Изобретение относится к области навигации наземных транспортных средств (НТС).
Общей особенностью АСК на самолетах и кораблях является требование учета "сноса" транспортного средства из-за увлечения их воздушной и водной средой. Однако такая же необходимость стоит и перед АСК сухопутного транспортного средства. При этом под "сносом" сухопутного транспортного средства понимается как поперечный "снос" машины на наклонной дороге, так и разворот машины на подвеске.
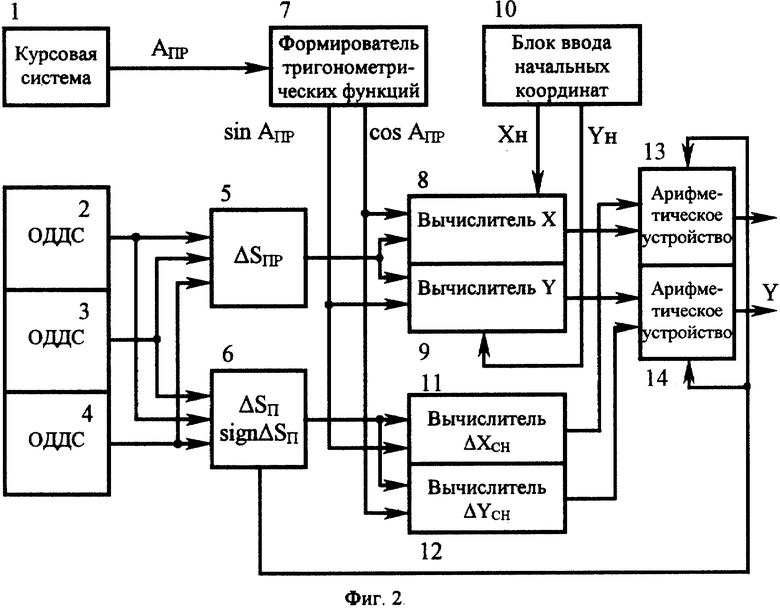
Известно множество вариантов технической реализации аппаратуры счисления координат (АСК) на плавающих, летательных и НТС. Ранние АСК не учитывали бокового "сноса", более поздние учитывали "снос" и обеспечивали большую точность определения координат. Известная АСК с учетом "сноса", которая взята за прототип, описана в [1 - с. 100, 288, 2 - с. 323]. Ее структурная схема представлена на фиг.1.
АСК-прототип состоит из курсовой системы (КС1), вырабатывающей угол положения оси транспортного средства в ГСК (αКС), трехлучевого доплеровского датчика скорости (ДДС2), блока выработки приращения пути в продольном (вдоль оси НТС) направлении (ΔSпр) 3, блока выработки приращения пути в поперечном направлении и его знака (ΔSп и signΔSп) 4, блока выработки угла "сноса" 5, блока введения поправки в показания КС6, формирователя тригонометрических функций 7, формирователя приращения пути  двух одинаковых навигационных вычислителей Х и Y 9 и 10 и блока ввода начальных координат 11, при этом выход курсовой системы 1 соединен с входом с блока ввода поправки (на "снос") 6, выход которого соединен с входом формирователя триглномнтрических функций 7, а другие входы соединены с выходом блока вычисления угла "сноса" 5 и выходом блока формирования приращения пути в поперечном направлении 4 по знаку соответственно, выходы блоков 3 и 4 соединены с входами блока 5 и с входами формирователя приращения пути
двух одинаковых навигационных вычислителей Х и Y 9 и 10 и блока ввода начальных координат 11, при этом выход курсовой системы 1 соединен с входом с блока ввода поправки (на "снос") 6, выход которого соединен с входом формирователя триглномнтрических функций 7, а другие входы соединены с выходом блока вычисления угла "сноса" 5 и выходом блока формирования приращения пути в поперечном направлении 4 по знаку соответственно, выходы блоков 3 и 4 соединены с входами блока 5 и с входами формирователя приращения пути  а выход последнего соединен с первыми входами навигационных вычислителей 9 и 10; ДДС2 состоит из трех однолучевых ДДС (ОДДС1-2, ОДДС2-2, ОДДС3-2), направления излучения которых относительно осей Х и Y системы координат, связанной с НТС, задаются следующими углами: α1,β1- для ОДДС1-2, (180°-α1),β1- для ОДДС2-2, α1,(180°-β1) - для ОДДС3, выходы которых соединены с соответствующими входами блока выработки ΔSпр 3 и с соответствующими входами блока выработки ΔSп и signΔSп 4, вторые входы НВ9 и НВ10 соединены с выходами формирователя тригонометрических функций 7 по cosαV и sinαV соответственно, выходы блока ввода начальных координат 11 соединены с дополнительными входами навигационных вычислителей 9 и 10 соответственно, а выходы навигационных вычислителей 9 и 10 являются выходами аппаратуры по координатам Х и Y.
