Предлагаемое изобретение относится к области навигации наземных транспортных средств (НТС) и представляет собой комплексную спутниковую навигационную аппаратуру.
Аналогами заявляемой аппаратуры являются различные варианты одометрической навигационной аппаратуры, в состав которой входят путевая и курсовая системы, которые определяют приращение координат, и сумматор приращения координат с координатами начальной точки маршрута.
В качестве прототипа выбрана комплексная аппаратура счисления координат (КАСК) по патенту РФ 2195632.
КАСК представляет собой подкалибровываемую по показаниям навигационной аппаратуры потребителей спутниковой навигационной системы (НАЛ СНС) одометрическую навигационную аппаратуру (ОНА), которая по сигналу о низком качестве показаний, вырабатываемому НАЛ СНС, переходит в режим памяти - в режим работы от свежеоткалиброванной ОНА.
Недостатком КАСК является ее относительно высокая сложность конструкции, т.к. в состав ОНА входит гироскопическая курсовая система.
Изобретение имеет своей целью упрощение конструкции навигационной аппаратуры за счет исключения из ее состава гироскопической курсовой системы.
Сущность изобретения основана на возможности определения в движении по показаниям НАЛ СНС дирекционного угла НТС, а по показаниям двух датчиков скорости - приращений дирекционного угла НТС и заключается в том, что в комплексную спутниковую навигационную аппаратуру, включающую в свой состав первый и второй вычислители приращений координат, первый и второй преобразователи плановых приращений координат в радиальные, первый и второй блоки ввода поправки или коррекции, первый и второй блоки сравнения параметров, первый и второй фильтры, преобразователь приращений радиальных координат в плановые, сумматор, блок ввода начальных координат, блок режима начальной установки и навигационную аппаратуру потребителя спутниковой навигационной системы, причем первый и второй выходы навигационной аппаратуры потребителя спутниковой навигационной системы соединены с соответствующими входами второго вычислителя приращений координат и блока ввода начальных координат, выходы первого и второго вычислителей приращений координат соединены с соответствующими входами первого и второго преобразователя приращений плановых координат в радиальные, выходы первого преобразователя плановых координат в радиальные соединены с первыми входами первого и второго блоков поправки или коррекции и блоков сравнения параметров, выходы второго преобразователя плановых координат в радиальные соединены со вторыми входами первого и второго блоков сравнения параметров, выходы первого и второго блоков сравнения параметров соединены с входами первого и второго фильтров соответственно, а третьи входы - с третьим выходом навигационной аппаратуры потребителя спутниковой навигационной системы, выходы которых соединены со вторыми входами первого и второго блоков введения поправки или коррекции соответственно, выходы которых соединены с соответствующими входами преобразователя приращений радиальных координат в плановые, выходы преобразователя приращений радиальных координат в плановые соединены с соответствующими входами сумматора, управляющий вход блока ввода начальных координат соединен с первым выходом блока режима начальной установки, второй выход которого соединен со входами обнуления первого и второго вычислителя приращений координат, выходы блока ввода начальных координат соединены с соответствующими входами второго вычислителя приращений координат и сумматора, выходы которого являются выходами комплексной спутниковой навигационной аппаратуры, введены первый и второй датчики скорости, первый и второй узлы калибровки, первый и второй корректоры, формирователь приращений дирекционного угла, формирователь текущего дирекционного угла и хранитель начального дирекционного угла, при этом выходы первого и второго датчиков скорости соединены с входами первого и второго узлов калибровки соответственно, выходы которых соединены с первыми входами первого и второго корректоров соответственно, выход первого корректора соединен с первыми входами первого вычислителя приращений координат и формирователя приращений дирекционного угла, выход второго корректора соединен со вторым входом формирователя приращений дирекционного угла, выход которого соединен с первым входом формирователя текущего дирекционного угла, второй вход которого соединен с выходом хранителя начального дирекционного угла, а выход - со вторым входом первого вычислителя приращений координат, а вторые входы первого и второго корректоров соединены с выходом первого фильтра.
