Изобретение относится к радиолокации и может быть использовано в радиолокационных системах с высоким и ультравысоким разрешением, а также для зондирования земной поверхности с целью обнаружения и идентификация малозаметных объектов, в том числе объектов на открытой местности, над водной поверхностью, скрытых растительным или снежным покровом, заглубленных в почвогрунт.
Известны радиолокаторы с ультравысоким разрешением, излучающие в пространство сверхкороткие видеоимпульсы. Описание таких радиолокаторов приведено, например, в патентах США
№5361070, кл. G01S 13/00, 1994,
№5457394, кл. G01S 13/04, 1995,
№5757320, кл. G01S 1/24, 1998.
Эти радиолокаторы обеспечивают уникальные возможности обнаружения и разрешения по дальности достаточно малых объектов, в том числе за материальными преградами. Однако их азимутальное разрушение, обусловленное достижимым значением ширины диаграммы направленности антенны при жестких ограничениях на массово-габаритные характеристики антенного устройства, остается весьма низким, что делает радиолокаторы из приведенных примеров непригодным для использования в качестве радиолокатора бокового обзора.
Эти известные технические решения обладают недостатками - низкими функциональными возможностями, обусловленными низким дальнодействием и разрешающей способностью радиолокатора, отсутствием стабильности работы радиолокатора в широком диапазоне траекторной нестабильности полета носителя, низкой информативностью результирующих радиолокационных изображений.
Также известны радиолокаторы бокового обзора Земли с синтезированием апертуры антенны, описанные, например в патенте РФ №2168186, кл. G01S 13/90, 2001 г. В этих радиолокаторах для повышения информативности получаемых откликов используется метод многочастотного радиоизлучения, в том числе в существенно различных радиодиапазонах X, L, Р и VHF с последующим синтезом апертуры антенны для каждого из них. Однако сложность и трудоемкость совместной постобработки радиолокационных данных для получения радиолокационного изображения значительно снижает практическую ценность предложенных методов.
Данное техническое решение также обладает недостатками - низкими функциональными возможностями, обусловленными низкими дальнодействием и разрешающей способностью радиолокатора, отсутствием стабильности работы радиолокатора в широком диапазоне траекторией нестабильности полета носителя, низкой информативностью результирующих радиолокационных изображений.
Наиболее близким к предлагаемому техническому решению является радиолокатор, содержащий антенное устройство, состоящее из девятиэлементной линейной антенной решетки, каждый элемент которой соединен с соответствующим выходом антенного согласующего устройства, вход антенного согласующего устройства подключен к выходу антенного переключателя; передающий блок, состоящий из генератора видеоимпульса длительностью 5 нс, подключенного к первому входу антенного переключателя; приемный блок, содержащий широкополосный усилитель радиосигнала, подключенный своим входом к второму входу антенного переключателя, выход широкополосного усилителя радиосигнала соединен с входами переключаемого трехканального полосового фильтра с полосами пропускания в 1-м канале от 100 до 300 МГц, во 2-м канале от 200 до 400 МГц, в 3-м канале от 100 до 600 МГц. Выход полосового фильтра соединен с первым входом квадратурного детектора, второй и третий входы которого подключены к выходам перестраиваемого гетеродина, который подает на квадратурный детектор пару опорных напряжений с частотой 200 МГц или 300 МГц в зависимости от выбранного канала полосового фильтра. Каждый из выходов квадратурного детектива соединены с входом соответствующего аналого-цифрового преобразователя (АЦП). Выходы АЦП подключены к входам устройства регистрации и цифровой обработки данных, содержащего двухканальную подсистему регистрации входных потоков данных, состоящую из быстродействующего ОЗУ емкостью 16 МБ в каждом канале, позволяющего вести непрерывную запись в течение 30 с, и общего дискового запоминающего устройства. Он также содержит аппаратно-программный комплекс, осуществляющий цифровую обработку данных, в том числе: согласованную фильтрацию откликов, синтез апертуры антенны, построение радиолокационного изображения, регистрацию и отображение полученных результатов (см. Roger S. Vickers, Victor H. Gonzales and Robert W. Ficklin Result from a VHP synthetic - aperture radar. SPIE Vol.1631, Ultra wideband Radar (1992), p.219-225).
