[0001]
Настоящее изобретение относится к способу управления парковкой и аппаратуре управления парковкой.
[УРОВЕНЬ ТЕХНИКИ]
[0002]
Известна технология, позволяющая оператору дистанционно управлять транспортным средством, в которой, когда транспортное средство припарковано в парковочном пространстве, транспортное средство управляется для остановки, если обнаружено препятствие (патентный документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2008-74296A
[СУЩНОСТЬ ИЗОБРЕТЕНИЯ]
[Проблемы, решаемые изобретением]
[0004]
В вышеприведенном уровне техники после того, как транспортное средство останавливается из-за обнаружения препятствия, оператор должен дать инструкцию или подобное для следующего направления парковки, чтобы парковать транспортное средство в следующее парковочное пространство, что может налагать нагрузку на оператора.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы уменьшить нагрузку, налагаемую на оператора, путем предварительного передвижения транспортного средства в направлении, основанном на следующем направлении парковки, даже когда однажды определено, что парковка невозможна, и транспортное средство покидает целевую позицию парковки.
[Средства для решения задач]
[0006]
Настоящее изобретение решает вышеуказанную задачу посредством, когда управление парковкой в целевую позицию парковки приостанавливается и транспортное средство покидает целевую позицию парковки, вычисления направления передвижения транспортного средства на основе направления парковки, когда транспортное средство припарковано в следующей целевой позиции парковки, и передвижения транспортного средства на основе вычисленного направления передвижения.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению, даже когда однажды определено, что парковка невозможна, и транспортное средство покидает целевую позицию парковки, транспортное средство предварительно передвигается в направлении, основанном на следующем направлении парковки, и, следовательно, возможно предотвратить выдачу оператором инструкции или подобного для следующего направления парковки и облегчать нагрузку, налагаемую на оператора.
[КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ]
[0008]
Фиг.1 - блок-схема, иллюстрирующая пример системы управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг.2А - схема, описывающая первую схему обнаружения в качестве примера способа обнаружения позиции оператора.
Фиг. 2B - схема для описания второй схемы обнаружения в качестве примера способа обнаружения позиции оператора.
Фиг.2C - схема для описания третьей схемы обнаружения в качестве примера способа обнаружения позиции оператора.
Фиг.2D схема для описания четвертой схемы обнаружения в качестве примера способа обнаружения позиции оператора.
Фиг.3А - схема для описания первой схемы обнаружения в качестве примера способа обнаружения препятствия .
Фиг.3B является схемой для описания второй схемы обнаружения в качестве примера способа обнаружения препятствия.
Фиг.4А - схема для описания операции в первом режиме восстановления в качестве примера операции в режиме восстановления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг.4B - схема для описания операции во втором режиме восстановления в качестве примера операции в режиме восстановления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг.4C - схема для описания операции в третьем режиме восстановления в качестве примера операции в режиме восстановления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг.5 - блок-схема последовательности операций, иллюстрирующая пример процедуры управления, выполняемой системой управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг.6 - блок-схема последовательности операций, иллюстрирующая пример процедуры управления в режиме восстановления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг.7 - схема для описания операции в четвертом режиме восстановления в качестве примера операции в режиме восстановления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг.8А - схема для описания операции в пятом режиме восстановления в качестве примера операции в режиме восстановления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг. 8B - схема для описания примера операции в режиме восстановления в соответствии со сравнительным примером.
[ВАРИАНТ(Ы) ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ]
[0009]
Далее один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
В вариантах осуществления настоящее изобретение будет описано посредством примера случая, в котором аппаратура управления парковкой согласно настоящему изобретению применяется к системе управления парковкой. Один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на конфигурацию, в которой аппаратура управления парковкой оборудована в транспортном средстве, но аппаратура управления парковкой также может быть применена к портативному операционному терминалу (оборудованию, такому как смартфон или PDA: Персональный цифровой помощник), способному обмениваться информацией с бортовой аппаратурой. Способ управления парковкой согласно настоящему изобретению можно использовать в аппаратуре управления парковкой, которая будет описана ниже.
[0010]
На фиг.1 показана блок-схема системы 1000 управления парковкой, включающей в себя аппаратуру 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя набор камер 1, одно или несколько дальномерных устройств 2, информационный сервер 3, операционный терминал 5, аппаратуру 100 управления парковкой и бортовую аппаратуру 200. Бортовая аппаратура 200 включает в себя контроллер 70 транспортного средства, систему 40 привода, датчик 50 угла руления и датчик 60 скорости транспортного средства. Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет операцией передвижения (парковки) транспортного средства в качестве цели управления в парковочное пространство на основе рабочей команды, которая вводится из операционного терминала 5.
[0011]
Набор камер 1 включает в себя, например, камеры 1a-1d, как показано. Камеры 1a-1d установлены в передней части, правосторонней части, левосторонней части и задней части транспортного средства соответственно. Например, камера 1a, которая установлена на или около переднего бампера транспортного средства, захватывает изображение перед транспортным средством и выводит информацию изображения на аппаратуру 100 управления парковкой. Камера 1b, которая установлена на правой стороне транспортного средства (например, на правой стороне переднего конца транспортного средства), захватывает изображение на правой стороне транспортного средства и выводит информацию изображения в аппаратуру 100 управления парковкой. Камера 1с, которая установлена на левой стороне транспортного средства (например, на левой стороне переднего конца транспортного средства), захватывает изображение на левой стороне транспортного средства и выводит информацию изображения в аппаратуру 100 управления парковкой. Камера 1d, которая установлена на заднем бампере транспортного средства или рядом с ним, захватывает изображение позади транспортного средства и выводит информацию изображения на аппаратуру 100 управления парковкой.
[0012]
Одно или несколько дальномерных устройств 2 измеряют расстояние от транспортного средства до объекта, существующего вокруг транспортного средства. Примеры дальномерных устройств 2 включают в себя радиолокационные устройства, такие как радиолокационное устройство миллиметрового диапазона, лазерное радиолокационное устройство и ультразвуковое радиолокационное устройство, и гидролокаторы. Количество дальномерных устройств 2 конкретно не ограничено, и дальномерные устройства 2, таким образом, могут быть двумя или более дальномерными устройствами 2. Дальномерные устройства 2 могут быть установлены в тех же позициях, что и камеры 1a-1d набора камер 1, или также могут быть установлены в разных позициях. Объекты, существующие вокруг транспортного средства, включают в себя препятствия, пешеходов и другие транспортные средства. Дальномерные устройства 2 обнаруживают не только расстояние до объекта, но также наличие или отсутствие объекта и позицию объекта относительно транспортного средства. Дальномерные устройства 2 обнаруживают наличие или отсутствие объекта, расстояние до объекта и позицию объекта и выводят результаты обнаружения в аппаратуру 100 управления парковкой.
[0013]
Информационный сервер 3 является аппаратурой предоставления информации, предоставленной в сети, способной к связи. Информационный сервер включает в себя устройство 131 связи и запоминающее устройство 132. Запоминающее устройство 132 включает в себя считываемую информацию 133 карты и информацию 134 парковочного места. Информация 133 карты включает в себя позиционную информацию парковочных объектов. Информация 134 парковочного места включает в себя, для каждого парковочного объекта, местоположение и идентификационный номер каждого парковочного места и позиционную информацию проходов, столбов, стен, мест для хранения и т.д. в парковочном объекте. Информация 134 парковочного места дополнительно включает в себя направление движения транспортных средств в проходе парковочного объекта. Информация 134 парковочного места не ограничивается вышеприведенной информацией и может включать в себя, для каждого парковочного объекта, информацию о доступных парковочных пространствах в качестве информации о парковочных местах, на которых можно парковать транспортное средство. Аппаратура 100 управления парковкой и операционный терминал 5 могут осуществлять доступ к запоминающему устройству 132 информационного сервера 3 для получения различных информационных элементов.
[0014]
Операционный терминал 5 представляет собой портативный компьютер, который может быть выведен наружу из транспортного средства и имеет функцию ввода и функцию связи. Операционный терминал 5 принимает ввод рабочей команды, сделанной оператором для управления вождением (работой) транспортного средства для парковки. Вождение включает в себя операции для парковки (операции для въезда на парковочное пространство и выезда из парковочного пространства). Оператор вводит инструкции через операционный терминал 5. Инструкции включают в себя рабочую команду для выполнения парковки. Рабочая команда включает в себя информацию о выполнении/остановке управления парковкой, выборе/изменении целевой позиции парковки и выборе/изменении маршрута парковки и другую информацию, необходимую для парковки. Оператор также может заставить аппаратуру 100 управления парковкой распознавать инструкции, включающие в себя рабочую команду, без использования операционного терминала 5, например, жестом оператора (то есть оператор может вводить такие инструкции в аппаратуру 100 управления парковкой без использования операционного терминала 5 (например, жестом).
[0015]
Операционный терминал 5 включает в себя устройство связи и способен обмениваться информацией с аппаратурой 100 управления парковкой и информационным сервером 3. Операционный терминал 5 передает рабочую команду, которая вводится вне транспортного средства, в аппаратуру 100 управления парковкой через сеть связи и вводит рабочую команду в аппаратуру 100 управления парковкой. Операционный терминал 5 осуществляет связь с аппаратурой 100 управления парковкой, используя сигналы, включающие в себя уникальный идентификационный код. Операционный терминал 5 включает в себя дисплей 53. Дисплей 53 представляет интерфейс ввода и различные информационные элементы. Когда дисплей 53 является дисплеем типа панели касания, он имеет функцию приема рабочей команды. Операционный терминал 5 может быть портативным оборудованием, таким как смартфон или КПК: Персональный цифровой помощник, в котором установлены приложения для приема ввода рабочей команды, используемой в способе управления парковкой, в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, и передачи рабочей команды на аппаратуру 100 управления парковкой.
[0016]
Контроллер 70 транспортного средства является контроллером, который управляет вождением транспортного средства. Примеры контроллера 70 транспортного средства включают в себя компьютер и электронный блок управления (ECU). Контроллер 70 транспортного средства включает в себя ПЗУ 72, в котором хранится программа управления вождением транспортного средства, ЦП 71 в качестве рабочей схемы, которая выполняет программу, хранящуюся в ПЗУ 72, для использования в качестве устройства управления вождением, и ОЗУ 73, которое служит в качестве доступного запоминающего устройства. Целевой угол руления и целевая скорость транспортного средства вводятся из аппаратуры 100 управления парковкой в контроллер 70 транспортного средства, а значение обнаружения из датчика 50 угла руления и значение обнаружения из датчика 60 скорости транспортного средства вводятся в контроллер 70 транспортного средства. При выполнении управления парковкой транспортного средства контроллер 70 транспортного средства управляет работой системы 40 привода на основе целевого угла поворота рулевого колеса и целевой скорости, которые вводятся в аппаратуру 100 управления парковкой. Контроллер 70 транспортного средства выводит значение обнаружения из датчика 50 угла руления и значение обнаружения из датчика 60 скорости транспортного средства в аппаратуру 100 управления парковкой. Целевой угол руления и целевая скорость транспортного средства, которые вводятся из аппаратуры 100 управления парковкой, будут описаны позже.
[0017]
Система 40 привода приводит в движение транспортное средство для передвижения (перемещения) из текущей позиции в целевую позицию парковки путем вождения на основе сигнала команды управления, полученного от аппаратуры 100 управления парковкой через контроллер 70 транспортного средства. Устройство руления (не показано) в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой механизм привода, который передвигает транспортное средство в правом или левом направлении. Система 40 привода включает в себя электродвигатель EPS. Электродвигатель EPS получает сигнал команды управления от аппаратуры 100 управления парковкой через контроллер 70 транспортного средства. Затем электродвигатель EPS управляет величиной руления, приводя в действие механизм рулевого управления с усилителем, включенный в рулевое управление устройства руления, на основе полученного сигнала команды управления и управляет работой при передвижении транспортного средства в целевую позицию парковки. Контент управления и рабочая схема для парковки транспортного средства конкретно не ограничены, и схемы, известные на момент подачи настоящей заявки, могут быть соответствующим образом применены.
[0018]
Датчик 50 угла руления, который установлен внутри рулевой колонки, например, обнаруживает угол поворота рулевого колеса и выводит обнаруженное значение в аппаратуру 100 управления парковкой через контроллер 70 транспортного средства. Датчик 60 скорости транспортного средства вычисляет скорость транспортного средства для транспортного средства из скорости вращения колес, обнаруженной датчиком на стороне колеса (не показан), который обнаруживает скорость вращения колеса, и выводит обнаруженное значение в аппаратуру 100 управления парковкой через контроллер 70 транспортного средства.
[0019]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты аппаратуры 100 управления парковкой соединены друг с другом через локальную сеть контроллера (CAN) или другую бортовую локальную сеть для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает рабочую команду, переданную от внешнего операционного терминала 5, и вводит принятую рабочую команду в устройство 20 ввода. Субъектом, который вводит рабочую команду на внешний операционный терминал 5, может быть человек (пользователь, пассажир, водитель или работник парковочного объекта). Устройство 20 ввода передает принятую рабочую команду на устройство 10 управления. Устройство 30 вывода включает в себя дисплей 31. Когда пассажир (водитель или пассажир) присутствует в транспортном средстве, устройство 30 вывода может уведомить пассажира в транспортном средстве об информации управления парковкой через дисплей 31. Дополнительно или альтернативно, устройство 30 вывода может передавать информацию управления парковкой на операционный терминал 5 и уведомлять оператора, несущего операционный терминал 5, о информации управления парковкой через дисплей 53 операционного терминала 5. Дисплей 31 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой дисплей типа сенсорной панели, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит в качестве устройства 20 ввода. Даже когда транспортное средство управляется на основе рабочей команды, которая вводится с операционного терминала 5, пассажир (водитель или пассажир) может вводить рабочую команду, такую как команда для аварийной остановки, через устройство 20 ввода.
[0020]
Устройство 10 управления аппаратуры 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой компьютер для управления парковкой, включающий в себя ПЗУ 12, в котором хранится программа управления парковкой, ЦП 11 в качестве рабочей схемы, которая исполняет сохраненную в ПЗУ 12 программу для того, чтобы служить в качестве аппаратуры 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и ОЗУ 13, которое служит в качестве доступного запоминающего устройства.
[0021]
Программа управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения является программой для выполнения управления парковкой при передвижении транспортного средства в целевую позицию парковки на основе рабочей команды, переданной от внешнего операционного терминала 5. Аппаратура 100 управления парковкой выводит целевую скорость и целевой угол руления транспортного средства, которые рассчитываются программой, в контроллер 70 транспортного средства. Контроллер 70 транспортного средства эксплуатирует системы 40 привода в соответствии с целевой скоростью и целевым углом руления, и тем самым транспортное средство может передвигаться по маршруту парковки с соответствующей скоростью, чтобы парковаться в целевой позиции парковки.
[0022]
Дополнительно или альтернативно, программа управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения является программой для передвижения транспортного средства в направлении, в котором транспортное средство покидает целевую позицию парковки, когда транспортное средство не может быть припарковано в целевой позиции парковки по некоторой причине при передвижении для парковки в целевом положении парковки. Например, когда набор камер 1 и т.п. обнаруживает препятствие на или около маршрута парковки, аппаратура 100 управления парковкой приостанавливает управление парковкой. Затем, чтобы позволить оператору выбрать, должно ли управление транспортного средства переходить из управления парковкой в режим восстановления, аппаратура 100 управления парковкой передает операционному терминалу 5 информацию о том, что управление парковкой будет приостановлено, и информацию, с которой оператор может выбрать режим восстановления.
