Изобретение относится к области радиолокации и предназначено для использования при создании радиолокаторов с синтезированной апертурой антенны (РСА) воздушного и комического базирования. Достигаемый технический результат - построение радиолокационного изображения (РЛИ) неподвижной подстилающей поверхности и обнаружение движущихся целей (ДЦ) на фоне отражений от подстилающей поверхности в широкой, неоднозначной по дальности полосе съемки при использовании сверхширокополосных зондирующих радиоимпульсов с изменяемыми от радиоимпульса к радиоимпульсу периодом повторения и волновой формой и минимальной потере потенциала радиолокатора, стремящейся к нулю Децибел при увеличении скважности зондирующих радиоимпульсов.
Однозначная по дальности полоса съемки - такая полоса, все отраженные радиосигналы от которой расположены на временной оси в одном приемном стробе, длительность которого не превышает времени между срезом текущего и фронтом следующего зондирующих радиоимпульсов. При этом периоды зондирования, в которых происходит прием отраженного радиосигнала, могут не совпадать с периодами излучения зондирующего радиосигнала. Неоднозначная по дальности полоса съемки -такая полоса, для которой отраженные радиосигналы по времени расположены в двух и более приемных стробах или, иными словами, попадают в два и более периода повторения зондирующих радиоимпульсов [1, 2].
Под волновой формой радиоимпульса, в зарубежной литературе именуемой как «waveform», понимается «геометрическая форма, которая получена путем отображения характеристик волны как функции некоторой переменной, обычно, времени» [1]. В частности, под это определение подпадает осциллограмма радиоимпульса, - функция, отображающая зависимость мгновенного значения сигнала от времени. Форма данной функции зависит в том числе от внутриимпульсной фазовой, частотной и амплитудной модуляции и от несущей частоты радиоимпульса.
Под потенциалом радиолокатора понимается величина, определяемая формулой [1,3]:

где q - заданное отношение сигнал/шум на выходе согласованного фильтра радиолокатора;
Rmax - максимальная дальность обнаружения цели с заданной эффективной площадью рассеяния (ЭПР);
σЦ - заданная ЭПР цели.
Под ресемплингом понимается процесс взятия выборок некоторого оцифрованного сигнала в другие моменты времени, не совпадающие с исходными. Ресемплинг как правило реализуется при помощи цифровых фильтров с дробной задержкой (Digital Fractional Delay Filters), наиболее распространенным из которых является фильтр Фэрроу [4…12].
Известен способ продольной интерферометрии вдоль линии пути и реализующий его PC А [13]. Данный способ реализуют при использовании в РСА активной фазированной антенной решетки (АФАР), разделенной на две или большее число секций. При использовании двухсекционной антенны на передачу сигналы от обеих секций суммируют, а прием и обработку ведут независимо для каждой секции. В каждом из двух приемных каналов (А и В) принятый антенной секцией радиосигнал усиливают, переносят в базовую область частот и оцифровывают, после чего формируют комплексные РЛИ (КРЛИ), - двумерные массивы, представленные комплексными отсчетами, причем процесс формирования КРЛИ в канале А задерживают на период повторения зондирующих радиоимпульсов Тзри. После получения КРЛИ в каналах А и В, данные КРЛИ суммируют в сумматоре и вычитают в вычитателе. На выходе сумматора получают суммарное КРЛИ, а на выходе вычитателя - разностное КРЛИ. Снятая подстилающая поверхность, неподвижные и движущиеся цели присутствуют на суммарном КРЛИ, а на разностном КРЛИ - лишь радиально движущиеся цели, которые обнаруживают далее в обнаружителе движущихся целей путем пороговой обработки. Затем вычисляют скорости обнаруженных движущихся целей и корректируют азимутальные координаты движущихся целей.
РСА, реализующий данный способ, содержит: формирователь зондирующего радиосигнала, разделенную на две секции приемопередающую АФАР, два цифровых приемника, два формирователя КРЛИ, блок задержки на время Тзри, сумматор, вычитатель, обнаружитель движущихся целей и вычислитель скорости движущихся целей и поправки к координате азимута.
Недостатками данных способа и устройства являются:
- необходимость использования двух приемных позиций, образуемых половинами антенного полотна АФАР, что приводит к уменьшению потенциала радиолокатора и, следовательно, ухудшению качества съемки;
- обнаружение лишь радиально движущихся целей;
- наличие слепых скоростей, при которых разность фаз между комплексными сигналами интерферометрических каналов кратна 2π, и движущиеся цели не обнаруживаются;
- фиксированное значение частоты повторения зондирующих радиоимпульсов, позволяющее вести съемку лишь в узкой однозначной по дальности полосе съемки.
Известен способ пространственно-частотной фильтрации (ПЧФ) и реализующий его РСА [14…16]. Данный способ реализуют с использованием антенного устройства с тремя частично перекрывающимися в азимутальной плоскости лучами. Центральный луч, направленный по нормали к вектору путевой скорости, подключают к передатчику и используют для излучения зондирующего радиосигнала. Через боковые лучи, отклоненные вперед и назад на некоторый угол, не превышающий половины ширины диаграммы направленности, принимают отраженные от снимаемой подстилающей поверхности радиосигналы, которые усиливают далее в двух независимых приемниках, на выходах которых оцифровывают усиленные радиосигналы при помощи аналого-цифровых преобразователей АЦП-1 и АЦП-2. Затем в каждом канале производят синтез РЛИ, включающий в себя на первом этапе сжатие по дальности с компенсацией миграции. Далее выполняют сжатие по азимуту с использованием алгоритма быстрой свертки, который в общем виде включает в себя быстрое преобразование Фурье (БПФ) по азимуту, умножение на опорную функцию и обратное БПФ. В рассматриваемом случае РСА с селекцией движущихся целей (СДЦ) фазовые функции опорного спектра в каждом канале согласовывают с принятым радиосигналом, а огибающие опорных спектров делают различными. При сжатии полученных сигналов по азимуту спектр доплеровских частот сигнала S1 умножают на опорную функцию Kf1, огибающая которой совпадает с огибающей доплеровского спектра сигнала S2, и наоборот, спектр доплеровских частот сигнала S2 умножают на опорную функцию Kf2, огибающая которой совпадает с огибающей доплеровского спектра сигнала S1. В результате доплеровские спектры сигналов обоих каналов для неподвижных целей и фона местности совпадают. Далее вычисляют разность между двумя полученными РЛИ. Полученные после сжатия по азимуту и детектирования радиолокационные изображения для неподвижных целей оказываются идентичными и при вычитании компенсируются. Для движущихся целей огибающие доплеровских спектров принятых радиосигналов смещаются, что приводит к разнице амплитуд синтезированных РЛИ и при их вычитании дает разность РЛИ, отличную от нуля и пропорциональную скорости цели. Суммарное и разностное РЛИ подают в блок, вычисляющий координаты и скорости целей.
РСА, реализующий данный способ, содержит: передатчик, антенное устройство с тремя частично перекрывающимися в азимутальной плоскости лучами, два цифровых приемника с аналого-цифровыми преобразователями на выходе, два блока синтеза РЛИ с различными опорными спектрами, блок вычисления суммарного РЛИ, блок вычисления разностного РЛИ, вычислитель координат и скорости целей.
Недостатками данных способа и устройства являются:
- выделение лишь радиально движущихся целей, тангенциально движущиеся цели не выделяются;
- потеря потенциала РСА из-за работы на скатах приемных диаграмм направленностей (ДН), повернутых от центрального направления передающего луча;
- сокращение эффективной длины синтезированной апертуры из-за взаимного разворота приемных ДН и, как следствие, ухудшение потенциального разрешения по азимуту;
- потеря потенциала РСА из-за сложения некогерентных между собой шумов двух приемных каналов и использования некогерентной обработки;
- потеря потенциала РСА при больших радиальных скоростях цели, выходящих за пределы дискриминационной характеристики алгоритма ПФЧ.
Известен способ дифференциальной дефокусировки для обнаружения движущихся целей по тангенциальной составляющей скорости и реализующий его РСА [14]. При использовании данного способа формируют зондирующий радиосигнал и излучают его в направлении снимаемой подстилающей поверхности через приемо-передающую антенну. Отраженный от подстилающей поверхности радиосигнал принимают через эту же антенну, усиливают, оцифровывают и сжимают по дальности. Затем полученный сигнал сжимают по азимуту в двух независимых каналах с разными опорными функциями, смещенными по значениям путевой скорости на некоторый шаг дефокусировки ΔVx. Полученные в каналах РЛИ суммируют, получая суммарное РЛИ, и вычитают, получая разностное РЛИ. Далее суммарное РЛИ и разностное РЛИ перемножают, и в полученном РЛИ обнаруживают движущиеся цели.
РСА, реализующий данный способ, содержит: передатчик, приемопередающую антенну, цифровой приемник, блок сжатия по дальности, два блока сжатия по азимуту с различными опорными функциями, смещенными по значениям путевой скорости, блок вычисления суммарного РЛИ, блок вычисления разностного РЛИ, блок перемножения РЛИ, обнаружитель движущихся целей.
Недостатками данных способа и устройства являются:
- выделение лишь тангенциально движущихся целей, радиально движущиеся цели не выделяются;
- потеря потенциала РСА для всех тангенциальных скоростей цели, отличных от шага дефокусировки ΔVx, особенно при больших тангенциальных скоростях цели, выходящих за пределы дискриминационной характеристики рассматриваемого способа;
- ухудшение характеристик формируемого суммарного РЛИ из-за дефокусировки.
Известны способ радиолокационной съемки, использующий дальностно-доплеровский («Range-Doppler») алгоритм [17…24], и реализующий его РСА, фиг. 1.
При использовании данного способа формируют зондирующий радиосигнал с фиксированным периодом повторения одинаковых радиоимпульсов и излучают его в направлении снимаемой подстилающей поверхности через приемо-передающую антенну. Отраженный от подстилающей поверхности радиосигнал принимают через эту же антенну, усиливают, оцифровывают. Таким образом получают исходные данные или цифровую радиоголограмму (ЦРГ), - двумерный массив комплексных отсчетов Uin (tr,tx). Номера вдоль первой (вертикальной) размерности этого массива (быстрого времени tr) соответствуют элементам (дискретам) наклонной дальности, а номера вдоль второй (горизонтальной) размерности (медленного времени tx) - элементам азимута, каждый из которых в свою очередь соответствует своему зондирующему радиоимпульсу. Затем выполняют БПФ вдоль наклонной дальности (вдоль быстрого времени tr) для каждого столбца ЦРГ Uin (tr,tx). После этого каждый столбец полученного двумерного массива Sin (ƒr,tx) дальностных спектров ЦРГ умножают на столбец опорного спектра дальностного согласованного фильтра (СФ) SRMFreƒ (ƒr), полученный взятием БПФ от столбца HRMF (tr) импульсной характеристики дальностного СФ для используемого зондирующего радиоимпульса. В результате получают двумерный массив SRC (ƒr,tx) дальностных спектров сжатой по дальности ЦРГ, который после обратного БПФ вдоль частоты ƒr преобразуют в двумерный массив сжатой по дальности ЦРГ URC (tr,tx). Затем выполняют построчное БПФ вдоль медленного времени tx над строками данного массива и получают двумерный массив SRC (tr,ƒc) азимутальных спектров сжатой по дальности ЦРГ, после чего путем ресемплинга [4…12] производят коррекцию миграции сигнала по элементам дальности (Range Cell Migration Correction - RCMC) и получают двумерный массив SRCMC (tr,ƒx) азимутальных спектров сжатой по дальности ЦРГ со скорректированной миграцией по элементам дальности.
Рассчитывают двумерный массив SAMFreƒ (tr,tx) импульсных характеристик азимутального СФ и выполняют построчно БПФ вдоль медленного времени tx данного массива, получают при этом двумерный массив SAMFreƒ (tr,ƒx) опорных спектров азимутального СФ. Двумерный массив SRCMC (tr,ƒx) азимутальных спектров сжатой по дальности ЦРГ со скорректированной миграцией по элементам дальности поэлементно умножают на двумерный массив SAMFreƒ (tr,ƒx) опорных спектров азимутального СФ, получают при этом двумерный массив SAMFout (tr,ƒx) азимутальных спектров выходного сигнала азимутального СФ. Вычисляют построчно обратное БПФ вдоль частоты ƒx указанного массива, получают при этом двумерный массив URLI (tr,tx) комплексных отсчетов РЛИ подстилающей поверхности и вычисляют амплитуды комплексных отсчетов данного массива. Получают при этом двумерный массив IRLI (tr,tx) пикселей РЛИ подстилающей поверхности, который отображают на индикаторе РЛИ подстилающей поверхности.
РСА, реализующий данный способ, содержит (фиг. 1):
- банк импульсных характеристик дальностного СФ;
- первый блок БПФ вдоль быстрого времени tr;
- цифровой формирователь зондирующего радиосигнала;
- аналого-цифровую приемо-передающую антенно-усилительную систему;
- блок памяти ЦРГ;
- второй блок БПФ вдоль быстрого времени tr;
- первый блок умножения;
- блок обратного БПФ вдоль частоты ƒr;
- первый блок БПФ вдоль медленного времени tx;
- блок коррекции миграции сигнала по элементам дальности (RCMC);
- блок расчета импульсных характеристик азимутального СФ;
- второй блок БПФ вдоль медленного времени tx;
- второй блок умножения;
- блок обратного БПФ вдоль частоты ƒx;
- блок вычисления амплитуд;
- индикатор РЛИ подстилающей поверхности.
Недостатками данных способа и устройства являются:
- высокий уровень боковых лепестков формируемого РЛИ при значительной миграции сигнала по дальности [25];
- размытие и смещение на получаемом РЛИ отметок от движущихся целей, затрудняющие обнаружение и искажающие координаты движущихся целей;
- узкая полоса съемки по дальности, ширина которой определяется периодом повторения зондирующих радиоимпульсов;
- наложение на полезный радиосигнал, отраженный от снимаемого участка дальности, мешающих паразитных радиосигналов, отраженных от других, ближних и дальних участков дальности, попадающих в соседние периоды повторения зондирующих радиоимпульсов, что приводит к искажению получаемого РЛИ.
Известны способ радиолокационной съемки, использующий «Omega-k» (или «wavenumber») алгоритм [22, 26…31], и реализующий его РСА, фиг. 2, выбранные в качестве прототипа.
При использовании данного способа
хранят столбец HRMF (tr) импульсной характеристики дальностного СФ для используемого зондирующего радиоимпульса,
формируют зондирующий радиосигнал с фиксированным периодом повторения одинаковых зондирующих радиоимпульсов, соответствующих импульсной характеристике, хранимой в столбце HRMF (tr) импульсной характеристики дальностного СФ для используемого зондирующего радиоимпульса, и излучают этот радиосигнал в направлении снимаемой подстилающей поверхности при помощи аналого-цифровой приемопередающей антенно-усилительной системы,
отраженный от подстилающей поверхности радиосигнал принимают при помощи аналого-цифровой приемо-передающей антенно-усилительной системы и получают ЦРГ Uin (tr,tx), представляющую собой двумерный массив комплексных отсчетов, где tr - быстрое время вдоль наклонной дальности r, a tx - медленное время вдоль азимутальной координаты х,
ЦРГ Uin (tr,tx) делят вдоль быстрого времени tr на NRG групп отсчетов по наклонной дальности, получают при этом трехмерный массив комплексных отсчетов Uin (tr,tx,nRG), где nRG - номер группы отсчетов по наклонной дальности, являющийся так же номером страниц в указанном трехмерном массиве,
в каждой группе отсчетов по наклонной дальности в трехмерном массиве комплексных отсчетов Uin (tr,tx,nRG) выполняют БПФ вдоль быстрого времени tr для каждого столбца отсчетов и получают при этом трехмерный массив Sin (ƒr,tx,nRG) дальностных спектров ЦРГ, где ƒr - дальностная частота,
выполняют БПФ от хранимого столбца HRMF (tr) импульсной характеристики дальностного СФ для используемого зондирующего радиоимпульса, получают при этом столбец SAMFreƒ (ƒr) опорного спектра дальностного СФ, столбцы трехмерного массива Sin (ƒr,tx,nRG) дальностных спектров ЦРГ поэлементно умножают на столбец SAMFreƒ (ƒr) опорного спектра дальностного СФ, получают при этом трехмерный массив SRC (ƒr, tx, nRG) дальностных спектров сжатой по дальности ЦРГ,
выполняют БПФ вдоль медленного времени tx трехмерного массива SRC (ƒr,tx,nRG) дальностных спектров сжатой по дальности ЦРГ, получают при этом трехмерный массив SRC (ƒr,ƒx,nRG) двумерных спектров сжатой по дальности ЦРГ,
рассчитывают трехмерный массив импульсных характеристик азимутального СФ
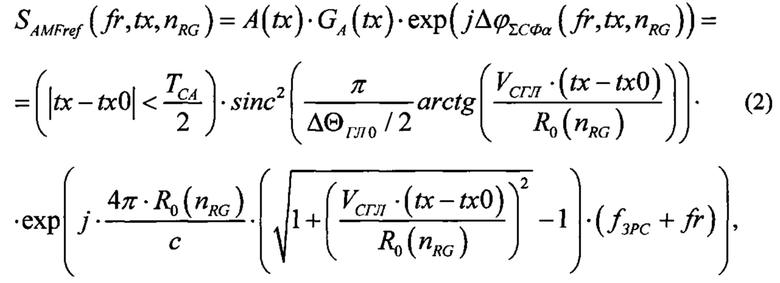
где 
- множитель бланкирования временной опорной функции;

- нормированная сквозная ДН антенны РСА;
 - мнимая единица;
- мнимая единица;


- опорная фазовая функция азимутального СФ от медленного времени tx для дальностной частоты ƒr и номера группы элементов дальности nRG;
 - центральное значение медленного времени tx;
- центральное значение медленного времени tx;
ТСА - время синтезирования апертуры;
ΔΘГЛ0 - ширина главного лепестка (ГЛ) ДН антенны РСА по уровню нулевой мощности;
VСГЛ - скорость движения следа ГЛ ДН антенны РСА по подстилающей поверхности;
R0(nRG) - траверсная наклонная дальность центра группы элементов дальности с номером nRG;
с - скорость распространения электромагнитных волн в вакууме;
ƒЗPC - несущая частота зондирующего радиосигнала;
выполняют построчно БПФ вдоль медленного времени tx трехмерного массива SAMFreƒ (ƒr, tx, nRG) импульсных характеристик азимутального СФ, получают при этом трехмерный массив SAMFreƒ (ƒr,ƒx,nRG) опорных двумерных спектров азимутального СФ,
трехмерный массив SRC (ƒr,ƒx,nRG) двумерных спектров сжатой по дальности ЦРГ поэлементно умножают на трехмерный массив SAMFreƒ (ƒr,ƒx,nRG) опорных двумерных спектров азимутального СФ, получают при этом трехмерный массив SAMFout (ƒr,ƒx,nRG) двумерных спектров выходного сигнала азимутального СФ,
выполняют постолбцовое обратное БПФ трехмерного массива SAMFout (ƒr,ƒх,nRG) двумерных спектров выходного сигнала азимутального СФ вдоль частоты ƒr, получают при этом трехмерный массив SAMFout (tr,ƒх,nRG) азимутальных спектров выходного сигнала азимутального СФ,
страницы трехмерного массива SAMFout (tr,ƒx,nRG) азимутальных спектров выходного сигнала азимутального СФ выстраивают вдоль первой размерности - быстрого времени tr, получают при этом двумерный массив SAMFout (tr,ƒx) азимутальных спектров выходного сигнала азимутального СФ,
рассчитывают двумерный массив корректирующих функций

где λ - длина волны зондирующего радиосигнала;
R0 (nRSG) траверсная наклонная дальность центра подгруппы элементов дальности с номером nRSG;
ƒx - частота азимутального сигнала вдоль медленного времени tx;
двумерный массив SAMFout (tr,ƒx) азимутальных спектров выходного сигнала азимутального СФ построчно умножают на двумерный массив Scorr (tr, ƒx) корректирующих функций, получают при этом двумерный массив SAMFoutcorr (tr, ƒx) скорректированных азимутальных спектров,
вычисляют построчно обратное БПФ вдоль частоты ƒx двумерного массива SAMFoutcorr (tr, ƒx) скорректированных азимутальных спектров, получают при этом двумерный массив URLI (tr,tx) комплексных отсчетов радиолокационного изображения (РЛИ) подстилающей поверхности,
вычисляют амплитуды комплексных отсчетов двумерного массива URLI (tr,tx) комплексных отсчетов РЛИ подстилающей поверхности, получают при этом двумерный массив пикселей РЛИ подстилающей поверхности

