ОБЛАСТЬ ТЕХНИКИ
[001] Данное изобретение относится к области инженерно-технического оборудования и, в частности, к машине для инженерно-геологических работ и способу управления ее манипулятором.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[002] Буровая каретка является одним из основных элементов оборудования для бурения и подрыва горных пород, обладает преимуществами гибкой адаптации и высокой эффективности и широко применяется для строительства железнодорожных и автодорожных туннелей буровзрывным способом. При строительстве буровзрывным способом необходимо определить местоположение взрывных скважин в забое туннеля, чтобы обеспечить максимальное воздействие взрывной волны. Согласно соответствующему уровню техники, известному автору изобретения, во время строительства инженерно-технических сооружений положение и угловую ориентацию механического манипулятора, как правило, регулируют вручную. Данный способ регулирования в большой степени зависит от опыта операторов, поэтому трудно обеспечить высокоточный контроль положения при бурении. Поскольку механический манипулятор имеет много степеней свободы, оператор должен многократно регулировать манипулятор при каждом его позиционировании перед бурением, что приводит к низкой производительности. Кроме того, из-за большого количества взрывных скважин на одном участке суммарная погрешность в определении их местоположения приведет к большому расхождению между результатом бурения и расчетным значением и в конечном итоге - к низкой эффективности взрывных работ, выполняемых в туннеле. Зачастую возникает необходимость внесения корректив на участке взрыва, в результате чего стоимость строительства значительно возрастает.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[003] Целью данного изобретения является создание машины для инженерно-геологических работ и способа управления манипулятором указанной машины с повышением тем самым точности выполнения строительных работ и эффективности эксплуатации машины.
[004] Согласно первому аспекту данного изобретения предложена машина для инженерно-геологических работ, содержащая:
[005] корпус транспортного средства,
[006] манипулятор, соединенный с корпусом транспортного средства и имеющий несколько степеней свободы перемещения относительно указанного корпуса,
[007] систему определения положения и ориентации корпуса транспортного средства, расположенную на указанном корпусе и выполненную с возможностью получения информации о положении и ориентации корпуса транспортного средства в реальном времени для отображения его положения и ориентации в реальном времени в рабочем пространстве машины для инженерно-геологических работ,
[008] систему определения положения и ориентации манипулятора, расположенную на манипуляторе и выполненную с возможностью получения информации о положении и ориентации манипулятора в реальном времени для отображения его положения и ориентации в реальном времени относительно корпуса транспортного средства, и
[009] систему регулирования положения и ориентации, содержащую устройство управления и приводное устройство, причем устройство управления соединено, путем передачи сигналов, с системой определения положения и ориентации корпуса транспортного средства, с системой определения положения и ориентации манипулятора и с приводным устройством, при этом устройство управления выполнено с возможностью отправки приводному устройству управляющего сигнала для регулирования положения и ориентации манипулятора в соответствии с информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, с информацией о положении и ориентации корпуса транспортного средства в реальном времени и с информацией о положении и ориентации манипулятора в реальном времени, при этом приводное устройство находится в передаточном соединении с манипулятором и выполнено в возможностью приведения манипулятора в движение в соответствии с указанным управляющим сигналом для достижения манипулятором заданных положения и ориентации.
[010] Согласно некоторым вариантам выполнения данного изобретения
[011] система определения положения и ориентации корпуса транспортного средства выполнена с возможностью получения по меньшей мере одного из следующих видов информации о положении и ориентации корпуса транспортного средства в реальном времени: первого фактического значения α1 угла рыскания корпуса транспортного средства относительно рабочего пространства, второго фактического значения β1 угла тангажа корпуса транспортного средства относительно рабочего пространства и третьего фактического значения γ1 угла крена корпуса транспортного средства относительно рабочего пространства; и/или
[012] манипулятор содержит первую секцию и движущую стрелу, причем первый конец первой секции манипулятора соединен с корпусом транспортного средства и имеет несколько степеней свободы перемещения относительно указанного корпуса, а движущая стрела соединена со вторым концом первой секции манипулятора и имеет несколько степеней свободы перемещения относительно первой секции; причем система определения положения и ориентации манипулятора содержит устройство для определения угла ориентации первой секции манипулятора и устройство для определения угла ориентации движущей стрелы; при этом устройство для определения угла ориентации первой секции манипулятора выполнено с возможностью получения по меньшей мере одного из следующих видов информации о положении и ориентации манипулятора в реальном времени: четвертого фактического значения α2 угла рыскания первой секции манипулятора относительно корпуса транспортного средства, пятого фактического значения β2 угла тангажа первой секции манипулятора относительно корпуса транспортного средства и шестого фактического значения γ2 угла крена первой секции манипулятора относительно корпуса транспортного средства, - а устройство для определения угла ориентации движущей стрелы выполнено с возможностью получения по меньшей мере одного из следующих видов информации о положении и ориентации манипулятора в реальном времени: седьмого фактического значения α3 угла рыскания движущей стрелы относительно первой секции манипулятора, восьмого фактического значения β3 угла тангажа движущей стрелы относительно первой секции манипулятора и девятого фактического значения γ3 угла крена движущей стрелы относительно первой секции манипулятора.
[013] Согласно некоторым вариантам выполнения данного изобретения система определения положения и ориентации корпуса транспортного средства дополнительно содержит:
[014] группу призм, содержащую набор призм, расположенных в разных местах корпуса транспортного средства, и предназначенную для определения первого фактического значения α1, второго фактического значения β1 и третьего фактического значения γ1; и/или
[015] двухосевой датчик угла поворота, предназначенный для определения второго фактического значения β1 и третьего фактического значения γ1.
[016] Согласно некоторым вариантам выполнения данного изобретения
[017] устройство для определения угла ориентации первой секции манипулятора содержит первый датчик угла поворота, второй датчик угла поворота и третий датчик угла поворота, при этом первый датчик предназначен для определения четвертого фактического значения α2, второй датчик предназначен для определения пятого фактического значения β2, а третий датчик предназначен для определения шестого фактического значения γ2; и/или
[018] устройство для определения угла ориентации движущей стрелы содержит четвертый датчик угла поворота, пятый датчик угла поворота и шестой датчик угла поворота, при этом четвертый датчик предназначен для определения седьмого фактического значения α3, пятый датчик предназначен для определения восьмого фактического значения β3, а шестой датчик предназначен для определения девятого фактического значения γ3.
[019] Согласно некоторым вариантам выполнения данного изобретения устройство управления выполнено с возможностью: получения десятого фактического значения Н угла тангажа движущей стрелы относительно рабочего пространства и одиннадцатого фактического значения V угла рыскания движущей стрелы относительно рабочего пространства в соответствии с по меньшей мере одним из первого фактического значения α1, второго фактического значения β1, третьего фактического значения γ1, четвертого фактического значения α2 пятого фактического значения β2, шестого фактического значения γ2, седьмого фактического значения α3, восьмого фактического значения β3 и девятого фактического значения γ3.
[020] Согласно некоторым вариантам выполнения данного изобретения указанная информация о заданных положении и ориентации содержит первое заданное значение Н0 угла тангажа движущей стрелы относительно рабочего пространства и второе заданное значение V0 угла рыскания движущей стрелы относительно рабочего пространства; при этом устройство управления выполнено с возможностью: получения первого отклонения ΔН угла тангажа в соответствии с десятым фактическим значением Н и первым заданным значением Н0, получения второго отклонения ΔV угла рыскания в соответствии с одиннадцатым фактическим значением V и вторым заданным значением V0, и отправки приводному устройству управляющего сигнала в соответствии с первым отклонением ΔН и вторым отклонением ΔV.
[021] Согласно некоторым вариантам выполнения данного изобретения
[022] первая секция манипулятора расположена телескопическим образом вдоль направления своей длины, при этом система определения положения и ориентации манипулятора содержит датчик смещения первой секции манипулятора, выполненный с возможностью регистрации смещения первого конца первой секции манипулятора в направлении длины относительно второго конца в направлении длины; и/или
[023] движущая стрела расположена телескопическим образом вдоль направления своей длины, при этом система определения положения и ориентации манипулятора содержит датчик смещения движущей стрелы, выполненный с возможностью регистрации смещения первого конца движущей стрелы в направлении длины относительно второго конца в направлении длины; и/или
[024] манипулятор дополнительно содержит бурильную штангу, с возможностью перемещения расположенную на движущей стреле вдоль направления длины стрелы, при этом система определения положения и ориентации манипулятора содержит датчик перемещения бурильной штанги, выполненный с возможностью регистрации смещения бурильной штанги относительно движущей стрелы вдоль направления длины стрелы.
[025] Согласно некоторым вариантам выполнения данного изобретения приводное устройство содержит первое приводное устройство, второе приводное устройство и третье приводное устройство, которые находятся в передаточном соединении с движущей стрелой, при этом первое приводное устройство предназначено для приведения движущей стрелы во вращательное движение вокруг первой оси относительно первой секции манипулятора, второе приводное устройство предназначено для приведения движущей стрелы во вращательное движение вокруг второй оси относительно первой секции манипулятора, третье приводное устройство предназначено для приведения движущей стрелы во вращательное движение вокруг третьей оси относительно движущей стрелы, причем первая ось проходит вдоль направления высоты движущей стрелы, вторая ось проходит вдоль направления ширины первой секции манипулятора, а третья ось проходит вдоль направления длины первой секции манипулятора.
[026] Согласно некоторым вариантам выполнения данного изобретения приводное устройство представляет собой гидравлическое приводное устройство, при этом система регулирования положения и ориентации содержит регулирующий клапан, соединенный с устройством управления путем передачи сигналов и соединенный с гидравлическим приводным устройством через гидравлический трубопровод, при этом регулирующий клапан предназначен для регулирования давления и/или расхода масла в гидравлическом приводном устройстве в соответствии с управляющим сигналом, отправленным устройством управления для приведения манипулятора в движение.
[027] Согласно некоторым вариантам выполнения данного изобретения машина для инженерно-геологических работ содержит буровую каретку, тележку с анкерной связью или тележку для мокрого распыления.
