Область техники
[0001] Настоящее изобретение относится к способу управления парковкой и устройству управления парковкой.
Уровень техники
[0002] Известен метод, в котором, при парковке транспортного средства на парковочном месте под управлением извне транспортного средства, транспортным средством управляют так, чтобы совершать остановку, если обнаружен объект вокруг транспортного средства (патентный документ 1).
Документ уровня техники
Патентный документ
[0003] Патентный документ 1: JP2008-074296A
Сущность изобретения
Проблемы, решаемые изобретением
[0004] Когда объект обнаружен на выделенном парковочном месте, таком как гараж, и транспортным средством управляют, совершая остановку, пользователь может не иметь возможности войти в парковочное место.
[0005] Задача, решаемая настоящим изобретением, состоит в том, чтобы обеспечить проход, через который пользователь может войти в парковочное место, даже при обнаружении объекта в парковочном месте.
Средства для решения проблем
[0006] Настоящее изобретение решает вышеупомянутую проблему, когда выполнение первой инструкции управления для перемещения транспортного средства в целевое парковочное место приостанавливается или отменяется, вычисляя второй маршрут для того, чтобы оставить транспортное средство с заданным или большим расстоянием от объекта, обнаруженного вокруг транспортного средства, и вынуждая управляющее устройство выполнить вторую инструкцию управления для перемещения транспортного средства по второму маршруту.
Эффект изобретения
[0007] Согласно настоящему изобретению, даже когда транспортным средством управляют, совершая остановку в парковочном месте, пользователь может войти в парковочное место.
Краткое описание чертежей
[0008] ФИГ. 1 – блок-схема, иллюстрирующая пример системы управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
ФИГ. 2А – рисунок для описания первой схемы обнаружения положения оператора.
ФИГ. 2B – рисунок для описания второй схемы обнаружения положения оператора.
ФИГ. 2C – рисунок для описания третьей схемы обнаружения положения оператора.
ФИГ. 2D – рисунок для описания четвертой схемы обнаружения положения оператора.
ФИГ. 3А – рисунок для описания первой схемы обнаружения объекта.
ФИГ. 3B – рисунок для описания второй схемы обнаружения объекта.
ФИГ. 4 – блок-схема последовательности операций, иллюстрирующая пример процедуры управления, выполняемой системой управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
ФИГ. 5 – рисунок, иллюстрирующий пример целевого парковочного места.
ФИГ. 6А – рисунок для описания состояния, в котором выполнение первого управления отменено, и транспортное средство совершает остановку.
ФИГ. 6B – первый рисунок для описания состояния, в котором выполнение второго управления завершено.
ФИГ. 6C – второй рисунок для описания состояния, в котором выполнение второго управления завершено.
ФИГ. 7А – рисунок для описания состояния, в котором выполнение первого управления отменено, и транспортное средство совершает остановку.
ФИГ. 7B – рисунок для описания состояния, в котором выполнение второго управления завершено.
ФИГ. 8А – рисунок для описания состояния, в котором выполнение первого управления отменено, и транспортное средство совершает остановку.
ФИГ. 8B – первый рисунок для описания состояния, в котором выполнение второго управления завершено.
ФИГ. 8C – второй рисунок для описания состояния, в котором выполнение второго управления завершено.
ФИГ. 9 – рисунок для описания состояния, в котором выполнение первого управления отменено, и транспортное средство совершает остановку, и состояния, в котором выполнение второго управления завершено.
ФИГ. 10 – рисунок для описания состояния, в котором выполнение первого управления отменено, и транспортное средство совершает остановку, и состояния, в котором выполнение второго управления завершено.
ФИГ. 11 – рисунок для описания примера отображаемой информации на операционном терминале, несомом оператором.
Вариант(ы) осуществления настоящего изобретения
[0009] Далее один или более вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В вариантах осуществления настоящее изобретение будет описано на примере случая, в котором устройство управления парковкой в соответствии с настоящим изобретением применяется в системе управления парковкой. Устройство управления парковкой также может быть применено в портативном операционном терминале (аппарате, таком как смартфон или КПК – карманный персональный компьютер), способном обмениваться информацией с бортовым оборудованием. Способ управления парковкой в соответствии с настоящим изобретением может быть использован в устройстве управления парковкой, которое будет описано ниже.
[0010] На ФИГ. 1 показана блок-схема системы 1000 управления парковкой, включающей в себя устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя камеры 1a-1d, дальномерные устройства 2, информационный сервер 3, операционный терминал 5, устройство 100 управления парковкой, контроллер 70 транспортного средства, систему 40 привода, датчик 50 угла поворота руля, датчик 60 скорости транспортного средства и датчик 80 сидения.
[0011] Устройство 100 управления парковкой согласно одному или более вариантам осуществления настоящего изобретения вынуждает управляющее устройство (ECU: блок управления двигателем) транспортного средства выполнять первую инструкцию управления (инструкцию по управлению парковкой) для перемещения транспортного средства в качестве цели управления по первому маршруту к целевому парковочному месту (парковке) на основе рабочей команды, полученной от оператора. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения управляет операцией перемещения (парковки) транспортного средства V в качестве цели управления в целевое парковочное место на основе рабочей команды, которая вводится с операционного терминала 5. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения управляет операцией перемещения транспортного средства V так, чтобы вынудить транспортное средство V оставить целевое парковочное место (так, чтобы отделить транспортное средство V от целевого парковочного места), (так что транспортное средство V находится/становится отдаленным от целевого парковочного места) (так, что транспортное средство V уезжает с целевого парковочного места), на основе рабочей команды, которая вводится в операционный терминал 5 оператором M, находящимся вне транспортного средства. Один или более вариантов осуществления настоящего изобретения будут описаны со ссылкой на примерный случай, в котором оператор М находится вне транспортного средства, но оператор М может находиться внутри салона транспортного средства V. В ином случае находящиеся в транспортном средстве лица, включая водителя, могут находиться внутри салона транспортного средства, а оператор М (например, управляющий парковкой) может находиться вне транспортного средства.
[0012] Операционный терминал 5 представляет собой портативный компьютер, который может быть вынесен наружу из транспортного средства V и имеет функцию ввода и функцию связи. Операционный терминал 5 принимает сделанный оператором M ввод рабочей команды для управления вождением (работой) транспортного средства V для парковки. Вождение включает в себя операции парковки (операции въезда на парковочное место и выезда из парковочного места). Оператор М вводит инструкции через операционный терминал 5. Эти инструкции включают в себя рабочую команду на выполнение парковки. Рабочая команда включает в себя информацию о выполнении/прекращении управления парковкой, выборе/изменении целевого положения парковки и выборе/изменении маршрута парковки и другую необходимую для парковки информацию. Оператор M также может заставить устройство 100 управления парковкой распознавать инструкции, включающие в себя рабочую команду, без использования операционного терминала 5, например, жестом оператора M (то есть оператор M может вводить такие инструкции в устройство 100 управления парковкой без использования операционного терминала 5, например, жестом). Примеры рабочих команд, которые вводятся оператором М через операционный терминал 5, включают в себя не только рабочую команду на выполнение парковки, но и команду на покидание для того, чтобы транспортное средство оставило целевое парковочное место.
[0013] Операционный терминал 5 включает в себя устройство связи и способен обмениваться информацией с устройством 100 управления парковкой и информационным сервером 3. Операционный терминал 5 передает рабочую команду, которая вводится вне транспортного средства, на устройство 100 управления парковкой через сеть связи и вводит эту рабочую команду в устройство 100 управления парковкой. Операционный терминал 5 связывается с устройством 100 управления парковкой, используя сигналы, включающие в себя уникальный идентификационный номер. Операционный терминал 5 включает в себя дисплей 53. Дисплей 53 предоставляет интерфейс ввода и различные элементы информации. Когда дисплей 53 является дисплеем с сенсорной панелью, он имеет функцию приема рабочей команды. Операционный терминал 5 может быть портативным аппаратом, таким как смартфон или карманный персональный компьютер (КПК), в котором установлены приложения для приема ввода рабочей команды, используемой в способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и передачи рабочей команды на устройство 100 управления парковкой.
[0014] Информационный сервер 3 является устройством предоставления информации, предусмотренным в сети, способной обеспечивать связь. Информационный сервер 3 включает в себя устройство 31 связи и запоминающее устройство 32. Запоминающее устройство 32 включает в себя читаемую картографическую информацию 33, информацию 34 о парковке и информацию 35 об объекте. Устройство 100 управления парковкой и операционный терминал 5 может осуществлять доступ к запоминающему устройству 32 информационного сервера 3 для получения каждого элемента информации.
[0015] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя управляющее устройство 10, устройство 20 ввода и устройство 30 вывода. Эти компоненты устройства 100 управления парковкой соединены друг с другом через местную контроллерную сеть (CAN) или другую бортовую локальную сеть (LAN) для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает рабочую команду, переданную от внешнего операционного терминала 5, и вводит рабочую команду в устройство 20 ввода. Субъектом, который вводит рабочую команду во внешний операционный терминал 5, может быть человек (пользователь, пассажир, водитель или работник парковочного объекта). Устройство 20 ввода передает принятую рабочую команду на управляющее устройство 10. Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода уведомляет водителя об информации управления парковкой. Дисплей 31 в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой дисплей с сенсорной панелью, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит в качестве устройства 20 ввода. Даже когда транспортное средство V управляется на основе рабочей команды, которая вводится с операционного терминала 5, находящееся в транспортном средстве лицо (водитель или пассажир) может вводить рабочую команду, такую как команда на аварийную останову, через устройство 20 ввода.
[0016] Управляющее устройство 10 устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой компьютер для управления парковкой, включающий в себя постоянное запоминающее устройство (ПЗУ) 12, в котором хранится программа управления парковкой, центральный процессор (ЦП) 11 в качестве операционной схемы, которая исполняет сохраненную в ПЗУ 12 программу для того, чтобы служить в качестве устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и оперативное запоминающее устройство (ОЗУ) 13, которое служит в качестве доступного запоминающего устройства.
[0017] Программа управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя команды для выполнения процесса, вынуждающего управляющее устройство транспортного средства выполнять первую инструкцию управления для перемещения транспортного средства по первому маршруту в целевое парковочное место, на основание рабочей команды, полученной от оператора, и процесса, когда выполнение первой инструкции управления приостанавливается или отменяется, вычисления второго маршрута для того, чтобы оставить транспортное средство с заданным или большим расстоянием от объекта, обнаруженного вокруг транспортного средства, и вынуждения управляющего устройства транспортного средства выполнять вторую инструкцию управления для перемещения транспортного средства по второму маршруту.
[0018] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения является устройством с дистанционным управлением, которое принимает рабочую команду от операционного терминала 5 и управляет движением транспортного средства V для парковки транспортного средства V в некое данное парковочное место. Находившееся в транспортном средстве лицо, которое управляет операционным терминалом 5, может находиться снаружи салона транспортного средства или может также находиться внутри салона транспортного средства.
[0019] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения может быть автономного (автоматизированного) типа управления, в котором операция руления и операция ускорения/торможения выполняются автономным (автоматическим) образом. Устройство 100 управления парковкой также может быть полуавтономного (полуавтоматического) типа, в котором операция руления выполняется автономно, в то время как водитель выполняет операцию ускорения/торможения. В программе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения пользователь может произвольно выбирать целевое положение парковки, или же устройство управления парковкой или сторона парковочного объекта могут автоматически устанавливать целевое положение парковки.
[0020] Управляющее устройство 10 устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функции выполнения первого процесса управления перемещением транспортного средства по первому маршруту к целевому парковочному месту, процесса определения, в котором определяют, действительно ли выполнение первого процесса управления приостановлено или отменено, и второго процесса управления, в котором, когда выполнение первой инструкции управления приостановлено или отменено, вычисляют второй маршрут для того, чтобы транспортное средство оставалось с заданным или большим расстоянием от объекта, обнаруженного вокруг транспортного средства, и выполняют второй процесс управления перемещением транспортного средства по второму маршруту. Каждый из вышеупомянутых процессов выполняют посредством взаимодействия программного обеспечения для реализации процесса и вышеописанного аппаратного обеспечения.
[0021] Некоторые процессы обнаружения положения оператора М будут описаны со ссылкой на фиг. 2А-2D. Управляющее устройство 10 получает положение оператора М. Положение оператора М используется для расчета места покидания. Положение оператора M включает в себя информацию о положении на плоскости движения транспортного средства V. Положение оператора M включает в себя информацию о положении по высоте. Положение оператора M может быть обнаружено на основе датчиковых сигналов от датчиков, предусмотренных в транспортном средстве V, или также может быть получено путем обнаружения положения операционного терминала 5, переносимого оператором M, и вычисления положения оператора M на основании положения операционного терминала 5. Операционный терминал 5 может быть предусмотрен в заданном положении или может также переноситься оператором М. Когда операционный терминал 5 предусмотрен в заданном положении, оператор М приходит в положение, в котором предусмотрен операционный терминал 5, и использует операционный терминал 5 в этом положении. В таких случаях положение операционного терминала 5 может использоваться как положение оператора М. В некоторых случаях находящиеся в транспортном средстве лица, включая оператора М, могут находиться внутри салона транспортного средства. Датчик 80 сидения обнаруживает, что находящееся в транспортном средстве лицо находится внутри салона транспортного средства. Датчик 80 сидения может обнаруживать положение, в котором сидит находящееся в транспортном средстве лицо (различие между водительским сиденьем и передним пассажирским сиденьем, различие между правой стороной и левой стороной). Используемым датчиком 80 сидения может быть любой из таких датчиков, имеющий конструкцию, известную на момент подачи настоящей заявки.
[0022] Как показано на фиг. 2А, положение оператора М обнаруживается на основе результатов обнаружения от множественных дальномерных устройств 2, предусмотренных в транспортном средстве, и/или изображений, снятых камерами 1. Положение оператора М может быть обнаружено на основе изображений, снятых камерами 1a-1d. Каждое используемое дальномерное устройство 2 может быть радиолокационным устройством (радаром), таким как радар миллиметрового диапазона, лазерный радар или ультразвуковой радар или звуковой локатор (сонар). Множественные дальномерные устройства 2 и их результаты обнаружения могут быть идентифицированы, и поэтому двумерное положение и/или трехмерное положение оператора M могут быть обнаружены на основе результатов обнаружения. Дальномерные устройства 2 могут быть предусмотрены в тех же положениях, что и камеры 1a-1d, или же могут быть предусмотрены в иных положениях. Управляющее устройство 10 также может обнаруживать жест оператора M на основе изображений, снятых камерами 1a-1d, и идентифицировать рабочую команду, связанную с признаками изображения жеста.
[0023] Как показано на фиг. 2B, положение операционного терминала 5 или оператора M, несущего операционный терминал 5, также может быть обнаружено на основе радиоволн связи между множественными антеннами 211, предусмотренными в разных положениях транспортного средства V и операционного терминала 5. Когда множественные антенны 211 обмениваются данными с одним операционным терминалом 5, интенсивность радиоволны, принимаемой каждой антенной 211, отличается. Положение операционного терминала 5 может быть рассчитано на основе разности интенсивности между принятыми радиоволнами антенн 211. Двумерное положение и/или трехмерное положение операционного терминала 5 или оператора М может быть вычислено исходя из разности интенсивности между принятыми радиоволнами антенн 211.
[0024] Как показано на фиг. 2C, заданное положение (направление/расстояние: D1, D2) относительно водительского сиденья DS транспортного средства V может быть предварительно обозначено как рабочее положение оператора M или как положение, в котором расположен операционный терминал 5. Например, когда оператор М временно останавливает транспортное средство V в назначенном положении и выходит из транспортного средства V, чтобы задействовать операционный терминал 5, предусмотренный в заданном положении, возможно вычислить начальное положение оператора М относительно транспортного средства V или начальное положение терминала 5, который переносится оператором М, относительно транспортного средства V.
[0025] Как показано на фиг. 2D аналогичным образом, информация изображения, представляющая рабочее положение (положение, в котором стоит оператор M: положение работы) относительно транспортного средства V, отображается на дисплее 53 операционного терминала 5. Это управление отображением может выполняться приложением, установленным на стороне операционного терминала 5, или же может выполняться на основе команды от управляющего устройства 10.
