Изобретение относится к транспортному машиностроению и может быть использовано на подвесных канатных дорогах, а также на кабель-кранах, шагающих экскаваторах, для глубокого бурения нефтяных и газовых скважин, грузоподъемных кранов, лифтов, шахтных установок, талей, скриптовых подъемников, судовых подъемных устройств и дает возможность значительно расширить их функциональные возможности при эксплуатации.
Изобретение может быть использовано на подвесных канатных дорогах, кабель-кранах, шагающих экскаваторах, для глубокого бурения нефтяных и газовых скважин, грузоподъемных кранов, лифтов, шахтных установок, талей, скриптовых подъемников, судовых подъемных устройств и дает возможность значительно расширить их функциональные возможности при эксплуатации.
Известна конструкция стального каната (Авторское свидетельство SU №1803486, МПК D07B 1/16, от 23.03.1993, бюл. №11), имеющая сердечник, выполненный в виде капсул, заполненных ферромагнитной жидкостью, и эластичного магнитного материала, заполняющего зазоры между капсулами и прядями, при этом длина капсул равна шагу свивки прядей.
Данная конструкция каната позволяет увеличить долговечность каната и надежность его работы, но не предназначена для записи, хранения, считывания и переноса в пространстве и времени информации.
Из теории строительной механики стального каната известно, что у конструкций прядевых канатов (6-ти, 8-ми прядями и т.д.) существует только контакт с нижележащими слоями прядей, а между прядями в одном слое существует зазор. При изгибе каната на блоках (шкивах) пряди, опираясь в нижележащие слои, перекатываются по ним, сохраняя в одном слое зазор. Работа прядей каната в одном слое идентична работе подшипника качения с сепаратором. Нормальная работа каната происходит до тех пор, пока существует зазор в одном слое между прядями. В процессе эксплуатации зазор в одном слое уменьшается и, как следствие, пряди начинают соприкасаться между собой в одном слое, возникает контакт и, в том числе за счет сил трения, в канате происходит процесс зарождения и накапливания во времени дефектов. Например, в процессе упругопластического циклического деформирования, который характеризует деградационный процесс потери прочности последнего: внутренний износ; смятие; волнистость каната; изменения угла свивки; остаточное удлинение каната и др.
Известна конструкция стального каната фирмы «Pfaifer» (http://pfeifer-rossia.ru) с полимерным сердечником (DRAKO 8×19 - SFC) и с полимерным материалом между слоями прядей (DIEPA D1315 CZP, DIEPA Р825, DIEPA PZ 371), реализующий на практике теоретические закономерности строительной механики стального каната, а именно: зазор между прядями в одном слое заполняют полимерным материалом, тем самым предотвращая соприкосновение прядей при упругопластическом циклическом деформировании.
Предложенные фирмой «Pfaifer» конструкции стальных канатов с полимерным сердечником и с полимерным материалом между слоями прядей обладают рядом преимуществ, повышающим качество по сохранению стабильных во времени технических характеристик стального каната, однако, так же как и предыдущие конструкции, не предназначены для записи, хранения, считывания и переноса в пространстве и времени информации.
Известна конструкция стального каната, содержащая нанесенные на броню кабеля магнитные метки через одинаковые отрезки длины (Патент RU №2398106, МПК Е21В 47/04, опубл. 27.08.2010). Магнитные метки используются для измерения глубины каботажа путем подсчета их количества по длине каната. Одновременно подсчитывают наружные повивы брони кабеля и сравнивают их количество с соответствующими ранее запомненными значениями.
Недостатками является низкая помехоустойчивость от магнитных полей в скважине и, как следствие, низкая точность измеряемых параметров. К недостаткам магнитных меток, как информационного сигнала, следует отнести его дискретность по месту нанесения и протяженность по длине, недостаточная устойчивость во времени, зависимость от материала, из которого изготовлен канат, а также незначительный объем информации («да», «нет»), хранящейся на магнитной метке.
Известна конструкция стального каната, измерение длины которого определяется с использованием магнитных меток, наносимых в процессе изготовления непосредственно в технологической линии его производства, описанная в статье «Влияние скорости движения на результат измерения длины ферромагнитных изделий методом магнитных меток» авторов Гольдштейн А.Г., Уразбеков Е.И. (Известия Томского политехнического университета. 2006. Т. 309. №5. С. 148-151).
Конструкция с использованием магнитных меток предназначена только для измерения длины ферромагнитных изделий, в частности стальных канатов. Недостатком конструкции являются низкая точность измерения, вызванная деформацией магнитных меток, и их смещение в продольном направлении непосредственно в технологической линии его производства при изменении скорости движения.
Конструкция такого стального каната не предназначена для записи, хранения и переноса цифровой информации в пространстве и времени в процессе эксплуатации.
Известна конструкция линейного стального изделия, преимущественно из стальных труб, содержащая электронный маркер, такой как пассивная радиочастотная микросхема с антенной (Патент RU №2295140, МПК G01V 3/12, опубл. 10.04.2005). Конструкция линейного стального изделия используется в способе идентификации и слежения за имуществом. Антенна электрически соединена с реагирующим прибором-ответчиком, таким как радиочастотное идентификационное устройство, способным присоединяться к внешней и/или внутренней поверхности трубы. Приемопередатчик может перемещаться снаружи или внутри трубы, в том числе и на большом расстоянии от трубы. При этом обеспечивается связь между приемопередатчиком и реагирующим прибором безотносительно к ориентации трубы. Радиочастотное идентификационное устройство с антенной могут располагаться внутри желоба, выполненного вокруг всей внешней поверхности трубы.