Описанное устройство также обладает недостатками - низкими функциональными возможностями, обусловленными низкими дальнодействием и разрешающей способностью радиолокатора, отсутствием стабильности работы радиолокатора в широком диапазоне траекторной нестабильности полета носителя, низкой информативностью результирующих радиолокационных изображений.
Техническим результатом, на достижение каждого направлено предлагаемое изоберетение, является расширение функциональных возможностей устройства за счет повышения дальнодействия и разрешающей способности радиолокатора, обеспечения стабильности работы радиолокатора в широком диапазоне траекторной нестабильности полета носителя, повышение информативности результирующих радиолокационных изображений.
Указанный выше технический результат достигается за счет того, что в радиолокаторе бокового обзора Земли с синтезом апертуры антенны и ультравысоким разрешением, вывод, по меньшей мере, одной приемной антенны, выполненной с возможностью изменения апертуры, соединен с первым входом малошумящего усилителя радиочастоты, который выходом подключен к первому входу аналого-цифрового преобразователя (АЦП), первый выход модуля синхронизации связан со вторым входом малошумящего усилителя радиочастоты и вторым входом АЦП, который первой шиной информационных данных подключен к первым информационным входам аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени, соединенного первым выходом с третьим входом малошумящего усилителя радиочастоты, второй выход аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени подключен к первому входу генератора видеоимпульсов, соединенного выходом с выводом, по меньшей мере, одной передающей антенны, выполненной с возможностью изменения апертуры, второй и третий выходы модуля синхронизации связаны, соответственно, с первым и вторым управляющими входами аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени, который первой шиной управляющих данных подключен к управляющим входам АЦП, третий вход которого соединен с четвертым выходом модуля синхронизации, связанного пятым выходом со вторым входом генератора видеоимпульсов, шестой выход модуля синхронизации соединен с первым входом, по меньшей мере, одного датчика пространственного перемещения радиолокатора, который выходом подключен ко входу модуля синхронизации, а второй шиной информационных данных соединен со вторыми информационными входами аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени, связанного второй шиной управляющих данных с управляющими входами модуля синхронизации, а третьей шиной управляющих данных - с управляющими входами, по меньшей мере, одного датчика пространственного перемещения радиолокатора, при этом аппаратно-программный комплекс цифровой обработки данных, регистрации, управления и связи в режиме реального времени выполнен с возможностью передачи данных по третьей шине информационных данных в цифровой радиоканал.
Кроме того, по меньшей мере, одна приемная антенна выполнена в виде одноэлементной антенны, и за счет того, что по меньшей мере, один датчик пространственного перемещения радиолокатора выполнен с возможностью непрерывного счисления текущих координат радиолокатора.
Кроме того, данный технический результат достигается также за счет того, что по меньшей мере, один датчик пространственного перемещения радиолокатора выполнен с возможностью регистрации положения фазового центра приемопередающей антенной системы, состоящей из, по меньшей мере, одной приемной антенны и, по меньшей мере, одной передающей антенны, и за счет того, что АЦП содержит запоминающее устройство, и, кроме того, за счет того, что аппаратно-программный комплекс цифровой обработки данных, регистрации, управления и связи в режиме реального времени содержит встроенный матричный многопроцессорный вычислитель.
Кроме того, матричный многопроцессорный вычислитель выполнен с возможностью синтеза апертуры, по меньше мере, одной приемной антенны и апертуры, по меньшей мере, одной передающей антенны.
Кроме того, генератор видеоимпульсов выполнен с возможностью регулирования длительности видеоимпульсов.
Кроме того, малошумящий усилитель радиочастоты выполнен с возможностью регулирования усиления в динамическом режиме.
Сущность данного изобретения раскрыта на чертеже, где представлена функциональная схема радиолокатора бокового обзора Земли с синтезом апертуры антенны и ультравысоким разрешением.
Радиолокатор содержит (см. чертеж) приемный блок 1, в который входят, по меньшей мере, одна приемная антенна 2, малошумящий усилитель радиочастоты (МШУ) 3 и аналого-цифровой преобразователь (АЦП) 4. Также на чертеже показан блок 5 цифровой обработки и управления, который содержит модуль синхронизации (МС) 6, аппаратно-программный комплекс цифровой обработки данных, регистрации, управления и связи в режиме реального времени (АПК ЦОРУС) 7 и, по меньшей мере, один датчик пространственного перемещения радиолокатора (ДПП) 8.
