Изобретение относится к измерительной технике и может найти применение в системах позиционирования наземных транспортных средств (ТС), требующих длительного времени автономной работы.
Известная комплексная аппаратура счисления координат [Патент РФ №2545490, 2013, МПК G01C 23/00] представляет собой объединение аппаратуры счисления координат (АСК) и спутниковой навигационной аппаратуры (СНА), в котором СНА калибрует приращения текущих радиальных координат, вырабатываемых АСК, при наличии на выходе СНА сигнала о высоком качестве решения навигационной задачи, а при отсутствии такого сигнала координаты в комплексной аппаратуре счисления координат (КАСК) вырабатываются АСК на основе последних значений калибровочных коэффициентов до появления сигнала о низком качестве решения навигационной задачи. КАСК определяет калибровочные коэффициенты АСК по показаниям СНА на дискретных, расположенных друг за другом участках длиной до 2 км. В этом случае КАСК работает в режиме "Память". Из полученных таким образом приращений комплексных радиальных координат КАСК формирует приращения комплексных плановых (прямоугольных) координат, суммирует их с координатами начальной точки маршрута и получает откорректированные текущие прямоугольные координаты. Эта КАСК принимается за прототип заявляемой навигационной системы наземного транспортного средства.
Недостатком этой аппаратуры является низкая точность определения абсолютных плановых координат из-за определения качества навигационного решения СНА только по количеству видимых спутников, отсутствия возможности использования спутниковой навигационной аппаратуры в режиме Real Time Kinematic, а также из-за наличия постоянного дрейфа углов курсовой системы.
Задачей данного изобретения является устранение указанного недостатка.