Данная конструкция линейного стального изделия, используемая в способе идентификации и слежения за трубами в подземных скважинах, позволяет записывать, хранить, считывать и передавать цифровую информацию на расстоянии для идентификации и слежения, в том числе облегчает точный ввод данных об объекте в базу данных. Однако электронный маркер, такой как пассивная радиочастотная микросхема с антенной, не может быть механически вмонтированы в канат, тем более на канате нет возможности сделать какой-либо желоб на его поверхности, к тому же канат в процессе эксплуатации испытывает упругопластические циклические деформации.
Известно, что канаты являются невосстанавливаемыми изделиями, требующие замены при снижении прочности до критического состояния, когда невозможна их дальнейшая эксплуатация в результате появления дефектов, выявленных методами и средствами диагностирования.
Оценку безопасности при эксплуатации стальных канатов принято проводить на основе диагностических параметров. К последним относятся: изменение геометрии P1(t), коррозия и износ P2(t), обрывы проволок (усталость) P3(t), температурное воздействие P4(t) и пр. Здесь t - текущее время эксплуатации каната. Под диагностическими параметрами понимают величину Pi(t), представленную в виде: Pi(t)=Pio+Pi'(t), где Pio - склеромная часть, т.е. независимая от t и связанная с однократным приложением нагрузок; Pi'(t) - реономная часть, которая накапливается во времени, например в процессе упругопластического циклического деформирования.
Общий подход при дефектоскопии каната в период его эксплуатации, отражающий деградационный процесс потери прочности последнего, состоит в численной оценке хотя бы одного из показателей дефектов: не превысят ли браковочные показатели допустимые (предельные) значения, т.е. Pi(t)≤[Pi], где i=1÷4.
Известен способ дефектоскопии стальных канатов (Методические указания по магнитной дефектоскопии стальных канатов. РД 03-348-00. Утверждены постановлением Госгортехнадзора России от 30.03.2000 №11), заключающийся в периодическом замере магнитного потока вдоль каната, создаваемого измерительной катушкой. При использовании переменного магнитного поля магнитный поток вдоль продольной оси участка контролируемого каната создают посредством возбуждающей индуктивной катушки с переменным током, охватывающей канат. Измерительная катушка индуцирует электродвижущую силу (ЭДС), зависящую от площади поперечного сечения каната. Метод переменного магнитного поля используют, как правило, только для измерения потери металлической площади сечения канатов.
Метод постоянного магнитного поля используют как для измерения потери площади сечения каната, так и для обнаружения локальных дефектов. Постоянный магнитный поток вдоль продольной оси участка контролируемого каната создают постоянными магнитами или электромагнитами постоянного тока. Общий магнитный поток (или часть этого потока) измеряют датчиками Холла, либо другими датчиками, пригодными для измерения абсолютного значения магнитного потока или изменений этого потока. Сигнал датчиков зависит от магнитного потока через участок контролируемого каната и, следовательно, от площади металлического сечения этого участка. Локальные дефекты каната, например обрывы проволок, создают поблизости магнитные потоки рассеяния, регистрируемые датчиками Холла, катушками или другими магниточувствительными элементами. Сигналы датчиков зависят не только от размеров локальных дефектов, но и от их типа и положения. Поэтому определить количественно параметры дефектов обычно затруднительно. Качественный анализ полученной информации о локальных дефектах выполняют по дефектограммам на основании накопленного опыта.
Метод дефектоскопии предназначен только для стальных канатов при оценке потери его металлического сечения и обрывов проволок. Оценивать другие параметры, например величину зазора между прядями стального каната, данный метод дефектоскопии не предназначен. Метод также не может быть применен для канатов, изготовленных из неферромагнитного материала.
Известен способ браковки каната, описанный в патенте RU №2299939, МПК D07B 1/14, опубл. 27.05.2007, бюл. №15, содержащий в наружном слое ограниченное число индикаторных проволок, форма которых аналогична основным проволокам стального каната. Индикаторные проволоки изготовлены полыми по всей длине из материала с температурой плавления не более 300°С. Полости индикаторных проволок заполнены красящим веществом. Количество индикаторных проволок в стальном канате не больше браковочного показателя по числу обрывов наружных проволок для данной конструкции стального каната, направления свивки и группы классификации механизма, где эксплуатируется стальной канат. Способ дефектоскопии стального каната заключается в обнаружении следов красящего вещества на поверхности каната, образовавшихся в результате разгерметизации полости индикаторной проволоки. Однако описанный способ невозможно применить при дефектоскопии величины зазора между прядями каната в одном слое.
Известна конструкция стального многопрядного каната с металлическим сердечником (Патент RU ПМ №187427, МПК D07B 1/00, опубл. 05.03.2019, бюл. №7), обеспечивающего мониторинг технических характеристик с неподвижного или движущего каната в режиме текущего времени. Считывание и передача информации с датчиков контроля технического состояния многопрядного каната в режиме текущего времени осуществляется по модулю с оптическими волокнами, встроенному в стальной канат. Модуль с оптическими волокнами может быть встроен как в центре многопрядного каната, так и в случае многопрядного каната с органическим или минеральным сердечником в наружных прядях каната.
Недостатком такого каната является конструктивно-технологическая сложность изготовления модуля с оптическим волокном, невозможность подключения датчиков контроля технического состояния каната, считывающего измеряющего устройства к оптоволоконной линии на кольцевых подвесных канатных дорогах.
Известен способ счалки каната (Патент RU №2687981, МПК D07B 9/00, D07B 7/16, F16G 9/00, опубл. 17.05.2019), содержащий полимерный сердечник, выполненный в форме цилиндра, наружная часть которого в поперечном сечении выполняют в форме звезды с числом лучей, равным числу прядей, и высотой лучей не менее половины диаметра пряди, с радиусом сегментов между лучами, выполненным равным диаметру прядей, при этом лучи в вершине выполнены в форме ласточкиного хвоста.