[028] Согласно второму аспекту данного изобретения предложен способ управления манипулятором машины для инженерно-геологических работ, включающий следующие этапы:
[029] получение информации о положении и ориентации корпуса транспортного средства в реальном времени для отображения положения и ориентации корпуса транспортного средства машины для инженерно-геологических работ в реальном времени в рабочем пространстве указанной машины и получение информации о положении и ориентации манипулятора в реальном времени для отображения положения и ориентации манипулятора машины для инженерно-геологических работ в реальном времени в рабочем пространстве указанной машины; и
[030] регулирование положения и ориентации манипулятора в соответствии с информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, с информацией о положении и ориентации корпуса транспортного средства в реальном времени и с информацией о положении и ориентации манипулятора в реальном времени для достижения манипулятором заданных положения и ориентации.
[031] Согласно некоторым вариантам выполнения данного изобретения
[032] этап получения информации о положении и ориентации корпуса транспортного средства в реальном времени включает: получение по меньшей мере одного из первого фактического значения α1 угла рыскания корпуса транспортного средства в рабочем пространстве, второго фактического значения β1 угла тангажа корпуса транспортного средства в рабочем пространстве и третьего фактического значения γ1 угла крена корпуса транспортного средства в рабочем пространстве; и/или
[033] манипулятор содержит первую секцию и движущую стрелу, причем первый конец первой секции манипулятора соединен с корпусом транспортного средства и имеет несколько степеней свободы перемещения относительно указанного корпуса, а движущая стрела соединена со вторым концом первой секции манипулятора и имеет несколько степеней свободы перемещения относительно первой секции; при этом этап получения информации о положении и ориентации манипулятора в реальном времени включает: получение по меньшей мере одного из четвертого фактического значения α2 угла рыскания первой секции манипулятора относительно корпуса транспортного средства, пятого фактического значения β2 угла тангажа первой секции манипулятора относительно корпуса транспортного средства, шестого фактического значения γ2 угла крена первой секции манипулятора относительно корпуса транспортного средства, седьмого фактического значения α3 угла рыскания движущей стрелы относительно первой секции манипулятора, восьмого фактического значения β3 угла тангажа движущей стрелы относительно первой секции манипулятора и девятого фактического значения γ3 угла крена движущей стрелы относительно первой секции манипулятора.
[034] Согласно некоторым вариантам выполнения данного изобретения получение информации о положении и ориентации корпуса транспортного средства в реальном времени включает следующие этапы:
[035] предоставление информации о координатах группы призм, причем указанная информация содержит координаты набора призм, расположенных в разных местах корпуса транспортного средства; и
[036] получение первого фактического значения α1, второго фактического значения β1 и третьего фактического значения γ1 в соответствии с координатами набора призм.
[037] Согласно некоторым вариантам выполнения данного изобретения
[038] этап предоставления информации о координатах группы призм включает: предоставление координаты (x1, y1, z1) первой призмы и координаты (х2, y2, z2) второй призмы; и
[039] получение первого фактического значения α1, второго фактического значения β1 и третьего фактического значения γ1 согласно следующим соответствующим зависимостям:
[040] 
[041] 
[042] 
[043] Согласно некоторым вариантам выполнения данного изобретения этап получения информации о положении и ориентации манипулятора в реальном времени включает: получение десятого фактического значения Н угла тангажа движущей стрелы относительно рабочего пространства и одиннадцатого фактического значения V угла рыскания движущей стрелы относительно рабочего пространства в соответствии с по меньшей мере одним из первого фактического значения α1, второго фактического значения β1, третьего фактического значения γ1, четвертого фактического значения α2 пятого фактического значения Р2, шестого фактического значения γ2, седьмого фактического значения α3, восьмого фактического значения β3 и девятого фактического значения γ3.
[044] Согласно некоторым вариантам выполнения данного изобретения
[045] десятое фактическое значение Н получают в соответствии с первым фактическим значением α1, третьим фактическим значением γ1, четвертым фактическим значением α2 седьмым фактическим значением α3, восьмым фактическим значением β3, девятым фактическим значением γ3 и согласно следующим соответствующим зависимостям:
[046]  ; и
; и
[047] одиннадцатое фактическое значение V получают в соответствии со вторым фактическим значением β1, пятым фактическим значением Р2, седьмым фактическим значением α3, восьмым фактическим значением β3, девятым фактическим значением γ3 и согласно следующим соответствующим зависимостям:
[048] 
[049] Согласно некоторым вариантам выполнения данного изобретения этап регулирования положения и ориентации манипулятора в соответствии с расхождением между информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, информацией о положении и ориентации корпуса транспортного средства в реальном времени, и информацией о положении и ориентации манипулятора в реальном времени для достижения манипулятором заданных положения и ориентации включает:
[050] предоставление информации о заданных положении и ориентации, включающее: предоставление первого заданного значения Н0 угла тангажа движущей стрелы относительно рабочего пространства и предоставление второго заданного значения V0 угла рыскания движущей стрелы относительно рабочего пространства;
[051] получение первого отклонения ΔН угла тангажа в соответствии с десятым фактическим значением Н и первым заданным значением Н0 и получение второго отклонения ΔV угла рыскания в соответствии с одиннадцатым фактическим значением V и вторым заданным значением V0; и
