Изобретение относится к радиолокации и может использоваться в авиационных радиолокационных системах для формирования радиолокационного изображения (РЛИ) земной (водной) поверхности.
Известен способ (аналог) формирования РЛИ с коррекцией миграции отметок по дальности [Купряшкин И.Ф., Лихачев В.П., Рязанцев Л.Б. Малогабаритные многофункциональные РЛС с непрерывным частотно-модулированным излучением. Монография. - М: Радиотехника, 2020. - 280 с., С. 82-85], включающий зондирование земной (водной) поверхности, прием отраженных сигналов, сжатие сигналов по дальности, коррекцию миграции по дальности, фокусировку, сжатие по азимуту и формирование РЛИ.
Недостатком данного способа является низкое качество фокусировки РЛИ при больших значениях угла наблюдения цели (угла между перпендикуляром к вектору скорости носителя РЛС и азимутальным направлением на цель), обусловленное большой величиной остаточных некомпенсированных фазовых искажений из-за сильной миграции точечных отражателей по путевой дальности за время синтезирования, величина которых увеличивается с ростом размера кадра РЛИ по путевой дальности [Л.А. Школьный Радиолокационные системы воздушной разведки, дешифрирование радиолокационных изображений. Учебник. - Типография ВВИА им. проф. Н.Е. Жуковского, 2008. - 531 с., С. 186-188].
Наиболее близким по сущности является способ (прототип) формирования детальных РЛИ [Дробот И.С., Рязанцев Л.Б., Купряшкин И.Ф., Лихачев В.П., Коков P.P., Гареев М.Ш. Способ формирования детальных радиолокационных изображений в РЛС с синтезированной апертурой антенны // Патент Российской Федерации № RU 2710961 С1. Опубл. 14.01.20, бюл. №2.], основанный на зондировании земной (водной) поверхности, приеме, оцифровке, сжатии по дальности отраженных сигналов, формировании двумерного дальностного портрета зоны обзора путем запоминания в течение времени синтезирования апертуры сжатых по дальности в каждом периоде зондирования сигналов, формировании выборок отсчетов траекторного сигнала из сформированного двумерного дальностного портрета в соответствии с законами миграции точечных отражателей для каждого элемента разрешения в пределах кадра формируемого РЛИ, расчете значений яркости каждого элемента разрешения РЛИ путем демодуляции сигналов сформированных выборок с последующим суммированием их отсчетов.
Как правило, при телескопическом режиме обзора земной (водной) поверхности размер кадра РЛИ по путевой дальности выбирают исходя из ширины ДН антенны в азимутальной плоскости. Однако при жестко закрепленной антенне (например, при установке РЛС на малоразмерные беспилотные летательные аппараты) и отсутствии возможности управления лучом ДН в пространстве (например, из-за массогабаритных ограничений) ширину кадра РЛИ по путевой дальности увеличивают с учетом положения луча ДН в азимутальной плоскости, определяемой максимальным значением угла сноса носителя РЛС для исключения выхода луча ДН за пределы кадра. Увеличение размера кадра приводит к пропорциональному увеличению количества элементов разрешения на РЛИ и, как следствие, к снижению скорости формирования РЛИ. Кроме того, для определения положение луча ДН в азимутальной плоскости необходима дополнительная информация от бортовой инерцирциально-навигационной системы, доплеровского измерителя скорости и угла сноса или от других датчиков.
Недостатком данного способа является низкая скорость формирования РЛИ из-за большого объема вычислений, обусловленного расчетом яркостей всех элементов разрешения РЛИ, находящихся как в луче, так и вне луча диаграммы направленности (ДН), а также зависимость от других бортовых навигационных датчиков.
Технический результат данного изобретения заключается в увеличении скорости формирования РЛИ и исключении дополнительных устройств оценки положения луча ДН в пространстве, что обеспечивает упрощение аппаратуры и снижение ее массогабаритных характеристик.