Сущность изобретения заключается в том, что в навигационную систему наземного транспортного средства, содержащую путевую систему, курсовую систему, позиционную навигационную аппаратуру в виде СНА, устройство ввода/вывода, вводятся: блок определения навигационных параметров, дополнительная СНА, устройство приема дифференциальных поправок, блок определения угла поворота колес, два датчика расстояний до ступиц колес, расположенных на передней оси транспортного средства (ТС).
Две СНА, расположенные на продольной оси ТС, и устройство приема дифференциальных поправок, реализующее возможность работы СНА в режиме Real Time Kinematic (RTK), обеспечивают повышенную, сантиметровую точность определения координат, а также возможность определения курсового угла ТС.
Блок определения угла поворота колес по данным с двух датчиков расстояний (ДР), закрепленных на передней оси ТС, определяет углы поворота левого и правого колес ТС относительно вертикальной оси ТС, которые используются блоком определения навигационных параметров для коррекции данных получаемых с курсовой и путевой систем с целью уменьшения влияния дрейфа курсового угла ТС.
Все это позволяет повысить точность определения абсолютных плановых координат транспортного средства, при наличии на выходе СНА сигнала о высоком качестве решения навигационной задачи примерно в 10 раз и в противном случае примерно на 30% по сравнению с прототипом.
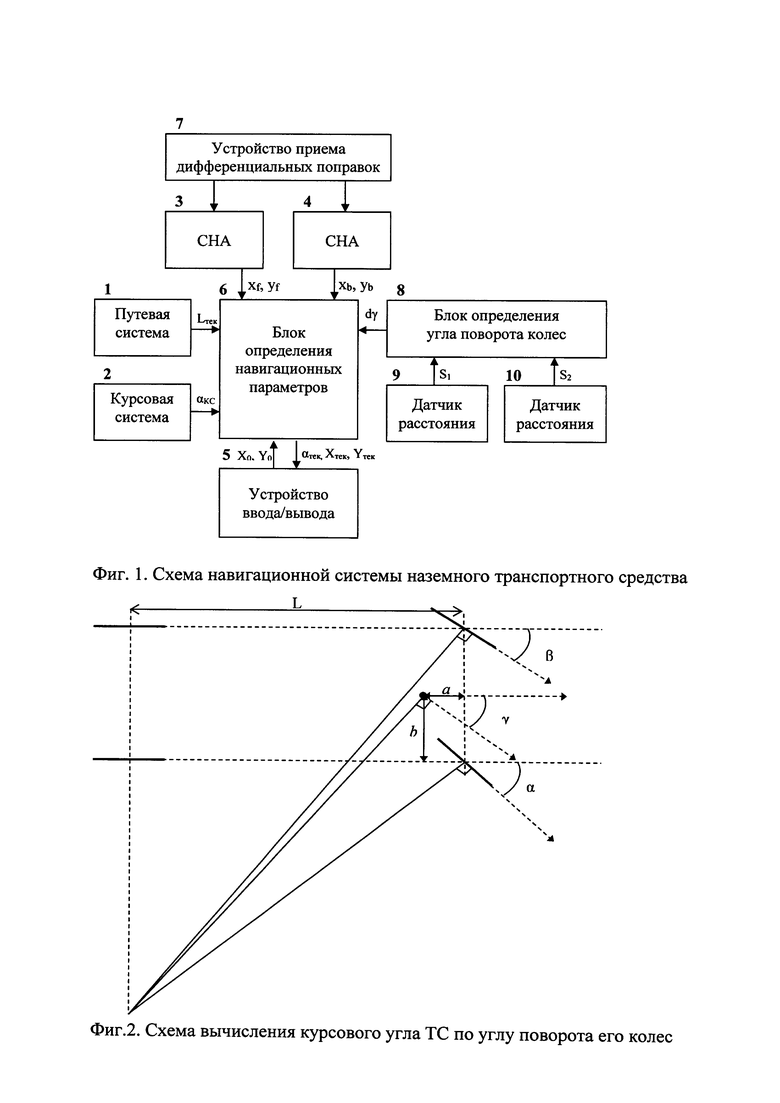
На фиг. 1 представлена схема навигационной системы наземного транспортного средства, реализующей предлагаемый способ.
На фиг. 2 - схема вычисления курсового угла ТС по углу поворота его колес.
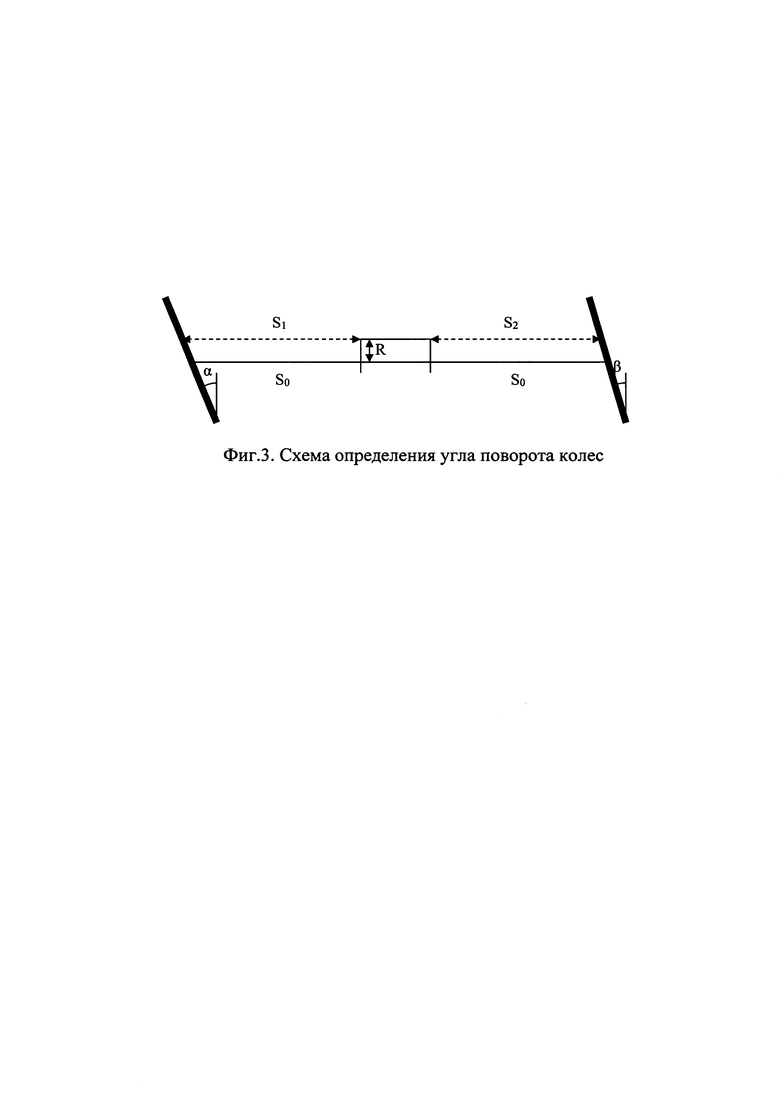
На фиг. 3 - схема определения угла поворота колес.