[052] приведение движущей стрелы во вращательное движение вокруг первой оси, второй оси и третьей оси в соответствии с первым отклонением ΔН и вторым отклонением ΔV для регулирования положения и ориентации стрелы до тех пор, пока первое отклонение ΔН и второе отклонение ΔV не станут меньше допустимого диапазона, при этом первая ось проходит вдоль направления высоты движущей стрелы, вторая ось проходит вдоль направления ширины первой секции манипулятора, а третья ось проходит вдоль направления длины первой секции манипулятора.
[053] В машине для инженерно-геологических работ и в способе управления ее манипулятором согласно варианту выполнения данного изобретения положение и ориентация манипулятора в реальном времени могут автоматически регулироваться на основании информации о положении и ориентации корпуса транспортного средства в реальном времени, полученной системой определения положения и ориентации корпуса транспортного средства, информации о положении и ориентации манипулятора в реальном времени, полученной системой определения положения и ориентации манипулятора, и информации о заданных положении и ориентации манипулятора, определяемой требованиями к строительному объекту, до тех пор пока не будут достигнуты заданные положение и ориентация, при этом последующее управление манипулятором может быть осуществлено без использования ручного режима работы, что является преимуществом с точки зрения повышения точности выполнения строительных работ и эффективности эксплуатации машины для инженерно-геологических работ.
[054] Другие признаки и преимущества данного изобретения станут очевидны из подробного описания типичных вариантов выполнения данного изобретения, приведенного со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[055] Прилагаемые чертежи, описанные в данном документе, приведены для лучшего понимания данного изобретения и составляют часть настоящей заявки. Схематическое изображение вариантов выполнения данного изобретения и их описание используются для пояснения данного изобретения и никаким образом не ограничивают данное изобретение. На прилагаемых чертежах:
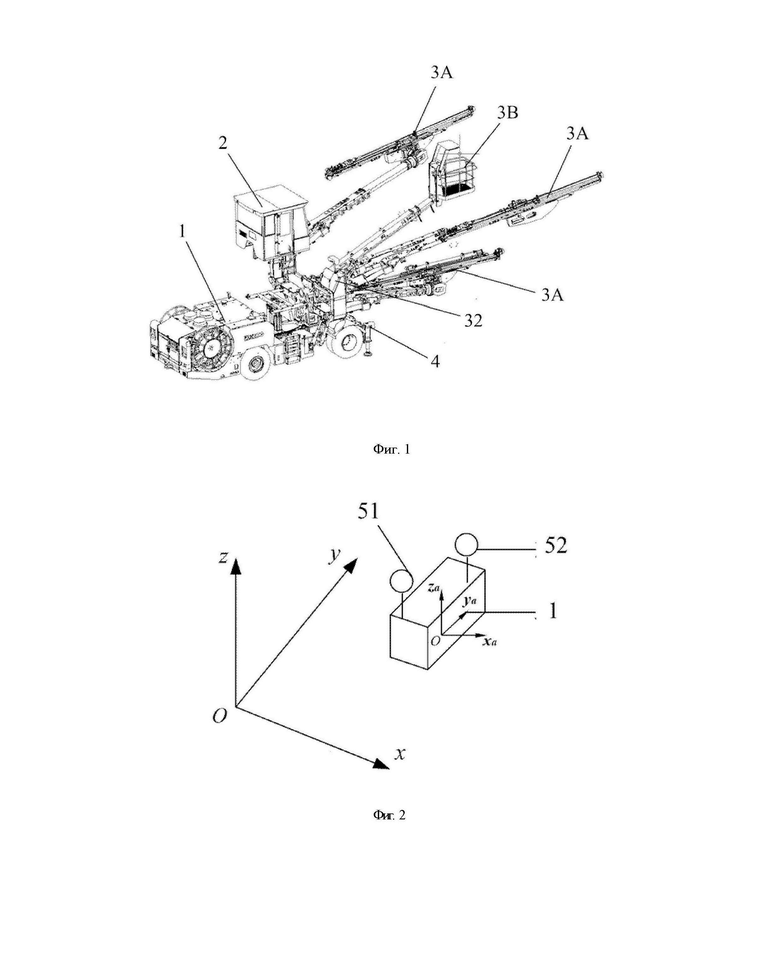
[056] фиг. 1 изображает структурную схему машины для инженерно-геологических работ согласно некоторым вариантам выполнения данного изобретения,
[057] фиг. 2 изображает структурную схему системы определения положения и ориентации корпуса транспортного средства согласно некоторым вариантам выполнения данного изобретения,
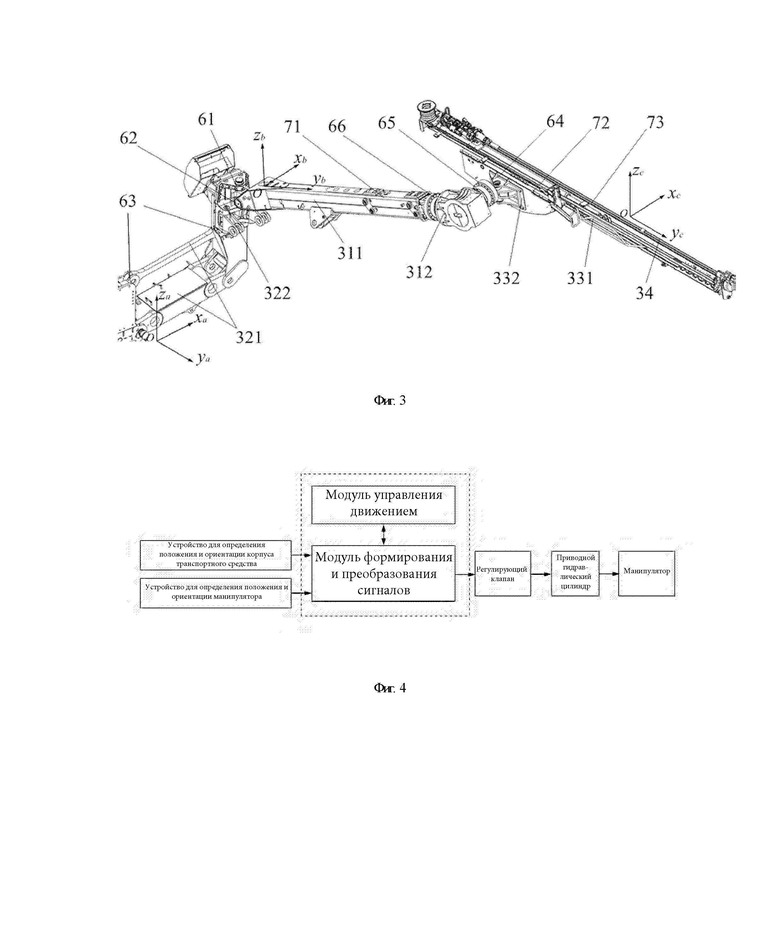
[058] фиг. 3 изображает структурную схему системы определения положения и ориентации манипулятора согласно некоторым вариантам выполнения данного изобретения,
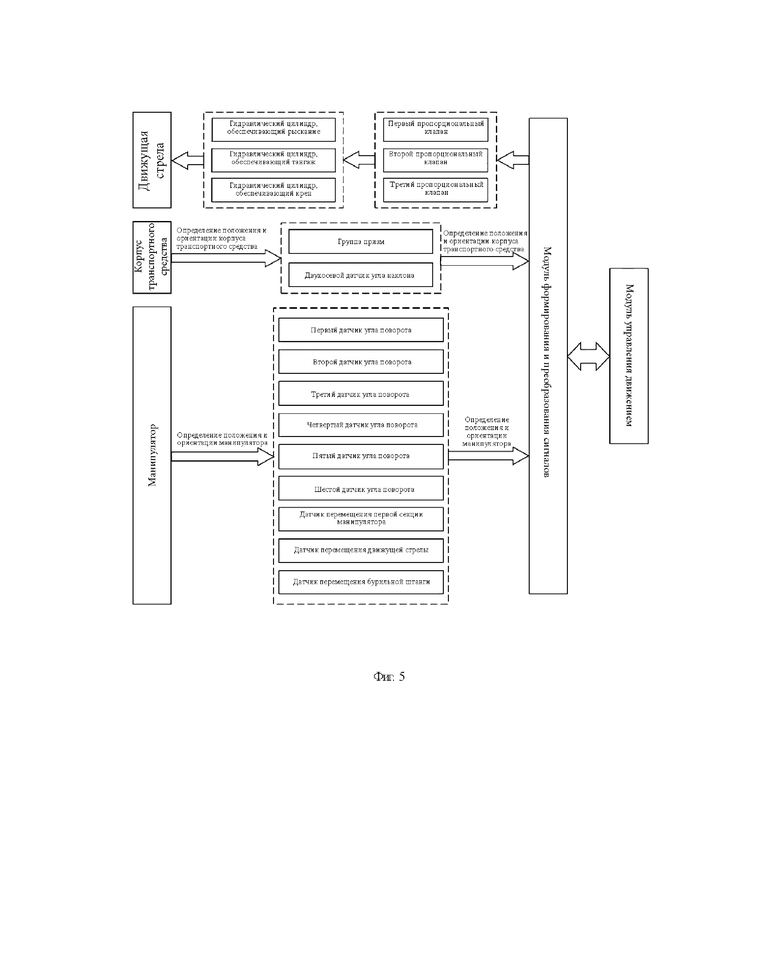
[059] фиг. 4 и 5 изображают схемы, иллюстрирующие принцип работы устройства управления манипулятором согласно некоторым вариантам выполнения данного изобретения, и
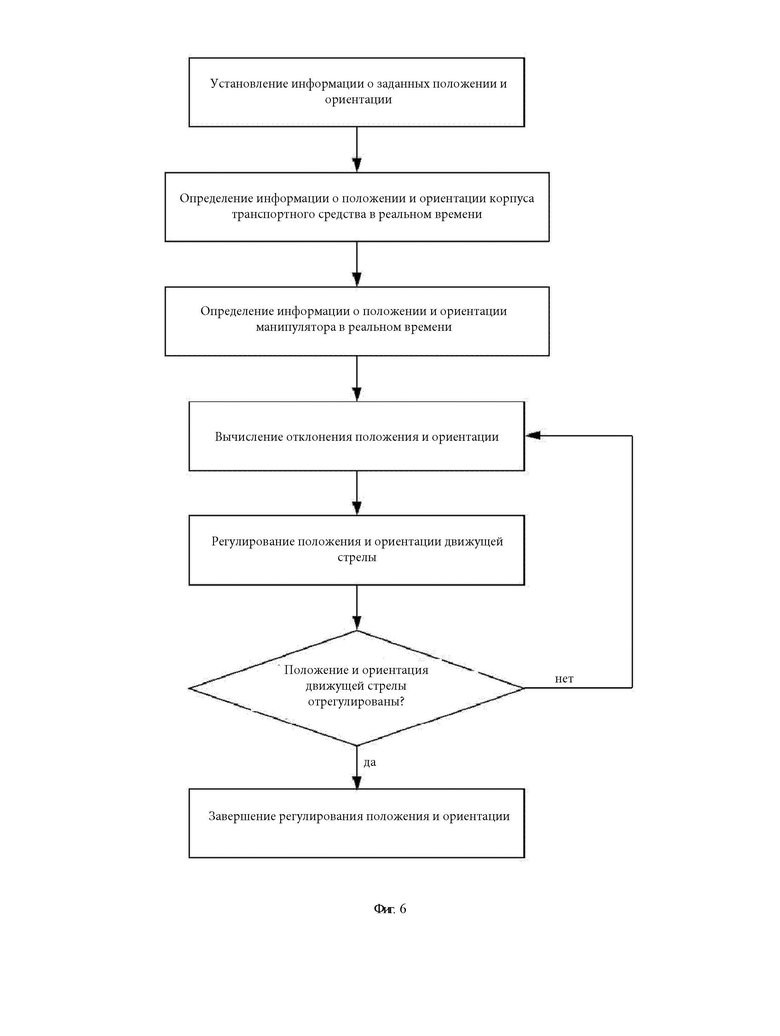
[060] фиг. 6 изображает блок-схему способа управления манипулятором согласно некоторым вариантам выполнения данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[061] Технические решения, используемые в вариантах выполнения данного изобретения, подробно описаны со ссылкой на прилагаемые чертежи при рассмотрении вариантов выполнения. Очевидно, что описанные варианты выполнения представляют лишь некоторые, а не все варианты выполнения данного изобретения. Фактически, нижеследующее описание по меньшей мере одного типичного варианта выполнения приведено исключительно в качестве иллюстрации и никаким образом не ограничивает данное изобретение и области его применения или использования. Все другие варианты выполнения, созданные специалистом в данной области техники на основании вариантов выполнения данного изобретения без приложения творческих усилий, следует считать находящимися в рамках правовой охраны данного изобретения.
[062] Если не указано иное, взаимное расположение, числовые выражения и количество элементов и этапов, описанных в вариантах выполнения, не ограничивают объем данного изобретения. При этом следует понимать, что для удобства описания размеры каждого элемента, изображенного на прилагаемых чертежах, не соответствуют фактическим размерным соотношениям. Подробное обсуждение технологий, способов и устройств, известных специалистам в соответствующей области техники, может быть опущено, но там, где это целесообразно, такие технологии, способы и устройства следует рассматривать как часть представленного документа. Во всех примерах, изображенных и рассмотренных в данном документе, любое конкретное значение следует интерпретировать исключительно как пример, а не ограничение. Следовательно, в других примерах типичных вариантов выполнения могут использоваться другие значения. Следует отметить, что на прилагаемых чертежах аналогичными номерами позиций и буквами обозначены аналогичные элементы. Таким образом, если конкретный элемент обозначен на одном чертеже, нет необходимости дополнительно описывать данный элемент для последующих чертежей.
[063] Следует понимать, что в описании данного изобретения слова «первый», «второй» и т.п., стоящие перед уточняющими частями предложения, используются исключительно для удобства отличия соответствующих частей. Если не указано иное, вышеуказанные слова не имеют специального значения и не могут рассматриваться как ограничение объема правовой охраны данного изобретения.
[064] Следует понимать, что в описании данного изобретения пространственная или азимутальная взаимосвязь, обозначенная такими словами, как «передний, задний, верхний, нижний, левый, правый», «поперечный, продольный, вертикальный, горизонтальный», «вершинный, донный» и т.п., в целом представляет собой азимутальную или пространственную взаимосвязь на основании прилагаемых чертежей, которая указана исключительно для облегчения и упрощения описания данного изобретения. Если не отмечено иное, данные слова, характеризующие азимутальную взаимосвязь, не указывают и не подразумевают, что устройство или компонент, о котором идет речь, должно/должен соответствовать определенному азимуту или обеспечивать конструкцию и эксплуатацию согласно определенному азимуту; следовательно, указанные слова не могут быть истолкованы как ограничение объема правовой охраны данного изобретения. Слова «внутренний, внешний», характеризующие азимутальную взаимосвязь, относятся к внутренней и внешней сторонам относительно габаритов каждого компонента.
[065] Как показано на фиг. 1-6, в вариантах выполнения данного изобретения предложены машина для инженерно-геологических работ и способ управления ее манипулятором.