Входящий в устройство передающий блок 9 состоит из, по меньшей мере, одной передающей антенны 10 и генератора 11 видеоимпульсов. На чертеже также обозначена шина 12 информационных данных, шина 13 управляющих данных, шина 14 информационных данных и шина 15, 16 и 17 управляющих данных.
При этом вывод, по меньшей мере, одной приемной антенны, выполненной с возможностью изменения апертуры, соединен с первым входом малошумящего усилителя радиочастоты 3, который выходом подключен к первому входу аналого-цифрового преобразователя (АЦП) 4, первый выход модуля 6 синхронизации связан со вторым входом малошумящего усилителя радиочастоты 3 и вторым входом АЦП 4, который первой шиной 12 информационных данных подключен к первым информационным входам аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени 7, соединенного первым выходом с третьим входом малошумящего усилителя радиочастоты 3, второй выход аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени 7 подключен к первому входу генератора 11 видеоимпульсов, соединенных выходом с выводом, по меньшей мере, одной передающей антенны 10, выполненной с возможностью изменения апертуры, второй и третий выходы модуля 6 синхронизации связаны, соответственно, с первым и вторым управляющим входами аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени 7, который первой шиной 13 управляющих данных подключен к управляющим входам АЦП, третий вход которого соединен с четвертым выходом модуля 6 синхронизации, связанного пятым выходом со вторым входом генератора 11 видеоимпульсов, шестой выход модулях 6 синхронизации соединен с первым входом, по меньшей мере, одного датчика 8 пространственного перемещения радиолокатора, который выходом подключен ко входу модуля 6 синхронизации, а второй шиной 14 информационных данных соединен со вторыми информационными входами аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени 7, связанного второй шиной 15 управляющих данных с управляющими входами модуля 6 синхронизации, а третьей шиной 16 управляющих данных - с управляющими входами, по меньшей мере, одного датчика 8 пространственного перемещения радиолокатора, при этом аппаратно-программный комплекс цифровой обработки данных, регистрации, управления и связи в режиме реального времени 7 выполнен с возможностью передачи данных по третьей шине 17 информационных данных в цифровой радиоканал.
По меньшей мере, одна приемная антенна 2 выполнена в виде одноэлементной антенны.
По меньшей мере, один датчик 8 пространственного перемещения радиолокатора выполнен с возможностью непрерывного счисления текущих координат радиолокатора.
По меньшей мере, один датчик 8 пространственного перемещения радиолокатора выполнен с возможностью регистрации положения фазового центра приемопередающей антенной системы, состоящей из, по меньшей мере, одной приемной антенны 2 и, по меньшей мере, одной передающей антенны 10.
АЦП 4 содержит запоминающее устройство.
Аппаратно-программный комплекс цифровой обработки данных, регистрации, управления и связи в режиме реально времени 7 содержит встроенный матричный многопроцессорный вычислитель.
Матричный многопроцессорный вычислитель выполнен с возможностью синтеза апертуры, по меньшей мере, одной приемной антенны 2 и апертуры, по меньшей мере, одной передающей антенны 10.
Генератор 11 видеоимпульсов выполнен с возможностью регулирования длительности видеоимпульсов.
Малошумящий усилитель 3 радиочастоты выполнен с возможностью регулирования усиления в динамическом режиме.
Радиолокатор бокового обзора Земли с синтезом апертуры антенны и ультравысоким разрешением работает следующим образом.
Работу радиолокаторы рассмотрим на примере, когда в его состав входят одна приемная антенна, одна передающая антенна и один датчик пространственного перемещения радиолокатора.
В период начальной инициализации радиолокатора АПК ЦОРУС 7 по цифровым каналам связи загружает в АЦП 4, МС 6 и ДПП 8 рабочие программы и параметры настройки этих модулей. Модуль синхронизации МС 6 начинает выдачу тактовых сигналов на АЦП 4, ДПП 8 и АПК ЦОРУС 7, формирующих внутреннюю временную шкалу устройства. В процессе радиолокационных измерений датчик пространственного положения радиолокатора ДПП 8 ведет непрерывное счисление текущих координат носителя и пространственного положения фазового центра приемопередающей антенной системы.
