Изобретение относится к конструкциям ультразвуковых преобразователей, предназначенных для неразрушающего контроля различных изделий, которые, в частности, могут использоваться для контроля сварных швов космических аппаратов и потенциально-опасных промышленных объектов.
Широко известны конструкции наклонных ультразвуковых пьезоэлектрических преобразователей (ПЭП). Типовой наклонный ПЭП (см., например, публикацию в книге: Неразрушающий контроль. Книга 2. Акустические методы контроля. Под ред. В.В. Сухорукова. М.: Высшая школа, 1991, с. 101-102) включает призму, изготовленную, как правило, из пластика, с наклеенным на неё пьезоэлементом, который, как правило, представляет собой относительно хрупкую плоскую пластинку, выполненную из пьезокерамики или пьезокварца, при этом соответствующий участок активной поверхности призмы, на который наклеивается пьезоэлемент, также выполнен плоским.
Известно, что направление излучения/приёма ПЭП определяется по закону Снеллиуса и зависит от угла призмы. Угловая ширина диаграммы направленности такого ПЭП в плоскости падения ультразвуковой волны зависит от ширины пьезоэлемента и может быть определена по формуле:
Sin dα ≈ λ/b (1), где:
α - угол распространения ультразвуковой волны;
λ - длина волны в призме;
b – ширина пьезоэлемента.
Таким образом, угол распространения ультразвуковой волны, возбуждаемой в изделии, и угловая ширина диаграммы направленности в нём могут быть рассчитаны исходя из соотношения скоростей упругих колебаний соответственно в материалах призмы и объекта контроля.
Из формулы (1) следует следующая закономерность: чем больше ширина пьезоэлемента b, тем уже диаграмма направленности ультразвукового преобразователя, и наоборот для получения широкой диаграммы направленности (что требуется для решения целого ряда важных практических задач ультразвукового контроля), необходимо уменьшать размер пьезоэлемента. Однако, при этом, чем меньше размер пьезоэлемента, тем меньше энергии вводится в объект контроля, и, соответственно, тем будет ниже чувствительность и помехозащищенность ультразвукового контроля. Это является существенным недостатком всех известных наклонных ПЭП. Другим недостатком таких ПЭП является то, что невозможно управлять параметрами их диаграмм направленности, что существенно сужает возможности их практического применения.
Также известны конструкции ПЭП типа фазированной решетки (ФР) (см., например, публикацию в сети Интернет по ссылке: https://www.pergam.ru/press/blogs/uz-control.htm). ФР представляет собой совокупность нескольких активных элементов, конструктивно объединенных в один составной пьезоэлемент. Такая конструкция позволяет электронным образом изменять угол наклона луча и его фокусировку, за счёт чего повышается чувствительность ФР.
При этом такой пьезоэлемент ФР обычно также представляет собой плоскую пластинку, изготовленную из хрупкой композитной керамики, а соответствующий участок активной поверхности призмы, на который наклеивается такой пьезоэлемент, также выполнен плоским.
ФР работает следующим образом: направление излучения/приёма ультразвуковых волн определяется задержками в работе генераторов и/или приёмников, подключенных к соответствующим активным элементам, при этом для изменения угловой ширины диаграммы направленности необходимо обеспечить определенный набор задержек.
Максимальный диапазон углов, реализуемый ФР, может быть определён по формуле 2, которая аналогична формуле 1, но в данном случае b – это ширина одного активного элемента ФР в плоскости, параллельной плоскости падения ультразвуковых волн.
Sin dα ≈ λ/b (2), где:
α - угол распространения ультразвуковой волны;
λ – длина волны в призме;
b – ширина активного элемента ФР.
При этом, для того, чтобы ФР обладала диапазоном углов в призме не менее 450, ширина её активного элемента должна быть менее 1,4λ. При этом, на частоте 10 МГц длина продольной волны, например, в рексолайте (самый распространенный высококачественный материал, используемый для изготовления призм) составляет 0,24 мм. Таким образом, максимально допустимая ширина активного элемента, которая требуется для достижения заданной угловой ширины диаграммы направленности dα = 450, должна удовлетворять условию: b ≤ 1,4 х 0,24 = 0,34 мм. Это значение близко к пределу технологических возможностей использования ФР, так как создание хорошей высокочастотной ФР с очень узкими активными элементами представляет собой весьма сложную техническую задачу. Поэтому, все ФР имеют принципиальное физическое ограничение по частоте. Эта физическая граница реализуемости ФР по рабочей частоте для большей части имеющихся на рынке преобразователей, лежит в районе 2 – 8 МГц, что может быть недостаточным, например, при производстве высокочувствительной аппаратуры для контроля сварных швов космических аппаратов. При этом, как следует из формулы (2), повышение рабочей частоты при фиксированном значении b приводит к существенному сужению диапазона углов, обеспечиваемых ФР, так, при b = 3λ, диапазон доступных углов dα составит всего лишь 19,50, что для широкого спектра практических задач является абсолютно недостаточным.