[066] Машина для инженерно-геологических работ содержит корпус транспортного средства, манипулятор, систему определения положения и ориентации корпуса транспортного средства, систему определения положения и ориентации манипулятора и систему регулирования положения и ориентации, причем система определения положения и ориентации корпуса транспортного средства, система определения положения и ориентации манипулятора и система регулирования положения и ориентации образуют устройство управления манипулятором.
[067] Манипулятор соединен с корпусом транспортного средства и имеет несколько степеней свободы перемещения относительно указанного корпуса. Машина для инженерно-геологических работ может содержать один или более манипуляторов, имеющих одинаковые или разные функции.
[068] Система определения положения и ориентации корпуса транспортного средства расположена на указанном корпусе и выполнена с возможностью получения информации о положении и ориентации корпуса транспортного средства в реальном времени для отображения положения и ориентации корпуса транспортного средства в реальном времени в рабочем пространстве машины для инженерно-геологических работ.
[069] Система определения положения и ориентации манипулятора расположена на манипуляторе и выполнена с возможностью получения информации о положении и ориентации манипулятора в реальном времени для отображения его положения и ориентации в реальном времени относительно корпуса транспортного средства.
[070] Система регулирования положения и ориентации содержит устройство управления и приводное устройство. Устройство управления, соединено, путем передачи сигналов, с системой определения положения и ориентации корпуса транспортного средства, с системой определения положения и ориентации манипулятора и с приводным устройством, при этом устройство управления выполнено с возможностью отправки приводному устройству управляющего сигнала для регулирования положения и ориентации манипулятора в соответствии с информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, с информацией о положении и ориентации корпуса транспортного средства в реальном времени и с информацией о положении и ориентации манипулятора в реальном времени, при этом приводное устройство находится в передаточном соединении с манипулятором и выполнено в возможностью приведения манипулятора в движение в соответствии с указанным управляющим сигналом для достижения манипулятором заданных положения и ориентации.
[071] В данном изобретении машина для инженерно-геологических работ может представлять собой буровую каретку, тележку с анкерной связью или тележку для мокрого распыления. Например, в варианте выполнения, изображенном на фиг. 1, машина для инженерно-геологических работ представляет собой буровую каретку. Корпус транспортного средства содержит шасси 1, кабину 2, расположенную на передвижном шасси 1, набор манипуляторов и опорные стойки 4, соединенные с шасси 1. Каждый манипулятор содержит рабочее устройство для выполнения строительных работ. Набор манипуляторов содержит манипуляторы 3А для бурения горной породы и манипулятор 3В платформы, причем каждый манипулятор 3А для бурения горной породы содержит бурильное устройство, предназначенное для проведения буровых работ в рабочей поверхности строительного объекта, при этом заданные положение и ориентация могут быть достигнуты путем регулирования положения и ориентации каждого манипулятора и, соответственно, положение и ориентация бурильного устройства могут отвечать требованиям, предъявляемым к буровому строительному объекту. В некоторых вариантах выполнения, не изображенных на чертежах, манипулятор также может представлять собой манипулятор мокрого распыления, относящийся к тележке для мокрого распыления.
[072] В машине для инженерно-геологических работ согласно варианту выполнения данного изобретения система регулирования положения и ориентации может обеспечивать автоматическое регулирование положения и ориентации манипулятора в реальном времени на основании информации о положении и ориентации корпуса транспортного средства в реальном времени, полученной системой определения положения и ориентации корпуса транспортного средства, информации о положении и ориентации манипулятора в реальном времени, полученной системой определения положения и ориентации манипулятора, и информации о заданных положении и ориентации манипулятора, определенной в соответствии с требованиями к проведению строительных работ, до тех пор пока не будут достигнуты заданные положение и ориентация, при этом последующее управление манипулятором может быть осуществлено без использования ручного режима работы, что является преимуществом с точки зрения повышения точности выполнения строительных работ и эффективности эксплуатации машины для инженерно-геологических работ.
[073] Рабочим пространством считается пространство туннеля; при этом для в системе Охух координат рабочего пространства за ось х принято направление ширины туннеля, за ось у принято направление проходки туннеля, а за ось х принято направление высоты туннеля; в системе Oxayaza координат корпуса транспортного средства за ось ха принято направление ширины корпуса транспортного средства, за ось уа принято направление длины корпуса транспортного средства, а за ось ха принято направление высоты корпуса транспортного средства; в системе Oxbybxb координат первой секции манипулятора за ось xb принято направление ширины первой секции манипулятора, за ось yb принято направление длины первой секции манипулятора, а за ось xb принято направление высоты первой секции манипулятора; и в системе Охсусхс координат движущей стрелы за ось хс принято направление ширины движущей стрелы, за ось ус принято направление длины движущей стрелы, а за ось хс принято направление высоты движущей стрелы.
[074] Исходя из приведенных выше определений, в нижеследующем описании:
[075] «угол рыскания корпуса транспортного средства относительно рабочего пространства» означает угол, заключенный между проекцией оси уа системы Oxayaza координат корпуса транспортного средства в плоскости хОу системы Oxyz координат рабочего пространства и осью у указанной системы Oxyz;
[076] «угол тангажа корпуса транспортного средства относительно рабочего пространства» означает угол, заключенный между осью уа системы Oxayaza координат корпуса транспортного средства и плоскостью хОу системы Oxyz координат рабочего пространства;
[077] «угол крена корпуса транспортного средства относительно рабочего пространства» означает угол, заключенный между осью za системы Oxayaza координат корпуса транспортного средства и плоскостью, перпендикулярной плоскости хОу системы Oxyz координат рабочего пространства и включающей ось уа указанной системы Oxayaza координат;
[078] «угол рыскания первой секции 311 манипулятора относительно корпуса транспортного средства» означает угол, заключенный между проекцией оси уъ системы Oxbybzb координат первой секции манипулятора в плоскости ХаОуа системы OxayaZa координат корпуса транспортного средства и осью>>а указанной системы OxayaZa;
[079] «угол тангажа первой секции 311 манипулятора относительно корпуса транспортного средства» означает угол, заключенный между осью yb системы Oxbybzb координат первой секции манипулятора и плоскостью хаОуа системы Oxayaza координат корпуса транспортного средства;
[080] «угол крена первой секции 311 манипулятора относительно корпуса транспортного средства» означает угол, заключенный между осью zb системы Oxbybzb координат первой секции манипулятора и плоскостью, перпендикулярной плоскости хаОуа системы Oxayaza координат корпуса транспортного средства и включающей ось yb указанной системы Oxbybzb;
[081] «угол рыскания движущей стрелы 331 относительно первой секции 311 манипулятора» означает угол, заключенный между проекцией оси ус системы Oxcyczc координат движущей стрелы в плоскости xbOyb системы Oxbybzb координат первой секции манипулятора и осью yb указанной системы Oxbybzb.
[082] «угол тангажа движущей стрелы 331 относительно первой секции 311 манипулятора» означает угол, заключенный между осью ус системы Oxcyczc координат движущей стрелы и плоскостью xbOyb системы Oxbybzb координат первой секции манипулятора;
[083] «угол крена движущей стрелы 331 относительно первой секции 311 манипулятора» означает угол, заключенный между осью zc системы Oxcyczc координат движущей стрелы и плоскостью, перпендикулярной плоскости xbOyb системы Oxbybzb координат первой секции манипулятора и включающей ось yc указанной системы Oxcyczc;
[084] «угол тангажа движущей стрелы 331 относительно рабочего пространства» означает угол, заключенный между осью ус системы Oxcyczc координат движущей стрелы и плоскостью хОу системы Oxyz координат рабочего пространства; и
[085] «угол рыскания движущей стрелы 331 относительно рабочего пространства» означает угол, заключенный между проекцией оси ус системы Oxcyczc координат движущей стрелы в плоскости хОу системы Oxyz координат рабочего пространства и осью у указанной системы Oxyz.
[086] В некоторых вариантах выполнения система определения положения и ориентации корпуса транспортного средства выполнена с возможностью получения по меньшей мере одного из следующих видов информации о положении и ориентации корпуса транспортного средства в реальном времени: первого фактического значения α1 угла рыскания корпуса транспортного средства относительно рабочего пространства, второго фактического значения β1 угла тангажа корпуса транспортного средства относительно рабочего пространства и третьего фактического значения γ1 угла крена корпуса транспортного средства относительно рабочего пространства.
[087] В некоторых вариантах выполнения манипулятор содержит первую секцию 311 и движущую стрелу 331, при этом первый конец первой секции 311 манипулятора соединен с корпусом транспортного средства и имеет несколько степеней свободы перемещения относительно указанного корпуса, а движущая стрела 331 присоединена ко второму концу первой секции 311 манипулятора и имеет несколько степеней свободы перемещения относительно первой секции 311. Например, в варианте выполнения, изображенном на фиг. З, манипулятор содержит первую секцию 311, поворотное основание 312, вторую секцию 321, основание 322 первой секции манипулятора, движущую стрелу 331 и основание 332 движущей стрелы. Первая секция 311 и вторая секция 321 манипулятора с возможностью перемещения соединены посредством основания 322 первой секции манипулятора, а первая секция 311 манипулятора и движущая стрела с возможностью перемещения соединены посредством поворотного основания 312 и основания 332 движущей стрелы. Соответственно, первая секция 311 манипулятора имеет несколько степеней свободы вращения относительно шасси 1, а именно вращения вокруг оси, проходящей вдоль направления длины шасси 1, оси, проходящей вдоль направления ширины шасси 1, и оси, проходящей вдоль направления высоты шасси 1. Соответственно, движущая стрела 331 имеет несколько степеней свободы вращения относительно первой секции 311 манипулятора, а именно вращения вокруг оси, проходящей в направлении длины первой секции 311, оси, проходящей в направлении ширины первой секции 311, и оси, проходящей в направлении высоты первой секции 311.
