Изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения морских целей по их шумоизлучению.
Одной из актуальных практических задач гидроакустики является определение координат морской шумящей цели (далее - цели) по данным шумопеленгаторной станции (далее - ШПС). Для решения этой задачи известно большое число способов, обзор которых приведён в [1].
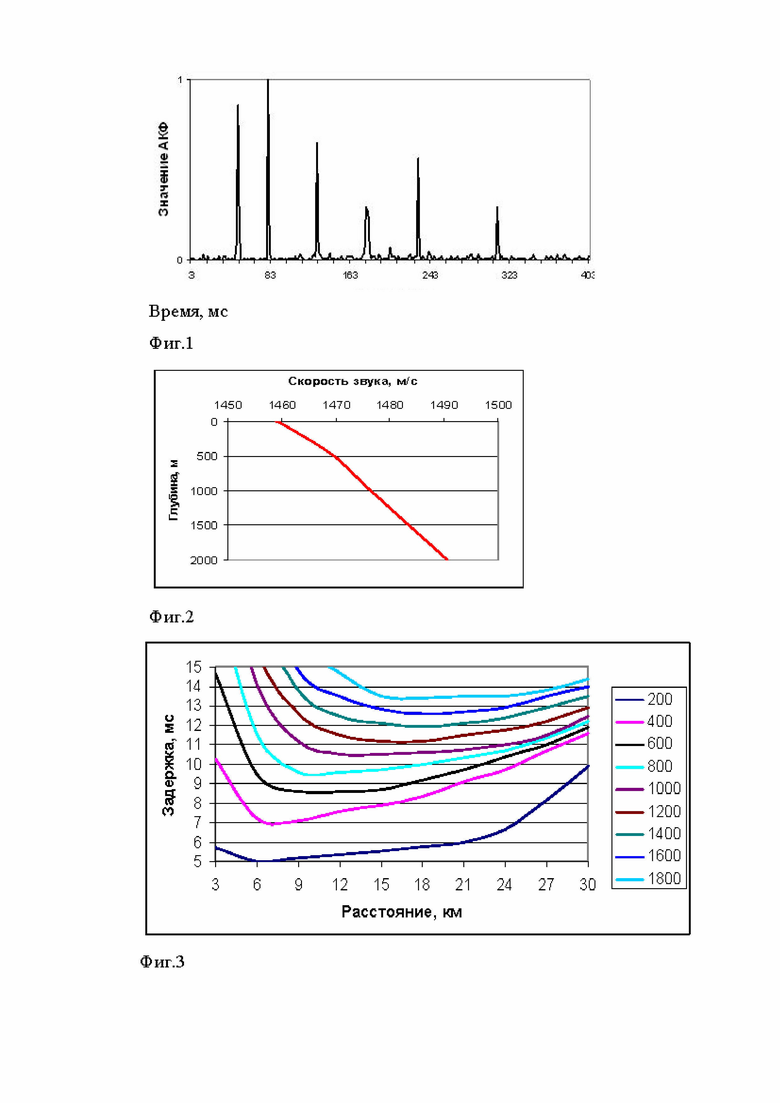
Один из способов базируется на использовании измеренной автокорреляционной функции (далее - АКФ) широкополосного акустического сигнала (далее - сигнала) для определения координат (дистанции и глубины) источника сигнала [1-8]. Информация о координатах источника сигнала (цели) в измеренной АКФ заключена в расположении на оси абсцисс (времени) узкополосных интерференционных максимумов (далее - ИМ), обусловленных интерференцией коррелированных сигналов источника, пришедших на вход приёмной гидроакустической антенны (далее - антенны) ШПС по различным лучам. Каждой паре лучей в АКФ (при достаточном отношении сигнал/помеха - ОСП) соответствует один ИМ с шириной, равной обратной величине эффективной полосы частот сигнала на входе антенны, и положением на оси абсцисс, равным абсолютной величине разности времён распространения сигнала по интерферирующим лучам [9]. На фиг. 1 в качестве иллюстрации приведена АКФ сигнала источника, пришедшего на антенну по четырём акустическим лучам.