По достижении заданного значения пространственного перемещения фазового центра приемопередающей антенной системы в направлении полета носителя ДПП 8 выдает на аналоговый вход модуля синхронизации МС 6 команду запуска циклограммы работы радиолокатора. При этом одновременно формируется кадр навигационно-временной информации, который по цифровому каналу связи передается на соответствующий вход АПК ЦОУС 7 для дальнейшей регистрации совместно с радиолокационными данными, МС 6 формирует серию привязанных.к внутреннему тактовому сигналу управляющих импульсов и выдает их одновременно на управляющий вход напряжения запуска генератора 11 и второй аналоговый вход АПК ЦОРУС 7.
По первому сигналу из этой серии АПК ЦОРУС 7 выполняет временную привязку цикла работы радиолокатора к внутренней временной шкале, запускает программу управления длительностью выходных видеоимпульсов генератора 11 в серии и выдает заданные программой управляющие напряжения на соответствующий вход генератора 11. Генератор 11 формирует мощный видеоимпульс заданной длительности с известной задержкой, необходимой для срабатывания внутренних цепей генератора 11.Выходные видеоимпульсы генератора 11 поступают на вход передающей антенны 10 и излучаются в окружающее пространство.
Выдержав заданный программой инициализации требуемый защитный интервал, МС 6 вырабатывает строб напряжения РАБОТА, поступающий на соответствующие входы нормально закрытых МШУ 3 и АЦП 4. Длительность этого строба ограничена требуемой боковой наклонной дальностью, обеспечивающей заданную глубину полосы обзора на местности. С выхода приемной антенны 2 отклик радиолокационного сигнала поступает на сигнальный вход МШУ 3, на первый управляющий вход МШУ 3 от АПК ЦОРУС 7 поступает управляющее напряжение динамической регулировки усиления в пределах от минус 20 дБ до плюс 60 дБ, необходимой для нормализации уровня выходного сигнала МШУ 3, резко падающего на его входе в зависимости от текущей дальности отклика.
АЦП 4 осуществляет оцифровку усиленного и нормализованного аналогового радиолокационного сигнала во всей, мгновенной полосе частот его спектра, в буферном запоминающем устройстве АЦП 4 накапливаются данные всей серии цикла. С выхода АЦП 4 радиолокационные данные поступают на первый цифровой вход АПК ЦОРУС 7, где подвергаются адаптивной цифровой фильтрации, использующей избыточность поступивших данных для улучшения соотношения полезный сигнал/помеха и увеличения, в конечном итоге, эффективного дальнодействия радиолокатора, обеспечения максимального приближения к его потенциальной разрешающей способности.
Прошедшие первичную обработку радиолокационные данные совместно с принятой от ДПП 4 навигационно-временной информацией и привязанные к внутренней временной шкале устройства образуют блок радиолокационных измерений, который в полном объеме сохраняется во встроенном твердотельном запоминающем устройстве АПК ЦОРУС 7 и поступает на вход программы для встроенного матричного многопроцессорного вычислителя, реализующей синтез апертуры антенны. На этом цикл работы радиолокатора на первичном уровне завершается, аппаратура переходит в фазу ожидания очередной команды запуска циклограммы работы радиолокатора от ДПП 8. На вторичном уровне работа АПК ЦОРУС 7 связана с циклограммой первичного уровня только темпом поступления блоков радиолокационных измерений, которые образуют массив входных данных программы для встроенного матричного многопроцессорного вычислителя, реализующей синтез апертуры антенны. Массив выходных данных содержит элементы результирующего радиолокационного изображения (РЛИ) земной поверхности в полосе бокового обзора радиолокатора. Полученные РЛИ сохраняются во встроенном твердотельном запоминающем устройстве АПК ЦОРУС 7 и по запросу через четвертый цифровой выход АПК ЦОРУС 7 передаются внешним потребителям непосредственно или через цифровую радиолинию в режиме реального времени, кроме того, обеспечивается возможность для считывания всех накопленных блоков радиолокационных измерений и результирующих РЛИ для постобработки средствами внешних потребителей.