В итоге, для получения достаточного диапазона рабочих углов, ширина активных элементов ФР должна находится в диапазоне b ≈ (0,5÷1,5) λ, что в случая их использования в высокочастотных ФР является трудновыполнимой или вовсе невыполнимой технической проблемой.
Другим недостатком ФР является то обстоятельство, что положение точки выхода центрального луча ультразвуковой волны из призмы не является постоянным и существенно зависит от значения его установленного угла. Это приводит к необходимости учёта изменения положения точки выхода, а, следовательно, стрелы ультразвукового преобразователя при расшифровке результатов контроля и определении координат обнаруженного дефекта.
Еще одним недостатком ФР является сравнительная сложность и, соответственно, высокая стоимость подключаемой к ней электронной аппаратуры. Это обусловлено тем, что для обеспечения необходимой равномерности диаграммы направленности, чувствительности и избирательности по углу, ФР должна иметь достаточно большое количество N активных элементов. Обычно значение N находится в интервале N = 8 ÷ 128. Поскольку каждый активный элемент соединен, как правило, с собственным генератором и собственным приемником, то требуется большой объем дефектоскопической электроники. Кроме того, поскольку управление задержками является необходимым условием работоспособности ФР, как устройства с изменяемыми полевыми характеристиками, то необходимость организации программируемых задержек в работе генераторов и приемников многократно и качественным образом усложняет аппаратуру, и, соответственно, приводит к её значительному удорожанию.
Технической проблемой, решаемой с помощью настоящего изобретения, являются существующие физические и технологические ограничения по применению ПЭП.
Техническим результатом, достигаемым с помощью настоящего изобретения, является расширение возможностей применения ПЭП, а именно:
- расширение диапазона рабочих углов ПЭП, а также расширение диаграммы его направленности;
- расширение диапазона рабочих частот ПЭП (преимущественно, в сторону высоких частот);
- упрощение и удешевление дефектоскопической электроники при одновременном сохранении возможности электронного управления шириной диаграммы направленности и направлением ее главного максимума.
Указанный технический результат достигается за счёт применения конструкции ультразвукового преобразователя, включающего в себя призму с активной поверхностью, которая имеет цилиндрическую форму (выпуклую или вогнутую), на которой закреплён (например, с помощью клея), как минимум один пьезоэлемент, выполненный в виде гибкой пьезоэлектрической плёнки, которая, при наклейке на активную поверхность, принимает её форму, при этом ось активной поверхности расположена перпендикулярно плоскости падения ультразвуковой волны, причём суммарная ширина В пьезоэлементов, их расположение на призме, материал призмы, радиус кривизны активной поверхности и требуемые угловые характеристики в геометрическом приближении связаны между собой системой уравнений (3) и (4):
dα = α2 - α1 = B/R (3)
dβ = β2 - β1 = Arcsin (C2 x Sin α2/C1) – Arcsin (C2 x Sin α1/C1) (4),
где:
dα, dβ – желаемые диапазоны углов возбуждения и/или приёма ультразвуковых волн в материалах призмы и объекта контроля соответственно;
α1, α2 – угловые границы диаграммы направленности в материале призмы;
β1 и β2 – желаемые угловые границы диаграммы направленности в материале объекта контроля,
С1 и С2 – скорости упругих волн соответственно в материале призмы и в материале объекта контроля;
В – суммарная ширина всех закреплённых на активной поверхности призмы пьезоэлементов;
R - радиус кривизны активной поверхности призмы.
Для достижения указанного технического результат также возможен вариант выполнения пьезоэлемента в виде решётки, состоящей из нескольких активных элементов, при этом каждый активный элемент имеет как минимум один контакт для подключения к собственному генератору электрических импульсов и/или собственному приемнику, причём ось решётки активных элементов расположена параллельно плоскости падения ультразвуковой волны.