двумерный массив IRLI (tr,tx) пикселей РЛИ подстилающей поверхности отображают на индикаторе РЛИ подстилающей поверхности.
РСА, реализующий данный способ, содержит, фиг. 2:
- банк импульсных характеристик дальностного СФ;
- первый блок БПФ вдоль быстрого времени tr;
- цифровой формирователь зондирующего радиосигнала;
- аналого-цифровую приемо-передающую антенно-усилительную систему;
- блок памяти ЦРГ;
- блок деления элементов дальности на группы;
- второй блок БПФ вдоль быстрого времени tr;
- первый блок умножения;
- первый блок БПФ вдоль медленного времени tx;
блок расчета трехмерного массива импульсных характеристик азимутального СФ;
- второй блок БПФ вдоль медленного времени tx;
- второй блок умножения;
- первый блок обратного БПФ вдоль частоты ƒr;
- первый блок объединения групп элементов дальности;
- блок расчета корректирующих функций;
- третий блок умножения;
- первый блок обратного БПФ вдоль частоты ƒx;
- первый блок вычисления амплитуд;
- индикатор РЛИ подстилающей поверхности.
Недостатками данных способа и устройства являются:
- размытие и смещение на получаемом РЛИ отметок от движущихся целей, затрудняющие обнаружение и искажающие координаты движущихся целей;
- узкая полоса съемки по дальности, ширина которой определяется периодом повторения зондирующих радиоимпульсов;
- наложение на полезный радиосигнал, отраженный от снимаемого участка дальности, мешающих паразитных радиосигналов, отраженных от других, ближних и дальних участков дальности, попадающих в соседние периоды повторения зондирующих радиоимпульсов, что приводит к искажению получаемого РЛИ.
Изобретение направлено на обеспечение построения РЛИ неподвижной подстилающей поверхности и обнаружения ДЦ на фоне отражений от подстилающей поверхности в широкой, неоднозначной по дальности полосе съемки при использовании сверхширокополосных зондирующих радиоимпульсов с изменяемыми от радиоимпульса к радиоимпульсу периодом повторения и волновой формой и минимальной потере потенциала радиолокатора, стремящейся к нулю Децибел при увеличении скважности зондирующих радиоимпульсов.
Это достигается тем, что
- в течение съемки изменяют период повторения и волновую форму зондирующих радиоимпульсов от радиоимпульса к радиоимпульсу;
- при согласованной фильтрации отраженного от подстилающей поверхности радиосигнала по дальности в дальностный СФ подают импульсные характеристики, соответствующие излученным радиоимпульсам;
- перед подачей обрабатываемого сигнала в азимутальный СФ корректируют путем ресемплинга период дискретизации азимутального сигнала вдоль оси медленного времени tx;
- азимутальную согласованную фильтрацию проводят для всех возможных сочетаний значений (гипотез) на плоскости радиальной Vr и азимутальной Vx скоростей обнаруживаемых ДЦ, формируя таким образом РЛИ для каждого сочетания гипотез и получая 4-мерный массив пикселей радиолокационных изображений;
- в полученном 4-мерном массиве осуществляют обнаружение точечных ДЦ при помощи расширенного алгоритма обнаружения с постоянным уровнем ложных тревог (CFAR), [32, 33];
- отображают обнаруженные ДЦ на индикаторе движущихся целей.
Изобретение (способ) отличается от ближайшего известного аналога [22, 26…31], при котором
хранят столбец HRMF (tr) импульсной характеристики дальностного СФ для используемого зондирующего радиоимпульса,
формируют зондирующий радиосигнал с фиксированным периодом повторения одинаковых зондирующих радиоимпульсов, соответствующих импульсной характеристике, хранимой в столбце HRMF (tr) импульсной характеристики дальностного СФ для используемого зондирующего радиоимпульса, и излучают этот радиосигнал в направлении снимаемой подстилающей поверхности при помощи аналого-цифровой приемопередающей антенно-усилительной системы,
отраженный от подстилающей поверхности радиосигнал принимают при помощи аналого-цифровой приемо-передающей антенно-усилительной системы и получают ЦРГ Uin (tr,tx),
ЦРГ Uin (tr,tx) делят вдоль быстрого времени tr на NRG групп отсчетов по наклонной дальности, получают при этом трехмерный массив комплексных отсчетов Uin (tr, tx, nRG),
в каждой группе отсчетов по наклонной дальности в трехмерном массиве комплексных отсчетов Uin (tr,tx,nRG) выполняют БПФ вдоль быстрого времени tr для каждого столбца отсчетов и получают при этом трехмерный массив Sin (ƒr,tx,nRG) дальностных спектров ЦРГ,
выполняют БПФ от хранимого столбца HRMF (tr) импульсной характеристики дальностного СФ для используемого зондирующего радиоимпульса, получают при этом столбец SAMFreƒ (ƒr) опорного спектра дальностного СФ,
столбцы трехмерного массива Sin (ƒr,tx,nRG) дальностных спектров ЦРГ поэлементно умножают на столбец SAMFreƒ (ƒr) огюрного спектра дальностного СФ, получают при этом трехмерный массив SRC (ƒr,tx,nRG) дальностных спектров сжатой по дальности ЦРГ,
выполняют БПФ вдоль медленного времени tx трехмерного массива SRC (ƒr,tx,nRG) дальностных спектров сжатой по дальности ЦРГ, получают при этом трехмерный массив SRC (ƒr, ƒx,nRG) двумерных спектров сжатой по дальности ЦРГ,
рассчитывают трехмерный массив импульсных характеристик азимутального СФ SAMFreƒ (ƒr,tx,nRG),
выполняют построчно БПФ вдоль медленного времени tx трехмерного массива SAMFreƒ (ƒr,tx,nRG) импульсных характеристик азимутального СФ, получают при этом трехмерный массив SAMFreƒ (ƒr, ƒx, nRG) опорных двумерных спектров азимутального СФ,
трехмерный массив SRC (ƒr, ƒx,nRG) двумерных спектров сжатой по дальности ЦРГ поэлементно умножают на трехмерный массив SAMFreƒ (ƒr,ƒx,nRG) опорных двумерных спектров азимутального СФ, получают при этом трехмерный массив SAMFout (ƒr,ƒx,nRG) двумерных спектров выходного сигнала азимутального СФ,
выполняют постолбцовое обратное БПФ трехмерного массива SAMFout (ƒr,ƒx,nRG) двумерных спектров выходного сигнала азимутального СФ вдоль частоты ƒr, получают при этом трехмерный массив SAMFout (tr,ƒx,nRG) азимутальных спектров выходного сигнала азимутального СФ,
страницы трехмерного массива SAMFout (tr,ƒx,nRG) азимутальных спектров выходного сигнала азимутального СФ выстраивают вдоль первой размерности - быстрого времени tr, получают при этом двумерный массив SAMFout (tr, ƒx) азимутальных спектров выходного сигнала азимутального СФ,
рассчитывают двумерный массив корректирующих функций Scorr (tr, ƒx),
двумерный массив SAMFout (tr, ƒx) азимутальных спектров выходного сигнала азимутального СФ построчно умножают на двумерный массив Scorr (tr, ƒx) корректирующих функций, получают при этом двумерный массив SAMFoutcorr (tr, ƒx) скорректированных азимутальных спектров,
вычисляют построчно обратное БПФ вдоль частоты fx двумерного массива SAMFoutcorr (tr, ƒx) скорректированных азимутальных спектров, получают при этом двумерный массив URLI (tr, ƒx) комплексных отсчетов РЛИ подстилающей поверхности,
вычисляют амплитуды комплексных отсчетов двумерного массива URLI (tr,tx) комплексных отсчетов РЛИ подстилающей поверхности, получают при этом двумерный массив пикселей РЛИ подстилающей поверхности IRLI (tr,tx),
двумерный массив IRLI (tr,tx) пикселей РЛИ подстилающей поверхности отображают на индикаторе РЛИ подстилающей поверхности,
тем, что
хранят двумерный массив HRMF (tr,tx) импульсных характеристик дальностного СФ для всех используемых зондирующих радиоимпульсов,
зондирующий радиосигнал формируют с изменяемыми от радиоимпульса к радиоимпульсу периодом повторения и волновой формой, определяемой импульсными характеристиками, хранимыми в двумерном массиве HRMF (tr,tx) импульсных характеристик дальностного СФ для всех используемых зондирующих радиоимпульсов,
БПФ от импульсных характеристик, хранимых в столбцах двумерного массива HRMF (tr,tx) импульсных характеристик дальностного СФ для всех излучаемых зондирующих радиоимпульсов выполняют постолбцово для всех зондирующих радиоимпульсов, получают при этом двумерный массив SAMFreƒ (ƒr,tx) опорных спектров дальностных СФ для всех используемых зондирующих радиоимпульсов,
каждую страницу трехмерного массива Sin (ƒr,tx,nRG) дальностных спектров ЦРГ поэлементно умножают на двумерный массив SAMFreƒ (ƒr,tx) опорных спектров дальностных СФ для всех используемых зондирующих радиоимпульсов,
после получения трехмерного массива SRC (ƒr,tx,nRG) дальностных спектров сжатой по дальности ЦРГ выполняют коррекцию периода дискретизации содержащихся в строках данного массива азимутальных сигналов путем ресемплинга отсчетов данного массива вдоль медленного времени tx, то есть вдоль строк, например, при помощи интерполяционного многочлена Лагранжа

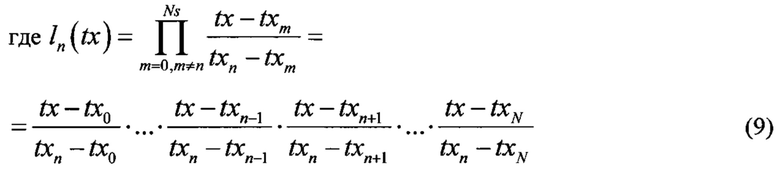
- базисные полиномы;
txn - нерегулярно расположенные моменты времени на входе операции ресемплинга;
tx - регулярно расположенные моменты времени на выходе операции ресемплинга;
SRC (ƒr,tx,nRG) - выходные отсчеты, взятые в регулярно расположенные моменты времени tx;
SRC (ƒr,txn,nRG) - входные отсчеты, взятые в нерегулярно расположенные моменты времени txn;
Ns - число используемых при ресемплинге входных отсчетов в окрестности вычисляемого выходного отсчета;
n=0…Ns - номер входного отсчета операции ресемплинга и базисного полинома;
m=0…Ns, кроме m≠n, - номер парциальной дроби при вычислении базисного полинома;
в результате чего получают отсчеты, взятые с равномерным периодом дискретизации на оси медленного времени tx, и лишь затем переходят к выполнению БПФ вдоль медленного времени tx,
рассчитывают четырехмерный массив импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr


выполняют построчно БПФ вдоль медленного времени tx четырехмерного массива SAMFreƒ (ƒr,tx,nRG,Vr) импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr, получают при этом четырехмерный массив SAMFreƒ (ƒr,ƒx,nRG,Vr) опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr,
трехмерный массив двумерных спектров сжатой по дальности ЦРГ SRC (ƒr,ƒx,nRG) умножают на все трехмерные подмассивы четырехмерного массива SAMFreƒ (ƒr,ƒx,nRG,Vr) опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr, получают при этом четырехмерный массив SAMFout (ƒr,ƒx,nRG,Vr) двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr,
выполняют постолбцовое обратное БПФ вдоль частоты ƒr четырехмерного массива SAMFout (ƒr,ƒx,nRG,Vr) двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, получают при этом четырехмерный массив SAMFout (tr,ƒx,nRG,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr,
в каждом трехмерном подмассиве четырехмерного массива SAMFout (tr,ƒx,nRG,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, страницы выстраивают и объединяют вдоль первой размерности - быстрого времени tr, получают при этом набор страниц, образующий трехмерный массив SAMFout (tr,ƒx,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr,
каждую страницу трехмерного массива SAMFout (tr,ƒx,nRG,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr поэлементно умножают на двумерный массив Scorr (tr, ƒx) корректирующих функций, получают при этом трехмерный массив SAMFoutcorr (tr,ƒx,Vr) скорректированных азимутальных спектров для всех значений радиальной скорости Vr,
рассчитывают трехмерный массив корректирующих по азимутальной скорости Vx функций

где R0(tr) - траверсная наклонная дальность, соответствующая быстрому времени tr,
каждую страницу трехмерного массива SAMFoutcorr (tr,ƒx,Vr) скорректированных азимутальных спектров для всех значений радиальной скорости Vr поэлементно умножают на все страницы трехмерного массива ScorrVx (tr,ƒx,Vx) корректирующих по азимутальной скорости Vx функций, полученные при этом для каждого значения Vr трехмерные массивы, выстроенные вдоль четвертой размерности - радиальной скорости Vr, образуют четырехмерный массив SAMFoutcorrVx (tr,ƒx,Vx,Vr) скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr,
вычисляют построчно обратное БПФ вдоль частоты ƒx четырехмерного массива SAMFoutcorrVx (tr,ƒx,Vx,Vr) скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr, получают при этом четырехмерный массив URLI (tr,tx,Vx,Vr) комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr,
вычисляют амплитуды комплексных отсчетов четырехмерного массива URLI (tr,tx,Vx,Vr) комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr, получают при этом четырехмерный массив пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr

вычисляют четырехмерный массив UGTh (tr,tx,Vx,Vr) общих порогов, например, по формуле

где UGTh_comt - некоторое постоянное значение общего порога; или, например, по формуле

где kGTh>1 - коэффициент превышения общего порога над средним значением интенсивности пикселей РЛИ;
numel (M) - функция определения числа элементов в массиве М,
вычисляют четырехмерный массив ULTh (tr,tx,Vx,Vr) местных порогов например, для каждого значения массива по формуле
где kLTh>1 - коэффициент превышения местного порога над средним значением интенсивности пикселей РЛИ в пределах местного четырехмерного подмассива ULSA;
Δtr - приращение быстрого времени tr в пределах местного четырехмерного подмассива ULSA;
Δtx - приращение медленного времени tx в пределах местного четырехмерного подмассива ULSA;
ΔVx - приращение азимутальной скорости ДЦ Vx в пределах местного четырехмерного подмассива;
ΔVr - приращение радиальной скорости ДЦ Vr в пределах местного четырехмерного подмассива;
суммирование производится в пределах местного четырехмерного подмассива

определяемого строками значений переменных Δtr, Δtx, ΔVx, ΔVr
[Δtr]= -Δtrmax…Δtrmax при условии 0 ≤ (tr + Δtr) < Tr,
[Δtx]= -Δtxmax…Δtxmax при условии 0 ≤ [tx + Δtx) < Tx,
[ΔVx]= -ΔVxmax…ΔVxmax при условии Vx min ≤ (Vx + ΔVx) < Vx max,
[ΔVr]= -ΔVrmax…ΔVrmax при условии Vr min ≤ (Vr + ΔVr) < Vr max;
Δtrmax - максимальное значение Δtr;
Δtxmax - максимальное значение Δtx;
ΔVxmax - максимальное значение ΔVx:
ΔVrmax - максимальное значение ΔVr;
Tr - ширина диапазона значений быстрого времени tr;
Tx - ширина диапазона значений медленного времени tx;
Vx min, Vx max - минимальная и максимальная азимутальные скорости обнаруживаемых ДЦ;
Vr min, Vr max - минимальная и максимальная радиальные скорости обнаруживаемых ДЦ;

- число элементов в местном четырехмерном подмассиве ULSA,
вычисляют четырехмерный массив максимумов соседних элементов

при условиях

где «|» - логическое ИЛИ;




вычисляют четырехмерный массив максимальных порогов

где максимум берется поэлементно между массивами UGTh, ULTh и UNMTh, сравнивают значения элементов четырехмерного массива IRLI (tr,tx,Vx,Vr) пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с соответствующими значениями четырехмерного массива UMTh (tr,tx,Vx,Vr) максимальных порогов, формируют при этом четырехмерный массив сигналов обнаружения ДЦ

поэлементно умножают элементы четырехмерного массива IRLI (tr,tx,Vx,Vr) пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы четырехмерного массива UMTD (tr,tx,Vx,Vr) сигналов обнаружения ДЦ, получают при этом четырехмерный массив пикселей РЛИ обнаруженных ДЦ

вычисляют максимальные значения четырехмерного массива IMT (tr,tx,Vx,Vr) пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей, получают при этом двумерный массив пикселей РЛИ обнаруженных ДЦ