[0023]
Режим восстановления относится к так называемому режиму возврата, в котором, когда транспортное средство находится в ситуации, когда транспортное средство не может быть припарковано в целевой позиции парковки во время выполнения управления парковкой в целевую позицию парковки, управление парковкой приостанавливается и транспортное средство передвигается в заданную позицию, отделенную от целевой позиции парковки. Конкретная обработка после перехода в режим восстановления будет описана позже. В вышеописанном примере, когда оператор касается кнопки на экране для выполнения режима восстановления, отображаемого на экране дисплея 53 операционного терминала 5, информация рабочей команды для выполнения режима восстановления вводится как рабочая команда для выполнение режима восстановления для аппаратуры 100 управления парковкой через сеть связи, и программа режима восстановления выполняется.
[0024]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой аппаратуру типа дистанционного управления, которая принимает рабочую команду извне и управляет передвижением транспортного средства для парковки транспортного средства в заданное парковочное пространство. Пассажиры транспортного средства могут находиться за пределами салона транспортного средства или также могут находиться внутри салона транспортного средства.
[0025]
Устройство 10 управления аппаратуры 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения имеет функции выполнения процесса установки целевой парковочной рамки, процесса установки начальной позиции парковки, процесса оценки текущей позиции, процесса обнаружения позиции оператора, и процесс генерации маршрута парковки как функции выполнения вышеописанного управления парковкой. Кроме того, устройство 10 управления имеет функции выполнения процесса обнаружения препятствий, процесса замедления, процесса вычисления следующего направления парковки и процесса генерации маршрута восстановления в качестве функций выполнения вышеописанного режима восстановления. Устройство 10 управления дополнительно имеет функции выполнения процесса следования по маршруту и процесса генерирования целевой скорости для передвижения транспортного средства по маршруту парковки, сгенерированному процессом генерации маршрута парковки, или по маршруту восстановления, сгенерированному процессом генерации маршрута восстановления. Маршрут восстановления будет описан позже. Каждый из вышеупомянутых процессов выполняется взаимодействием программного обеспечения для реализации процесса и вышеописанного аппаратного обеспечения. Эти процессы будут описаны ниже.
[0026]
Сначала будут описаны функции выполнения управления парковкой. Будет описан процесс установки целевой парковочной рамки. Устройство 10 управления устанавливает парковочную рамку для парковки транспортного средства посредством автоматического (автономного) вождения (в дальнейшем называемую целевой парковочной рамкой). Устройство 10 управления обнаруживает парковочные рамки на парковочном месте по изображениям, захваченным набором камер 1. Например, устройство 10 управления генерирует изображение вида сверху, из изображений, захваченных набором камер 1, и обнаруживает кандидаты линии рамки, которые составляют каждую парковочную рамку, из изображения вида сверху. Затем устройство 10 управления определяет, удовлетворяют или нет обнаруженные кандидаты линии рамки условиям определения для интервала с другой линией рамки, относительного угла к другой линии рамки, длины и т. д., и обнаруживает пространства, определенные кандидатами линии рамки, удовлетворяющие вышеупомянутым условиям определения в качестве парковочных рамок. Настоящее изобретение не ограничивается генерацией изображения вида сверху, из изображений, захваченных набором камер 1, для обнаружения парковочных рамок из изображения вида сверху, и информация о парковочных рамках может быть получена, например, посредством связи с внешним окружением транспортного средства, то есть так называемой связи между дорогой и транспортным средством или связи между транспортным средством и транспортным средством.
[0027]
Здесь, автоматизированное (автономное) вождение относится к вождению, при котором аппаратура 100 управления парковкой, а не водитель, выполняет операцию руления устройства руления, операцию акселератора и работу тормоза автоматически (автономно) посредством контроллера 70 транспортного средства. Аппаратура 100 управления парковкой не ограничивается типом выполнения всех операций для управления вождением транспортного средства в автоматическом (автономном) режиме и также может быть полуавтоматического (полуавтономного) типа, в котором операция руления выполняется автоматическим (автономным) способом, когда водитель выполняет операцию акселератора/тормоза. В последнем случае, например, водитель садится в транспортное средство и выполняет операцию нажатия акселератора/тормоза, а пассажир транспортного средства, отличный от водителя или работника парковочного объекта, управляет операционным терминалом 5.
[0028]
Затем устройство 10 управления обнаруживает пространства, в которых возможна парковка (далее в тексте обозначаются как доступные парковочные пространства), из обнаруженных парковочных рамок. Например, на основе информации о дальности (информации о точках отражения) от дальномерных устройств 2, устройство 10 управления определяет, присутствует ли препятствие в обнаруженных парковочных рамках или маршрутах при парковке в парковочные рамки. Затем устройство 10 управления обнаруживает парковочные рамки без препятствий в качестве доступных парковочных пространств. Настоящее изобретение не ограничивается обнаружением доступных парковочных пространств на основе информации о дальности от дальномерных устройств 2, и доступные парковочные пространства также могут быть обнаружены, например, по изображениям, захваченным набором камер 1 или камерой, установленной на парковочном месте. Дополнительно или альтернативно, информация о доступных парковочных пространствах может быть получена, например, из информации 134 парковочного места посредством доступа к информационному серверу 3.
[0029]
Затем устройство 10 управления обнаруживает парковочное пространство, рекомендованное для водителя и пассажиров рассматриваемого транспортного средства (далее называемое рекомендуемым парковочным пространством), из доступных парковочных пространств и представляет рекомендуемое парковочное пространство водителю и пассажирам рассматриваемого транспортного средства. Например, устройство 10 управления передает информацию о рекомендуемом парковочном пространстве на операционный терминал 5 и управляет дисплеем 53 операционного терминала 5, чтобы отображать информацию о рекомендованном парковочном пространстве. Дополнительно или альтернативно, устройство 10 управления управляет дисплеем 31 устройства 30 вывода, чтобы отображать информацию о рекомендуемом парковочном пространстве. Когда имеется два или более доступных парковочных пространства, как указано выше, устройство 10 управления определяет доступное парковочное пространство, для которого требуемое время при парковке в доступное парковочное пространство является самым коротким, например, как рекомендуемое парковочное пространство. Дополнительно или альтернативно, например, устройство 10 управления определяет доступное парковочное пространство, ближайшее к точке обзора водителя рассматриваемого транспортного средства, в качестве рекомендуемого парковочного пространства.
[0030]
Затем устройство 10 управления принимает обозначение целевой парковочной рамки, сделанное водителем или пассажиром рассматриваемого транспортного средства, и устанавливает целевую позицию парковки, в которой припарковано транспортное средство. Водитель или пассажир рассматриваемого транспортного средства может назначить целевую парковочную рамку, например, прикоснувшись к значку рекомендованного парковочного пространства, отображаемого на дисплее 53 типа панели касания операционного терминала 5, или передвинув курсор на дисплее к значку рекомендуемого пространства с помощью клавиши управления курсором, отображаемой на дисплее 53, и нажатия кнопки ввода. Обозначение целевой парковочной рамки не ограничивается тем, чтобы быть назначенным человеком, и сторона парковочного объекта может автоматически обозначать целевую парковочную рамку. Например, дисплей 53 операционного терминала 5 может быть сконфигурирован для отображения одного рекомендованного парковочного пространства, которое обозначено на стороне парковочного объекта, и водитель или пассажир рассматриваемого транспортного средства может обозначать рекомендованное парковочное пространство. Устройство 10 управления выполняет такой процесс, чтобы установить целевую позицию парковки в качестве позиции, в которой припарковано транспортное средство.
[0031]
Далее будет описан процесс установки начальной позиции парковки. Чтобы вычислить маршрут парковки, который будет описан позже, устройство 10 управления устанавливает позицию, в которой начинается управление парковкой (далее именуемую как начальная позиция парковки). Например, когда пользователь приводит в оперирует пусковым переключателем, предусмотренным на операционном терминале 5, для запуска управления парковкой, текущая позиция транспортного средства в это время устанавливается в качестве начальной позиции парковки. Способ указания текущей позиции конкретно не ограничен. Например, устройство 10 управления может обращаться к информационному серверу 3 через антенны 211 для вычисления текущей позиции из информации 133 карты или может использовать систему глобального позиционирования (GPS) для измерения текущей позиции транспортного средства.
[0032]
Далее будет описан процесс оценки текущей позиции. Чтобы передвигать транспортное средство вдоль маршрута парковки или маршрута восстановления, который будет описан позже, устройство 10 управления оценивает текущую позицию транспортного средства. Например, устройство 10 управления измеряет текущую позицию транспортного средства с использованием GPS, получает текущую позицию посредством связи между дорогой и транспортным средством или вычисляет текущую позицию на основе величины руления упомянутой величины операции руления и акселератора.
[0033]
Процесс обнаружения позиции оператора будет описан ниже со ссылкой на фиг. с 2А по фиг. 2D. Устройство 10 управления обнаруживает позицию оператора, несущего операционный терминал 5. Позиция оператора используется для генерации маршрута парковки или маршрута восстановления. Позиция оператора включает в себя информацию о позиции на плоскости передвижения транспортного средства и информацию о положении по высоте. Например, устройство 10 управления обнаруживает позицию операционного терминала 5, переносимого оператором, и вычисляет позицию оператора на основе позиции операционного терминала 5. Операционный терминал 5 может быть предоставлен в заранее определенной позиции или также может переноситься оператором. Когда операционный терминал 5 предоставляется в заранее определенной позиции, оператор передвигается в позицию, в которой предоставляется операционный терминал 5, и использует операционный терминал 5 в этой позиции. В этих случаях устройство 10 управления может определять позицию операционного терминала 5 как позицию оператора.
[0034]
На фиг.2А показана схема, предназначенная для описания обнаружения позиции оператора М на основе результатов обнаружения с помощью множественных дальномерных устройств 2, предусмотренных в транспортном средстве V, и/или изображений, захваченных с помощью набора камер 1. Устройство 10 управления обнаруживает позицию оператора М на основе изображений, захваченных камерами 1a-1d. Дополнительно или альтернативно, устройство 10 управления обнаруживает двумерную позицию и/или трехмерную позицию оператора M на основе результатов обнаружения от дальномерных устройств 2.
[0035]
Фиг. 2B является схемой для описания обнаружения позиции операционного терминала 5 или позиции оператора M, несущего операционный терминал 5, на основе радиоволн связи между множественными антеннами 211, предусмотренными в разных позициях транспортного средства V, и операционным терминалом 5. Когда множественные антенны 211 обмениваются данными с одним операционным терминалом 5, интенсивность принимаемой радиоволны каждой антенны 211 отличается. Устройство 10 управления вычисляет позицию операционного терминала 5 на основе разности интенсивности между принятыми радиоволнами антенн 211. Дополнительно или в качестве альтернативы, устройство 10 управления вычисляет двумерную позицию и/или трехмерную позицию операционного терминала 5 или оператора M по разности интенсивности между принятыми радиоволнами антенн 211.
[0036]
На фиг.2С показана схема, описывающая предварительно обозначенную заранее определенную позицию (направление/расстояние: D1, D2) относительно сиденья DS водителя транспортного средства в качестве рабочей позиции оператора М или в качестве позиции, в которой установлен операционный терминал 5. Например, когда оператор M временно останавливает транспортное средство V в обозначенной позиции и покидает транспортное средство V, чтобы оперировать операционным терминалом 5, предусмотренным в предварительно определенной позиции, устройство 10 управления вычисляет начальную позицию оператора M относительно транспортного средства V или начальную позицию терминала 5, который переносится оператором М, относительно транспортного средства V.
[0037]
Фиг. 2D является схемой для описания отображения информации изображения, представляющей вычисленную рабочую позицию (позицию, в которой оператор М стоит: рабочая позиция) на дисплее 53 операционного терминала 5. При обнаружении позиции оператора устройство 10 управления управляет дисплеем 53 операционного терминала 5, чтобы отображать изображение, как показано на фиг. 2D. Это управление отображением может выполняться приложением, установленным на стороне операционного терминала 5, или также может выполняться на основе команды от устройства 10 управления.
[0038]
Далее будет описан процесс генерации маршрута парковки. Устройство 10 управления генерирует маршрут от начальной позиции парковки к целевой позиции парковки (далее называемый маршрутом парковки) в качестве маршрута для парковки транспортного средства в целевой парковочной рамке. Форма маршрута парковки конкретно не ограничена, и маршрут парковки может представлять собой прямой маршрут, изогнутый маршрут или маршрут их комбинации. Когда транспортное средство поворачивает для парковки до достижения целевой позиции парковки, маршрут парковки включает в себя маршрут от начальной позиции парковки до позиции поворота для парковки и маршрут от позиции поворота для парковки до целевой позиции парковки. Например, устройство 10 управления в качестве маршрута парковки вычисляет маршрут, полученный путем комбинирования изогнутого маршрута от начальной позиции парковки до позиции поворота для парковки и прямого маршрута от позиции поворота для парковки до целевой позиции парковки. Настоящее изобретение не ограничивается вычислением маршрута парковки, и маршрут парковки, определенный для каждой парковочной рамки, может быть предварительно сохранен, например, в памяти (например, в ПЗУ 12), и устройство 10 управления может считывать маршрут парковки из памяти. Дополнительно или в качестве альтернативы, например, устройство 10 управления может получать информацию о заранее определенном маршруте парковки посредством связи между транспортным средством и дорогой или связи между транспортным средством и транспортным средством для генерации маршрута парковки. Дополнительно или в качестве альтернативы, маршрут парковки может быть сгенерирован посредством установки позиции на полпути между начальной позицией парковки и целевой позицией парковки, генерирования маршрута парковки от начальной позиции парковки до позиции на полпути и генерирования маршрута парковки от позиции на полпути до целевой позиции парковки при приближении к позиции на полпути. Дополнительно или альтернативно, когда окружающая ситуация изменяется или когда позиция транспортного средства отклоняется от маршрута парковки, маршрут парковки может быть сгенерирован снова и изменен во время управления.
[0039]
Далее будет описана функция выполнения режима восстановления. Процесс обнаружения препятствий будет описан со ссылкой на фиг. 3А и 3В. Устройство 10 управления обнаруживает препятствия, существующие за пределами транспортного средства. К препятствиям относятся такие конструкции, как стены и столбы парковки, объекты для установки вокруг транспортного средства, пешеходы, другие транспортные средства, припаркованные транспортные средства и другие подобные объекты.
[0040]
Фиг. 3A является схемой для описания обнаружения препятствия OB, существующего вокруг транспортного средства V. Как показано на фиг. 3A, устройство 10 управления обнаруживает препятствие OB на основе результатов обнаружения от множественных дальномерных устройств 2, предусмотренных в транспортном средстве, и/или изображений, захваченных набором камер 1. Результаты обнаружения с помощью дальномерных устройств 2 включают в себя наличие или отсутствие препятствия OB, позицию препятствия OB, размер препятствия OB и расстояние до препятствия OB. Дополнительно или в качестве альтернативы, устройство 10 управления выполняет обработку изображений для изображений, захваченных камерами 1a-1d, таким образом, чтобы обнаружить наличие или отсутствие препятствия OB, позицию препятствия OB, размер препятствия OB и расстояние до препятствия OB. Обнаружение препятствия не ограничивается использованием вышеописанного способа и может выполняться, например, с использованием стереофонической техники передвижения с камерами 1a-1d.
[0041]
Фиг. 3B - схема для описания способа обнаружения препятствий, включающих в себя такие конструкции, как стены и столбы парковочного места. Как показано на фиг. 3B, устройство 10 управления обращается к запоминающему устройству 132 информационного сервера 3 для получения информации 134 парковочного места. Информация 134 парковочного места включает в себя информацию о конструкциях, таких как стены и столбы парковочного места, и поэтому устройство 10 управления обнаруживает препятствия, включающие в себя конструкции, на основе информации 134 парковочного места. На фиг.3B конкретная карта MP этажа почасового парковочного места ST проиллюстрирована как информация 134 парковочного места, и на карте MP этажа позиция каждого парковочного места PL представлена, например, координатой X и координатой Y.