При этом ширина b каждого пьезоэлемента, либо ширина b каждого активного элемента, составляющего решетку (в случае выполнения пьезоэлемента в виде решётки), предпочтительно, для увеличения чувствительности преобразователя, которая, в первом приближении, пропорциональна площади пьезоэлемента/активного элемента, а также для технологического упрощения реализации высокочастотных преобразователей, должна удовлетворять условию:
b ≥ (1,5 ÷ 3) λ (5), где:
b – ширина каждого пьезоэлемента (активного элемента решетки);
λ – длина ультразвуковой волны в материале призмы.
Также технический результат достигается тем, что электронное управление углом ввода ультразвуковой волны в материал объекта контроля в режиме излучения и/или приёма осуществляют путем синфазного подключения, одного или группы из двух и более активных элементов, причем, геометрическое расположение центра подключаемого элемента или группы элементов на призме определяет направление главного лепестка диаграммы направленности преобразователя.
Также технический результат достигается тем, что электронное управление шириной диаграммы направленности осуществляют путём увеличения или уменьшения числа соседних, одновременно работающих активных элементов, причем увеличение числа подключаемых элементов приводит, как правило, к расширению диаграммы направленности преобразователя.
Также технический результат достигается тем, что при подключении двух и более активных элементов преобразователя осуществляют коррекцию параметров его диаграммы направленности путем управления задержками сигналов, подаваемых на эти активные элементы в режиме излучения, и/или сигналов, снимаемых с этих активных элементов в режиме приёма.
Заявляемая конструкция поясняется изображениями.
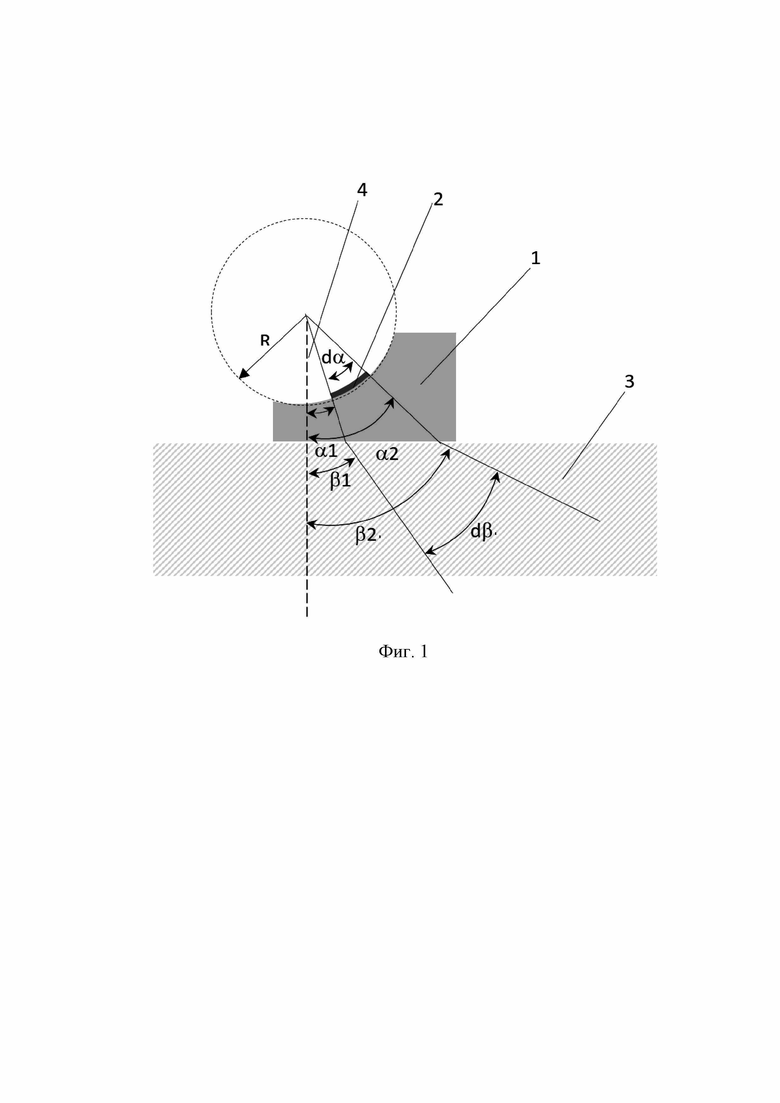
На Фиг. 1 показана конструкция ультразвукового преобразователя с вогнутой активной поверхностью.