Определение координат источника сигнала рассматриваемым способом состоит в поиске такого положения источника сигнала по дистанции и глубине, для которого расчет параметров акустических лучей с использованием лучевой программы [10] показывает наличие в АКФ на выходе антенны ИМ, количество которых и расположение на оси абсцисс максимально близко количеству и расположению ИМ в измеренной АКФ.
Главным недостатком описанного способа является многозначность результата определения координат источника сигнала. Устранению этого недостатка посвящены изобретения [7, 8]. Однако они справляются с проблемой лишь в отдельных ограниченных условиях.
Проведённые исследования показали, что многозначность результата проявляется существенно реже, если известна одна из двух координат источника - дальность либо глубина. Этот факт иллюстрируется на фиг. 3, на которой для условий сплошной акустической освещённости в глубоком море с вертикальным распределением скорости звука, изображённым на фиг. 2, приведены зависимости от расстояния между источником и приёмником (ось абсцисс) и глубины источника (параметр графика в метрах) абсциссы наибольшего по уровню максимума в АКФ, обусловленной относительным запаздыванием (задержкой) прихода на антенну двух наиболее мощных лучей. За редким исключением, наибольший по уровню максимум в АКФ образуется вследствие интерференции прямого луча и луча, однократно отражённого от поверхности.
Из рассмотрения фиг. 3 следует:
- при известной глубине источника имеет место взаимно однозначное соответствие между дистанцией до источника и абсциссой наибольшего по уровню максимума в АКФ;
- при известной дистанции до источника имеет место взаимно однозначное соответствие между глубиной источника и абсциссой наибольшего по уровню максимума в АКФ;
Этот факт делает возможным определение глубины источника, если известна дистанция до него и, наоборот, определение дистанции до источника, если известна его глубина.
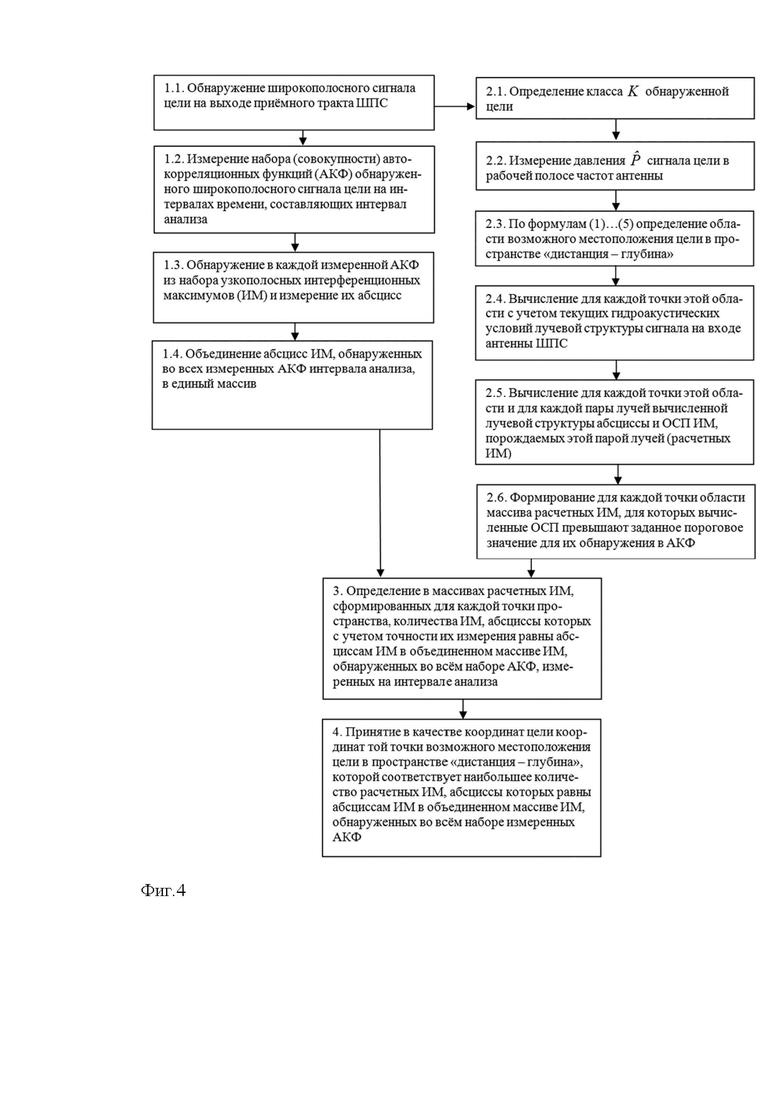
В качестве способа-прототипа выберем изобретение [7]. На фиг. 4 приведена его блок-схема. Обработка поступающей информации ведется на вычислительном устройстве, подключённым к ШПС, по двум параллельным ветвям одновременно.