[0026] Процесс обнаружения объекта будет описан со ссылкой на фиг. 3А и 3В. В одном или более вариантах осуществления настоящего изобретения «объекты» включают в себя конструкции, такие как стены и столбы парковки (стоянки), установки вокруг транспортного средства, пешеходы, другие транспортные средства, припаркованные транспортные средства и т.д. Как показано на фиг. 3А, объект обнаруживается на основе результатов обнаружения от множественных дальномерных устройств 2, предусмотренных в транспортном средстве V, и/или изображений, снятых камерами 1. Дальномерные устройства 2 обнаруживают наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта на основе принятых сигналов от радаров. Дополнительно или альтернативно, наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта могут быть обнаружены на основе изображений, снятых камерами 1a-1d. Обнаружение объекта может быть выполнено с использованием стереоскопического метода движения с камерами 1a-1d. Результаты обнаружения используются для определения того, является ли парковочное место пустым (припарковано ли или нет транспортное средство на парковочном месте).
[0027] Как показано на фиг. 3B, объекты, включая конструкции, такие как стены и столбы парковки, могут быть обнаружены на основе информации 34 о парковке, полученной из запоминающего устройства 32 информационного сервера 3. Информация о парковке включает в себя местоположение и идентификационный номер каждой парковки, а также информацию о местоположении проходов, столбов, стен, мест для хранения и т. д. на парковочном объекте. Информационным сервером 3 может управлять персонал парковки.
[0028] Процедура управления для управления парковкой будет описана ниже со ссылкой на блок-схему, показанную на фиг. 4. На ФИГ. 4 показана блок-схема последовательности операций, иллюстрирующая процедуру управления процесса управления парковкой, выполняемого системой 1000 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения. Триггер для запуска процесса управления парковкой конкретно не ограничен, и процесс управления парковкой может быть инициирован с помощью включения пускового переключателя устройства 100 управления парковкой.
[0029] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функцию автономного перемещения транспортного средства V к парковочному месту на основе рабочей команды, полученной извне транспортного средства.
[0030] На этапе 101 управляющее устройство 10 устройства 100 управления парковкой получает информацию вокруг транспортного средства в заданном цикле. Процесс получения сигналов дальности и процесс получения захваченных изображений могут выполняться выборочно. Управляющее устройство 10 получает, по мере необходимости, сигналы дальности от дальномерных устройств 2, которые прикреплены к множественным местам транспортного средства V. Управляющее устройство 10 получает, по мере необходимости, изображения, которые снимаются камерами 1a-1d, прикрепленными к множественным местам транспортного средства V. Хотя это и не ограничено особым образом, камера 1a расположена на передней решетке транспортного средства V, камера 1d расположена вблизи заднего бампера, а камеры 1b и 1c расположены на нижних частях правого и левого зеркал заднего вида. В качестве каждой из камер 1a-1d может использоваться камера, имеющая широкоугольный объектив с широким углом обзора. Камеры 1a-1d захватывают изображения пограничных линий парковочных мест вокруг транспортного средства V и объектов, существующих вокруг парковочных мест. Камеры 1a-1d могут быть ПЗС-камерами, инфракрасными камерами или другими соответствующими приборами формирования изображений.
[0031] На этапе 102 управляющее устройство 10 обнаруживает парковочные места, на которые возможна парковка. Управляющее устройство 10 обнаруживает разметку (зоны) парковочных мест на основе снятых камерами 1a-1d изображений. Управляющее устройство 10 обнаруживает пустые парковочные места, используя данные обнаружения от дальномерных устройств 2 и данные обнаружения, извлеченные из снятых изображений. Управляющее устройство 10 обнаруживает доступные парковочные места среди парковочных мест. Доступные парковочные места - это те парковочные места, которые пусты (т. е. где не припаркованы другие транспортные средства) и к которым можно рассчитать маршруты для совершения парковки. Целевое парковочное место для парковки транспортного средства указывается из числа доступных парковочных мест. В одном или более вариантах осуществления настоящего изобретения условие, что маршрут парковки может быть рассчитан, означает, что траектория маршрута от текущего положения до целевого положения парковки может быть воспроизведена по координатам поверхности дороги без помех со стороны объектов (включая припаркованные транспортные средства).
[0032] На этапе 103 управляющее устройство 10 передает доступные парковочные места на операционный терминал 5, управляет дисплеем 53 для отображения доступных парковочных мест и запрашивает оператора M ввести информацию о выборе целевого положения парковки при парковке транспортного средства V. Целевое положение парковки может быть автоматически выбрано управляющим устройством 10 или стороной парковочного объекта. Когда рабочая команда указания парковочного места вводится в операционный терминал 5, парковочное место устанавливается в качестве целевого положения парковки.
[0033] На этапе 104 управляющее устройство 10 обнаруживает объект с использованием ранее описанной схемы. Объекты включают пешеходов, дорожные знаки, дорожные конструкции, грузы, подвижные объекты, конструкции, которые образуют парковочные места, бордюрные камни, которые разделяют парковочные места, и т. д. Конструкциями, которые образуют парковочные места, являются здания, которые представляют собой гаражи, навесы для автомобилей и тому подобное. Обнаружение объектов включает в себя обнаружение препятствий, которые препятствуют выполнению управления парковкой.
[0034] На этапе 105 управляющее устройство 10 вычисляет первый маршрут к целевому парковочному месту. Любая схема, известная на момент подачи настоящей заявки, может использоваться для процесса вычисления первого маршрута к целевому парковочному месту.
[0035] На этапе 106 управляющее устройство 10 генерирует первую инструкцию управления для перемещения транспортного средства V по вычисленному первому маршруту. Управляющее устройство 10 предварительно хранит информацию о технических характеристиках транспортного средства V, необходимую для инструкции управления. Примеры первой инструкции управления включают в себя инструкции по эксплуатации в отношении величины поворота руля, скорости поворота руля, ускорения поворота руля, положения переключения передач, скорости (включая нулевую), ускорения и замедления транспортного средства V, которые связаны с моментом времени или положением при движении транспортного средства V по маршруту парковки, и другие инструкции по эксплуатации. Первая инструкция управления включает в себя время выполнения или положение выполнения вышеупомянутой инструкции по эксплуатации транспортного средства V. Инструкция, касающаяся маршрута парковки, и инструкция по эксплуатации, связанная с маршрутом парковки, выполняются транспортным средством V, и поэтому транспортное средство V может быть перемещено (припарковано) в целевое положение парковки.
[0036] На этапе 107 управляющее устройство 10 принимает ввод команды/инструкции на выполнение первой инструкции управления от оператора М. Когда команда/инструкция на выполнение введена, процесс переходит к этапу 108, на котором начинается выполнение первой инструкции управления. Команда/инструкция на выполнение может быть вводом в переключатель автоблокировки операционного терминала 5. Переключатель автоблокировки представляет собой переключатель, имеющий функцию продолжения выполнения процесса управления парковкой только тогда, когда оператор М прикладывает усилие к переключателю, и функцию приостановки или отмены выполнения процесса управления парковкой, когда приложенное к переключателю усилие снимается. Пока на переключатель автоблокировки операционного терминала 5 нажимают и/или его касаются, процесс управления парковкой выполняется непрерывно.
[0037] На этапе 109 управляющее устройство 10 определяет, можно ли продолжить первое управление и следует ли приостановить/отменить выполнение первого управления. Управляющее устройство 10 определяет, может ли транспортное средство двигаться к целевому парковочному месту. Когда начинается выполнение первого управления, управляющее устройство 10 получает информацию об обнаружении окружающего объекта (препятствия) в заданном цикле и определяет, может ли транспортное средство V1 двигаться по первому маршруту. Когда выполнение первого управления начато, управляющее устройство 10 получает информацию об обнаружении целевого парковочного места в заданном цикле и определяет, может ли транспортное средство V1 въехать в целевое парковочное место. Управляющее устройство 10 определяет, может ли транспортное средство V1 двигаться по первому маршруту, не испытывая затруднений из-за существования некоего объекта. Когда движение по первому маршруту невозможно, делается определение, что выполнение первого управления должно быть приостановлено или отменено. Когда управляющее устройство 10 определяет, что выполнение первого управления должно быть приостановлено или отменено, процесс переходит к этапу 110.
[0038] На этапе 110 управляющее устройство 10 вычисляет второй маршрут. Второй маршрут - это маршрут для того, чтобы транспортное средство V1 оставило целевое парковочное место (маршрут для отделения транспортного средства V1 от целевого парковочного места), (маршрут для установления дистанции между транспортным средством V1 и целевым парковочным местом), (маршрут для совершения транспортным средством V1 выезда с целевого парковочного места). Второй маршрут в соответствии с одним или более вариантами осуществления настоящего изобретения используется в режиме «спасения» (режиме возврата) для возвращения/восстановления из состояния, в котором управление парковкой приостановлено или отменено. Режим «спасения» относится к процессу, который выполняют в качестве экстренного предотвращения, когда продолжение процесса управления парковкой затруднено и движение к целевому положению парковки приостановлено/отменено. Режим «спасения» представляет собой процесс перемещения рассматриваемого транспортного средства V1 так, чтобы вынудить рассматриваемое транспортное средство V1 оставить целевое парковочное место (так, чтобы отделить рассматриваемое транспортное средство V1 от целевого парковочного места (так, что рассматриваемое транспортное средство V1 находилось/становилось отдаленным от целевого парковочного места) (так, что рассматриваемое транспортное средство V1 уехало с целевого парковочного места), которое было установлено до выполнения режима «спасения». Управляющее устройство 10 может рассчитывать траекторию для уклонения от объекта, который вызывает прекращение/отмену перемещения к целевому парковочному месту в качестве второго маршрута (маршрута в режиме «спасения»). Как будет понятно, второй маршрут может быть таким же, как и первый маршрут к целевому парковочному месту, и управляющее устройство 10 может изменять на обратное направление движения по маршруту, вычисляя второй маршрут для перемещения транспортного средства V1 в противоположном первому маршруту направлении. Второй маршрут, рассчитанный в режиме «спасения», может быть траекторией перемещения (возвращения) в положение, в котором был начат процесс парковки.
[0039] На этапе 111 управляющее устройство 10 устанавливает место покидания. В одном или более вариантах осуществления настоящего изобретения управляющее устройство 10 может устанавливать место покидания в положении с оставленным заданным или большим расстоянием от объекта и вычислять второй маршрут к установленному месту покидания. Второй маршрут получается после того, как установлено место покидания, и поэтому транспортное средство V1 может быть направлено в положение с оставленным заданным или большим расстоянием от объекта. Заставив транспортное средство V1 остаться с заданным или большим расстоянием от объекта (оставив место покидания с заданным или большим расстоянием от объекта), можно образовать зазор для прохода человека. Для одного места покидания может быть установлено множество зазоров, или же может быть установлен только один зазор. То есть место покидания может быть установлено таким образом, чтобы зазор, равный или больший, чем заданное расстояние, мог быть обеспечен только с правой стороны или с левой стороны от транспортного средства V1, или место покидания может быть установлено так, чтобы зазоры, равные или большие, чем заданное расстояние, могли быть обеспечены как с правой, так и с левой стороны от транспортного средства V1. Заданное расстояние в одном или более вариантах осуществления настоящего изобретения может быть установлено в соответствии с атрибутом объекта OB. Когда объект является конструкцией, заданное расстояние может быть установлено на расстояние, которое позволяет человеку пройти. Расстояние, которое позволяет человеку пройти, может быть установлено равным от 40 см до 70 см, от 50 см до 65 см, а предпочтительно 60 см.
[0040] «Заданное расстояние» между объектом и местом покидания (положением, в котором находится транспортное средство V1 после первого управления) может быть определено как расстояние между объектом и открывающейся частью транспортного средства V1. Примеры открывающейся части включают боковую открывающуюся часть, предусмотренную на стороне (сбоку) транспортного средства V1, и заднюю открывающуюся часть, предусмотренную сзади транспортного средства. Примеры боковой открывающейся части включают в себя боковую дверь тягового типа и боковую дверь сдвигаемого типа. Заданное расстояние может быть установлено на некоторое значение расстояния в соответствии с размером и/или диапазоном перемещения (максимальным расстоянием во время открывания) каждой боковой двери транспортного средства V1. Различные заданные расстояния могут быть установлены для транспортного средства V1 с дверьми тягового типа и транспортного средства V1 с дверьми сдвигаемого типа. Что касается заданного расстояния для боковой открывающейся части транспортного средства V1, то расстояние для правой боковой открывающейся части и расстояние для левой боковой открывающей части могут быть разными значениями. «Заданное расстояние» между объектом и местом покидания (или открывающейся частью) может быть установлено в соответствии с пространством, требуемым находящемуся в транспортном средстве лицу, чтобы открыть дверь и сесть в транспортное средство V1. Пространство, необходимое для посадки в транспортное средство, может быть задано в соответствии с типом транспортного средства и сохранено в запоминающем устройстве 132, чтобы быть считываемым.
[0041] Задняя открывающаяся часть – это дверь багажника или дверь хэтчбека. Примеры задней открывающейся части включают заднюю дверь тягового типа и дверь люкового типа. Заданное расстояние может быть установлено на значение расстояния в соответствии с размером и/или диапазоном перемещения (максимальным расстоянием во время открывания) каждой задней двери транспортного средства V1. Различные заданные расстояния могут быть установлены для транспортного средства V1 с дверьми тягового типа и транспортного средства V1 с дверью люкового типа. Заданное расстояние между объектом и открывающейся частью может быть установлено в соответствии с пространством, необходимым находящемуся в транспортном средстве лицу, чтобы войти в пространство между задней дверью (открывающейся частью) и объектом и открыть заднюю дверь, чтобы вынуть багаж из багажника или с заднего сиденья. Пространство, необходимое для манипулирования багажом в багажнике или на заднем сиденье, может быть задано в соответствии с типом транспортного средства и сохранено в запоминающем устройстве 132, чтобы быть считываемым. Что касается задней двери, то различные заданные расстояния могут быть установлены для транспортного средства V1 с багажником и транспортного средства V1 типа хэтчбек.
[0042] Когда может устанавливаться множество кандидатов на место покидания, место покидания может быть установлено таким образом, чтобы можно было обеспечить наибольшее заданное расстояние (зазор, имеющий наибольшую ширину, самый широкий зазор), или место покидания также может быть установлено на ближайшее к оператору М положение. Положение оператора М можно получить с помощью ранее описанной схемы. Когда может быть задано множество кандидатов на место покидания, может быть выбрано и установлено место покидания, наиболее близкое к положению находящегося в транспортном средстве лица, обнаруженному датчиком 80 сидения. Когда находящееся в транспортном средстве лицо сидит на водительском сиденьи, место покидания может быть установлено ближайшим к открывающейся части со стороны водительского сиденья.
[0043] В одном или более вариантах осуществления настоящего изобретения, когда выполнение первой инструкции управления приостанавливается или отменяется, управляющее устройство 10 устанавливает в качестве второго маршрута маршрут для того, чтобы транспортное средство V1 осталось с заданным или большим расстоянием от объекта, обнаруженного вокруг транспортного средства V1. Таким образом, вынуждая транспортное средство V1 остаться с заданным или большим расстоянием от объекта, оператор может проходить через пространство между транспортным средством V1 и объектом.
[0044] Когда транспортное средство паркуется на парковочном месте, окруженном стенами, таком как гараж или навес для автомобиля, выполняемый процесс управления парковкой может быть приостановлен или отменен, если в гараже обнаружен какой-либо объект. В этом случае, если транспортное средство остановлено без достаточного пространства между стеной (объектом) и транспортным средством, оператор М не может войти на парковочное место для подтверждения и перемещения обнаруженного в гараже объекта.
[0045] ФИГ. 5 иллюстрирует пример парковочного места PL, образованного конструкцией ST. Конструкция ST имеет правую стенку WR, левую стенку WL и заднюю стенку WB, и эти стенки ограничивают парковочное место PL. Конструкция ST также образует въезд ET, который является открывающейся частью, открытой наружу. Въезд ET включает в себя конструкции ETPL и ETPR ворот, которые являются правой и левой концевыми частями открывающейся части. Пространство между конструкциями ETPL и ETPR ворот - это открывающаяся часть, через которую въезжает и выезжает транспортное средство. Въезд ET является входным проемом/выходным проемом в/из парковочного места PL. ФИГ. 5 иллюстрирует состояние, в котором транспортное средство V1 припарковано в парковочном месте PL. Транспортное средство V1 оставлено с определенными расстояниями от конструкции ST как объекта. Зазор CLR образован между правой стенкой WR конструкции ST и транспортным средством V1, зазор CLL образован между левой стенкой WL и транспортным средством V1, и зазор CLB образован между задней стенкой WB и транспортное средство V1.