[0042]
В одном или нескольких вариантах осуществления настоящего изобретения результат обнаружения с помощью процесса обнаружения препятствий используется в качестве триггера для перехода от управления парковкой к режиму восстановления, но настоящее изобретение этим не ограничивается. Устройство 10 управления может непрерывно получать результат обнаружения препятствия и использовать результат обнаружения для других процессов. Например, устройство 10 управления может использовать результат обнаружения препятствия в ходе установки целевой позиции парковки, может использовать результат обнаружения препятствия в ходе вычисления маршрута парковки, может использовать результат обнаружения препятствия в ходе установки следующей целевой позиции парковки и следующего направления парковки, которое будет описано позже, или может использовать результат обнаружения препятствия в ходе генерации маршрута восстановления, который будет описан позже.
[0043]
Далее будет описан процесс замедления. При обнаружении препятствия, когда транспортное средство движется по маршруту парковки к целевой позиции парковки, устройство 10 управления принудительно замедляет транспортное средство, чтобы сделать остановку, чтобы предотвратить контактирование транспортного средства с препятствием. Например, даже когда целевая скорость умеренно уменьшается, когда транспортное средство приближается к целевой позиции парковки при управлении парковкой, устройство 10 управления увеличивает степень замедления и принудительно управляет транспортным средством, чтобы сделать остановку. Также, когда маршрут парковки включает в себя позицию поворота для парковки и обнаруживается препятствие, когда транспортное средство движется в направлении позиции поворота для парковки, устройство 10 управления управляет транспортным средством, чтобы сделать остановку.
[0044]
Далее будет описан следующий процесс вычисления направления парковки. Когда управление парковкой до целевой позиции парковки приостановлено из-за обнаружения препятствия, устройство 10 управления задает направление парковки, когда транспортное средство припарковано в следующей целевой позиции парковки. Сначала устройство 10 управления устанавливает следующую целевую позицию парковки. Следующая целевая позиция парковки может быть целевой позицией парковки доступного парковочного пространства, которое уже обнаружено как одно из доступных парковочных пространств в процессе установки целевой парковочной рамки, или может также быть другой целевой позицией парковки, которая произвольно обозначена оператором. Например, дисплей 53 операционного терминала 5 может быть сконфигурирован для отображения окружающего изображения, и водитель или пассажир рассматриваемого транспортного средства может обозначить целевую позицию парковки в произвольной позиции.
[0045]
Например, устройство 10 управления устанавливает следующую целевую позицию парковки со ссылкой на результат выполнения процесса установки целевой парковочной рамки. Когда два или более доступных парковочных пространства обнаружены в ходе процесса установки целевой парковочной рамки, устройство 10 управления выбирает следующее доступное парковочное пространство из доступных парковочных пространств, которые не были выбраны в качестве рекомендуемого парковочного пространства. Затем устройство 10 управления устанавливает следующую целевую позицию парковки на основе следующего доступного парковочного пространства. Когда есть два или более доступных парковочных пространства, как упомянуто выше, устройство 10 управления устанавливает ближайшее доступное парковочное пространство от текущей позиции остановленного транспортного средства, например, в качестве следующего доступного парковочного пространства. Дополнительно или в качестве альтернативы, например, контроллер 10 учитывает не только текущую позицию, но также и направление транспортного средства, чтобы устанавливать доступное парковочное пространство с наименьшим требуемым временем при парковке, в качестве следующего доступного парковочного пространства. Следующее доступное парковочное пространство устанавливается на основе такого критерия, чтобы тем самым предотвратить установку доступного парковочного пространства в углу парковочного места, в которое, как говорят, относительно трудно парковаться, или в позиции, в которой транспортное средство не может быть припарковано с текущей позиции.
[0046]
Затем устройство 10 управления вычисляет следующее направление парковки для транспортного средства на основе установленной следующей целевой позиции парковки. Устройство 10 управления задает следующее направление парковки на основе целевой позиции парковки, следующей целевой позиции парковки, текущей позиции транспортного средства и направления транспортного средства.
[0047]
Например, устройство 10 управления задает следующее направление парковки на основе маршрута парковки до следующей целевой позиции парковки. Устройство 10 управления генерирует маршрут парковки в установленную следующую целевую позицию парковки (далее именуемую следующим маршрутом парковки) и задает направление вдоль следующего маршрута парковки в качестве следующего направления парковки. Когда следующий маршрут парковки включает в себя позицию поворота для парковки, устройство 10 управления задает в качестве следующего направления парковки направление от позиции поворота для парковки до следующей целевой позиции парковки на следующем маршруте парковки. Следующее направление парковки включает в себя прямое направление и обратное направление, которые являются направлениями перемещения на следующем маршруте парковки.
[0048]
Дополнительно или альтернативно, например, устройство 10 управления задает следующее направление парковки на основе взаимосвязи между целевой позицией парковки и следующей целевой позицией парковки. Когда следующая целевая позиция парковки расположена на противоположной стороне от целевой позиции парковки через проход, устройство 10 управления учитывает направление транспортного средства и задает следующее целевое направление парковки от направления к следующей целевой позиции парковки от упомянутой целевой позиции парковки. Например, когда транспортное средство делает остановку в направлении вперед относительно следующей целевой позиции парковки, устройство 10 управления определяет, что легко парковаться вперед в следующей целевой позиции парковки, и задает направление вперед в направлении вдоль следующего маршрута парковки в качестве следующего направления парковки. В вышеупомянутом случае, когда транспортное средство останавливается в обратном направлении относительно следующей целевой позиции парковки, устройство 10 управления определяет, что легко парковаться назад в следующей целевой позиции парковки, и задает обратное направление в направлении вдоль следующего маршрута парковки в качестве следующего направления парковки.
[0049]
Дополнительно или в качестве альтернативы, например, устройство 10 управления учитывает форму парковочной рамки, соответствующей целевой позиции парковки, и форму парковочной рамки, соответствующей следующей целевой позиции парковки, и/или взаимосвязь расположения с другими парковочными рамками и тем самым определяет направление парковки с высокой степенью точности. Например, предполагается, что все парковочные рамки имеют прямоугольную форму. Предполагается также, что целевая позиция парковки находится на одном парковочном месте из множества парковочных мест, на которых парковочные места скомпонованы так, что длинная сторона парковочной рамки является смежной с длинной стороной другой парковочной рамки, в то время как следующая целевая позиция парковки находится на одном парковочном месте из множества парковочных мест, на которых парковочные места скомпонованы так, что короткая сторона парковочной рамки является смежной с короткой стороной другой парковочной рамки. В этом случае на основе взаимосвязи между целевой позицией парковки и другими парковочными местами с обеих сторон целевой позиции парковки устройство 10 управления определяет, что транспортное средство должно быть припарковано в прямом или обратном направлении на целевую позицию парковки, в то время как транспортное средство должно быть припарковано способом параллельной парковки на следующей позиции парковки. Затем устройство 10 управления задает направление вдоль следующего маршрута парковки для параллельной парковки в качестве следующего направления парковки.
[0050]
Далее будет описан процесс генерации маршрута восстановления. Под маршрутом восстановления понимается маршрут, по которому транспортное средство покидает целевую позицию парковки при переходе в режим восстановления. На основе следующего направления парковки устройство 10 управления генерирует маршрут эвакуации (далее называемый маршрутом восстановления) в качестве маршрута для передвижения транспортного средства от позиции, в которой транспортное средство останавливается, к целевой позиции (именуемой в дальнейшем позицией восстановления), к которой движется транспортное средство. Например, когда следующим направлением парковки является направление вперед, сначала устройство 10 управления устанавливает позицию восстановления в позицию, из которой транспортное средство может быть припарковано, в следующую целевую позицию парковки в направлении вперед. Затем устройство 10 управления генерирует маршрут, соединяющий текущую позицию и позицию восстановления, так что транспортное средство может безопасно передвигаться в позицию восстановления. Форма маршрута восстановления конкретно не ограничена, и маршрут восстановления может представлять собой прямой маршрут, изогнутый маршрут или маршрут их комбинации. Устройство 10 управления учитывает результат обнаружения препятствия и позиционную информацию оператора, чтобы генерировать маршрут восстановления, который позволяет транспортному средству безопасно передвигаться в позицию восстановления.
[0051]
Дополнительно или в качестве альтернативы, в одном или нескольких вариантах осуществления настоящего изобретения устройство 10 управления устанавливает в качестве позиции восстановления позицию, из которой возможно управление парковкой до следующего целевой позиции парковки. Например, устройство 10 управления генерирует следующий маршрут парковки в установленную следующую целевую позицию парковки и устанавливает позицию восстановления на следующем маршруте парковки. Посредством этой операции позиция для транспортного средства, чтобы покинуть целевую позицию парковки, является не просто позицией, отделенной от целевой позиции, но позицией, из которой может быть начато управление парковкой до следующей целевой позиции парковки. В результате управление следующей парковкой может выполняться беспроблемно.
[0052]
Далее будут описаны процесс следования по маршруту и процесс генерации целевой скорости, которые являются процессами для передвижения транспортного средства вдоль маршрута парковки или маршрута восстановления. После генерирования маршрута парковки или маршрута восстановления устройство 10 управления вычисляет целевой угол руления и целевую скорость, чтобы передвигать транспортное средство по любому из этих маршрутов. Устройство 10 управления выводит вычисленный целевой угол руления и целевую скорость на контроллер 70 транспортного средства. Когда во время выполнения управления парковкой обнаружено препятствие, устройство 10 управления принудительно снижает целевую скорость с помощью процесса замедления. Способы вычисления целевого угла руления и целевой скорости конкретно не ограничены, и схемы, известные на момент подачи настоящей заявки, могут быть соответствующим образом применены.
[0053]
Примеры работы в режиме восстановления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения будут описаны со ссылкой на фиг. 4А-4С. На фиг.4А-4С представлены схемы, каждая из которых иллюстрирует пример работы в режиме восстановления. Фиг. 4A-4C иллюстрируют сцены, в которых препятствие OB обнаруживается, когда аппаратура 100 управления парковкой выполняет управление парковкой для парковки транспортного средства V назад на парковочное место PL1. В этих сценах устройство 10 управления определяет, что транспортное средство V не может быть припарковано на парковочном месте PL1, и управляет дисплеем 53 операционного терминала 5, чтобы представить информацию, которая обеспечивает переход в режим восстановления, чтобы позволить оператору операционного терминала 5 выбирать, переходить ли в режим восстановления или нет. Предполагается, что оператор выбирает режим восстановления и нажимает кнопку ввода рабочего терминала 5.
[0054]
На Фиг. 4A-4C, парковочное место PL1 представляет целевую позицию парковки, в то время как парковочное место PL2 представляет следующую целевую позицию парковки. Примеры способа задания следующей целевой позиции парковки включают в себя способ, аналогичный способу установки целевой позиции парковки. В частности, во-первых, устройство 10 управления обнаруживает доступные парковочные пространства по изображениям, захваченным набором камер 1 или камерой, установленной на парковочном месте, или обращается к информационному серверу 3 для получения информации о доступных парковочных пространствах из информации 134 парковочного пространства. Затем устройство 10 управления обнаруживает рекомендованное парковочное пространство среди доступных парковочных пространств и передает информацию о рекомендованном парковочном пространстве в операционный терминал 5, который отображает на своем дисплее 53 информацию о рекомендованном парковочном пространстве. Оператор прикасается к значку рекомендованного парковочного пространства, отображаемому на дисплее 53 типа панели касания операционного терминала 5, чтобы указать целевую парковочную рамку. Это позволяет устройству 10 управления задавать следующую целевую позицию парковки.
[0055]
Время задания следующей целевой позиции парковки не ограничивается переходом в режим восстановления, а также может происходить до перехода в режим восстановления. Например, когда в ходе установки целевой позиции парковки обнаруживаются два или более доступных парковочных пространств, устройство 10 управления может назначать приоритеты доступным парковочным пространствам в соответствии с заранее определенным правилом и предварительно задать в качестве следующей целевой позиции парковки одно из доступных парковочных пространств с более высоким приоритетом, которые не выбраны в качестве целевой позиции парковки.
[0056]
В примере по фиг. 4A, парковочное место PL2 скомпоновано параллельно с парковочным местом PL1, и парковочные места для трех транспортных средств существуют между парковочным местом PL1 и парковочным местом PL2. После перехода в режим восстановления сначала устройство 10 управления задает парковочное место PL2, которое является доступным парковочным местом, в качестве следующей целевой позиции парковки на основе команды от оператора и генерирует маршрут парковки, соответствующий парковочному месту PL2 в качестве следующего маршрута парковки RPL2. Затем, при обнаружении того, что следующий маршрут RPL2 парковки включает в себя позицию поворота для парковки CR, устройство 10 управления в качестве следующего направления парковки задает направление по маршруту от позиции поворота для парковки CR до парковочного места PL2 на следующем маршруте RPL2 парковки и задает, что следующее направление парковки является обратным направлением. Устройство 10 управления устанавливает начальную позицию парковки, которая является начальной точкой следующего маршрута RPL2 парковки, в качестве позиции PR восстановления и генерирует маршрут RR восстановления из текущей позиции транспортного средства V в позицию PR восстановления. В примере по фиг.4А маршрут RR восстановления обозначен изогнутым маршрутом, по которому транспортное средство V движется влево при движении вперед. Устройство 10 управления вычисляет целевой угол руления и целевую скорость для передвижения транспортного средства V в позицию PR восстановления по маршруту RR восстановления и выводит вычисленный целевой угол руления и целевую скорость на контроллер 70 транспортного средства. Транспортное средство V может передвигаться в позицию PR восстановления, чтобы таким образом эвакуироваться от препятствия OB и парковочного места PL1. В примере по фиг. 4А, состояние транспортного средства V после передвижения в позицию PR восстановления указывается как транспортное средство V’.
[0057]
Транспортное средство V передвигается контроллером 70 транспортного средства в позицию, отделенную от препятствия OB и парковочного места PL1. Эта позиция является начальной точкой маршрута парковки к парковочному месту PL2. Посредством этой операции оператор операционного терминала 5 может достигать выполнение управления парковкой для парковочного места PL2 и парковать транспортное средство V’ беспроблемно назад на парковочное место PL2 вдоль следующего маршрута RPL2 парковки. Управление парковкой на парковочное место PL2 не ограничивается дистанционным управлением операционным терминалом 5. Например, водитель может сесть в транспортное средство V’ и парковать транспортное средство V’ назад на парковочное место PL2 вдоль следующего маршрута RPL2 парковки.
[0058]
В примере по фиг. 4B, парковочное место PL2 обращено к парковочному месту PL1 через проход Pa и расположено по диагонали напротив парковочного места PL1. После перехода в режим восстановления устройство 10 управления задает парковочное место PL2, которое является доступным парковочным пространством, в качестве следующей целевой позиции парковки на основе команды от оператора. Затем устройство 10 управления указывает направление RPL2 вдоль маршрута парковки в направлении парковочного места PL2 в качестве следующего направления парковки, потому что парковочное место PL2 расположено по диагонали напротив парковочного места PL1. Передняя часть остановленного транспортного средства V обращена к парковочному месту PL2, и поэтому устройство 10 управления задает, что следующим направлением парковки является направление вперед в направлении вдоль маршрута парковки. Устройство 10 управления устанавливает позицию, из которой транспортное средство может быть припарковано вперед на парковочное место PL2, в качестве позиции PR восстановления и генерирует маршрут RR восстановления от текущей позиции транспортного средства V в позицию PR восстановления. В примере по фиг. 4В маршрут RR восстановления указан изогнутым маршрутом для передвижения транспортного средства V в левую сторону при движении вперед. Контроллер 70 транспортного средства выполняет управление вождением, чтобы передвигать транспортное средство V в позицию PR восстановления, и транспортное средство V тем самым может эвакуироваться от препятствия OB и парковочного места PL1. В примере по фиг. 4B, состояние транспортного средства V после передвижения в позицию PR восстановления указывается как транспортное средство V’.