В процессе эксплуатации, при многократном огибании несуще-тяговым канатом отклоняющего или приводного шкива (барабана) происходит взаимное перемещение прядей. Прядь, опираясь на сердцевину, имеет продольное и угловое перемещение, при сохранении тангенциального зазора между прядями. Отсутствие тангенциального зазора или отсутствие подвижности прядей, приводит к «закусыванию» пряди и, как следствие, к перераспределению суммарной нагрузки между прядями, что в конечном итоге приводит к образованию дефекта.
Известен способ дистанционного контроля безопасности при эксплуатации объекта на базе цифровых информационно-технологических систем (Патент RU №2682020, МПК G06K 17/00, опубл. 14.03.2019, бюл. №8), обеспечивающий управление и контроль за эксплуатацией технических объектов на основе оценки риска в цветовой гамме, получаемой за счет обработки данных контроля как технического состояния объекта, так и периодической проверки локальной системы безопасности объекта, в результате которых определяют указанные риски и передают их для учета администрирования по степени и уровню конфиденциальности.
Недостатком указанного способа является выражение степени риска в виде цветовой гаммы из двух цветов (красный - работа запрещена; зеленый - работа разрешена) и не учитывается вариант допуска объекта к эксплуатации, но с ограничениями.
Наиболее близким техническим решениям, взятым за прототип, к конструкции несуще-тягового каната и способа его дефектоскопии является изобретение «Канат и способ его дефектоскопии» (Патент RU №2489542, МПК D07B 1/00, опубл. 10.08.2013).
В изобретении предложена конструкция каната, содержащая органический сердечник с дискретно интегрированными в его структуру электронными маркерами - RFID транспондерами (у нас электронные сенсоры) с количеством антенн не менее числа зазоров между прядями в одном слое, а их размер в поперечном сечении обеспечивает размещение антенн в зазорах между прядями в одном слое. Антенны выполнены из немагнитного материала, покрыты изоляционным слоем и уложены в зазоры между прядями в одном слое, причем зазоры заполнены полимерным материалом.
Недостатком прототипа является отсутствие возможности осуществлять запись, хранение, считывание и передачу информации по положению каната относительно продольной оси.
Способ дефектоскопии каната, заключающийся в разрушении интегрированных в его структуру индикаторных элементов. В качестве индикаторного элемента используют антенны из немагнитного материала, покрытые изоляционным слоем электронных маркеров - RFID транспондеров, и выявляют дефекты по потере сигнала от дискретно интегрированных электронных маркеров - RFID транспондеров, в результате разрушения изоляционного слоя или самого немагнитного материала антенны из-за уменьшения зазора между прядями в одном слое каната. Этот факт свидетельствует о наличии дефекта в виде отсутствия зазора между прядями в одном слое в месте расположения электронного маркера - RFID транспондера.
Однако способ дефектоскопии каната позволяет определить лишь отсутствие зазора между прядями и не дает информации о его кручении, параметр которых является одним из браковочных показателей.
Задачей, на решение которой направлено данное изобретение, состоит в повышении безопасной эксплуатации кольцевых подвесных канатных дорог, использующих несуще-тяговые канаты предложенной конструкции, за счет исключения из части действий и операций по контролю браковочных показателей обслуживающего персонала (сокращение участия человеческого фактора).
Технический результат изобретения, в части конструкции и способа дефектоскопии, состоит в создании продукта интернета вещей для использования в повседневной жизни технологий при эксплуатации кольцевых подвесных канатных дорог, которые позволяют создавать вычислительную рекомендательную систему принятия решения обслуживающему персоналу по вопросам безопасности, устранив при этом субъективность человеческого мышления.
Для достижения технического результата несуще-тяговый канат кольцевых подвесных канатных дорог с промежуточными опорами, содержит навитые на сердечник наружные пряди, свитые из проволок, с дискретно интегрированным в его структуру электронными сенсорами с количеством приемо-передающих сигнал антенн не менее числа зазоров между наружными прядями в одном слое, при этом размер каждого из зазоров обеспечивает размещение антенн между наружными прядями в одном слое, причем несуще-тяговый канат содержит конструктивную и программно-аппаратную части, конструктивная часть выполнена как физический предмет продукта интернета вещей, программно-аппаратная часть, выполнена как технология для взаимодействия с внешней средой: конструктивная часть состоит из сердечника, выполненного из полимерного материала, в форме звезды с числом лучей равным числу прядей и высотой лучей не менее половины диаметра пряди, при этом лучи имеют толщину, равную величине зазора между наружными прядями, а в вершине они выполнены в форме ласточкиного хвоста, электронные сенсоры выполнены в виде гравитационных датчиков с возможностью замерять и передавать сигнал об угле поворота несуще-тягового каната вокруг своей оси непрерывно в процессе эксплуатации; программно-аппаратная часть содержит установленные на промежуточных опорах приемники с роутерами, для дистанционной связи с базой данных на сервере, расположенном в облачном пространстве сети Интернет и мобильные устройства с программными приложениями для связи с сервером, позволяют обслуживающему персоналу взаимодействовать с сервером дистанционно.