Первая (левая) ветвь включает в себя последовательно выполняемые операции обнаружения широкополосного сигнала цели на выходе антенны (блок 1.1); измерения набора АКФ обнаруженного широкополосного сигнала цели на интервалах времени, составляющих интервал анализа (блок 1.2); обнаружение в каждой измеренной АКФ из набора АКФ узкополосных ИМ и измерения их абсцисс (блок 1.3); объединение абсцисс ИМ, обнаруженных во всех измеренных АКФ интервала анализа, в единый массив (блок 1.4). Выполнение перечисленных операций обеспечивает формирование массива всех ИМ, измеренных на интервале анализа и готовых к сопоставлению с расчетными данными, формируемыми блоками второй ветви.
Вторая ветвь (правая) включает в себя определение класса источника, измерение давления его сигнала на выходе приёмного тракта ШПС и с их использованием определение области возможного местоположения цели в пространстве «дистанция - глубина» (блок 2.1); вычисления для каждой точки этой области с учетом текущих гидроакустических условий лучевой структуры сигнала на входе антенны ШПС (блок 2.2); вычисления для каждой точки этой области и для каждой пары лучей из вычисленной лучевой структуры значений абсциссы и ОСП расчётных ИМ, порождаемых этой парой лучей (блок 2.3) и операцию формирования для каждой точки области массива расчетных ИМ, для которых вычисленные ОСП превышают заданное пороговое значение для их обнаружения в АКФ (блок 2.4). Операции второй ветви могут быть выполнены однократно для текущего состояния гидрологических условий, определяющего лучевую структуру сигналов на входе антенны. Выполнение операций второй ветви обеспечивает формирование массива расчетных данных, готовых к сопоставлению с результатами измерений, сформированными первой ветвью.
Сопоставление выполняется последовательно расположенными блоками 3 и 4, выполняющими операции определения в массивах расчетных ИМ, сформированных для каждой точки пространства, количества ИМ, абсциссы которых с учетом точности их измерения равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всём наборе АКФ, измеренных на интервале анализа (блок 3) и, наконец, операцию определения координат цели путем выбора координат той точки возможного местоположения цели в пространстве «дистанция - глубина», которой соответствует наибольшее количество расчетных ИМ, абсциссы которых равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всём наборе измеренных АКФ (блок 4).
Недостатком способа-прототипа, несмотря на принятые меры, является высокая вероятность получения многозначного решения.
Решаемая техническая проблема - повышение эксплуатационных характеристик шумопеленгаторной станции.
Технический результат, обеспечиваемый изобретением - повышение точности определения координат морской шумящей цели.
Указанный технический результат достигается в случаях, когда известна одна из двух координат цели - дистанция либо глубина. Эти случаи достаточно распространены на практике. Например, дистанция до обнаруженной цели может быть определена в режиме гидролокации либо путём взаимного позиционирования по сигналам гидроакустической связи [11]. Глубина цели, как правило, известна при взаимодействии нескольких морских объектов в группе [12].