Технический результат достигается тем, что в известном способе, заключающемся в зондировании земной (водной) поверхности, приеме, оцифровке, сжатии по дальности отраженных сигналов, формировании двумерного дальностного портрета зоны обзора путем запоминания в течение времени синтезирования апертуры сжатых по дальности в каждом периоде зондирования сигналов, формировании выборок отсчетов траекторного сигнала из сформированного двумерного дальностного портрета в соответствии с законами миграции точечных отражателей для каждого элемента разрешения в пределах кадра формируемого РЛИ, расчете значений яркости каждого элемента разрешения РЛИ путем демодуляции сигналов сформированных выборок с последующим суммированием их отсчетов, согласно изобретению дополнительно после формирования двумерного дальностного портрета зоны обзора, производят вычисление средней доплеровской частоты принятого сигнала, определение угла сноса носителя РЛС, формирование массива координат элементов разрешения РЛИ, находящихся в пределах луча ДН, которые далее используют при формировании выборок отсчетов траекторного сигнала из сформированного двумерного дальностного портрета в соответствии с законами миграции точечных отражателей для каждого элемента разрешения в пределах луча ДН формируемого РЛИ.
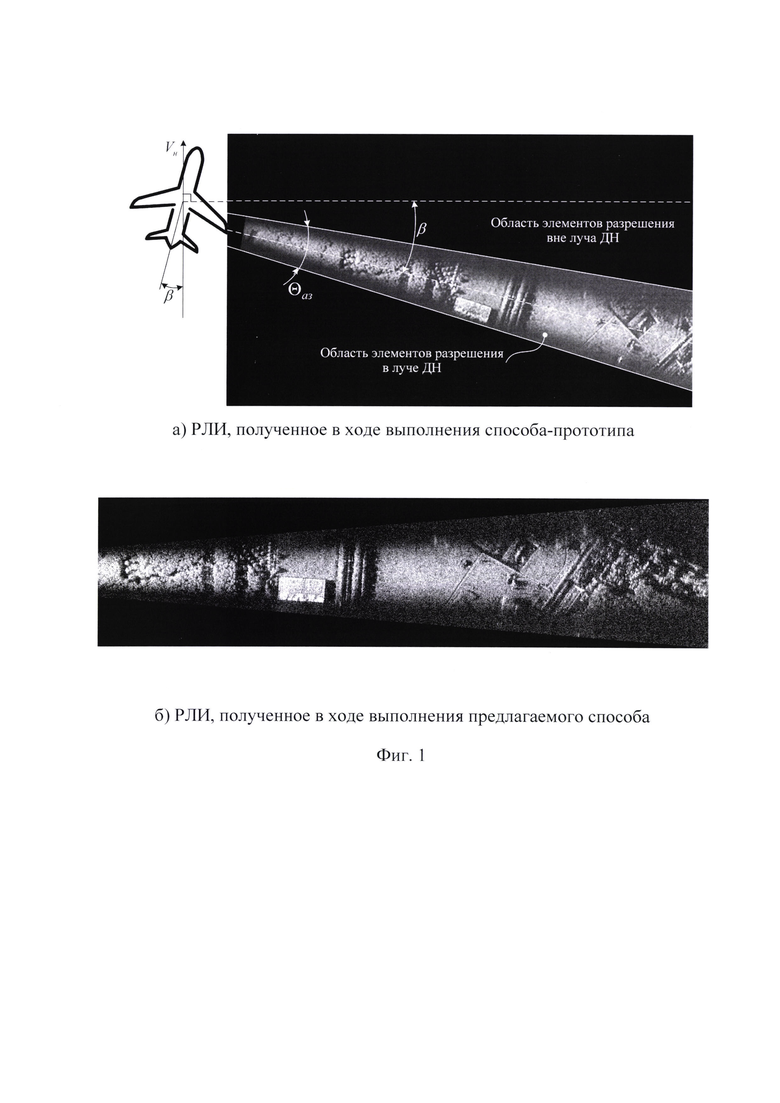
Сущность способа заключается в том, что уменьшение объема вычислений основано на исключении из процесса расчета при формировании РЛИ тех элементов разрешения РЛИ, которые находятся вне пределов луча ДН (фигура 1, а). Координаты элементов разрешения РЛИ, находящихся в пределах луча ДН, рассчитывают исходя из заданных значений ширины ДН антенны и полученных оценок угла сноса летательного аппарата (ЛА), наличие которого обусловлено боковым ветром.