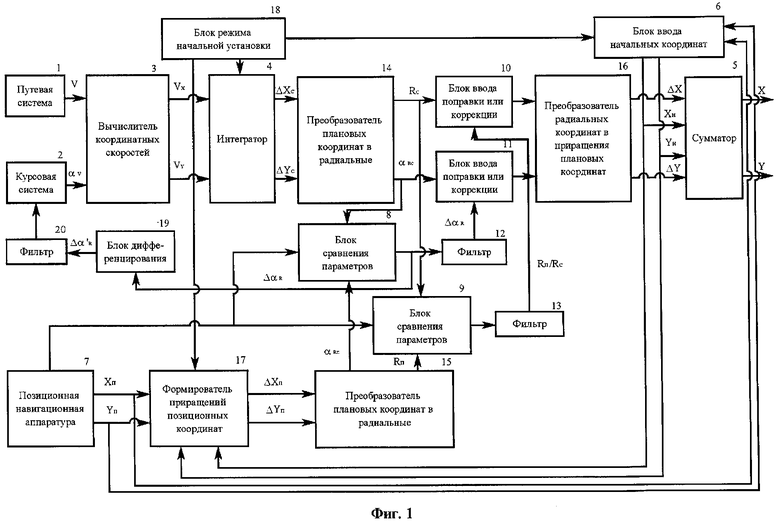
Сущность изобретения поясняется графическими материалами, где на фиг.1 приведена блок-схема устройства-прототипа (КАСК), а на фиг.2 - блок-схема заявленной комплексной спутниковой навигационной аппаратуры (КСНА).
В комплексную спутниковую навигационную аппаратуру, включающую в свой состав первый и второй вычислитель приращений координат 1, 2, первый и второй преобразователь плановых приращений координат в радиальные 3, 4, первый и второй блоки ввода поправки или коррекции 5, 6, первый и второй блоки сравнения параметров 7, 8, первый и второй фильтры 9, 10, преобразователь приращений радиальных координат в плановые 11, сумматор 12, блок ввода начальных координат 13, блок режима начальной установки 14 и навигационную аппаратуру потребителя спутниковой навигационной системы 15, причем первый и второй выходы навигационной аппаратуры потребителя спутниковой навигационной системы 15 соединены с соответствующими входами второго вычислителя приращений координат 2 и блока ввода начальных координат 13, выходы первого и второго вычислителей приращений координат 1, 2 соединены с соответствующими входами первого и второго преобразователя приращений плановых координат в радиальные 3, 4, выходы первого преобразователя плановых координат в радиальные 3 соединены с первыми входами первого и второго блоков поправки или коррекции 5, 6 и блоков сравнения параметров 7, 8, выходы второго преобразователя плановых координат в радиальные 4 соединены со вторыми входами первого и второго блоков сравнения параметров 7, 8, выходы первого и второго блоков сравнения параметров 7, 8 соединены с входами первого и второго фильтров 9, 10 соответственно, а третьи входы - с третьим выходом навигационной аппаратуры потребителя спутниковой навигационной системы 15, выходы первого и второго фильтров 9, 10 соединены со вторыми входами первого и второго блоков введения поправки или коррекции 5, 6 соответственно, выходы которых соединены с соответствующими входами преобразователя приращений радиальных координат в плановые 11, выходы преобразователя приращений радиальных координат в плановые 11 соединены с соответствующими входами сумматора 12, третий вход блока ввода начальных координат 13 соединен с первым выходом блока режима начальной установки 14, второй выход которого соединен со входами обнуления первого и второго вычислителя приращений координат 1, 2, выходы блока ввода начальных координат 13 соединены с соответствующими входами второго вычислителя приращений координат 2 и сумматора 12, выходы которого являются выходами комплексной спутниковой навигационной аппаратуры, для упрощения конструкции навигационной аппаратуры введены первый и второй датчики скорости 16, 17, первый и второй узлы калибровки 18, 19, первый и второй корректоры 20, 21, формирователь приращений дирекционного угла 22, формирователь текущего дирекционного угла 23 и хранитель начального дирекционного угла 24, при этом выходы первого и второго датчиков скорости 16, 17 соединены с входами первого и второго узлов калибровки 18, 19 соответственно, выходы которых соединены с первыми входами первого и второго корректоров 20, 21 соответственно, выход первого корректора 20 соединен с первыми входами первого вычислителя приращений координат 1 и формирователя приращений дирекционного угла 22, выход второго корректора 21 соединен со вторым входом формирователя приращений дирекционного угла 22, выход которого соединен с первым входом формирователя текущего дирекционного угла 23, второй вход которого соединен с выходом хранителя начального дирекционного угла 24, а выход - со вторым входом первого вычислителя приращений координат 1, а вторые входы первого и второго корректоров 20, 21 соединены с выходом первого фильтра 9.