В результате заявляется 2 независимых способа:
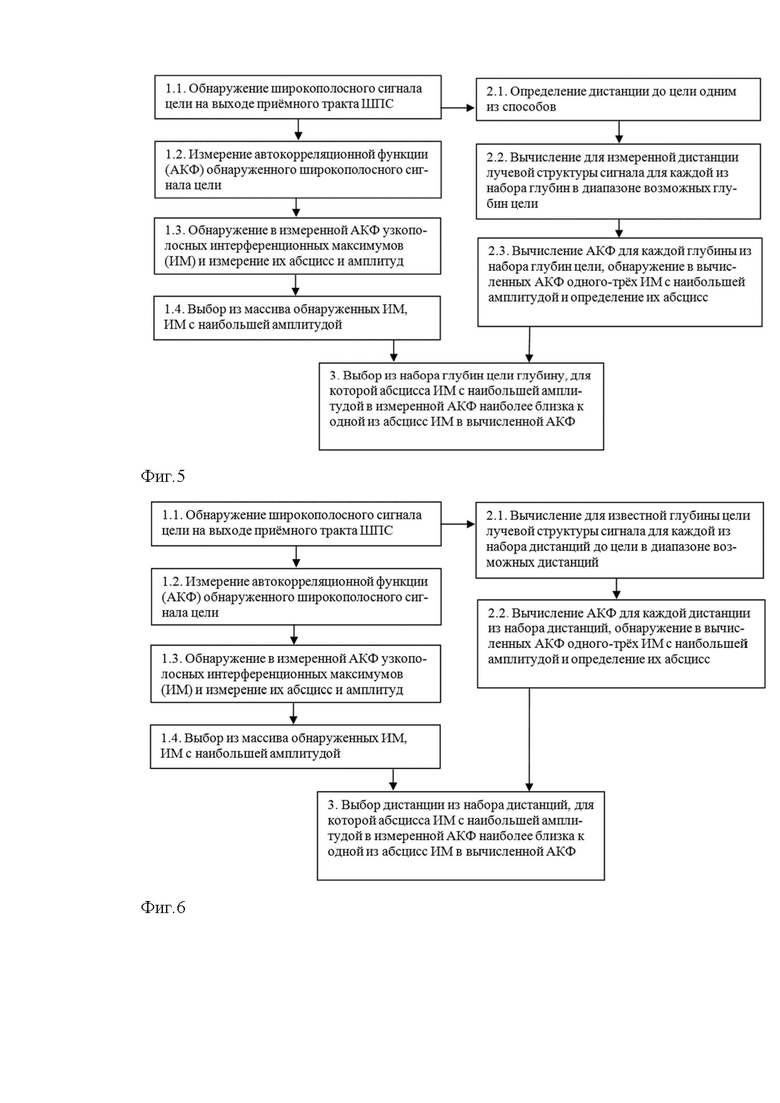
- способ определения глубины морской шумящей цели, блок-схема которого приведена на фиг. 5;
- способ определения дистанции до морской шумящей цели, блок-схема которого приведена на фиг. 6.
В обоих способах, как и в способе-прототипе, обработка входного сигнала ведётся по двум параллельным ветвям. Первая (левая) ветвь, идентичная для обоих способов, включает в себя последовательно выполняемые операции:
- обнаружение широкополосного сигнала цели на выходе приёмного тракта ШПС (блок 1.1);
- измерение АКФ обнаруженного широкополосного сигнала цели (блок 1.2);
- обнаружение в измеренной АКФ узкополосных ИМ и измерение их абсцисс и амплитуд (блок 1.3);
- выбор из массива обнаруженных ИМ, ИМ с наибольшей амплитудой, определение и запоминание его абсциссы (блок 1.4).
Вторая ветвь (правая) для способа определения глубины морской шумящей цели включает в себя следующие операции (фиг. 5):
- определение дистанции до цели одним из известных [1, 11] способов (блок 2.1);
- вычисление для измеренной дистанции лучевой структуры сигнала для каждой из набора глубин в диапазоне возможных глубин цели (блок 2.2);
- вычисление АКФ для каждой глубины из набора глубин цели, обнаружение в вычисленных АКФ одного-трёх ИМ с наибольшей амплитудой и определение их абсцисс (блок 2.3).
В блоке 3 на фиг. 5 осуществляется сопоставление абсциссы наибольшего по уровню ИМ в измеренной АКФ с абсциссами ИМ в вычисленных АКФ для каждой глубины из набора глубин. В качестве глубины цели выбирается та глубина, для которой абсцисса ИМ с наибольшей амплитудой в измеренной АКФ наиболее близка к одной из абсцисс ИМ в вычисленной АКФ.