Определение угла сноса ЛА осуществляют на основе оценки средней доплеровской частоты сигнала, отраженного от картографируемой поверхности. Для этого принятый РЛС сигнал с выхода приемного устройства в каждом периоде зондирования оцифровывают, демодулируют, сжимают по дальности и запоминают в виде двумерной матрицы SΣ, количество элементов K в строках которой соответствует количеству отсчетов сжатого сигнала в течение отдельного периода зондирования, а количество строк N - определяется количеством зондирований за время синтезирования апертуры антенны. Далее в каждом столбце матрицы осуществляют вычисление преобразования Фурье для получения спектра доплеровских частот

где ƒд - доплеровская частота; k=0,1,…,K и l=0,1,…,L - номера отсчетов по горизонтальной и путевой дальности соответственно; T - период повторения зондирующих импульсов.
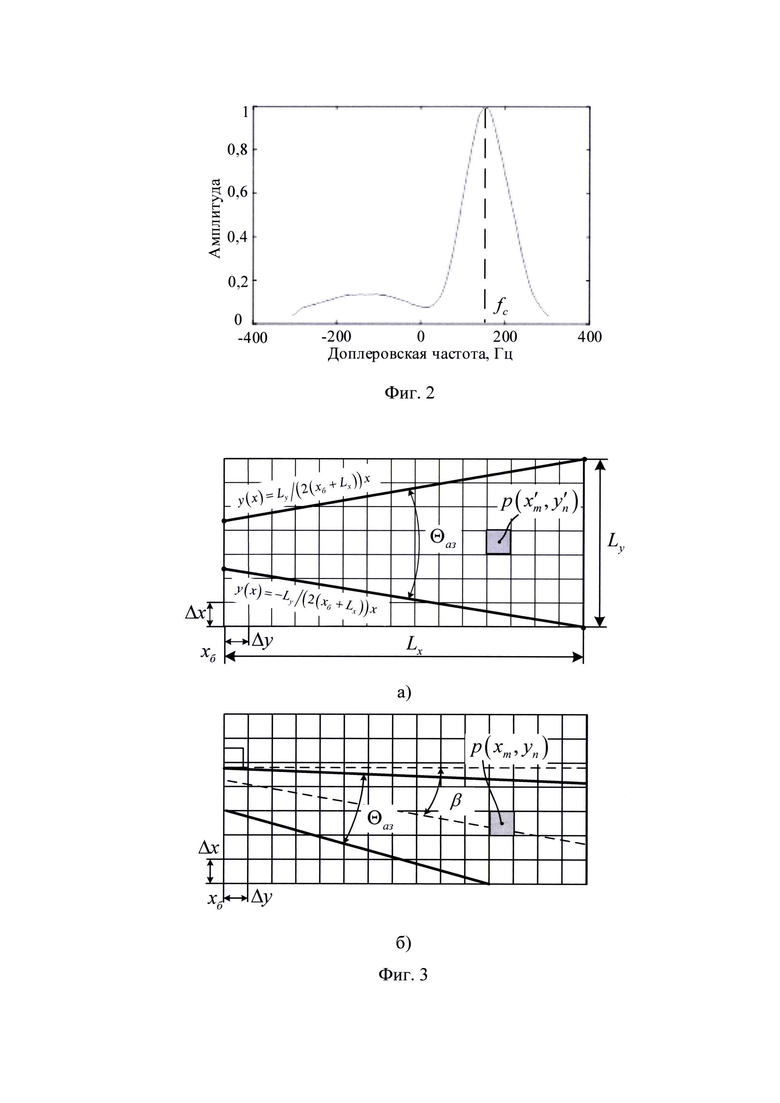
Для повышения точности оценки угла сноса производят усреднение спектра доплеровских частот полученной двумерной матрицы (1) по столбцам (фигура 2)

Среднее значение доплеровских частот определяют путем нахождения максимума усредненного спектра доплеровских частот

а значение угла сноса определяют по формуле

где λ=c/ƒ0 и ƒ0 - длина волны и частота зондирующего сигнала соответственно; с - скорость света; Vн - скорость полета носителя РЛС.