а выход последнего соединен с первыми входами навигационных вычислителей 9 и 10; ДДС2 состоит из трех однолучевых ДДС (ОДДС1-2, ОДДС2-2, ОДДС3-2), направления излучения которых относительно осей Х и Y системы координат, связанной с НТС, задаются следующими углами: α1,β1- для ОДДС1-2, (180°-α1),β1- для ОДДС2-2, α1,(180°-β1) - для ОДДС3, выходы которых соединены с соответствующими входами блока выработки ΔSпр 3 и с соответствующими входами блока выработки ΔSп и signΔSп 4, вторые входы НВ9 и НВ10 соединены с выходами формирователя тригонометрических функций 7 по cosαV и sinαV соответственно, выходы блока ввода начальных координат 11 соединены с дополнительными входами навигационных вычислителей 9 и 10 соответственно, а выходы навигационных вычислителей 9 и 10 являются выходами аппаратуры по координатам Х и Y.
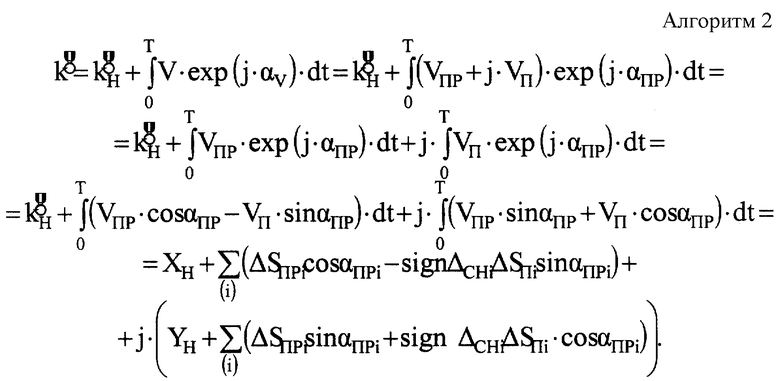
Данная АСК реализует алгоритм определения координат движущейся точки, приведенной в конце описания
Здесь: V - модуль скорости движения;
αV = αКС+ ΔαCH- направление (угол) вектора скорости в геодезической системе координат;
αКС- показания КС;
ΔαCH- угол "сноса", измеряемый по показаниям ДДС;
ХH, YH - координаты начальной точки маршрута движения.
При этом из сигналов трехлучевого ОДДС вырабатываются сигналы о VПР, Vпоп, ΔαCH,  αV = αКС+ ΔαCH. Вычисление текущих координат проводится с использованием начальных координат, V и αV.
αV = αКС+ ΔαCH. Вычисление текущих координат проводится с использованием начальных координат, V и αV.
Работает АСК - прототип следующим образом.
Во время стоянки наземного транспортного средства курсовая система определяет начальное положение в геодезической системе координат его продольной оси и продолжает определять его в процессе движения. На выходах ДДС появляются сигналы (импульсные) с частотами, равными доплеровским сдвигам для направлений их излучения:
Здесь: ∠(V∧Ri) - угол между вектором скорости и осью диаграммы направленности i-го однолучевого ДДС;
λ - длина волны излучаемого сигнала;
VX, VY, VZ - проекции вектора скорости на оси системы координат, связанной с НТС следующим образом:
ось Х - продольная ось НТС;
ось Y - направлена вправо;
ось Z - направлена вниз (правосторонняя система).