[0046] Гаражи и навесы для автомобилей могут быть использованы в качестве хранилищ, и в них могут храниться товары. Когда происходит приостановка управления парковкой (первого управления) из-за присутствия подвижного объекта, оператор М может переместить (отодвинуть) объект, тем самым обеспечивая возможность снова выполнять управление парковкой (первое управление). Однако, если человек не может зайти на парковочное место, он/она не может удалить объект в первую очередь. Кроме того, если транспортное средство остановлено без достаточного промежутка между стеной (объектом) и транспортным средством, оператор М не может сесть в транспортное средство V1, чтобы самому/самой вести его (выполнить операцию парковки), а также не может вынуть багаж из транспортного средства V1. В процессе управления автономной парковкой необходимо определить, следует ли продолжать управление парковкой с точки зрения обеспечения безопасности, и процесс управления парковкой может быть, конечно, приостановлен или отменен. Вышеуказанные ситуации, то есть ситуации, в которых невозможно войти на парковочное место для того, чтобы забрать объект, сесть в транспортное средство V1 и открыть открывающуюся часть, такую как дверь или багажник транспортного средства V1, когда транспортное средство V1 остановлено из-за приостановки/отмены первого управления, ухудшают оценку удобства и надежности самого устройства управления парковкой, которое выполняет автономную парковку.
[0047] В одном или более вариантах осуществления настоящего изобретения, когда выполнение первой инструкции управления приостановлено или отменено, вычисляют второй маршрут для того, чтобы оставить транспортное средство V1 с заданным или большим расстоянием от объекта, обнаруженного вокруг транспортного средства V1, и, следовательно, возможно предотвратить возникновение ситуации, в которой невозможно войти на парковочное место, сесть в транспортное средство V1 или получить доступ к открывающейся части, такой как дверь или багажник транспортного средства V1, когда транспортное средство V1 остановлено.
[0048] В одном или более вариантах осуществления настоящего изобретения процесс вычисления второго маршрута может выполняться, когда удовлетворяется следующее условие. В частности, когда выполнение первой инструкции управления для транспортного средства V1 приостановлено или отменено в положении, в котором по меньшей мере часть транспортного средства V1 относится к (принадлежит) целевому парковочному месту, управляющее устройство 10 вынуждают выполнять вторую инструкцию управления для передвижения транспортного средства по второму маршруту. Управляющее устройство 10 сравнивает область существования (координаты XY) транспортного средства V1 с областью (координаты XY) целевого парковочного места в тот момент, когда выполнение первой инструкции управления приостановлено или отменено, и когда эти области частично перекрывают друг друга, управляющее устройство 10 вычисляет второй маршрут и выполняет второе управление (режим «спасения»). Когда транспортное средство V1 совершает остановку в положении, в котором по меньшей мере часть транспортного средства V1 принадлежит целевому парковочному месту, очень вероятно попасть в состояние, с которым нельзя справиться, такое как состояние, при котором невозможно войти на парковочное место, сесть в транспортное средство V1 или получить доступ к открывающейся части, такой как дверь или багажник транспортного средства V1, когда транспортное средство V1 остановлено. В одном или более вариантах осуществления настоящего изобретения второй маршрут вычисляют тогда, когда велика вероятность возникновения такого состояния, с которым нельзя справиться, и поэтому возможно предотвратить выполнение второго управления (режим «спасения»), которое не является необходимым в ситуации, с которой нельзя справиться.
[0049] На этапе 112 управляющее устройство 10 генерирует вторую инструкцию управления для перемещения транспортного средства V по вычисленному второму маршруту. Управляющее устройство 10 предварительно хранит информацию о технических характеристиках транспортного средства V, необходимую для инструкции управления. Примеры второй инструкции управления включают в себя инструкции по эксплуатации в отношении величины поворота руля, скорости поворота руля, ускорения поворота руля, положения переключения передач, скорости (включая нулевую), ускорения и замедления транспортного средства V, которые связаны с моментом времени или положением при движении транспортного средства V по маршруту парковки, и другие инструкции по эксплуатации. Вторая инструкция управления включает в себя время выполнения или положение выполнения вышеупомянутой инструкции по эксплуатации транспортного средства V. Инструкция, касающаяся маршрута парковки, и инструкция по эксплуатации, связанная с маршрутом парковки, выполняются транспортным средством V, и поэтому транспортное средство V может быть перемещено (припарковано) в целевое положение парковки. Когда вводится команда на выполнение второго управления, управляющее устройство 10 выполняет процесс перемещения рассматриваемого транспортного средства V1 по второму маршруту для оставления целевого парковочного места (выезда с него). Направление перемещения и расстояние перемещения на траектории оставления целевого парковочного места не ограничены.
[0050] Конкретные примеры управления будут описаны ниже со ссылкой на чертежи. Последующее описание основано на примерном случае, в котором транспортное средство V1 припарковано в парковочном месте PL, показанном на фиг. 5. Как описано выше, когда выполнение первой инструкции управления приостанавливается или отменяется, управляющее устройство 10 вычисляет второй маршрут для того, чтобы оставить транспортное средство V1 с заданным или большим расстоянием от объекта, обнаруженного вокруг транспортного средства V1, и управляет транспортным средством V1 в движении по второму маршруту.
[0051] (1) Управляющее устройство 10 может вычислять второй маршрут для направления транспортного средства V1 в место покидания, в котором конструкция ST (объект) парковочного места остается на заданном или большем расстоянии от транспортного средства V1. ФИГ. 6А – рисунок при рассмотрении сверху состояния, в котором транспортное средство V1 паркуется в целевом парковочном месте PL по первому маршруту RT1. Объект OB присутствует в задней части парковочного места PL, поэтому выполнение первого управления в качестве управления парковкой не может быть продолжено, и транспортное средство V1 управляется, совершая остановку. В это время контрольное положение PV транспортного средства V1 расположено в координатах X0 и Y0. Контрольное положение транспортного средства V1 конкретно не ограничено и устанавливается в заданном положении транспортного средства V1.
[0052] ФИГ. 6B – рисунок при рассмотрении сверху состояния, в котором транспортное средство V1 перемещается по второму маршруту RT2 для оставления транспортным средством V1 целевого парковочного места PL. Второй маршрут рассчитан на направление транспортного средства V1 в место покидания, в котором конструкция ST (объект) парковочного места остается на заданном или большем расстоянии от транспортного средства V1. Контрольное положение PV транспортного средства V1, находящегося в месте покидания после выполнения второго управления, расположено в координатах X1 и Y1. Образуются зазоры CL между находящимся в месте покидания транспортным средством V1 и конструкцией ST. Зазор CLR с правой стороны и зазор CLL с левой стороны, которые образовались в поперечном направлении (направлении по колесной оси) транспортного средства V1, имеют заданное или большее расстояние. Контрольное положение PV транспортного средства V1 расположено в координатах X1 и Y1, когда выполнено второе управление для перемещения транспортного средства V1 в место покидания. По сравнению с положением транспортного средства V1, представленным координатами X0 и Y0, показанными на фиг. 6A, положение транспортного средства V1 смещено в направлении движения транспортного средства по оси X.
[0053] Дополнительно или альтернативно, место покидания может быть установлено таким, чтобы расстояния между заданными положениями транспортного средства V1 и конструкциями ETPL и ETPR ворот, которые образуют въезд в парковочное место PL, были не меньше, чем заданное расстояние, и транспортное средство V1 может быть перемещено в место покидания. Заданные положения транспортного средства V1 конкретно не ограничены, но в этом примере заданные положения устанавливаются на осях поворота дверей. Образуются зазоры между въездом ET парковочного места PL и открывающимися частями транспортного средства V1, и поэтому можно обеспечить путь входа на парковочное место PL.
[0054] В состоянии, в котором первое управление отменено, как показано на фиг. 6A, расстояния между транспортным средством V1 и конструкцией ST невелики, и оператор M не может дойти до дальней стороны парковочного места PL, а также не может подтвердить состояние объекта OB. Напротив, в состоянии, в котором второе управление выполнено, как показано на фиг. 6B, расстояния между транспортным средством V1 и конструкцией ST не меньше заданного расстояния, и оператор M может дойти до дальней стороны парковочного места PL и также может подтвердить состояние объекта OB, поэтому, при необходимости, объект OB может быть удален.
[0055] Зазор CLR с правой стороны и зазор CLL с левой стороны могут быть одинаковым расстоянием или же могут быть разными расстояниями. Управляющее устройство 10 в соответствии с одним или более вариантами осуществления настоящего изобретения обнаруживает положение оператора M и формирует зазор, имеющий заданное или большее расстояние, между конструкцией ST и открывающейся частью, ближайшей к положению оператора M, из множества открывающихся частей транспортного средства V1. Открывающиеся части транспортного средства V1 включают в себя боковые открывающиеся части и заднюю открывающуюся часть. Боковые открывающиеся части – это боковые двери. Примеры задней открывающейся части включают дверь багажника и дверь хэтчбека. В примере, показанном на фиг. 6A и 6B, зазор CLL между левой дверью, ближайшей к оператору M, и конструкцией ST устанавливается в качестве цели управления (которой управляют так, чтобы иметь заданное или большее расстояние). В этом случае ширина зазора CLL может быть установлена большей, чем ширина зазора CLR. Благодаря образованию прохода (зазора) в том месте, через которое оператор М может легко получить доступ к открывающейся части (такой как дверь или багажник), удобство пользователя может быть улучшено. В этом случае значение координаты Y1, проходящее через контрольное положение PV транспортного средства V1, сдвигается в направлении +Y/-Y от центра въезда. Как показано на фиг. 6C, зазоры CLL и CLR могут быть сформированы таким образом, чтобы расстояния между багажной частью (задней открывающейся частью) транспортного средства V1 и конструкциями ETPL и ETPR ворот, которые образуют въезд, составляли не менее заданного расстояния.
[0056] (2) Управляющее устройство 10 может вычислять второй маршрут для направления транспортного средства V1 в место покидания, в котором конструкция ST (объект) парковочного места остается на заданном или большем расстоянии от открывающейся части транспортного средства V1. ФИГ. 7А – рисунок при рассмотрении сверху состояния, в котором транспортное средство V1 припарковано в целевом парковочном месте PL по первому маршруту RT1. Объект OB присутствует в задней части парковочного места PL, поэтому выполнение первого управления в качестве управления парковкой не может быть продолжено, и транспортное средство V1 управляется, совершая остановку. В это время контрольное положение PV транспортного средства V1 находится в координатах X0 и Y0. Контрольное положение транспортного средства V1 конкретно не ограничено и устанавливается в заданном положении транспортного средства V1. Как показано на этой фигуре, расстояния CLL и CLR между конструкцией ST и транспортным средством V1 меньше заданного расстояния, и, следовательно, открывающиеся части не могут быть открыты.
[0057] ФИГ. 7B – рисунок при рассмотрении сверху состояния, в котором транспортное средство V1 перемещается по второму маршруту RT2 для оставления транспортным средством V1 целевого парковочного места PL. Второй маршрут рассчитан на направление транспортного средства V1 в место покидания, в котором конструкция ST (объект) парковочного места остается на заданном или большем расстоянии от открывающихся частей транспортного средства V1. Контрольное положение PV транспортного средства V1, находящегося в месте покидания после выполнения второго управления, расположено в координатах X1 и Y1. Образуются зазоры CL между находящимся в месте покидания транспортным средством V1 и конструкцией ST. Зазор CLR с правой стороны и зазор CLL с левой стороны, которые образовались в поперечном направлении (направлении по колесной оси) транспортного средства V1, имеют заданное или большее расстояние. Дополнительно или альтернативно, место покидания может быть установлено таким, чтобы расстояния между осями поворота дверей транспортного средства V1 и конструкциями ETPL и ETPR ворот, которые образуют въезд в парковочное место PL, составляли не менее заданного расстояния, и транспортное средство V1 может быть перемещено в место покидания. Транспортное средство V1 перемещается в место покидания, тем самым позволяя перемещать правую дверь DR в диапазоне RR, а также перемещать левую дверь DL в диапазоне RL. Зазор CLB сзади, образованный в продольном направлении транспортного средства V1 (направлении по длине транспортного средства), составляет не менее заданного расстояния. Контрольное положение PV транспортного средства V1 расположено в координатах X1 и Y1, когда выполнено второе управление для перемещения транспортного средства V1 в место покидания. По сравнению с положением транспортного средства V1, представленным координатами X0 и Y0, показанными на фиг. 7А, положение транспортного средства V1 смещено в направлении движения транспортного средства по оси X.
[0058] В состоянии, в котором первое управление отменено, как показано на фиг. 7A, расстояния между транспортным средством V1 и конструкцией ST невелики, и оператор M не может открыть двери транспортного средства V1, не может сесть в транспортное средство V1, чтобы вести транспортное средство V1, и не может извлечь багаж из транспортного средства. Напротив, в состоянии, в котором выполнено второе управление, как показано на фиг. 7B, расстояния между транспортным средством V1 и конструкцией ST не меньше заданного расстояния, и оператор M может сесть в транспортное средство V1, чтобы вести транспортное средство V1, может вынуть багаж из транспортного средства и может переместить транспортное средство V1.
[0059] Зазор CLR с правой стороны и зазор CLL с левой стороны могут быть одинаковым расстоянием или же разными расстояниями. Управляющее устройство 10 в соответствии с одним или более вариантами осуществления настоящего изобретения обнаруживает положение оператора M и формирует зазор, имеющий заданное или большее расстояние, между конструкцией ST и открывающейся частью, ближайшей к положению оператора M, из множества открывающихся частей транспортного средства V1.
[0060] Открывающиеся части транспортного средства V1 включают в себя боковые открывающиеся части. Боковые открывающиеся части – это боковые двери. Зазоры CL сформированы таким образом, что объект остается на заданном или большем расстоянии от боковой открывающейся части транспортного средства V1, и поэтому оператор может сесть в транспортное средство V1 от боковой открывающейся части, чтобы вести транспортное средство V1. Открывающиеся части транспортного средства V1 включают в себя заднюю открывающуюся часть. Примеры задней открывающейся части включают дверь багажника и дверь хэтчбека. Зазоры CL сформированы таким образом, что объект остается на заданном или большем расстоянии от задней открывающейся части транспортного средства V1, и поэтому оператор может вынуть багаж или тому подобное из задней открывающейся части.
[0061] В примере, показанном на фиг. 7A и 7B, зазор CLL между левой дверью, ближайшей к оператору M, и конструкцией ST устанавливается в качестве цели управления (которой управляют так, чтобы иметь заданное или большее расстояние). В этом случае ширина зазора CLL может быть установлена большей, чем ширина зазора CLR. Благодаря образованию прохода (зазора) в месте, через которое оператор М может легко получить доступ к открывающейся части (такой как дверь или багажник), удобство пользователя может быть улучшено. В этом случае значение координат Y1, проходящее через контрольное положение PV транспортного средства V1, смещается в направлении +Y/-Y от центра въезда.
[0062] (3) Управляющее устройство 10 может вычислять второй маршрут для направления транспортного средства V1 к месту покидания, в котором другое транспортное средство (объект) остается на заданном или большем расстоянии от открывающейся части транспортного средства V1. Со ссылкой на Фиг. 8A-8C будет приведено описание первого управления и второго управления, когда другое транспортное средство V2 присутствует рядом с транспортным средством V1, припарковываемым на парковке прямоугольной формы. Фиг. 8A представляет собой рисунок прогнозирования состояния, в котором транспортное средство V1 паркуется на целевом парковочном месте PL по первому маршруту RT1. Другое транспортное средство V2 присутствует рядом с целевым парковочным местом PL. Когда области существования целевого парковочного места PL и другого транспортного средства V2 перекрываются или когда расстояние между целевым парковочным местом PL и другим транспортным средством V2 меньше, чем заданное расстояние, выполнение первого управления затруднено, и поэтому управляющее устройство 10 определяет приостановить/отменить выполнение первой инструкции управления. Управляющее устройство 10 может определить приостановить/отменить выполнение первой инструкции управления, когда расстояние между целевым парковочным местом PL и другим транспортным средством V2 мало и трудно открыть боковую дверь транспортного средства V1 после выполнения первого управления. В это время контрольное положение PV транспортного средства V1 находится в координатах X0 и Y0. Как показано на фигуре, расстояние CLR между другим транспортным средством V2 (объектом) и транспортным средством V1 меньше, чем заданное расстояние, и, следовательно, открывающаяся часть не может быть открыта.
[0063] ФИГ. 8B – рисунок при рассмотрении сверху состояния, в котором транспортное средство V1 перемещается вперед по второму маршруту RT2F для оставления транспортным средством V1 целевого парковочного места PL. Второй маршрут рассчитан на направление транспортного средства V1 к месту покидания, в котором другое транспортное средство V2 (объект) остается на заданном или большем расстоянии от открывающейся части транспортного средства V1. Контрольное положение PV транспортного средства V1, находящегося в месте покидания после выполнения второго управления, находится в координатах X1 и Y1. Образуется зазор CL между находящимся в месте покидания транспортным средством V1 и другим транспортным средством V2. Зазор CLR, образовавшийся между дверью DR транспортного средства V1 и другим транспортным средством V2, не меньше, чем заданное расстояние. Транспортное средство V1 перемещается к месту покидания, чтобы позволить перемещать правую дверь DR в диапазоне RR. Контрольное положение PV транспортного средства V1 находится в координатах X1 и Y1, когда выполнено второе управление для перемещения транспортного средства V1 в место покидания. По сравнению с положением транспортного средства V1, представленным координатами X0 и Y0, показанными на ФИГ. 8A, положение транспортного средства V1 смещается в направлении движения транспортного средства по оси X.
