Изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения морских целей по их шумоизлучению.
Одной из актуальных практических задач гидроакустики является определение координат цели по данным шумопеленгаторной станции (далее - ШПС). Для решения этой задачи предложено большое число способов [Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели. - Морская радиоэлектроника, 2012, №2 (40), с. 30-34].
Известна группа способов, которая базируется на использовании измеренной автокорреляционной функции (АКФ) широкополосного акустического сигнала для определения координат (дистанции и глубины) его источника [Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели. - Морская радиоэлектроника, 2012, №2 (40), с. 30-34; Hassab I.C. Contact Localization and Motion Analysis in the Ocean Environment: a Perspective. - IEEE Journal of Oceanic Engineering, 1983, vol. OE-8, №3, pp. 136-147; Quazi A.H., Lerro D.T. Passive localization using time-delay estimates with sensor positional errors. - JASA, 1985, vol. 78, №5. pp. 1664-1670; Worthmann B.M., Song H.C., Dowling D.R. High frequency source localization in a shallow ocean sound channel using frequency difference matched field processing. - Journal Acoust. Soc. Am., 2015, vol. 138, p.3549; Орлов Е.Ф., Фокин B.H., Шаронов Г.А. Исследование параметров интерференционной модуляции широкополосного звука в глубоком океане. -Акустический журнал, 1988, том 34, вып. 5, с. 902-907; Лазарев В.А., Орлов Е.Ф., Фокин В.Н., Шаронов Г.А. Частотная зависимость параметров интерференционной модуляции широкополосного звука в мелком море. - Акустический журнал, 1989, том 35, вып. 4, с. 685-688]. Информация о координатах источника сигнала (цели) в измеренной АКФ заключена в расположении на оси абсцисс (времени) узкополосных корреляционных максимумов (далее - КМ), обусловленных интерференцией коррелированных сигналов источника, пришедших на вход приемной гидроакустической антенны ШПС по различным лучам. Каждой паре лучей в АКФ (при достаточном отношении сигнал/помеха (далее - ОСП) [Машошин А.И. Исследование условий применимости корреляционной функции широкополосного многолучевого сигнала для оценки координат источника. - Акустический журнал, 2017, том 63, №3, с. 307-313]) соответствует один КМ с шириной, равной обратной величине эффективной полосы частот сигнала на входе антенны, и положением на оси абсцисс, равным абсолютной величине разности времен распространения сигнала по интерферирующим лучам.
Недостатком указанных способов является низкая точность определения координат цели. На практике в измеренной АКФ, как правило, обнаруживается малое число КМ и их набор на последовательных интервалах измерения АКФ не повторяется, что приводит к снижению точности оценки координат на каждом отдельном измерении.
Наиболее близким аналогом по количеству общих признаков и решаемым задачам к предлагаемому изобретению является способ определения координат морской шумящей цели [Машошин А.И., Мельканович B.C. Патент РФ №2690223 от 28.08.2018. Способ определения координат морской шумящей цели. МПК G01S 15/00], которое принято за прототип.
Способ по патенту №2690223 содержит:
- обнаружение широкополосного сигнала на выходе гидроакустической антенны ШПС (далее - антенна ШПС);
- измерение набора АКФ обнаруженного широкополосного сигнала цели на интервалах времени, составляющих интервал анализа;
- обнаружение в каждой измеренной АКФ из набора узкополосных КМ и измерение их абсцисс (относительных запаздываний);
- объединение абсцисс КМ, обнаруженных во всех измеренных АКФ интервала анализа, в единый массив;
- определение области возможного местоположения цели в пространстве «дистанция - глубина»;
- для каждой точки этой области:
- вычисление лучевой структуры сигнала на входе антенны ШПС с учетом текущих гидроакустических условий;
- для каждой возможной пары лучей вычисленной лучевой структуры вычисление абсциссы и ОСП КМ (далее - расчетный КМ), который должен быть образован в АКФ сигналами этой пары лучей;
- формирование массива расчетных КМ, для которых вычисленные значения ОСП превышают заданное пороговое значение для их обнаружения в АКФ;
- определение в сформированном массиве расчетных КМ количества КМ, абсциссы которых с учетом точности их измерения равны абсциссам КМ, обнаруженных в измеренной АКФ;
- принятие в качестве координат цели координаты той точки в области возможного местоположения цели в пространстве «дистанция - глубина», которой соответствует наибольшее количество расчетных КМ, абсциссы которых равны абсциссам КМ, обнаруженных в измеренной АКФ.