[088] В вышеуказанных вариантах выполнения система определения положения и ориентации манипулятора содержит устройство для определения угла ориентации первой секции манипулятора и устройство для определения угла ориентации движущей стрелы. Устройство для определения угла ориентации первой секции манипулятора выполнено с возможностью получения по меньшей мере одного из следующих видов информации о положении и ориентации манипулятора в реальном времени: четвертого фактического значения α2 угла рыскания первой секции 311 манипулятора относительно корпуса транспортного средства, пятого фактического значения β2 угла тангажа первой секции 311 манипулятора относительно корпуса транспортного средства и шестого фактического значения γ2 угла крена первой секции 311 манипулятора относительно корпуса транспортного средства. Устройство для определения угла ориентации движущей стрелы выполнено с возможностью получения по меньшей мере одного из следующих видов информации о положении и ориентации манипулятора в реальном времени: седьмого фактического значения α3 угла рыскания движущей стрелы 331 относительно первой секции 311 манипулятора, восьмого фактического значения β3 угла тангажа движущей стрелы 331 относительно первой секции 311 манипулятора и девятого фактического значения γ3 угла крена движущей стрелы 331 относительно первой секции 311 манипулятора.
[089] В некоторых вариантах выполнения система определения положения и ориентации корпуса транспортного средства дополнительно содержит группу призм. Группа призм содержит набор призм, расположенных в разных местах корпуса транспортного средства, и предназначена для определения первого фактического значения α1, второго фактического значения β1 и третьего фактического значения γ1. Набор призм может представлять собой двойные призмы или тройные призмы. Например, в варианте выполнения, изображенном на фиг. 2, группа призм содержит первую призму 51 и вторую призму 52, которые расположены на расстоянии друг от друга вдоль одной из диагоналей шасси 1.
[090] В некоторых вариантах выполнения, не показанных на чертежах, система определения положения и ориентации корпуса транспортного средства дополнительно содержит двухосевой датчик угла наклона. Двухосевой датчик угла наклона предназначен для определения второго фактического значения β1 и третьего фактического значения γ1.
[091] В некоторых вариантах выполнения, как показано на фиг. 3, устройство для определения угла ориентации первой секции манипулятора содержит первый датчик 61 угла поворота, второй датчик 62 угла поворота и третий датчик 63 угла поворота. Первый датчик 61 предназначен для определения четвертого фактического значения α2 второй датчик 62 предназначен для определения пятого фактического значения β2, а третий датчик 63 предназначен для определения шестого фактического значения γ2.
[092] В некоторых вариантах выполнения, как показано на фиг. 3, устройство для определения угла ориентации движущейся стрелы содержит четвертый датчик 64 угла поворота, пятый датчик 65 угла поворота и шестой датчик 66 угла поворота. Четвертый датчик 64 предназначен для определения седьмого фактического значения α3, пятый датчик 65 предназначен для определения восьмого фактического значения β3, а шестой датчик 66 предназначен для определения девятого фактического значения γ3.
[093] Если рассматривать в качестве примера буровую каретку, перед использованием бурового манипулятора буровой каретки для бурения горной породы нужно определить положение и ориентацию движущей стрелы 331, необходимые для выполнения операции на рабочей поверхности строительного объекта, в соответствии с направлением оси скважины, то есть положение и ориентацию относительно рабочего пространства. Таким образом, фактическое значение угла тангажа движущей стрелы 331 относительно рабочего пространства и фактическое значение угла рыскания указанной стрелы относительно рабочего пространства могут быть получены с использованием значений углов, определенных датчиками угла поворота, входящими в систему определения положения и ориентации корпуса транспортного средства и в систему определения положения и ориентации манипулятора, после чего положение и ориентацию движущей стрелы 331 регулируют путем их согласования с заданным значением угла тангажа движущей стрелы относительно рабочего пространства и с заданным значением угла рыскания стрелы относительно рабочего пространства, так чтобы ось бурильной части, расположенной на движущей стреле 331, была совмещена с осью скважины, в результате чего обеспечено соответствие требованиям, предъявляемым к строительным работам.
[094] В некоторых вариантах выполнения устройство управления выполнено с возможностью: получения десятого фактического значения Н угла тангажа движущей стрелы 331 относительно рабочего пространства и одиннадцатого фактического значения V угла рыскания указанной стрелы относительно рабочего пространства в соответствии с по меньшей мере одним из первого фактического значения α1, второго фактического значения β1, третьего фактического значения γ1, четвертого фактического значения α2, пятого фактического значения β2, шестого фактического значения γ2, седьмого фактического значения α3, восьмого фактического значения β3 и девятого фактического значения γ3.
[095] В некоторых вариантах выполнения информация о заданных положении и ориентации содержит первое заданное значение Н0 угла тангажа движущей стрелы 331 относительно рабочего пространства и второе заданное значение V0 угла рыскания указанной стрелы относительно рабочего пространства, при этом устройство управления выполнено с возможностью: получения первого отклонения ΔН угла тангажа в соответствии с десятым фактическим значением Н и первым заданным значением Н0, получения второго отклонения ΔV угла рыскания в соответствии с одиннадцатым фактическим значением V и вторым заданным значением V0 и отправки приводному устройству управляющего сигнала в соответствии с первым отклонением ΔН и вторым отклонением ΔV.
[096] При бурении рабочей поверхности строительного объекта машина для инженерно-геологических работ, выполненная в соответствии с вышеописанными вариантами выполнения, может непосредственно отвечать требованиям, предъявляемым к строительным работам, вследствие регулирования положения и ориентации движущей стрелы 331 в соответствии с результатами, полученными системой определения положения и ориентации корпуса транспортного средства и системой определения положения и ориентации манипулятора без регулирования положения и ориентации других частей корпуса транспортного средства и манипулятора, что еще больше повышает эффективность эксплуатации.
[097] Основываясь на том, что в вышеописанных вариантах выполнения в качестве информации о положении и ориентации корпуса транспортного средства в реальном времени и информации о положении и ориентации манипулятора в реальном времени берется информация об угле поворота, для обеспечения еще большего соответствия требованиям к точности выполнения строительных работ и типу операции также можно получить информацию о смещении и другую информацию, используемую в качестве информации о положении и ориентации корпуса транспортного средства в реальном времени и информации о положении и ориентации манипулятора в реальном времени.
[098] В некоторых вариантах выполнения, как показано на фиг. 3, первая секция 311 манипулятора расположена телескопическим образом вдоль направления своей длины, при этом система определения положения и ориентации манипулятора содержит датчик 71 смещения первой секции манипулятора, выполненный с возможностью регистрации смещения первого конца первой секции 311 манипулятора в направлении длины относительно второго конца в направлении длины.
[099] В некоторых вариантах выполнения, как показано на фиг. 3, движущая стрела 331 расположена телескопическим образом вдоль направления своей длины, при этом система определения положения и ориентации манипулятора дополнительно содержит датчик 72 смещения движущей стрелы, выполненный с возможностью регистрации смещения первого конца движущей стрелы 331 в направлении длины относительно второго конца в направлении длины.
[0100] В некоторых вариантах выполнения, как показано на фиг. 3, манипулятор дополнительно содержит бурильную штангу 34, с возможностью перемещения расположенную на движущей стреле 331 вдоль направления длины стрелы 331, при этом система определения положения и ориентации манипулятора содержит датчик 73 смещения бурильной штанги, выполненный с возможностью регистрации смещения бурильной штанги 34 относительно движущей стрелы 331 вдоль направления длины стрелы 331.
[0101] В некоторых вариантах выполнения приводное устройство содержит первое приводное устройство, второе приводное устройство и третье приводное устройство, которые находятся в передаточном соединении с движущей стрелой 331. Первое приводное устройство предназначено приведения движущей стрелы 331 во вращательное движение вокруг первой оси относительно первой секции 311 манипулятора, второе приводное устройство предназначено для приведения движущей стрелы 331 во вращательное движение вокруг второй оси относительно первой секции 311 манипулятора, а третье приводное устройство предназначено для приведения движущей стрелы 331 во вращательное движение вокруг третьей оси относительно стрелы 331, причем первая ось проходит вдоль направления высоты движущей стрелы 331, вторая ось проходит вдоль направления ширины первой секции 311 манипулятора, а третья ось проходит вдоль направления длины первой секции 311 манипулятора. В вышеописанном варианте выполнения первое приводное устройство, второе приводное устройство и третье приводное устройство могут приводить стрелу 331 в движение по отдельности или совместно с регулированием тем самым ее положения.
[0102] В некоторых вариантах выполнения приводное устройство представляет собой гидравлическое приводное устройство, при этом система регулирования положения и ориентации содержит регулирующий клапан, соединенный с устройством управления путем передачи сигналов и соединенный с гидравлическим приводным устройством через гидравлический трубопровод, при этом регулирующий клапан предназначен для регулирования давления и/или расхода масла в гидравлическом приводном устройстве в соответствии с управляющим сигналом, отправленным устройством управления для приведения манипулятора в движение.
[0103] На фиг. 4 и 5 проиллюстрирован принцип работы устройства управления манипулятором согласно некоторым вариантам выполнения данного изобретения.
[0104] В вариантах выполнения, изображенных на фиг. 4 и 5, гидравлическое приводное устройство содержит гидравлический цилиндр, обеспечивающий рыскание и служащий в качестве первого приводного устройства, гидравлический цилиндр, обеспечивающий тангаж и служащий в качестве второго приводного устройства, и гидравлический цилиндр, обеспечивающий крен и служащий в качестве третьего приводного устройства. Соответственно, регулирующий клапан содержит первый регулирующий клапан, соединенный посредством гидравлического трубопровода с гидравлическим цилиндром, обеспечивающим рыскание, второй регулирующий клапан, соединенный посредством гидравлического трубопровода с гидравлическим цилиндром, обеспечивающим тангаж, и третий регулирующий клапан, соединенный посредством гидравлического трубопровода с гидравлическим цилиндром, обеспечивающим крен. Первый регулирующий клапан, второй регулирующий клапан и третий регулирующий клапан могут представлять собой пропорциональные клапаны.
