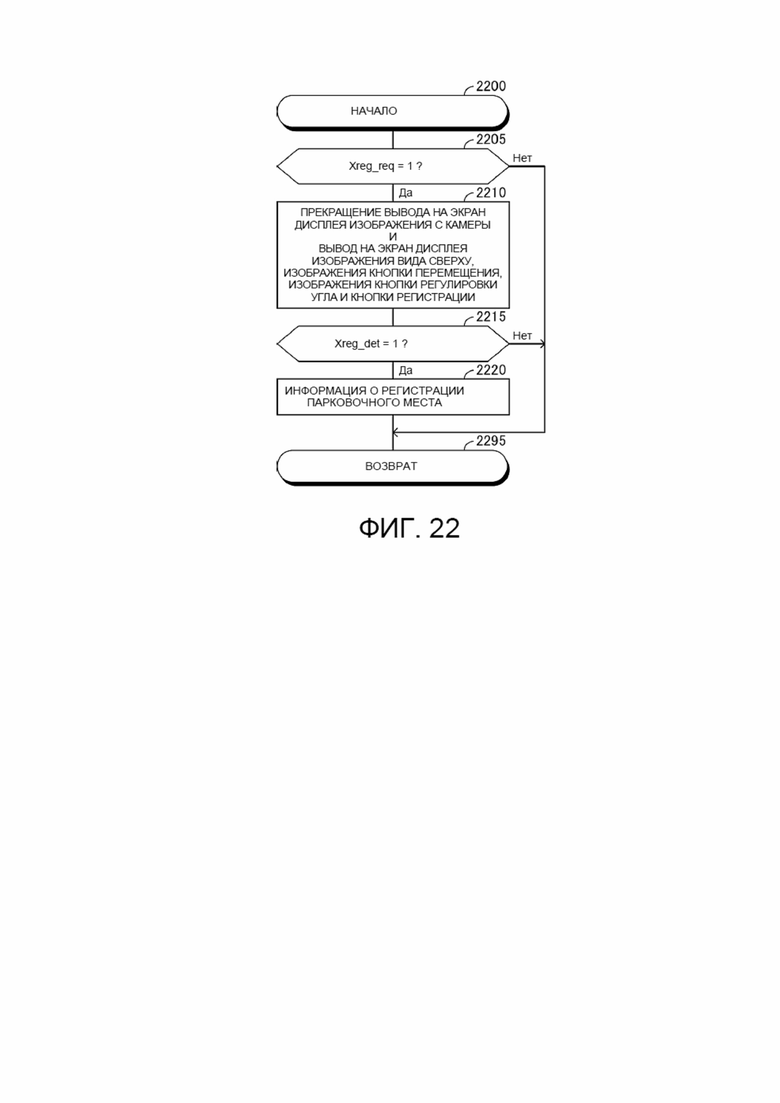
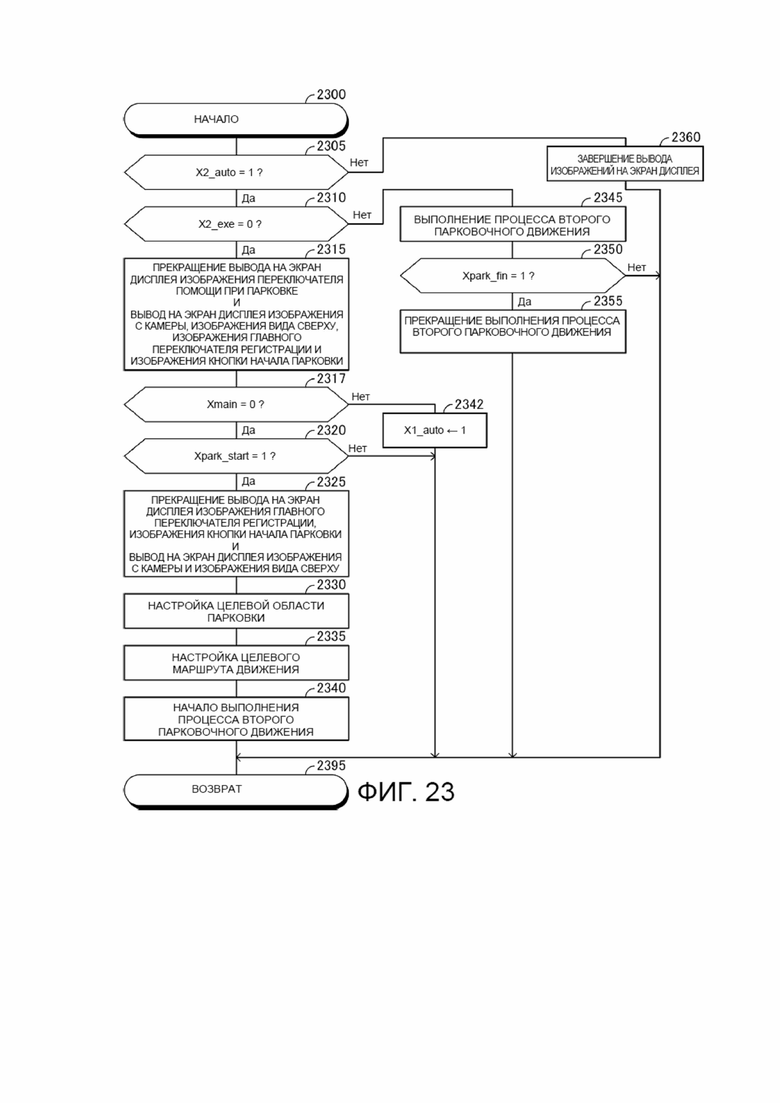
Изобретение относится к устройству помощи при парковке транспортного средства. Устройство помощи при парковке транспортного средства содержит камеру, установленную на транспортном средстве для получения изображений пространства, и электронный блок управления, который может выполнять управление помощью при парковке для осуществления парковки транспортного средства в автономном режиме на парковочном месте с использованием информации о парковочном месте. Электронный блок управления выполнен с возможностью получать изображение парковочного места, сделанное камерой, в качестве изображения с камеры в тот момент, когда транспортное средство останавливается около парковочного места, получать характерные элементы поверхности земли на въезде в парковочное место в качестве характерных элементов на въезде, выполнять управление помощью при парковке с использованием информации о парковочном месте и регистрировать информацию о парковочном месте, содержащую информацию о характерных элементах на въезде в качестве информации о характерных элементах на въезде. Достигается повышение безопасности водителя транспортного средства. 9 з.п. ф-лы, 23 ил.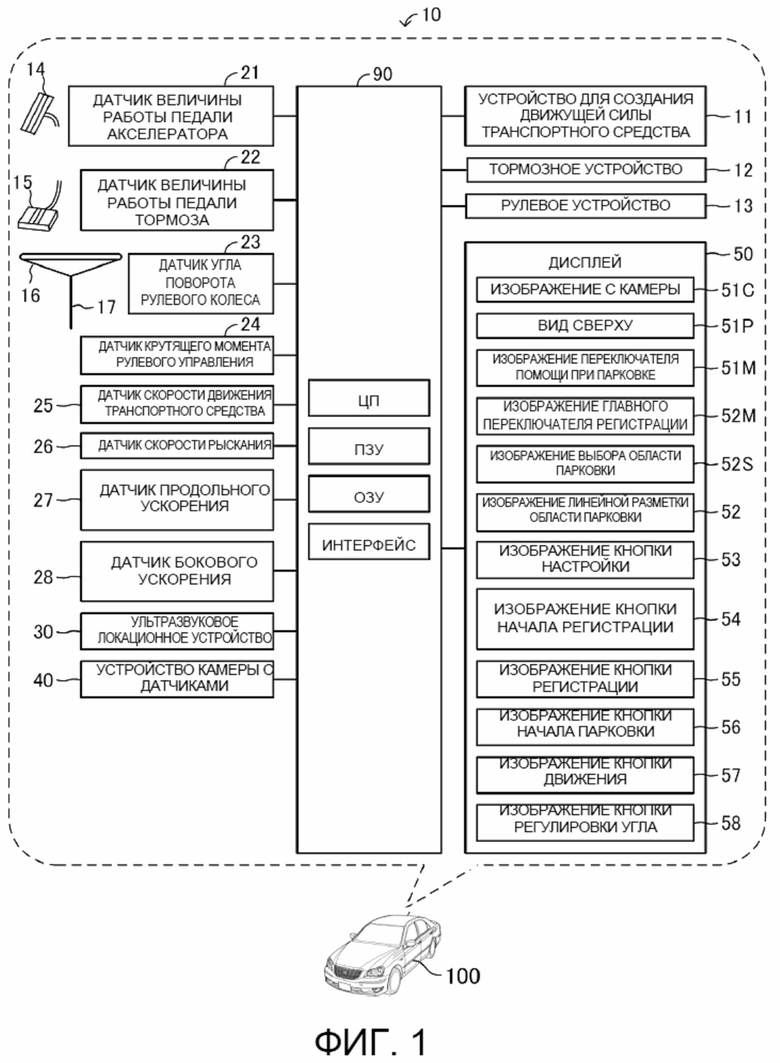
1. Устройство (10) помощи при парковке транспортного средства, содержащее:
по меньшей мере одну камеру (45), установленную на транспортном средстве (100) для получения изображений пространства, окружающего транспортное средство (100); и
электронный блок (90) управления, который может выполнять управление помощью при парковке для осуществления парковки транспортного средства (100) в автономном режиме на парковочном месте (62) с использованием информации о парковочном месте (62), полученной в качестве информации о парковочном месте из изображения, сделанного по меньшей мере одной камерой (45),
характеризующееся тем, что:
электронный блок (90) управления выполнен с возможностью:
получать изображение парковочного места (62), сделанное по меньшей мере одной камерой (45), в качестве изображения с камеры в тот момент, когда транспортное средство (100) останавливается около парковочного места (62);
получать характерные элементы поверхности земли на въезде (62ent) в парковочное место (62) в качестве характерных элементов на въезде, полученных из изображения с камеры;
выполнять управление помощью при парковке с использованием информации о парковочном месте, полученной из изображения с камеры, полученного в текущий момент времени; и
регистрировать информацию о парковочном месте, содержащую информацию о характерных элементах на въезде в качестве информации о характерных элементах на въезде; и
электронный блок (90) управления дополнительно выполнен с возможностью:
получать изображение с камеры, когда транспортное средство (100) останавливается около неидентифицированного парковочного места после того, как электронный блок (90) управления зарегистрировал информацию о парковочном месте;
получать характерные элементы поверхности земли на въезде в неидентифицированное парковочное место в качестве не подвергнутых сопоставлению характерных элементов на въезде из изображения с камеры, полученного в текущий момент времени;
определять, является ли неидентифицированное парковочное место зарегистрированным парковочным местом (62) путем сравнения информации о не подвергнутых сопоставлению характерных элементах на въезде с информацией о характерных элементах на въезде, причем зарегистрированное парковочное место представляет собой парковочное место (62), соответствующее информации о зарегистрированном парковочном месте; и
выполнять управление помощью при парковке с использованием полученной в текущий момент времени информации о парковочном месте и информации о зарегистрированном парковочном месте, когда электронный блок (90) управления определяет, что неидентифицированное парковочное место является зарегистрированным парковочным местом (62).