Объединение в единый массив КМ, обнаруженных в совокупности АКФ, измеренных на временном интервале анализа, позволяет увеличить объем и достоверность входных данных, что повышает точность оценки координат цели. Но в ряде случаев этой входной информации оказывается недостаточно для устранения неоднозначности оценки местоположения цели. Это особенно важно для гидроакустических условий глубокого моря, в которых потенциально возможное количество лучей на входе антенны ШПС, исходя из вычисленной лучевой структуры сигнала для большинства возможных местоположений цели, составляет не больше 4-х лучей. В результате объединенный массив КМ будет содержать малое количество КМ (1-6 КМ), и велика вероятность получения многозначного решения задачи [Машошин А.И. Исследование условий применимости корреляционной функции широкополосного многолучевого сигнала для оценки координат источника. - Акустический журнал, 2017, том 63, №3, с. 307-313, Хилько А.И., Смирнов И.П., Машошин А.И., Шафранюк А.В. Исследование когерентности акустических полей высокочастотных шумовых источников в случайно неоднородной среде. - Акустический журнал, 2018, том 64, №2, с. 217-227], то есть будет получено несколько точек, которым соответствует наибольшее количество расчетных КМ, абсциссы которых равны абсциссам КМ, обнаруженных в измеренной АКФ. В этом случае способ-прототип не позволяет устранить неоднозначность оценки местоположения цели.
Таким образом недостаток способа-прототипа заключается в том, что при выполнении поиска соответствия расчетных КМ с массивом КМ, обнаруженных в АКФ, используется не вся информация, содержащаяся в АКФ принятого сигнала, а именно, не учитываются уровни (интенсивности) сопоставляемых КМ (ординаты КМ в АКФ), что в ряде случаев может приводить к получению многозначного решения задачи.
Задачей изобретения является - повышение эксплуатационных характеристик шумопеленгаторной станции.
Техническим результатом предложенного изобретения является повышение точности определения координат морской шумящей цели, которое достигается за счет использования энергетических уровней КМ при их сопоставлении и корреляционного критерия близости для устранения неоднозначности оценки местоположения цели.
Для достижения данного технического результата в способ определения координат морской шумящей цели, включающий прием гидроакустической антенной сигнала морской шумящей цели, обнаружение на выходе шумопеленгаторной станции широкополосного сигнала цели, измерение набора АКФ на ряде последовательных интервалов времени, обнаружение в каждой из измеренных АКФ узкополосных КМ, измерение их абсцисс, объединение абсцисс КМ, обнаруженных в АКФ на ряде последовательных интервалов времени, в единый массив, перебор точек возможного местоположения цели в пространстве «дистанция - глубина», вычисление для каждой точки с учетом текущих гидроакустических условий лучевой структуры сигнала на входе гидроакустической антенны шумопеленгатора, вычисление для каждой возможной пары лучей вычисленной лучевой структуры абсциссы КМ (далее - расчетный КМ), который должен быть порожден в АКФ этой парой лучей, формирование для всех пар лучей массива расчетных КМ, введены новые признаки, а именно: для обнаружения сигнала цели формируют статический многоярусный веер характеристик направленности (ХН) гидроакустической антенны в вертикальной плоскости (ВВХН) (не менее пяти углов наклона ХН (ярусов)), измерение набора АКФ проводят в ярусе с максимальным отношением сигнал/помеха, для каждого КМ, обнаруженного в измеренных АКФ, измеряют его ординату, объединяют абсциссы и ординаты КМ, обнаруженных во всех измеренных АКФ интервала анализа, формируют единый двумерный массив КМ принятого сигнала для оптимального яруса приема, вычисление для каждой точки области возможного местоположения морской шумящей цели лучевой и энергетической структуры сигнала выполняют на выходе пространственных каналов ярусов ВВХН ШПС, для каждой точки области и для каждой пары лучей вычисленной лучевой структуры вычисляют интенсивности каждого расчетного КМ в каждом ярусе ВВХН, для каждой точки области формируют двумерный массив расчетных КМ, который содержит абсциссы КМ и интенсивности КМ, вычисленные в ярусе ВВХН, соответствующем оптимальному ярусу принятого сигнала, вычисляют для каждой точки области возможного местоположения цели коэффициент корреляции между сформированным для нее массивом расчетных КМ и массивом КМ принятого сигнала и определяют координаты цели путем выбора координат той точки возможного местоположения цели, для которой получено наибольшее значение коэффициента корреляции.