Ультразвуковой преобразователь включает призму 1 с наклеенным на её активную поверхность пьезоэлементом 2 шириной b, выполненным в виде гибкой пьезоэлектрической пленки, для которого выполняется условие в соответствии с формулой (5): b ≥ (1,5 ÷ 3)λ.
Призма 1 размещена на объекте контроля 3, при этом ось цилиндрической активной поверхности расположена вне призмы, а её радиус кривизны равен R.
Пьезоэлемент 2 с угловыми границами α1 и α1 относительно нормали 4 к поверхности объекта контроля 3, определяет геометрическое раскрытие dα диаграммы направленности в конкретной призме с радиусом R её активной поверхности:
dα = α2 - α1 = b/R (6).
Таким образом, при проектировании конкретного ультразвукового преобразователя следует, исходя из необходимого рабочего диапазона углов dα, и принимая во внимание формулу (5), задаться размером b активного элемента 2, а затем рассчитать радиус R призмы 1 по формуле:
R = b/dα (7).
Как видно из Фиг. 1, главному максимуму диаграммы направленности в призме 1 геометрически будет соответствовать угол:
α0 = α1 + (α2 - α1)/2 (8).
Угол α0 должен быть так же учтен при проектировании преобразователя, поскольку он определяет позицию (место закрепления) пьезоэлемента 2 на активную поверхность призмы 1.
Знание параметров α0, dα, α2, α1, R, b, а также скорости продольной волны С1 в материале призмы 2 конкретного преобразователя позволяет определить основные параметры поля в конкретном объекте контроля 3:
dβ = β2 - β1 = Arcsin (C2 x Sin α2/C1) – Arcsin (C2 x Sin α1/C1) (9).
Как видно из Фиг.1, главному максимуму диаграммы направленности в объекте контроля 3 геометрически будет соответствовать угол:
β0 = β1 + (β2 - β1)/2 (10).
Если преобразователь проектируется для контроля конкретного материала со скоростью С2 волны интересующего типа, то это проектирование осуществляют в обратном порядке: сначала задают углы β0, β1, β2, выбирают материал призмы 1 со скоростью С1 продольной волны в нем, задают размер b пьезоэлемента 2, и, с помощью вышеприведенных формул, рассчитывают параметры α0, dα, α2, α1, и R.
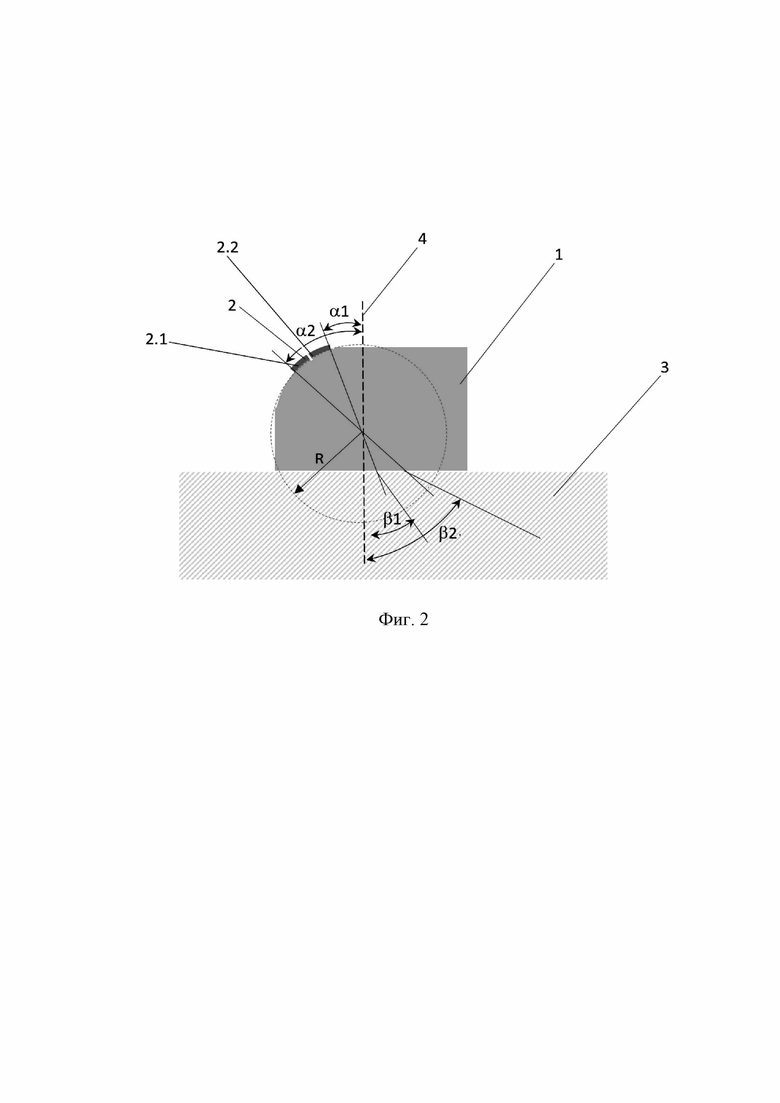
На Фиг. 2 показана конструкция ультразвукового преобразователя с выпуклой активной поверхностью, на которой применены те же обозначения, как и на Фиг. 1.