[0105] В вариантах выполнения, изображенных на фиг. 4 и 5, устройство управления содержит модуль управления движением и модуль формирования и преобразования сигналов, при этом модуль управления движением соединен, путем передачи сигналов, с модулем формирования и преобразования сигналов, и в модуле управления движением может быть заранее сохранена информация о заданных положении и ориентации. Модуль формирования и преобразования сигналов преобразует информацию о положении и ориентации корпуса транспортного средства в реальном времени, полученную системой определения положения и ориентации корпуса транспортного средства, и информацию о положении и ориентации манипулятора в реальном времени, полученную системой определения положения и ориентации манипулятора, в сигналы, которые могут быть идентифицированы модулем управления движением, при этом модуль управления движением получает отклонение между фактическими положением и ориентацией и заданными положением и ориентацией движущей стрелы, и модуль формирования и преобразования сигналов преобразует указанное отклонение, полученное модулем управления движением, в пропорциональные сигналы, требуемые для управления первым регулирующим клапаном, вторым регулирующим клапаном и третьим регулирующим клапаном, так что движущая стрела приводится в движение с помощью гидравлического цилиндра, обеспечивающего рыскание, гидравлического цилиндра, обеспечивающего тангаж, и гидравлического цилиндра, обеспечивающего крен.
[0106] В некоторых вариантах выполнения вышеописанное устройство управления может быть реализовано в виде процессора общего назначения, программируемого логического контроллера (PLC), процессора цифровой обработки сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем логической матрицы (FPGA) или других программируемых логических устройств, дискретного логического элемента или транзисторного логического устройства, дискретного узла средств аппаратного обеспечения или любой соответствующей комбинации перечисленного для выполнения функций, описанных в данном изобретении.
[0107] В некоторых вариантах выполнения данного изобретения также предложен способ управления манипулятором машины для инженерно-геологических работ, включающий следующие этапы: получение информации о положении и ориентации корпуса транспортного средства в реальном времени для отображения положения и ориентации корпуса транспортного средства машины для инженерно-геологических работ в реальном времени в рабочем пространстве указанной машины, и получение информации о положении и ориентации манипулятора в реальном времени для отображения положения и ориентации манипулятора машины для инженерно-геологических работ в реальном времени в рабочем пространстве указанной машины; и регулирование положения и ориентации манипулятора в соответствии с информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, с информацией о положении и ориентации корпуса транспортного средства в реальном времени и с информацией о положении и ориентации манипулятора в реальном времени для достижения манипулятором заданных положения и ориентации.
[0108] Способ управления манипулятором, предложенный в варианте выполнения данного изобретения, может быть реализован с использованием машины для инженерно-геологических работ, выполненной согласно варианту выполнения данного изобретения.
[0109] Согласно способу управления манипулятором в соответствии с вариантом выполнения данного изобретения положение и ориентация манипулятора в реальном времени могут автоматически регулироваться на основании информации о положении и ориентации корпуса транспортного средства в реальном времени, полученной системой определения положения и ориентации корпуса транспортного средства, информации о положении и ориентации манипулятора в реальном времени, полученной системой определения положения и ориентации манипулятора, и информации о заданных положении и ориентации манипулятора, определенной в соответствии с требованиями к проведению строительных работ, до тех пор пока не будут достигнуты заданные положение и ориентация, при этом последующее управление манипулятором может быть осуществлено без использования ручного режима работы, что является преимуществом с точки зрения повышения точности выполнения строительных работ и эффективности эксплуатации машины для инженерно-геологических работ.
[0110] В некоторых вариантах выполнения этап получения информации о положении и ориентации корпуса транспортного средства в реальном времени включает получение по меньшей мере одного из первого фактического значения α1 угла рыскания корпуса транспортного средства в рабочем пространстве, второго фактического значения β1 угла тангажа корпуса транспортного средства в рабочем пространстве и третьего фактического значения γ1 угла крена корпуса транспортного средства в рабочем пространстве.
[0111] В некоторых вариантах выполнения манипулятор содержит первую секцию 311 и движущую стрелу 331, при этом первый конец первой секции 311 манипулятора соединен с корпусом транспортного средства и имеет несколько степеней свободы перемещения относительно указанного корпуса, а движущая стрела 331 присоединена ко второму концу первой секции 311 манипулятора и имеет несколько степеней свободы перемещения относительно первой секции 311. Этап получения информации о положении и ориентации манипулятора в реальном времени включает получение по меньшей мере одного из следующего: четвертого фактического значения α2 угла рыскания первой секции 311 относительно корпуса транспортного средства, пятого фактического значения β2 угла тангажа первой секции 311 относительно корпуса транспортного средства, шестого фактического значения γ2 угла крена первой секции 311 относительно корпуса транспортного средства, седьмого фактического значения α3 угла рыскания движущей стрелы 331 относительно первой секции 311 манипулятора, восьмого фактического значения β3 угла тангажа движущей стрелы 331 относительно первой секции 311 манипулятора и девятого фактического значения γ3 угла крена движущей стрелы 331 относительно первой секции 311 манипулятора.
[0112] В некоторых вариантах выполнения получение информации о положении и ориентации корпуса транспортного средства в реальном времени включает следующие этапы: предоставление информации о координатах группы призм, причем указанная информация содержит координаты набора призм, расположенных в разных местах корпуса транспортного средства, и получение первого фактического значения α1, второго фактического значения β1 и третьего фактического значения γ1 в соответствии с указанными координатами набора призм.
[0113] В некоторых вариантах выполнения, как проиллюстрировано на фиг. 2, этап предоставления информации о координатах группы призм включает: предоставление координат (x1, y1, z1) первой призмы и координат (х2, y2, z2) второй призмы и получение первого фактического значения α1, второго фактического значения значение β1 и третьего фактического значения γ1 согласно следующим соответствующим зависимостям:
[0114] 
[0115] 
[0116] 
[0117] В некоторых вариантах выполнения, этап получения информации о положении и ориентации манипулятора в реальном времени включает: получение десятого фактического значения Н угла тангажа движущей стрелы 331 относительно рабочего пространства и одиннадцатого фактического значения V угла рыскания указанной стрелы относительно рабочего пространства в соответствии с по меньшей мере одним из первого фактического значения α1, второго фактического значения β1, третьего фактического значения γ1, четвертого фактического значения α2 пятого фактического значения β2, шестого фактического значения γ2, седьмого фактического значения α3, восьмого фактического значения β3 и девятого фактического значения γ3.
[0118] В некоторых вариантах десятое фактическое значение Н получают в соответствии с первым фактическим значением α1, третьим фактическим значением γ1, четвертым фактическим значением α2 седьмым фактическим значением α3, восьмым фактическим значением β3, девятым фактическим значением γ3 и согласно следующим соответствующим зависимостям:
[0119]  и
и
[0120] одиннадцатое фактическое значение V получают в соответствии со вторым фактическим значением β1, пятым фактическим значением β2, седьмым фактическим значением α3, восьмым фактическим значением β3, девятым фактическим значением γ3 и согласно следующим соответствующим зависимостям:
[0121] 
[0122] Десятое фактическое значение Н получают путем прямой и линейной суперпозиции компонентов набора связей, причем α1 представляет собой компонент, обусловленный углом рыскания корпуса транспортного средства относительно рабочего пространства, γ1 представляет собой компонент, обусловленный углом крена корпуса транспортного средства относительно рабочего пространства, α2 представляет собой компонент, обусловленный углом рыскания первой секции манипулятора относительно корпуса транспортного средства, и α3 × cosγ3 + β3 × sinγ3 представляет собой компонент, обусловленный совместным действием углов рыскания, тангажа и крена движущей стрелы относительно первой секции манипулятора.
[0123] Одиннадцатое фактическое значение V получают путем прямой и линейной суперпозиции компонентов набора связей, причем β1 представляет собой компонент, обусловленный углом тангажа корпуса транспортного средства относительно рабочего пространства, β2 представляет собой компонент, обусловленный углом тангажа первой секции манипулятора относительно корпуса транспортного средства, и β3 × cosγ3 - α3 × sinγ3 представляет собой компонент, обусловленный совместным действием углов рыскания, тангажа и крена движущей стрелы относительно первой секции манипулятора.
[0124] В некоторых вариантах выполнения этап регулирования положения и ориентации манипулятора в соответствии с расхождением между информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, информацией о положении и ориентации корпуса транспортного средства в реальном времени, и информацией о положении и ориентации манипулятора в реальном времени для достижения манипулятором заданного положения и ориентации включает предоставление информации о заданных положении и ориентации, в ходе которого: предоставляют первое заданное значение Н0 угла тангажа движущей стрелы 331 относительно рабочего пространства и предоставляют второе заданное значение V0 угла рыскания движущей стрелы относительно рабочего пространства, получают первое отклонение ΔН в соответствии с десятым фактическим значением Н и первым заданным значением Н0 и получают второе отклонение ΔV угла рыскания в соответствии с одиннадцатым фактическим значением V и вторым заданным значением V0, приводят движущую стрелу 331 во вращательное движение вокруг первой оси, второй оси и третьей оси в соответствии с первым отклонением ΔН и вторым отклонением ΔV для регулирования положения и ориентация стрелы до тех пор, пока первое отклонение ΔН и второе отклонение ΔV не станут меньше допустимого диапазона, при этом первая ось проходит вдоль направления высоты движущей стрелы 331, вторая ось проходит вдоль направления ширины первой секции 311 манипулятора, а третья ось проходит вдоль направления длины первой секции 311 манипулятора.
[0125] Функция каждого этапа способа управления манипулятором может быть найдена в соответствующем описании устройства управления манипулятором машины для инженерно-геологических работ.
[0126] Способ управления манипулятором согласно некоторым вариантам выполнения данного изобретения описан ниже более подробно со ссылкой на фиг. 6. В варианте выполнения, изображенном на фиг. 6, манипулятор представляет собой буровой манипулятор буровой каретки и выполняет операцию бурения взрывной скважины в забое туннеля.
[0127] 1. Установление информации о заданных положении и ориентации. Определяют положение и ориентацию движущей стрелы 331, необходимые для выполнения операции на рабочей поверхности строительного объекта, в соответствии с направлением оси взрывной скважины, и устанавливают заданное положение и ориентацию, требуемые для выполнения операции бурения, в том числе первое заданное значение Н0 угла тангажа движущей стрелы 331 относительно рабочего пространства и второе заданное значение V0 угла рыскания движущей стрелы 331 относительно рабочего пространства.