Достижение указанного технического результата обеспечивается тем, что
- обнаружение сигнала цели на выходе ВВХН и измерение набора АКФ на ряде последовательных интервалов времени в ярусе с максимальным ОСП позволяет измерить уровни КМ принятого сигнала для оптимального яруса приема и сформировать двумерный массив КМ принятого сигнала, объединяющий абсциссы и ординаты КМ.
- вычисление для каждой точки области возможного местоположения цели лучевой и энергетической структуры сигнала на выходе пространственных каналов ярусов ВВХН ШПС и вычисление для каждой пары лучей вычисленной лучевой структуры энергетических уровней (интенсивностей) каждого расчетного КМ в каждом ярусе ВВХН позволяет выбрать интенсивности КМ, вычисленные в ярусе ВВХН, соответствующем оптимальному ярусу принятого сигнала и сформировать для каждой точки области двумерный массив расчетных КМ, объединяющий абсциссы и интенсивности КМ.
- вычисление для каждой точки области возможного местоположения цели коэффициента корреляции между сформированным для нее массивом расчетных КМ и массивом КМ принятого сигнала и определение координат цели путем выбора координат той точки возможного местоположения цели, для которой получено наибольшее значение коэффициента корреляции в большинстве случаев позволяет устранить неоднозначность оценки местоположения цели, а следовательно, повышает точность определения ее координат.
Сущность изобретения поясняется фиг. 1, 2 и 3, где на фиг. 1 приведена блок-схема обработки сигналов в соответствии с предлагаемым способом, на фиг. 2 - сопоставление результатов оценки дальности и глубины, полученных способом-прототипом (фиг. 2а и заявляемым способом (фиг. 2б для одного из вариантов расположения источника сигнала в осенних гидроакустических условиях Японского моря (фиг. ).
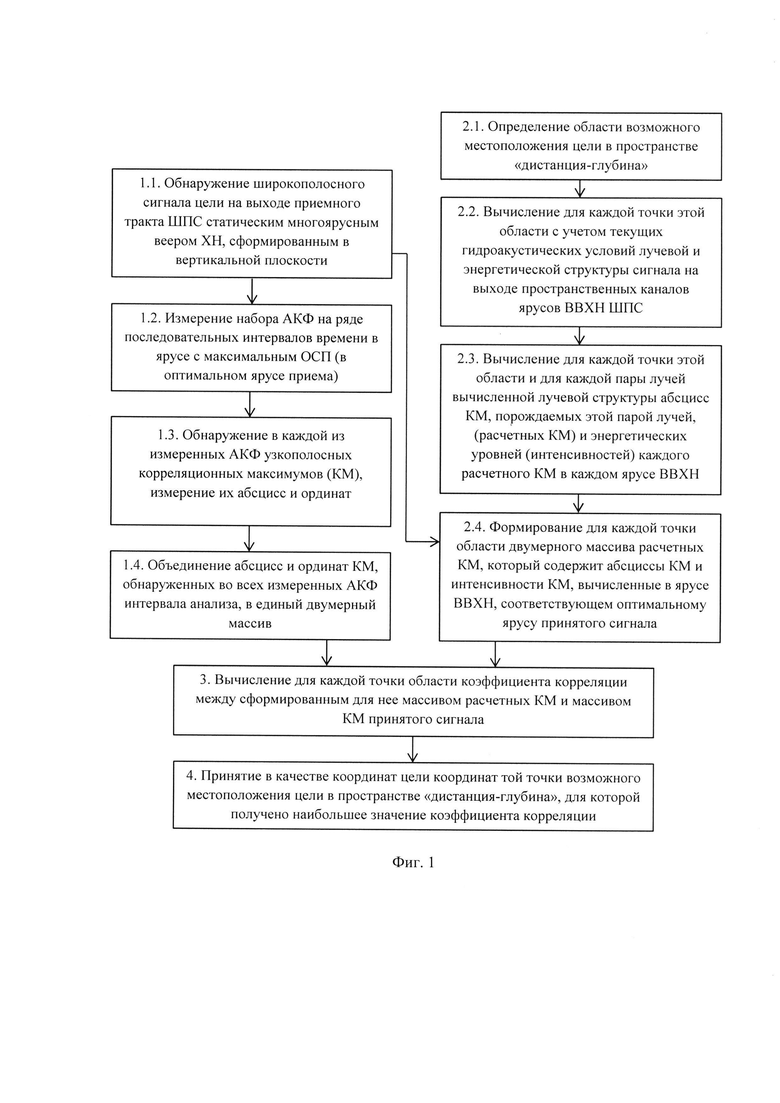
При реализации способа (фиг. ) обработка ведется на первоначальном этапе двумя параллельными ветвями.