С учетом того, что тригонометрические функции периодичны, ОДДСы вырабатывают модуль частоты, и что VX>>VY, VZ, формулы можно привести к виду:


Отсюда для частот сигналов на выходе блоков 3 и 4 получим:
т. е. сигнал о VX формируют ОДДС1-2 и ОДДС2-2, а о VY - ОДДС1-2 и ОДДС3-2.
Число импульсов за такт опроса равно соответственно
откуда

Знак ΔSП определяется по знаку разности ΔS1-ΔS3, ΔПР и ΔП определяются при калибровке, величина угла "сноса" на выходе блока 5 равна:  а значение угла направления скорости (непродольной оси машины) αV = αKC+ΔαCH. Из αV и
а значение угла направления скорости (непродольной оси машины) αV = αKC+ΔαCH. Из αV и  навигационные вычислители 9 и 10 с использованием сигналов блока ввода начальных координат 11 получают координаты:
навигационные вычислители 9 и 10 с использованием сигналов блока ввода начальных координат 11 получают координаты:
и
Недостатком данной АСК является появление изменений счисляемых координат при изменении скорости движения.
Дело в том, что сигналы о Vпр и Vп и, соответственно, ΔSПР и ΔSп содержат большую короткопериодную (быстрофлуктуирующую) погрешность, обусловленную явлениями биений в сигналах ДДС из-за конечной ширины их спектров. При проведении вычислений на ЭВМ обрабатываются приращения путей (ΔSпР и ΔSп) за такт обмена (Т), а это означает, что величина  зависит от скорости движения, соответственно от скорости движения зависят и координаты. Диапазон этой зависимости достигает (0,1-0,2)% в зависимости от ширины диаграммы направленности антенны ДДС.
зависит от скорости движения, соответственно от скорости движения зависят и координаты. Диапазон этой зависимости достигает (0,1-0,2)% в зависимости от ширины диаграммы направленности антенны ДДС.
Предлагаемое изобретение направлено на устранение зависимости показаний АСК от скорости движения.
Сущность предлагаемого изобретения заключается в том, что вместо счисления координат по модулю полной скорости и ее направлению, задаваемому как сумма показаний курсовой системы и угла "сноса", определяемого по показаниям однолучевых ДДС, применено счисление приращения координат от продольной и поперечной составляющей полной скорости с последующим суммированием их и начальных координат.
Для этого в АСК состоящую из курсовой системы, трех однолучевых ДДС, блоков выработки приращений пути в продольном и поперечном направлениях, формирователя тригонометрических функций, двух вычислителей и блока ввода начальных координат, при этом выход курсовой системы соединен с входом формирователя тригонометрических функций, выход которого по cosαПР и sinαПР соединены с первыми входами вычислителей соответственно, выход доплеровских датчиков скорости соединены с соответствующими входами блоков выработки приращений пути в продольном и поперечном направлениях (от продольного и поперечного движения) соответственно, выход первого из них соединен с вторыми входами вычислителей соответственно, на третьи входы которых подаются величины координат начальной точки маршрута из блока ввода начальных координат, а для увеличения точности счисления координат в нее введены два вычислителя приращенной координат от поперечной скорости (от движения в поперечном направлении) и два арифметических устройства, при этом первые входы введенных вычислителей соединены с выходом по пути блока выработки приращений пути в поперечном направлении (от поперечного движения), вторые входы соединены с выходами формирователя тригонометрических функций по αПР и αПР = соответственно, а выходы - с первыми входами соответствующих арифметических устройств, вторые входы которых соединены с выходами вычислителей соответственно, а третьи входы (управляющие) соединены с выходом по знаку "сноса" блока выработки приращений пути в поперечном направлении, а выходы являются выходами аппаратуры счисления координат.