Формирование массива координат элементов разрешения РЛИ р(xm, yn), находящихся в пределах луча ДН (фигура 3) осуществляют в два этапа. На первом этапе производят расчет координат точек р(х'm, у'n) при нулевом значении угла сноса (фигура 3, а), на втором (фигура 3, б) - расчет координат точек р(xm, yn), осуществляемых путем применения операции поворота на плоскости на величину вычисленного угла сноса β к координатам точек р(х'm, у'n). Это обеспечивает сопоставление индексов элементов разрешения m и n на геометрически скорректированном РЛИ с координатами точек, находящимися в луче диаграммы направленности, отклоненном на величину угла сноса. Результатом является компенсация углового смещения на РЛИ, обусловленного наличием угла сноса.
Вычисление координат точек р(х'm, у'n) осуществляется на основе заданных параметров формируемого кадра РЛИ: удаления до ближней границы кадра хб, протяженности кадра по горизонтальной дальности Lx, а также размеров элементов разрешения по горизонтальной Δx и путевой Δу дальности. Значения координат элементов разрешения на земной поверхности, находящихся в пределах формируемого кадра РЛИ определяют в соответствии с выражениями

где m=0,1,…,Nx-1; n=0,1,…,Ny-1; Nx=Lx/Δx; Ny=Ly/Δy; Ly=2(хб+Lx)tg(Θаз/2); Θаз - ширина ДН антенны в азимутальной плоскости.
Координаты элементов разрешения в пределах луча ДН при наличии угла сноса вычисляют на основе геометрических трансформаций, основанных на применении математических операций поворота


На основе полученного массива координат элементов разрешения осуществляют вычисление значений оценок амплитуд сигнала для каждого m,n-го элемента разрешения в пределах зоны обзора РЛС, которая реализуется операцией согласованной фильтрации аналогично тому, как это делается в прототипе

где Son(Rm,n(k,l)) - опорный сигнал, представляющий собой сигнал с единичной амплитудой, фаза которого соответствует фазе демодулированного эхосигнала точечного отражателя, расположенного в m,n-м элементе разрешения зоны обзора;  - закон изменения дальности до точечного отражателя, расположенного в m,n-м элементе разрешения; h -высота полета носителя РЛС; t(k,l)=kΔt+Tl - отсчеты времени; Δt=1/Fs - частота дискретизации сигнала с выхода приемного устройства РЛС.
- закон изменения дальности до точечного отражателя, расположенного в m,n-м элементе разрешения; h -высота полета носителя РЛС; t(k,l)=kΔt+Tl - отсчеты времени; Δt=1/Fs - частота дискретизации сигнала с выхода приемного устройства РЛС.