[0064] ФИГ. 8C – рисунок при рассмотрении сверху состояния, в котором транспортное средство V1 перемещается назад по второму маршруту RT2B для оставления транспортным средством V1 целевого парковочного места PL. Второй маршрут рассчитан на направление транспортного средства V1 к месту покидания, в котором другое транспортное средство V2 (объект) остается на заданном или большем расстоянии от открывающейся части транспортного средства V1. Контрольное положение PV транспортного средства V1, находящегося в месте покидания после выполнения второго управления, находится в координатах X2 и Y2. Образуется зазор CLR между дверью DR находящегося в месте покидания транспортного средства V1 и другим транспортным средством V2 (объектом). Зазор CLR с правой стороны, образовавшийся между дверью DR транспортного средства V1 и другим транспортным средством V2, не меньше, чем заданное расстояние. Транспортное средство V1 перемещается к месту покидания, чтобы позволить переместить правую дверь DR в диапазоне RR. Контрольное положение PV транспортного средства V1 находится в координатах X2 и Y2, когда выполнено второе управление для перемещения транспортного средства V1 в место покидания. По сравнению с положением транспортного средства V1, представленным координатами X0 и Y0, показанными на фиг. 8A, положение транспортного средства V1 смещено в обратную сторону, противоположную направлению движения транспортного средства по оси X.
[0065] В состоянии, в котором первое управление отменено, как показано на фиг. 8A, расстояние между транспортным средством V1 и другим транспортным средством V2 короткое, и оператор M не может открыть дверь транспортного средства V1, не может сесть в транспортное средство V1, чтобы вести транспортное средство V1, и не может извлечь багаж из транспортного средства. Напротив, в состоянии, в котором второе управление выполнено так, как показано на фиг. 8A и 8B, расстояние между транспортным средством V1 и другим транспортным средством V2 не меньше, чем заданное расстояние, и оператор M может сесть в транспортное средство V1, чтобы вести транспортное средство V1, может вынуть багаж из транспортного средства и может переместить транспортное средство V1. Зазор CLR сформирован таким, что другое транспортное средство V2 остается на заданном или большем расстоянии от боковой открывающейся части транспортного средства V1, и поэтому оператор может попасть в транспортное средство V1 от правой двери DR, чтобы вести транспортное средство V1.
[0066] (4) Управляющее устройство 10 может вычислять второй маршрут для направления транспортного средства V1 в место покидания, в котором стена WT (объект) в качестве конструкции парковки остается на заданном или большем расстоянии от открывающейся части транспортного средства V1. Со ссылкой на фиг. 9 будет приведено описание первого управления и второго управления, когда рядом с паркующимся транспортным средством V1 существует стена WL (объект). ФИГ. 9 – рисунок прогнозирования состояния, в котором транспортное средство V1 паркуется в целевом парковочном месте PL по первому маршруту RT1. Стена WL существует рядом с целевым парковочным местом PL. Когда области существования целевого парковочного места PL и стены WL перекрываются или когда расстояние между целевым парковочным местом PL и стеной WL меньше заданного расстояния, выполнение первого управления затруднено, и поэтому управляющее устройство 10 определяет приостановить/отменить выполнение первой инструкции управления. Управляющее устройство 10 может определять приостановить/отменить выполнение первой инструкции управления, когда расстояние между целевым парковочным местом PL и стеной WL мало и трудно открыть боковую дверь транспортного средства V1 после выполнения первого управления. В это время контрольное положение PV транспортного средства V1 находится в координатах X0 и Y0. Как показано на фигуре, расстояние CLR между стенкой WL и транспортным средством V1 меньше заданного расстояния, и поэтому открывающаяся часть не может быть открыта. Как показано на фиг. 9, второй маршрут рассчитан на направление транспортного средства V1 в место покидания, в котором стенка WL (объект) остается на заданном или большем расстоянии от открывающейся части транспортного средства V1. Контрольное положение PV транспортного средства V1′, находящегося в месте покидания после выполнения второго управления, расположено в координатах X1 и Y1. Образуется зазор CLR между открывающейся частью находящегося в месте покидания транспортного средства V1 и стенкой WL. Зазор CLR, образовавшийся между дверью DR транспортного средства V1 и стенкой WL, составляет не менее заданного расстояния. Транспортное средство V1 перемещается в место покидания, тем самым позволяя правой двери DR перемещаться в диапазоне RR. Контрольное положение PV транспортного средства V1 расположено в координатах X1 и Y1, когда выполнено второе управление для перемещения транспортного средства V1 в место покидания.
[0067] В состоянии, в котором отменено первое управление, расстояние между транспортным средством V1 и стенкой WL короткое, и оператор М не может открыть дверь транспортного средства V1, не может сесть в транспортное средство V1, чтобы вести транспортное средство V1, и не может вынуть багаж из транспортного средства. Напротив, в состоянии, в котором выполнено второе управление, расстояние между транспортным средством V1′ и стенкой WL не меньше, чем заданное расстояние, и оператор M может сесть в транспортное средство V1, чтобы вести транспортное средство V1, может вынуть багаж из транспортного средства и может переместить транспортное средство V1. Зазор CLR сформирован таким, что стенка WL остается на заданном или большем расстоянии от боковой открывающейся части транспортного средства V1, и поэтому оператор может попасть в транспортное средство V1 от правой двери DR, чтобы вести транспортное средство V1.
[0068] (5) Управляющее устройство 10 может вычислять второй маршрут для направления транспортного средства V1 в место покидания, в котором стена WT (объект) в качестве конструкции парковки остается на заданном или большем расстоянии от открывающейся части транспортного средства V1. Со ссылкой на фиг. 10 будет дано описание первого управления и второго управления, когда стена WL (объект) существует позади паркующегося транспортного средства V1. ФИГ. 10 – рисунок прогнозирования состояния, в котором транспортное средство V1 паркуется в целевом парковочном месте PL по первому маршруту RT1. Стена WL находится за целевым парковочным местом PL. Когда области существования целевого парковочного места PL и стены WL перекрываются или когда расстояние между целевым парковочным местом PL и стеной WL меньше заданного расстояния, выполнение первого управления затруднено, и поэтому управляющее устройство 10 определяет приостановить/отменить выполнение первой инструкции управления. Управляющее устройство 10 может определить приостановить/отменить выполнение первой инструкции управления, когда расстояние между целевым парковочным местом PL и стенкой WL мало и трудно открыть заднюю открывающуюся часть транспортного средства V1 после выполнения первого управления. В это время контрольное положение PV транспортного средства V1 находится в координатах X0 и Y0. Как показано на фигуре, расстояние CLR между стенкой WL и транспортным средством V1 меньше заданного расстояния, и поэтому задняя открывающаяся часть (дверь багажника/хэтчбека) не может быть открыта.
[0069] Как показано на фиг. 10, второй маршрут рассчитан на направление транспортного средства V1 в место покидания, в котором стенка WL (объект) остается на заданном или большем расстоянии от открывающейся части транспортного средства V1. Контрольное положение PV транспортного средства V1′, находящегося в месте покидания после выполнения второго управления, расположено в координатах X1 и Y1. Образуется зазор CLB′ между задней открывающейся частью транспортного средства V1, находящегося в месте покидания, и стенкой WL. Зазор CLB, образовавшийся между задней открывающейся частью транспортного средства V1 и стенкой WL, составляет не менее заданного расстояния. Заданное расстояние между задней открывающейся частью транспортного средства V1 и стеной WL установлено на такое расстояние, которое позволяет находящемуся в транспортном средстве лицу стоять между стенкой WL и транспортным средством V1 и открывать заднюю дверь задней открывающейся части для манипулирования багажом в багажнике. Расстояние, необходимое для открытия и закрытия задней двери задней открывающейся части, может быть установлено на основе механизма открывания/закрывания двери, размера двери и расстояния от двери при открытии. Транспортное средство V1 перемещается в место покидания, что позволяет перемещать заднюю дверь DR. Контрольное положение PV транспортного средства V1 расположено в координатах X1 и Y1, когда выполнено второе управление для перемещения транспортного средства V1 в место покидания.
[0070] В состоянии, в котором отменено первое управление, расстояние между транспортным средством V1 и стенкой WL короткое, и оператор М не может открыть дверь транспортного средства V1, не может сесть в транспортное средство V1, чтобы вести транспортное средство V1, и не может вынуть багаж из транспортного средства. Напротив, в состоянии, в котором выполнено второе управление, расстояние между транспортным средством V1′ и стенкой WL не меньше, чем заданное расстояние, и оператор M может вынуть багаж из багажника.
[0071] Обращаясь снова к фиг. 4, на этапе 113, когда оператор М дает команду выполнить вторую инструкцию управления, начинается второе управление. ФИГ. 11 - пример отображения на дисплее 53 операционного терминала 5, который принимает команду на выполнение второй инструкции управления. Как показано на фиг. 11, пример отображения включает в себя транспортное средство V1 перед парковкой, другие транспортные средства V2, припаркованные вокруг транспортного средства V1, целевое парковочное место PL для транспортного средства V1 и объект OB, присутствующий на маршруте к целевому парковочному месту PL (объект OB, на который следует обратить внимание), которые представлены после преобразования координат, как если бы они рассматривались сверху. Объект OB находится вблизи точки поворота для парковки, поэтому первое управление при его выполнении для транспортного средства V1 приостанавливается. В этом случае управляющее устройство 10 отображает кнопку «Спасение», которая делает запрос оператору М о том, выполнять ли второе управление. Когда с помощью кнопки «Спасение» осуществлен ввод «принятие», выполняется вторая инструкция управления. В этом примере название второго управления для оставления транспортным средством V1 целевого парковочного места PL приведено как режим «спасения», но его название конкретно не ограничено. Кнопка «ПУСК» - это кнопка ввода ранее описанного переключателя автоблокировки, и выполнение первого управления продолжается, пока эта кнопка нажата и/или ее касаются.
[0072] После того как второе управление завершено, транспортным средством V1 управляют для перемещения в место покидания. Место покидания не является парковочным местом, и поэтому необходимо переместить транспортное средство V1 на парковочное место. На этапе 114, когда снова вводится команда/инструкция на выполнение первого управления для перемещения транспортного средства в целевое парковочное место PL, выполняются процессы этапа 115 и последующих этапов, чтобы снова переместить транспортное средство в целевое парковочное место PL.
[0073] На этапе 115 управляющее устройство 10 обнаруживает объекты вокруг транспортного средства V1. На этапе 116 управляющее устройство 10 снова устанавливает целевое парковочное место PL. На этапе 117 управляющее устройство 10 вычисляет маршрут парковки (первый маршрут) к целевому парковочному месту PL. Маршрут парковки включает в себя положение поворота для парковки, необходимое для перемещения на парковочное место. Для этой операции маршрут парковки определяется как линия, а также определяется как полосообразная зона, соответствующая занятой транспортным средством V зоне, на основе ширины транспортного средства. Занимаемая транспортным средством V зона определяется с учетом ширины транспортного средства и запаса по ширине, обеспечиваемого для движения. Управляющее устройство 10 подтверждает, что никакие объекты не обнаружены в пределах занятой области.
[0074] На этапе 117 управляющее устройство 10 генерирует инструкцию управления для перемещения транспортного средства V по вычисленному маршруту парковки. Управляющее устройство 10 предварительно хранит информацию о технических характеристиках транспортного средства V, необходимую для инструкции управления. Примеры инструкции управления включают в себя инструкции по эксплуатации в отношении величины поворота руля, скорости поворота руля, ускорения поворота руля, положения переключения передач, скорости (включая нулевую), ускорения и замедления транспортного средства V, которые связаны с моментом времени или положением при движении транспортного средства V по маршруту парковки, и другие инструкции по эксплуатации. Инструкция управления включает в себя время выполнения или положение выполнения вышеупомянутой инструкции по эксплуатации транспортного средства V. Инструкция, касающаяся маршрута парковки, и инструкция по эксплуатации, связанная с маршрутом парковки, выполняются транспортным средством V, и поэтому транспортное средство может перемещаться в (парковаться на) целевое положение парковки. Инструкция управления согласно одному или более вариантам осуществления настоящего изобретения включает в себя инструкцию на остановку транспортного средства V во втором положении. Дополнительно или альтернативно, инструкция управления может включать в себя операцию открытия двери транспортного средства V во втором положении.
[0075] На этапе 118 управляющее устройство 10 отслеживает изменение окружающей среды вокруг транспортного средства V до тех пор, пока транспортное средство V не достигнет положения поворота для парковки. Когда транспортное средство V достигает положения поворота для парковки, на этапе 119 выполняется переключение передач, включенное в состав инструкции управления. За этапом 119 следует этап 120, на котором управление парковкой завершается путем последовательного выполнения инструкций управления.
[0076] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения управляет работой системы 40 привода через контроллер 70 транспортного средства в соответствии с инструкцией управления так, что транспортное средство V движется по маршруту парковки. Устройство 100 управления парковкой вычисляет командные сигналы системе 40 привода транспортного средства V, такой как электродвигатель EPS, выдавая в качестве обратной связи выходное значение датчика 50 угла поворота руля, так что траектория движения транспортного средства V совпадает с вычисленным маршрутом парковки, и передает командные сигналы в систему 40 привода или в контроллер 70 транспортного средства, который управляет системой 40 привода.
[0077] Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя блок управления для управления парковкой. Блок управления для управления парковкой получает информацию о диапазоне переключения передач от блока управления AT/CVT, информацию о скорости вращения колес от блока управления ABS, информацию об угле поворота руля от блока управления углом поворота руля, информацию о скорости вращения двигателя от ECM и другую необходимую информацию. На основе этих элементов информации блок управления для управления парковкой вычисляет и выводит информацию с инструкциями по автономному рулению в блок управления EPS, информацию с инструкциями, такую как предупреждение, в блок управления счетчиком, и т.п. Управляющее устройство 10 получает элементы информации, которые получены датчиком 50 угла поворота руля устройства рулевого управления транспортного средства V, датчиком 60 скорости транспортного средства и другими датчиками транспортного средства V, через контроллер 70 транспортного средства.
[0078] Система 40 привода в соответствии с одним или более вариантами осуществления настоящего изобретения приводит в движение транспортное средство V1 для перемещения (движения) из текущего положения в целевое положение парковки путем вождения на основе командных сигналов управления, полученных от устройства 100 управления парковкой. Устройство рулевого управления в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V в направлениях вправо и влево. Электродвигатель EPS, включенный в состав системы 40 привода, приводит в действие силовой механизм усилителя рулевого управления устройства рулевого управления на основе командных сигналов управления, полученных от устройства 100 управления парковкой, для управления величиной поворота руля и управляет работой при движении транспортного средства V в целевое положение парковки. Содержание управления и схема работы для парковки транспортного средства V конкретно не ограничены, и может быть соответствующим образом применена любая схема, известная на момент подачи настоящей заявки.
[0079] Когда устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения управляет транспортным средством V для перемещения в целевое положение парковки по маршруту, рассчитанному на основе положения транспортного средства V и местоположения целевого положения парковки, акселератор и тормоз управляются автономно на основе назначенной управлением скорости транспортного средства (заданной скорости транспортного средства), а работа устройства рулевого управления управляет движением транспортного средства V автономным образом в соответствии со скоростью транспортного средства.
[0080] Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения используется в устройстве управления парковкой, как указано выше, и поэтому демонстрирует следующие эффекты. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения выполнено и работает так, как указано выше, и поэтому проявляет следующие эффекты.