Технический результат в части способа достигается тем, что способ дефектоскопии несуще-тягового каната кольцевых подвесных канатных дорог с промежуточными опорами, заключающийся в разрушении интегрированных в его структуру антенн, приемо-передающими сигнал от электронных сенсоров, получении сигнала об их разрушении, и оценке по ним дефекта отсутствия зазоров между наружными прядями в одном слое каната, причем используют несуще-тяговый канат, содержащий конструктивную и программно-аппаратную части, конструктивную часть выполняют как физический предмет продукта интернета вещей, программно-аппаратную часть, выполняют как технологию для взаимодействия с внешней средой, получают с электронных сенсоров, выполненных в виде гравитационных датчиков, цифровую информацию о фактической величине угла поворота вокруг продольной оси, на основании которых проводят непрерывную в пространстве и времени дистанционную интегральную оценку браковочных показателей несуще-тягового каната, при этом цифровую информацию считывают посредством приемников с роутерами, которые дискретно устанавливают на промежуточных опорах, с возможностью передачи цифровой информации в базу данных на сервере, расположенном в облачном пространстве сети Интернет, а взаимодействие с внешней средой происходит через мобильные устройства и программные приложения к ним для связи с сервером и пользователем, обеспечивающим размещение в базе данных на сервере цифровую информацию о текущих функциональных браковочных показателях периодической дефектоскопии и лингвистическую информацию визуально-измерительного контроля, затем цифровую и лингвистическую информацию обрабатывают на сервере с возможностью получения интегральной оценки риска по браковочным показателям, и интерпретируют в цветовую гамму, с возможностью отображения на мобильные устройства, учитывая уровень их доступности и конфиденциальности.
Сущность предложенного изобретения поясняется чертежами:
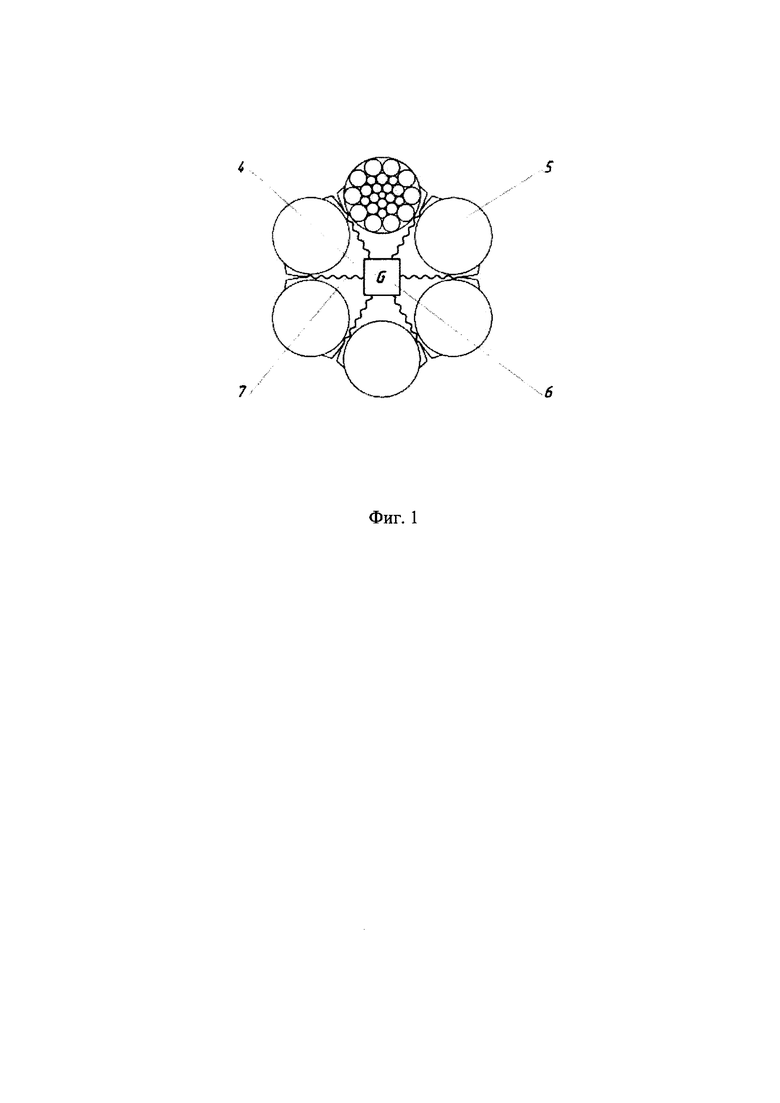
Фиг. 1 - Несуще-тяговый канат кольцевых подвесных дорог в разрезе.