Вторая ветвь (правая) для способа определения дистанции до цели включает в себя следующие операции (фиг. 6):
- вычисление для известной глубины цели лучевой структуры сигнала для каждой из набора дистанций в диапазоне возможных дистанций до цели (блок 2.1);
- вычисление АКФ для каждой дистанции из набора дистанций, обнаружение в вычисленных АКФ одного-трёх ИМ с наибольшей амплитудой и определение их абсцисс (блок 2.2).
В блоке 3 на фиг. 6 осуществляется сопоставление абсциссы наибольшего по амплитуде ИМ в измеренной АКФ с абсциссами ИМ в вычисленной АКФ для каждой дистанции из набора дистанций. В качестве дистанции до цели выбирается та дистанция, для которой абсцисса ИМ с наибольшим уровнем в измеренной АКФ наиболее близка к одной из абсцисс ИМ в рассчитанной АКФ.
Примеры осуществления заявляемых способов:
1) при групповом использовании автономных необитаемых подводных аппаратов (например, в задаче поиска залежей углеводородов на морском дне [12]) необходимо постоянного контролировать взаимное расстояние между аппаратами. Поскольку глубины аппаратов в этом известны (заданы), заявляемый способ позволяет по измеренной абсциссе наибольшего по амплитуде максимума в АКФ шума определить дистанцию до аппарата;
2) при необходимости определить глубину погружения обнаруженного подводного источника шума измеряют дистанцию до него в активном режиме, а затем заявляемым способом определяют его глубину.
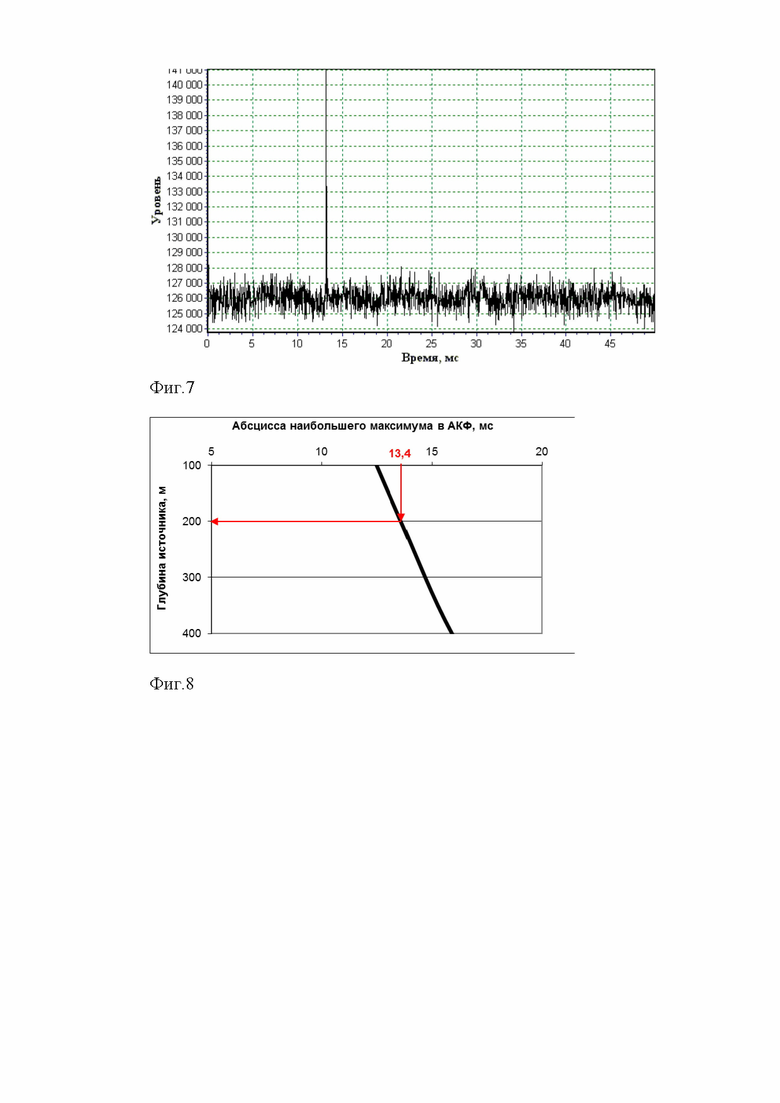
Заявляемый способ определения глубины объекта проверен экспериментально. Эксперимент проводился в условиях сплошной акустической освещённости с вертикальным распределением скорости звука, изображённым на фиг. 2. Источник широкополосного (в полосе 1-5 кГц) акустического сигнала находился на глубине 200 м. Приемная антенна ШПС располагалась на глубине 50 м. Горизонтальное расстояние между источником и приёмником составляло 1 км. ОСП на выходе приёмного тракта ШПС составляло 15 дБ.