Навигационная система наземного транспортного средства включает в свой состав путевую систему 1, курсовую систему 2, две спутниковые навигационные аппаратуры (СНА) 3 и 4, устройство ввода/вывода 5, блок определения навигационных параметров (БОНП) 6, устройство приема дифференциальных поправок 7, блок определения угла поворота колес (БОУПК) 8, два датчика расстояний 9 и 10, расположенных на передней оси транспортного средства (ТС), при этом выходы устройства приема дифференциальных поправок 7 соединены с соответствующими входами СНА 3 и 4, выходы датчиков расстояний 9 и 10 соединены со входами БОУПК 8, выходы путевой системы 1, курсовой системы 2, БОУПК 8, устройства ввода/вывода 5, СНА 3 и 4, соединены с соответствующими входами блока БОНП 6, выход БОНП 6 соединен со входом устройства ввода/вывода 5.
Работа системы осуществляется следующим образом. По показаниям СНА 3 и 4, курсовой 2 и путевой 1 систем, а также БОУПК 8 в БОНП 6 определяются координаты и ориентация ТС. Устройство ввода/вывода 5 служит для обеспечения возможности ввода значений начальных координат и ориентации ТС, а также для вывода информации из БОНП.
Начальные координаты и ориентация ТС определяют по показаниям приемников СНА 3 и 4 или указываются оператором при помощи устройства ввода/вывода 5. Дальнейшую навигацию осуществляют в двух режимах, переключающихся автоматически. Первый режим, в котором координаты и ориентацию ТС БОНП 6 определяет по показаниям приемников СНА 3 и 4, действует при наличии на выходе СНА сигнала о высоком качестве решения навигационной задачи, в противном случае действует второй режим работы, при котором координаты и ориентацию ТС БОНП 6 определяет по показаниям курсовой 2 и путевой 1 систем, а также БОУПК 8.
Курсовой угол (γ) в первом режиме определяют по формуле:
где xf, yf, xb, yb - прямоугольные координаты определенных передним и задним датчиком СНА соответственно.
Во втором режиме начальное значение курса ТС (γ0) определяют по последнему значению, полученному при работе в первом режиме. Дальнейшие значения курса получают путем добавления угла изменения курса dγ, который вычисляют путем комплексирования в БОНП 6 значений изменения курса, получаемых с курсовой системы 2 и БОУПК 8. Комплексирование осуществляют любым известным методом (например, фильтром Калмана). Остальные углы ориентации ТС получают с курсовой системы 2. Координаты ТС, в этом режиме, получают по известным формулам на основе скорости перемещения, получаемой с путевой системы 1 и углов ориентации.
Значение угла изменения курса с БОУПК получают по углу поворота колес (см. фиг. 2) по формуле:
где α - угол поворота колеса, dγ - угол поворота оси транспортного средства в точке определения его координат (изменение курса), величины a, b и L указаны на фигуре 2. Углы поворота α левого колеса и β правого колеса определяют при помощи датчиков расстояния 9 и 10 соответственно, закрепленных на оси ТС и измеряющих расстояние от места крепления до ступицы колеса по формулам:
где S - текущее расстояние от датчика до ступицы, S0 - расстояние от датчика до ступицы при отсутствии поворота колеса, R - расстояние от оси левого или правого колеса до точки на ступице, в которой осуществляется измерение.