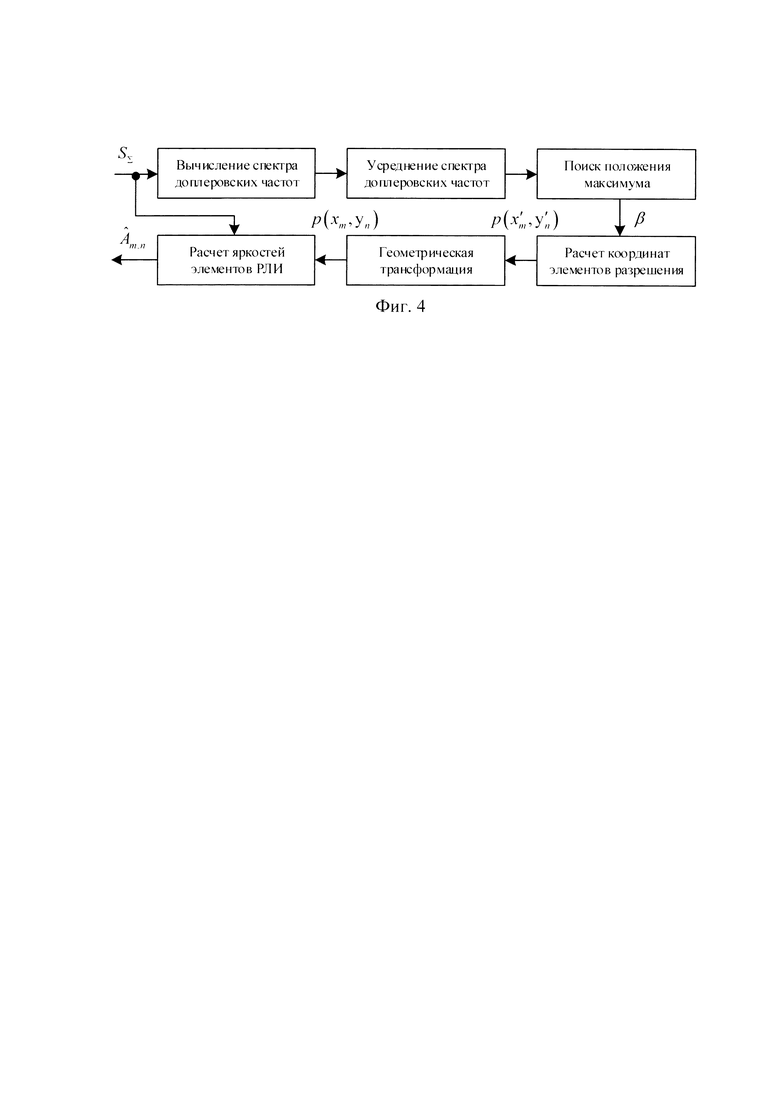
Последовательность действий при реализации алгоритма формирования РЛИ с компенсацией по углу сноса приведена на фигуре 4. РЛИ, полученное в ходе выполнения предлагаемого способа представлено на фигуре 1, б.
Таким образом, исключение из процесса формирования РЛИ элементов разрешения, находящихся вне луча ДН уменьшает время формирования РЛИ. Кроме того, получение оценки угла сноса на основе обработки сигнала, отраженного от земной (водной) поверхности, позволяет исключить дополнительные устройства (инерциально-навигационную систему, доплеровский измеритель скорости и угла сноса и др.), что обеспечивает упрощение аппаратуры и снижение ее массогабаритных характеристик.
Вариант устройства, реализующего предложенный способ, может быть выполнен на основе известных радиотехнических элементов, выпускаемых промышленностью.