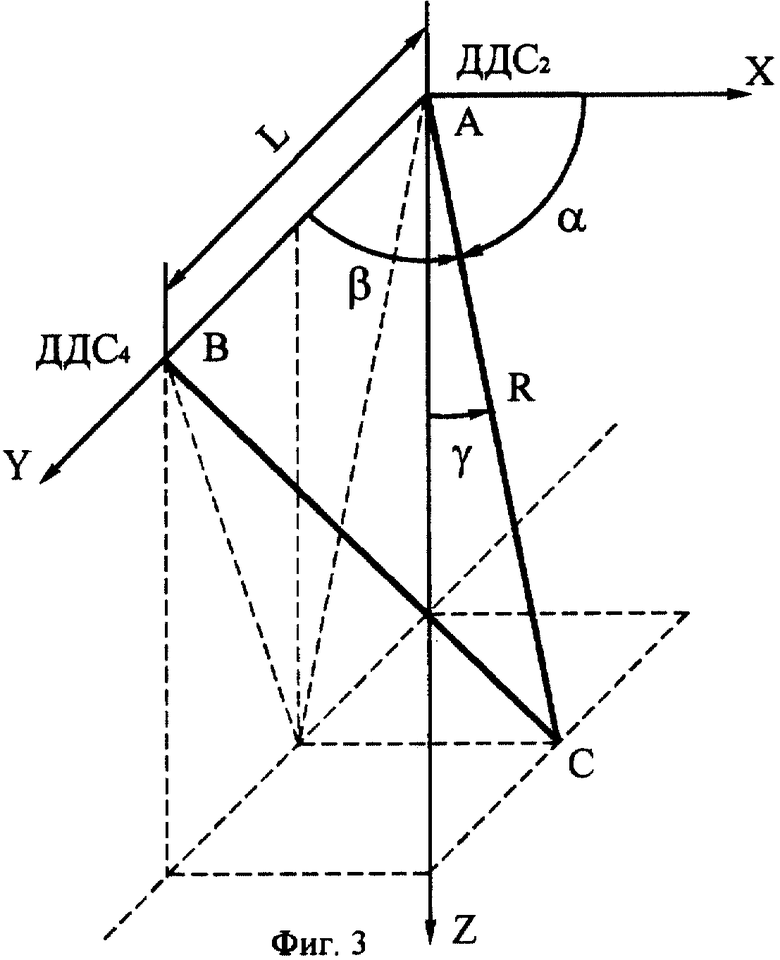
Сущность изобретения поясняется чертежами, где на фиг.1 изображена блочная схема АСК-прототипа, на фиг.2 - блочная схема заявляемой АСК, а на фиг.3 приведен чертеж, поясняющий образование формулы разнесения ДДС на бампере для обеспечения "засветки" одного участка поверхности земли.
Предлагаемое изобретение (см. фиг.2), представляющее собой АСК с учетом "сноса", на показания которой не оказывают влияние изменения скорости движения НТС, содержит курсовую систему 1, три однолучевых доплеровских датчика скорости 2, 3, 4, блоки выработки приращений пути в продольном и поперечном направлениях 5, 6, формирователь тригонометрических функций 7, вычислители 8, 9 и блок ввода начальных координат 10, при этом выход курсовой системы 1 соединен с входом формирователя тригонометрических функций 7, выходы которого по αПР и αПР соединены с первыми входами вычислителей 8,9 соответственно, выходы однолучевых доплеровских датчиков скорости 2,3,4 соединены с соответствующими входами блоков выработки приращения пути в продольном и поперечном направлениях 5,6, выход первого из них соединен с вторыми входами вычислителей 8,9, на третьи входы которых подаются величины координат начальной точки движения из блока ввода начальных координат 10; а для увеличения точности счисления координат в нее введены два вычислителя приращений координат от поперечной скорости 11, 12 и два арифметических устройства 13, 14, при. этом первые входы введенных вычислителей приращений координат от поперечной скорости 11, 12 соединены с выходом по пути блока выработки приращения пути в поперечном направлении 6, вторые входы соединены с выходами формирователя тригонометрических функций 7 по αПР и αПР соответственно, а выходы - с первыми входами соответствующих арифметических устройств 13, 14, вторые входы которых соединены с выходами соответствующих вычислителей 8,9, третьи (управляющие) входы соединены с выходом по знаку "сноса" блока выработки приращения пути в поперечном направлении 6, а выходы являются выходами аппаратуры счисления координат.