Пример. Экспериментальная проверка системы была проведена на трассе длиной 5000 м. на автомобиле ГАЗ-3302. В автомобиле размещались два СНА, путевая и курсовая система, а также БОУПК и БОНП. БОУПК реализовывался следующим образом: на передней оси автомобиля были расположены ультразвуковые датчики, позволяющие измерять расстояние до ступицы левого и правого колеса. Эти расстояния передавались в БОНП, где и осуществлялся расчет курсового угла. Проверочная трасса организовывалась таким образом, что на ее отдельных участках отсутствовал сигнал со СНА, что позволило провести проверку системы во всех режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |
| Автоматизированная система навигации с контролем целостности навигационных данных спутниковых радионавигационных систем по информации бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2642151C2 |
| Автоматизированная система навигации с контролем аномальных измерений координат от спутниковых радионавигационных систем | 2022 |
|
RU2783480C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ С КОНТРОЛЕМ ЦЕЛОСТНОСТИ НАВИГАЦИОННЫХ ДАННЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2014 |
|
RU2565834C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2013 |
|
RU2545490C1 |
| Автоматизированная система навигации с контролем целостности навигационных данных спутниковых радионавигационных систем по информации механического и доплеровского датчиков скорости | 2016 |
|
RU2640312C2 |
| Аппаратура наземной навигации | 2018 |
|
RU2708550C1 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С НЕПРЕРЫВНОЙ КАЛИБРОВКОЙ | 2009 |
|
RU2422773C1 |
Изобретение относится к измерительной технике и может найти применение в системах позиционирования наземных транспортных средств. Навигационная система наземного транспортного средства включает в свой состав путевую систему, курсовую систему, две спутниковые навигационные аппаратуры, устройство ввода/вывода, блок определения навигационных параметров, устройство приема дифференциальных поправок, блок определения угла поворота колес, два датчика расстояний, расположенных на передней оси транспортного средства. Выходы устройства приема дифференциальных поправок соединены с соответствующими входами спутниковых навигационных аппаратур, выходы датчиков расстояний соединены со входами блока определения угла поворота колес, выход путевой системы, курсовой системы, блока определения угла поворота колес, устройства ввода/вывода, спутниковых навигационных аппаратур соединены с соответствующими входами блока определения навигационных параметров, выход блока определения навигационных параметров соединен со входом устройства ввода/вывода. Техническим результатом изобретения является повышение точности вычисления абсолютных плановых координат наземного транспортного средства. 3 ил.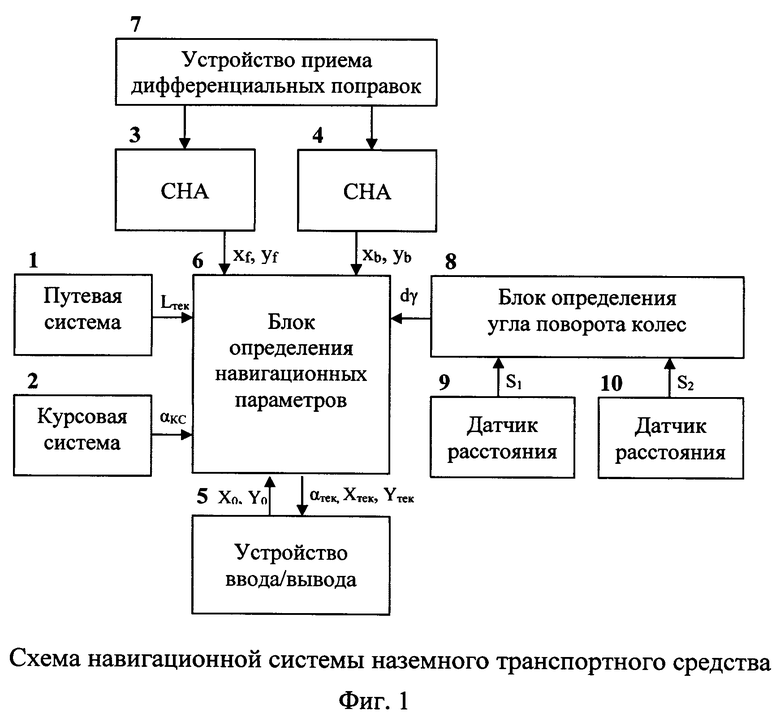
Навигационная система наземного транспортного средства, содержащая путевую систему, курсовую систему, позиционную навигационную аппаратуру в виде спутниковой навигационной аппаратуры, устройство ввода/вывода, отличающаяся тем, что в нее введены блок определения навигационных параметров, дополнительная спутниковая навигационная аппаратура, устройство приема дифференциальных поправок, блок определения угла поворота колес, два датчика расстояний до ступиц колес, расположенных на передней оси транспортного средства, при этом выходы устройства приема дифференциальных поправок соединены с соответствующими входами спутниковых навигационных аппаратур, выходы датчиков расстояний соединены со входами блока определения угла поворота колес, выходы путевой системы, курсовой системы, блока определения угла поворота колес, устройства ввода/вывода, спутниковых навигационных аппаратур соединены с соответствующими входами блока определения навигационных параметров, выход блока определения навигационных параметров соединен со входом устройства ввода/вывода.
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2013 |
|
RU2545490C1 |
| Машина для испытания рельсов и стыковых рельсовых накладок на износ и усталостную прочность | 1952 |
|
SU100232A1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ПО ДВУМ СОСТАВЛЯЮЩИМ СКОРОСТИ | 2000 |
|
RU2184348C2 |
| US 9002565 B2, 07.04.2015. | |||