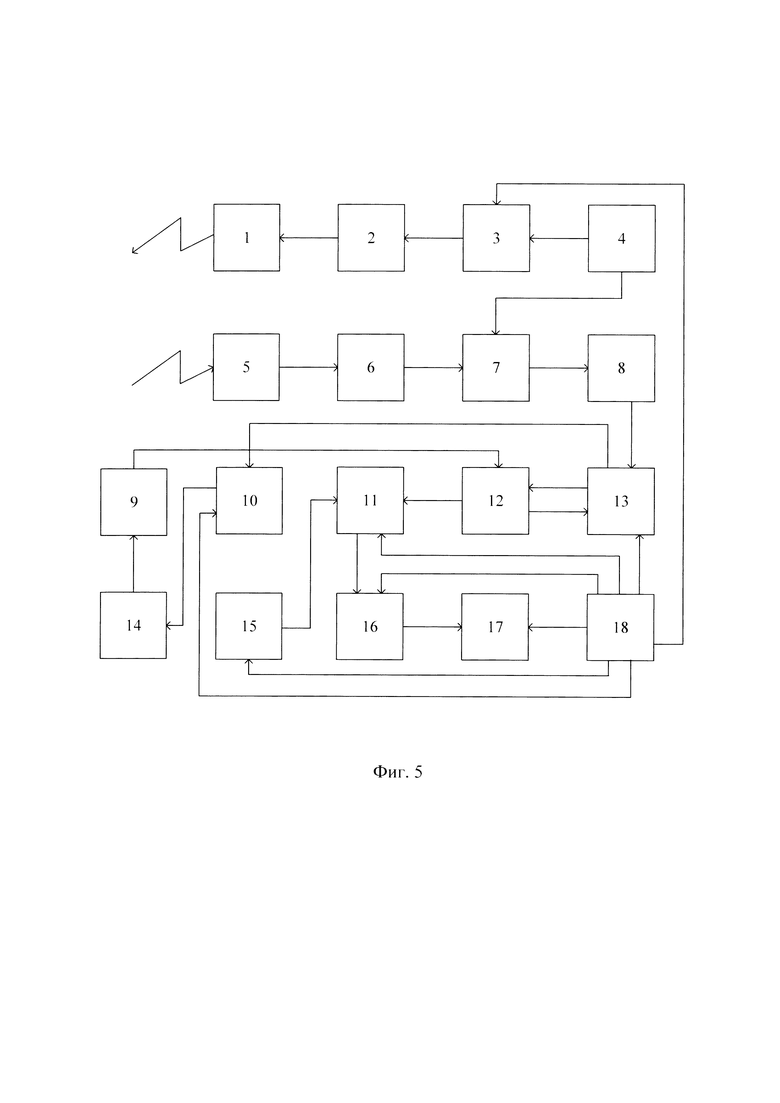
Устройство состоит из передающей антенны 1, передающего устройства 2, частотного модулятора 3, опорного генератора 4, приемной антенны 5, приемного устройства 6, аналого-цифрового преобразователя 7, коррелятора 8, устройства формирования массива координат элементов разрешения 9, вычислителя средней доплеровской частоты 10, умножителя 11, устройства выборки сигнала 12, запоминающего устройства 13, вычислителя угла сноса ЛА 14, устройства формирования опорного сигнала 15, сумматора 16, устройства отображения 17, устройство управления и синхронизации 18.
Представленный на фигуре 5 вариант устройства, реализующего предлагаемый способ формирования радиолокационных изображений в РЛС с синтезированной апертурой антенны, функционирует следующим образом.