Ось кривизны активной поверхности расположена вблизи границы с объектом контроля 3, но всё же внутри призмы. Это необходимо для того, чтобы уже в приповерхностной зоне объекта контроля 3 получить расходящийся ультразвуковой пучок. Это не исключает, впрочем, возможности переноса оси кривизны активной поверхности в объект контроля, если этого потребует специфика задачи.
Кроме направления кривизны активной поверхности призмы 1, преобразователь на Фиг. 2 имеет еще одну важную особенность: его пьезоэлемент 2 электрически и акустически разделен на два активных элемента 2.1 и 2.2, причем размер b2.1 и b2.2 каждого из них удовлетворяет условию формулы (5), а именно:
b2.1 ≥ (1,5 ÷ 3) λ
b2.2 ≥ (1,5 ÷ 3) λ
Для гибкой пьезоэлектрической плёнки с очень низкой механической добротностью такое разделение достигается путем деления одного или обеих электродов на две равные гальванически независимые части.
Если организовать синфазную, одновременную работу обеих частей 2.1 и 2.2 пьезоэлемента 2, то, как и в случае на Фиг. 1, преобразователь будет обеспечивать диаграмму направленности, с геометрическими границами α1 и α2 в призме 1, и β1 и β2 в объекте контроля 3. При этом каждый активный элемент 2.1 и 2.2 в отдельности обеспечивает геометрическое деление диапазона dα = α2 - α1 на две части: dα(2.1) и dα(2.1), причем, dα = dα(2.1)+dα(2.2).
При этом, геометрические максимумы диаграммы направленности в призме 1 для каждого активного элемента 2.1 и 2.2, как видно из Фиг.2, будут находиться на углах:
α(2.1)0 = α1 + (α2 - α1)/4
α(2.2)0 = α1 + 3(α2 - α1)/4
Таким образом, такой ультразвуковой преобразователь, при соответствующем подключении активных элементов 2.1 и 2.2, позволяет реализовать три направления главного максимума диаграммы направленности:
α(2.1)0 = α1 + (α2 - α1)/4
α(2.2)0 = α1 + 3(α2 - α1)/4
α0 = α(2.1)0 + α(2.2)0 = α1 + (α2 - α1)/2
Соответственно, в объекте контроля 3 преобразователь также позволяет реализовать три направления главного максимума диаграммы направленности:
β (2.1)0 = β1 + (β2 - β1)/4
β (2.2)0 = β1 + 3(β2 - β1)/4
β0 = β (2.1)0 + β (2.2)0 = β1 + (β2 - β1)/2
Соответствующие углы всегда отсчитываются от нормали 4.
Еще одна возможность коррекции параметров диаграммы направленности преобразователя, в частности, параметра β0, заключается в управлении задержками сигналов от активных элементов 2.1 и 2.2 в режиме излучения и/или приема так, как это делается для фазированных решеток. Единственная особенность такого управления заключается в том, что с учетом формулы 3, эффективность коррекции параметра β0 будет падать по мере увеличения размеров b2.1 и b2.2: чем больше волновые размеры элементов, тем меньше величина изменения параметра β0 может быть реализована.
Пьезоэлемент 2 выполненный в виде гибкой пьезоэлектрической пленки может быть разделен на любое разумное количество активных элементов.
Как видно из Фиг. 2, при расположении оси кривизны активной поверхности очень близко к границе призмы 2 с поверхностью объекта контроля 3, положение точки выхода центрального луча диаграммы направленности практически не зависит от угла (и, соответственно, от того, какой из активных элементов или какая их комбинация в данный момент используется).