Первая ветвь включает в себя последовательно выполняемые операции: обнаружение широкополосного сигнала цели на выходе приемного тракта ШПС статическим многоярусным веером ХН, сформированным в вертикальной плоскости (блок 1.1); измерение набора АКФ обнаруженного широкополосного сигнала цели на ряде последовательных интервалов времени в ярусе с максимальным ОСП (в оптимальном ярусе приема) (блок 1.2); обнаружение в каждой из измеренных АКФ КМ, измерение их абсцисс и ординат (блок 1.3); объединение абсцисс и ординат КМ, обнаруженных во всех измеренных АКФ интервала анализа, в единый двумерный массив (блок 1.4).
Выполнение перечисленных операций обеспечивает формирование двумерного массива КМ принятого сигнала, используемого для сопоставления с аналогичными двумерными массивами, полученными на основе расчетных данных, формируемых блоками второй ветви.
Вторая ветвь включает в себя операции: определение области возможного местоположения цели в пространстве «дистанция - глубина» (блок 2.1); вычисление для каждой точки этой области с учетом текущих гидроакустических условий лучевой и энергетической структуры сигнала на выходе пространственных каналов ярусов ВВХН ШПС (блок 2.2); вычисление для каждой точки этой области и для каждой пары лучей вычисленной лучевой структуры абсцисс КМ, порождаемых этой парой лучей, (расчетных КМ) и энергетических уровней (интенсивностей) каждого расчетного КМ в каждом ярусе ВВХН (блок 2.3); формирование для каждой точки области двумерного массива расчетных КМ, который содержит абсциссы КМ и интенсивности КМ, вычисленные в ярусе ВВХН, соответствующем оптимальному ярусу принятого сигнала (блок 2.4). Операции 2.1 - 2.3 второй ветви могут быть выполнены однократно для текущего состояния гидроакустических условий, определяющего лучевую структуру сигналов. Для выполнения операции 2.4 необходимо получить из блока 1.1. первой ветви номер оптимального яруса приема. Выполнение операций второй ветви обеспечивает формирование для каждой точки возможного местоположения цели двумерного массива расчетных КМ, которые используются для сопоставления с двумерным массивом КМ принятого сигнала, сформированным первой ветвью.