[0081] (1) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, даже когда транспортное средство управляется, совершая остановку на парковочном месте, пользователь может войти в парковочное место. В способе управления в соответствии с одним или более вариантами осуществления настоящего изобретения, когда выполнение первой инструкции управления приостанавливается или отменяется, управляющее устройство 10 устанавливает в качестве второго маршрута маршрут для того, чтобы транспортное средство V1 оставалось с заданным или большим расстоянием от объекта, обнаруженного вокруг транспортного средства V1. Таким образом, вынуждая транспортное средство V1 оставаться с заданным или большим расстоянием от объекта, оператор может проходить по пространству между транспортным средством V1 и объектом. Когда приостановка первого управления происходит из-за присутствия подвижного объекта, оператор М может перемещать (уносить) объект, тем самым позволяя снова выполнять управление парковкой (первое управление), но если человек не может войти в парковочное место, он/она не может удалить объект. Кроме того, если транспортное средство остановлено без достаточного промежутка между транспортным средством и объектом, таким как стена или другое транспортное средство, оператор М не может попасть в транспортное средство V1, чтобы самому/самой вести его (выполнить операцию парковки), а также не может взять багаж из транспортного средства V1. Необходимо определить, следует ли продолжать выполнение первой инструкции управления, и выполнение первой инструкции управления, конечно, может быть приостановлено или отменено. Вышеуказанные ситуации, то есть ситуации, в которых невозможно войти в парковочное место для того, чтобы забрать объект, сесть в транспортное средство V1 и открыть открывающуюся часть, такую как дверь или багажник транспортного средства V1, когда транспортное средство V1 остановлено из-за приостановки/отмены первого управления, ухудшают удобство и надежность самого устройства управления парковкой. В одном или более вариантах осуществления настоящего изобретения, когда выполнение первой инструкции управления приостановлено или отменено, вычисляют второй маршрут для того, чтобы транспортное средство V1 оставалось с заданным или большим расстоянием от объекта, обнаруженного вокруг транспортного средства V1, и поэтому возможно предотвратить ситуации, в которых невозможно зайти на парковочное место, сесть в транспортное средство V1 и получить доступ к открывающейся части, такой как дверь или багажник транспортного средства V1, когда транспортное средство V1 остановлено.
[0082] (2) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, когда выполнение первой инструкции управления для транспортного средства V1 приостановлено или отменено в положении, в котором по меньшей мере часть транспортного средства V1 принадлежит целевому парковочному месту, управляющее устройство 10 вынуждают выполнять вторую инструкцию управления для перемещения транспортного средства по второму маршруту. Управляющее устройство 10 сравнивает область существования (координаты XY) транспортного средства V1 с областью (координатами XY) целевого парковочного места в тот момент, в который выполнение первой инструкции управления приостановлено или отменено, и когда эти области частично перекрываются друг с другом, управляющее устройство 10 вычисляет второй маршрут и выполняет второе управление (режим «спасения»). Когда транспортное средство V1 делает остановку в положении, в котором по меньшей мере часть транспортного средства V1 принадлежит целевому