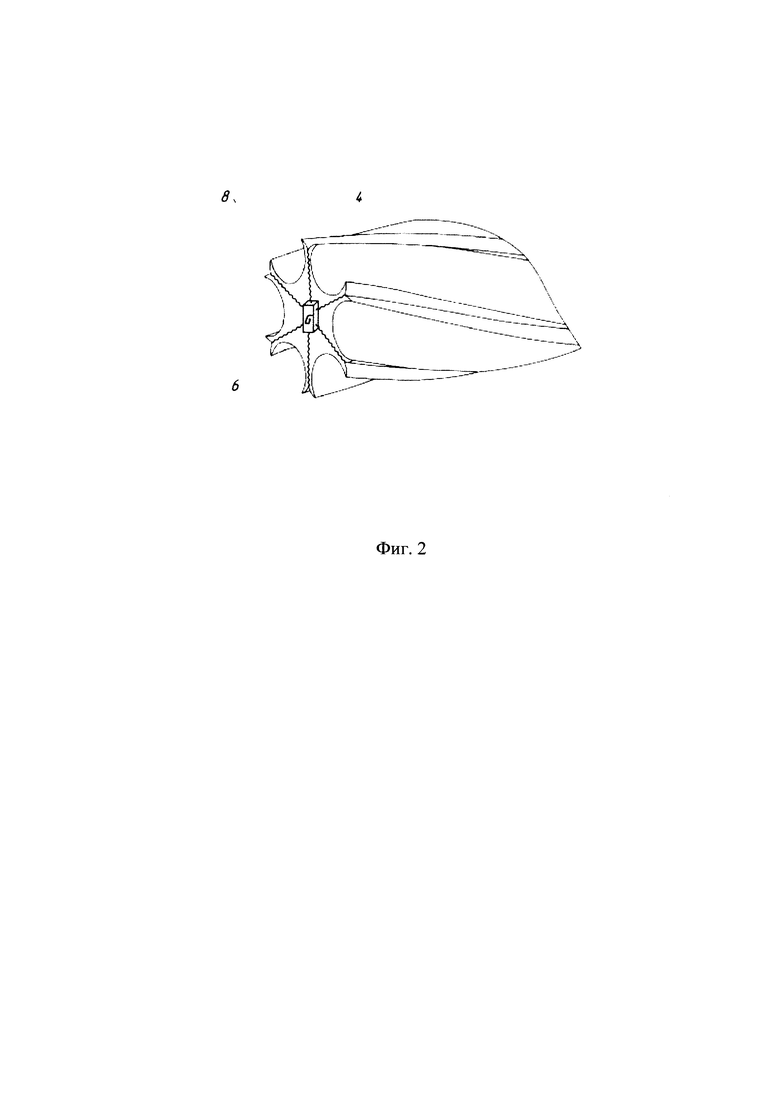
Фиг. 2 - Органический сердечник несуще-тягового каната;
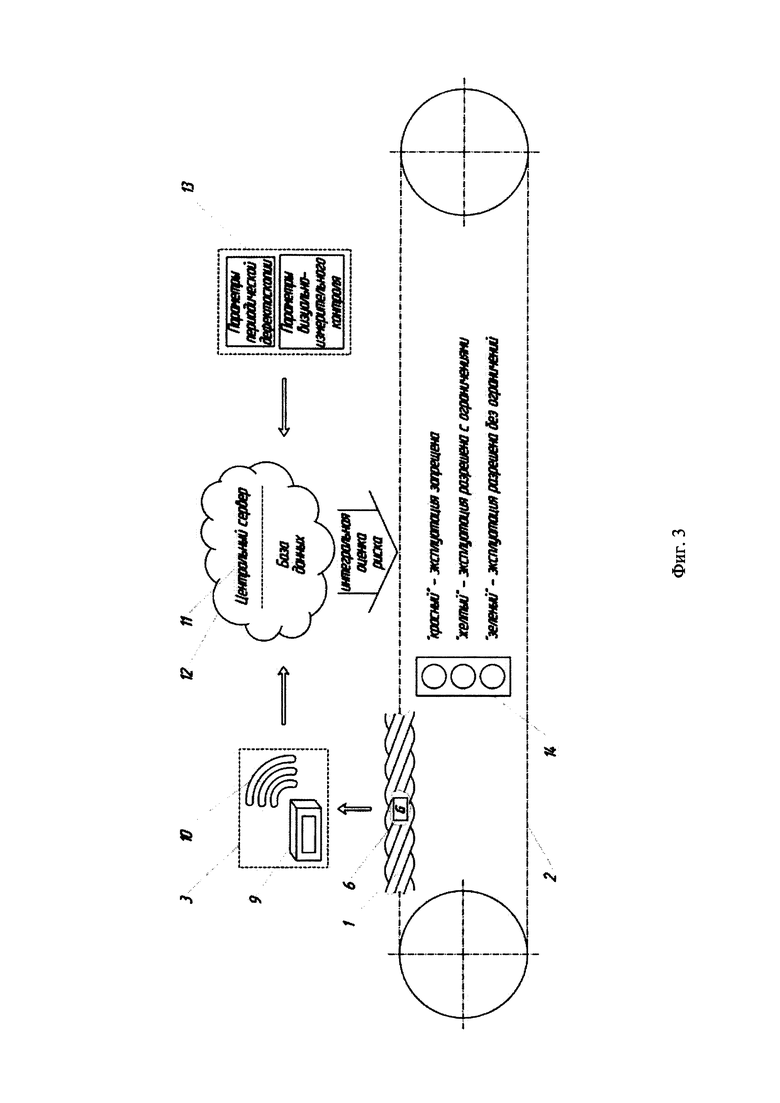
Фиг. 3 - Функционирования схема способа дефектоскопии несуще-тягового каната.
В таблице приведены номера позиций, используемых в описании и на фигурах:
Несуще-тяговый канат 1 кольцевых подвесных канатных дорог 2 с промежуточными опорами 3, содержит навитые на сердечник 4 пряди 5, свитые из проволок, с дискретно интегрированным в его структуру электронными сенсорами 6 с количеством приемо-передающих сигнал антенн 7 не менее числа зазоров между прядями 5 в одном слое, при этом размер каждого из зазоров обеспечивает размещение антенн 7 в одном слое наружных прядей 5, дополнительно содержит конструктивную часть, выполненную как физический предмет продукта интернета вещей, программно-аппаратную часть, выполненную как технология для взаимодействия с внешней средой: конструктивная часть состоит из сердечника 4, выполненного из полимерного материала, в форме звезды с числом лучей 8, равным числу наружных прядей 5, и высотой лучей 8 не менее половины диаметра наружных прядей 5, при этом лучи 8 имеют толщину, равную величине зазора между наружными прядями 5, а в вершине они выполнены в форме ласточкиного хвоста, электронные сенсоры 7 выполнены в виде гравитационных датчиков с возможностью замерять и передавать сигнал об угле поворота несуще-тягового каната 1 вокруг своей оси непрерывно в процессе эксплуатации; программно-аппаратная часть содержит установленные на промежуточных опорах приемники 9 с роутерами 10, для дистанционной связи с базой данных на сервере 11, расположенном в облачном пространстве сети Интернет 12 и мобильные устройства 13 с программными приложениями для связи с сервером.