Работает данная АСК следующим образом.
Во время стоянки на начальной точке маршрута с помощью курсовой системы определяется начальное направление продольной оси машины в геодезической системе координат. После начала движения к этому значению добавляются приращения (изменения) углового положения оси и, таким образом, формируют текущее значение угла направления продольной оси машины (αПР).
Одновременно однолучевые доплеровские датчики скорости 2,3,4 и блоки выработки приращения пути в продольном и поперечном направлениях 5,6 посылают свои сигналы на вычислители 8,9 и вычислители приращений координат от движения в поперечном направлении 11,12, на другие входы которых поступают значения cosαПР и sinαПР, которые выработаны формирователем тригонометрических функций 7 из сигнала курсовой системы 1. Вычислители 8,9 из этих сигналов совместно со значениями начальных координат, поступающих из блока ввода начальных координат 10, вырабатывают координаты машины, как если бы машина имела только продольную скорость по правилу:
и 
Вычислители приращений координат в поперечном направлении ΔXCH и ΔYCH11,12 вырабатывают величины приращений по правилу:

Полученные величины с выходов вычислителей 8,9 и вычислителей приращений координат от движения в поперечном направлении 11,12 поступают после i-го цикла вычислений в арифметические устройства 13,14, где по сигналу о знаке "сноса", поступающему со второго выхода блока выработки приращения пути в поперечном направлении 6, они суммируются и формируют выходные значения координат.
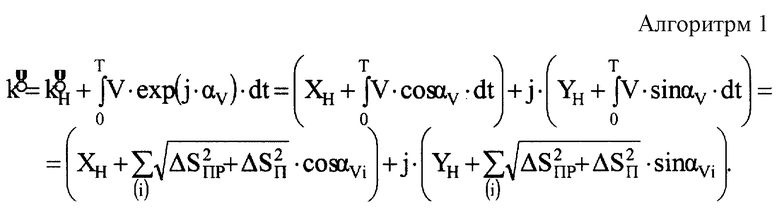
Алгоритм работы заявляемой АСК имеет вид, приведенный в конце описания.
Отсюда видно, что при использовании двухканального определения приращений координат (от продольной и сносовой скоростей) с последующим их суммированием исчезает необходимость квадрирования результатов накопления за такт опроса или интегралов за такт опроса от сильно флуктуирующих показаний ДДС, что устраняет зависимость показаний от скорости.
АСК представляет собой по сути устройство, вычисляющее текущие координаты по сигналам датчиков и заданному алгоритму работы, и может быть реализовано с использованием стандартных компонентов ЭВМ, соответствующей доработки алгоритма и программы работы АСК.
Проведенные испытания АСК показали;
- АСК-прототип действительно имеет скоростную зависимость показаний;
- заявляемая АСК не имеет зависимости показаний от скорости движения и учет угла "сноса" проводится с точностью до 0,1÷0,2 мрад на S=30 км;
- оставшаяся поперечная погрешность целиком определяется погрешностью определения начального угла движения и "уходами" гироскопических приборов при движении.
Библиографические данные:
1. Колчинский В. Е. , Мандуровский И.А., Константиновский М.И.. Доплеровские устройства и системы навигации - М.: "Советское радио", 1975.