[0059]
Транспортное средство V передвигается контроллером 70 транспортного средства в позицию, отделенную от препятствия OB и парковочного места PL1. Эта позиция является позицией, обращенной к передней части парковочного места PL2. Посредством этой операции оператор операционного терминала 5 может достигать выполнения управления парковкой для парковочного места PL2 и передвигать и парковать транспортное средство V’ на парковочное место PL2. Управление парковкой на парковочном месте PL2 не ограничивается дистанционным управлением посредством операционного термина 5. Например, водитель может сесть в транспортное средство V’ и передвигать и парковать транспортное средство V’ вперед на парковочное место PL2. Позиция PR восстановления может быть установлена на позиции рядом с парковочным местом PL1. Например, позиция PR восстановления может быть установлена в соответствии с позицией, в которой водитель может легко сесть в транспортное средство.
[0060]
На примере Фиг. 4C парковочное место PL1 скомпоновано параллельно с другими парковочными местами, в то время как парковочное место PL2 скомпоновано способом параллельной парковки с другими парковочными местами. После перехода в режим восстановления, во-первых, устройство 10 управления задает парковочное место PL2, которое является доступным парковочным пространством, в качестве следующей целевой позиции парковки на основе команды от оператора. Затем, устройство 10 управления генерирует маршрут парковки RPL2 для параллельной парковки на парковочное место PL2 от отношения компоновки между парковочным местом PL2 и парковочными местами на обеих сторонах и задает обратное направление в направлении вдоль маршрута парковки для параллельной парковки в качестве следующего направления парковки. Устройство 10 управления устанавливает позицию, из которой транспортное средство может быть припарковано способом параллельной парковки на парковочном месте PL2 в качестве позиции PR восстановления и генерирует маршрут RR восстановления от текущей позиции транспортного средства V к позиции PR восстановления. В примере Фиг. 4C, маршрут RR восстановления указан изогнутым маршрутом для транспортного средства V для передвижения в левую сторону при движении вперед. Контроллер 70 транспортного средства выполняет вождение транспортного средства для передвижения транспортного средства V в позицию PR восстановления, и транспортное средство V может таким образом эвакуироваться от препятствия OB и парковочного места PL1. В примере Фиг. 4C состояние транспортного средства V после передвижения в позицию PR восстановления указывается как транспортное средство V’.
[0061]
Транспортное средство V передвигается контроллером 70 транспортного средства в позицию, отделенную от препятствия OB и парковочного места PL1. Эта позиция представляет собой позицию, которая находится на линии примерно параллельно направлению парковки на парковочное место PL2 и из которой возможно движение назад. Благодаря этой операции, оператор операционного терминала 5 может достигать выполнения управления парковкой на парковочное место PL2 и двигаться и парковать транспортное средство V’ беспроблемно назад на парковочное место PL2 способом параллельной парковки. Управление парковкой на парковочное место PL2 не ограничивается дистанционным управлением в эксплуатации операционным терминалом 5. Например, водитель может сесть в транспортное средство V’ и двигаться и парковать транспортное средство V’ назад на парковочное место PL2 способом параллельной парковки.
[0062]
Процедура управления для управления парковкой будет описана ниже со ссылкой на Фиг. 5. Фиг. 5 представляет собой блок-схему последовательности операций, иллюстрирующую процедуру управления для управления парковкой, выполняемую системой 1000 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Стартовый триггер для процесса управления парковкой конкретно не ограничен, и процесс управления парковкой может быть запущен с помощью стартового выключателя аппарата управления парковкой 100.
[0063]
На этапе S101 устройство 10 управления упомянутой аппаратуры 100 управления парковкой получает информацию вокруг транспортного средства. Устройство 10 управления при необходимости получает сигналы дальности от дальномерных устройств 2, прикрепленных к множественным объектам транспортного средства. Кроме того, или в качестве альтернативы, устройство 10 управления получает, по мере необходимости, изображения, захваченные камерами 1a-1d, прикрепленными к множественным объектам транспортного средства. Получение сигналов дальности от дальномерных устройств 2 и получение захваченных изображений из набора камер 1 может быть выполнено выборочно.
[0064]
На этапе S102 устройство 10 управления обнаруживает доступные парковочные пространства. Устройство 10 управления обнаруживает рамки (зоны) парковочных пространств на основе изображений, захваченных камерами 1a-1d. Устройство 10 управления обнаруживает пустые парковочные пространства, используя данные обнаружения от дальномерных устройств 2 и/или данные обнаружения, извлеченные из захваченных изображений. Устройство 10 управления обнаруживает доступные парковочные пространства из числа парковочных пространств. Доступные парковочные пространства - это парковочные пространства, которые пусты (т. е. другие транспортные средства не припаркованы) и для которых можно вычислить маршруты для завершения парковки. В одном или более вариантах осуществления настоящего изобретения условие, что маршрут парковки может быть вычислен, означает, что траектория маршрута от текущей позиции до целевой позиции парковки может быть воспроизведена по координатам поверхности дороги без помех со стороны препятствий (включая припаркованные транспортные средства).
[0065]
На этапе 103 устройство 10 управления передает доступные парковочные парковки на операционный терминал 5, управляет дисплеем 53 операционного терминала 5, чтобы отобразить доступные парковочные парковки, и запрашивает оператора ввести информацию выбора целевой позиции парковки для парковки транспортного средства. Целевая позиция парковки может быть автоматически выбрана устройством 10 управления или стороной парковочного объекта. Когда рабочая команда задания доступного парковочного пространства вводится в операционный терминал 5, доступное парковочное пространство устанавливается в качестве целевой позиции парковки.
[0066]
В одном или нескольких вариантах осуществления настоящего изобретения оператор выполняет так называемый процесс удаленной парковки, при котором оператор покидает транспортное средство и паркует транспортное средство снаружи. На этапе S104 оператор операционного терминала 5 и другие пассажиры транспортного средства выходят из транспортного средства. Оператор, который выходит из транспортного средства, вводит операционную информацию, касающуюся процесса парковки, в операционный терминал 5. Операционная информация включает в себя, по меньшей мере, инструкцию запуска для процесса парковки. Операционная информация передается на устройство 10 управления.
[0067]
На этапе S105 устройство 10 управления обнаруживает позиция оператора. Устройство 10 управления обнаруживает позицию оператора, например, любым из способов, описанных со ссылкой на фиг. с 2А до 2С. Например, при обнаружении оператора по захваченным изображениям от набора камер 1 или по данным обнаружения от дальномерных устройств 2 устройство 10 управления обнаруживает относительную позицию оператора относительно транспортного средства.
[0068]
На этапе S106 устройство 10 управления вычисляет маршрут парковки до целевой позиции парковки. Маршрут парковки включает в себя позицию поворота для парковки, требуемую для передвижения на доступное парковочное пространство. Для этого вычисления маршрут парковки определяется как линия, а также определяется как полосообразная область, соответствующая занимаемой области транспортным средством на основе ширины транспортного средства. Занимаемая область транспортным средством определяется с учетом ширины транспортного средства и ширины запаса, обеспечиваемой для передвижения. Устройство 10 управления генерирует инструкцию управления для передвижения транспортного средства по вычисленному маршруту парковки. Устройство 10 управления управляет дисплеем 53 операционного терминала 5 для отображения маршрута парковки и предлагает оператору подтвердить его.
[0069]
На этапе S107 устройство 10 управления начинает выполнение управления парковкой, когда оператор подтверждает маршрут парковки и вводит инструкцию выполнения в операционный терминал 5. Это позволяет транспортному средству начать передвижение по маршруту парковки в направлении целевой позиции парковки.
[0070]
На этапе S108 устройство 10 управления определяет, обнаружено ли препятствие на или около маршрута парковки. Устройство 10 управления непрерывно получает захваченные изображения из набора камер 1 и/или данные обнаружения от дальномерных устройств 2, чтобы определить, существует ли препятствие вокруг транспортного средства. Когда препятствие обнаружено, процесс переходит к этапу S109, в то время как когда препятствие не обнаруживается, процесс переходит к этапу S112.
[0071]
На этапе S109 устройство 10 управления управляет транспортным средством, чтобы сделать остановку, чтобы избежать контакта между транспортным средством и препятствием. Например, устройство 10 управления получает расстояние от транспортного средства до препятствия, обнаруженного на этапе S108, и вычисляет замедление для целевой скорости в соответствии с полученным расстоянием. Затем устройство 10 управления принудительно снижает целевую скорость, чтобы остановить транспортное средство.
[0072]
На этапе S110 устройство 10 управления управляет дисплеем 53 операционного терминала 5 для представления информации, которая позволяет переходить в режим восстановления, чтобы позволить оператору выбирать, переходить ли в режим восстановления или нет. Например, дисплей 53 отображает информацию о том, что транспортное средство остановилось из-за обнаружения препятствия, и информацию, которая обеспечивает переход в режим восстановления, и оператор может выбирать режим восстановления и нажимать кнопку ввода, чтобы достичь перехода в режим восстановления. За переходом в режим восстановления следует этап S111, в то время как за не переходом в режим восстановления следует этап S212.
[0073]
На этапе S111 устройство 10 управления начинает управление, чтобы заставить транспортное средство, остановленное на этапе S109, покинуть препятствие и целевую позицию парковки. Операция после перехода в режим восстановления будет описана позже.
[0074]
С другой стороны, когда маршрут парковки, вычисленный на этапе S106, включает в себя позицию поворота для парковки, устройство 10 управления на этапе S112 определяет, достигло ли транспортное средство позиции поворота для парковки. Например, устройство 10 управления выполняет определение, сравнивая текущую позицию транспортного средства с позицией поворота для парковки. Когда определено, что транспортное средство достигло позиции поворота для парковки, процесс переходит к этапу S113, в то время как когда определяется, что транспортное средство не достигло позиции поворота для парковки, процесс возвращается к этапу S108.
[0075]
На этапе S113 устройство 10 управления выполняет переключение передач, включенное в инструкцию управления. После этого устройство 10 управления завершает управление парковкой, непрерывно выполняя инструкцию управления на этапе S114. Когда маршрут парковки, вычисленный на этапе S106, не включает в себя позицию поворота для парковки, этапы S112 и S113 могут быть опущены.
[0076]
Ниже описана процедура управления в режиме восстановления со ссылкой на блок-схему последовательности операций, показанную на фиг. 6. Когда выполнение режима восстановления определяется оператором на этапе S110, показанном на фиг. 5, устройство 10 управления обнаруживает позицию оператора на этапе S115. Способ обнаружения позиции оператора может быть таким же, как способ обнаружения на этапе S105, показанном на фиг. 5 или также может быть другим способом.
[0077]
На этапе S116 устройство 10 управления вычисляет маршрут восстановления до позиции восстановления. Сначала устройство 10 управления задает следующую целевую позицию парковки. Например, как на этапе S103, устройство 10 управления передает доступные парковочные пространства на операционный терминал 5, управляет дисплеем 53 операционного терминала 5, чтобы отобразить доступные парковочные пространства, и запрашивает оператора ввести информацию выбора следующей целевой позиции парковки для парковки транспортного средства.
[0078]
Затем устройство 10 управления задает следующее направление парковки, которое является направлением парковки, когда транспортное средство припарковано в следующей целевой позиции парковки. Например, устройство 10 управления генерирует маршрут парковки для парковки в следующей целевой позиции парковки. В примере по фиг. 4A, после указания парковочного места PL2 в качестве следующей целевой позиции парковки, устройство 10 управления генерирует следующий маршрут RPL2 парковки в качестве маршрута парковки для парковки на парковочном месте PL2. Устройство 10 управления задает направление от позиции поворота для парковки, включенной в следующий маршрут RPL2 парковки, до следующей целевой парковки в качестве следующего направления парковки (направление назад).
[0079]
Затем устройство 10 управления вычисляет направление передвижения транспортного средства на основе следующего направления парковки. Например, устройство 10 управления вычисляет направление передвижения транспортного средства посредством установки позиции восстановления и генерирования маршрута восстановления из текущей позиции в позицию восстановления. В примере по фиг. 4А устройство 10 управления устанавливает начальную позицию парковки, которая является начальной позицией следующего маршрута RPL2 парковки, в качестве позиции PR восстановления и вычисляет маршрут RR восстановления в позицию PR восстановления.
[0080]
Настоящее изобретение не ограничивается указанием следующей целевой позиции парковки на вышеупомянутом этапе, и кандидаты на целевую позицию парковки могут быть предварительно указаны на другом этапе. Например, когда два или более доступных парковочных пространства обнаружены на этапе S102, показанном на фиг. 5, приоритеты назначаются доступным парковочным пространствам в соответствии с заранее определенным правилом, и доступное парковочное пространство, отличное от доступного парковочного пространства, выбранного на этапе S103, может быть определено в качестве следующей целевой позиции парковки.
[0081]
Кроме того, настоящее изобретение не ограничивается указанием следующего направления парковки из следующего маршрута парковки и, как показано на фиг. 4B, следующее направление парковки может быть задано на основе позиционного соотношения между целевой позицией парковки и следующей целевой позицией парковки для вычисления маршрута восстановления. Устройство 10 управления управляет дисплеем 53 операционного терминала 5 для отображения маршрута восстановления и предлагает оператору подтвердить его.
[0082]
На этапе S117 устройство 10 управления начинает выполнение управления восстановлением, когда оператор подтверждает маршрут восстановления и вводит инструкцию выполнения в операционный терминал 5. Это позволяет транспортному средству начать передвижение по маршруту восстановления к позиции восстановления.
[0083]
Когда маршрут восстановления, вычисленный на этапе S117, включает в себя позицию поворота, устройство 10 управления на этапе S118 определяет, достигло ли транспортное средство позиции поворота. Когда определено, что транспортное средство достигло позиции поворота, процесс переходит к этапу S119, на котором устройство 10 управления выполняет переключение передач, включенное в инструкцию управления. С другой стороны, когда определено, что транспортное средство не достигло позиции поворота, процесс на этапе S118 ожидает, пока транспортное средство не достигнет позиции поворота.
[0084]
Когда транспортное средство достигает позиции восстановления вдоль маршрута восстановления на этапе S120, устройство 10 управления управляет транспортным средством, чтобы сделать остановку на этапе S121. Затем на этапе S122 устройство 10 управления обнаруживает позицию оператора, чтобы начать управление парковкой к следующей целевой позиции парковки.
[0085]
На этапе S123 устройство 10 управления вычисляет следующий маршрут парковки до следующей целевой позиции парковки. Когда следующий маршрут парковки предварительно указывается на этапе S116, устройство 10 управления может только вычислить инструкцию управления для передвижения транспортного средства по следующему маршруту парковки. Устройство 10 управления управляет дисплеем 53 операционного терминала 5 для отображения следующего маршрута парковки и предлагает оператору подтвердить его. На этапе S124 устройство 10 управления начинает выполнение управления парковкой, когда оператор подтверждает следующий маршрут парковки и вводит инструкцию выполнения в операционный терминал 5.
[0086]
Этапы S125-S127 соответствуют этапам S112-S114, показанным на фиг. 5, и предыдущее описание заимствовано здесь для описания этих этапов. После того как процесс этапа S127 завершен, транспортное средство находится в состоянии парковки в следующей целевой позиции парковки, и процесс управления парковкой, таким образом, заканчивается.
[0087]
Как описано выше, способ управления парковкой для транспортного средства в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя, когда управление парковкой для целевой позиции парковки приостановлено, и транспортное средство покидает целевую позицию парковки, вычисление маршрута восстановления на основе направления парковки, когда транспортное средство припарковано на следующей целевой позиции парковки и передвижение транспортного средства по маршруту восстановления. После передвижения по маршруту восстановления транспортное средство останавливается в позиции, которая определяется с учетом парковки в следующей целевой позиции парковки. Например, транспортное средство делает остановку в состоянии, в котором передняя часть транспортного средства обращена к следующей целевой позиции парковки. Это позволяет оператору операционного терминала 5 беспроблемно парковать транспортное средство в следующей целевой позиции парковки посредством дистанционной операции или вождения, и, следовательно, можно препятствовать тому, чтобы оператор операционного терминала 5 давал инструкцию или тому подобное для следующего направления парковки и облегчить нагрузку, налагаемую на оператора операционного терминала 5.