парковочному месту, очень вероятно попасть в состояние, с которым нельзя справиться, такое как состояние, при котором невозможно зайти на парковочное место, сесть в транспортное средство V1 или получить доступ к открывающейся части, такой как дверь или багажник транспортного средства V1, когда транспортное средство V1 остановлено. В одном или более вариантах осуществления настоящего изобретения второй маршрут вычисляют тогда, когда велика вероятность возникновения такого состояния, с которым нельзя справиться, и поэтому возможно предотвратить выполнение второго управления (режима «спасения»), которое не является необходимым в ситуации, с которой нельзя справиться.
[0083] (3) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения управляющее устройство 10 может устанавливать место покидания в положении с оставленным заданным или большим расстоянием от объекта и вычислять второй маршрут до установленного места покидания. Второй маршрут получается после того, как установлено место покидания, и поэтому транспортное средство V1 может быть направлено в положение с оставленным заданным или большим расстоянием от объекта.
[0084] (4) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения в состоянии, в котором выполнено второе управление, расстояния между транспортным средством V1 и конструкцией ST не меньше, чем заданное расстояние, и оператор М может вести транспортное средство V1, может взять багаж из транспортного средства и может перемещать транспортное средство V1.
[0085] (5) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, в примере, в котором управляющее устройство 10 обнаруживает положение оператора М и формирует зазор, имеющий заданное или большее расстояние между конструкцией ST и открывающейся частью, ближайшей к положению оператора М, среди множества открывающихся частей (таких как дверь и багажник) транспортного средства V1, управляющее устройство 10 устанавливает зазор CLL между ближайшей к оператору М левой дверью и конструкцией ST в качестве цели управления (которой управляют так, чтобы иметь заданное или большее расстояние). В этом случае ширина зазора CLL может быть установлена большей, чем ширина зазора CLR. Благодаря образованию прохода (промежутка) в месте, через которое оператор М может легко получить доступ к открывающейся части (такой как дверь или багажник), удобство пользователя может быть повышено.
[0086] (6) В способе управления парковкой согласно одному или более вариантам осуществления настоящего изобретения открывающиеся части транспортного средства V1 включают в себя боковые открывающиеся части. Боковые открывающиеся части – это боковые двери. Зазоры CL формируют такими, что объект остается на заданном или большем расстоянии от боковой открывающейся части транспортного средства V1, и поэтому оператор может попасть в транспортное средство V1 от боковой открывающейся части, чтобы вести транспортное средство V1.
[0087] (7) В способе управления парковкой согласно одному или более вариантам осуществления настоящего изобретения открывающиеся части транспортного средства V1 включают в себя заднюю открывающуюся часть. Примеры задней открывающейся части включают дверь багажника и дверь хэтчбека. Зазоры CL формируют такими, что объект остается на заданном или большем расстоянии от задней открывающейся части транспортного средства V1, и поэтому оператор может вынуть багаж или тому подобное из задней открывающейся части.
[0088] (8) В способе управления парковкой согласно одному или более вариантам осуществления настоящего изобретения образуется зазор между въездом ET парковочного места PL и открывающейся частью транспортного средства V1 и поэтому можно обеспечить путь входа на парковочное место PL.