Сопоставление выполняется последовательно расположенными блоками 3 и 4, выполняющими операции вычисления для каждой точки области коэффициента корреляции между сформированным для нее массивом расчетных КМ и массивом КМ принятого сигнала (блок 3) и, наконец, операцию определения координат цели путем выбора координат той точки возможного местоположения цели в пространстве «дистанция - глубина», для которой получено наибольшее значение коэффициента корреляции (блок 4).
Предложенный способ может быть реализован посредством известной в гидроакустике аппаратуры, например гидроакустическая антенна ШПС известна из [Литвиненко С.Л. Патент РФ №2515133 от 13.11.2012. Сферическая гидроакустическая антенна. МПК G01S 15/00], при этом антенные модули могут быть выполнены согласно [Смарышев М.Д., Черняховский А.Е., Иванов A.M., Шатохин А.В., Селезнев И.А., Никандров В.А., Маляров К.В., Барсуков Ю.В. Патент РФ №2539819 от 24.10.2013. Антенный модуль с цифровым выходом. МПК H04R 1/44], а формирование многоярусного веера характеристик направленности в вертикальной плоскости согласно [Баскин В.В., Гришман Г.Д., Казаков М.Н., Криницкий A.M., Леоненок Б.И., Смарышев М.Д. Патент РФ №2293449 от 03.05.2005. Способ формирования частотно независимой характеристики направленности рабочим сектором многоэлементной гидроакустической приемной круговой антенны. МПК H04R 1/44, G01S 15/02].