Использование данного изобретения позволяет расширить функциональные возможности устройства, что проявляется в повышении дальнодействия и разрешающей способности радиолокатора, обеспечении стабильности работы радиолокатора в широком диапазоне траекторией нестабильности полета носителя, повышении информативности результирующих радиолокационных изображений.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| КОРОТКОИМПУЛЬСНЫЙ МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ОДНОЙ ПЛОСКОСТИ | 2011 |
|
RU2460089C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592076C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| МНОГОКАНАЛЬНЫЙ ЭЛЕМЕНТ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ ДЛЯ РАДИОЛОКАТОРА | 2010 |
|
RU2440587C1 |
| Многоканальный аппаратно-программный комплекс высокоскоростной цифровой обработки сигналов | 2018 |
|
RU2714493C2 |
| КОСМИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2020 |
|
RU2747240C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ Ku-ДИАПАЗОНА | 2021 |
|
RU2787574C1 |
| РАДИОЛОКАЦИОННО-ТОМОГРАФИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРОВЫХ ПОТОКОВ | 2023 |
|
RU2805031C1 |
| КОСМИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЮЩИЙ ИЗОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ | 1999 |
|
RU2158008C1 |
Изобретение может быть использовано в радиолокационных системах с высоким и ультравысоким разрешением. Достигаемый технический результат - повышение дальности действия и разрешающей способности радиолокатора, обеспечение стабильности работы, повышение информативности. В заявленном радиолокаторе вывод, по меньшей мере, одной приемной антенны, выполненной с возможностью изменения апертуры, соединен с первым входом малошумящего усилителя радиочастоты (МШУ), который выходом подключен к первому входу аналого-цифрового преобразователя (АЦП), первый выход модуля синхронизации (МС) связан со вторым входом МШУ и вторым входом АЦП, который первой шиной информационных данных подключен к первым информационным входам аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени (АПК), соединенного первым выходом с третьим входом МШУ, второй выход АПК подключен к первому входу генератора видеоимпульсов, соединенного выходом с выводом, по меньшей мере, одной передающей антенны, выполненной с возможностью изменения апертуры, второй и третий выходы МС связаны, соответственно, с первым и вторым управляющими входами АПК, который первой шиной управляющих данных подключен к управляющим входам АЦП, третий вход которого соединен с четвертым выходом МС, связанного пятым выходом со вторым входом генератора видеоимпульсов, шестой выход МС соединен с первым входом, по меньшей мере, одного датчика пространственного перемещения радиолокатора (ДПП), который выходом подключен ко входу МС, а второй шиной информационных данных соединен со вторыми информационными входами АПК, связанного второй шиной управляющих данных с управляющими входами МС, а третьей шиной управляющих данных - с управляющими входами, по меньшей мере, одного ДПП, при этом АПК выполнен с возможностью передачи данных по третьей шине информационных данных в цифровой радиоканал. 8 з.п. ф-лы, 1 ил.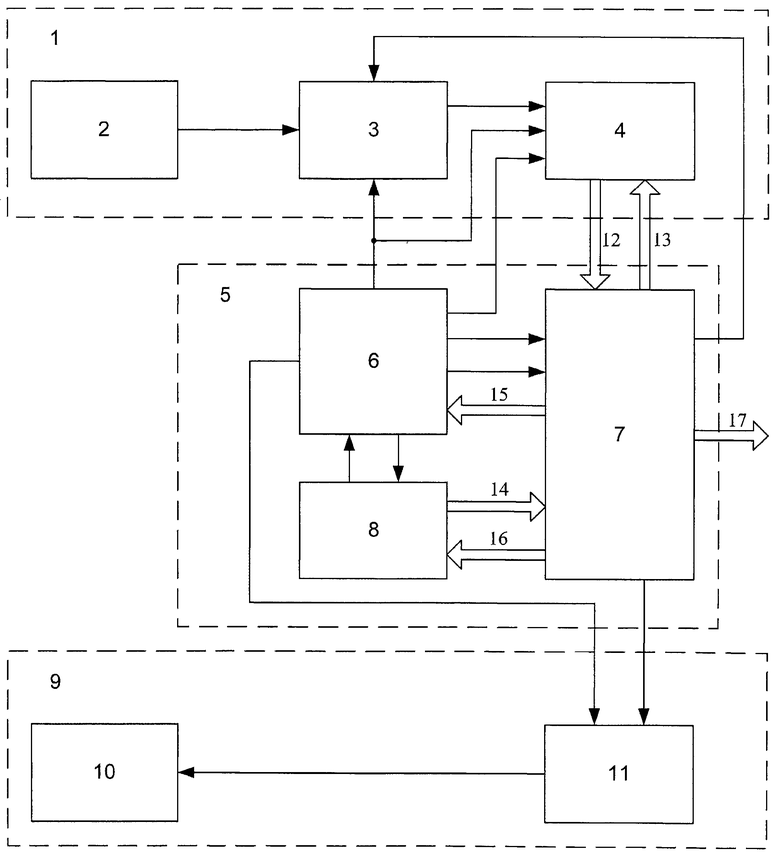