[0089] (9) Также и в устройстве 100 управления парковкой, в котором исполняется способ согласно одному или более вариантам осуществления настоящего изобретения, проявляются действия и эффекты, описанные в вышеприведенных пунктах (1) - (8).
[0090] Изложенные выше варианты осуществления описаны для облегчения понимания настоящего изобретения, а не для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все конструктивные изменения и эквиваленты, подпадающие под технический объем настоящего изобретения.
Описание ссылочных обозначений
[0091] 1000 Система управления парковкой
100 Устройство управления парковкой
10 Управляющее устройство
11 ЦП
12 ПЗУ
13 ОЗУ
132 Запоминающее устройство
133 Картографическая информация
134 Информация о парковке (стоянке)
135 Информация об объектах
20 Устройство ввода
21 Устройство связи
211 Антенны
30 Устройство вывода
31 Дисплей
1a–1d Камеры
2 Дальномерные устройства
3 Информационный сервер
31 Устройство связи
32 Запоминающее устройство
33 Картографическая информация
34 Информация о парковке (стоянке)
35 Информация об объектах
5 Операционный терминал
51 Устройство связи
511 Антенна
52 Устройство ввода
53 Дисплей
200 Бортовое оборудование
40 Система привода
50 Датчик угла поворота руля
60 Датчик скорости транспортного средства
70 Контроллер транспортного средства
80 Датчик сидения
V, V1 Транспортное средство
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736518C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2733300C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2744447C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2746684C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736520C1 |
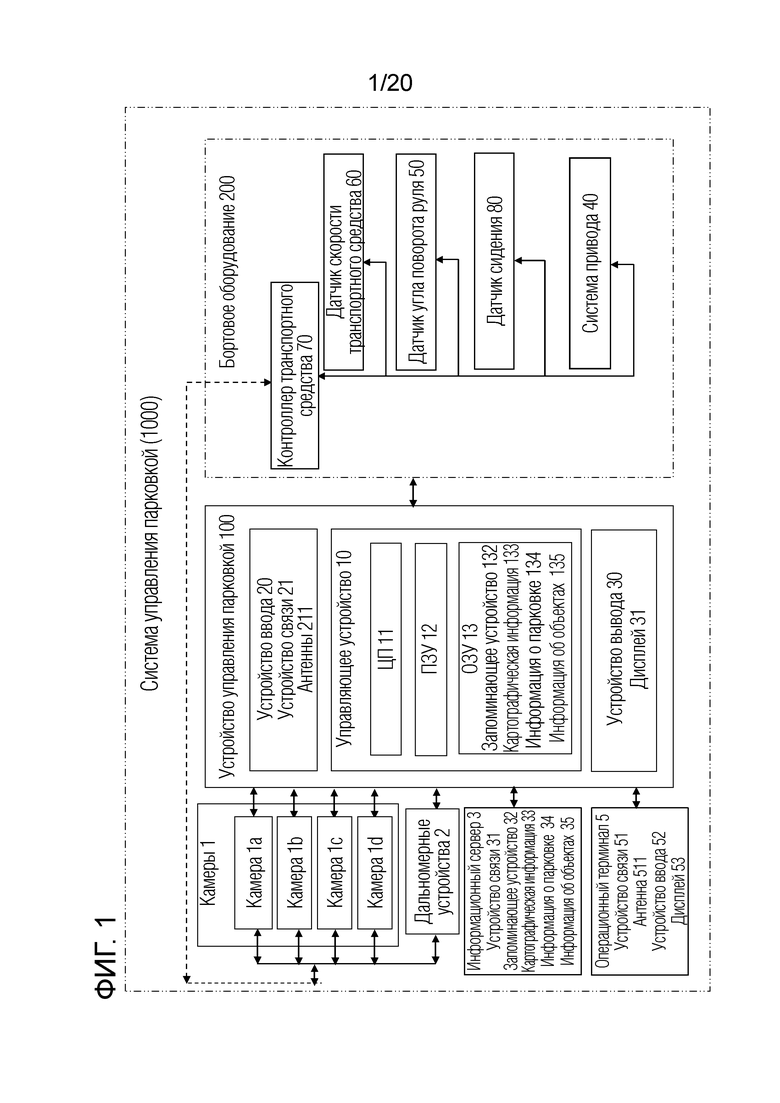
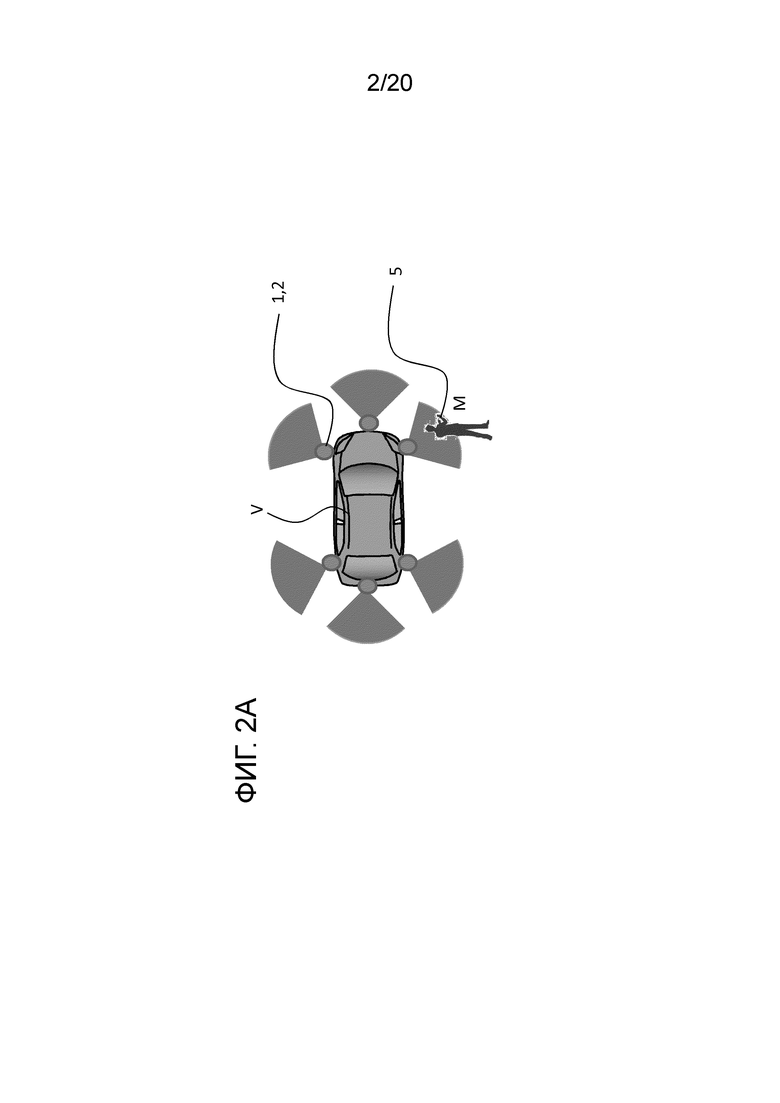
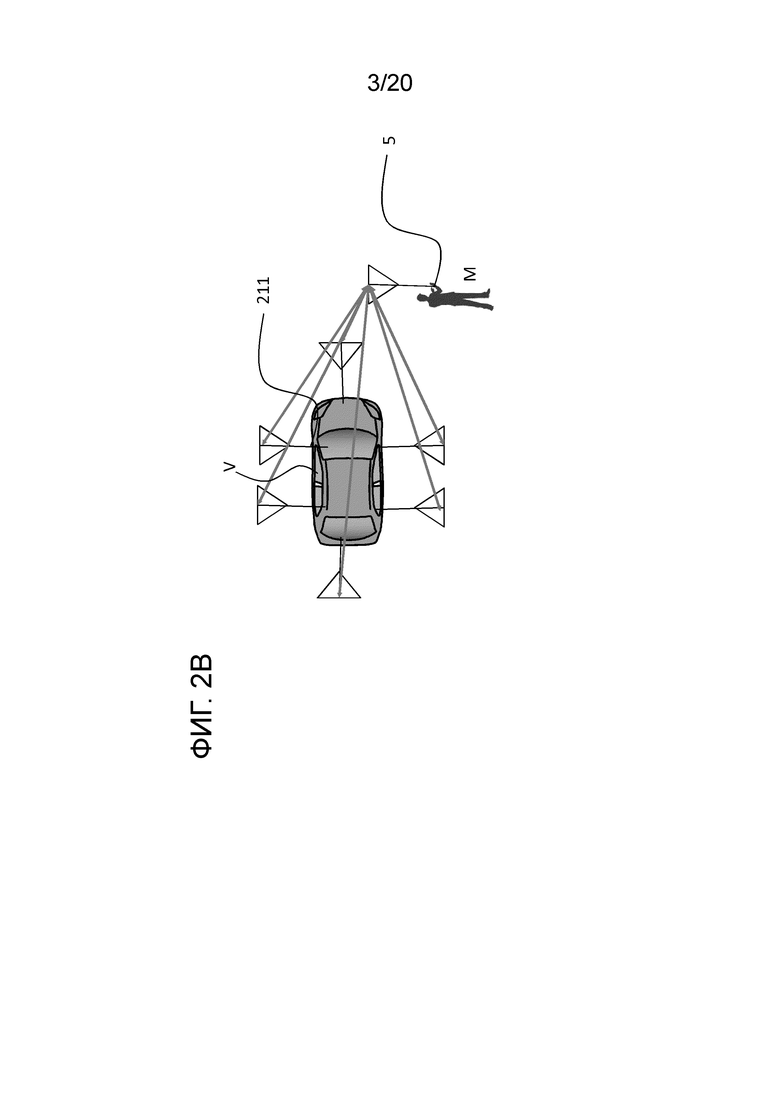
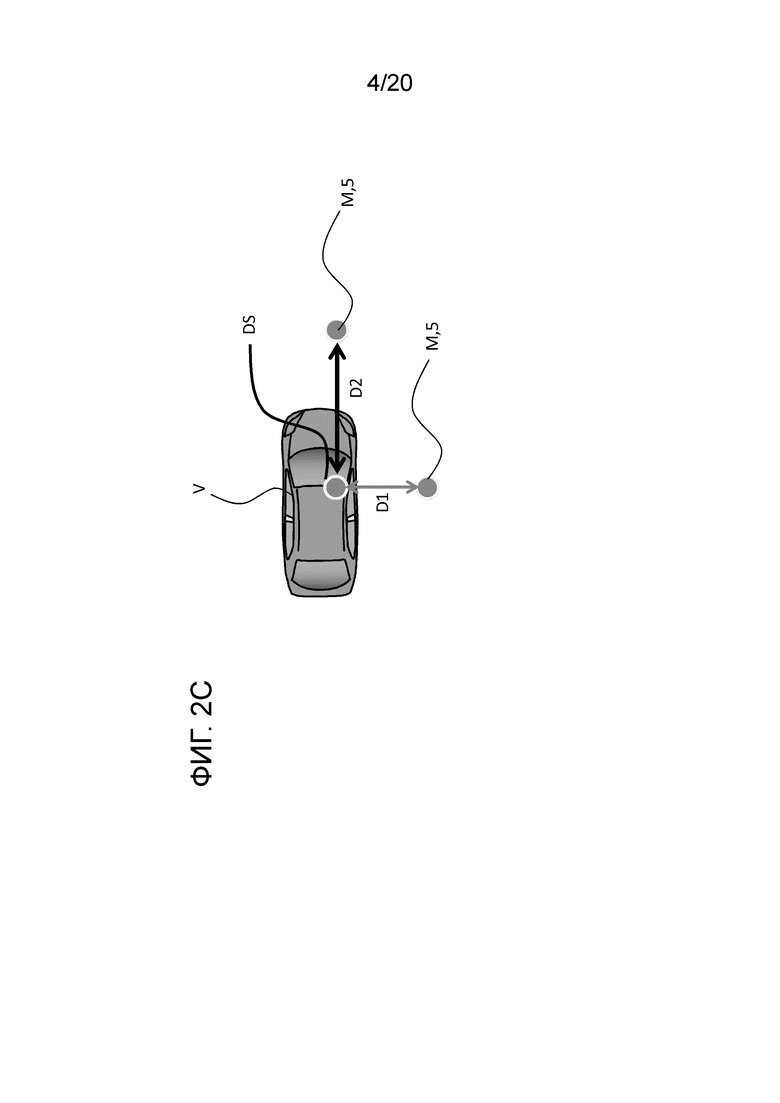
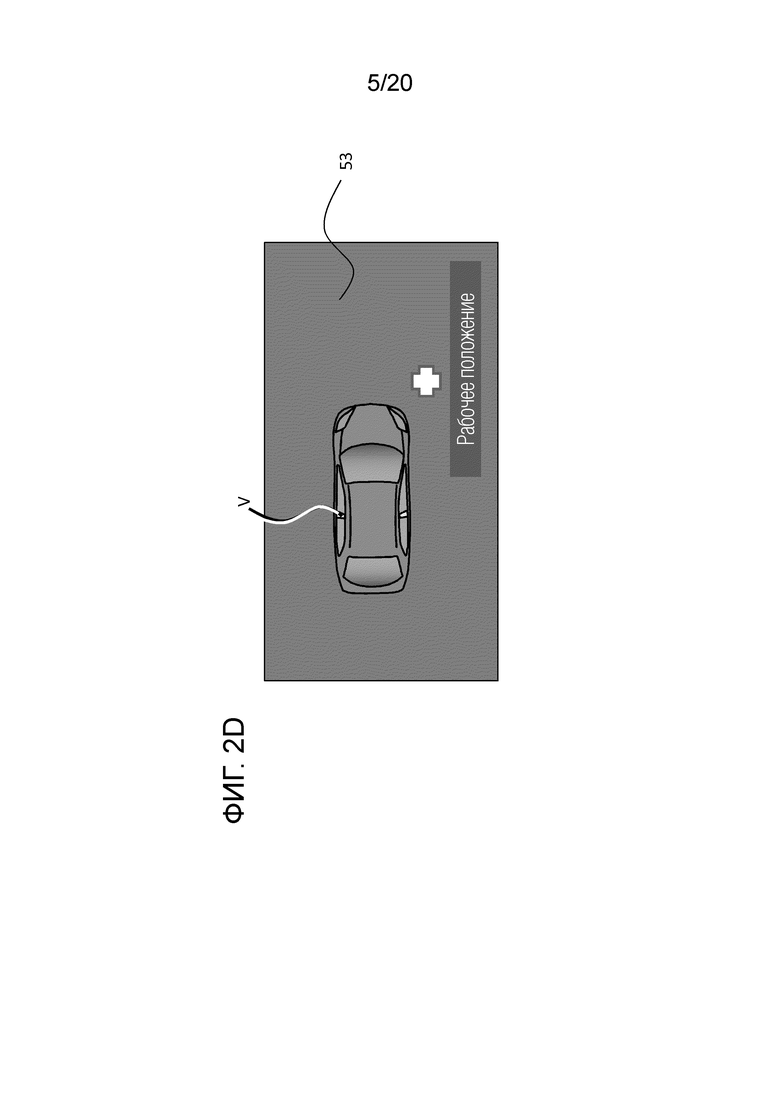
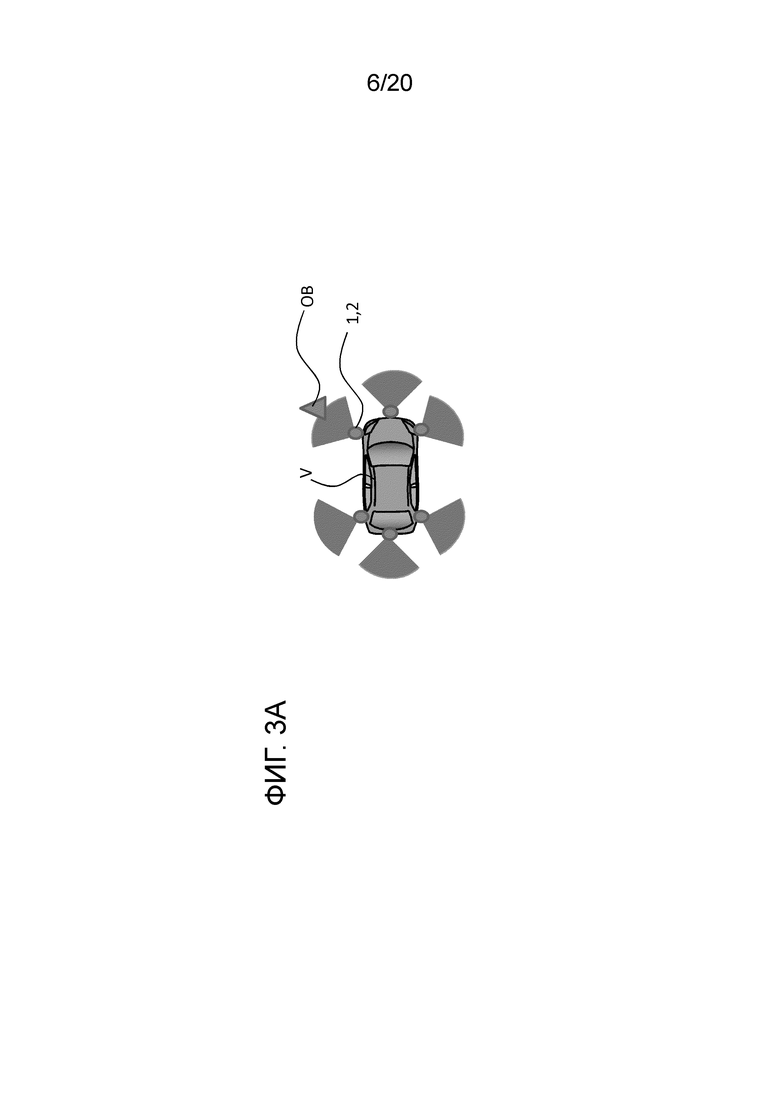
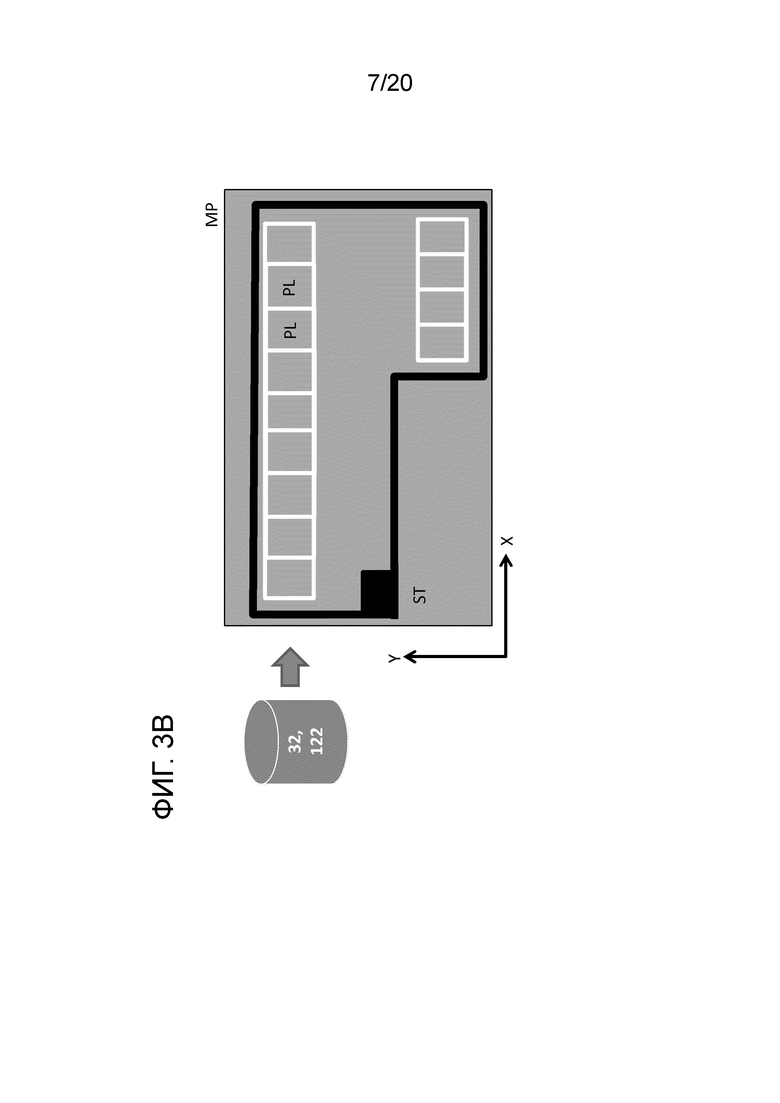
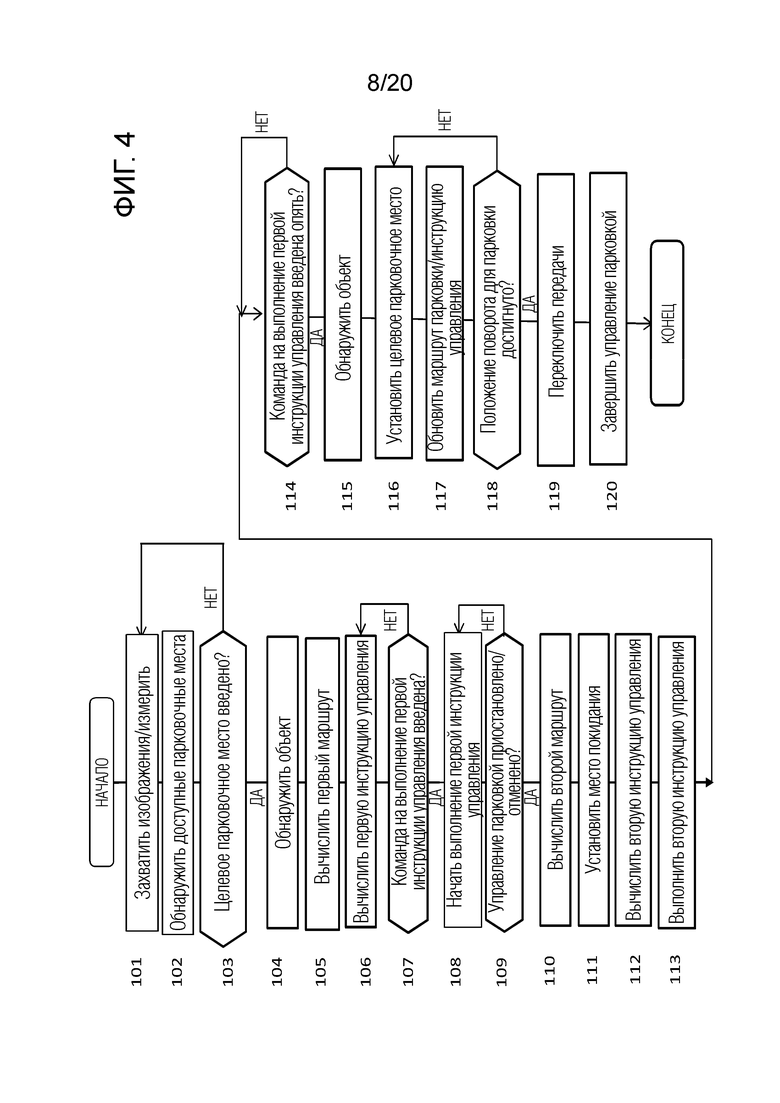
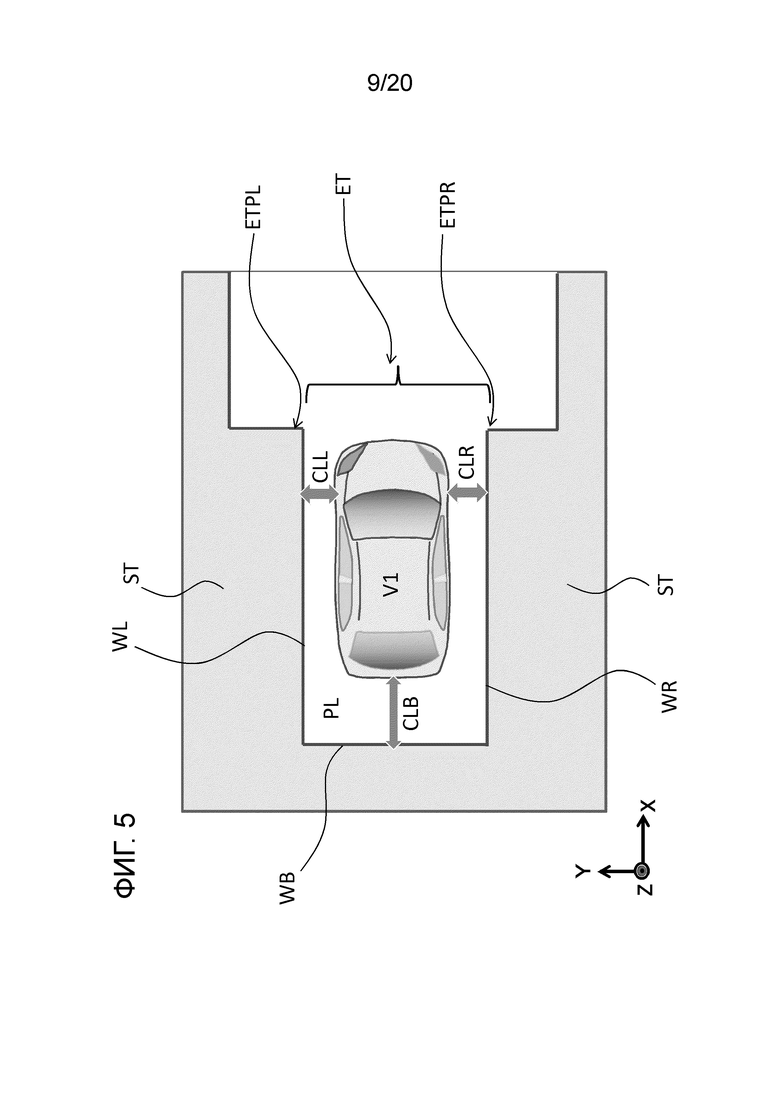
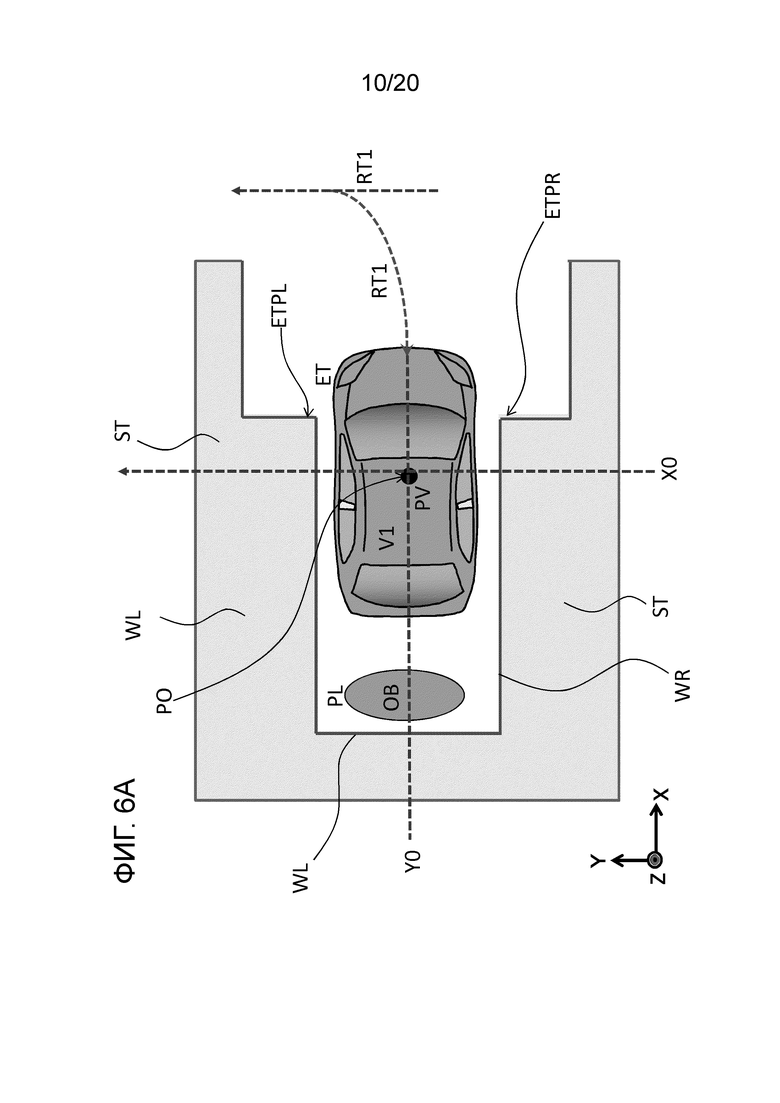
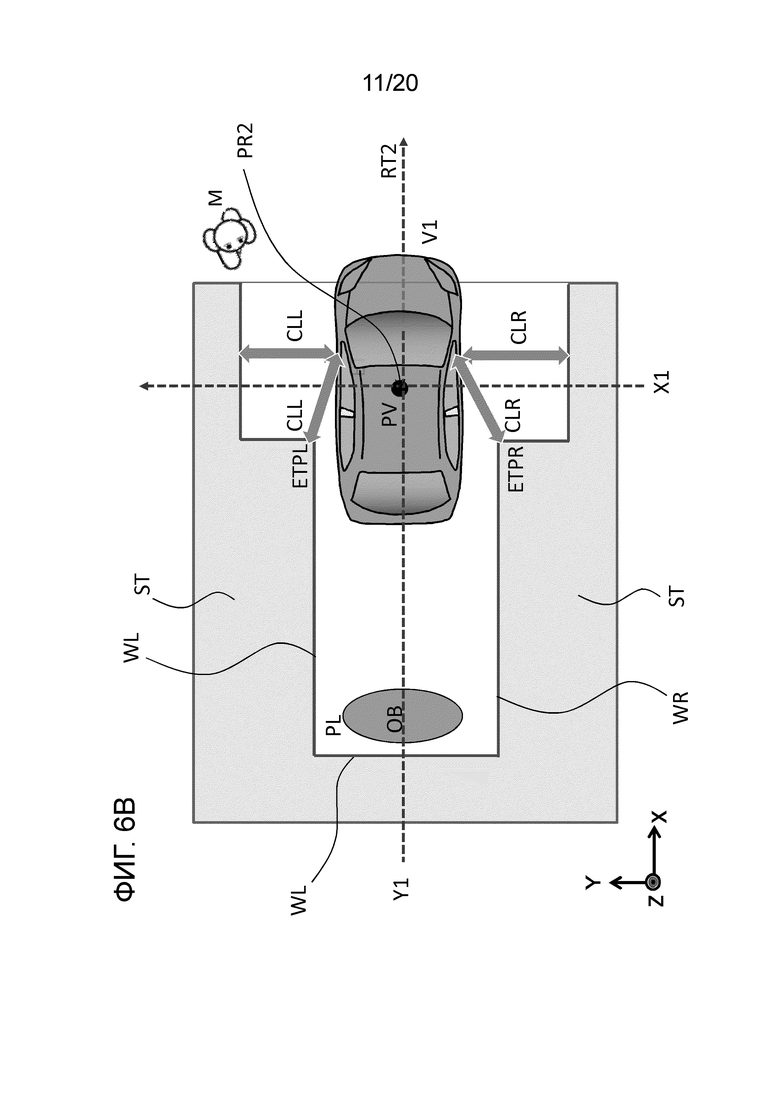
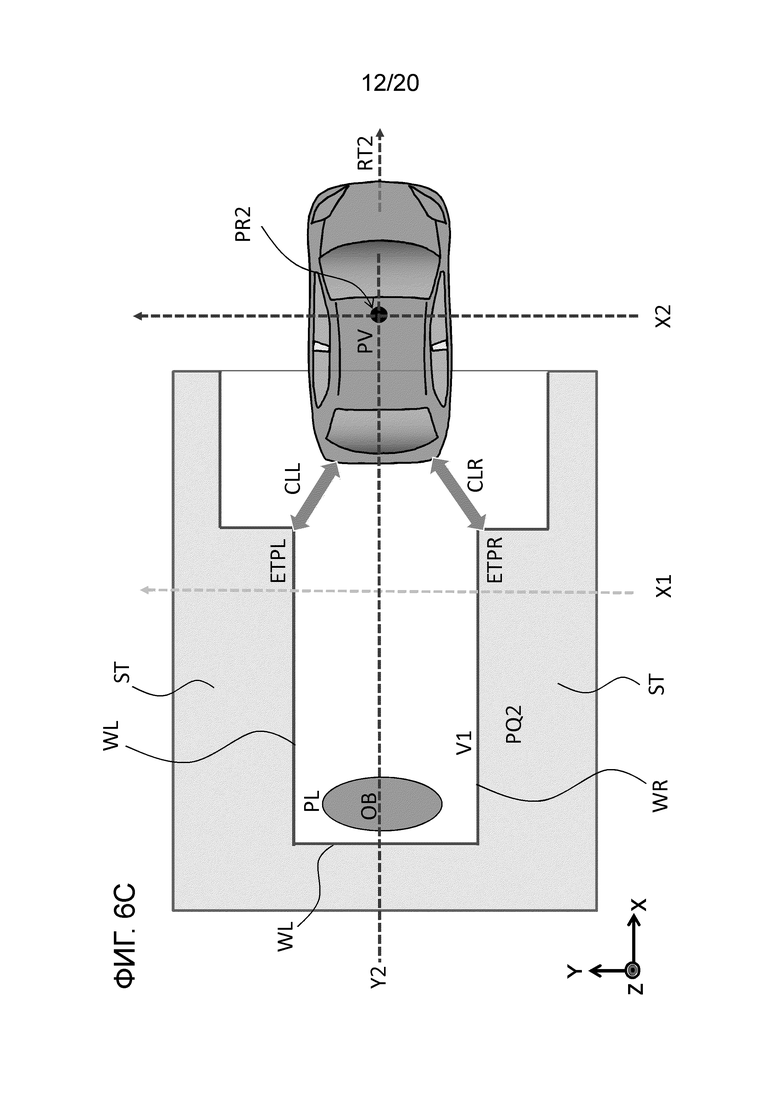
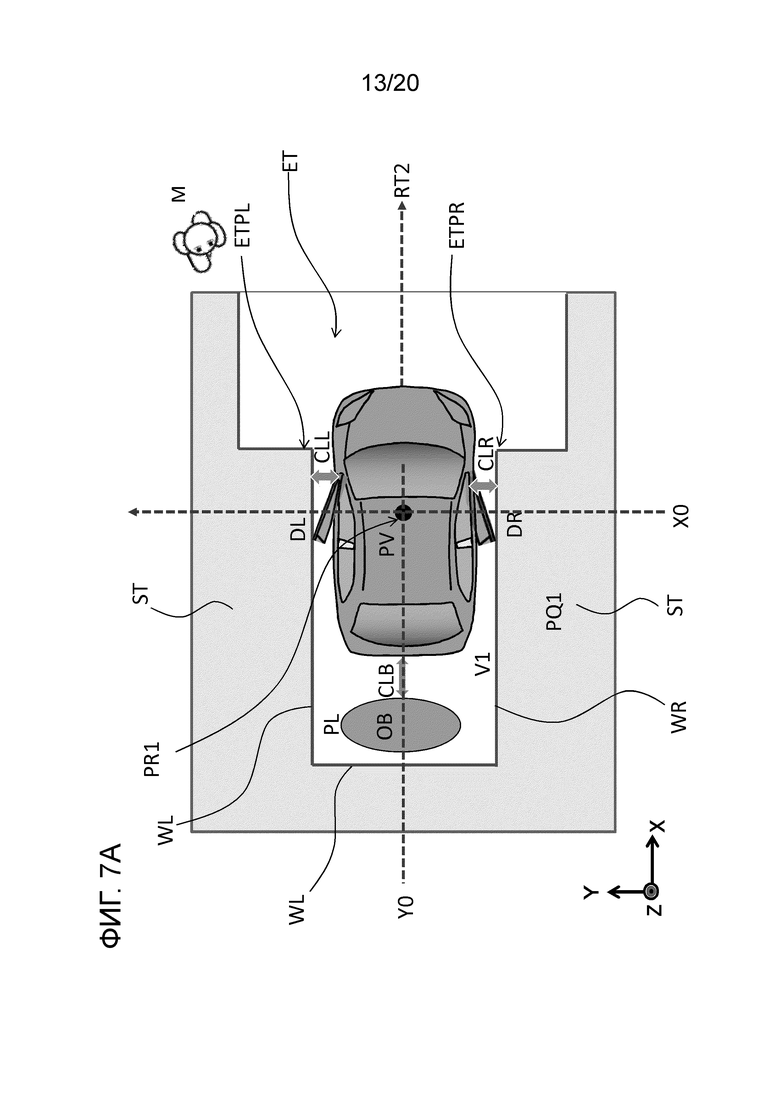
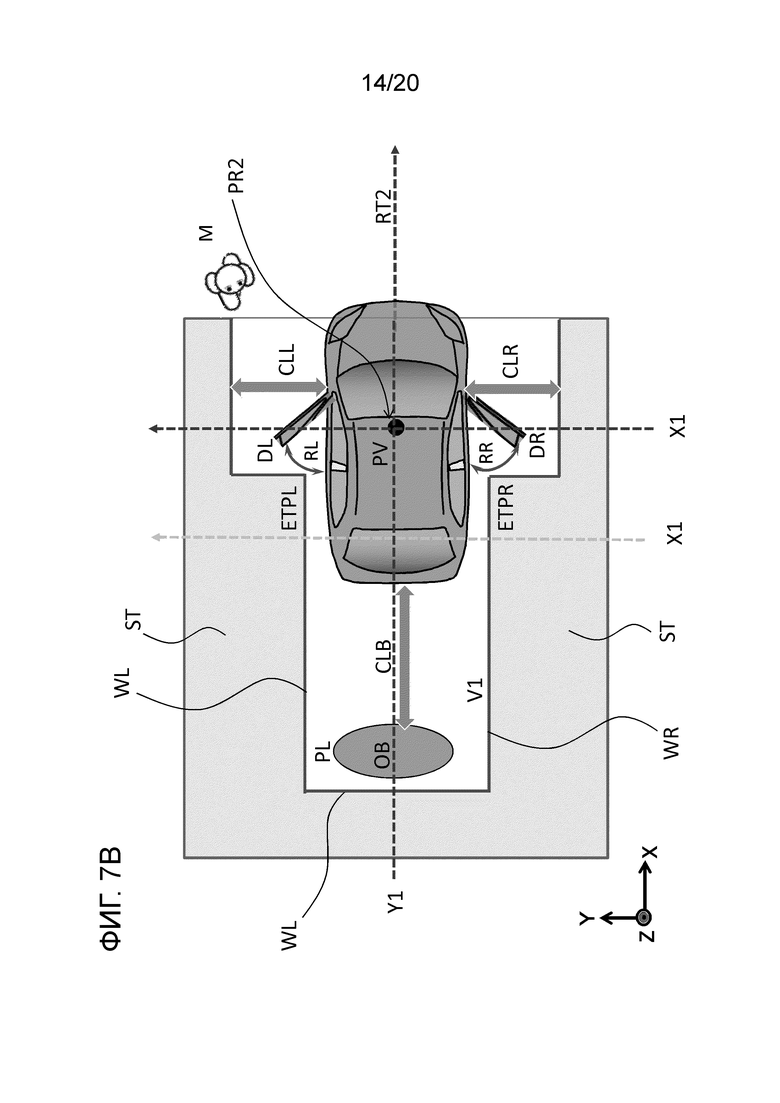
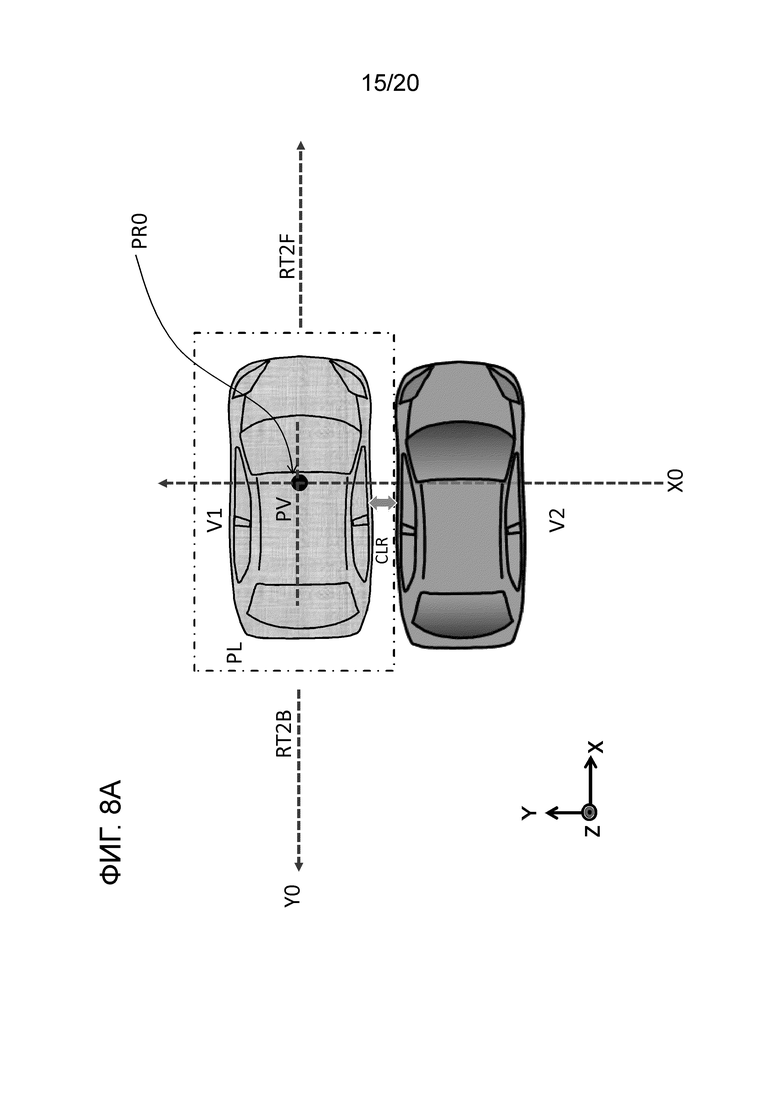
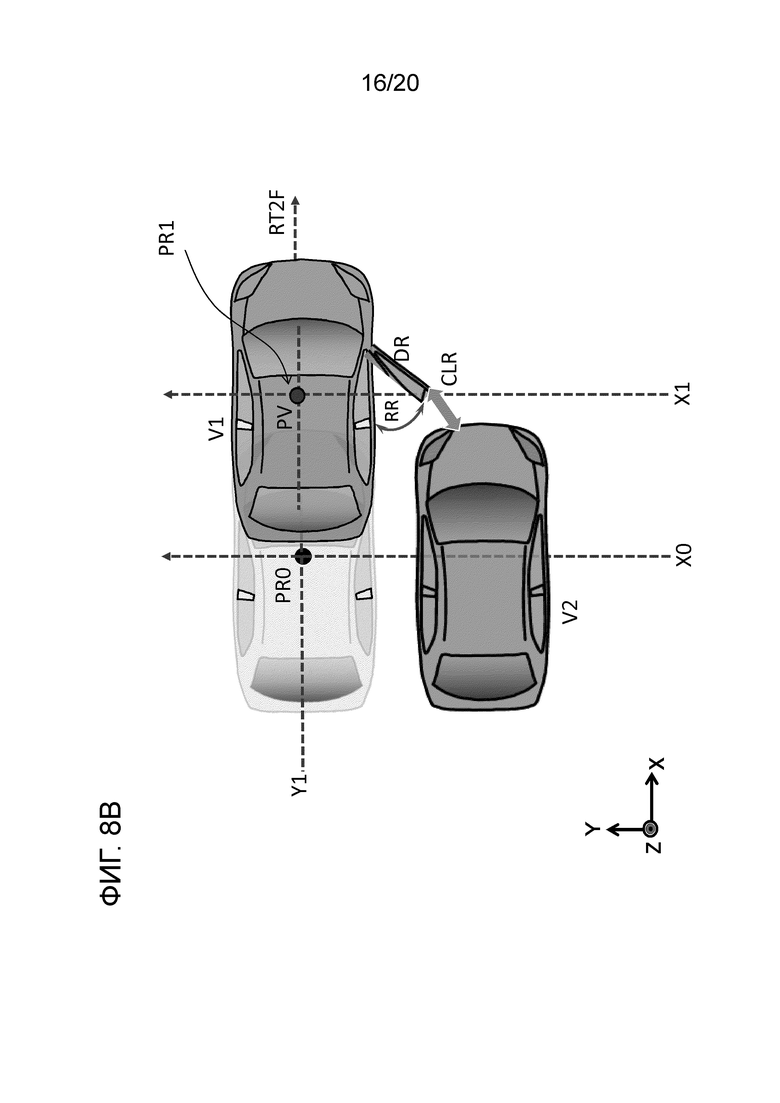
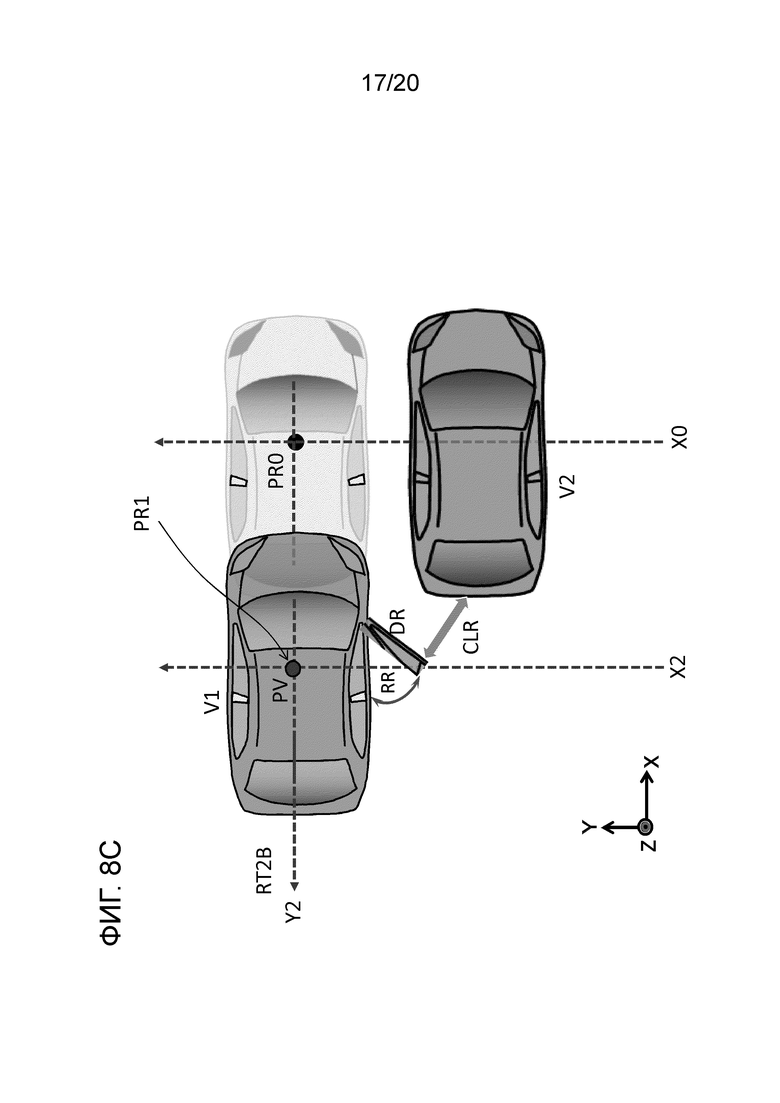
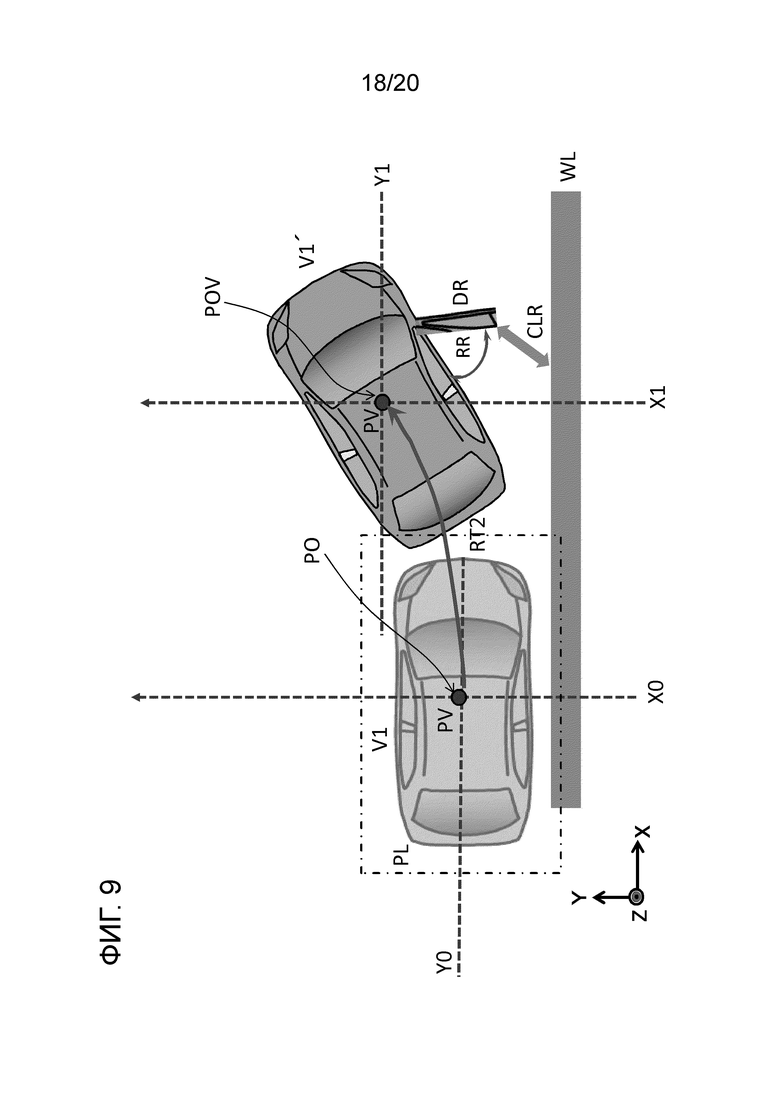
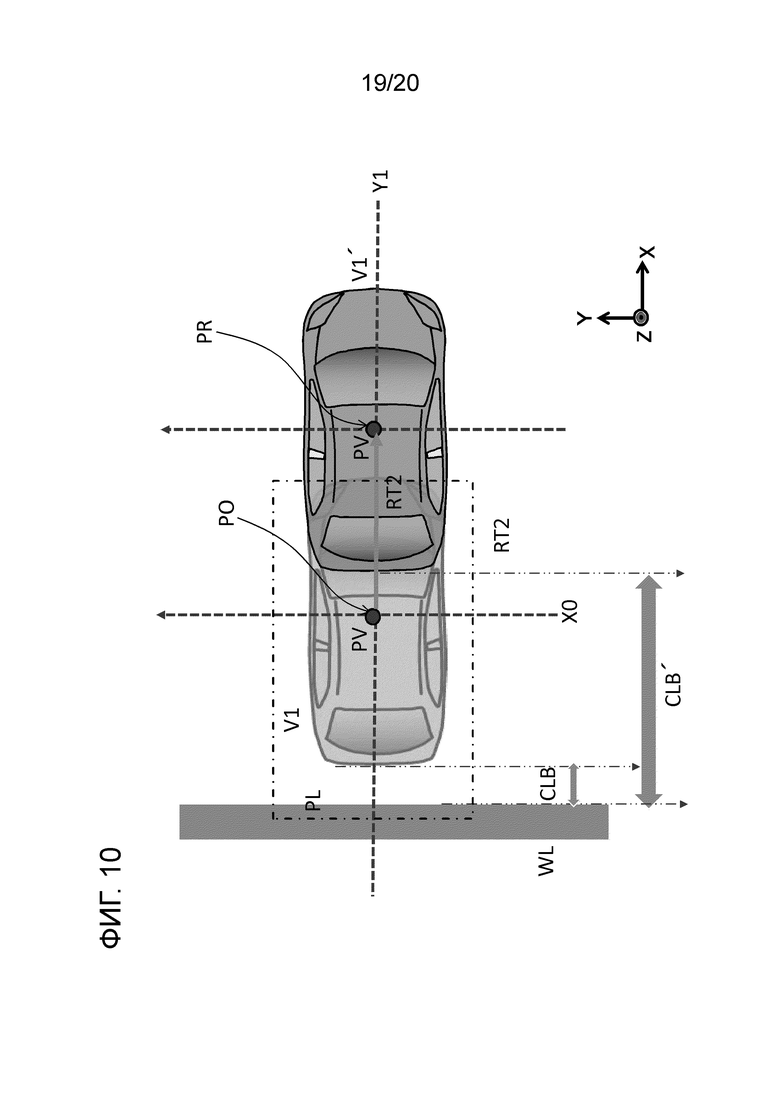
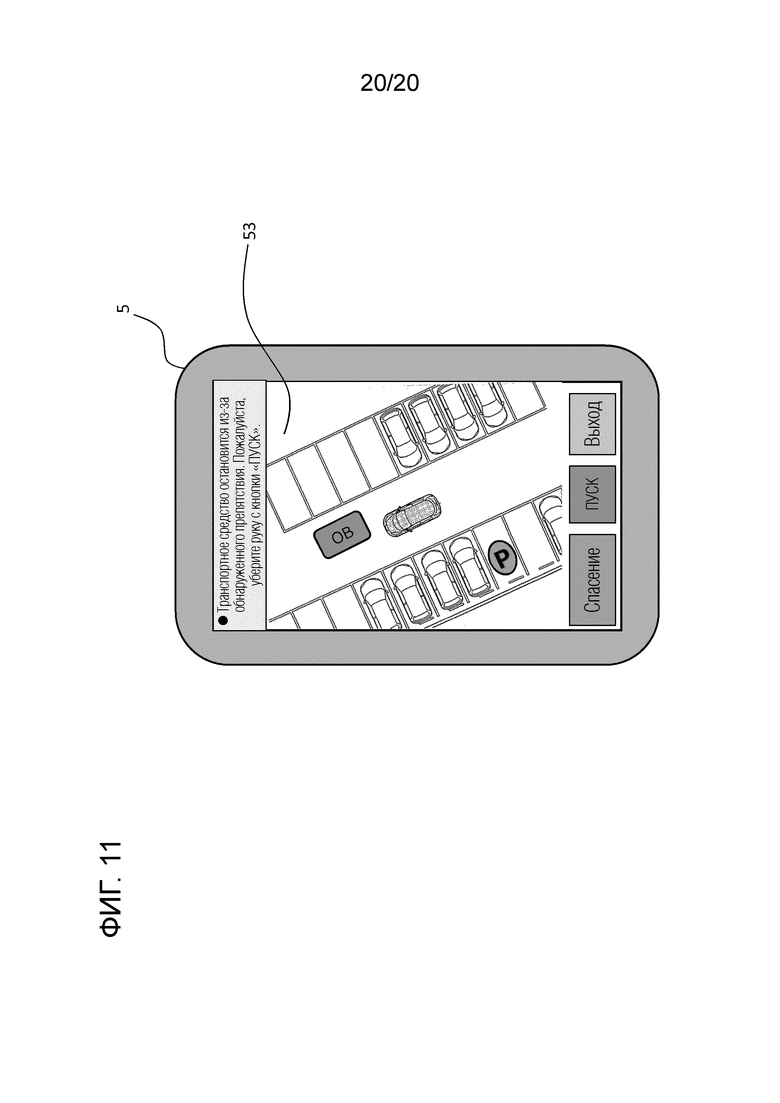
Изобретение относится к способу и устройству управления парковкой. Способ управления парковкой для вынуждения управляющего устройства транспортного средства выполнять первую инструкцию управления для перемещения транспортного средства по первому маршруту к целевому парковочному месту, на основе рабочей команды, полученной от оператора. Способ содержит вычисление второго маршрута для того, чтобы оставить транспортное средство с заданным или большим расстоянием от объекта, обнаруженного вокруг транспортного средства, и вынуждение управляющего устройства выполнять вторую инструкцию управления для перемещения транспортного средства по второму маршруту, когда расстояние между транспортным средством и обнаруженным вокруг транспортного средства объектом меньше заданного значения, когда выполнение первой инструкции управления приостанавливается или отменяется. Достигается повышение удобства доступа к припаркованному транспортному средству. 2 н. и 7 з.п. ф-лы, 20 ил.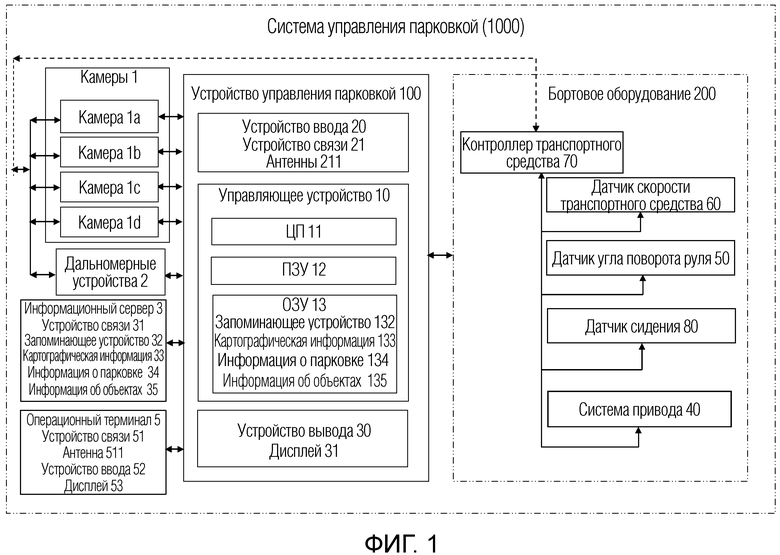