Это приводит к отсутствию необходимости учёта изменения положения точки выхода, а, следовательно, стрелы преобразователя, при расшифровке результатов ультразвукового контроля и определении координат обнаруженного дефекта.
Изобретение было реализовано при создании трех установок для ультразвукового контроля сварных швов деталей космических кораблей, изготавливаемых НПО Прогресс.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1997 |
|
RU2158920C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ СОЕДИНЕНИЙ ЛОПАТОК С ДИСКОМ | 2011 |
|
RU2478946C1 |
| Устройство для иммерсионного ультразвукового контроля | 2020 |
|
RU2723913C1 |
| Способ определения координаты отражателя в сечении, перпендикулярном сварному соединению по TOFD-эхосигналам | 2020 |
|
RU2740168C1 |
| ПОЛИХРОМАТИЧЕСКИЙ АКУСТООПТИЧЕСКИЙ ДЕФЛЕКТОР И УСТРОЙСТВО НА ЕГО ОСНОВЕ ДЛЯ УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ИЗЛУЧЕНИЯ, ДЛИНОЙ ВОЛНЫ И МОЩНОСТЬЮ (ВАРИАНТЫ) | 2003 |
|
RU2243582C2 |
| Способ амплитудно-фазовой пеленгации системой с вращающимися антаннами | 2020 |
|
RU2750335C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ УГЛОМЕРНОГО ПОВОРОТНОГО СТОЛА | 2021 |
|
RU2779239C1 |
| СПОСОБ ПЕЛЕНГАЦИИ С УЧЕТОМ КОРРЕЛЯЦИОННОЙ ВЗАИМОСВЯЗИ МЕЖДУ ЛУЧАМИ | 2005 |
|
RU2305294C2 |
| ШИРОКОПОЛОСНАЯ АНТЕННА С СЕКТОРНОЙ ДИАГРАММОЙ НАПРАВЛЕННОСТИ В Н-ПЛОСКОСТИ | 1993 |
|
RU2119215C1 |
| Машина для инженерно-геологических работ и способ управления ее манипулятором | 2022 |
|
RU2820441C2 |
Использование: для неразрушающего контроля различных изделий. Сущность изобретения заключается в том, что ультразвуковой преобразователь содержит призму с активной поверхностью, на которой закреплен, как минимум, один пьезоэлемент, при этом активная поверхность имеет цилиндрическую форму, причем ее ось расположена перпендикулярно плоскости падения ультразвуковой волны, а каждый закрепленный на ней пьезоэлемент выполнен в виде гибкой пьезоэлектрической пленки, причем угловые характеристики ультразвукового преобразователя в геометрическом приближении связаны между собой заданной системой уравнений. Технический результат: обеспечение возможности расширения диапазона рабочих углов, диаграммы направленности и диапазона рабочих частот преобразователя, а также упрощение применяемой дефектоскопической электроники при одновременном сохранении возможности электронного управления шириной диаграммы направленности и направлением ее главного максимума. 6 з.п. ф-лы, 2 ил.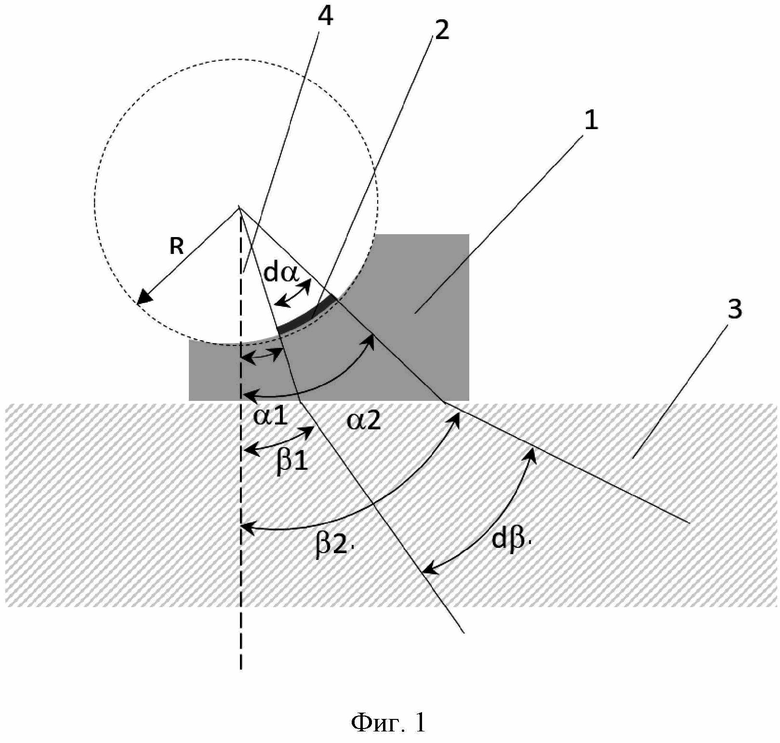
1. Ультразвуковой преобразователь, содержащий призму с активной поверхностью, на которой закреплён, как минимум, один пьезоэлемент, отличающийся тем, что активная поверхность имеет цилиндрическую форму, при этом её ось расположена перпендикулярно плоскости падения ультразвуковой волны, а каждый закреплённый на ней пьезоэлемент выполнен в виде гибкой пьезоэлектрической плёнки, причём угловые характеристики ультразвукового преобразователя в геометрическом приближении связаны между собой системой уравнений:
dα = α2 - α1 = B/R;
dβ = β2 - β1 = Arcsin (C2 x Sin α2/C1) – Arcsin (C2 x Sin α1/C1),
где:
dα, dβ – желаемые диапазоны углов возбуждения и/или приёма ультразвуковых волн в материалах призмы и объекта контроля соответственно;
α1, α2 – угловые границы диаграммы направленности в материале призмы;
β1 и β2 – желаемые угловые границы диаграммы направленности в материале объекта контроля,
С1 и С2 – скорости упругих волн соответственно в материале призмы и в материале объекта контроля;
В – суммарная ширина всех закреплённых на активной поверхности призмы пьезоэлементов;
R - радиус кривизны активной поверхности призмы.
2. Ультразвуковой преобразователь по п. 1, отличающийся тем, что ширина пьезоэлемента удовлетворяет условию:
b ≥ (1,5 ÷ 3) λ, где:
b – ширина пьезоэлемента;
λ - длина ультразвуковой волны в материале призмы.
3. Ультразвуковой преобразователь по п. 1, отличающийся тем, что пьезоэлемент представляет собой решётку, состоящую из нескольких активных элементов, при этом каждый активный элемент имеет как минимум один контакт для подключения к собственному генератору электрических импульсов и/или собственному приёмнику.
4. Ультразвуковой преобразователь по п. 3, отличающийся тем, что ширина каждого активного элемента удовлетворяет условию:
b ≥ (1,5 ÷ 3) λ, где:
b – ширина каждого активного элемента решётки;
λ - длина ультразвуковой волны в материале призмы.
5. Ультразвуковой преобразователь по п. 4, отличающийся тем, что электронное управление углом ввода ультразвуковой волны в материал объекта контроля в режиме излучения и/или приёма осуществляют путём синфазного подключения одного или группы из двух и более активных элементов, причём геометрическое расположение центра подключаемого элемента или группы элементов на призме определяет направление главного лепестка диаграммы направленности преобразователя.
6. Ультразвуковой преобразователь по п. 4, отличающийся тем, что электронное управление шириной диаграммы направленности осуществляют путём увеличения или уменьшения числа одновременно работающих активных элементов, причём увеличение числа подключаемых элементов приводит, как правило, к расширению диаграммы направленности преобразователя.
7. Ультразвуковой преобразователь по п. 4, отличающийся тем, что при подключении двух и более активных элементов преобразователя осуществляют коррекцию параметров его диаграммы направленности путём управления задержками сигналов, подаваемых на эти активные элементы в режиме излучения, и/или сигналов, снимаемых с этих активных элементов в режиме приёма.
| Прибор для измерения радиуса желоба кольца шарикового подшипника | 1960 |
|
SU145759A1 |
| Установка для испытания на изгиб различных изделий | 1959 |
|
SU136582A1 |
| Преобразователь для ультразвукового контроля | 1983 |
|
SU1163253A1 |
| УЛЬТРАЗВУКОВОЙ РАЗДЕЛЬНО-СОВМЕЩЕННЫЙ ШИРОКОЗАХВАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2013 |
|
RU2532587C1 |
| US 4391281 A, 05.07.1983 | |||
| US 6070466 B1, 06.06.2000. | |||