Изготовление несуще-тягового каната 1 предложенной конструкции происходит следующим образом. На первом этапе из проволок свивают наружные пряди 5. Затем изготавливают органический сердечник 4 (фиг. 2). Органический сердечник 4 выполнен из полимерного материала и может быть изготовлен из бакелита, эпоксидных смол, резины или других материалов, имеющих механические свойства аналогичные пластмассам или резинам. При изготовлении органического сердечника 4 в него интегрируют электронные сенсоры 6 в виде гравитационных датчиков, с количеством антенн 7 не менее числа зазоров между наружными прядями 5 в одном слое, а их размер в поперечном сечении обеспечивает размещение антенн 7 в зазорах между наружными прядями 5. Антенны 7 выполнены из немагнитного материала, покрыты изоляционным слоем и уложены в зазоры между наружными прядями 5 в одном слое, причем зазоры заполнены полимерным материалом. Завершающим этапом, при изготовлении несуще-тягового каната 1, является свивка наружных прядей 5 вокруг органического сердечника 4, с интегрированными по его длине электронными сенсорами 6, выполненными в виде гравитационных датчиков, с антеннами 7 так, что антенны 7 укладываются во внутрь лучей 8, расположенных в зазорах между наружными прядями 5.
Способ дефектоскопии несуще-тягового каната 1 кольцевых подвесных канатных дорог 2 с промежуточными опорами 3 заключается в использовании технологии продукта интернета вещей, с помощью которого проводят непрерывную в пространстве и времени дистанционную интегральную оценку браковочных показателей, при этом цифровую информацию считывают посредством приемников 9 с роутерами 10, передают в базу данных на сервере 11, расположенном в облачном пространстве сети Интернет 12, а взаимодействие с внешней средой происходит через мобильные устройства 13 с программными приложениями к ним для связи с сервером 11 и пользователем (обслуживающим персоналом), обеспечивающим размещение в базе данных на сервере 11 цифровой информации о функциональных текущих браковочных показателях периодической дефектоскопии и лингвистическую информацию визуально-измерительного контроля. В дальнейшем цифровую информацию обрабатывают на сервере 11 по алгоритму с учетом весовых коэффициентов для получения интегральной оценки риска несуще-тягового каната 1 по браковочным показателям, которая интерпретируется в цветовую гамму 14, с отображением на мобильные устройства 13, учитывая уровень их доступности и конфиденциальности.
Способ дефектоскопии несуще-тягового каната 1 кольцевых подвесных канатных дорог 2 с промежуточными опорами 3 использует технологию интернета вещей, содержащую конструктивную и программно-аппаратную части. Конструктивную часть выполняют как физический предмет продукта интернета вещей, программно-аппаратную часть выполняют как технологию для взаимодействия с внешней средой. В процессе эксплуатации кольцевых подвесных канатных дорог 2, несуще-тяговый канат 1 осуществляет круговые циклические движения, при этом опирается на промежуточные опоры 3. Несуще-тяговый канат 1, содержащий электронные сенсоры 6, при прохождении промежуточной опоры 3, на которой установлены неподвижно приемники 9 с роутерами 10, считывается цифровая информация электромагнитным полем неподвижного приемника 9 от электронных сенсоров 6, содержащая показания угла поворота несуще-тягового каната 1 вокруг его продольной оси и целостности антенн 7, в пространстве и времени. Считанная цифровая информация электромагнитным полем неподвижного приемника 9 с помощью роутера 10 по сети Интернет передается в базу данных на сервер 11, расположенный в облачном пространстве сети Интернет 12. Взаимодействие сервера 11 с пользователем (обслуживающим персоналом) в процессе эксплуатации происходит через мобильные устройства 13 и программные приложения к ним. Пользователь, через мобильные устройства 13 и программные приложения к ним, размещает в базе данных на сервере 11 цифровую информацию о текущих браковочных показателях функциональной периодической дефектоскопии и лингвистическую информацию визуально-измерительного контроля. Поступившая в базу данных цифровая информация обрабатывается на сервере 11 по алгоритму, с учетом весовых коэффициентов, для получения интегральной оценки риска по браковочным показателям, которая затем интерпретируется в цветовую гамму 14. Одновременно цветовая гамма 14 отображается на мобильные устройства 13 пользователей (обслуживающего персонала), учитывая уровень их доступности и конфиденциальности. Цветовая гамма 14 имеет три цвета, рекомендующие принимать решения обслуживающему персоналу по вопросам безопасной эксплуатации: запретить - «красный»; разрешена с ограничениями - «желтый»; разрешена без ограничений - «зеленый».
Показатели функциональной дефектоскопии несуще-тягового каната 1 представляют собой цифровую информацию, полученную с использованием приборного обеспечения. К такой цифровой информации может быть отнесена: количество обрывов проволок на шаге свивки или длине 30 диаметров; потеря металлического сечения на конкретном участке длины и др.
К показателям лингвистической информации по результатам визуально-измерительного контроля следует отнести информацию, полученную обслуживающим персоналом с использованием мерительного инструмента, например: величина наружного износа проволок; диаметр каната; параметры волнистости; воздействие электрического тока от грозы и др.