отображают двумерный массив пикселей РЛИ обнаруженных ДЦ IMT (tr,tx) на индикаторе ДЦ.
Изобретение (устройство) отличается от ближайшего известного аналога [22, 26…31], фиг. 2, содержащего
банк импульсных характеристик дальностного СФ,
первый блок БПФ вдоль быстрого времени tr,
цифровой формирователь зондирующего радиосигнала,
аналого-цифровую приемо-передающую антенно-усилительную систему,
блок памяти цифровой ЦРГ,
блок деления элементов дальности на группы,
второй блок БПФ вдоль быстрого времени tr,
первый блок умножения,
первый блок БПФ вдоль медленного времени tx,
блок расчета трехмерного массива импульсных характеристик азимутального СФ,
второй блок БПФ вдоль медленного времени tx,
второй блок умножения,
первый блок обратного БПФ вдоль частоты ƒr,
первый блок объединения групп элементов дальности,
блок расчета корректирующих функций,
третий блок умножения,
первый блок обратного БПФ вдоль частоты ƒx,
первый блок вычисления амплитуд,
индикатор РЛИ подстилающей поверхности,
тем, что в устройство дополнительно введены, фиг. 3,
ресемплинговый блок коррекции периода дискретизации азимутальных сигналов, выполняющий ресемплинг вдоль медленного времени tx отсчетов трехмерного массива спектров сжатой по дальности ЦРГ, с входом и выходом,
блок расчета четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr с выходом,
третий блок построчного БПФ вдоль медленного времени tx четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr с входом и выходом,
четвертый блок умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr с первым и вторым входами и выходом,
второй блок обратного БПФ вдоль частоты ƒr четырехмерного массива двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, с входом и выходом,
второй блок объединения групп элементов дальности, выстраивающий и объединяющий вдоль первой размерности страницы трехмерных подмассивов четырехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, с входом и выходом,
пятый блок умножения, умножающий каждую страницу трехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr на двумерный массив корректирующих функций, с первым и вторым входами и выходом,
блок расчета корректирующих по азимутальной скорости Vx функций с выходом,
шестой блок умножения, умножающий каждую страницу трехмерного массива скорректированных азимутальных спектров для всех значений радиальной скорости Vr на все страницы трехмерного массива корректирующих по азимутальной скорости Vx функций, с первым и вторым входами и выходом,
второй блок построчного обратного БПФ вдоль частоты ƒx четырехмерного массива скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr, с входом и выходом,
второй блок вычисления амплитуд комплексных отсчетов четырехмерного массива комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с входом и выходом,
блок вычисления четырехмерного массива общих порогов с входом и выходом,
блок вычисления четырехмерного массива местных порогов с входом и выходом,
блок вычисления четырехмерного массива максимумов соседних элементов с входом и выходом,
блок вычисления четырехмерного массива максимальных порогов с первым, вторым и третьим входами и выходом,
блок компаратора, сравнивающий значения элементов четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx к Vr с соответствующими значениями четырехмерного массива максимальных порогов, с первым и вторым входами и выходом,
седьмой блок умножения, поэлементно умножающий элементы четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы четырехмерного массива сигналов обнаружения ДЦ, с первым и вторым входами и выходом,
блок вычисления максимальных значений четырехмерного массива пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей с входом и выходом,
индикатор ДЦ, отображающий двумерный массив пикселей РЛИ обнаруженных ДЦ, с входом,
причем
выход первого блока умножения подключен ко входу ресемплингового блока коррекции периода дискретизации азимутальных сигналов, выполняющего ресемплинг вдоль медленного времени tx отсчетов трехмерного массива спектров сжатой по дальности ЦРГ, выход которого подключен ко входу первого блока БПФ вдоль медленного времени tx, выход которого подключен к первому входу четвертого блока умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr,
выход блока расчета четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr подключен ко входу третьего блока построчного БПФ вдоль медленного времени tx четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr, выход которого подключен ко второму входу четвертого блока умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr, выход которого подключен ко входу второго блока обратного БПФ вдоль частоты ƒr четырехмерного массива двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, выход которого подключен ко входу второго блока объединения групп элементов дальности, выстраивающего и объединяющего вдоль первой размерности страницы трехмерных подмассивов четырехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, выход которого подключен к первому входу пятого блока умножения, умножающего каждую страницу трехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr на двумерный массив корректирующих функций,
выход блока расчета корректирующих функций подключен ко второму входу пятого блока умножения, умножающего каждую страницу трехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr на двумерный массив корректирующих функций, выход которого подключен к первому входу шестого блока умножения, умножающего каждую страницу трехмерного массива скорректированных азимутальных спектров для всех значений радиальной скорости Vr на все страницы трехмерного массива корректирующих по азимутальной скорости Vx функций,
выход блока расчета корректирующих по азимутальной скорости Vx функций подключен ко второму входу шестого блока умножения, умножающего каждую страницу трехмерного массива скорректированных азимутальных спектров для всех значений радиальной скорости Vr на все страницы трехмерного массива корректирующих по азимутальной скорости Vx функций, выход которого подключен ко входу второго блока построчного обратного БПФ вдоль частоты ƒx четырехмерного массива скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr, выход которого подключен ко входу второго блока вычисления амплитуд комплексных отсчетов четырехмерного массива комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr, выход которого подключен к первому входу седьмого блока умножения, поэлементно умножающего элементы четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы четырехмерного массива сигналов обнаружения ДЦ, к первому входу блока компаратора, сравнивающего значения элементов четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с соответствующими значениями четырехмерного массива максимальных порогов, ко входу блока вычисления четырехмерного массива местных порогов, ко входу блока вычисления четырехмерного массива максимумов соседних элементов, и ко входу блока вычисления четырехмерного массива общих порогов, выход которого подключен к первому входу блока вычисления четырехмерного массива максимальных порогов,
выход блока вычисления четырехмерного массива местных порогов подключен ко второму входу блока вычисления четырехмерного массива максимальных порогов,
выход блока вычисления четырехмерного массива максимумов соседних элементов подключен к третьему входу блока вычисления четырехмерного массива максимальных порогов, выход которого подключен ко второму входу блока компаратора, сравнивающего значения элементов четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с соответствующими значениями четырехмерного массива максимальных порогов, выход которого подключен ко второму входу седьмого блока умножения, поэлементно умножающего элементы четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы четырехмерного массива сигналов обнаружения ДЦ, выход которого подключен ко входу блока вычисления максимальных значений четырехмерного массива пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей, выход которого подключен ко входу индикатора ДЦ, отображающего двумерный массив пикселей РЛИ обнаруженных ДЦ.
Совокупность существенных признаков, отличающих изобретение от ближайшего аналога, при осуществлении изобретения обеспечивает построение РЛИ неподвижной подстилающей поверхности и обнаружение ДЦ на фоне отражений от подстилающей поверхности в широкой, неоднозначной по дальности полосе съемки при использовании сверхширокополосных зондирующих радиоимпульсов с изменяемыми от радиоимпульса к радиоимпульсу периодом повторения и волновой формой и минимальной потере потенциала радиолокатора, стремящейся к нулю Децибел при увеличении скважности зондирующих радиоимпульсов.
Изображенный на фиг. 1 радиолокатор с синтезированной апертурой антенны, использующий дальностно-доплеровский («Range-Doppler») алгоритм, содержит:
- банк импульсных характеристик дальностного СФ;
- первый блок БПФ вдоль быстрого времени tr;
- цифровой формирователь зондирующего радиосигнала;
- аналого-цифровую приемо-передающую антенно-усилительную систему;
- блок памяти ЦРГ;
- второй блок БПФ вдоль быстрого времени tr;
- первый блок умножения;
- блок обратного БПФ вдоль частоты ƒr;
- первый блок БПФ вдоль медленного времени tx;
- блок коррекции миграции сигнала по элементам дальности (RCMC);
- блок расчета импульсных характеристик азимутального СФ;
- второй блок БПФ вдоль медленного времени tx;
- второй блок умножения;
- блок обратного БПФ вдоль частоты ƒx;
- блок вычисления амплитуд;
- индикатор РЛИ подстилающей поверхности.
Показанный на фиг. 2 радиолокатор с синтезированной апертурой антенны, использующий «Omega-к» алгоритм, содержит:
- банк импульсных характеристик дальностного СФ (1);
- первый блок БПФ вдоль быстрого времени tr (2);
- цифровой формирователь зондирующего радиосигнала (3);
- аналого-цифровую приемо-передающую антенно-усилительную систему (4);
- блок памяти ЦРГ (5);
- блок деления элементов дальности на группы (6);
- второй блок БПФ вдоль быстрого времени tr (7);
- первый блок умножения (8);
- первый блок БПФ вдоль медленного времени tx (9);
блок расчета трехмерного массива импульсных характеристик азимутального СФ (10);
- второй блок БПФ вдоль медленного времени tx (11);
- второй блок умножения (12);
- первый блок обратного БПФ вдоль частоты ƒr (13);
- первый блок объединения групп элементов дальности (14);
- блок расчета корректирующих функций (15);
- третий блок умножения (16);
- первый блок обратного БПФ вдоль частоты ƒx (17);
- первый блок вычисления амплитуд (18);
- индикатор РЛИ подстилающей поверхности (19).
Представленный на фиг. 3 заявленный радиолокатор с синтезированной апертурой антенны, реализующий заявленный способ радиолокационной съемки Земли и околоземного пространства в неоднозначной по дальности полосе с селекцией движущихся целей на фоне отражений от подстилающей поверхности, содержит:
- банк импульсных характеристик дальностного СФ (1);
- первый блок БПФ вдоль быстрого времени tr (2);
- цифровой формирователь зондирующего радиосигнала (3);
- аналого-цифровую приемо-передающую антенно-усилительную систему (4);
- блок памяти ЦРГ (5);
- блок деления элементов дальности на группы (6);
- второй блок БПФ вдоль быстрого времени tr (7);
- первый блок умножения (8);
- первый блок БПФ вдоль медленного времени tx (9);
блок расчета трехмерного массива импульсных характеристик азимутального СФ (10);
- второй блок БПФ вдоль медленного времени tx (11);
- второй блок умножения (12);
- первый блок обратного БПФ вдоль частоты ƒr (13);
- первый блок объединения групп элементов дальности (14);
- блок расчета корректирующих функций (15);
- третий блок умножения (16);
- первый блок обратного БПФ вдоль частоты ƒx (17);
- первый блок вычисления амплитуд (18);
- индикатор РЛИ подстилающей поверхности (19);
- ресемплинговый блок коррекции периода дискретизации азимутальных сигналов (20), выполняющий ресемплинг вдоль медленного времени tx отсчетов трехмерного массива спектров сжатой по дальности ЦРГ, с входом и выходом;
- блок расчета четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr (21) с выходом,
- третий блок построчного БПФ вдоль медленного времени tx четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr (22) с входом и выходом;
- четвертый блок умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr (23) с первым и вторым входами и выходом;
- второй блок обратного БПФ вдоль частоты ƒr четырехмерного массива двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr (24) с входом и выходом;
- второй блок объединения групп элементов дальности (25), выстраивающий и объединяющий вдоль первой размерности страницы трехмерных подмассивов четырехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, с входом и выходом;
- пятый блок умножения (26), умножающий каждую страницу трехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr на двумерный массив корректирующих функций, с первым и вторым входами и выходом,
- блок расчета корректирующих по азимутальной скорости Vx функций (27) с выходом;
- шестой блок умножения (28), умножающий каждую страницу трехмерного массива скорректированных азимутальных спектров для всех значений радиальной скорости Vr на все страницы трехмерного массива корректирующих по азимутальной скорости Vx функций, с первым и вторым входами и выходом;
- второй блок построчного обратного БПФ вдоль частоты fix четырехмерного массива скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr (29), с входом и выходом,
- второй блок вычисления амплитуд комплексных отсчетов четырехмерного массива комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr (30) с входом и выходом;
- блок вычисления четырехмерного массива общих порогов (31) с входом и выходом;
- блок вычисления четырехмерного массива местных порогов (32) с входом и выходом;
- блок вычисления четырехмерного массива максимумов соседних элементов (33) с входом и выходом;
- блок вычисления четырехмерного массива максимальных порогов (34) с первым, вторым и третьим входами и выходом;
- блок компаратора (35), сравнивающий значения элементов четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с соответствующими значениями четырехмерного массива максимальных порогов, с первым и вторым входами и выходом;
- седьмой блок умножения (36), поэлементно умножающий элементы четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы четырехмерного массива сигналов обнаружения ДЦ, с первым и вторым входами и выходом;
- блок вычисления максимальных значений четырехмерного массива пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей (37) с входом и выходом;
- индикатор ДЦ (38), отображающий двумерный массив пикселей РЛИ обнаруженных ДЦ, с входом.
Приведенный на фиг. 4 цифровой формирователь зондирующего радиосигнала (3) содержит:
- двухпортовую память;
- генератор синхроимпульсов;
- логический элемент НЕ («NOT»);
- счетчик адреса чтения;
- блок комплексного сопряжения;
- ключ.
Изображенная на фиг. 5 аналого-цифровая приемо-передающая антенно-усилительная система (4), построенная на основе одной приемопередающей антенны, содержит:
- цифро-радиочастотный преобразователь (ЦРЧП);
- передающий радиочастотный усилитель;
- узел развязки приема-передачи;
- приемо-передающую антенну;
- малошумящий радиочастотный усилитель;
- радиочастотно-цифровой преобразователь (РЧЦП).
Показанный на фиг. 6 ЦРЧП, построенный по схеме с аналоговым преобразованием квадратурных составляющих, содержит:
- цифро-аналоговый преобразователь (ЦАП) I- составляющей;
- ЦАП Q- составляющей;
- фильтр нижних частот (ФНЧ) I- составляющей передающего тракта («ФНЧ I пер.»);
- ФНЧ Q- составляющей передающего тракта («ФНЧ Q пер.»);
- квадратурный модулятор:
- полосовой фильтр (ПФ) передающего тракта («ПФ пер.»).
Представленный на фиг. 6 РЧЦП, построенный по схеме с аналоговым формированием квадратурных составляющих, содержит:
- ПФ приемного тракта («ПФ пр.»);
- квадратурный демодулятор;
- ФНЧ I- составляющей приемного тракта («ФНЧ I пр.»);
- ФНЧ Q- составляющей приемного тракта («ФНЧ Q пр.»);
- аналого-цифровой преобразователь (АЦП) I- составляющей;
- АЦП Q- составляющей.
Приведенный на фиг. 7 ЦРЧП, построенный по схеме с цифровым преобразованием квадратурных составляющих, содержит:
- цифровой ФНЧ (ЦФНЧ) I- составляющей передающего тракта («ЦФНЧ I пер.»);
- ЦФНЧ Q- составляющей передающего тракта («ЦФНЧ Q пер.»);
- чередователь знака I- составляющей передающего тракта;
- чередователь знака Q- составляющей передающего тракта;
- мультиплексор
- ЦАП;
- полосовой фильтр передающего тракта («ПФ пер.»).
Изображенный на фиг. 7 РЧЦП, построенный по схеме с цифровым формированием квадратурных составляющих, содержит:
- полосовой фильтр приемного тракта («ПФ пр.»);
- АЦП;
- демультиплексор;
- чередователь знака I- составляющей приемного тракта;
- чередователь знака Q- составляющей приемного тракта;
- ЦФНЧ I- составляющей приемного тракта («ЦФНЧ I пр.»);
- ЦФНЧ Q- составляющей приемного тракта («ЦФНЧ Q пр.»).
Показанная на фиг. 8 аналого-цифровая приемо-передающая антенно-усилительная система (4), построенная на основе АФАР, содержит:
- ЦРЧП;
- делитель мощности;
- сумматор; -РЧЦП;
- N приемо-передающих модулей (ППМ), каждый из которых в свою очередь содержит:
- два переключателя (П);
- диаграммообразующую линию задержки (ЛЗ);
- диаграммообразующий аттенюатор (А);
- передающий радиочастотный усилитель;
- узел развязки приема-передачи;
- приемо-передающий излучатель;
- малошумящий радиочастотный усилитель.
Представленная на фиг. 9 аналого-цифровая приемо-передающая антенно-усилительная система (4), построенная на основе ЦАР, содержит:
- цифровой сумматор;
- N ППМ, каждый из которых в свою очередь содержит:
- мультиплексор (Mux);
- диаграммообразующий цифровой фазовращатель (ЦФВ);
- диаграммообразующую цифровую линию задержки (ЦЛЗ);
- диаграммообразующий цифровой аттенюатор (ЦА);
- демультиплексор (Demux);
- передающий корректирующий цифровой фильтр (ЦФ);
- формирователь предыскажений;
- ЦРЧП;
- передающий радиочастотный усилитель;
- узел развязки прием-передача;
- приемо-передающий излучатель;
- малошумящий радиочастотный усилитель;
- РЧЦП;
- приемный корректирующий ЦФ.
На фиг. 10 приведено расположение точечных отражателей (ТО) в полосе съемки на плоскости «азимут х - наклонная дальность r».
На фиг. 11 показано РЛИ, отображаемое на индикаторе РЛИ подстилающей поверхности (19).
На фиг. 12 представлены отображаемые на индикаторе ДЦ (38) отметки движущихся ТО, обнаруженных в заданном диапазоне скоростей.
Радиолокатор с синтезированной апертурой антенны, фиг. 3, реализующий способ радиолокационной съемки Земли и околоземного пространства в неоднозначной по дальности полосе с селекцией движущихся целей на фоне отражений от подстилающей поверхности, работает следующим образом.
В банк импульсных характеристик дальностного СФ (1) записывают и хранят предварительно рассчитанный двумерный массив HRMF (tr,tx) импульсных характеристик дальностного СФ для всех используемых зондирующих радиоимпульсов, который подается на выход рассматриваемого банка (1). Столбцы импульсных характеристик в массиве HRMF (tr,tx) представляют собой комплексно-сопряженные отображенные из начала в конец столбцы отсчетов зондирующих радиоимпульсов.
С выхода банка импульсных характеристик дальностного СФ (1) столбцы импульсных характеристик дальностного СФ поступают в первый блок БПФ вдоль быстрого времени tr (2) и в цифровой формирователь зондирующего радиосигнала (3), который формирует зондирующий радиоимпульс в соответствии с текущим поступившим на вход столбцом импульсной характеристики. Каждый зондирующий радиоимпульс имеет свою волновую форму, одним из параметров которой является несущая частота радиоимпульса в базовой полосе частот (baseband). Период повторения радиоимпульсов так же изменяется от радиоимпульса к радиоимпульсу.
Типы используемых зондирующих радиоимпульсов выбираются исходя из требуемой формы их функции неопределенности, которая должна иметь вид либо канцелярской кнопки, - с одним ярко выраженным узким максимумом вдоль осей временного и доплеровского сдвигов, либо вид гребня [34…44]. Таким требованиям в частности удовлетворяют следующие типы радиоимпульсов:
фазо-кодо-модулированный (ФКМ) бинарной последовательностью радиоимпульс;
- линейно-частотно-модулированный (ЛЧМ) радиоимпульс;
- нелинейно-частотно-модулированный (НлЧМ) радиоимпульс;
- частотно-кодо-модулированный (ЧКМ) радиоимпульс;
- ЛЧМ радиоимпульс, разделенный на элементы, которые перемешаны на временной оси в случайном порядке;
- НлЧМ радиоимпульс, разделенный на элементы, которые перемешаны на временной оси в случайном порядке;
- шумовой радиоимпульс, представляющий собой выборку шума в рабочем диапазоне частот радиолокатора.
Отсчеты зондирующих радиоимпульсов рассчитываются по формулам, известным из уровня техники [34…44].
Один из вариантов схемы цифрового формирователя зондирующего радиосигнала (3) приведен на фиг. 4. Данный цифровой формирователь зондирующего радиосигнала содержит:
- двухпортовую память;
- генератор синхроимпульсов;
- логический элемент НЕ («NOT»);
- счетчик адреса чтения;
- блок комплексного сопряжения;
- ключ.
Генератор синхроимпульсов формирует синхроимпульсы, в течение которых формируются зондирующие радиоимпульсы. В прототипе (фиг. 2) период повторения синхроимпульсов постоянен. В заявленном радиолокаторе (фиг. 3) период повторения синхроимпульсов изменяют от импульса к импульсу. Синхроимпульсы с выхода генератора синхроимпульсов поступают на логический элемент НЕ и на вход управления ключа. После инвертирования в логическом элементе НЕ инвертированные синхроимпульсы поступают на вход R счетчика адреса чтения и разрешают его инкремент по сигналу дискретизации с частотой fs, поступающему на вход С данного счетчика. Частота сигнала дискретизации fs равна частоте следования формируемых отсчетов квадратурных составляющих зондирующего радиосигнала. Сформированный счетчиком адреса чтения инверсный адрес чтения NOT(A_out), где NOT() - побитовая операция логического инвертирования (НЕ), поступает на вход адреса чтения A_out двухпортовой памяти, в которую через вход D_in из банка импульсных характеристик дальностного СФ предварительно была загружена импульсная характеристика дальностного СФ, соответствующая текущему формируемому радиоимпульсу. Поскольку адрес на выходе счетчика адреса чтения формируется в инверсном виде, считывание отсчетов из двухпортовой памяти через выход D_out производится в обратном порядке. Считываемые комплексные отсчеты поступают в блок комплексного сопряжения, в котором знак комплексной составляющей Q изменяется на противоположный, после чего получаются комплексные отсчеты текущего формируемого зондирующего радиоимпульса, которые через открытый в течение длительности радиоимпульса ключ поступают на выход цифрового формирователя зондирующего радиосигнала. Цифровой формирователь зондирующего радиосигнала (3) может быть построен и по другим схемам [47…53], что не влияет на сущность заявленного изобретения.
С выхода цифрового формирователя зондирующего радиосигнала (3) сформированные цифровые квадратурные отсчеты зондирующего радиосигнала поступают на вход аналого-цифровой приемо-передающей антенно-усилительной системы (4), которая:
- преобразовывает цифровой квадратурный зондирующий сигнал в аналоговую форму;
- преобразовывает по частоте квадратурный зондирующий сигнал из базовой полосы (baseband) на несущую частоту в диапазон рабочих частот;
- усиливает зондирующий радиосигнал в диапазоне рабочих частот;
- излучает зондирующий радиосигнал в направлении снимаемой подстилающей поверхности;
- принимает отраженный от подстилающей поверхности радиосигнал;
- усиливает принятый радиосигнал в диапазоне рабочих частот;
- преобразовывает по частоте принятый радиосигнал из диапазона рабочих частот в базовую полосу (baseband), получая при этом квадратурный принятый сигнал;
- оцифровывает квадратурный принятый сигнал, получая при этом комплексные отсчеты ЦРГ Uin (tr,tx), представляющей собой двумерный массив комплексных отсчетов, где tr - быстрое время вдоль наклонной дальности r, a tx - медленное время вдоль азимутальной координаты х.
Аналого-цифровая приемо-передающая антенно-усилительная система (4) может быть построена несколькими путями [54…58], например:
- на основе одной приемо-передающей антенны;
- на основе приемо-передающей активной фазированной антенной решетки (АФАР);
- на основе приемо-передающей цифровой антенной решетки (ЦАР).
Аналого-цифровая приемо-передающая антенно-усилительная система (4), построенная на основе одной приемо-передающей антенны, показанная на фиг. 5, содержит:
- цифро-радиочастотный преобразователь (ЦРЧП);
- передающий радиочастотный усилитель;
- узел развязки приема-передачи;
- приемо-передающую антенну;
- малошумящий радиочастотный усилитель;
- радиочастотно-цифровой преобразователь (РЧЦП).
Аналого-цифровая приемо-передающая антенно-усилительная система (4), построенная на основе одной приемо-передающей антенны, показанная на фиг. 5, работает следующим образом. Поступившие на вход аналого- цифровой приемо-передающей антенно-усилительной системы (4) с выхода цифрового формирователя зондирующего радиосигнала (3) цифровые квадратурные отсчеты зондирующего радиосигнала подаются на вход ЦРЧП, который преобразовывает входной сигнал в аналоговую форму, а также выполняет преобразование по частоте из базовой полосы (baseband) на несущую частоту в диапазон рабочих частот. Передающий радиочастотный усилитель, вход которого подключен к выходу ЦРЧП, усиливает в диапазоне рабочих частот зондирующий радиосигнал, поступающий на его вход с выхода ЦРЧП. Узел развязки приема-передачи, построенный либо на основе циркулятора, либо на основе радиочастотного переключателя, вход 1 которого подключен к выходу передающего радиочастотного усилителя, разъем 2 - к разъему антенны, а выход 3 - ко входу малошумящего радиочастотного усилителя, осуществляет передачу зондирующего радиосигнала в течение передающего строба с выхода передающего радиочастотного усилителя к приемо-передающей антенне и передачу принятого радиосигнала в течение приемного строба от приемо-передающей антенны к малошумящему радиочастотному усилителю. Приемо-передающая антенна излучает в течение передающего строба полученный от узла развязки приема-передачи зондирующий радиосигнал в направлении снимаемой подстилающей поверхности и принимает в течение приемного строба отраженный от подстилающей поверхности радиосигнал, который подается через узел развязки приема-передачи на вход малошумящего радиочастотного усилителя. Малошумящий радиочастотный усилитель усиливает принятый радиосигнал в диапазоне рабочих частот в течение приемного строба и выдает усиленный радиосигнал на свой выход, подключенный ко входу РЧЦП, который преобразовывает по частоте принятый в течение приемного строба радиосигнал из диапазона рабочих частот в базовую полосу (baseband), а также осуществляет аналого-цифровое преобразование, получая при этом комплексные отсчеты ЦРГ Uin (tr,tx), которые с выхода РЧЦП поступают на выход описанной аналого-цифровой приемо-передающей антенно-усилительной системы (4), построенной на основе одной приемо-передающей антенны.
ЦРЧП может быть построен по схемам с аналоговым или цифровым преобразованием квадратурных составляющих, а РЧЦП, - по схемам с аналоговым или цифровым формированием квадратурных составляющих [59].
ЦРЧП, построенный по схеме с аналоговым преобразованием квадратурных составляющих, показанный на фиг. 6, содержит:
- ЦАП I- составляющей;
- ЦАП Q- составляющей;
- ФНЧ I- составляющей передающего тракта («ФНЧ I пер.»);
- ФНЧ Q- составляющей передающего тракта («ФНЧ Q пер.»);
- квадратурный модулятор:
- ПФ передающего тракта («ПФ пер.»).
РЧЦП, построенный по схеме с аналоговым формированием квадратурных составляющих, показанный на фиг. 6, содержит:
- ПФ приемного тракта («ПФ пр.»);
- квадратурный демодулятор;
- ФНЧ I- составляющей приемного тракта («ФНЧ I пр.»);
- ФНЧ Q- составляющей приемного тракта («ФНЧ Q пр.»);
- АЦП I- составляющей;
- АЦП Q- составляющей.
ЦРЧП с аналоговым преобразованием квадратурных составляющих (фиг. 6) работает следующим образом. На «Вход IQ» поступают цифровые отсчеты I- и Q- квадратурных составляющих, которые раздельно подаются на соответствующие «ЦАП I» и «ЦАП Q», где преобразовываются в аналоговую форму, после чего фильтруются в ФНЧ соответственно I- и Q- каналов. С выходов указанных ФНЧ аналоговые квадратурные составляющие поступают в квадратурный модулятор, где переносятся в рабочий диапазон, и подаются в полосовой фильтр передающего тракта, который срезает все паразитные составляющие спектра сформированного зондирующего радиосигнала вне рабочего диапазона частот. После этого зондирующий радиосигнал поступает на «Выход РЧ».
РЧЦП с аналоговым формированием квадратурных составляющих (фиг. 6) работает следующим образом. Принятый радиосигнал, поступающий на «Вход РЧ», фильтруется в полосовом фильтре приемного тракта, который срезает все внеполосные мешающие составляющие спектра. С выхода полосового фильтра принятый радиосигнал подается на квадратурный демодулятор, который выделяет I- и Q- квадратурные составляющие, которые после фильтрации в ФНЧ I- и Q- каналов приемного тракта оцифровываются в АЦП I и АЦП Q. С выходов АЦП цифровые отсчеты квадратурных составляющих объединяются в один комплексный цифровой сигнал и подаются на «Выход IQ».
ЦРЧП, построенный по схеме с цифровым преобразованием квадратурных составляющих, показанный на фиг. 7, содержит:
- цифровой ФНЧ (ЦФНЧ) I- составляющей передающего тракта («ЦФНЧ I пер.»);
- ЦФНЧ Q- составляющей передающего тракта («ЦФНЧ Q пер.»);
- чередователь знака I- составляющей передающего тракта;
- чередователь знака Q- составляющей передающего тракта;
- мультиплексор
- ЦАП;
- полосовой фильтр передающего тракта («ПФ пер.»).
РЧЦП, построенный по схеме с цифровым формированием квадратурных составляющих, показанный на фиг. 7, содержит:
- полосовой фильтр приемного тракта («ПФ пр.»);
- АЦП;
- демультиплексор;
- чередователь знака I- составляющей приемного тракта;
- чередователь знака Q- составляющей приемного тракта;
- ЦФНЧ I- составляющей приемного тракта («ЦФНЧ I пр.»);
- ЦФНЧ Q- составляющей приемного тракта («ЦФНЧ Q пр.»).
ЦРЧП с цифровым преобразованием квадратурных составляющих работает следующим образом. На «Вход IQ» поступают цифровые отсчеты I-и Q- квадратурных составляющих, которые раздельно подаются на соответствующие «ЦФНЧ I пер.» и «ЦФНЦ Q пер.», в которых фильтруются, после чего в чередователях знака I- и Q- каналов производится изменение знака соответственно I- и Q- составляющих от выборки к выборке. Полученные составляющие с выходов чередователей поступают на входы мультиплексора, который осуществляет их чередование и выдает полученный поток выборок с удвоенной частотой дискретизации на вход ЦАП, на выходе которого формируется аналоговый сигнал в нескольких зонах Найквиста, который поступает в полосовой фильтр передающего тракта, где выделяются составляющие спектра, попадающие в рабочий диапазон частот. После этого сформированный описанным способом зондирующий радиосигнал поступает на «Выход РЧ».
РЧЦП с цифровым формированием квадратурных составляющих работает следующим образом. Принятый радиосигнал, поступающий на «Вход РЧ», фильтруется в полосовом фильтре приемного тракта, который срезает все внеполосные мешающие составляющие спектра. С выхода полосового фильтра принятый радиосигнал подается на АЦП, где оцифровывается. С выхода АЦП выборки оцифрованного сигнала поступают в демультиплексор, который разделяет их на четные и нечетные. Нечетные выборки поступают в чередователь знака I приемного тракта, а четные - в чередователь знака Q приемного тракта. С выходов чередователей знака I- и Q-квадратурные составляющие поступают в ЦФНЧ I и ЦФНЧ Q приемного тракта, в которых обрезаются все высокочастотные составляющие спектра, выходящие за пределы половины ширины рабочего диапазона частот. С выходов ЦФНЧ цифровые отсчеты сформированных квадратурных составляющих принятого радиосигнала объединяются в один комплексный цифровой сигнал и подаются на «Выход IQ».
Аналого-цифровая приемо-передающая антенно-усилительная система (4), построенная на основе АФАР, показанная на фиг. 8, содержит [60…62]:
- ЦРЧП;
- делитель мощности;
- сумматор;
- РЧЦП;
- N приемо-передащих модулей (ППМ), каждый из которых в свою очередь содержит:
- два переключателя (П);
- диаграммообразующую линию задержки (ЛЗ);
- диаграммообразующий аттенюатор (А);
- передающий радиочастотный усилитель;
- узел развязки приема-передачи;
- приемо-передающий излучатель;
- малошумящий радиочастотный усилитель.
Вместо диаграммообразующих ЛЗ при узком рабочем диапазоне частот радиолокатора могут быть использованы диаграммообразующие фазовращатели.
Аналого-цифровая приемо-передающая антенно-усилительная система (4), построенная на основе АФАР, показанная на фиг. 8, работает следующим образом. Поступившие на вход аналого-цифровой приемо-передающей антенно-усилительной системы (4) с выхода цифрового формирователя зондирующего радиосигнала (3) цифровые квадратурные отсчеты зондирующего радиосигнала подаются на вход ЦРЧП, который в течение передающего строба преобразовывает их в аналоговую форму, а также выполняет преобразование по частоте из базовой полосы (baseband) на несущую частоту в диапазон рабочих частот. Полученный на выходе ЦРЧП зондирующий радиосигнал в делителе мощности, вход которого подключен к выходу ЦРЧП, делится на N направлений, где N - число НИМ в АФАР, и с каждого выхода делителя мощности поступает в соответствующий НИМ. В каждом из N НИМ зондирующий радиосигнал поступает на правый по схеме вход переключателя «П n.1» (где n=1…N - номер НИМ), подключенный к соответствующему выходу делителя мощности. Выход данного переключателя «П n.1» в течение передающего строба включен в правое по схеме положение, и зондирующий радиосигнал поступает на подключенный к выходу переключателя «П n.1» вход диаграммообразующей «ЛЗ n», в которой задерживается по времени и подается на выход указанной ЛЗ, который подключен ко входу диаграммообразующего аттенюатора «А n», в котором зондирующий радиосигнал регулируется по амплитуде, после чего подается на выход указанного аттенюатора, подключенный ко входу переключателя «П n.2». Вносимые задержка и изменение амплитуды выбираются исходя из требуемой формы передающей ДН АФАР. Переключатель «П n.2», включенный в течение передающего строба в левое по схеме положение, передает зондирующий радиосигнал на свой левый по схеме выход, подключенный ко входу передающего радиочастотного усилителя, который усиливает в диапазоне рабочих частот поступающий на его вход зондирующий радиосигнал и выдает его на свой выход, подключенный ко входу 1 узла развязки приема-передачи рассматриваемого НИМ. Узел развязки приема-передачи, разъем 2 которого подключен к разъему приемо-передающего излучателя, а выход 3 - ко входу малошумящего радиочастотного усилителя, осуществляет передачу зондирующего радиосигнала в течение передающего строба со входа 1 на разъем 2. Зондирующий радиосигнал, прошедший в течение передающего строба через узел развязки приема-передачи в приемо-передающий излучатель, излучается в пространство указанным приемо-передающим излучателем в направлении снимаемой подстилающей поверхности. Приемопередающие излучатели других НИМ, подключенных к делителю мощности, излучают зондирующие радиосигналы в направлении снимаемой подстилающей поверхности аналогичным образом, в результате чего формируется передающая ДН АФАР, ГЛ которой накрывает снимаемый участок подстилающей поверхности.
В течение приемного строба приемо-передающий излучатель рассматриваемого НИМ принимает отраженный от подстилающей поверхности радиосигнал, который через узел развязки приема-передачи, осуществляющий в течение приемного строба передачу радиосигнала с разъема 2 на выход 3, поступает на вход малошумящего радиочастотного усилителя, в котором усиливается в диапазоне рабочих частот и подается на выход данного усилителя, подключенный к левому по схеме входу переключателя «П n.1», включенного в течение приемного строба в левое по схеме положение. С выхода переключателя «П n.1» принятый радиосигнал подается на диаграммообразующую линию задержки «ЛЗ n», осуществляющую задержку принятого радиосигнала, а с ее выхода - на диаграммообразующий аттенюатор «А n», в котором принятый радиосигнал регулируется по амплитуде. Вносимые задержка и изменение амплитуды выбираются исходя из требуемой формы приемной ДН АФАР. С выхода диаграммообразующего аттенюатора через переключатель «П n.2», включенный в течение приемного строба в правое по схеме положение, принятый радиосигнал поступает на выход данного переключателя, подключенный к соответствующему входу сумматора. Поступивший в сумматор принятый радиосигнал суммируется с аналогичными принятыми радиосигналами других ППМ. На выходе сумматора получается радиосигнал, принятый приемной ДН АФАР, ГЛ которой накрывает снимаемый участок подстилающей поверхности. Полученный суммарный принятый радиосигнал поступает на вход РЧЦП, подключенный к выходу сумматора. В ЦРЧП суммарный принятый радиосигнал преобразовывается по частоте из диапазона рабочих частот в базовую полосу (baseband) и оцифровывается. На выходе РЧЦП получаются комплексные отсчеты ЦРГ Uin(tr,tx), которые поступают на выход описанной аналого-цифровой приемо-передающей антенно-усилительной системы (4), построенной на основе АФАР.
Аналого-цифровая приемо-передающая антенно-усилительная система (4), построенная на основе ЦАР, показанная на фиг. 9, содержит [63…66]:
- цифровой сумматор;
- N ППМ, каждый из которых в свою очередь содержит:
- мультиплексор (Mux);
- диаграммообразующий цифровой фазовращатель (ЦФВ);
- диаграммообразующую цифровую линию задержки (ЦЛЗ);
- диаграммообразующий цифровой аттенюатор (ЦА);
- демультиплексор (Demux);
- передающий корректирующий цифровой фильтр (ЦФ);
- формирователь предыскажений;
- ЦРЧП;
- передающий радиочастотный усилитель;
- узел развязки прием-передача;
- приемо-передающий излучатель;
- малошумящий радиочастотный усилитель;
- РЧЦП;
- приемный корректирующий ЦФ.
Аналого-цифровая приемо-передающая антенно-усилительная система (4), построенная на основе ЦАР, показанная на фиг. 9, работает следующим образом. Поступающие на вход аналого-цифровой приемо-передающей антенно-усилительной системы (4) с выхода цифрового формирователя зондирующего радиосигнала (3) в течение передающего строба квадратурные цифровые отсчеты зондирующего радиосигнала поступают на все ГШМ, в каждом из которых через мультиплексор Mux, выход которого подключен к верхнему по схеме входу, проходят на диаграммообразующий ЦФВ, выполняющий изменение фазы передаваемого квадратурного цифрового сигнала, с выхода которого поступает на диаграммообразующую ЦЛЗ, осуществляющую задержку передаваемого квадратурного цифрового сигнала на нецелое в общем случае значение периодов дискретизации, с выхода которой подается на диаграммообразующий ЦА, регулирующий передаваемый квадратурный цифровой сигнал по амплитуде. Вносимые изменение фазы, задержка и изменение амплитуды выбираются исходя из требуемой формы передающей ДН ЦАР. С выхода диаграммообразующего ЦА цифровые отсчеты зондирующего радиосигнала через демультиплексор Demux, вход которого в течение передающего строба подключен к верхнему по схеме выходу, поступают на вход передающего корректирующего ЦФ, осуществляющего коррекцию комплексной частотной характеристики передающего тракта рассматриваемого ППМ в диапазоне рабочих частот. С выхода передающего корректирующего ЦФ цифровые отсчеты зондирующего радиосигнала подаются в формирователь предыскажений, выполняющий предварительное искажение передаваемого квадратурного цифрового сигнала, обеспечивающее работу передающего радиочастотного усилителя в режиме насыщения без нелинейного искажения зондирующего радиосигнала [67]. С выхода формирователя предыскажений цифровые отсчеты зондирующего радиосигнала поступают в ЦРЧП, который преобразовывает их в аналоговую форму и осуществляет преобразование по частоте из базовой полосы (baseband) на несущую частоту в диапазон рабочих частот. Полученный на выходе ЦРЧП зондирующий радиосигнал поступает на передающий радиочастотный усилитель, который усиливает его в диапазоне рабочих частот. С выхода передающего радиочастотного усилителя зондирующий радиосигнал проходит через узел развязки прием-передача, осуществляющий передачу зондирующего радиосигнала в течение передающего строба с выхода передающего радиочастотного усилителя к приемо-передающему излучателю, и излучается в пространство указанным приемо-передающим излучателем в направлении снимаемой подстилающей поверхности. Приемо-передающие излучатели других ППМ, подключенных к входу рассматриваемой аналого-цифровой приемо-передающей антенно-усилительной системы (4), излучают зондирующие радиосигналы в направлении снимаемой подстилающей поверхности аналогичным образом, в результате чего формируется передающая ДН АФАР, ГЛ которой накрывает снимаемый участок подстилающей поверхности. В течение приемного строба приемо-передающий излучатель рассматриваемого ППМ принимает отраженный от подстилающей поверхности радиосигнал, который поступает в узел развязки прием-передача, осуществляющий в течение приемного строба передачу радиосигнала от приемо-передающего излучателя ко входу малошумящего радиочастотного усилителя. Поступивший на вход малошумящего радиочастотного усилителя принятый радиосигнал усиливается в диапазоне рабочих частот и поступает в РЧЦП, где преобразовывается по частоте из диапазона рабочих частот в базовую полосу (baseband) и оцифровывается. С выхода РЧЦП цифровые отсчеты принятого радиосигнала поступают в приемный корректирующий ЦФ, осуществляющий коррекцию комплексной частотной характеристики приемного тракта ППМ в диапазоне рабочих частот. С выхода приемного корректирующего ЦФ через мультиплексор Mux n, выход которого в течение приемного строба подключен к нижнему по схеме входу, цифровые отсчеты принятого радиосигнала поступают в описанную выше диаграммообразующую цепочку, состоящую из ЦФВ, ЦЛЗ и ЦА, в которой осуществляются изменение фазы, задержка по времени и изменение амплитуды сигнала с целью диаграммообразования приемной ДН. Вносимые изменение фазы, задержка и изменение амплитуды выбираются исходя из требуемой формы приемной ДН ЦАР. С выхода демультиплексора Demux, вход которого в течение приемного строба подключен к нижнему по схеме выходу, цифровые отсчеты принятого радиосигнала подаются в цифровой сумматор, где суммируются с аналогичными цифровыми отсчетами других ППМ, работающих аналогичным образом. На выходе цифрового сумматора формируются цифровые отсчеты радиосигнала, принятого приемной ДН АФАР, ГЛ которой накрывает снимаемый участок подстилающей поверхности. Данные цифровые комплексные отсчеты представляют собой ЦРГ Uin(tr,tx), которая с выхода РЧЦП поступают на выход описанной аналого-цифровой приемо-передающей антенно-усилительной системы (4), построенной на основе ЦАР.
В любой из трех описанных аналого-цифровых приемо-передающих антенно-усилительных систем (4), представленных на фиг. 5, фиг. 8 и фиг. 9, прем отраженного от подстилающей поверхности радиосигнала производится в течение приемного строба, который начинается через некоторый относительно короткий интервал времени Δtзи после окончания текущего передающего строба и заканчивается за этот же интервал времени Δtзи до фронта следующего передающего строба. Отсчеты ЦРГ, не попадающие в приемный строб, обнуляются. Высота столбца ЦРГ в блоке памяти ЦРГ (5), то есть размер массива вдоль первой размерности, определяется шириной полосы съемки вдоль наклонной дальности. В классическом «Omega-k» алгоритме (фиг. 2) максимальное значение данной ширины по времени определяется интервалом времени между срезом текущего зондирующего радиоимпульса и фронтом следующего зондирующего радиоимпульса, примерно равным при большой скважности периоду повторения зондирующих радиоимпульсов. В заявленном изобретении существенно увеличенная ширина полосы съемки вдоль наклонной дальности по времени в несколько раз превышает средний период повторения зондирующих радиоимпульсов. Поэтому в каждом столбце периодически будут иметь место участки с нулевыми отсчетами, не попавшими в приемный строб. Протяженность участков с нулевыми отсчетами равна τЗРИ+2⋅ΔtЗИ, где τЗРИ - длительность зондирующего радиоимпульса, ΔtЗИ - длительность защитного интервала времени. Поскольку период повторения зондирующих радиоимпульсов изменяется от радиоимпульса к радиоимпульсу, положения участков с нулевыми отсчетами в каждом столбе будут различны и наличие указанных участков в ЦРГ не приведет к существенному искажению РЛИ снимаемой подстилающей поверхности. Будет иметь место лишь потеря потенциала радиолокатора, равная