Опорный генератор 4 вырабатывает стабильное гармоническое колебание на основе которого формируются несущая частота зондирующего сигнала и тактовый сигнал для аналого-цифрового преобразователя 7. Частотный модулятор 3 в начале каждого периода зондирования по сигналу устройства управления и синхронизации 18 формирует сигнал, который после переноса на несущую частоту в передающем устройстве 2 излучается в пространство передающей антенной 1. Приемная антенна 5 принимает отраженные от поверхности сигналы, которые поступают на вход приемного устройства 6, где демодулируются и усиливаются до напряжения, обеспечивающего работу аналого-цифрового преобразователя 7. Сигналы с выхода приемного устройства 6 оцифровываются аналого-цифровым преобразователем 7 и поступают на коррелятор 8, в котором осуществляется сжатие сигнала по дальности, после чего сигнал запоминается в запоминающем устройстве 13. По сигналу устройства управления и синхронизации 18 осуществляется вычисление средней доплеровской частоты из накопленного сигнала в запоминающем устройстве 13 вычислителем средней доплеровской частоты 10 в соответствии с выражениями (1)-(3), значение которой далее поступает на вычислитель угла сноса Л А 14 для расчета угла сноса ЛА в соответствии с выражением (4), после чего полученное значение поступает в устройство формирования массива координат элементов разрешения 9, в котором рассчитывается массив координат элементов разрешения РЛИ, находящихся в пределах основного луча ДН в соответствии с выражениями (5)-(7). Полученный массив координат поступает в устройство выборки сигнала 12, в котором для каждого элемента массива координат элементов разрешения РЛИ осуществляется выборка траекторного сигнала из запоминающего устройства 13. Отсчеты сигнала с его выхода поступают на первый вход умножителя 11, на второй вход которого поступают с выхода устройства формирования опорного сигнала 15 отсчеты опорного сигнала. Отсчеты результата перемножения поступают на сумматор 16, в котором осуществляется суммирование значений отсчетов, поступающих на его вход, и получение оценки яркости элемента разрешения РЛИ. Устройство отображения 17 осуществляет отображение сформированного РЛИ, значения отсчетов которого поступают с сумматора 16. Устройство синхронизации 18 осуществляет синхронизацию всех функциональных элементов устройства, реализующего предложенный способ.
Для подтверждения качества работы предложенного способа осуществлена его экспериментальная проверка с использованием малогабаритной РЛС С-диапазона «Квазар», являющейся совместной разработкой Военного учебно-научного центра Военно-воздушных сил «Военно-воздушная Академия им. проф. Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж) и АО «НПП «Радар ммс» (г. Санкт-Петербург). РЛС устанавливалась на беспилотном летательном аппарате «Феникс», производства ООО «НПП «НТТ» (г. Санкт-Петербург). Способ обеспечил точность оценки углов сноса до 0,5…3° (в зависимости от характера подстилающей поверхности) и снижение вычислительных затрат в 1,5…3 раза (в зависимости от величины угла сноса и размера кадра по горизонтальной дальности) по сравнению со способом прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ С ПРЕДВАРИТЕЛЬНОЙ ФОКУСИРОВКОЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2792964C2 |
| СПОСОБ ФОРМИРОВАНИЯ ДЕТАЛЬНЫХ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2018 |
|
RU2710961C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ | 2017 |
|
RU2656366C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| Способ формирования изображения земной поверхности в радиолокационной станции с синтезированием апертуры антенны | 2016 |
|
RU2614041C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ВЫЯВЛЕНИЯ ЗАКОНА ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ ПОВОРОТА СОПРОВОЖДАЕМОГО ВОЗДУШНОГО ОБЪЕКТА ПО ПОСЛЕДОВАТЕЛЬНО ПРИНЯТЫМ ОТРАЖЕНИЯМ СИГНАЛОВ С ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2013 |
|
RU2525829C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВРАЩАЮЩЕГОСЯ ПО КУРСУ, ТАНГАЖУ И КРЕНУ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ | 2006 |
|
RU2327190C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ МИГРАЦИИ ЦЕЛЕЙ ПО ДАЛЬНОСТИ | 2017 |
|