Таким образом, предложенный способ дефектоскопии несуще-тягового каната 1 позволяет непрерывно, удаленно, в пространстве и времени интегрально оценивать браковочные показатели применяемой на подвесной канатной дороге 2 с промежуточными опорами 3. К браковочным показателям, описанным в предложенном способе, относятся: зазоры между прядями 5 наружного слоя; фактическая величина угла поворота вокруг продольной оси; функциональные браковочные показатели периодической дефектоскопии; результаты визуально-измерительного контроля. В дальнейшем, по мере выявления и обоснования других браковочных показателей, они могут быть учтены при интегральной оценке, т.к. созданный способ, основанный на продукте интернета вещей, является открытым, доступным и перепрограммируемым.
Предложенное техническое решение по оценке безопасности интегральными браковочными показателями несуще-тягового каната может быть использовано на подвесных канатных дорогах, кабель-кранах, шагающих экскаваторах, для глубокого бурения нефтяных и газовых скважин, грузоподъемных кранов, лифтов, шахтных установок, талей, скриптовых подъемников, судовых подъемных устройств и дает возможность значительно расширить их функциональные возможности при эксплуатации.
Предложенная конструкция каната открывает новые возможности применения этого изделия в еще неосвоенных областях техники и технологии, а именно позволяет дистанционно, непрерывно, в пространстве и времени нести информацию об объекте, его свойствах, качестве и безопасности.
Работоспособность предложенной конструкции несуще-тягового каната и способ его дефектоскопии проверена в лабораторных условиях на макетах и моделях.
Для испытания физическим предметом продукта интернета вещей был использован несуще-тяговый канат с полимерным сердечником диаметром 36 мм, конструкции 36 мм 6 × 19S SFC vz. 1960 Н/мм2, изготовленный по EN 12385 - 4. и гироскоп модели Troyka-модуль.
Программно-аппаратная часть построена с использованием контроллера Arduino Nano, беспроводного передатчика на 433 МГц и беспроводного приемника на 433 МГц. В качестве роутера применена модель IRZ RL22W (GPS 4G).
База данных построена при помощи технологии Microsoft SQL Server Management Studio 2017. Серверное ядро разработано в соответствии со следующими требованиями: NET Core 3.0 (целевая рабочая среда); SQL Server 2016 Express (локальная база данных); Microsoft SQL Server Management Studio 2017 (интегрированная среда для управления инфраструктурой SQL).
Для реализации обмена данными между сенсором и сервером разработан веб-сайт на платформе ASP. NET Core, являющейся кроссплатформенной, высокопроизводительной средой с открытым исходным кодом для создания современных облачных приложений, подключенных к Интернету.
Веб-интерфейс реализован на основе Razor Pages, которая позволяет создавать страницы с кодом Razor для обработки запросы. На стороне пользователя обрабатываются веб-формы с использованием языка программирования JavaScript.
Среда разработки программного обеспечения мобильных приложений: NET Framework: минимум NET 4.5.1 до.NET 4.7; командная строка (необязательно); Visual Studio Code (дополнительный текстовый редактор); SQL Server 2016 Express (необязательно).
Проведенные испытания показали реализуемость предлагаемой конструкции каната и способа его дефектоскопии.
На основании вышеизложенного и с учетом проведенного патентно-информационного поиска считаем, что предлагаемый авторами «Несуще-тяговый канат и способ его дефектоскопии» может быть признан изобретением и защищен патентом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ визуально-измерительного контроля стального каната | 2021 |
|
RU2775348C1 |
| КАНАТ И СПОСОБ ЕГО ДЕФЕКТОСКОПИИ | 2012 |
|
RU2489542C1 |
| Способ счалки каната | 2018 |
|
RU2687981C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА С МЕХАТРОННЫМИ ДВИЖИТЕЛЯМИ | 2012 |
|
RU2507095C1 |
| КОНСТРУКЦИЯ СТАЛЬНОГО КАНАТА ЗАКРЫТОГО ТИПА | 2005 |
|
RU2299940C1 |
| СТАЛЬНОЙ КАНАТ И СПОСОБ ЕГО БРАКОВКИ | 2005 |
|
RU2299939C2 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2010 |
|
RU2412840C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ("КАНАТНОЕ МЕТРО") | 2012 |
|
RU2506182C1 |
| Контейнер-трансформер (SmartBoxCity) | 2020 |
|
RU2725576C1 |
| МОБИЛЬНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2005 |
|
RU2269443C1 |