Вычисление лучевой и энергетической структуры сигнала на выходе пространственных каналов ярусов ВВХН ШПС и вычисление энергетических уровней расчетных КМ может быть выполнено согласно [Авилов К.В., Добряков Н.А., Попов О.Е. Комплекс программных средств для вычисления звуковых полей в морской среде, неоднородной по глубине и трассе распространения //Акустика океана. Доклады X школы-семинара акад. Л.М. Бреховских. М.: ГЕОС, 2004. С. 27].
Вычисление коэффициента корреляции может быть выполнено по формуле, приведенной в [Деза Е.И., Деза М.М. Энциклопедический словарь расстояний. Пер. с англ. М.: Наука, 2008].
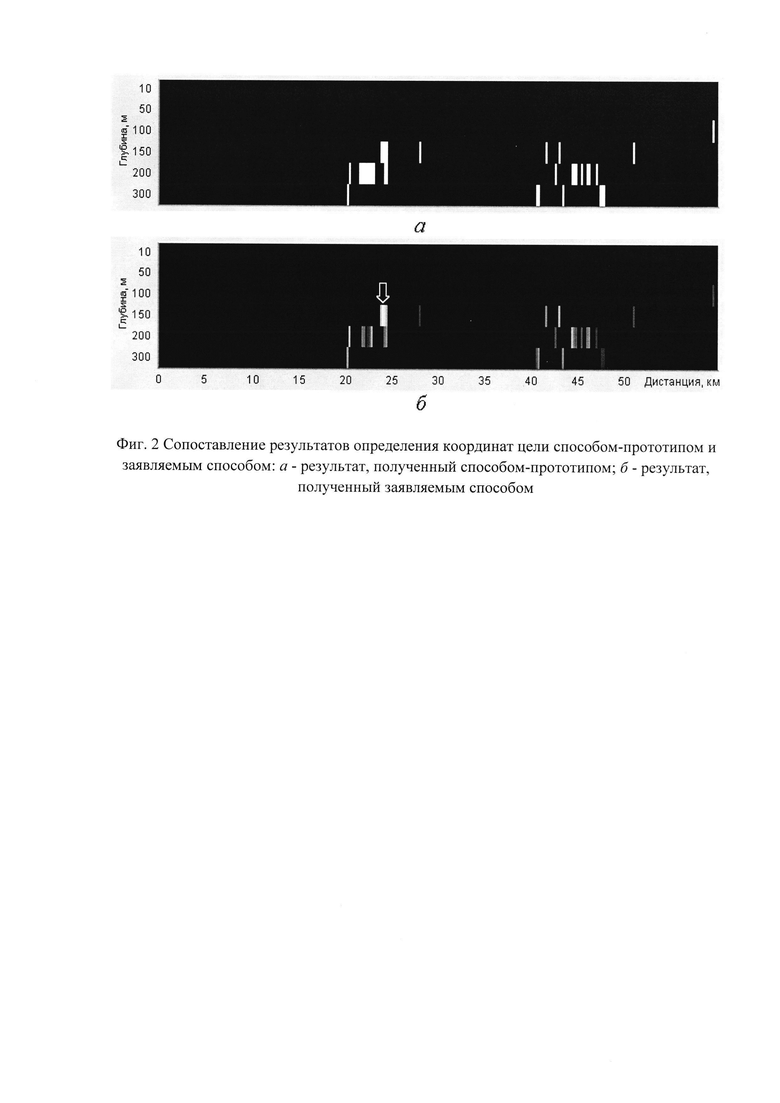
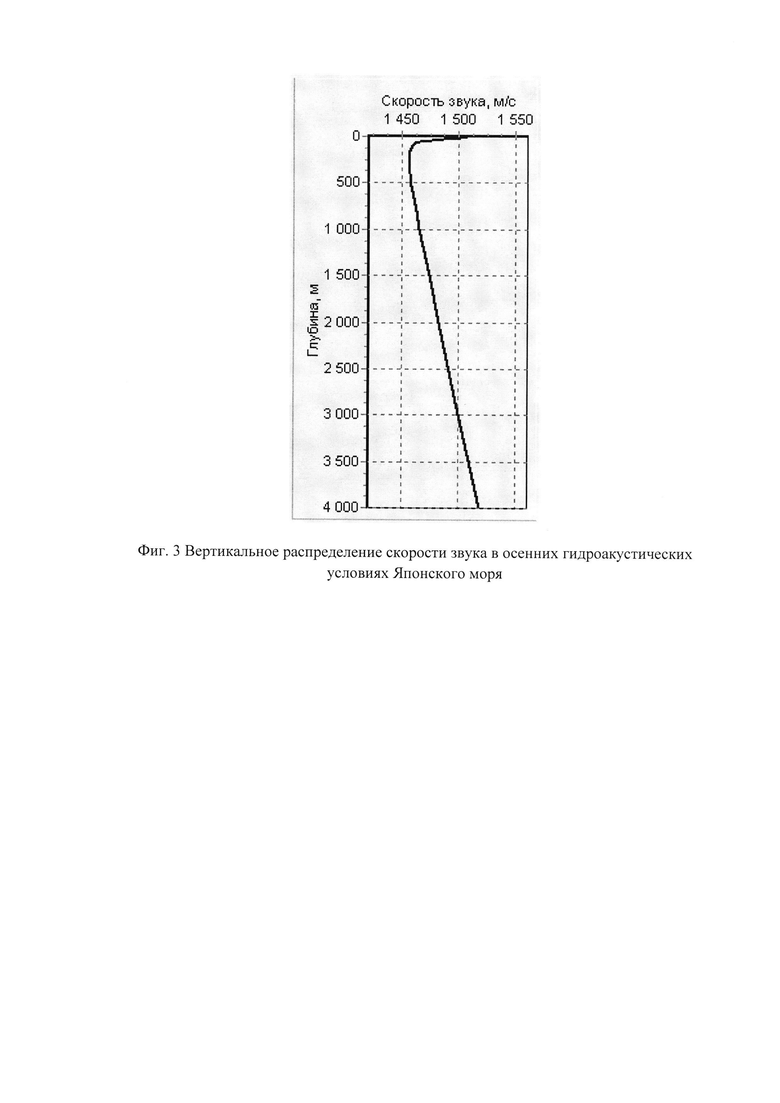
Эффективность данного технического решения подтверждена вычислительными экспериментами. В качестве примера приведены результаты определения координат цели способом-прототипом и заявляемым способом в условиях зональной структуры гидроакустического поля (фиг. 2). На (фиг. 3) приведен график вертикального распределения скорости звука в рассматриваемых гидроакустических условиях. В качестве положения источника сигнала задана точка с координатами 24 км по дистанции и 150 м по глубине. При таком положении источника в наборе АКФ принятого сигнала может быть обнаружено 5 КМ с абсциссами 1.05 мс, 2.14 мс, 3.33 мс, 4.98 мс и 5.55 мс.