RU2673679C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
Изобретение относится к радиолокации и может использоваться в авиационных радиолокационных системах для формирования радиолокационного изображения (РЛИ) земной или водной поверхности. Технический результат заключается в увеличении скорости формирования РЛИ и исключении дополнительных устройств оценки положения луча ДН в пространстве, что обеспечивает упрощение аппаратуры и снижение ее массогабаритных характеристик. Заявленный способ заключается в зондировании земной или водной поверхности, приеме, оцифровке, сжатии по дальности отраженных сигналов, формировании двумерного дальностного портрета зоны обзора путем запоминания в течение времени синтезирования апертуры сжатых по дальности в каждом периоде зондирования сигналов, формировании выборок отсчетов траекторного сигнала из сформированного двумерного дальностного портрета в соответствии с законами миграции точечных отражателей для каждого элемента разрешения в пределах кадра формируемого РЛИ, расчете значений яркости каждого элемента разрешения РЛИ путем демодуляции сигналов сформированных выборок с последующим суммированием их отсчетов. После формирования двумерного дальностного портрета зоны обзора производят вычисление средней доплеровской частоты принятого сигнала, определение угла сноса носителя РЛС, формирование массива координат элементов разрешения РЛИ, находящихся в пределах луча ДН, которые далее используют при формировании выборок отсчетов траекторного сигнала из сформированного двумерного дальностного портрета в соответствии с законами миграции точечных отражателей для каждого элемента разрешения в пределах луча ДН формируемого РЛИ. 5 ил. 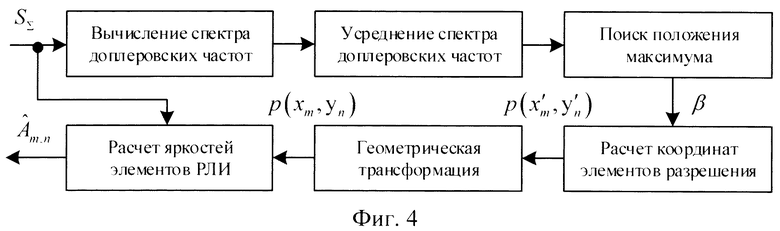
Способ формирования радиолокационных изображений (РЛИ), заключающийся в зондировании земной или водной поверхности, приеме, оцифровке, сжатии по дальности отраженных сигналов, формировании двумерного дальностного портрета зоны обзора путем запоминания в течение времени синтезирования апертуры сжатых по дальности в каждом периоде зондирования сигналов, формировании выборок отсчетов траекторного сигнала из сформированного двумерного дальностного портрета в соответствии с законами миграции точечных отражателей для каждого элемента разрешения в пределах кадра формируемого РЛИ, расчете значений яркости каждого элемента разрешения РЛИ путем демодуляции сигналов сформированных выборок с последующим суммированием их отсчетов, отличающийся тем, что после формирования двумерного дальностного портрета зоны обзора производят вычисление средней доплеровской частоты принятого сигнала, определение угла сноса носителя РЛС, формирование массива координат элементов разрешения РЛИ, находящихся в пределах луча диаграммы направленности (ДН), осуществляют в два этапа, на первом из которых производят расчет координат точек элементов разрешения РЛИ при нулевом значении угла сноса, а на втором – расчет координат точек элементов разрешения РЛИ путем применения операции поворота на плоскости на величину определенного угла сноса носителя РЛС к координатам точек элементов разрешения РЛИ, осуществляя сопоставление индексов элементов разрешения РЛИ на геометрически скорректированном РЛИ с координатами точек, находящимися в луче ДН, отклоненном на величину угла сноса носителя РЛС, при этом сформированный массив координат элементов разрешения РЛИ используют при формировании выборок отсчетов траекторного сигнала из сформированного двумерного дальностного портрета в соответствии с законами миграции точечных отражателей для каждого элемента разрешения в пределах луча ДН формируемого РЛИ.
| СПОСОБ ФОРМИРОВАНИЯ ДЕТАЛЬНЫХ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2018 |
|
RU2710961C1 |
| Способ построения радиолокационного изображения с помощью радиолокационной станции с синтезированной апертурой | 2017 |
|
RU2661941C1 |
| Способ построения панорамного радиолокационного изображения объекта | 2016 |
|
RU2629372C1 |
| ТРИАНГУЛЯЦИОННЫЙ СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЦЕЛИ В РЛС СОПРОВОЖДЕНИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ. | 1995 |
|
RU2099742C1 |
| DE 4427657 A1, 15.02.1996 | |||
| CN 106054188 A, 26.10.2016 | |||
| US 11029403 B2, 08.06.2021. | |||