[0128] 2. Получение информации о положении и ориентации корпуса транспортного средства в реальном времени. Получают первое фактическое значение α1, второе фактическое значение β1 и третье фактическое значение γ1 с использованием координаты (x1, t1, z1) первой призмы и координаты (х2, γ2, z2) второй призмы:
[0129] 
[0130] 
[0131] 
[0132] 3. Получение информации о положении и ориентации манипулятора в реальном времени. Определяют четвертое фактическое значение α2 с помощью первого датчика 61 угла поворота, определяют пятое фактическое значение β2 с помощью второго датчика 62 угла поворота, определяют шестое фактическое значение γ2 с помощью третьего датчика 63 угла поворота, определяют седьмое фактическое значение α3 с помощью четвертого датчика 64 угла поворота, определяют восьмое фактическое значение β3 с помощью пятого датчика 65 угла поворота, определяют девятое фактическое значение γ3 с помощью шестого датчика 66 угла поворота, получают десятое фактическое значение Н в соответствии с первым фактическим значением α1, третьим фактическим значением γ1, четвертым фактическим значением α2 седьмым фактическим значением α3, восьмым фактическим значением β3 и девятым фактическим значением γ3 и получают одиннадцатое фактическое значение V в соответствии со вторым фактическим значением β1, пятым фактическим значением β2, седьмым фактическим значением α3, восьмым фактическим значением β3 и девятым фактическим значением γ3, при этом:
[0133] 
[0134] 
[0135] 4. Вычисление отклонения между фактическими положением и ориентацией и заданными положением и ориентацией движущей стрелы. Получают первое отклонение АН=Н0-Н угла тангажа в соответствии с десятым фактическим значением Н и первым заданным значением Н0 и получают второе отклонение AV=V0-V угла рыскания в соответствии с одиннадцатым фактическим значением V относительно второго заданного значения V0.
[0136] 5. Регулирование положения и ориентации движущей стрелы. Определяют изменение Δα3 угла рыскания движущей стрелы 331, изменение Δβ3 угла тангажа и изменение Δγ3 угла крена в соответствии с первым отклонением ΔН и вторым отклонением ΔV. После определения Δα3, Δβ3 и Δγ3 одно из Δα3, Δβ3 и Δγ3 может быть принято в качестве фиксированного значения, например Δα3=0. Движущую стрелу 331 приводят во вращательное движение вокруг первой оси с учетом Δα3, вокруг второй оси с учетом Δβ3 и вокруг третьей оси с учетом Δγ3 для регулирования положения и ориентации стрелы 311 до тех пор, пока первое отклонение ΔН и второе отклонение ΔV не станут меньше допустимого диапазона. В результате ось бурильной штанги 34 совмещена с осью взрывной скважины.
[0137] Благодаря способу управления манипулятором в соответствии с вышеуказанными вариантами выполнения может быть обеспечено последующее управление буровым манипулятором буровой каретки, что является преимуществом с точки зрения повышения точности и эффективности бурения при проведении буровых работ.
[0138] В заключение следует отметить, что вышеописанные варианты выполнения приведены исключительно для описания технического решения данного изобретения и не ограничивают его. Хотя данное изобретение подробно описано со ссылкой на предпочтительные варианты выполнения, специалистам в данной области техники должно быть понятно, что возможно выполнение модификаций конкретных вариантов выполнения изобретения или эквивалентная замена части технических признаков без отклонения от объема технических решений, предложенных в данном изобретении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для инженерно-геологических работ и способ компенсации отклонения манипулятора указанной машины | 2022 |
|
RU2800704C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2014 |
|
RU2548366C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2723976C1 |
| КРАН С КРАНОВЫМ КОНТРОЛЛЕРОМ | 2020 |
|
RU2772140C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩИХ ПОПРАВОК В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2017 |
|
RU2654964C1 |
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| СПОСОБ АВТОНОМНОГО ИЗМЕРЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ | 2005 |
|
RU2282826C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И УГЛОВОЙ ОРИЕНТАЦИИ ТЕЛЕЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2303240C1 |
| СПОСОБ УМЕНЬШЕНИЯ ЛОБОВОГО СОПРОТИВЛЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2173658C1 |
Группа изобретений включает машину для инженерно-геологических работ и способ управления ее манипулятором. Машина содержит: корпус транспортного средства; манипулятор, имеющий несколько степеней свободы перемещения относительно корпуса; систему определения положения и ориентации корпуса транспортного средства, выполненную с возможностью получения информации о положении и ориентации корпуса транспортного средства в реальном времени для отображения положения и ориентации корпуса транспортного средства в реальном времени в рабочем пространстве машины для инженерно-геологических работ; систему определения положения и ориентации манипулятора, выполненную с возможностью получения информации о положении и ориентации манипулятора в реальном времени для отображения положения и ориентации манипулятора в реальном времени относительно корпуса транспортного средства, и систему регулирования положения и ориентации, содержащую устройство управления и приводное устройство, причем устройство управления выполнено с возможностью отправки приводному устройству управляющего сигнала для регулирования положения и ориентации манипулятора в соответствии с информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, с информацией о положении и ориентации корпуса транспортного средства в реальном времени и с информацией о положении и ориентации манипулятора в реальном времени, при этом приводное устройство выполнено в возможностью приведения манипулятора в движение в соответствии с управляющим сигналом для достижения манипулятором заданных положения и ориентации. Техническим результатом является повышение точности выполнения инженерно-геологических работ. 2 н. и 9 з.п. ф-лы, 6 ил.
1. Машина для инженерно-геологических работ, содержащая:
корпус транспортного средства,
манипулятор, соединенный с корпусом транспортного средства и имеющий несколько степеней свободы перемещения относительно указанного корпуса,
систему определения положения и ориентации корпуса транспортного средства, расположенную на указанном корпусе и выполненную с возможностью получения информации о положении и ориентации корпуса транспортного средства в реальном времени для отображения его положения и ориентации в реальном времени в рабочем пространстве машины для инженерно-геологических работ, причем система определения положения и ориентации корпуса транспортного средства выполнена с возможностью получения по меньшей мере одного из следующих видов информации о положении и ориентации корпуса транспортного средства в реальном времени: первого фактического значения α1 угла рыскания корпуса транспортного средства относительно рабочего пространства, второго фактического значения β1 угла тангажа корпуса транспортного средства относительно рабочего пространства и третьего фактического значения γ1 угла крена корпуса транспортного средства относительно рабочего пространства,
систему определения положения и ориентации манипулятора, расположенную на манипуляторе и выполненную с возможностью получения информации о положении и ориентации манипулятора в реальном времени для отображения его положения и ориентации в реальном времени относительно корпуса транспортного средства, при этом манипулятор содержит первую секцию (311) и движущую стрелу (331), причем первый конец первой секции (311) манипулятора соединен с корпусом транспортного средства и имеет несколько степеней свободы перемещения относительно указанного корпуса, а движущая стрела (331) соединена со вторым концом первой секции (311) манипулятора и имеет несколько степеней свободы перемещения относительно первой секции (311), причем система определения положения и ориентации манипулятора содержит устройство для определения угла ориентации первой секции манипулятора и устройство для определения угла ориентации движущей стрелы, при этом устройство для определения угла ориентации первой секции манипулятора выполнено с возможностью получения по меньшей мере одного из следующих видов информации о положении и ориентации манипулятора в реальном времени: четвертого фактического значения α2 угла рыскания первой секции (311) манипулятора относительно корпуса транспортного средства, пятого фактического значения β2 угла тангажа первой секции (311) манипулятора относительно корпуса транспортного средства и шестого фактического значения γ2 угла крена первой секции (311) манипулятора относительно корпуса транспортного средства, а устройство для определения угла ориентации движущей стрелы выполнено с возможностью получения по меньшей мере одного из следующих видов информации о положении и ориентации манипулятора в реальном времени: седьмого фактического значения α3 угла рыскания движущей стрелы (331) относительно первой секции (311) манипулятора, восьмого фактического значения β3 угла тангажа движущей стрелы (331) относительно первой секции (311) манипулятора и девятого фактического значения γ3 угла крена движущей стрелы (331) относительно первой секции (311) манипулятора, и
систему регулирования положения и ориентации, содержащую устройство управления и приводное устройство, причем устройство управления соединено путем передачи сигналов с системой определения положения и ориентации корпуса транспортного средства, с системой определения положения и ориентации манипулятора и с приводным устройством, при этом устройство управления выполнено с возможностью отправки приводному устройству управляющего сигнала для регулирования положения и ориентации манипулятора в соответствии с информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, с информацией о положении и ориентации корпуса транспортного средства в реальном времени и с информацией о положении и ориентации манипулятора в реальном времени, при этом приводное устройство находится в передаточном соединении с манипулятором и выполнено в возможностью приведения манипулятора в движение в соответствии с указанным управляющим сигналом для достижения манипулятором заданных положения и ориентации,
при этом устройство управления выполнено с возможностью получения десятого фактического значения Н угла тангажа движущей стрелы (331) относительно рабочего пространства и одиннадцатого фактического значения V угла рыскания движущей стрелы (331) относительно рабочего пространства в соответствии с по меньшей мере одним из первого фактического значения α1, второго фактического значения β1, третьего фактического значения γ1, четвертого фактического значения α2, пятого фактического значения β2, шестого фактического значения γ2, седьмого фактического значения α3, восьмого фактического значения β3 и девятого фактического значения γ3, и
информация о заданных положении и ориентации содержит первое заданное значение Н0 угла тангажа движущей стрелы (331) относительно рабочего пространства и второе заданное значение V0 угла рыскания движущей стрелы (331) относительно рабочего пространства, при этом устройство управления выполнено с возможностью получения первого отклонения ΔН угла тангажа в соответствии с десятым фактическим значением Н и первым заданным значением Н0, получения второго отклонения ΔV угла рыскания в соответствии с одиннадцатым фактическим значением V и вторым заданным значением V0 и отправки приводному устройству управляющего сигнала в соответствии с первым отклонением ΔН и вторым отклонением ΔV.