На фиг. 2а приведен результат оценки дальности и глубины, полученный способом-прототипом. Белым цветом показаны такие положения цели по дистанции и глубине, при которых количество КМ, расчетные значения абсцисс которых с учетом точности их измерения равны абсциссам КМ принятого сигнала, оказалось равным 5-ти. То есть результат определения координат цели способом-прототипом оказался многозначным.
В свою очередь, заявляемый способ обеспечил получение однозначного результата. На фиг. 2б яркостью показаны вычисленные значения коэффициента корреляции между сформированным для соответствующей точки области массивом расчетных КМ и массивом КМ принятого сигнала. Стрелкой показано такое положение источника сигнала, которое соответствует максимальному значению коэффициента корреляции. Можно видеть, что найденное положение совпадает с фактическим положением источника (24 км по дистанции и 150 м по глубине), что подтверждает высокую точность определения координат цели.
Таким образом, заявленный технический результат - повышение точности определения координат шумящей цели на основе информации, содержащейся в АКФ ее сигнала, - можно считать достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат морской шумящей цели | 2021 |
|
RU2782843C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ определения координат морской шумящей цели | 2018 |
|
RU2690223C1 |
| Способы определения координат морской шумящей цели | 2023 |
|
RU2812119C1 |
| Способы определения координат морской шумящей цели | 2022 |
|
RU2797161C1 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
Изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения морских целей по их шумоизлучению, а точнее к способам определения координат целей с использованием корреляционных максимумов в автокорреляционной функции шума цели. Технический результат - повышение точности определения координат шумящей цели. Указанный технический результат достигается путем измерения ординат (интенсивностей) корреляционных максимумов (КМ) в автокорреляционных функциях (АКФ), измеренных в ярусе с максимальным отношением сигнал/помеха статическим многоярусным веером характеристик направленности, сформированным в вертикальной плоскости (ВВХН), объединения абсцисс и ординат КМ в двумерный массив КМ принятого сигнала, вычисления для каждой точки области возможного местоположения цели и для каждой пары лучей вычисленной лучевой структуры интенсивности каждого расчетного КМ в каждом ярусе ВВХН, формирования для каждой точки области двумерного массива расчетных КМ, который содержит абсциссы КМ и интенсивности КМ, вычисленные в ярусе ВВХН, соответствующем оптимальному ярусу принятого сигнала, вычисления для каждой точки области коэффициента корреляции между сформированным для нее массивом расчетных КМ и массивом КМ принятого сигнала и определения координат цели путем выбора координат той точки возможного местоположения цели, для которой получено наибольшее значение коэффициента корреляции. 3 ил.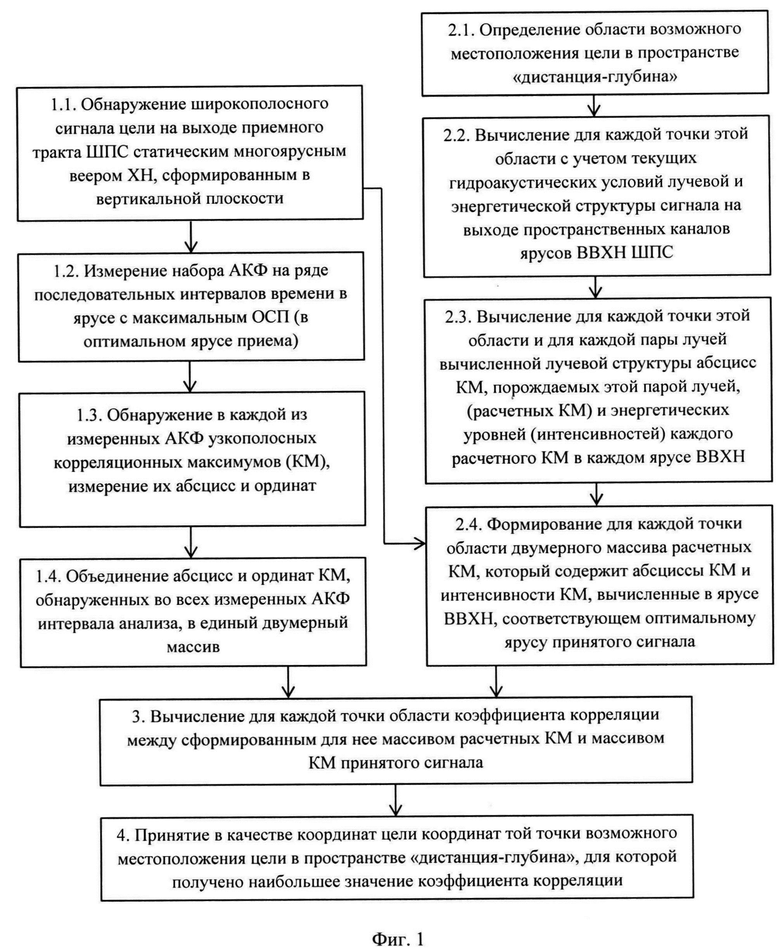