[0088]
В способе управления парковкой для транспортного средства в соответствии с одним или несколькими вариантами осуществления настоящего изобретения задается следующая целевая позиция парковки, и позиции восстановления, в которую передвигается транспортное средство, вычисляется на основе заданной следующей целевой позиции парковки. Затем транспортное средство движется по маршруту восстановления, заканчивающемуся в позиции восстановления. Позиции восстановления - это эвакуационная позиция для временного выхода из первоначальной целевой позиции парковки и, например, это позиция, близкая к следующей целевой позиции парковки. Это позволяет транспортному средству эвакуироваться из первоначальной целевой позиции парковки и приближаться к следующей целевой позиции парковки. В результате, управление парковкой до следующей целевой позиции парковки может выполняться беспроблемно.
[0089]
В способе управления парковкой для транспортного средства согласно одному или нескольким вариантам осуществления настоящего изобретения положение, позиция, в которой транспортное средство начинает управление парковкой для следующей целевой позиции парковки, вычисляется как позиция восстановления. Это позволяет беспроблемно выполнять управление парковкой до следующей целевой позиции парковки.
[0090]
В способе управления парковкой для транспортного средства в соответствии с одним или несколькими вариантами осуществления настоящего изобретения задается следующий маршрут парковки для транспортного средства для передвижения в следующую целевую позицию парковки, и следующее направление парковки задается из направления вдоль следующего маршрута парковки. Например, аппаратура 100 управления парковкой может задавать следующий маршрут парковки путем вычисления маршрута парковки, соответствующего установленной следующей целевой позиции парковки. Это позволяет транспортному средству передвигаться в позицию, которая определяется с учетом следующего направления парковки, и управление парковкой до следующей целевой позиции парковки может выполняться беспроблемно.
[0091]
В способе управления парковкой для транспортного средства согласно одному или нескольким вариантам осуществления настоящего изобретения следующее направление парковки задается от направления к следующей целевой позиции парковки из первоначальной целевой позиции парковки. Например, когда следующая целевая позиция парковки расположена в позиции, обращенной к целевой позиции парковки через проход, направление, в котором транспортное средство стоит перед следующей целевой позицией парковки, может быть задано в качестве следующего направления парковки. Когда задняя часть транспортного средства обращена к следующей целевой позиции парковки, направление назад задается в качестве следующего направления парковки, в то время как когда передняя часть транспортного средства обращена к следующей целевой позиции парковки, направление вперед задается в качестве следующего направления парковки. Это позволяет легко задавать следующее направление парковки, и управление парковкой до следующей целевой позиции парковки может выполняться беспроблемно.
[0092]
В способе управления парковкой для транспортного средства в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда следующий маршрут парковки включает в себя позицию поворота для парковки, следующее направление парковки задается от направления к следующей целевой позиции парковки от позиции поворота для парковки. Это позволяет легко задавать следующее направление парковки даже для сложного маршрута, такого как следующий целевой маршрут парковки, включающий в себя позицию поворота для парковки, и управление парковкой до следующей целевой позиции парковки может выполняться беспроблемно.
[0093]
В способе управления парковкой для транспортного средства в соответствии с одним или несколькими вариантами осуществления настоящего изобретения следующее направление парковки задается на основе следующей целевой позиции парковки и направления транспортного средства в позиции, в которой управление парковкой к целевой позиции парковки приостановлено. Например, когда доступное парковочное пространство, которое является следующей целевой позицией парковки, скомпоновано параллельно с другими парковочными пространствами, и транспортное средство останавливается, когда его задняя часть обращена к следующей целевой позиции парковки, делается определение, что транспортное средство может быть легко быть припаркованным на следующей целевой позиции парковки, двигаясь назад, поддерживая направление транспортного средства, а направление назад задается в качестве следующего направления парковки. Это позволяет беспроблемно выполнять управление парковкой до следующей целевой позиции парковки.
[0094]
Варианты осуществления, описанные выше, описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
[0095]
Например, в вышеописанных вариантах осуществления настоящее изобретение было описано посредством примера случая, в котором аппаратура 100 управления парковкой обнаруживает или предварительно обнаружила следующее доступное парковочное пространство, когда транспортное средство покидает первоначальную целевую позицию парковки, но настоящее изобретение, возможно, не должно предполагать обнаружение следующего доступного парковочного пространства.
[0096]
Пример работы в режиме восстановления, когда следующее доступное парковочное пространство не обнаружено или не было предварительно обнаружено, будет описан со ссылкой на фиг. 7. Как и на фиг. 4А-фиг. 4C, фиг. 7 иллюстрирует сцену, в которой обнаружено препятствие OB, когда аппаратура 100 управления парковкой выполняет управление парковкой для парковки транспортного средства V назад на парковочное место PL1. В этой сцене устройство 10 управления определяет, что транспортное средство V не может быть припарковано на парковочном месте PL1, и определяет переход в режим восстановления на основе рабочей команды от оператора. В примере, показанном на фиг. 7 предполагается, что аппаратура 100 управления парковкой не обнаружила следующее доступное парковочное пространство. На фиг. 7, также предполагается, что транспортное средство V двигалось в направлении, указанном стрелкой (направление A), и прибыло в окрестности парковочного места PL1. Другими словами, предполагается, что транспортное средство V не двигалось в направлении B, противоположном направлению A, до начала управления парковкой в парковочное место PL1.
[0097]
В примере по фиг. 7, следующая целевая позиция парковки, которая является доступным парковочным пространством, не задана, и поэтому устройство 10 управления генерирует маршрут восстановления в направлении, отличном от направления A, и в направлении, в котором транспортное средство может передвигаться. Во-первых, устройство 10 управления задает направление, в котором транспортное средство V не перемещалось до прибытия в окрестности парковочного места PL1. Например, устройство 10 управления может ссылаться на историю перемещения транспортного средства V, чтобы задать направление, в котором транспортное средство V не перемещалось до прибытия в окрестности парковочного места PL1. В примере по фиг. 7, устройство 10 управления задает направление B как направление, в котором транспортное средство V не перемещалось. Устройство 10 управления может всесторонне учитывать структуру парковочного объекта (например, положения стен и проходов), местоположение парковочного места PL1 и т. д., чтобы определить, является ли интересующее направление направлением, в котором транспортное средство может передвигаться.
[0098]
Затем устройство 10 управления устанавливает позицию PR восстановления в качестве позиции для эвакуации с парковочного места PL1 в направлении направления B и генерирует маршрут RR восстановления из текущей позиции транспортного средства V в позицию PR восстановления. В примере по фиг. 7 маршрут RR восстановления обозначен изогнутым маршрутом, по которому транспортное средство V движется влево при движении вперед. Устройство 10 управления вычисляет целевой угол руления и целевую скорость для передвижения транспортного средства V в позицию PR восстановления вдоль маршрута RR восстановления и выводит вычисленный целевой угол руления и целевую скорость на контроллер 70 транспортного средства. Транспортное средство V может передвигаться в позицию PR восстановления, чтобы таким образом эвакуироваться от препятствия OB и парковочного места PL1. В примере по фиг.7 состояние транспортного средства V после передвижения в позицию PR восстановления указывается как транспортное средство V’.
[0099]
Таким образом, в способе управления парковкой для транспортного средства в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда следующая целевая позиция парковки не задана, перед тем, как начинается управление парковкой для целевой позиции парковки, маршрут восстановления генерируется в направление направления, в котором транспортное средство не перемещалось, и в направлении, в котором транспортное средство может передвигаться. Затем транспортное средство движется по маршруту восстановления. Посредством этой операции, даже когда следующее доступное парковочное пространство не задано, транспортное средство может двигаться в направлении, отличном от направления, в котором транспортное средство перемещалось до этих пор, и поэтому аппаратура 100 управления парковкой может легко задавать следующее доступное парковочное пространство.
[0100]
Дополнительно или альтернативно, когда транспортное средство покидает первоначальную целевую позицию парковки, например, аппаратура 100 управления парковкой может учитывать работоспособность операционного терминала 5 для задания следующего доступного парковочного пространства.
[0101]
Пример работы в режиме восстановления с указанием следующего доступного парковочного пространства с учетом работоспособности операционного терминала 5 будет описан со ссылкой на фиг. 8А и 8В. Как и на фиг. 4А, фиг. 8A иллюстрирует сцену, в которой обнаружено препятствие OB, когда аппаратура 100 управления парковкой выполняет управление парковкой для парковки транспортного средства V назад на парковочное место PL1. В этой сцене устройство 10 управления определяет, что транспортное средство V не может быть припарковано на парковочном месте PL1, и определяет переход в режим восстановления на основе рабочей команды от оператора. Предполагается, что аппаратура 100 управления парковкой обнаружила парковочные места PL2 и PL3 в качестве кандидатов на следующую целевую позицию парковки.
[0102]
В примере по фиг. 8A устройство 10 управления принимает во внимание работоспособность для оператора M для задания одной следующей целевой позиции парковки из множества кандидатов на следующую целевую позицию парковки со ссылкой на взаимосвязь между позицией оператора M и позицией парковочного места. В частности, устройство 10 управления выбирает парковочное место с высокой видимостью из позиции оператора М в качестве следующей целевой позиции парковки из множества кандидатов на следующую целевую позицию парковки. Относительно того, является ли видимость высокой, например, когда расстояние между оператором и парковочным местом короткое, может быть сделано определение, что видимость может быть высокой, и когда существует препятствие между оператором и парковочным местом, может быть сделано определение, что видимость может быть низкой. Определение того, является ли видимость высокой, не ограничивается вышеописанным примером. Например, определение может быть сделано с учетом угла парковочного места, просматриваемого оператором M, с использованием трехмерной позиции, такой как высота, глаз оператора M.
[0103]
Например, устройство 10 управления обнаруживает позицию оператора M по позиционной информации операционного терминала 5 и сравнивает позиционное соотношение между оператором M и парковочным местом PL2 с позиционным отношением между оператором M и парковочным местом PL3, чтобы задать парковочное место с высокой видимостью с позиции оператора М в качестве следующей целевой позиции парковки. В примере по фиг. 8A, расстояние между оператором M и парковочным местом PL2 короче, чем расстояние между оператором M и парковочным местом PL3, и поэтому устройство 10 управления определяет, что оператор M расположен ближе к парковочному месту PL2, чем к парковочному месту PL3, и указывает парковочное место PL2 в качестве следующей целевой позиции парковки.
[0104]
Затем устройство 10 управления генерирует маршрут парковки для парковки на парковочном месте PL2 и устанавливает сгенерированный маршрут парковки в качестве следующего маршрута RPL2 парковки. Устройство 10 управления устанавливает позицию PR1 восстановления в позицию на следующем маршруте RPL2 парковки и генерирует маршрут RR1 восстановления в качестве маршрута для транспортного средства V, чтобы передвигаться из текущей позиции в позицию PR1 восстановления. Устройство 10 управления выводит целевой угол руления и целевую скорость для передвижения транспортного средства V по маршруту RR1 восстановления в контроллер 70 транспортного средства. Транспортное средство V передвигается контроллером 70 транспортного средства по маршруту RR1 восстановления. В примере по фиг.8А состояние транспортного средства V после передвижения в позицию PR1 восстановления указывается как транспортное средство V’.
[0105]
После того, как транспортное средство V передвигается в позицию PR1 восстановления, оператор M операционного терминала 5 может выполнить управление парковкой на парковочное место PL2 и беспроблемно припарковать транспортное средство V’ обратно на парковочное место PL2 вдоль следующего маршрута RPL2 парковки. Во время этой операции оператор M может подтвердить, что транспортное средство V’ передвигается на парковочное место PL2 рядом с позицией оператора M в состоянии, в котором обеспечивается видимость.
[0106]
С другой стороны, фиг. 8B иллюстрирует сцену, в которой парковочное место PL3 задано в качестве следующей целевой позиции парковки посредством устройства управления для сравнительного примера. В этом случае устройство управления в сравнительном примере генерирует маршрут парковки для парковки на парковочное место PL3 и устанавливает сгенерированный маршрут парковки в качестве следующего маршрута RPL3 парковки. Устройство управления из сравнительного примера устанавливает позицию PR2 восстановления в позицию на следующем маршруте RPL3 парковки и генерирует маршрут RR2 восстановления в качестве маршрута для транспортного средства V, чтобы передвигаться из текущей позиции в позицию PR2 восстановления. Устройство управления из сравнительного примера выводит целевой угол руления и целевую скорость для передвижения транспортного средства V по маршруту RR2 восстановления в контроллер 70 транспортного средства. Транспортное средство V передвигается контроллером 70 транспортного средства по маршруту RR2 восстановления. В примере по фиг. 8B состояние транспортного средства V после передвижения в позицию PR2 восстановления указывается как транспортное средство V’.
[0107]
После того, как транспортное средство V передвигается в позицию PR2 восстановления, оператор M операционного терминала 5 может выполнить управление парковкой на парковочное место PL3 и припарковать транспортное средство V’ назад на парковочное место PL3 вдоль следующего маршрута RPL3 парковки. Однако парковочное место PL3 находится дальше, чем парковочное место PL2 от оператора М; следовательно, видимость для оператора M не обеспечивается, и оператор M может приближаться к парковочному месту PL3, например, из позиции, проиллюстрированной в примере на фиг. 8В. В этом случае оператор М должен передвигаться для парковки транспортного средства на парковочное место PL3, которое является следующей целевой позицией парковки, и, как следствие, на оператора М может быть наложена нагрузка.
[0108]
В отличие от этого, как описано со ссылкой на фиг. 8A, когда парковочное место PL2 установлено в качестве следующей целевой позиции парковки устройством 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, оператор M может подтвердить, что транспортное средство V’ передвигается на парковочное место PL2 в состоянии в котором видимость обеспечена. Это может уменьшить ненужное передвижение оператора M для парковки транспортного средства в следующей целевой позиции парковки, и, в результате, нагрузка, налагаемая на оператора M, может быть уменьшена.
[0109]
Кроме того, в вышеописанных вариантах осуществления, например, настоящее изобретение было описано посредством примера случая, в котором информация 133 карты и информация 134 парковочного места хранятся в запоминающем устройстве 132 информационного сервера 3, но настоящее изобретение не ограничивается этим. Например, такая информация может храниться в ПЗУ 12 или ОЗУ 13 аппаратуры 100 управления парковкой.