Работа комплексной спутниковой навигационной аппаратуры происходит в следующем порядке.
После подачи питания на КСНА в ней начинают вырабатываться координаты текущего места НТС с помощью НАП СНС, одновременно начинают вырабатываться грубые приращения координат по квазиодометрическому каналу (КОК), которые подкалибровываются по результатам сравнения модулей радиус-векторов и дирекционных углов радиус-векторов от КОК и от НАП СНС.
Выходные сигналы преобразователя радиальных координат в приращение плановых координат 11 имеют вид: ΔX=R·cosαR, ΔY=R·sinαR.
Выходные сигналы блоков ввода поправки и коррекции 5 и 6 имеют вид:
R=RКОК·k, α=αRKOK+Δα.
Выходные сигналы блоков сравнения параметров 7 и 8 имеют вид:

Выходные сигналы преобразователей плановых координат в радиальные 3, 4 имеют вид: 

При высоком уровне показателя качества НАП СНС работа КСНА идет в нормальном режиме.
При низком уровне показателя качества блоки сравнения параметров 7, 8 блокируются и в блоках ввода поправок и коррекции 5, 6 остаются последние значения k и Δα. С этого момента выходные координаты измеряются КОК (свежеоткалиброванным). Поскольку в КОК используется неправильное значение начального дирекционного угла (конструктивного, т.е. постоянного произвольной величины, схемно сформированного в хранителе начального дирекционного угла 24), то поправка к нему устраняет влияние его неправильности.
Для измерения приращений дирекционного угла используем тот факт, что при движении по криволинейному участку каждая точка НТС движется по своей траектории, сохраняя определенную угловую скорость вращения НТС:

где RЦВ - радиус кривизны трассы для центра вращения НТС,
ΔRДС, lДС - отстояние датчиков скорости от ЦВ вдоль и поперек RЦВ,
RТР - радиус кривизны траектории точки НТС.
Разница показаний двух датчиков скорости 16, 17, установленных в разных точках НТС равна:
 . Отсюда можно получить выражение:
. Отсюда можно получить выражение:

В качестве датчиков скорости 16, 17 можно использовать механические датчики скорости для левых и правых колес или доплеровские датчики продольной скорости, расположенные на левом и правом борту НТС.
Узлы калибровки 16, 17 представляют собой делители частоты, коэффициент деления которых определяется и устанавливается при калибровке.
Корректоры 20, 21 тоже могут представлять собой делители частоты, коэффициент деления которых определяется блоком сравнения параметров 7.
Формирователь приращений дирекционного угла 22 легко реализуется как вычислитель, дискретно вычисляющий разницу показаний датчиков скорости 16, 17 и определяющий по ней приращения дирекционного угла (Δα).
Формирователь текущего дирекционного угла 23 представляет собой схему сложения Δα и αK, причем величина αK может быть любой, но постоянной.
В номинальном режиме НАП СНС подкалибровывает показания КОК, поэтому при переходе в режим работы по памяти (показатель качества мал) КСНА продолжает определять приращения координат и складывать их с координатами начальной точки маршрута.
В качестве последних оператор с помощью блока режима начальной установки 13 использует взятые из каталога координаты или координаты, определенные НАП СНС (в зависимости от условий работы).
Заявленное устройство при своей реализации не требует использования новых узлов, сам принцип определения приращения текущего азимута по поворотам транспортного средства тоже известен и используется для определения поправок к координатам на поворотах в [2].
Экспериментальные испытания подтвердили работоспособность заявляемой КСНА.
Источники информации
1. Патент РФ №2195632. МПК7 G 01 C 23/00.