2. Машина по п. 1, в которой система определения положения и ориентации корпуса транспортного средства содержит:
группу призм, содержащую набор призм, расположенных в разных местах корпуса транспортного средства, и предназначенную для определения первого фактического значения α1, второго фактического значения β1 и третьего фактического значения γ1, и/или
двухосевой датчик угла поворота, предназначенный для определения второго фактического значения β1 и третьего фактического значения γ1.
3. Машина по п. 1, в которой
устройство для определения угла ориентации первой секции манипулятора содержит первый датчик (61) угла поворота, второй датчик (62) угла поворота и третий датчик (63) угла поворота, при этом первый датчик (61) предназначен для определения четвертого фактического значения α2, второй датчик (62) предназначен для определения пятого фактического значения β2, а третий датчик (63) предназначен для определения шестого фактического значения γ2, и/или
устройство для определения угла ориентации движущей стрелы содержит четвертый датчик (64) угла поворота, пятый датчик (65) угла поворота и шестой датчик (66) угла поворота, при этом четвертый датчик (64) предназначен для определения седьмого фактического значения α3, пятый датчик (65) предназначен для определения восьмого фактического значения β3, а шестой датчик (66) предназначен для определения девятого фактического значения γ3.
4. Машина по п. 1, в которой
первая секция (311) манипулятора расположена телескопическим образом вдоль направления своей длины, при этом система определения положения и ориентации манипулятора содержит датчик (71) смещения первой секции манипулятора, выполненный с возможностью регистрации смещения первого конца первой секции (311) манипулятора в направлении длины относительно второго конца в направлении длины, и/или
движущая стрела (331) расположена телескопическим образом вдоль направления своей длины, при этом система определения положения и ориентации манипулятора содержит датчик (72) смещения движущей стрелы, выполненный с возможностью регистрации смещения первого конца движущей стрелы (331) в направлении длины относительно второго конца в направлении длины, и/или
манипулятор содержит бурильную штангу (34), с возможностью перемещения расположенную на движущей стреле (331) вдоль направления длины стрелы (331), при этом система определения положения и ориентации манипулятора содержит датчик (73) смещения бурильной штанги, выполненный с возможностью регистрации смещения бурильной штанги (34) относительно движущей стрелы (331) вдоль направления длины стрелы (331).
5. Машина по п. 1, в которой приводное устройство содержит первое приводное устройство, второе приводное устройство и третье приводное устройство, находящиеся в передаточном соединении с движущей стрелой (331), при этом первое приводное устройство предназначено для приведения движущей стрелы (331) во вращательное движение вокруг первой оси относительно первой секции (311) манипулятора, второе приводное устройство предназначено для приведения движущей стрелы (331) во вращательное движение вокруг второй оси относительно первой секции (311) манипулятора, третье приводное устройство предназначено для приведения движущей стрелы (331) во вращательное движение вокруг третьей оси относительно указанной стрелы, причем первая ось проходит вдоль направления высоты движущей стрелы (331), вторая ось проходит вдоль направления ширины первой секции (311) манипулятора, а третья ось проходит вдоль направления длины первой секции (311) манипулятора.
6. Машина по любому из пп. 1-5, в которой приводное устройство представляет собой гидравлическое приводное устройство, при этом система регулирования положения и ориентации содержит регулирующий клапан, соединенный с устройством управления путем передачи сигналов и соединенный с гидравлическим приводным устройством через гидравлический трубопровод, при этом регулирующий клапан предназначен для регулирования давления и/или расхода масла в гидравлическом приводном устройстве в соответствии с управляющим сигналом, отправленным устройством управления для приведения манипулятора в движение.
7. Машина по любому из пп. 1-5, содержащая буровую каретку, тележку с анкерной связью или тележку для мокрого распыления.
8. Способ управления манипулятором машины для инженерно-геологических работ, включающий следующие этапы:
получение информации о положении и ориентации корпуса транспортного средства в реальном времени для отображения положения и ориентации корпуса транспортного средства машины для инженерно-геологических работ в реальном времени в рабочем пространстве указанной машины и получение информации о положении и ориентации манипулятора в реальном времени для отображения положения и ориентации манипулятора машины для инженерно-геологических работ в реальном времени в рабочем пространстве указанной машины, и
регулирование положения и ориентации манипулятора в соответствии с информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, с информацией о положении и ориентации корпуса транспортного средства в реальном времени и с информацией о положении и ориентации манипулятора в реальном времени для достижения манипулятором заданных положения и ориентации,
причем на этапе получения информации о положении и ориентации корпуса транспортного средства в реальном времени получают по меньшей мере одно из следующего: первое фактическое значение α1 угла рыскания корпуса транспортного средства в рабочем пространстве, второе фактическое значение β1 угла тангажа корпуса транспортного средства в рабочем пространстве и третье фактическое значение γ1 угла крена корпуса транспортного средства в рабочем пространстве, и/или
манипулятор содержит первую секцию (311) и движущую стрелу (331), причем первый конец первой секции (311) манипулятора соединен с корпусом транспортного средства и имеет несколько степеней свободы перемещения относительно указанного корпуса, а движущая стрела (331) соединена со вторым концом первой секции (311) манипулятора и имеет несколько степеней свободы перемещения относительно первой секции (311), при этом на этапе получения информации о положении и ориентации манипулятора в реальном времени получают по меньшей мере одного из следующего: четвертое фактическое значение α2 угла рыскания первой секции (311) манипулятора относительно корпуса транспортного средства, пятое фактическое значение β2 угла тангажа первой секции (311) манипулятора относительно корпуса транспортного средства, шестое фактическое значение γ2 угла крена первой секции (311) манипулятора относительно корпуса транспортного средства, седьмое фактическое значение α3 угла рыскания движущей стрелы (331) относительно первой секции (311) манипулятора, восьмое фактическое значение β3 угла тангажа движущей стрелы (331) относительно первой секции (311) манипулятора и девятое фактическое значение γ3 угла крена движущей стрелы (331) относительно первой секции (311) манипулятора,
при этом на этапе получения информации о положении и ориентации манипулятора в реальном времени получают десятое фактическое значение Н угла тангажа движущей стрелы (331) относительно рабочего пространства и одиннадцатое фактическое значение V угла рыскания движущей стрелы (331) относительно рабочего пространства в соответствии с по меньшей мере одним из первого фактического значения α1, второго фактического значения β1, третьего фактического значения γ1, четвертого фактического значения α2, пятого фактического значения β2, шестого фактического значения γ2, седьмого фактического значения α3, восьмого фактического значения β3 и девятого фактического значения γ3,
на этапе регулирования положения и ориентации манипулятора в соответствии с расхождением между информацией о заданных положении и ориентации, отображающей положение и ориентацию манипулятора, необходимые для выполнения операции на рабочей поверхности строительного объекта, информацией о положении и ориентации корпуса транспортного средства в реальном времени, и информацией о положении и ориентации манипулятора в реальном времени для достижения манипулятором заданных положения и ориентации выполняют:
предоставление информации о заданных положении и ориентации, включающее предоставление первого заданного значения Н0 угла тангажа движущей стрелы (331) относительно рабочего пространства и предоставление второго заданного значения V0 угла рыскания движущей стрелы (331) относительно рабочего пространства,
получение первого отклонения ΔН угла тангажа в соответствии с десятым фактическим значением Н и первым заданным значением Н0 и получение второго отклонения ΔV угла рыскания в соответствии с одиннадцатым фактическим значением V и вторым заданным значением V0, и
приведение движущей стрелы (331) во вращательное движение вокруг первой оси, второй оси и третьей оси в соответствии с первым отклонением ΔН и вторым отклонением ΔV для регулирования положения и ориентации стрелы (331) до тех пор, пока первое отклонение ΔН и второе отклонение ΔV не станут меньше допустимого диапазона, при этом первая ось проходит вдоль направления высоты движущей стрелы (331), вторая ось проходит вдоль направления ширины первой секции (311) манипулятора, а третья ось проходит вдоль направления длины первой секции (311) манипулятора.
9. Способ по п. 8, в котором при получении информации о положении и ориентации корпуса транспортного средства в реальном времени выполняют следующие этапы:
предоставление информации о координатах группы призм, причем указанная информация содержит координаты набора призм, расположенных в разных местах корпуса транспортного средства, и
получение первого фактического значения α1, второго фактического значения β1 и третьего фактического значения γ1 в соответствии с координатами набора призм.
10. Способ по п. 9, в котором
на этапе предоставления информации о координатах группы призм выполняют:
предоставление координаты (x1, y1, z1) первой призмы и координаты (х2, y2, z2) второй призмы, и
получение первого фактического значения α1, второго фактического значения β1 и третьего фактического значения γ1 согласно следующим соответствующим зависимостям:
α1=arctan((y2-y1)/(x2-x1))
β1=arctan((z2-z1)/(x2-x1))
γ1=arctan((z2-z1)/(y2-γ1)).
11. Способ по п. 8, в котором
десятое фактическое значение Н получают в соответствии с первым фактическим значением α1, третьим фактическим значением γ1, четвертым фактическим значением α2, седьмым фактическим значением α3, восьмым фактическим значением β3, девятым фактическим значением γ3 и согласно следующим соответствующим зависимостям:
Н=- (α1 + γ1 + α2 + α3 × соsγ3 + β3 × sinγ3), и
одиннадцатое фактическое значение V получают в соответствии со вторым фактическим значением β1, пятым фактическим значением β2, седьмым фактическим значением α3, восьмым фактическим значением β3, девятым фактическим значением γ3 и согласно следующим соответствующим зависимостям:
V=- (β1 + β2 + β3 × cosγ3 - α3 × sinγ3).
| CN 108301766 A, 20.07.2018 | |||
| CN 112282781 A, 29.01.2021 | |||
| CN 113639688 A, 12.11.2021 | |||
| СТАНОК ДЛЯ БУРЕНИЯ АНКЕРНЫХ СКВАЖИН | 2005 |
|
RU2298628C2 |
| ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА С СИСТЕМОЙ ПРЕОБРАЗОВАТЕЛЯ С ВОЗМОЖНОСТЬЮ ПЕРЕГРУЗКИ | 2018 |
|
RU2725184C1 |
| US 2019161944 A1, 30.05.2019 | |||
| CN 107575161 A, 11.01.2018 | |||
| CN 113216842 A, 06.08.2021. | |||