Изобретение относится к транспортному машиностроению и может быть использовано на подвесных канатных дорогах, а также на кабель-кранах, шагающих экскаваторах, для глубокого бурения нефтяных и газовых скважин, грузоподъемных кранов, лифтов, шахтных установок, талей, скриптовых подъемников, судовых подъемных устройств и дает возможность значительно расширить их функциональные возможности при эксплуатации. Изобретение направлено на повышение безопасной эксплуатации кольцевых подвесных канатных дорог, использующих несуще-тяговые канаты, за счет исключения из части действий и операций по контролю браковочных показателей обслуживающего персонала, а также использования продукта интернета вещей, при эксплуатации кольцевых подвесных канатных дорог, которые позволяют создавать вычислительную рекомендательную систему принятия решения обслуживающему персоналу по вопросам безопасности, устранив при этом субъективность человеческого мышления. 2 н.п. ф-лы, 1 табл., 3 ил.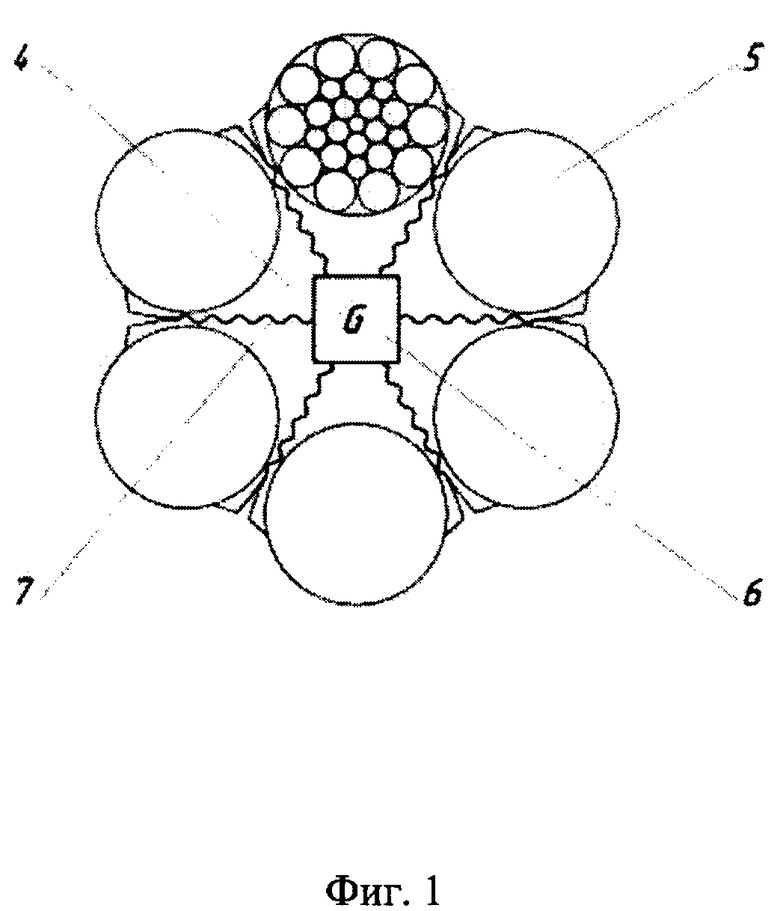
1. Несуще-тяговый канат кольцевой подвесной канатной дороги с промежуточными опорами содержит навитые на сердечник наружные пряди, свитые из проволок, с дискретно интегрированными в его структуру электронными сенсорами с количеством приемо-передающих сигнал антенн не менее числа зазоров между наружными прядями в одном слое, при этом размер каждого из зазоров обеспечивает размещение антенн между наружными прядями в одном слое, отличающийся тем, что несуще-тяговый канат содержит конструктивную и программно-аппаратную части, конструктивная часть выполнена как физический предмет продукта интернета вещей, программно-аппаратная часть выполнена как технология для взаимодействия с внешней средой: конструктивная часть состоит из сердечника, выполненного из полимерного материала, в форме звезды с числом лучей, равным числу прядей, и высотой лучей не менее половины диаметра пряди, при этом лучи имеют толщину, равную величине зазора между наружными прядями, а в вершине они выполнены в форме ласточкиного хвоста, электронные сенсоры выполнены в виде гравитационных датчиков с возможностью замерять и передавать сигнал об угле поворота несуще-тягового каната вокруг своей оси непрерывно в процессе эксплуатации; программно-аппаратная часть содержит установленные на промежуточных опорах приемники с роутерами, для дистанционной связи с базой данных на сервере, расположенном в облачном пространстве сети интернет, и мобильные устройства с программными приложениями для связи с сервером.
2. Способ дефектоскопии несуще-тягового каната кольцевых подвесных канатных дорог с промежуточными опорами, заключающийся в разрушении интегрированных в его структуру антенн, приемо-передающих сигнал от электронных сенсоров, получении сигнала об их разрушении и оценке по ним дефекта отсутствия зазоров между наружными прядями в одном слое каната, отличающийся тем, что используют несуще-тяговый канат, содержащий конструктивную и программно-аппаратную части, конструктивную часть выполняют как физический предмет продукта интернета вещей, программно-аппаратную часть выполняют как технологию для взаимодействия с внешней средой, получают с электронных сенсоров, выполненных в виде гравитационных датчиков, цифровую информацию о фактической величине угла поворота вокруг продольной оси, на основании которой проводят непрерывную в пространстве и времени дистанционную интегральную оценку браковочных показателей несуще-тягового каната, при этом цифровую информацию считывают посредством приемников с роутерами, которые дискретно устанавливают на промежуточных опорах, с возможностью передачи цифровой информации в базу данных на сервере, расположенном в облачном пространстве сети интернет, а взаимодействие с внешней средой происходит через мобильные устройства и программные приложения к ним для связи с сервером и пользователем, обеспечивающим размещение в базе данных на сервере цифровой информации о текущих функциональных браковочных показателях периодической дефектоскопии и лингвистической информации визуально-измерительного контроля, затем цифровую и лингвистическую информацию обрабатывают на сервере с возможностью получения интегральной оценки риска по браковочным показателям, и интерпретируют в цветовую гамму, с возможностью отображения на мобильные устройства, учитывая уровень их доступности и конфиденциальности.
| КАНАТ И СПОСОБ ЕГО ДЕФЕКТОСКОПИИ | 2012 |
|
RU2489542C1 |
| DE 19601707 A1, 25.07.1996 | |||
| ИНСТРУМЕНТ ДЛЯ ОБЪЕМНОЙ ШТАМПОВКИ ЧАШИ - ПОЛУФАБРИКАТА КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2277993C1 |
| Способ дистанционного контроля безопасности при эксплуатации объекта на базе цифровых информационно-технологических систем | 2018 |
|
RU2682020C1 |
| Способ счалки каната | 2018 |
|
RU2687981C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА С МЕХАТРОННЫМИ ДВИЖИТЕЛЯМИ | 2012 |
|
RU2507095C1 |
| KR 101780937 B1, 26.09.2017 | |||
| US 20190178734 A1, 13.06.2019. | |||