2. Селезнев В.П. "Навигационные устройства", М., Машиностроение, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОКАЗАНИЙ | 2000 |
|
RU2184349C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| КОМПЛЕКСИРОВАННЫЙ ДОПЛЕРОВСКИЙ МОДУЛЬ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2213981C2 |
| ДОПЛЕРОВСКИЙ ДАТЧИК ПРИРАЩЕНИЙ ПУТИ С УСТРОЙСТВОМ СТЕНДОВОЙ КАЛИБРОВКИ | 2003 |
|
RU2246737C1 |
| КОМПЛЕКСИРОВАННЫЙ ДОПЛЕРОВСКИЙ МОДУЛЬ | 2001 |
|
RU2212686C2 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С НЕПРЕРЫВНОЙ КАЛИБРОВКОЙ | 2009 |
|
RU2422773C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2013 |
|
RU2545490C1 |
Изобретение относится к области навигации наземных транспортных средств. Технический результат - повышение точности за счет устранения зависимости показаний от скорости движения. Аппаратура состоит из курсовой системы, трех однолучевых датчиков скорости, блоков выработки приращений пути в двух направлениях, формирователя тригонометрических функций, двух вычислителей. Аппаратура дополнительно содержит два вычислителя приращений координат от поперечной скорости и два арифметических устройства. 3 ил.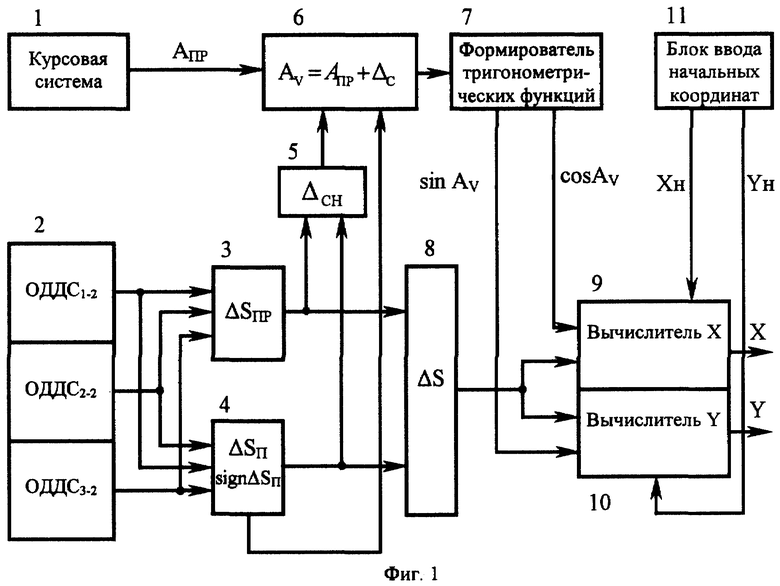
Аппаратура счисления координат по двум составляющим скорости, состоящая из курсовой системы, трех однолучевых доплеровских датчиков скорости, блоков выработки приращения пути в продольном и поперечном направлениях, формирователя тригонометрических функций, двух вычислителей и блока ввода начальных координат, причем выход курсовой системы соединен со входом формирователя тригонометрических функций, выходы которого по косинусу и синусу угла продольного направления соединены с первыми входами вычислителей соответственно, выходы доплеровских датчиков скорости соединены с соответствующими входами блоков выработки приращения пути в продольном и поперечном направлениях соответственно, выход первого из них соединен со вторыми входами вычислителей, на третьи входы которых подаются величины координат начальной точки маршрута из блока ввода начальных координат, отличающаяся тем, что в нее введены два вычислителя приращений координат от поперечной скорости и два арифметических устройства, причем первые входы вычислителей приращений координат соединены с выходом по пути блока выработки приращений пути в поперечном направлении, вторые входы соединены с выходами формирователя тригонометрических функций по синусу и косинусу угла продольного направления соответственно, а выходы соединены с первыми входами соответствующих арифметических устройств, вторые входы которых соединены с выходами соответствующих вычислителей, третьи (управляющие) входы соединены с выходом по знаку "сноса" блока выработки приращения пути в поперечном направлении, а выходы являются выходами аппаратуры счисления координат.
| Навигационный счислитель координат | 1989 |
|
SU1820218A1 |
| DE 3033279 А1, 11.11.1982 | |||
| RU 96119778 А1, 20.12.1998. | |||