Способ определения координат морской шумящей цели, включающий прием гидроакустической антенной сигнала морской шумящей цели, обнаружение на выходе шумопеленгаторной станции широкополосного сигнала цели, измерение набора автокорреляционных функций (АКФ) на ряде последовательных интервалов времени, обнаружение в каждой из измеренных АКФ узкополосных корреляционных максимумов (КМ), измерение их абсцисс, объединение абсцисс КМ, обнаруженных в АКФ на ряде последовательных интервалов времени, в единый массив, перебор точек возможного местоположения цели в пространстве «дистанция - глубина», вычисление для каждой точки с учетом текущих гидроакустических условий лучевой структуры сигнала на входе гидроакустической антенны шумопеленгатора, вычисление для каждой возможной пары лучей вычисленной лучевой структуры абсциссы КМ (далее - расчетный КМ), который должен быть порожден в АКФ этой парой лучей, формирование для всех пар лучей массива расчетных КМ, отличающийся тем, что для обнаружения сигнала цели формируют статический многоярусный веер характеристик направленности (ХН) гидроакустической антенны в вертикальной плоскости (ВВХН) (не менее пяти углов наклона ХН (ярусов)), измерение набора АКФ проводят в ярусе с максимальным отношением сигнал/помеха, для каждого КМ, обнаруженного в измеренных АКФ, измеряют его ординату, объединяют абсциссы и ординаты КМ, обнаруженных во всех измеренных АКФ интервала анализа, формируют единый двумерный массив КМ принятого сигнала для оптимального яруса приема, вычисление для каждой точки области возможного местоположения морской шумящей цели лучевой и энергетической структуры сигнала выполняют на выходе пространственных каналов ярусов ВВХН ШПС, для каждой точки области и для каждой пары лучей вычисленной лучевой структуры вычисляют интенсивности каждого расчетного КМ в каждом ярусе ВВХН, для каждой точки области формируют двумерный массив расчетных КМ, который содержит абсциссы КМ и интенсивности КМ, вычисленные в ярусе ВВХН, соответствующем оптимальному ярусу принятого сигнала, вычисляют для каждой точки области возможного местоположения цели коэффициент корреляции между сформированным для нее массивом расчетных КМ и массивом КМ принятого сигнала и определяют координаты цели путем выбора координат той точки возможного местоположения цели, для которой получено наибольшее значение коэффициента корреляции.
| Способ определения координат морской шумящей цели | 2018 |
|
RU2690223C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2017 |
|
RU2680860C1 |
| Способ приема сигналов в системе цифровой связи с компенсацией помех, обусловленных многолучевой интерференцией | 2016 |
|
RU2637422C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2654365C1 |
| US 5805525 A1, 08.09.1998. | |||