где ТПЗРИ - средний период повторения зондирующих радиоимпульсов;
которая будет близка к 0 дБ при высокой скважности  (10 и более) и условии ΔtЗИ << τЗРИ.
(10 и более) и условии ΔtЗИ << τЗРИ.
С выхода аналого-цифровой приемо-передающей антенно-усилительной системы (4) ЦРГ Uin(tr,tx) подается на вход блока памяти ЦРГ (5), осуществляющий хранение указанной ЦРГ Uin(tr,tx) в течение времени обработки и ее выдачу на выход указанного блока (5).
С выхода блока памяти ЦРГ (5) хранимая ЦРГ Uin(tr,tx) поступает на вход блока деления элементов дальности на группы (6), в котором ЦРГ Uin(tr,tx) делят вдоль быстрого времени tr на NRG групп отсчетов по наклонной дальности.
Число групп отсчетов по наклонной дальности можно определить по формуле:

где
NRC - общее число элементов наклонной дальности в полосе съемки;

- число отсчетов (элементов) наклонной дальности в группе отсчетов по наклонной дальности;
ceil() - округление до ближайшего большего целого числа;

- максимальная ширина группы отсчетов по наклонной дальности; dR - ширина элемента разрешения по наклонной дальности;

- максимально допустимая миграция сигнала на краях интервала синтезирования;
RБГ - наклонная дальность ближней границы (БГ) полосы съемки;
ΔХСАБГ=VСГЛБГ⋅ТСАБГ - длина пути синтезирования апертуры антенны для БГ полосы съемки;
VСГЛБГ - скорость следа главного лепестка для БГ полосы съемки;
ТСАБГ - время синтеза апертуры антенны для БГ полосы съемки.
Выбор числа групп отсчетов по наклонной дальности не влияет на сущность заявленного изобретения.
После деления элементов дальности на группы получают трехмерный массив комплексных отсчетов Uin(tr,tx,nRG), где nRG=1…NRG - номер группы отсчетов по наклонной дальности, являющийся так же номером страниц в указанном трехмерном массиве. Полученный трехмерный массив комплексных отсчетов Uin(tr,tx,nRG} подают на выход рассматриваемого блока (6).
С выхода блока деления элементов дальности на группы (6) трехмерный массив комплексных отсчетов Uin(tr,tx,nRG) передается на вход второго блока БПФ вдоль быстрого времени tr (7), в котором в каждой группе отсчетов по наклонной дальности указанного трехмерного массива комплексных отсчетов Uin(tr,tx,nRG) выполняют БПФ вдоль быстрого времени tr для каждого столбца отсчетов и получают при этом трехмерный массив Sin[ƒr,tx,nRG) дальностных спектров ЦРГ, где ƒr - дальностная частота. Полученный массив подают на выход рассматриваемого блока (7).
В первом блоке БПФ вдоль быстрого времени tr (2) выполняют постолбцово, для всех используемых зондирующих радиоимпульсов, БПФ от поступившего на вход данного блока (2) двумерного массива HRMF(tr,tx) импульсных характеристик дальностного СФ для всех излучаемых зондирующих радиоимпульсов. Получают при этом двумерный массив SRMFreƒ(ƒr,tx) опорных спектров дальностных СФ для всех используемых зондирующих радиоимпульсов, который подают на выход рассматриваемого блока (2).
Каждую страницу трехмерного массива Sin(ƒr,tx,nRG) дальностных спектров ЦРГ, поступившего на первый вход первого блока умножения (8) с выхода второго блока БПФ вдоль быстрого времени tr (7), поэлементно умножают на двумерный массив SRMFreƒ (ƒr,tx) опорных спектров дальностных СФ для всех используемых зондирующих радиоимпульсов, поступивший на второй вход рассматриваемого первого блока умножения (8) с выхода первого блока БПФ вдоль быстрого времени tr (2). Получают при этом трехмерный массив SRC (ƒr, tx, nRG) дальностных спектров сжатой по дальности ЦРГ, который подают на выход рассматриваемого первого блока умножения (8).
С выхода первого блока умножения (8) трехмерный массив SRC(ƒr, tx, nRG) дальностных спектров сжатой по дальности ЦРГ подается в ресемплинговый блок коррекции периода дискретизации азимутальных сигналов (20). В данном блоке выполняют коррекцию периода дискретизации содержащихся в строках данного массива азимутальных сигналов путем ресемплинга отсчетов данного массива вдоль медленного времени tx, то есть вдоль строк, например, при помощи интерполяционного многочлена Лагранжа по формулам (8) и (9). В результате чего получают отсчеты, взятые с равномерным периодом дискретизации на оси медленного времени tx, которые записывают в тот же трехмерный массив SRC(ƒr,tx,nRG) дальностных спектров сжатой по дальности ЦРГ, который в свою очередь подают на выход рассматриваемого блока (20) для дальнейшего выполнения БПФ вдоль медленного времени tx.
Трехмерный массив SRC (ƒr,tx,nRG) дальностных спектров сжатой по дальности ЦРГ с выхода блока коррекции периода дискретизации азимутальных сигналов (20), выполняющего ресемплинг вдоль медленного времени tx отсчетов трехмерного массива дальностных спектров сжатой по дальности ЦРГ, поступает на вход первого блока БПФ вдоль медленного времени tx (9), в котором выполняют БПФ вдоль медленного времени tx от указанного входного массива, получают при этом трехмерный массив SRC(ƒr,ƒx,nRG) двумерных спектров сжатой по дальности ЦРГ, который подают на выход рассматриваемого блока (9) и далее, - на первый вход второго блока умножения (12) и на первый вход четвертого блока умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr (23).
В блоке расчета трехмерного массива импульсных характеристик азимутального СФ (10) по формулам (2)…(5) рассчитывают трехмерный массив SAMFreƒ(ƒr,tx,nRG) импульсных характеристик азимутального СФ, который подают на выход рассматриваемого блока (10), подключенный ко входу второго блока БПФ вдоль медленного времени tx (11).
Во втором блоке БПФ вдоль медленного времени tx (11) выполняют построчно БПФ вдоль медленного времени tx от поступившего на вход данного блока трехмерного массива SAMFreƒ(ƒr,tx,nRG) импульсных характеристик азимутального СФ. Получают при этом трехмерный массив SAMFreƒ(ƒr,ƒx,nRG) опорных двумерных спектров азимутального СФ, который подают на выход рассматриваемого блока (11), подключенный ко второму входу второго блока умножения (12).
Во втором блоке умножения (12) поэлементно умножают поступивший по первому входу трехмерный массив SRC(ƒr,ƒx,nRG) двумерных спектров сжатой по дальности ЦРГ, на поступивший по второму выходу трехмерный массив SAMFreƒ(ƒr,ƒx,nRG) опорных двумерных спектров азимутального СФ. Получают при этом трехмерный массив SAMFout(ƒr,ƒx,nRG) двумерных спектров выходного сигнала азимутального СФ, который подают на выход рассматриваемого блока (12), подключенный ко входу первого блока обратного БПФ вдоль частоты ƒr (13).
В первом блоке обратного БПФ вдоль частоты ƒr (13) выполняют постолбцовое обратное БПФ вдоль частоты ƒr поступившего на вход трехмерного массива SAMFout(ƒr,ƒx,nRG) двумерных спектров выходного сигнала азимутального СФ. Получают при этом трехмерный массив SAMFout(tr,ƒx,nRG) азимутальных спектров выходного сигнала азимутального СФ, который подают на выход рассматриваемого блока (13), подключенный ко входу первого блока объединения групп элементов дальности (14).
В первом блоке объединения групп элементов дальности (14) страницы поступившего на вход трехмерного массива SAMFout(tr,ƒx,nRG) азимутальных спектров выходного сигнала азимутального СФ выстраивают вдоль первой размерности - быстрого времени tr. Получают при этом двумерный массив SAMFout(tr,ƒx) азимутальных спектров выходного сигнала азимутального СФ, который подают на выход рассматриваемого блока (14), подключенный к первому входу третьего блока умножения (16).
В блоке расчета корректирующих функций (15) по формуле (6) рассчитывают двумерный массив Scorr(tr,ƒx) корректирующих функций, который подают на выход рассматриваемого блока (15), подключенный ко второму входу третьего блока умножения (16), а также ко второму входу пятого блока умножения (26).
В третьем блоке умножения (16) поступивший по первому входу двумерный массив SAMFout(tr,ƒx) азимутальных спектров выходного сигнала азимутального СФ построчно умножают на поступивший по второму входу двумерный массив Scorr(tr,ƒx) корректирующих функций. Получают при этом двумерный массив SAMFoutcorr(tr,ƒx) скорректированных азимутальных спектров, который подают на выход рассматриваемого блока (16), подключенный ко входу первого блока обратного БПФ вдоль частоты ƒx (17).
В первом блоке обратного БПФ вдоль частоты ƒx (17) вычисляют построчно обратное БПФ вдоль частоты ƒx от поступившего на вход данного блока двумерного массива SAMFoutcorr(tr,ƒx) скорректированных азимутальных спектров. Получают при этом двумерный массив URLI(tr,tx) комплексных отсчетов радиолокационного изображения (РЛИ) подстилающей поверхности, который подают на выход рассматриваемого блока (17), подключенный ко входу первого блока вычисления амплитуд (18).
В первом блоке вычисления амплитуд (18) по формуле (7) вычисляют амплитуды комплексных отсчетов поступившего на вход данного блока двумерного массива URLI(tr,tx) комплексных отсчетов РЛИ подстилающей поверхности. Получают при этом двумерный массив пикселей РЛИ подстилающей поверхности IRLI(tr,tx), который подают на выход рассматриваемого блока (18), подключенный ко входу индикатора РЛИ подстилающей поверхности (19).
На индикаторе РЛИ подстилающей поверхности (19) отображают поступивший на вход указанного индикатора двумерный массив IRLI(tr,tx) пикселей РЛИ подстилающей поверхности в виде пикселей на плоскости «азимутальная координата х - наклонная дальность r» с уровнем яркости, определяемым значением соответствующего элемента в массиве IRLI(tr,tx).
В блоке расчета четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr (21) рассчитывают по формуле (10) четырехмерный массив SAMFreƒ(ƒr,tx,nRG,Vr) импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr, который подают на выход рассматриваемого блока (21), подключенный ко входу третьего блока построчного БПФ вдоль медленного времени tx четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr (22).
Значения радиальной скорости Vr обнаруживаемых ДЦ в формуле (10) берут из диапазона Vr min … Vr max, где Vr min и Vr max - соответственно минимальная и максимальная радиальные скорости обнаруживаемых ДЦ, с дискретом