1. Радиолокатор бокового обзора Земли с синтезом апертуры антенны и ультравысоким разрешением, характеризующийся тем, что в нем вывод, по меньшей мере, одной приемной антенны, выполненной с возможностью изменения апертуры, соединен с первым входом малошумящего усилителя радиочастоты, который выходом подключен к первому входу аналого-цифрового преобразователя (АЦП), первый выход модуля синхронизации связан со вторым входом малошумящего усилителя радиочастоты и вторым входом АЦП, который первой шиной информационных данных подключен к первым информационным входам аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени, соединенного первым выходом с третьим входом малошумящего усилителя радиочастоты, второй выход аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени подключен к первому входу генератора видеоимпульсов, соединенного выходом с выводом, по меньшей мере, одной передающей антенны, выполненной с возможностью изменения апертуры, второй и третий выходы модуля синхронизации связаны соответственно с первым и вторым управляющими входами аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени, который первой шиной управляющих данных подключен к управляющим входам АЦП, третий вход которого соединен с четвертым выходом модуля синхронизации, связанного пятым выходом со вторым входом генератора видеоимпульсов, шестой выход модуля синхронизации соединен с первым входом, по меньшей мере, одного датчика пространственного перемещения радиолокатора, который выходом подключен ко входу модуля синхронизации, а второй шиной информационных данных соединен со вторыми информационными входами аппаратно-программного комплекса цифровой обработки данных, регистрации, управления и связи в режиме реального времени, связанного второй шиной управляющих данных с управляющими входами модуля синхронизации, а третьей шиной управляющих данных с управляющими входами, по меньшей мере, одного датчика пространственного перемещения радиолокатора, при этом аппаратно-программный комплекс цифровой обработки данных, регистрации, управления и связи в режиме реального времени выполнен с возможностью передачи данных по третьей шине информационных данных в цифровой радиоканал.
2. Радиолокатор по п.1, отличающийся тем, что, по меньшей мере, одна приемная антенна выполнена в виде одноэлементной антенны.
3. Радиолокатор по п.1, отличающийся тем, что, по меньшей мере, один датчик пространственного перемещения радиолокатора выполнен с возможностью непрерывного счисления текущих координат радиолокатора.
4. Радиолокатор по п.1, отличающийся тем, что, по меньшей мере, один датчик пространственного перемещения радиолокатора выполнен с возможностью регистрации положения фазового центра приемопередающей антенной системы, состоящей из, по меньшей мере, одной приемной антенны и, по меньшей мере, одной передающей антенны.
5. Радиолокатор по п.1, отличающийся тем, что АЦП содержит запоминающее устройство.
6. Радиолокатор по п.1, отличающийся тем, что аппаратно-программный комплекс цифровой обработки данных, регистрации, управления и связи в режиме реального времени содержит встроенный матричный многопроцессорный вычислитель.
7. Радиолокатор по п.6, отличающийся тем, что матричный многопроцессорный вычислитель выполнен с возможностью синтеза апертуры, по меньшей мере, одной приемной антенны и апертуры, по меньшей мере, одной передающей антенны.
8. Радиолокатор по п.1, отличающийся тем, что генератор видеоимпульсов выполнен с возможностью регулирования длительности видеоимпульсов.
9. Радиолокатор по п.1, отличающийся тем, что малошумящий усилитель радиочастоты выполнен с возможностью регулирования усиления в динамическом режиме.
| ROGER S | |||
| VICKERS et al | |||
| Result from f VHF synthetic-aperture radar | |||
| Устройство для автоматического пуска в ход тушащих приборов | 1923 |
|
SU1631A1 |
| АВИАЦИОННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА БОКОВОГО ОБЗОРА ЗЕМЛИ | 2000 |
|
RU2168186C1 |
| СИСТЕМА РАДИОЛОКАЦИОННОГО ОБЗОРА ЗЕМНОЙ ПОВЕРХНОСТИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 1984 |
|
SU1840425A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| US 6028549 A, 22.02.2000 | |||
| WO 2009106424 A1, 03.09.2003 | |||
| Устройство для формирования пакетов шестигранной формы из штучных цилиндрических грузов | 1976 |
|
SU576264A1 |