[Описание позиционных обозначений]
[0110]
1000 Система управления парковкой
100 Аппаратура управления парковкой
10 Устройство управления
11 - ЦП
12 ПЗУ
13 ОЗУ
20 Входное устройство
21 Устройство связи
211 Антенны
30 Выходное устройство
31 Дисплей
1a-1d Камеры
2 Дальномерные устройства
3 Информационный сервер
131 Устройство связи
132 Запоминающее устройство
133 Информация карты
134 Информация парковочного места
5 Операционный терминал
51 Устройство связи
511 Антенна
52 Входное устройство
53 Дисплей
200 Бортовое устройство
40 Система привода
50 Датчик угла руления
60 Датчик скорости транспортного средства
70 Контроллер
71 - ЦП
72 ПЗУ
73 ОЗУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2746684C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736520C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736518C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2742530C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2730808C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2733300C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
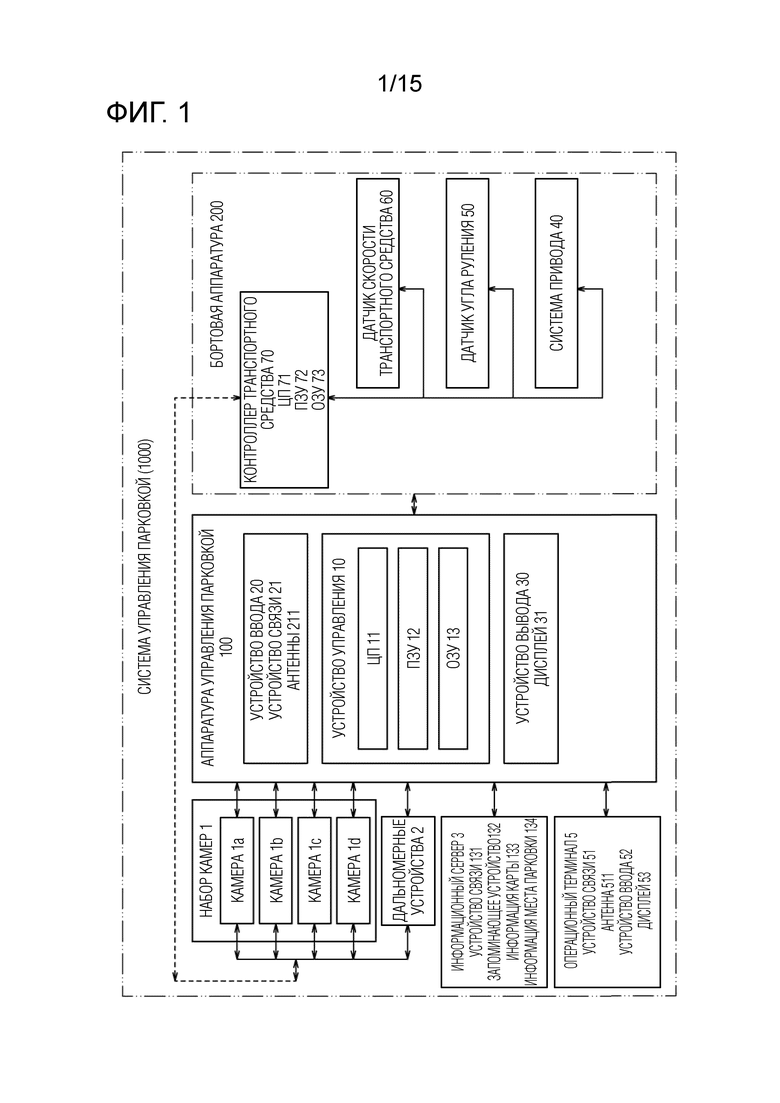
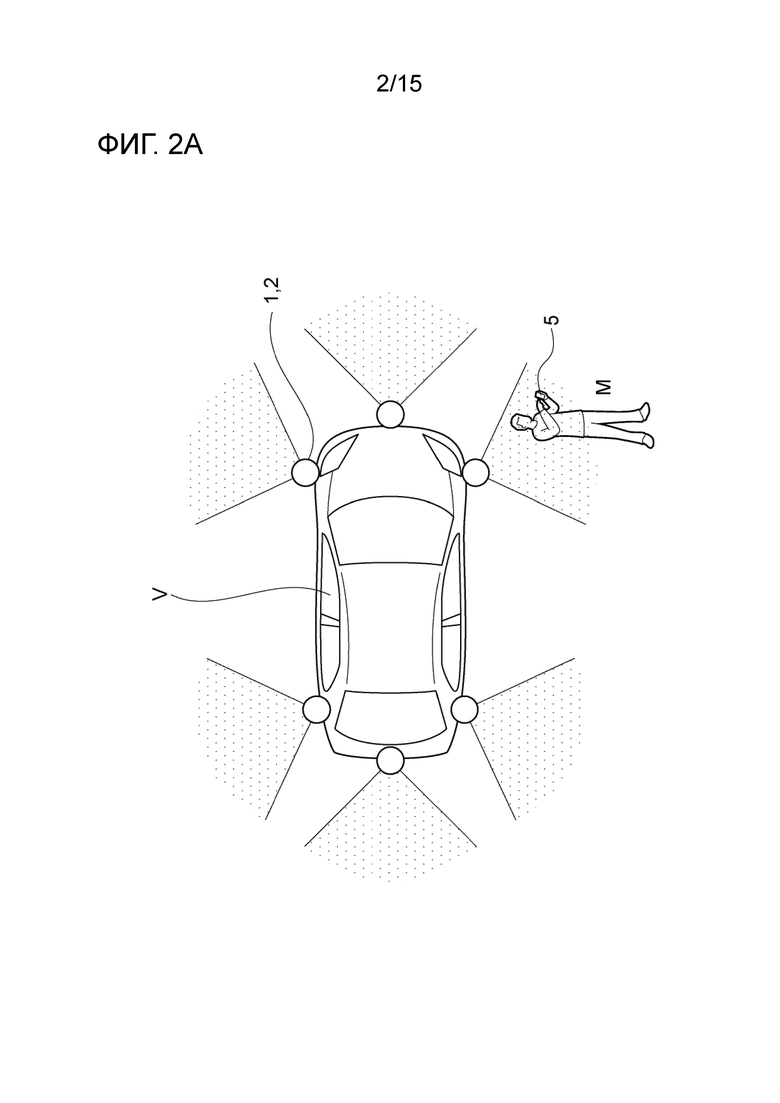
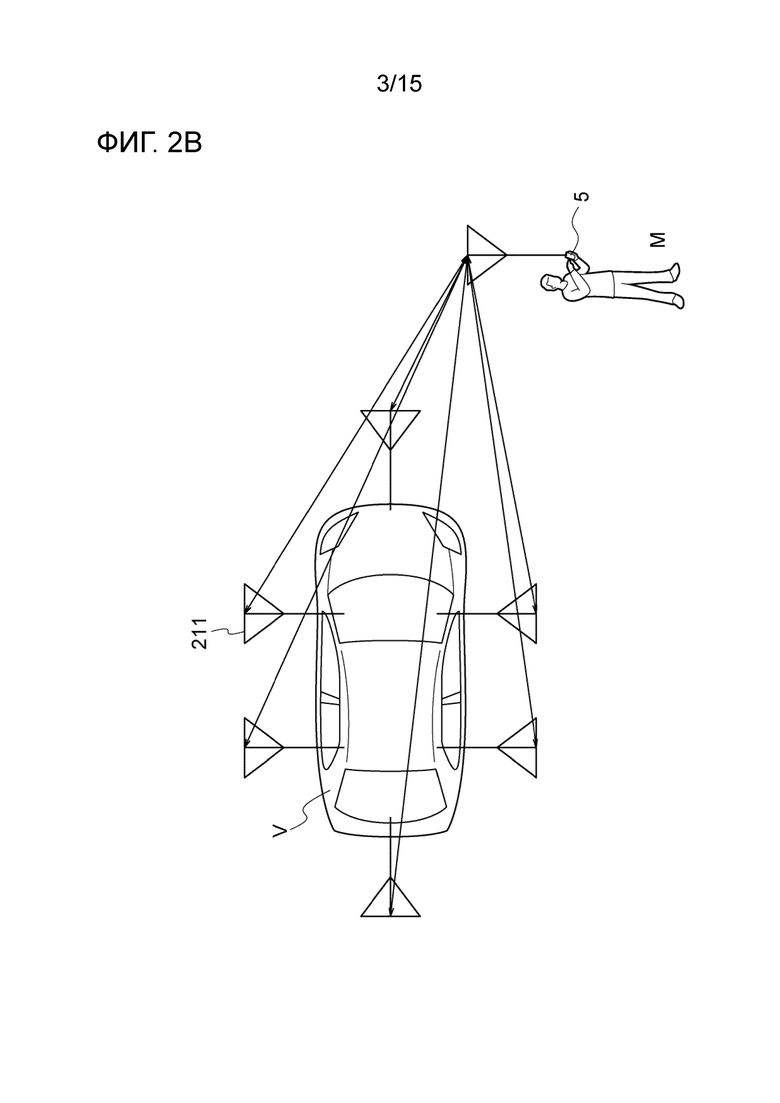
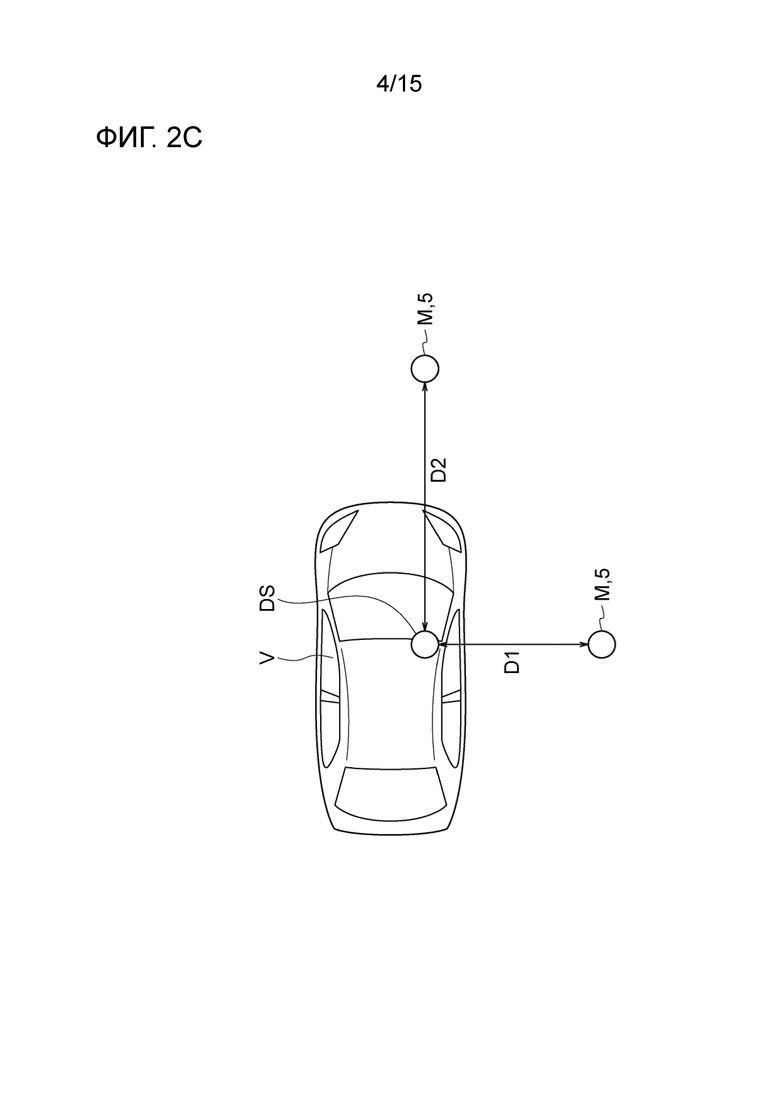
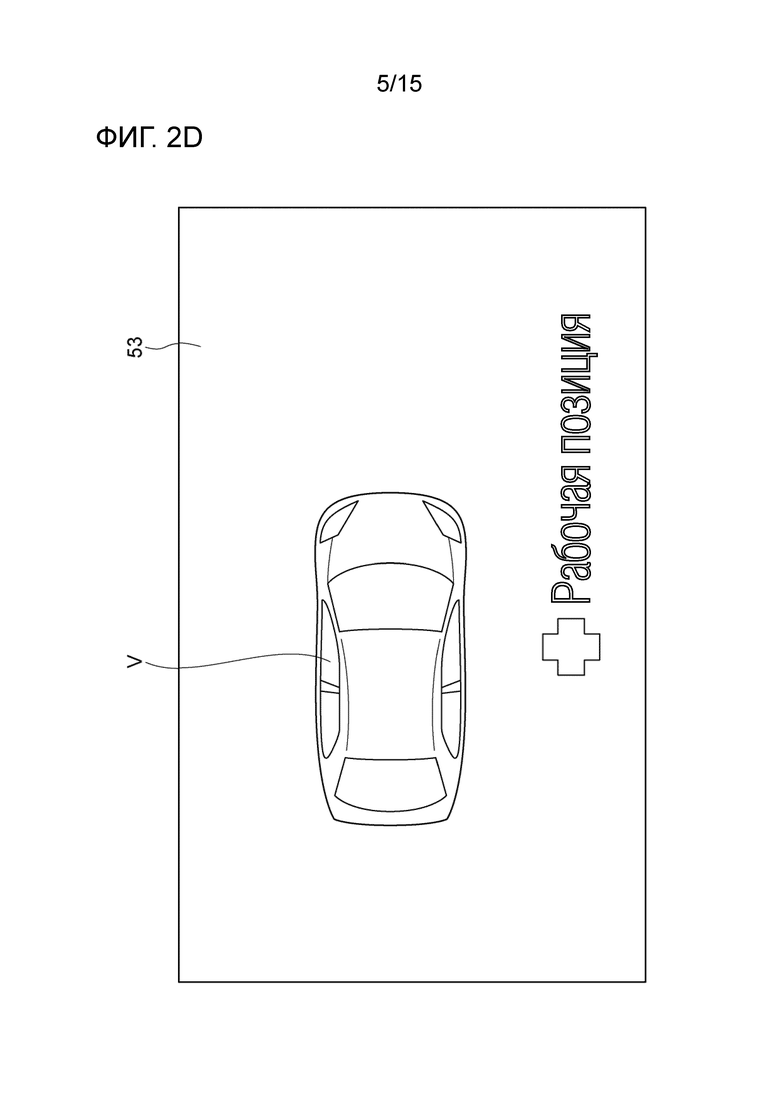
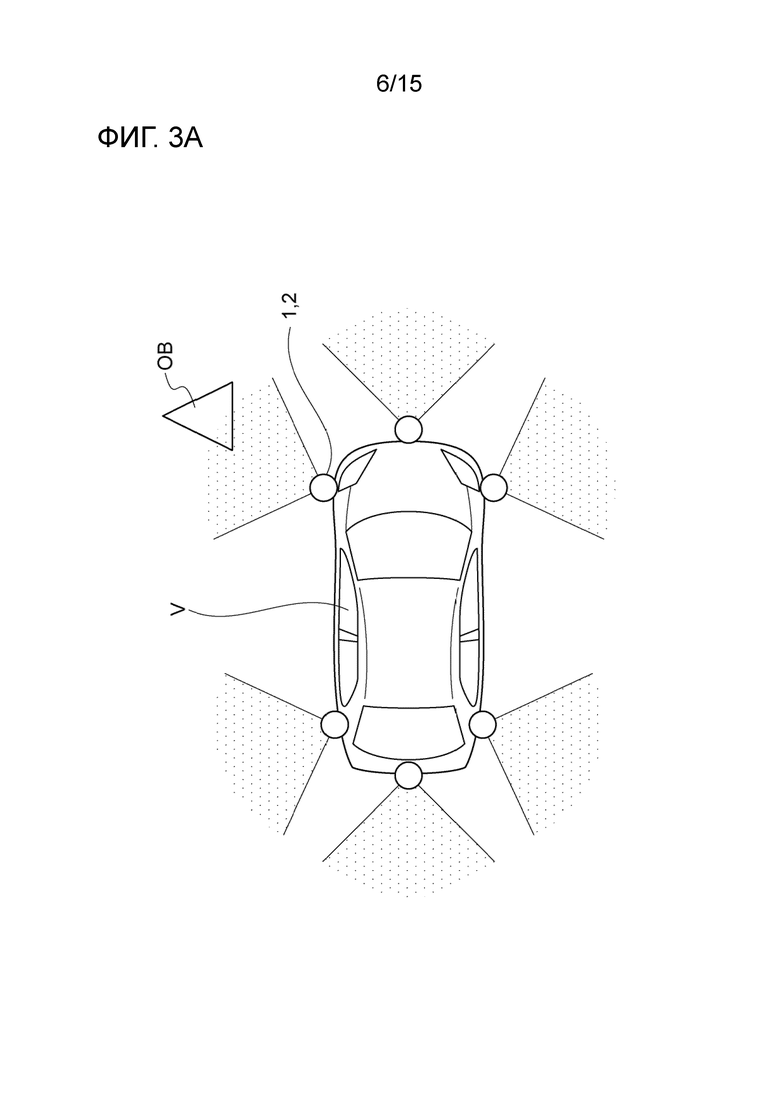
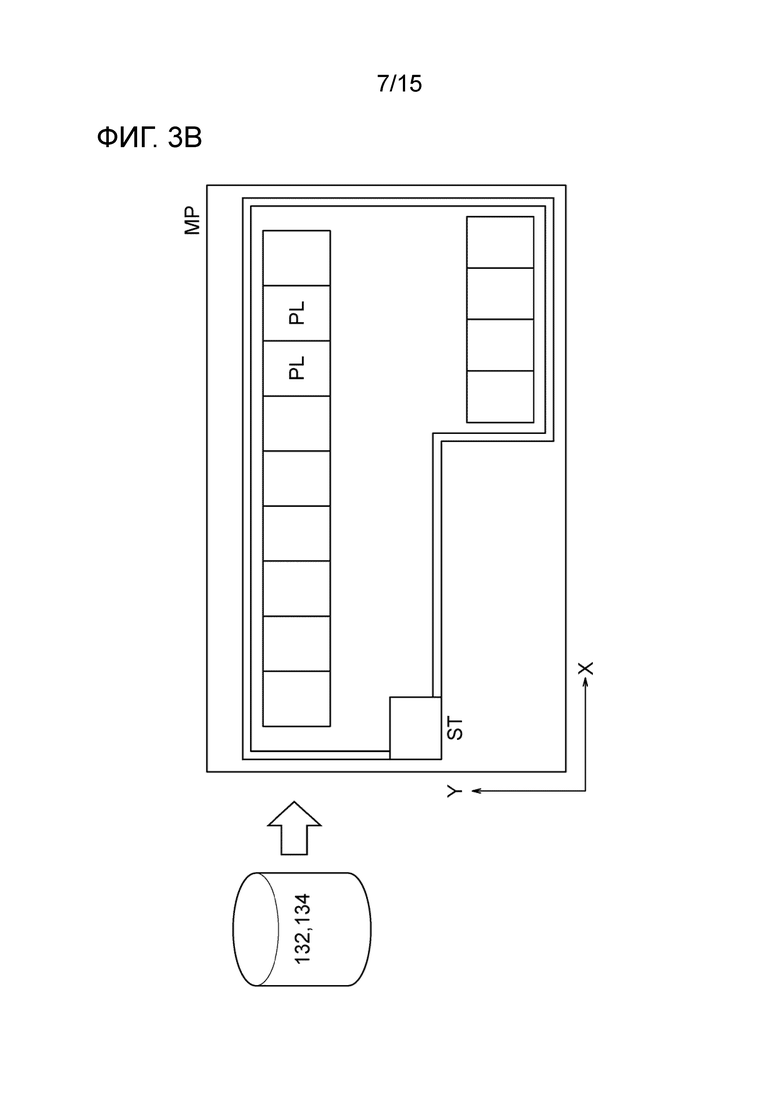
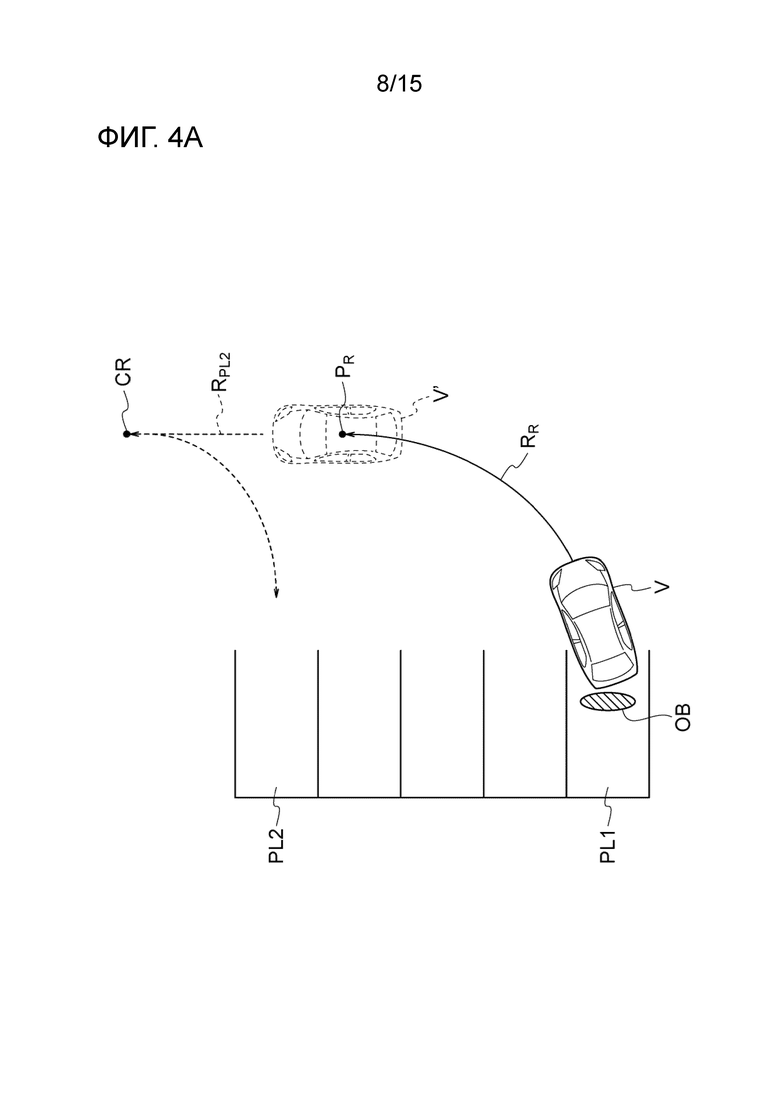
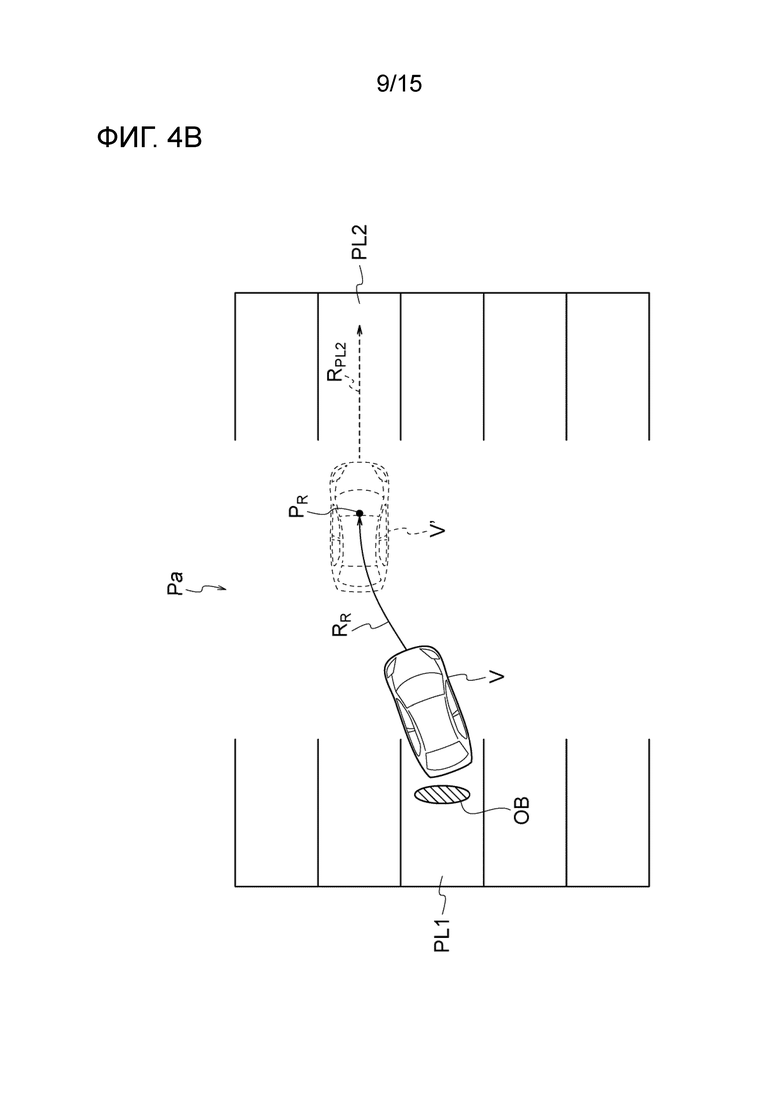
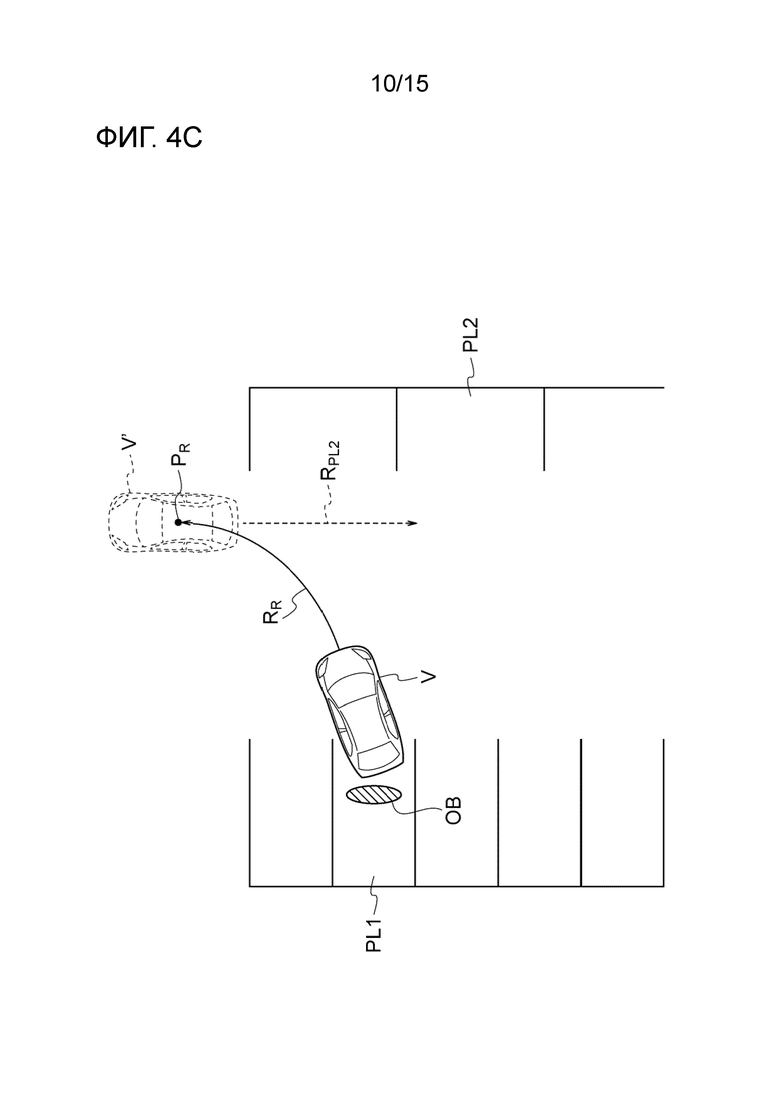
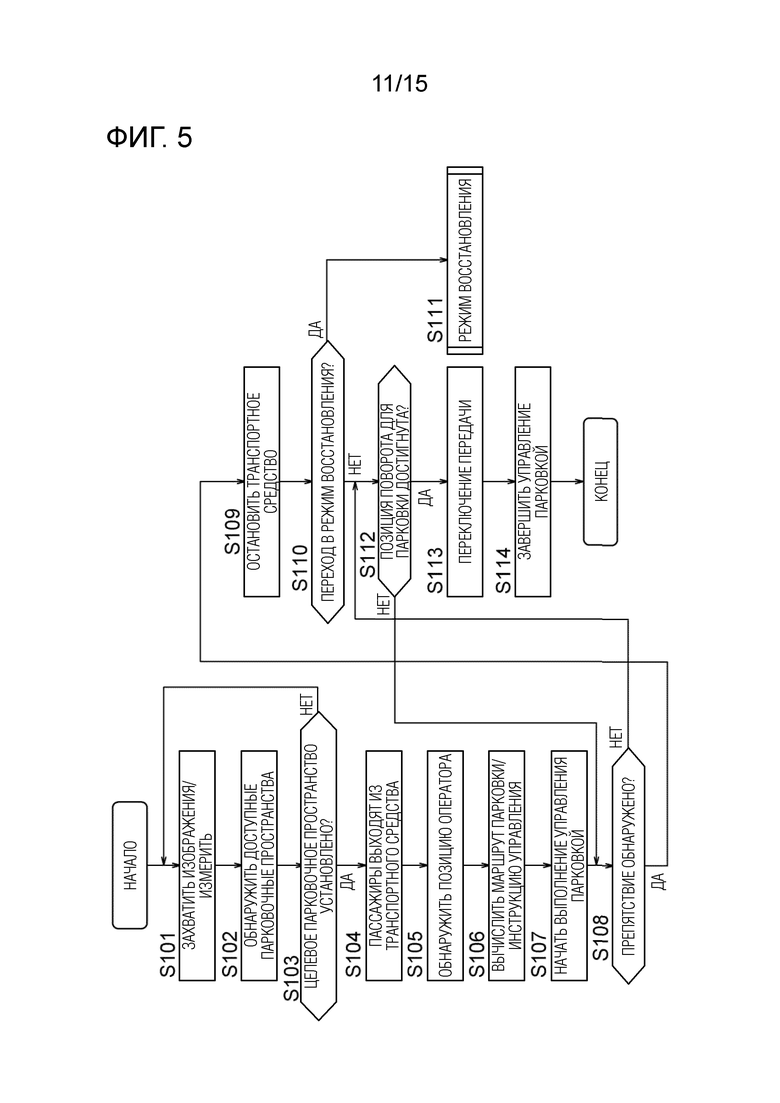
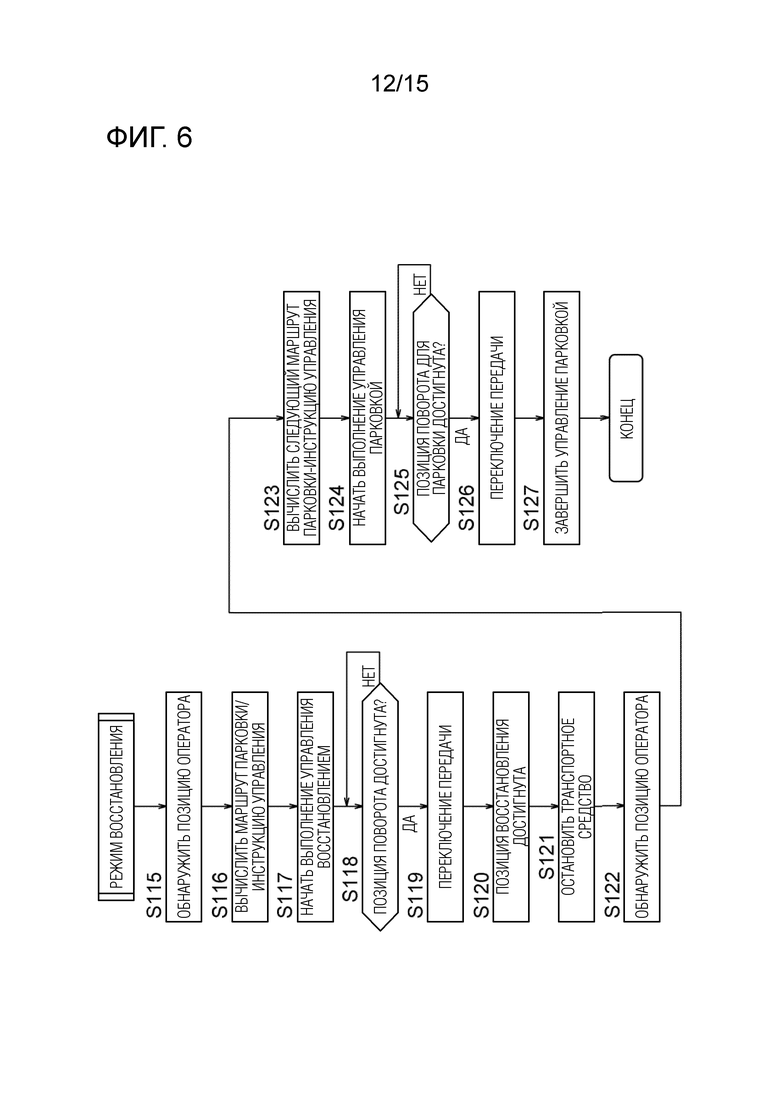
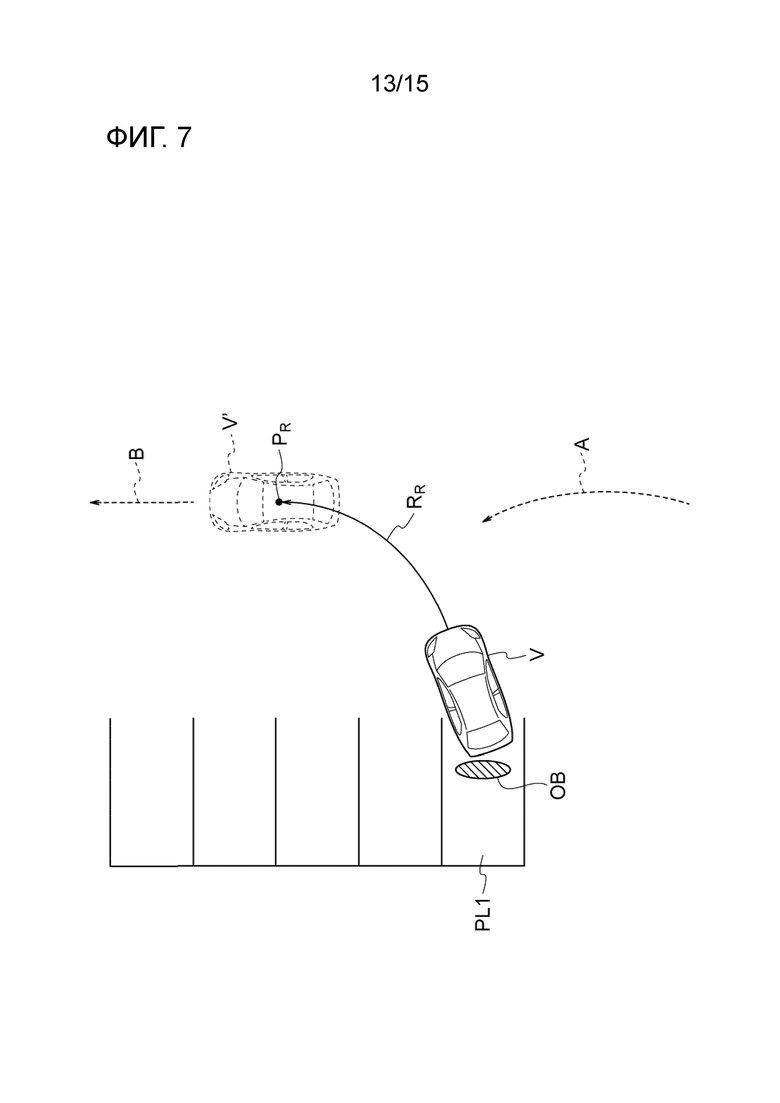
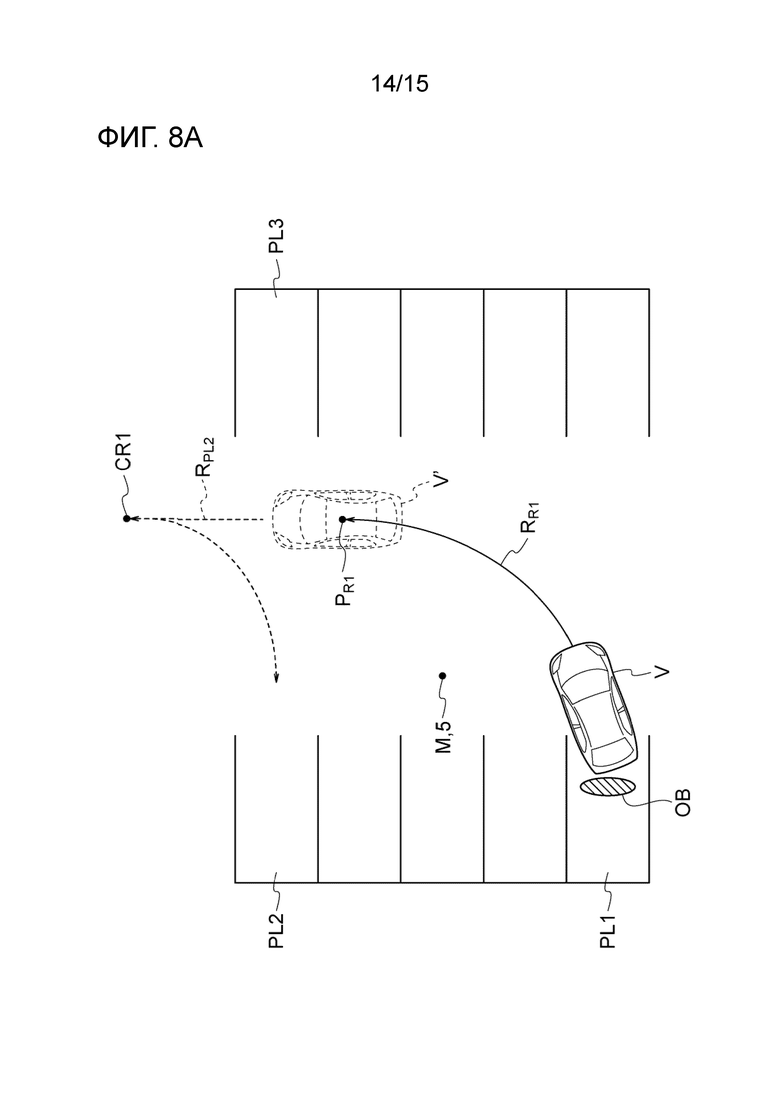
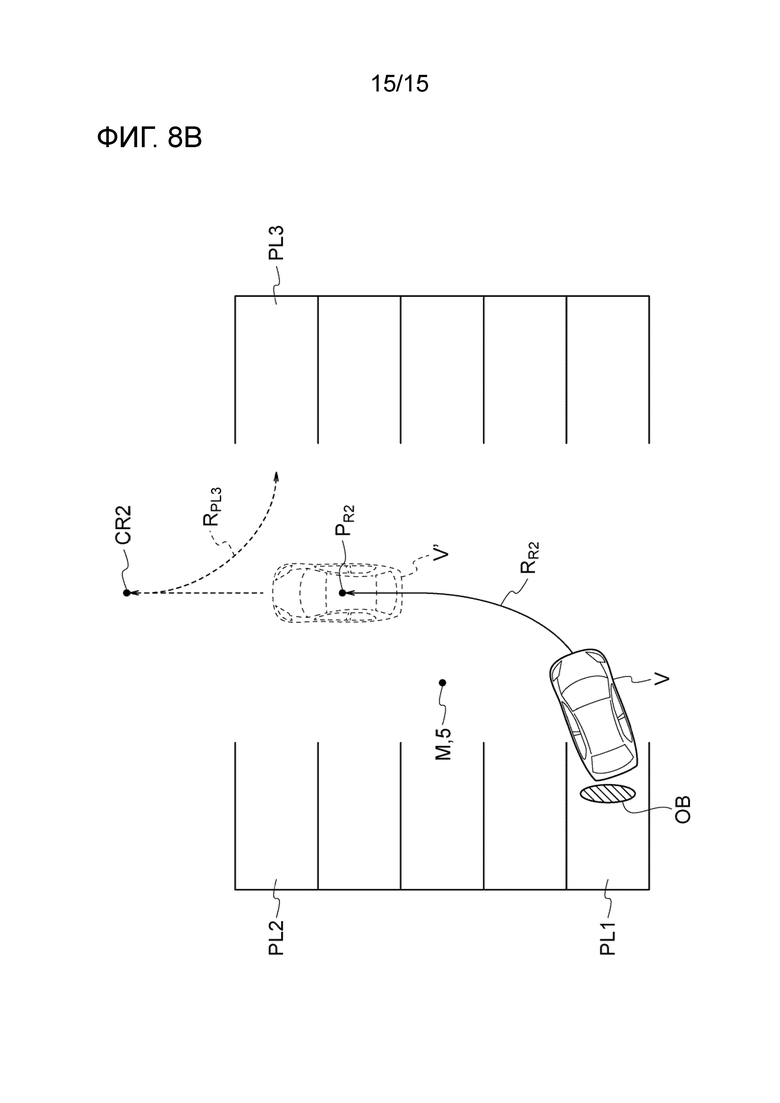
Предложен способ управления парковкой. Выполняют управление парковкой для передвижения транспортного средства в целевую позицию парковки на основе рабочей команды, полученной от оператора, расположенного вне транспортного средства. Когда управление парковкой в целевую позицию парковки приостановлено, и транспортное средство покидает целевую позицию парковки, вычисляют направление передвижения транспортного средства на основе направления парковки, когда транспортное средство припарковано в следующей целевой позиции парковки. Передвигают транспортное средство в упомянутом направлении передвижения. Предложена также аппаратура управления парковкой. Достигается уменьшение нагрузки, налагаемой на оператора. 2 н. и 9 з.п. ф-лы, 15 ил.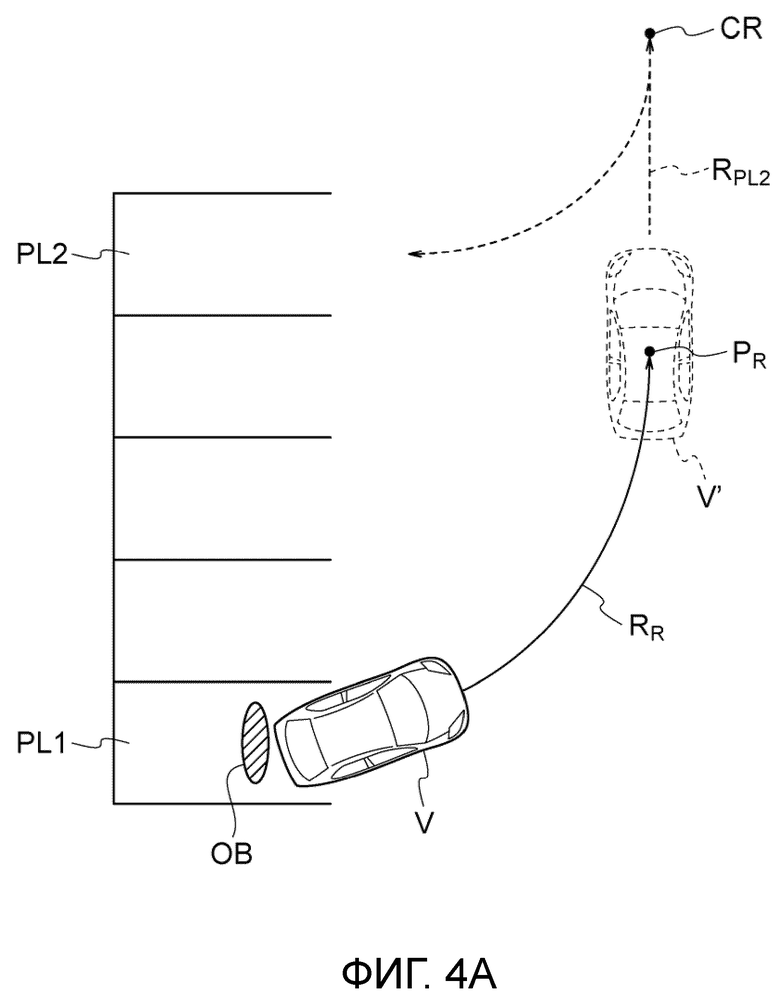