где  - коэффициент перекрытия по радиальной скорости;
- коэффициент перекрытия по радиальной скорости;
DA - размер антенны радиолокатора вдоль линии пути (вдоль оси х).
В третьем блоке построчного БПФ вдоль медленного времени tx четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr (22) выполняют построчно БПФ вдоль медленного времени tx четырехмерного массива SAMFreƒ(ƒr,tx,nRG,Vr) импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr. Получают при этом четырехмерный массив SAMFreƒ(ƒr,ƒx,nRG,Vr) опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr, который подают на выход рассматриваемого блока (22), подключенный ко второму входу четвертого блока умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr (23).
В четвертом блоке умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr (23) умножают поступивший по первому входу трехмерный массив двумерных спектров сжатой по дальности ЦРГ SRC(ƒr,ƒx,nRG) на все трехмерные подмассивы поступившего по второму входу четырехмерного массива SAMFreƒ (ƒr,ƒx,nRG,Vr) опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr. Получают при этом четырехмерный массив SAMFout(ƒr,ƒx,nRG,Vr) двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, который подают на выход рассматриваемого блока (23), подключенный ко входу второго блока обратного БПФ вдоль частоты ƒr четырехмерного массива двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr (24).
Во втором блоке обратного БПФ вдоль частоты ƒr четырехмерного массива двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr (24) выполняют постолбцовое обратное БПФ вдоль частоты ƒr четырехмерного массива SAMFout(ƒr,ƒx,nRG,Vr) двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr. Получают при этом четырехмерный массив SAMFout(tr,ƒx,nRG,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, который подают на выход рассматриваемого блока (24), подключенный ко входу второго блока объединения групп элементов дальности (25).
Во втором блоке объединения групп элементов дальности (25) в каждом трехмерном подмассиве четырехмерного массива SAMFout(tr,ƒx,nRG,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr страницы выстраивают и объединяют вдоль первой размерности - быстрого времени tr, исключая таким образом третью размерность в массиве SAMFout(tr,ƒx,nRG,Vr). Получают при этом набор страниц, образующий трехмерный массив SAMFout(tr,ƒx,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, который подают на выход рассматриваемого блока (25), подключенный к первому входу пятого блока умножения (26). Протяженность полученного трехмерного массива SAMFout(tr,ƒx,Vr} вдоль первой размерности соответствует ширине всей полосы съемки.
В пятом блоке умножения (26) каждую страницу поступившего по первому входу трехмерного массива SAMFout(tr,ƒx,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr поэлементно умножают на поступивший по второму входу двумерный массив Scorr(tr,ƒx) корректирующих функций. Получают при этом трехмерный массив SAMFoutcorr(tr,ƒx,Vr) скорректированных азимутальных спектров для всех значений радиальной скорости Vr, который подают на выход рассматриваемого блока (26), подключенный к первому входу шестого блока умножения (28).
В блоке расчета корректирующих по азимутальной скорости Vx функций (27) рассчитывают по формуле (11) трехмерный массив ScorrVx(tr,ƒx,Vx) корректирующих по азимутальной скорости Vx функций, который подают на выход рассматриваемого блока (27), подключенный ко второму входу шестого блока умножения (28).
Значения азимутальной скорости Vx обнаруживаемых ДЦ в формуле (11) берут из диапазона Vx min … Vx max, где Vx min и Vx max - соответственно минимальная и максимальная азимутальные скорости обнаруживаемых ДЦ, с дискретом