Сигнал источника на выходе приёмного тракта ШПС подвергался автокорреляционному анализу. Измеренная АКФ приведена на графике фиг. 7, по оси абсцисс которого отложено время в мс, по оси ординат - уровень АКФ в относительных единицах. В измеренной АКФ выделялся наибольший по амплитуде ИМ, абсцисса которого равна 13,4 мс.
Для условий эксперимента был выполнен расчёт лучевой структуры поля сигнала и по его результатам вычислена абсцисса наибольшего по амплитуде ИМ в АКФ в зависимости от глубины источника, которая изображена на фиг. 8.
Войдя в график на фиг. 8 с абсциссой ИМ 13,4 мс в измеренной АКФ, получаем оценку глубины источника 200 м, что соответствует условиям эксперимента.
Таким образом, заявленный технический результат - повышение точности определения координат шумящей цели, - можно считать достигнутым.
Источники информации:
1. Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели // Морская радиоэлектроника. 2012. №2 (40). С. 30-34.
2. Hassab I. C. Contact Localization and Motion Analysis in the Ocean Environment: a Perspective // IEEE Journal of Oceanic Engineering. 1983. Vol. OE-8, №3. P.136-147.
3. Quazi A.H., Lerro D.T. Passive localization using time-delay estimates with sensor positional errors // JASA. 1985. Vol. 78, № 5. P.1664-1670.
4. Worthmann B.M., Song H.C., Dowling D.R. High frequency source localization in a shallow ocean sound channel using frequency difference matched field processing // Journal Acoust. Soc. Am. 2015. Vol. 138. P.3549.
5. Орлов Е.Ф., Фокин В.Н., Шаронов Г.А. Исследование параметров интерференционной модуляции широкополосного звука в глубоком океане // Акустический журнал. 1988. Т. 34, вып. 5. С. 902-907.
6. Лазарев В.А., Орлов Е.Ф., Фокин В.Н., Шаронов Г.А. Частотная зависимость параметров интерференционной модуляции широкополосного звука в мелком море // Акустический журнал. 1989. Том 35, вып. 4. С. 685-688.
7. Патент РФ №2690223.
8. Патент РФ №2724962.
9. Машошин А.И. Помехоустойчивость выделения максимумов в корреляционной функции широкополосного шумового сигнала морского объекта, обусловленных многолучевым распространением сигнала в водной среде // Акустический журнал. 2001. Том 47, № 6. С. 823-829.
10. Гидроакустические расчёты для станции шумопеленгования. Авторы Марасёв С.В., Машошин А.И. Свидетельство о регистрации № 2021617661 от 26.04.2021г. Заявка № 2021615792 от 22.04.2021 г. Дата гос. регистрации 26.04.2021 г. Правообладатель - Акционерное общество «Концерн «Центральный научно-исследовательский институт «Электроприбор».
11. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы // СПб.: Наука, 2004.