2. Устройство (10) помощи при парковке транспортного средства по п. 1, в котором:
электронный блок (90) управления выполнен с возможностью:
разделять изображение с камеры на предварительно заданные выделенные области (71D, 72D, 73D, 74D); и
получать по меньшей мере один характерный элемент из каждой из предварительно заданных выделенных областей (71D, 72D, 73D, 74D); и
характерные элементы на въезде представляют собой характерные элементы, полученные из предварительно заданных выделенных областей (71D, 72D, 73D, 74D).
3. Устройство (10) помощи при парковке транспортного средства по п. 2, в котором:
предварительно заданные выделенные области (71D, 72D, 73D, 74D) имеют одинаковый размер.
4. Устройство (10) помощи при парковке транспортного средства по любому из пп. 2 и 3, в котором:
предварительно заданные выделенные области (71D, 72D, 73D, 74D) не перекрывают друг друга.
5. Устройство (10) помощи при парковке транспортного средства по любому из пп. 2 и 3, в котором:
электронный блок (90) управления выполнен с возможностью получать большее число характерных элементов на въезде из предварительно заданной выделенной области (71D5, 72D5, 73D5, 74D5), относительно близкой к середине въезда (62ent) на парковочное место (62), чем из предварительно заданной выделенной области (71D3, 71D4, 72D3, 72D4, 73D1, 73D2, 74D1, 74D2), расположенной относительно удаленно от середины въезда (62ent) на парковочное место (62).
6. Устройство (10) помощи при парковке транспортного средства по любому из пп. 2 и 3, в котором:
электронный блок (90) управления выполнен с возможностью получать предварительно заданное количество характерных элементов на въезде из каждой предварительно заданной выделенной области (71D, 72D, 73D, 74D); и
электронный блок (90) управления дополнительно выполнен с возможностью получать большее число характерных элементов из предварительно заданной выделенной области (71D, 72D, 73D, 74D), из которой электронный блок (90) управления получил предварительно заданное число характерных элементов на въезде, когда электронный блок (90) управления не может получить предварительно заданное число характерных элементов на въезде из одной или более предварительно заданных выделенных областей (71D, 72D, 73D, 74D).
7. Устройство (10) помощи при парковке транспортного средства по любому из пп. 1 и 2, в котором:
информация о характерных элементах на въезде содержит информацию о характеристике яркости каждого из характерных элементов на въезде на изображении с камеры.
8. Устройство (10) помощи при парковке транспортного средства по любому из пп. 1 и 2, в котором:
информация о характерных элементах на въезде содержит информацию о местоположении каждого из характерных элементов на въезде относительно предварительно определенного местоположения на парковочном месте (62).
9. Устройство (10) помощи при парковке транспортного средства по любому из пп. 1 и 2, в котором:
электронный блок (90) управления выполнен с возможностью выполнять управление помощью при парковке с использованием полученной в текущий момент времени информации о парковочном месте, когда электронный блок (90) управления определяет, что неидентифицированное парковочное место не является зарегистрированным парковочным местом (62).
10. Устройство (10) помощи при парковке транспортного средства по любому из пп. 1 и 2, в котором:
по меньшей мере одна камера (45) содержит:
переднюю камеру (41), которая получает изображение вида спереди транспортного средства (100);
заднюю камеру (42), которая получает изображение вида позади транспортного средства (100);
левую камеру (43), которая получает изображение вида с левой стороны транспортного средства (100) и
правую камеру (44), которая получает изображение вида с правой стороны транспортного средства (100).
| US 2019039605 A1, 07.02.2019 | |||
| US 9183638 B2, 10.11.2015 | |||
| СПОСОБ И СИСТЕМА ДЛЯ НАДЕЖНОГО ТУННЕЛИРОВАНИЯ ПРОТОКОЛА ПО НТТР | 2011 |
|
RU2580097C2 |