где  - коэффициент перекрытия по азимутальной скорости.
- коэффициент перекрытия по азимутальной скорости.
В шестом блоке умножения (28) каждую страницу поступившего по первому входу трехмерного массива SAMFoutcorr(tr,ƒx,Vr) скорректированных азимутальных спектров для всех значений радиальной скорости Vr поэлементно умножают на все страницы поступившего по второму входу трехмерного массива ScorrVx(tr,ƒx,Vx} корректирующих по азимутальной скорости Vx функций. Полученные при этом для каждого значения Vr трехмерные подмассивы, выстроенные вдоль четвертой размерности - радиальной скорости Vr, образуют четырехмерный массив SAMFoutcorrVx(tr,ƒx,Vx,Vr) скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr, в котором третья размерность соответствует азимутальной скорости Vx, а четвертая - радиальной скорости Vr. Полученный массив подают на выход рассматриваемого блока (28), подключенный ко входу второго блока построчного обратного БПФ вдоль частоты ƒx четырехмерного массива скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr (29).
Во втором блоке построчного обратного БПФ вдоль частоты ƒx четырехмерного массива скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr (29) вычисляют построчно обратное БПФ вдоль частоты ƒx четырехмерного массива SAMFoutcorrVx(tr,ƒx,Vx,Vr) скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr. Получают при этом четырехмерный массив URLI(tr,tx,Vx,Vr) комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr, который подают на выход рассматриваемого блока (29), подключенный ко входу второго блока вычисления амплитуд комплексных отсчетов четырехмерного массива комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr (30).
Во втором блоке вычисления амплитуд комплексных отсчетов четырехмерного массива комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr (30) по формуле (12) вычисляют амплитуды комплексных отсчетов четырехмерного массива URLI(tr,tx,Vx,Vr) комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr. Получают при этом четырехмерный массив IRLI(tr,tx,Vx,Vr) пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr, который подают на выход рассматриваемого блока (30), подключенный:
- ко входу блока вычисления четырехмерного массива общих порогов (31);
- ко входу блока вычисления четырехмерного массива местных порогов (32);
- ко входу блока вычисления четырехмерного массива максимумов соседних элементов (33);
- к первому входу блока компаратора (35);
- к первому входу седьмого блока умножения (36).
В блоке вычисления четырехмерного массива общих порогов (31) вычисляют, например, по формулам (13) или (14), четырехмерный массив UGTh(tr,tx,Vx,Vr) общих порогов, который подают на выход рассматриваемого блока (31), подключенный к первому входу блока вычисления четырехмерного массива максимальных порогов (34).
В блоке вычисления четырехмерного массива местных порогов (32) вычисляют четырехмерный массив ULTh(tr,tx,Vx,Vr) местных порогов например, для каждого значения массива по формулам (15)…(17). Полученный четырехмерный массив ULTh(tr,tx,Vx,Vr) местных порогов подают на выход рассматриваемого блока (32), подключенный ко второму входу блока вычисления четырехмерного массива максимальных порогов (34).
В блоке вычисления четырехмерного массива максимумов соседних элементов (33) по формулам (18)…(23) вычисляют четырехмерный массив UNMTh(tr,tx,Vx,Vr) максимумов соседних элементов, который подают на выход рассматриваемого блока (33), подключенный к третьему входу блока вычисления четырехмерного массива максимальных порогов (34).
В блоке вычисления четырехмерного массива максимальных порогов (34) вычисляют по формуле (24) четырехмерный массив UMTh(tr,tx,Vx,Vr) максимальных порогов, который подают на выход рассматриваемого блока (34), подключенный ко второму входу блока компаратора (35).
В блоке компаратора (35) сравнивают значения элементов поступившего по первому входу четырехмерного массива IRLI (tr,tx,Vx,Vr) пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с соответствующими значениями поступившего по второму входу четырехмерного массива UMTh(tr,tx,Vx,Vr) максимальных порогов. При этом по формуле (25) формируют четырехмерный массив UMTD(tr,tx,Vx,Vr) сигналов обнаружения ДЦ, который подают на выход рассматриваемого блока (35), подключенный ко второму входу седьмого блока умножения (36).
Расчет четырехмерных массивов порогов UGTh(tr,tx,Vx,Vr), ULTh (tr, tx, Vx, Vr), UNMTh (tr,tx,Vx,Vr), UMTh(tr,tx,Vx,Vr), производимый по формулам (13)…(24), может осуществляться и по другим формулам, известным из уровня техники [66].
В седьмом блоке умножения (36) по формуле (26) поэлементно умножают элементы поступившего по первому входу четырехмерного массива IRLI(tr,tx,Vx,Vr) пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы поступившего по второму входу четырехмерного массива UMTD(tr,г,tx,Vx,Vr) сигналов обнаружения ДЦ, получают при этом четырехмерный массив IMT(tr,tx,Vx,Vr) пикселей РЛИ обнаруженных ДЦ, который подают на выход рассматриваемого блока (36), подключенный ко входу блока вычисления максимальных значений четырехмерного массива пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей (37).
В блоке вычисления максимальных значений четырехмерного массива пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей (37) по формуле (27) вычисляют максимальные значения четырехмерного массива IMT(tr,tx,Vx,Vr) пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей. Получают при этом двумерный массив IMT(tr,tx) пикселей РЛИ обнаруженных ДЦ, который подают на выход рассматриваемого блока (37), подключенный ко входу индикатора ДЦ (38).
На индикаторе ДЦ (38) отображают двумерный массив пикселей РЛИ обнаруженных ДЦ IMT(tr,tx) в виде пикселей на плоскости «азимутальная координата х - наклонная дальность r» с уровнем яркости, определяемым значением соответствующего элемента в массиве IMT(tr,tx).
Примененный в настоящем изобретении математический аппарат использует одномерные, двумерные, трехмерные и четырехмерные массивы. Данный математический аппарат широко применяется в различных программных системах компьютерной математики, например, в MATLAB [10, 69…71]. Одномерные массивы представляют собой столбцы, либо строки. Двумерные массивы представляют собой матрицы, содержащие столбцы и строки, причем индекс элемента матрицы вдоль первой размерности отсчитывается вдоль столбца, а индекс элемента матрицы вдоль второй размерности - вдоль строки. Трехмерный массив состоит из матриц-страниц. Номер страницы является индексом элемента массива вдоль третьей размерности. Четырехмерный массив состоит из трехмерных подмассивов. Номер трехмерного подмассива в четырехмерном массиве является индексом элемента массива вдоль четвертой размерности. Во всех формулах и блоках заявленного изобретения, если не оговорено иначе, операции с одномерными и многомерными массивами осуществляются поэлементно. Матричные операции, такие как матричное умножение матрицы на матрицу, столбца на матрицу, матрицы на столбец, не используются. Индексация элементов многомерных массивов производится в порядке возрастания номера размерности, от младшей первой размерности к старшим (второй, третьей, четвертой, и т.д.) размерностям. Так, например, в четырехмерном массиве M(i,j,k,m) i - номер элемента в столбце, j - номер столбца в матрице-странице, k - номер матрицы-страницы в трехмерном подмассиве, m - номер трехмерного подмассива в четырехмерном массиве.
Практическая реализация заявленных способа радиолокационной съемки Земли и околоземного пространства и радиолокатора с синтезированной апертурой антенны для его реализации возможна на основе известных из уровня техники высокочастотных, аналого-цифровых, цифровых и вычислительных узлов, модулей, блоков приборов и систем [72…95].
Цифровой формирователь зондирующего радиосигнала (3), фиг. 3, может быть реализован на программируемой логической интегральной схеме (ПЛИС) [75…78]. Аналого-цифровая приемо-передающая антенно-усилительная система (4), фиг. 3, - с использованием высокочастотных, аналоговых, аналого-цифровых и цифровых компонентов: ПЛИС, цифро-аналоговых и аналого-цифровых преобразователей, радиочастотных смесителей, квадратурных модуляторов и демодуляторов, радиочастотных усилителей, радиочастотных переключателей, циркуляторов, радиочастотных фильтров, антенных элементов и других компонентов [54…67, 72…78]. Все остальные блоки 1, 2, 5…38 радиолокатора (фиг. 3) - на промышленном компьютере (кластере, сервере или рабочей станции) [79, 80] с графическими ускорителями (Graphics Processing Unit, - GPU) на основе «архитектуры вычислительных унифицированных устройств» CUDA (Compute Unified Device Architecture, - CUDA) [80…95].
В ходе работ по практическому подтверждению работоспособности заявленных способа радиолокационной съемки и радиолокатора с синтезированной апертурой антенны было проведено численное моделирование их работы. Моделирование осуществлялось на рабочей станции с графическими ускорителями (CUDA GPU) в системе MATLAB [69…71]. В ходе моделирования в полосе съемки размещались ТО с различными скоростями. Так, на фиг. 10. приведено расположение ТО в полосе съемки на плоскости «азимут х - наклонная дальность r», и указаны азимутальные (VxTO) и радиальные (VrTO) скорости их движения. Первый ТО (левый нижний на графике) - неподвижный, остальные имеют азимутальные скорости от 125 до 325 м/с. Размещенные ТО облучались зондирующим радиосигналом, отраженные от ТО радиосигналы принимались и образовывали ЦРГ, которая затем обрабатывалась изобретенным способом в изобретенном радиолокаторе, фиг. 3. Для обнаружения ДЦ задавался диапазон азимутальных скоростей VxTO=200…250 м/с. ДЦ, движущиеся со скоростями из этого диапазона, должны были обнаруживаться, а ДЦ, движущиеся с другими скоростями, выходящими за пределы данного диапазона, - нет. В результате обработки формировались показанное на фиг. 11 РЛИ, отображаемое на картографическом индикаторе РЛИ подстилающей поверхности (19), и представленные на фиг. 12 отображаемые на индикаторе ДЦ (38) отметки движущихся ТО, обнаруженных в заданном диапазоне скоростей. На указанных фигурах nx - номер элемента разрешения по азимуту nr - номер элемента разрешения по наклонной дальности. Из фиг. 11 видно, что на индикаторе (19) острый отклик дает лишь первый, неподвижный ТО. Отклики остальных, движущихся по азимуту ТО размыты по азимуту и существенно ниже по уровню. Это подтверждает недостаток классического «Omega-k» алгоритма (прототип, фиг. 2) при обнаружении ДЦ. Однако на индикаторе ДЦ (38), фиг. 12, уже можно видеть четкие отметки трех движущихся ТО, азимутальные скорости которых попадают в заданный диапазон скоростей VxTO=200…250 м/с. Полученный результат практически подтверждает работоспособность заявленных способа радиолокационной съемки и радиолокатора с синтезированной апертурой антенны.
Отлаженные в ходе моделирования программные блоки и функции MATLAB могут быть напрямую использованы при реализации блоков 1, 2, 5…38 заявленного радиолокатора.
Источники информации
1. David K. Barton, Sergey A. Leonov. Radar technology encyclopedia. - Artech House, Boston, London, 1998.
2. Неронский Л.Б., Михайлов В.Ф., Брагин И.В. Микроволновая аппаратура дистанционного зондирования поверхности Земли и атмосферы. Радиолокаторы с синтезированной апертурой антенны / Учебное пособие / СПбГУАП. СПб., 1999. Ч.2. 220 с.: ил.
3. Леонов С.А. Радиолокационные средства противовоздушной обороны. - М.: Воениздат, 1988. - 180 с.: ил.
4. Cecil William Farrow. Interpolator for and method of interpolating digital samples. Patent EP 0327268 B1.
5. Cecil William Farrow, "A continuously variable digital delay element," in Proc. IEEE Int. Symp. Circuits and Systems, Espoo, Finland, June 1988, vol. 3, pp. 2641-2645.
6. Ewa Hermanowicz. Weighted Lagrangian interpolating FIR filter. - 8th European Signal Processing Conference (EUSIPCO 1996).
7. V. Valimaki and T.I. Laakso, "Principles of Fractional Delay Filters", - IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP’00), Istanbul, Turkey, 5-9 June 2000.
8. Ewa Hermanowicz. On designing a wideband fractional delay filter using the Farrow approach. - 12th European Signal Processing Conference, 2004.
9. Jeffrey P. Long, Jose A. Torres. High Throughput Farrow Re-samplers Utilizing Reduced Complexity FIR Filters. - 2012 IEEE Military Communications Conference, 29 Oct.-1 Nov. 2012.
10. Michalowski T. Applications of MATLAB in Science and Engineering. - 2nd Edition. - ITexLi, 2017.
11. Бахвалов H.C., Жидков Н.П., Кобельков Г.М. Численные методы. 6-е изд. - М.: БИНОМ. Лаборатория знаний, 2008.
12. Шарый. Курс вычислительных методов. - Новосибирск, Институт вычислительных технологий СО РАН, 2018.
13. Радиолокационные системы землеобзора космического базирования. Под ред. В.С. Вербы. - М.: Радиотехника, 2010. - 680 с.: ил.
14. Верба B.C. Обнаружение наземных объектов. Радиолокационные системы обнаружения и наведения воздушного базирования. - М.: Радиотехника, 2007. - 360 с.: ил.
15. Неронский Л.Б., Осипов И.Г., Верба B.C. Моделирование метода пространственно-частотной фильтрации для селекции движущихся целей в РСА // Труды XXII Всероссийского симпозиума "Радиолокационное исследование природных сред". Вып. 4. Изд-во Полиграфический центр Автономной некоммерческой организации. Секция "Инженерные проблемы стабильности и конверсии" Российской инженерной академии (СИП РИА). М., 2005. С. 7-15.
16. Neronskiy L., Osipov I., Verba V. Modelling of Space-Frequency Filtering Method for Moving Target Indication in SAR // Proc. of EUSAR’2006, Dresden, Germany. June 16-18 2006
17. J.R. Bennett and I.G. Cumming, "A Digital Processor for the Production of SEASAT Synthetic Aperture Radar Imagery", SURGE Work-shop, 1979
18. I.G. Cumming and J.R. Bennett, "Digital Processing of SEASAT SAR Data", IEEE International Conference on Acoustics, Speech and Signal Processing, Washington, D.C., 1979.
19. A.M. Smith, "A New Approach to Range Doppler SAR Processing", International Journal of Remote Sensing, vol. 12(2), pp. 235-251, 1991.
20. R. Bamler, "A Systematic Comparison Of SAR Focusing Algorithms", International Geoscience and Remote Sensing Symposium, IGARSS, vol. 2, pp. 1005-1009, 1991.
21. R. Bamler, "A Comparison of Range-Doppler and Wavenumber Domain SAR Focusing Algorithms", IEEE Transactions on Geoscience and Remote Sensing, vol. 30(4), pp. 706-713, 1992.
22. Ian G. Cumming, Frank H. Wong. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation, 1st ed. Artech House Publishers, Boston, London, 2005.
23. Dan Wang, Murtaza Ali. Synthetic Aperture Radar on low power multi-core Digital Signal Processor. - Waltham, MA, USA, 2012 IEEE Conference on High Performance Extreme Computing
24. Wang D., Ali M., Blinka E. Synthetic Aperture Radar (SAR) Implementation on a TMS320C6678 Multicore DSP. SPRY276. - Texas, Dallas: Texas Instruments Incorporated, 2015.
25. Радиолокационные системы воздушной разведки, дешифрование радиолокационных изображений: учебник для курсантов ВВИА имени профессора Н.Е. Жуковского. Под ред. Л.А. Школьного. - М.: изд. ВВИА им. Проф. Н.Е.Жуковского, 2008.
26. Stolt R.H. Migration by Fourier transform. - Geophysics, vol. 43, no. 1 (february 1978); P. 23-48, 26 figs.
27. Claudio Prati, Fabio Rocca, Andrea Monti Guarnieri, Elvio Damonti. Seismic migration for SAR focusing: Intereferometrical Applications. - IEEE Transactions on geoscience and remote sensing, vol. 28, no. 4, July 1990.
28. Cafforio C., Prati C., Rocca E. SAR data focusing using seismic migration techniques. - IEEE Transactions on Aerospace and Electronic Systems, vol. 27, no. 2, March 1991.
29. Richard Bamler. A Comparison of Range-Doppler and Wavenumber Domain SAR Focusing Algorithms. - IEEE Transactions on Geoscience and Remote Sensing, Vol. 30, No. 4, July 1992.
30. David W. Hawkins. Synthetic Aperture Imaging Algorithms: with application to wide bandwidth sonar. - A thesis presented for the degree of Doctor of Philosophy in Electrical and Electronic Engineering at the University of Canterbury, Christchurch, New Zealand, October 1996.
31. Цветков O.E. Алгоритмы обработки сигналов в РСА с миграцией по каналам дальности. Цифровая обработка сигналов в РСА. Сборник научных статей. Под ред. Толстова Е.Ф. - Военная академия войсковой ПВО вооруженных сил РФ, Смоленск, 2005.
32. Weinberg Graham. Radar Detection Theory of Sliding Window Processes. - CRC Press, 2017. - 401 p.
33. Белецкий Ю.С. Методы и алгоритмы контрастного обнаружения сигналов на фоне помех с априори неизвестными характеристиками. Монография. - М.: «Радиотехника», 2011.
34. Вакман Д.Е. Сложные сигналы и принцип неопределенности в радиолокации. - Москва, «Советское радио», 1965.
35. Варакин Л.Е. Теория сложных сигналов. - Москва, «Советское радио», 1970.
36. Кук Ч., Бернфельд М. Радиолокационные сигналы. Пер. с английского под ред. В.С. Кельзона. - Москва, «Советское радио», 1971.
37. Вакман Д.Е., Седлецкий P.M. Вопросы синтеза радиолокационных сигналов. - Москва, «Советское радио», 1973.
38. Ипатов. Периодические дискретные сигналы с оптимальными корреляционными свойствами. 1992.
39. Levanov N., Mozeson Е. Radar Signals. - Hoboken, New Jersey, John Wiley & Sons, Inc., 2004.
40. Гантмахер B.E., Быстров H.E., Чеботарев Д.В. Шумоподобные сигналы. - СПб.: Наука и Техника, 2005.
41. Golomb S.W., Gong G. Signal Desing for Good Correlation. - Cambridge University Press, 2005.
42. An M., Brodzik A.K., Tolimieri R. Ideal Sequence Design in Time-Frequency Space. Applications to Radar, Sonar, and Communication Systems. - 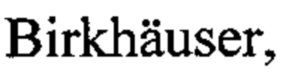 2009.
2009.
43. Потехин E.H. Синтез и анализ оптимальных бинарных последовательностей. Диссертация на соискание ученой степени кандидата физико-математических наук по специальности 05.13.17 (Теоретические основы информатики). - Йошкар-Ола, ПГТУ, 2014.
44. Бодров О.А. Стинтез фазо- и частотноманипулированных сигналов в радиотехнических системах. - М.: Горячая линия - Телеком, 2016.
45. Golomb S.W. Shift Register Sequences. Secure and Limited-Access Code Generators, Efficiency Code Generators, Prescribed Property Generators, Mathematical Models. 3rd revised edition. - Singapore: World Scientific, 2017.
46. Чапурский B.B. Избранные задачи теории сверхширокополосных радиолокационных систем. 3-е изд., испр. - Москва: Издательство МГТУ им. Н.Э. Баумана, 2017.
47. Crawford J.A. Frequency Synthesizer Design Handbook. - New York: Artech House, 1994. - 456 p.
48. Ридико Л.И. DDS: прямой цифровой синтез частоты - Компоненты и технологии, №7, №8 2001.
49. Ямпурин Н.П., Болознев В.В., Сафонова Е.В., Жалнин Е.Б. Формирование прецизионных частот и сигналов. - Нижний Новгород, Нижегород. гос. техн. ун-т, 2003.
50. Белов Л. Синтезаторы стабильных частот. - Электроника: Наука, Технология, Бизнес, №3 2004.
51. Steven Eugene Turner, Richard Т. Chan and Jeffrey T. Feng. ROM-Based Direct Digital Synthesizer at 24 GHz Clock Frequency in InP DHBT Technology. - IEEE Microwave and Wireless Components Letters, vol. 18, No. 8, August 2008.
52. Chenakin A. Frequency Synthesizers: From Concept to Product. - New York: Artech House, 2010. - 305 p.
53. Gaopeng Chen, Danyu Wu, Zhi Jin, Jin Wu and Xinyu Liu. A 10GHz 8-bit Direct Digital Synthesizer implemented in GaAs HBT technology. - 2010 IEEE Radio Frequency Integrated Circuits Symposium, pp. 425-428.
54. Lo Y.T., Lee S.W. Antenna Handbook. Theory, Applications, and Design. - New York, Springer Science + Business Media, LLC, 1988.
55. Воскресенский Д.И., Гостюхин В.Л., Максимов В.М., Пономарев Л.И. Устройства СВЧ и антенны / Под ред. Д.И. Воскресенского. Изд. 2-е, доп. и перераб. - М.: Радиотехника, 2006.
56. Allen В., Dohler М., Okon Е.Е., Malik W.Q., Brown А.К., Edwards D.J. Ultra-wideband Antennas and Propagation for Communications, Radar and Imaging. - John Wiley & Sons Ltd, 2007.
57. Constantine A.Balanis. Antenna Theory. Analysis and Design. Fourth edition. - John Wiley & Sons, Inc., Hoboken, New Jersey, 2016.
58. Chen Z.N., Liu D., Nakano H., Qing X., Zwick Th. (Eds.) Handbook of Antenna Technologies (4 Volume Set). - Springer Science+Business Media, Singapore, 2016. - 3470 p.
59. Лайонс P. Цифровая обработка сигналов: Второе издание. Пер. с англ. - М.: ООО "Бином-Пресс", 2006.
60. Van Trees H.L. Detection, Estimation, and Modulation Theory. Part 4. Optimum Array Processing. - John Wiley, 2002. - 1470 p.
61. Устройства СВЧ и антенны. Проектирование фазированных антенных решеток: Учеб. пособие для вузов / Под ред. Д.И. Воскресенского. Изд. 4-е, перераб. и доп. - М.: Радиотехника, 2012, - 744 с.: ил.
62. Хансен Р.С. Фазированные антенные решетки. Второе издание. - Москва: Техносфера, 2012.
63. Григорьев Л.Н. Цифровое формирование диаграммы направленности в фазированных антенных решетках. - М.: Радиотехника, 2010.
64. Воскресенский Д.И., Овчинникова Е.В., Шмачилин П.А. Бортовые цифровые антенные решетки и их элементы / Под ред. Д.И. Воскресенского. - М.: Радиотехника, 2013.
65. Добычина Е.М., Кольцов Ю.В. Цифровые антенные решетки в бортовых радиолокационных системах. - М.: Изд-во МАИ, 2013.
66. Пономарев Л.И., Вечтомов В.А., Милосердов А.С. Бортовые цифровые многолучевые антенные решетки для систем спутниковой связи / под ред. Л.И. Пономарева. - Москва: Издательство МГТУ им. Н.Э. Баумана, 2016.
67. Fischer R.F.H. Precoding and Signal Shaping for Digital Transmission. - Springer, 2002. - 507 p.
68. Джузеппе А. Фабрицио. Высокочастотный загоризонтный радар: основополагающие принципы, обработка сигналов и практическое применение. - Москва: Техносфера, 2018.
69. Ануфриев И.Е., Смирнов А.Б., Смирнова Е.Н. MATLAB 7. - СПб.: БХВ-Петербург, 2005.
70. Дьяконов В.П. MATLAB. Полный самоучитель. - М.: ДМК Пресс, 2012.
71. MATLAB Mathematics. - The Math Works, Inc. 2017.
72. Chang K. Encyclopedia of RF and Microwave Engineering. - Wiley-Interscience, 2005. - 5832 p.
73. Weiner M.M. Adaptive Antennas and Receivers. - CRC Press, 2006. - 1206 p.
74. Tsui James, Cheng Chi-Hao. Digital Techniques for Wideband Receivers. 3rd Ed. - SciTech Publishing, 2017. - 610 p.
75. http://www.xilinx.com
76. https://www.intel.com
77. Rodger H. Hosking. Putting FPGAs to Work in Software Radio Systems. Seven Edition. - Pentec, Inc., 2013.
78. Vanderbauwhede W., Benkrid K. High-Performance Computing Using FPGAs. - Springer, 2014. - 803 p.
79. Antonopoulos N., Gillam L. Cloud Computing. Principles, Systems and Applications. - Springer, 2010.
80. http://www.nvidia.com
81. Chapman B. et al. Parallel Computing: From Multicores and GPU's to Petascale. - IOS Press, 2010. - 761 p.
82. Jimmy Pettersson, Ian Wainwright. Radar Signal Processing with Graphics Processors (GPUs). Company Unclassified Master Thesis. - SAAB, 2010.
83. Hwu W.W. GPU Computing Gems: Emerald Edition. - Morgan Kaufmann, 2011. - 886 p.
84. Hwu W.W. GPU Computing Gems Jade Edition. - Applications of GPU Computing Series. - Morgan Kaufmann, 2011. - 560 p.
85. Jakub Kurzak, David A. Bader, Jack Dongarra. Scientific Computing with Multicore and Accelerators. - CRC Press, Taylor & Francis Group, 2011.
86. David B. Kirk, Wen-mei W. Hwu. Programming massively parallel processors. A Hand-on Approach. Second Edition. - Elsevier Inc., 2013.
87. Cook Shane. CUDA Programming: A Developer's Guide to Parallel Computing with GPUs. - Morgan Kaufmann, 2013. - 600 p.
88. Wilt N. The CUDA handbook. A Comprehensive Guide to GPU Programming. - Pearson Education, Inc. 2013. - 522 p.
89. Suh J.W., Kim Y. Accelerating MATLAB with GPU Computing: A Primer with Examples. - Morgan Kaufmann, 2014. - 247 p.
90. Rose Chris. CUDA Succinctly. - Morrisville, Syncfusion Inc, 2014.
91. John Cheng, Max Grossman, Ту McKercher. Professional CUDA С Programming. - John Wiley & Sons, Inc., 2014.
92. Ploskas N., Samaras N. GPU Programming in MATLAB. - Morgan Kaufmann, 2016. - 320 p.
93. Некрасов К.A., Поташников С.И., Боярченков А.С., Купряжкин А.Я. Параллельные вычисления общего назначения на графических процессорах: учебное пособие. - Екатеринбург: Изд-во Урал, ун-та, 2016.
94. Hamid Sarbazi-Azad. Advances in GPU Research and Practice. - Morgan Kaufmann, 2017.
95. Soyata T. GPU Parallel Program Development Using CUDA. - New York: Chapman and Hall/CRC, 2018. - 477 p.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2022 |
|
RU2801361C1 |
| Способ определения высоты рельефа местности радиолокатором с синтезированной апертурой антенны | 2019 |
|
RU2707556C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДЕТАЛЬНЫХ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2018 |
|
RU2710961C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ В РАДИОЛОКАЦИОННОЙ СТАНЦИИ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2012 |
|
RU2511216C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| Способ формирования изображения поверхности в бортовой радиолокационной станции с синтезированием апертуры антенны с электронным управлением лучом | 2016 |
|
RU2617116C1 |
| Способ формирования изображения земной поверхности в радиолокационной станции с синтезированием апертуры антенны | 2016 |
|
RU2614041C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ С ПРЕДВАРИТЕЛЬНОЙ ФОКУСИРОВКОЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2792964C2 |
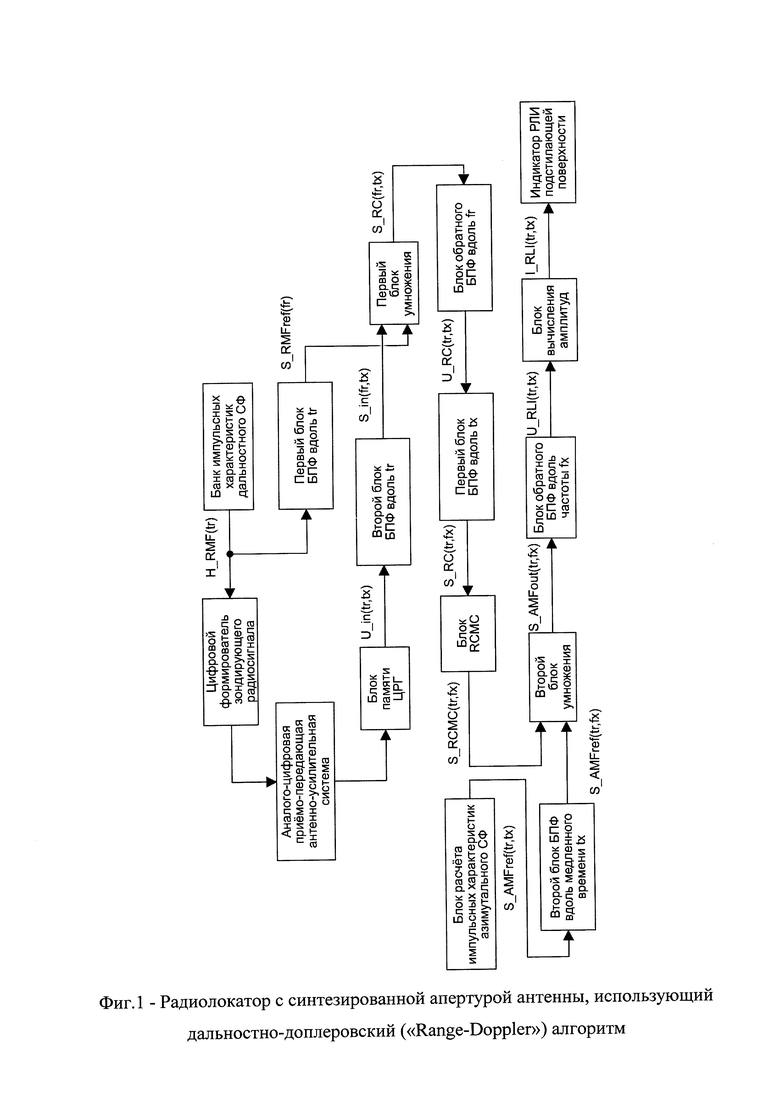
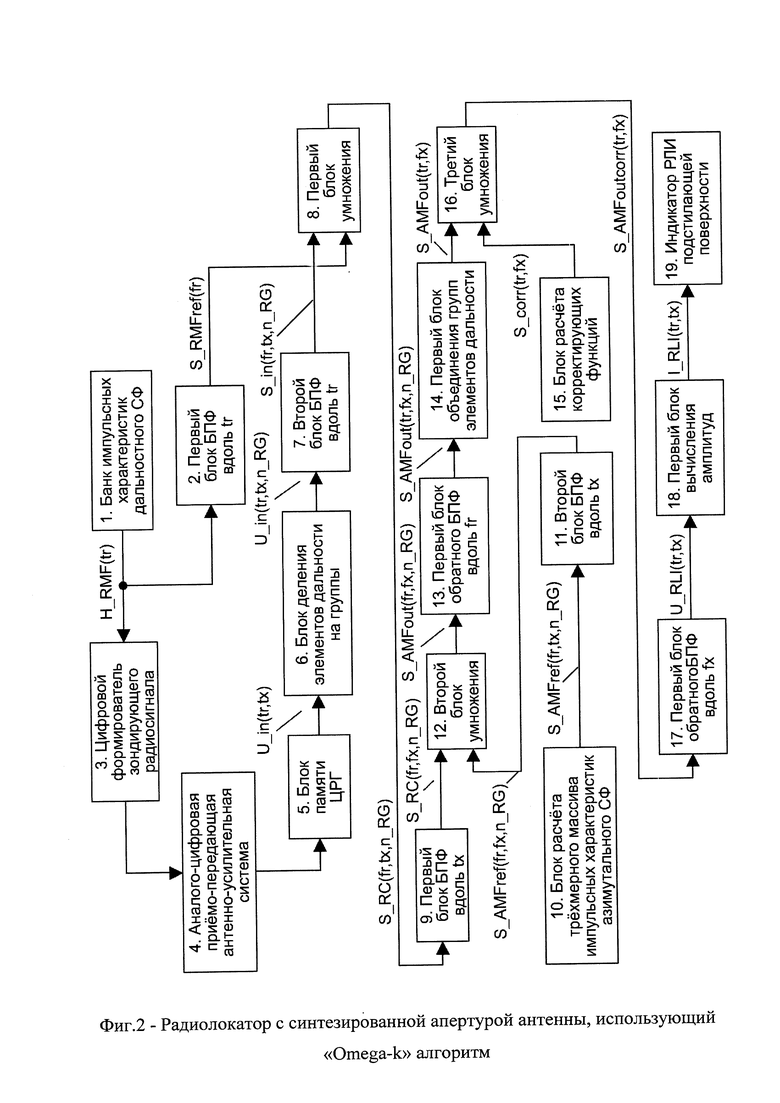
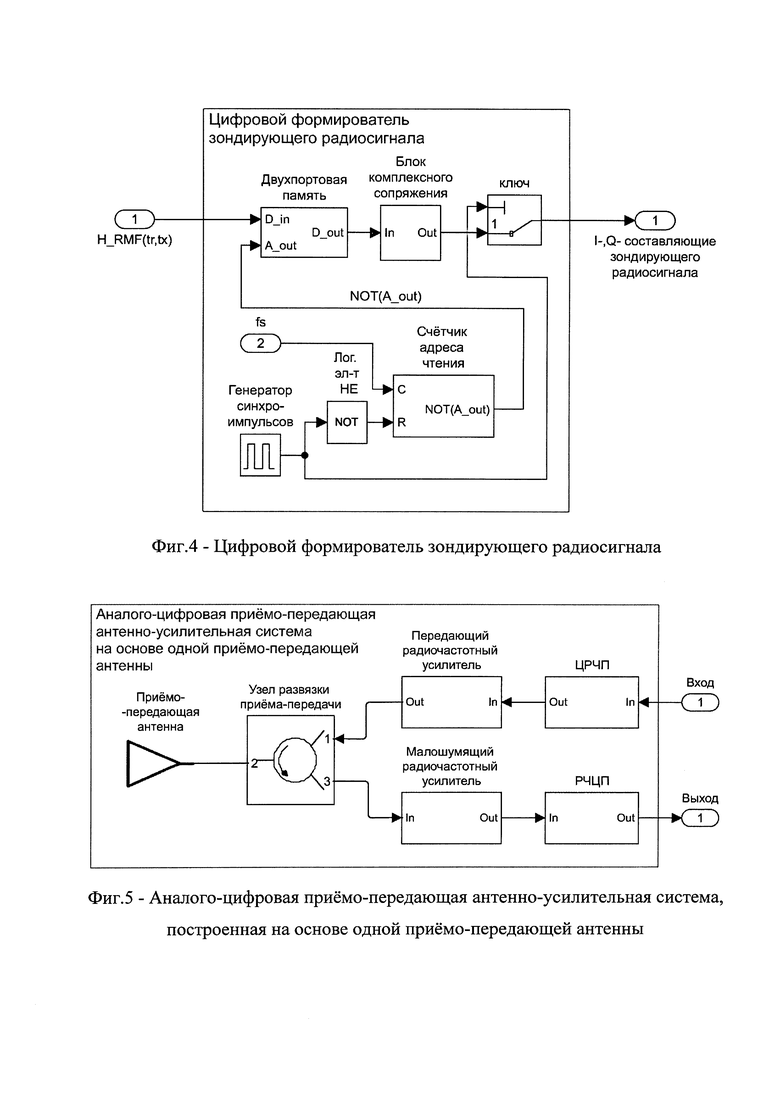
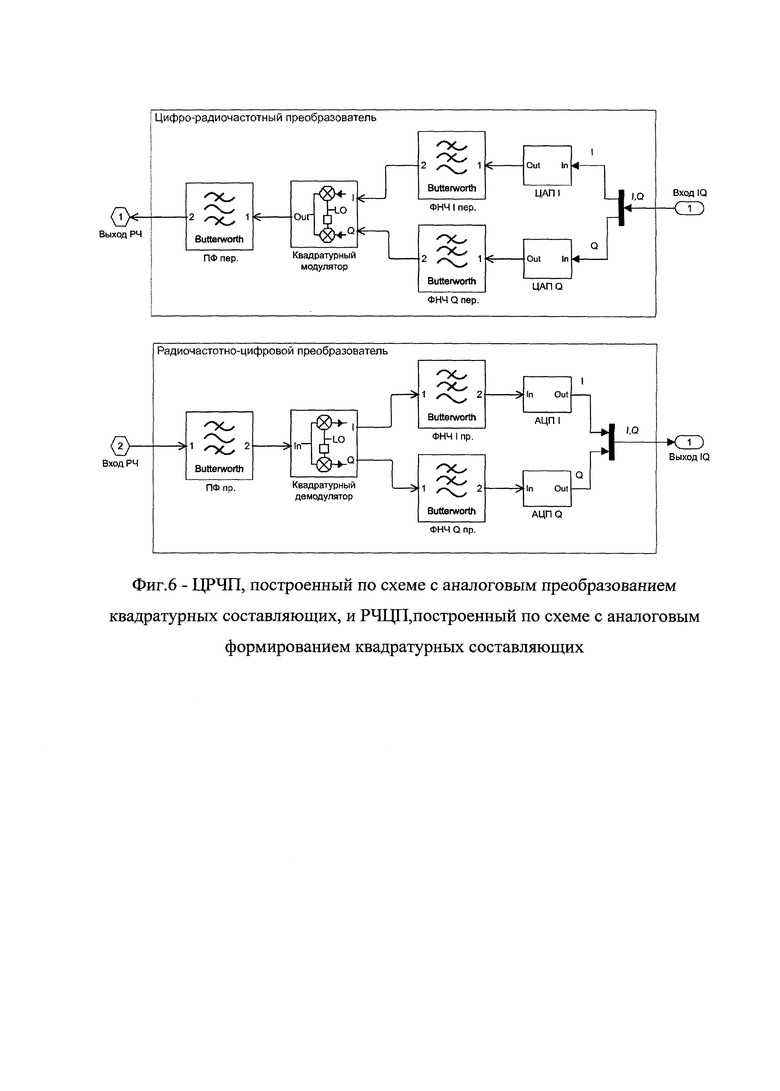
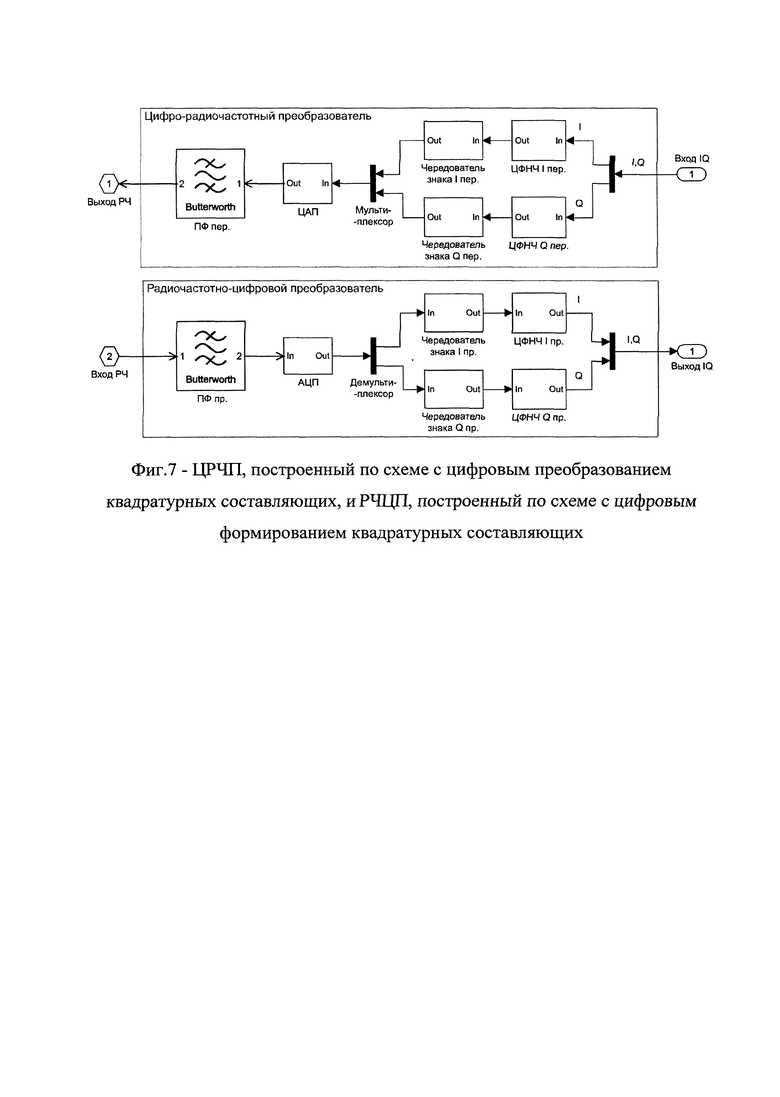
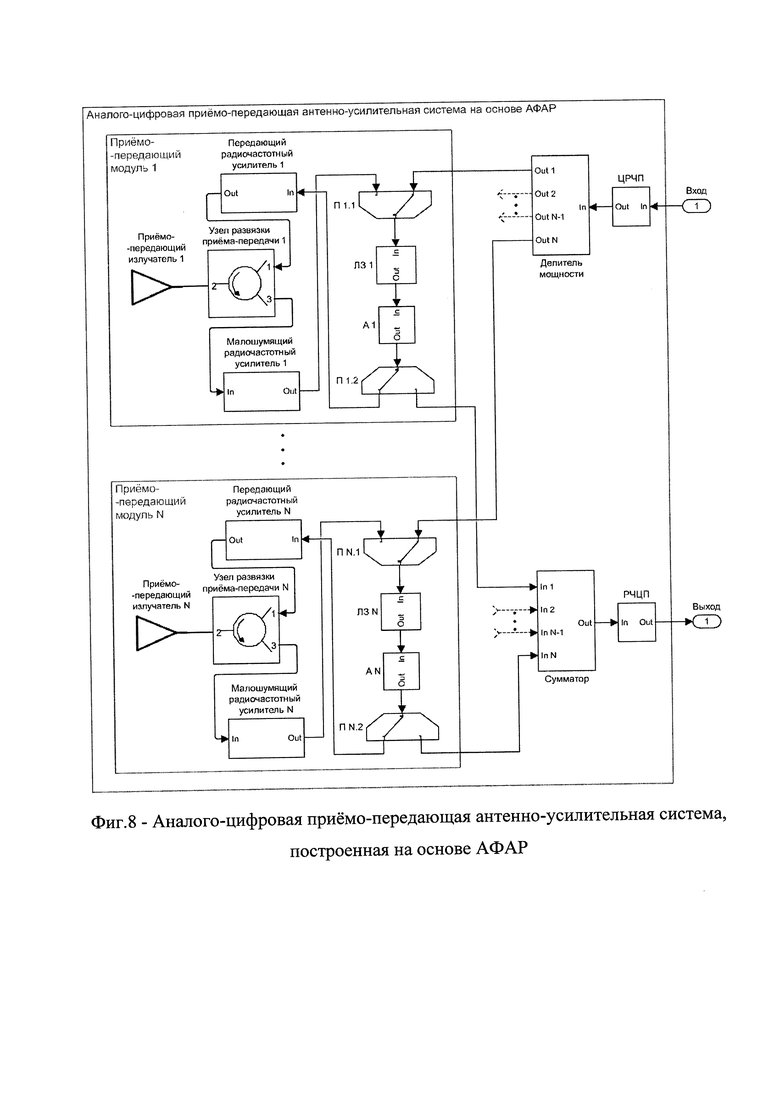
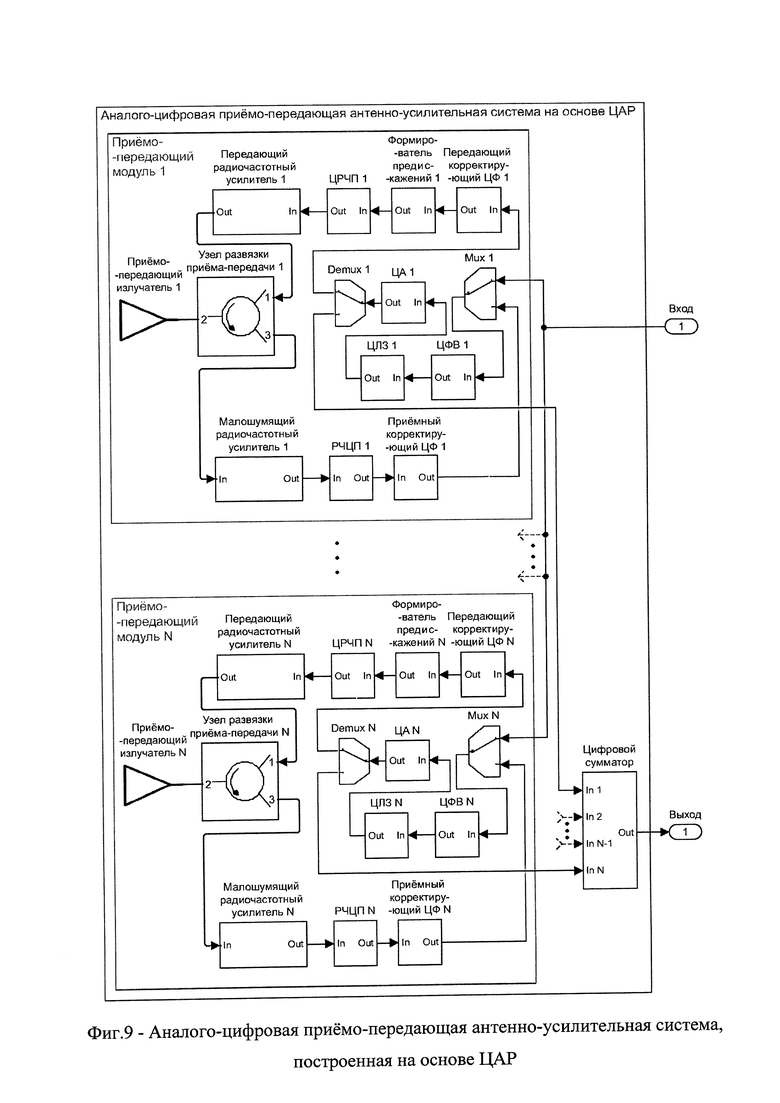
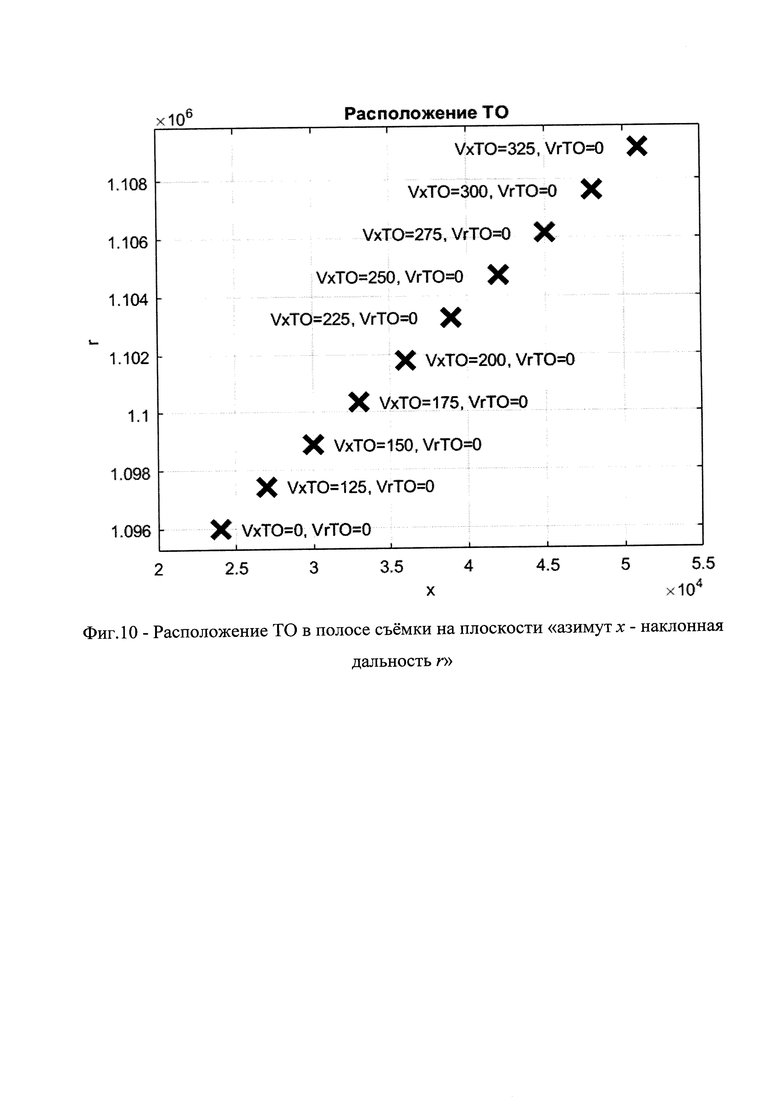
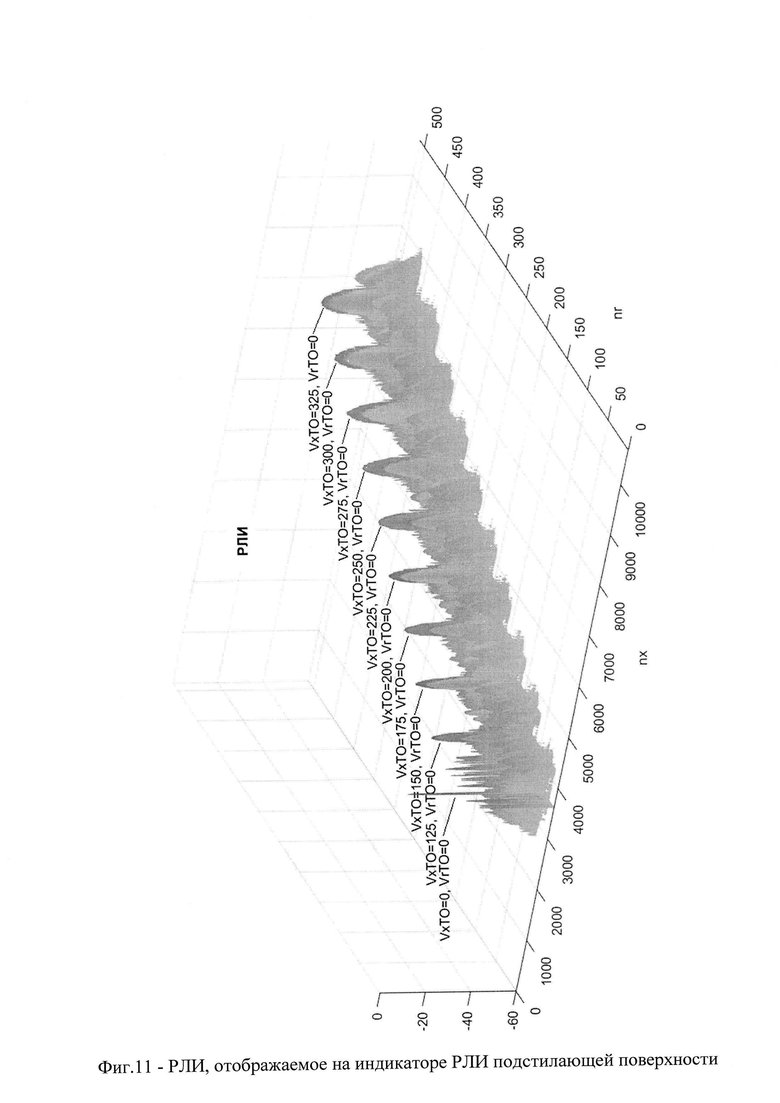
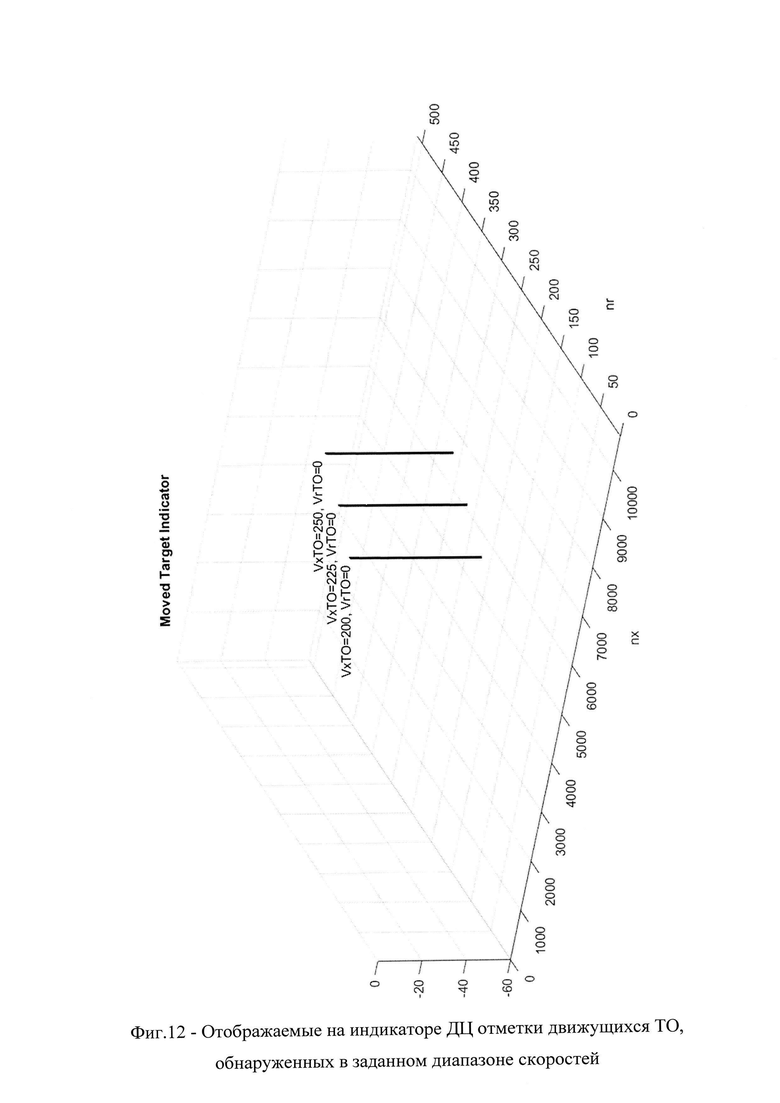
Изобретение относится к области радиолокации и предназначено для использования при создании радиолокаторов с синтезированной апертурой антенны (РСА) воздушного и комического базирования. Достигаемый технический результат - построение радиолокационного изображения (РЛИ) неподвижной подстилающей поверхности и обнаружение движущихся целей (ДЦ) на фоне отражений от подстилающей поверхности в широкой, неоднозначной по дальности полосе съемки при использовании сверхширокополосных зондирующих радиоимпульсов с изменяемыми от радиоимпульса к радиоимпульсу периодом повторения и волновой формой и минимальной потере потенциала радиолокатора, стремящейся к нулю децибел при увеличении скважности зондирующих радиоимпульсов. Радиолокатор с синтезированной апертурой антенны, реализующий способ радиолокационной съемки Земли и околоземного пространства в неоднозначной по дальности полосе с селекцией движущихся целей на фоне отражений от подстилающей поверхности, содержит: банк импульсных характеристик дальностного согласованного фильтра (СФ), пять блоков быстрого преобразования Фурье (БПФ), цифровой формирователь зондирующего радиосигнала, аналого-цифровую приемо-передающую антенно-усилительную систему, блок памяти цифровой радиоголограммы (ЦРГ), блок деления элементов дальности на группы, семь блоков умножения, блок расчета трехмерного массива импульсных характеристик азимутального СФ, четыре блока обратного БПФ, два блока объединения групп элементов дальности, блок расчета корректирующих функций, два блока вычисления амплитуд, индикатор РЛИ подстилающей поверхности, ресемплинговый блок коррекции периода дискретизации азимутальных сигналов, блок расчета четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr, блок расчета корректирующих по азимутальной скорости Vx функций, блок вычисления четырехмерного массива общих порогов, блок вычисления четырехмерного массива местных порогов, блок вычисления четырехмерного массива максимумов соседних элементов, блок вычисления четырехмерного массива максимальных порогов, блок компаратора, блок вычисления максимальных значений четырехмерного массива пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей, индикатор ДЦ. 2 н.п. ф-лы, 12 ил.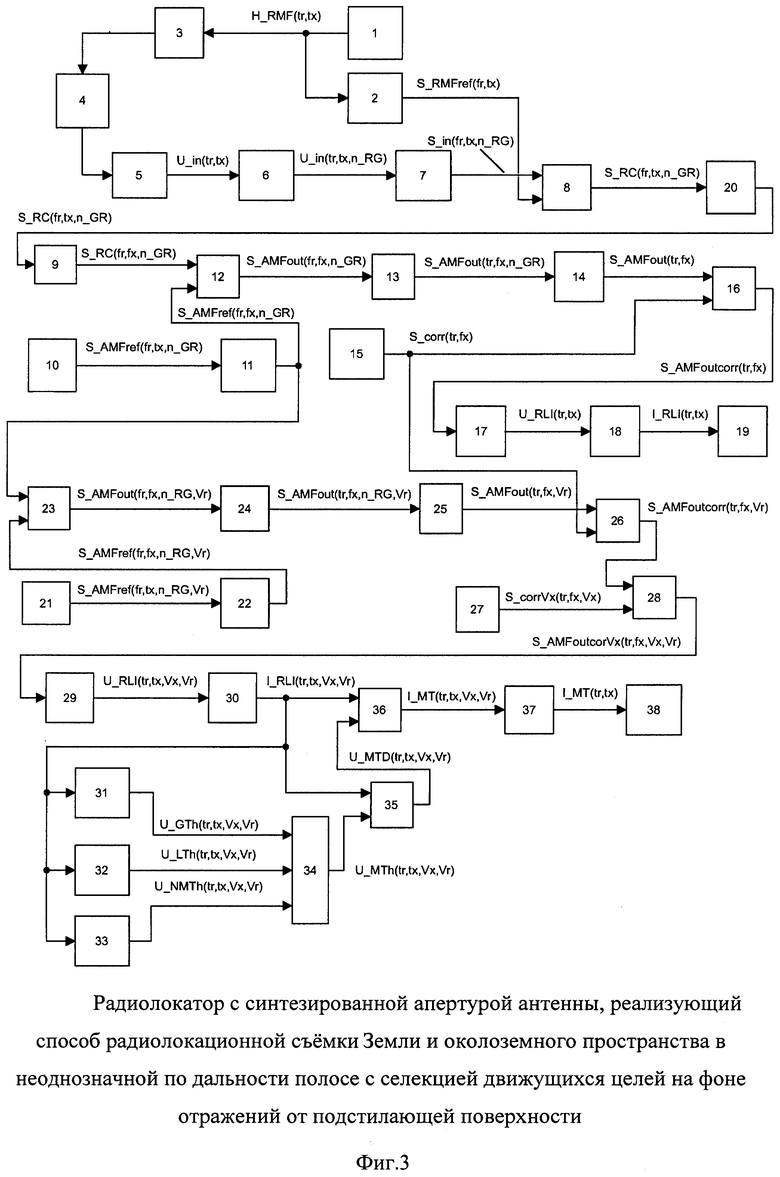
1. Способ радиолокационной съемки Земли и околоземного пространства радиолокатором с синтезированной апертурой антенны (РСА) в неоднозначной по дальности полосе с селекцией движущихся целей на фоне отражений от подстилающей поверхности,
заключающийся в том, что
хранят столбец HRMF(tr) импульсной характеристики дальностного согласованного фильтра (СФ) для используемого зондирующего радиоимпульса,
формируют зондирующий радиосигнал с фиксированным периодом повторения одинаковых зондирующих радиоимпульсов, соответствующих импульсной характеристике, хранимой в столбце HRMF(tr) импульсной характеристики дальностного СФ для используемого зондирующего радиоимпульса, и излучают этот радиосигнал в направлении снимаемой подстилающей поверхности при помощи аналого-цифровой приемо-передающей антенно-усилительной системы,
отраженный от подстилающей поверхности радиосигнал принимают при помощи аналого-цифровой приемо-передающей антенно-усилительной системы и получают цифровую радиоголограмму (ЦРГ) Uin(tr,tx), представляющую собой двумерный массив комплексных отсчетов, где tr - быстрое время вдоль наклонной дальности r, a tx - медленное время вдоль азимутальной координаты х,
ЦРГ Uin(tr,tx) делят вдоль быстрого времени tr на NRG групп отсчетов по наклонной дальности, получают при этом трехмерный массив комплексных отсчетов Uin(tr,tx,nRG), где nRG - номер группы отсчетов по наклонной дальности, являющийся также номером страниц в указанном трехмерном массиве,
в каждой группе отсчетов по наклонной дальности в трехмерном массиве комплексных отсчетов Uin(tr,tx,nRG) выполняют быстрое преобразование Фурье (БПФ) вдоль быстрого времени tr для каждого столбца отсчетов и получают при этом трехмерный массив Sin(ƒr,tx,nRG) дальностных спектров ЦРГ, где ƒr - дальностная частота,
выполняют БПФ от хранимого столбца HRMF(tr) импульсной характеристики дальностного СФ для используемого зондирующего радиоимпульса, получают при этом столбец SRMFref(ƒr) опорного спектра дальностного СФ,
столбцы трехмерного массива Sin(ƒr,tx,nRG) дальностных спектров ЦРГ поэлементно умножают на столбец SRMFref(ƒr) опорного спектра дальностного СФ, получают при этом трехмерный массив SRC(ƒr,tx,nRG) дальностных спектров сжатой по дальности ЦРГ,
выполняют БПФ вдоль медленного времени tx трехмерного массива SRC(ƒr,tx,nRG) дальностных спектров сжатой по дальности ЦРГ, получают при этом трехмерный массив SRC(ƒr,ƒx,nRG) двумерных спектров сжатой по дальности ЦРГ,
рассчитывают трехмерный массив импульсных характеристик азимутального СФ
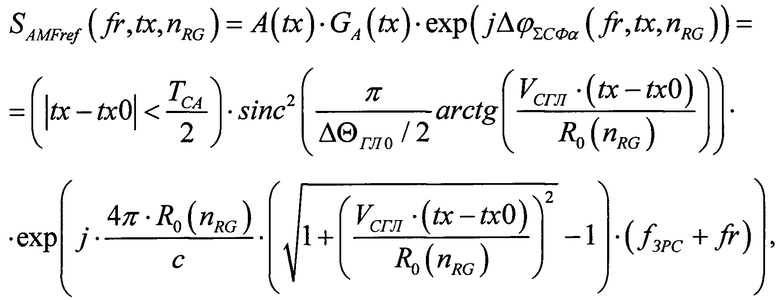
где  - множитель бланкирования временной опорной функции;
- множитель бланкирования временной опорной функции;
 - нормированная сквозная диаграмма направленности (ДН) антенны РСА;
- нормированная сквозная диаграмма направленности (ДН) антенны РСА;
 - мнимая единица;
- мнимая единица;
 - опорная фазовая функция азимутального СФ от медленного времени tx для дальностной частоты ƒr и номера группы элементов дальности nRG;
- опорная фазовая функция азимутального СФ от медленного времени tx для дальностной частоты ƒr и номера группы элементов дальности nRG;
 - центральное значение медленного времени tx;
- центральное значение медленного времени tx;
ТСА - время синтезирования апертуры;
ΔΘГЛ0 - ширина главного лепестка (ГЛ) ДН антенны РСА по уровню нулевой мощности;
VСГЛ - скорость движения следа ГЛ ДН антенны РСА по подстилающей поверхности;
R0(nRG) - траверсная наклонная дальность центра группы элементов дальности с номером nRG;
с - скорость распространения электромагнитных волн в вакууме;
ƒЗРС - несущая частота зондирующего радиосигнала;
выполняют построчно БПФ вдоль медленного времени tx трехмерного массива SAMFref(ƒr,tx,nRG) импульсных характеристик азимутального СФ, получают при этом трехмерный массив SAMFref(ƒr,ƒx,nRG) опорных двумерных спектров азимутального СФ,
трехмерный массив SRC(ƒr,ƒx,nRG) двумерных спектров сжатой по дальности ЦРГ поэлементно умножают на трехмерный массив SAMFref(ƒr,ƒx,nRG) опорных двумерных спектров азимутального СФ, получают при этом трехмерный массив SAMFout(ƒr,ƒx,nRG) двумерных спектров выходного сигнала азимутального СФ,
выполняют постолбцовое обратное БПФ трехмерного массива SAMFout(ƒr,ƒx,nRG) двумерных спектров выходного сигнала азимутального СФ вдоль частоты ƒr, получают при этом трехмерный массив SAMFout(tr,ƒx,nRG) азимутальных спектров выходного сигнала азимутального СФ,
страницы трехмерного массива SAMFout(tr,ƒx,nRG) азимутальных спектров выходного сигнала азимутального СФ выстраивают вдоль первой размерности - быстрого времени tr, получают при этом двумерный массив SAMFout(tr,ƒx) азимутальных спектров выходного сигнала азимутального СФ,
рассчитывают двумерный массив корректирующих функций