12. Сахаров В.В., Чертков А.А., Тормашев Д.С. Алгоритм оптимального планирования группового взаимодействия роботов // Морской вестник. 2014. № 4 (52). С. 119-122.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способы определения координат морской шумящей цели | 2023 |
|
RU2812119C1 |
| Способ определения координат морской шумящей цели | 2018 |
|
RU2690223C1 |
| Способ определения координат морской шумящей цели | 2020 |
|
RU2740169C1 |
| Способ определения координат морской шумящей цели | 2021 |
|
RU2782843C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ локализации в пространстве шумящего в море объекта | 2022 |
|
RU2788341C1 |
Использование: изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения морских целей по их шумоизлучению, а точнее к способам определения координат целей с использованием интерференционных максимумов в автокорреляционной функции шума цели. Сущность: в способе на выходе шумопеленгатора обнаруживается широкополосный сигнал цели, измеряется его автокорреляционная функция (АКФ), в которой обнаруживаются узкополосные интерференционные максимумы (ИМ), из которых выбирается ИМ с наибольшим уровнем и запоминается его абсцисса (т.е. положение на оси задержек). При известной дистанции до цели, для неё и набора глубин в диапазоне возможных глубин цели с помощью лучевой программы расчёта акустического поля источника рассчитывают лучевую структуру сигнала цели, с использованием которой вычисляют абсциссы одного-трёх ИМ с наибольшим уровнем в АКФ. В качестве глубины цели выбирают ту глубину из набора глубин, для которой абсцисса ИМ с наибольшим уровнем в измеренной АКФ оказалась наиболее близка к одной из вычисленных абсцисс ИМ. Технический результат: повышение точности определения координат шумящей цели. 8 ил.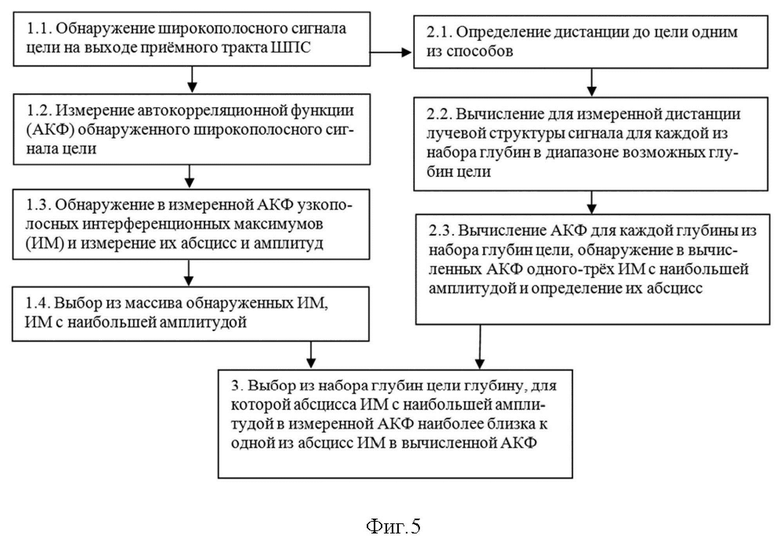
Способ определения глубины морской шумящей цели, включающий обнаружение на выходе шумопеленгаторной станции широкополосного сигнала цели, измерение его автокорреляционной функции (АКФ), обнаружение в измеренной АКФ узкополосных интерференционных максимумов (ИМ), определение абсциссы ИМ с наибольшей амплитудой, отличающийся тем, что определяют дистанцию до цели одним из известных способов, для измеренной дистанции и набора глубин в диапазоне возможных глубин цели с помощью лучевой программы расчёта акустического поля источника рассчитывают лучевую структуру сигнала цели, с использованием которой вычисляют АКФ сигнала источника, в которой обнаруживают один-три ИМ с наибольшей амплитудой, определяют их абсциссы, из набора глубин цели выбирают глубину, для которой абсцисса ИМ с наибольшей амплитудой в измеренной АКФ наиболее близка к одной из абсцисс ИМ в вычисленной АКФ.
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| Лазарев В.А., Орлов Е.Ф., Фокин В.Н., Шаронов Г.А | |||
| Частотная зависимость параметров интерференционной модуляции широкополосного звука в мелком море // Акустический журнал | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| С | |||
| Катодный усилитель с питанием усилительной лампы переменным током | 1923 |
|
SU685A1 |
| Worthmann B.M., Song H.C., Dowling D.R | |||
| High frequency source | |||