1. Способ управления парковкой, содержащий этапы, на которых:
выполняют управление парковкой для передвижения транспортного средства в целевую позицию парковки на основе рабочей команды, полученной от оператора, расположенного вне транспортного средства;
когда управление парковкой в целевую позицию парковки приостановлено, и транспортное средство покидает целевую позицию парковки, вычисляют направление передвижения транспортного средства на основе направления парковки, когда транспортное средство припарковано в следующей целевой позиции парковки; а также
передвигают транспортное средство в упомянутом направлении передвижения.
2. Способ управления парковкой по п. 1, содержащий этапы, на которых:
задают следующую целевую позицию парковки;
вычисляют целевую позицию, к которой движется транспортное средство, на основе следующей целевой позиции парковки; и
передвигают транспортное средство в целевую позицию.
3. Способ управления парковкой по п.2, содержащий этап, на котором
вычисляют в качестве целевой позиции позицию, в которой транспортное средство начинает управление парковкой к следующей целевой позиции парковки.
4. Способ управления парковкой по любому из пп. 1-3, содержащий этапы, на которых:
задают маршрут парковки для транспортного средства для парковки на следующей целевой позиции парковки; и
задают направление парковки от направления вдоль маршрута парковки.
5. Способ управления парковкой по п. 4, содержащий этап, на котором
задают направление парковки от направления к следующей целевой позиции парковки из целевой позиции парковки.
6. Способ управления парковкой по любому из пп. 1-5, содержащий этап, на котором:
задают маршрут парковки для транспортного средства для парковки на следующей целевой позиции парковки; и
когда маршрут парковки включает в себя позицию поворота для парковки, в которой транспортное средство поворачивает для парковки, задают направление парковки от направления к следующей целевой позиции парковки от позиции поворота для парковки.