где λ - длина волны зондирующего радиосигнала;
R0(nRSG) - траверсная наклонная дальность центра подгруппы элементов дальности с номером nRSG;
ƒx - частота азимутального сигнала вдоль медленного времени tx;
двумерный массив SAMFout(tr,ƒx) азимутальных спектров выходного сигнала азимутального СФ построчно умножают на двумерный массив Scorr(tr,ƒx) корректирующих функций, получают при этом двумерный массив SAMFoutcorr(tr,ƒx) скорректированных азимутальных спектров,
вычисляют построчно обратное БПФ вдоль частоты ƒx двумерного массива SAMFoutcorr(tr,ƒx) скорректированных азимутальных спектров, получают при этом двумерный массив URLI(tr,tx) комплексных отсчетов радиолокационного изображения (РЛИ) подстилающей поверхности,
вычисляют амплитуды комплексных отсчетов двумерного массива URLI(tr,tx) комплексных отсчетов РЛИ подстилающей поверхности, получают при этом двумерный массив пикселей РЛИ подстилающей поверхности
IRLI(tr,tx)=20lg(|URLI(tr,tx)|)
двумерный массив IRLI(tr,tx) пикселей РЛИ подстилающей поверхности отображают на индикаторе РЛИ подстилающей поверхности,
отличающийся тем, что
хранят двумерный массив HRMF(tr,tx) импульсных характеристик дальностного СФ для всех используемых зондирующих радиоимпульсов,
зондирующий радиосигнал формируют с изменяемыми от радиоимпульса к радиоимпульсу периодом повторения и волновой формой, определяемой импульсными характеристиками, хранимыми в двумерном массиве HRMF(tr,tx) импульсных характеристик дальностного СФ для всех используемых зондирующих радиоимпульсов,
БПФ от импульсных характеристик, хранимых в столбцах двумерного массива HRMF(tr,tx) импульсных характеристик дальностного СФ для всех излучаемых зондирующих радиоимпульсов, выполняют постолбцово для всех зондирующих радиоимпульсов, получают при этом двумерный массив SRMFref(ƒr,tx) опорных спектров дальностных СФ для всех используемых зондирующих радиоимпульсов,
каждую страницу трехмерного массива Sin(ƒr,tx,nRG) дальностных спектров ЦРГ поэлементно умножают на двумерный массив SRMFref(ƒr,tx) опорных спектров дальностных СФ для всех используемых зондирующих радиоимпульсов,
после получения трехмерного массива SRC(ƒr,tx,nRG) дальностных спектров сжатой по дальности ЦРГ выполняют коррекцию периода дискретизации содержащихся в строках данного массива азимутальных сигналов путем ресемплинга отсчетов данного массива вдоль медленного времени tx, то есть вдоль строк, например, при помощи интерполяционного многочлена Лагранжа