1. Способ управления парковкой для вынуждения управляющего устройства транспортного средства выполнять первую инструкцию управления для перемещения транспортного средства по первому маршруту к целевому парковочному месту на основе рабочей команды, полученной от оператора, содержащий:
в том случае, в котором расстояние между транспортным средством и обнаруженным вокруг транспортного средства объектом меньше заданного значения, когда выполнение первой инструкции управления приостанавливается или отменяется, вычисление второго маршрута для того, чтобы оставить транспортное средство с заданным или большим расстоянием от упомянутого объекта, обнаруженного вокруг транспортного средства, и вынуждение управляющего устройства выполнять вторую инструкцию управления для перемещения транспортного средства по второму маршруту.
2. Способ управления парковкой по п. 1, содержащий, когда выполнение первой инструкции управления транспортным средством приостанавливается или отменяется в положении, в котором по меньшей мере часть транспортного средства относится к целевому парковочному месту, вынуждение управляющего устройства выполнять вторую инструкцию управления для перемещения транспортного средства по второму маршруту.
3. Способ управления парковкой по п. 1 или 2, в котором второй маршрут представляет собой маршрут к месту покидания, которое устанавливают в положении с оставленным заданным или большим расстоянием от упомянутого объекта.
4. Способ управления парковкой по п. 3, содержащий
обнаружение упомянутого объекта, включая конструкцию целевого парковочного места,
при этом положение, в котором устанавливают место покидания, является положением, в котором между конструкцией и открывающейся частью транспортного средства, переместившегося в место покидания, образуется зазор, имеющий заданную или большую ширину.
5. Способ управления парковкой по п.4, содержащий:
обнаружение положения оператора и
формирование зазора, имеющего заданное или большее расстояние между конструкцией и открывающейся частью, ближайшей к положению оператора, среди множества открывающихся частей.
6. Способ управления парковкой по п.4 или 5, в котором открывающаяся часть является боковой открывающейся частью транспортного средства.
7. Способ управления парковкой по любому из пп.4-6, в котором открывающаяся часть является задней открывающейся частью транспортного средства.
8. Способ управления парковкой по любому из пп.4-7, в котором зазор формируют между въездом целевого парковочного места и открывающейся частью.
9. Устройство управления парковкой, содержащее управляющее устройство, выполненное с возможностью исполнения первой инструкции управления для перемещения транспортного средства по первому маршруту к целевому парковочному месту, на основе рабочей команды, полученной от оператора, причем управляющее устройство служит для того, чтобы в том случае, в котором расстояние между транспортным средством и обнаруженным вокруг транспортного средства объектом меньше заданного значения, когда выполнение первой инструкции управления приостанавливается или отменяется на основе результата обнаружения датчика транспортного средства, вычислять второй маршрут для того, чтобы оставить транспортное средство с заданным или большим расстоянием от упомянутого объекта, обнаруженного вокруг транспортного средства, и выполнять вторую инструкцию управления для перемещения транспортного средства по второму маршруту.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПАРКОВКЕ | 2009 |
|
RU2529078C2 |