7. Способ управления парковкой по любому из пп.1-6, содержащий этап, на котором
задают направление парковки на основе следующей целевой позиции парковки и направления транспортного средства в позиции, в которой управление парковкой к целевой позиции парковки приостановлено.
8. Способ управления парковкой по любому из пп. 1-7, содержащий этап, на котором:
когда следующая целевая позиция парковки не задана, вычисляют в качестве направления передвижения направление, в котором транспортное средство может передвигаться, причем это направление является направлением к направлению, в котором транспортное средство не перемещалось до начала управления парковкой к целевой позиции парковки.
9. Способ управления парковкой по любому из пп. 1-8, содержащий этапы, на которых:
задают позицию оператора; и
выбирают из одного или нескольких кандидатов на следующую целевую позицию парковки кандидата, наблюдаемого от оператора, в качестве следующей целевой позиции парковки.
10. Способ управления парковкой по любому из пп. 2-9, содержащий этап, на котором:
вычисляют в качестве маршрута эвакуации маршрут для транспортного средства для передвижения в целевую позицию парковки из позиции, в которой управление парковкой в целевую позицию парковки приостановлено; и
передвигают транспортное средство по упомянутому маршруту эвакуации.
11. Аппаратура управления парковкой, содержащая устройство управления, сконфигурированное для выполнения управления парковкой при передвижении транспортного средства в целевую позицию парковки на основе рабочей команды, полученной от оператора, расположенного вне транспортного средства,
причем устройство управления эксплуатируется для:
когда управление парковкой в целевую позицию парковки приостановлено, и транспортное средство покидает целевую позицию парковки, вычисления направления передвижения транспортного средства на основе направления парковки, когда транспортное средство припарковано в следующей целевой позиции парковки; и
передвижения транспортного средства в упомянутом направлении передвижения.
| JP 2011008385 A, 13.01.2011 | |||
| JP 2016099953 A, 30.05.2016 | |||
| JP 2015081022 A, 27.04.2015. |