2. Патент РФ №2173834. МПК7 G 01 C 21/12.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| Аппаратура наземной навигации | 2018 |
|
RU2708550C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2013 |
|
RU2545490C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
| Аппаратура наземной навигации | 2024 |
|
RU2840479C1 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| Автоматизированная система навигации с контролем целостности навигационных данных спутниковых радионавигационных систем по информации бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2642151C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОКАЗАНИЙ | 2000 |
|
RU2184349C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С НЕПРЕРЫВНОЙ КАЛИБРОВКОЙ | 2009 |
|
RU2422773C1 |
Изобретение относится к области приборостроения и может найти применение в системах навигации наземных транспортных средств. Технический результат - снижение массогабаритных характеристик. Для достижения данного результата предлагаемая аппаратная реализация обеспечивает совмещение принципа комплексирования аппаратуры счисления координат транспортного средства и спутниковой навигационной аппаратуры, реализованной без использования гироскопической аппаратуры определения направления оси транспортного средства в геодезической системе координат. 2 ил.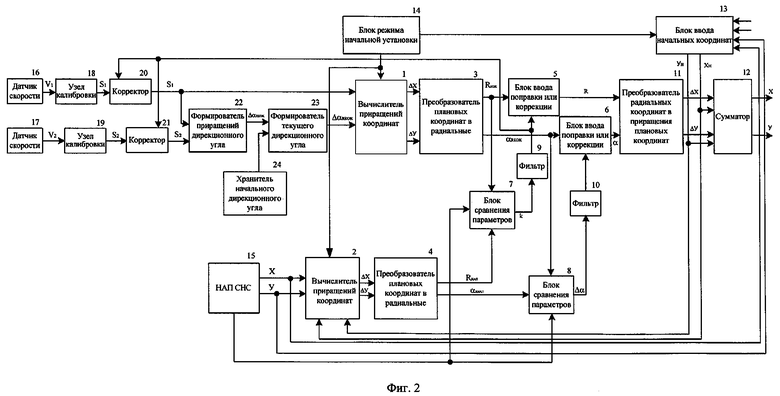
Комплексная спутниковая навигационная аппаратура, включающая в свой состав первый и второй вычислитель приращений координат, первый и второй преобразователь плановых приращений координат в радиальные, первый и второй блоки ввода поправки или коррекции, первый и второй блоки сравнения параметров, первый и второй фильтры, преобразователь приращений радиальных координат в плановые, сумматор, блок ввода начальных координат, блок режима начальной установки и навигационную аппаратуру потребителя спутниковой навигационной системы, причем первый и второй выходы навигационной аппаратуры потребителя спутниковой навигационной системы соединены с соответствующими входами второго вычислителя приращений координат и блока ввода начальных координат, выходы первого и второго вычислителей приращений координат соединены с соответствующими входами первого и второго преобразователя приращений плановых координат в радиальные, выходы первого преобразователя плановых координат в радиальные соединены с первыми входами первого и второго блоков поправки или коррекции и блоков сравнения параметров, выходы второго преобразователя плановых координат в радиальные соединены со вторыми входами первого и второго блоков сравнения параметров, выходы первого и второго блоков сравнения параметров соединены с входами первого и второго фильтров соответственно, а третьи входы - с третьим выходом навигационной аппаратуры потребителя спутниковой навигационной системы, выходы первого и второго фильтров соединены со вторыми входами первого и второго блоков введения поправки или коррекции соответственно, выходы которых соединены с соответствующими входами преобразователя приращений радиальных координат в плановые, выходы преобразователя приращений радиальных координат в плановые соединены с соответствующими входами сумматора, третий вход блока ввода начальных координат соединен с первым выходом блока режима начальной установки, второй выход которого соединен со входами обнуления первого и второго вычислителей приращений координат, выходы блока ввода начальных координат соединены с соответствующими входами второго вычислителя приращений координат и сумматора, выходы которого являются выходами комплексной спутниковой навигационной аппаратуры, отличающаяся тем, что в нее введены первый и второй датчики скорости, первый и второй узлы калибровки, первый и второй корректоры, формирователь приращений дирекционного угла, формирователь текущего дирекционного угла и хранитель начального дирекционного угла, при этом выходы первого и второго датчиков скорости соединены с входами первого и второго узлов калибровки соответственно, выходы которых соединены с первыми входами первого и второго корректоров соответственно, выход первого корректора соединен с первыми входами первого вычислителя приращений координат и формирователя приращений дирекционного угла, выход второго корректора соединен со вторым входом формирователя приращений дирекционного угла, выход которого соединен с первым входом формирователя текущего дирекционного угла, второй вход которого соединен с выходом хранителя начального дирекционного угла, а выход - со вторым входом первого вычислителя приращений координат, а вторые входы первого и второго корректоров соединены с выходом первого фильтра.
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
| US 3630079 А, 28.12.1971 | |||
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| DE 3033279 A1, 04.08.1982. | |||