где
 - базисные полиномы;
- базисные полиномы;
txn - нерегулярно расположенные моменты времени на входе операции ресемплинга;
tx - регулярно расположенные моменты времени на выходе операции ресемплинга;
SRC(ƒr,tx,nRG) - выходные отсчеты, взятые в регулярно расположенные моменты времени tx;
SRC(ƒr,txn,nRG) - входные отсчеты, взятые в нерегулярно расположенные моменты времени txn;
Ns - число используемых при ресемплинге входных отсчетов в окрестности вычисляемого выходного отсчета;
n=0…Ns - номер входного отсчета операции ресемплинга и базисного полинома;
m=0…Ns, кроме m≠n, - номер парциальной дроби при вычислении базисного полинома;
в результате чего получают отсчеты, взятые с равномерным периодом дискретизации на оси медленного времени tx, и лишь затем переходят к выполнению БПФ вдоль медленного времени tx,
рассчитывают четырехмерный массив импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr
выполняют построчно БПФ вдоль медленного времени tx четырехмерного массива SAMFref(ƒr,tx,nRG,Vr) импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr, получают при этом четырехмерный массив SAMFref(ƒr,ƒx,nRG,Vr) опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr,
трехмерный массив двумерных спектров сжатой по дальности ЦРГ SRC(ƒr,ƒx,nRG) умножают на все трехмерные подмассивы четырехмерного массива SAMFref(ƒr,ƒx,nRG,Vr) опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr, получают при этом четырехмерный массив SAMFout(ƒr,ƒx,nRG,Vr) двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr,
выполняют постолбцовое обратное БПФ вдоль частоты ƒr четырехмерного массива SAMFout(ƒr,ƒx,nRG,Vr) двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, получают при этом четырехмерный массив SAMFout(tr,ƒx,nRG,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr,
в каждом трехмерном подмассиве четырехмерного массива SAMFout(tr,ƒx,nRG,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr страницы выстраивают и объединяют вдоль первой размерности - быстрого времени tr, получают при этом набор страниц, образующий трехмерный массив SAMFout(tr,ƒx,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr,
каждую страницу трехмерного массива SAMFout(tr,ƒx,Vr) азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr поэлементно умножают на двумерный массив Scjrr(tr,ƒx) корректирующих функций, получают при этом трехмерный массив SAMFoutcorr(tr,ƒx,Vr) скорректированных азимутальных спектров для всех значений радиальной скорости Vr,
рассчитывают трехмерный массив корректирующих по азимутальной скорости Vx функций

где R0(tr) - траверсная наклонная дальность, соответствующая быстрому времени tr,
каждую страницу трехмерного массива SAMFoutcorr(tr,ƒx,Vr) скорректированных азимутальных спектров для всех значений радиальной скорости Vr поэлементно умножают на все страницы трехмерного массива ScorrVx(tr,ƒx,Vx) корректирующих по азимутальной скорости Vx функций, полученные при этом для каждого значения Vr трехмерные массивы, выстроенные вдоль четвертой размерности - радиальной скорости Vr, образуют четырехмерный массив SAMFoutcorrVx(tr,ƒx,Vx,Vr) скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr,
вычисляют построчно обратное БПФ вдоль частоты ƒx четырехмерного массива SAMFoutcorrVx(tr,ƒx,Vx,Vr) скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr, получают при этом четырехмерный массив URLI(tr,tx,Vx,Vr) комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr,
вычисляют амплитуды комплексных отсчетов четырехмерного массива URLI(tr,tx,Vx,Vr) комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr, получают при этом четырехмерный массив пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr
IRLI(tr,tx,Vx,Vr)=20⋅lg(|URLI(tr,tx,Vx,Vr)|),
вычисляют четырехмерный массив UGTh(tr,tx,Vx,Vr) общих порогов, например, по формуле UGTh(tr,tx.Vx,Vr)=UGTh_const, где UGTh_const - некоторое постоянное значение общего порога; или, например, по формуле

где kGTh>1 - коэффициент превышения общего порога над средним значением интенсивности пикселей РЛИ;
numel(M) - функция определения числа элементов в массиве М;
вычисляют четырехмерный массив ULTh(tr,tx,Vx,Vr) местных порогов, например, для каждого значения массива по формуле
где kLTh>1 - коэффициент превышения местного порога над средним значением интенсивности пикселей РЛИ в пределах местного четырехмерного подмассива ULSA;
Δtr - приращение быстрого времени tr в пределах местного четырехмерного подмассива ULSA;
Δtx - приращение медленного времени tx в пределах местного четырехмерного подмассива ULSA;
ΔVx - приращение азимутальной скорости движущихся целей (ДЦ) Vx в пределах местного четырехмерного подмассива;
ΔVr - приращение радиальной скорости ДЦ Vr в пределах местного четырехмерного подмассива;
суммирование производится в пределах местного четырехмерного подмассива ULSA=[Δtr]&[Δtx]&[ΔVx]&[ΔVr], определяемого строками значений переменных Δtr, Δtx, ΔVx, ΔVr,
[Δtr]=-Δtrmax…Δtrmax при условии 0≤(tr+Δtr)<Tr,
[Δtx]=-Δtxmax…Δtxmax при условии 0≤(tx+Δtx)<Tx,
[ΔVx]=-ΔVxmax…ΔVxmax при условии Vx min≤(Vx+ΔVx)<Vx max,
[ΔVr]=-ΔFrmax…ΔFrmax при условии Vr min≤(Vr+ΔVr)<max;
Δtrmax - максимальное значение Δtr;
Δtxmax - максимальное значение Δtx;
ΔVxmax - максимальное значение ΔVx;
ΔVrmax - максимальное значение ΔVr;
Tr - ширина диапазона значений быстрого времени tr;
Tx - ширина диапазона значений медленного времени tx;
Vx min, Vx max - минимальная и максимальная азимутальные скорости обнаруживаемых ДЦ;
Vr min, Vr max - минимальная и максимальная радиальные скорости обнаруживаемых ДЦ;
NLSA=(2Δtrmax+1)⋅(2Δtxmax+1)⋅(2ΔVxmax+1)⋅(2ΔVrmax+1) - число элементов в местном четырехмерном подмассиве ULSA;
вычисляют четырехмерный массив максимумов соседних элементов

при условиях
(Δtr≠0)|(Δtx≠0)|(ΔVx≠0)|(ΔVr≠0),
где «|» - логическое ИЛИ,
0≤(tr+Δtr)<Tr,
0≤(tx+Δtx)<Tx,
Vx min≤(Vx+ΔVx)<Vx max,
Vr min≤(Vr+ΔVr)<Vr max,
вычисляют четырехмерный массив максимальных порогов UMTh(tr,tx,Vx,Vr)=max[UGTh(tr,tx,Vx,Vr),ULTh(tr,tx,Vx,Vr),UNMTh(tr,tx,Vx,Vr)], где максимум берется поэлементно между массивами UGTh, ULTh и UNMTh,
сравнивают значения элементов четырехмерного массива IRLI(tr,tx,Vx,Vr) пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с соответствующими значениями четырехмерного массива UMTh(tr,tx,Vx,Vr) максимальных порогов, формируют при этом четырехмерный массив сигналов обнаружения движущихся целей (ДЦ)
UMTD(tr,tx,Vx,Vr)=(IRLI(tr,tx,Vx,Vr)>UMTh(tr,tx,Vx,Vr)),
поэлементно умножают элементы четырехмерного массива IRLI(tr,tx,Vx,Vr) пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы четырехмерного массива UMTD(tr,tx,Vx,Vr) сигналов обнаружения ДЦ, получают при этом четырехмерный массив пикселей РЛИ обнаруженных ДЦ
IMT(tr,tx,Vx,Vr)=IRLI(tr,tx, Vx, Vr)⋅UMTD(tr,tx,Vx,Vr),
вычисляют максимальные значения четырехмерного массива IMT(tr,tx,Vx,Vr) пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей, получают при этом двумерный массив пикселей РЛИ обнаруженных ДЦ

отображают двумерный массив пикселей РЛИ обнаруженных ДЦ IMT(tr,tx) на индикаторе ДЦ.
2. Радиолокатор с синтезированной апертурой антенны, реализующий способ п. 1, содержащий
банк импульсных характеристик дальностного СФ,
первый блок БПФ вдоль быстрого времени tr, вход которого подключен к выходу банка импульсных характеристик дальностного СФ,
цифровой формирователь зондирующего радиосигнала, вход которого подключен к выходу банка импульсных характеристик дальностного СФ,
аналого-цифровую приемо-передаюшую антенно-усилительную систему, вход которой подключен к выходу цифрового формирователя зондирующего радиосигнала,
блок памяти ЦРГ, вход которого подключен к выходу аналого-цифровой приемо-передающей антенно-усилительной системы,
блок деления элементов дальности на группы, вход которого подключен к выходу блока памяти ЦРГ,
второй блок БПФ вдоль быстрого времени tr, вход которого подключен к выходу блока деления элементов дальности на группы,
первый блок умножения, первый вход которого подключен к выходу второго блока БПФ вдоль быстрого времени tr, а второй вход - к выходу первого блока БПФ вдоль быстрого времени tr,
первый блок БПФ вдоль медленного времени tx,
блок расчета трехмерного массива импульсных характеристик азимутального СФ,
второй блок БПФ вдоль медленного времени tx, вход которого подключен к выходу блока расчета трехмерного массива импульсных характеристик азимутального СФ,
второй блок умножения, первый вход которого подключен к выходу первого блока БПФ вдоль медленного времени tx, а второй вход - к выходу второго блока БПФ вдоль медленного времени tx,
первый блок обратного БПФ вдоль частоты ƒr, вход которого подключен к выходу второго блока умножения,
первый блок объединения групп элементов дальности, вход которого подключен к выходу первого блока обратного БПФ вдоль частоты ƒr,
блок расчета корректирующих функций,
третий блок умножения, первый вход которого подключен к выходу первого блока объединения групп элементов дальности, а второй вход - к выходу блока расчета корректирующих функций,
первый блок обратного БПФ вдоль частоты ƒx, вход которого подключен к выходу третьего блока умножения,
первый блок вычисления амплитуд, вход которого подключен к выходу первого блока обратного БПФ вдоль частоты ƒx,
индикатор РЛИ подстилающей поверхности, вход которого подключен к выходу первого блока вычисления амплитуд,
отличающийся тем, что в устройство дополнительно введены
ресемплинговый блок коррекции периода дискретизации азимутальных сигналов, выполняющий ресемплинг вдоль медленного времени tx отсчетов трехмерного массива дальностных спектров сжатой по дальности ЦРГ, с входом и выходом,
блок расчета четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr с выходом,
третий блок построчного БПФ вдоль медленного времени tx четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr с входом и выходом,
четвертый блок умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr с первым и вторым входами и выходом,
второй блок обратного БПФ вдоль частоты ƒr четырехмерного массива двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr с входом и выходом,
второй блок объединения групп элементов дальности, выстраивающий и объединяющий вдоль первой размерности страницы трехмерных подмассивов четырехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, с входом и выходом,
пятый блок умножения, умножающий каждую страницу трехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr на двумерный массив корректирующих функций, с первым и вторым входами и выходом,
блок расчета корректирующих по азимутальной скорости Vx функций с выходом,
шестой блок умножения, умножающий каждую страницу трехмерного массива скорректированных азимутальных спектров для всех значений радиальной скорости Vr на все страницы трехмерного массива корректирующих по азимутальной скорости Vx функций, с первым и вторым входами и выходом,
второй блок построчного обратного БПФ вдоль частоты ƒx четырехмерного массива скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr c входом и выходом,
второй блок вычисления амплитуд комплексных отсчетов четырехмерного массива комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с входом и выходом,
блок вычисления четырехмерного массива общих порогов с входом и выходом,
блок вычисления четырехмерного массива местных порогов с входом и выходом,
блок вычисления четырехмерного массива максимумов соседних элементов с входом и выходом,
блок вычисления четырехмерного массива максимальных порогов с первым, вторым и третьим входами и выходом,
блок компаратора, сравнивающий значения элементов четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с соответствующими значениями четырехмерного массива максимальных порогов, с первым и вторым входами и выходом,
седьмой блок умножения, поэлементно умножающий элементы четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы четырехмерного массива сигналов обнаружения ДЦ, с первым и вторым входами и выходом,
блок вычисления максимальных значений четырехмерного массива пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей с входом и выходом,
индикатор ДЦ, отображающий двумерный массив пикселей РЛИ обнаруженных ДЦ, с входом,
причем
выход первого блока умножения подключен ко входу ресемплингового блока коррекции периода дискретизации азимутальных сигналов, выполняющего ресемплинг вдоль медленного времени tx отсчетов трехмерного массива дальностных спектров сжатой по дальности ЦРГ, выход которого подключен ко входу первого блока БПФ вдоль медленного времени tx, выход которого подключен к первому входу четвертого блока умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr,
выход блока расчета четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr подключен ко входу третьего блока построчного БПФ вдоль медленного времени tx четырехмерного массива импульсных характеристик азимутального СФ для всех значений радиальной скорости Vr, выход которого подключен ко второму входу четвертого блока умножения трехмерного массива двумерных спектров сжатой по дальности ЦРГ на трехмерные подмассивы четырехмерного массива опорных двумерных спектров азимутального СФ для всех значений радиальной скорости Vr, выход которого подключен ко входу второго блока обратного БПФ вдоль частоты ƒr четырехмерного массива двумерных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, выход которого подключен ко входу второго блока объединения групп элементов дальности, выстраивающего и объединяющего вдоль первой размерности страницы трехмерных подмассивов четырехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr, выход которого подключен к первому входу пятого блока умножения, умножающего каждую страницу трехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr на двумерный массив корректирующих функций,
выход блока расчета корректирующих функций подключен ко второму входу пятого блока умножения, умножающего каждую страницу трехмерного массива азимутальных спектров выходного сигнала азимутального СФ для всех значений радиальной скорости Vr на двумерный массив корректирующих функций, выход которого подключен к первому входу шестого блока умножения, умножающего каждую страницу трехмерного массива скорректированных азимутальных спектров для всех значений радиальной скорости Vr на все страницы трехмерного массива корректирующих по азимутальной скорости Vx функций,
выход блока расчета корректирующих по азимутальной скорости Vx функций подключен ко второму входу шестого блока умножения, умножающего каждую страницу трехмерного массива скорректированных азимутальных спектров для всех значений радиальной скорости Vr на все страницы трехмерного массива корректирующих по азимутальной скорости Vx функций, выход которого подключен ко входу второго блока построчного обратного БПФ вдоль частоты ƒx четырехмерного массива скорректированных по азимутальной скорости Vx азимутальных спектров для всех значений азимутальной и радиальной скоростей Vx и Vr, выход которого подключен ко входу второго блока вычисления амплитуд комплексных отсчетов четырехмерного массива комплексных отсчетов РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr, выход которого подключен к первому входу седьмого блока умножения, поэлементно умножающего элементы четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы четырехмерного массива сигналов обнаружения ДЦ, к первому входу блока компаратора, сравнивающего значения элементов четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с соответствующими значениями четырехмерного массива максимальных порогов, ко входу блока вычисления четырехмерного массива местных порогов, ко входу блока вычисления четырехмерного массива максимумов соседних элементов и ко входу блока вычисления четырехмерного массива общих порогов, выход которого подключен к первому входу блока вычисления четырехмерного массива максимальных порогов,
выход блока вычисления четырехмерного массива местных порогов подключен ко второму входу блока вычисления четырехмерного массива максимальных порогов,
выход блока вычисления четырехмерного массива максимумов соседних элементов подключен к третьему входу блока вычисления четырехмерного массива максимальных порогов, выход которого подключен ко второму входу блока компаратора, сравнивающего значения элементов четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr с соответствующими значениями четырехмерного массива максимальных порогов, выход которого подключен ко второму входу седьмого блока умножения, поэлементно умножающего элементы четырехмерного массива пикселей РЛИ подстилающей поверхности для всех значений азимутальной и радиальной скоростей Vx и Vr на соответствующие элементы четырехмерного массива сигналов обнаружения ДЦ, выход которого подключен ко входу блока вычисления максимальных значений четырехмерного массива пикселей РЛИ обнаруженных ДЦ вдоль размерностей радиальной Vr и азимутальной Vx скоростей, выход которого подключен ко входу индикатора ДЦ, отображающего двумерный массив пикселей РЛИ обнаруженных ДЦ,
при этом
банк импульсных характеристик дальностного СФ хранит и выдает на свой выход двумерный массив импульсных характеристик дальностного СФ для всех используемых зондирующих радиоимпульсов,
цифровой формирователь зондирующего радиосигнала формирует зондирующий радиосигнал с изменяемыми от радиоимпульса к радиоимпульсу периодом повторения и волновой формой, определяемой импульсными характеристиками, содержащимися в столбцах поступающего на его вход двумерного массива импульсных характеристик дальностного СФ для всех используемых зондирующих радиоимпульсов,
первый блок БПФ вдоль быстрого времени tr выполняет БПФ постолбцово для всех столбцов поступающего на его вход двумерного массива импульсных характеристик дальностного СФ для всех излучаемых зондирующих радиоимпульсов и выдает при этом на свой выход двумерный массив опорных спектров дальностных СФ для всех используемых зондирующих радиоимпульсов,
а первый блок умножения поэлементно умножает поступающие на свой первый вход страницы трехмерного массива дальностных спектров ЦРГ на поступающий по второму входу двумерный массив опорных спектров дальностных СФ для всех используемых зондирующих радиоимпульсов.
| Способ формирования изображения поверхности в бортовой радиолокационной станции с синтезированием апертуры антенны с электронным управлением лучом | 2016 |
|
RU2617116C1 |
| Способ формирования изображения земной поверхности в радиолокационной станции с синтезированием апертуры антенны | 2016 |
|
RU2614041C1 |
| Способ цифровой обработки сигналов в радиолокационных станциях с синтезированной апертурой антенны непрерывного излучения и устройство для его осуществления | 2016 |
|
RU2624630C1 |
| Способ построения радиолокационного изображения с помощью радиолокационной станции с синтезированной апертурой | 2017 |
|
RU2661941C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМИПРЕССАМИ | 0 |
|
SU180088A1 |
| РАДИОЛОКАТОР БОКОВОГО ОБЗОРА ЗЕМЛИ С СИНТЕЗОМ АПЕРТУРЫ АНТЕННЫ И УЛЬТРАВЫСОКИМ РАЗРЕШЕНИЕМ | 2010 |
|
RU2434243C1 |
| Устройство формирования радиолокационного изображения в радиолокационной станции с синтезированной апертурой антенны | 2016 |
|
RU2619771C1 |
| JPS 62124481 A, 05.06.1987 | |||
| US 6781541 B1, 24.08.2004 | |||
| WO 2015008310 A1, 22.01.2015 | |||
| US 6046695 A, 04.04.2000 | |||
| US 5677693 A, 14.10.1997. | |||

