Область техники, к которой относится изобретение
Изобретение относится к области военной технике и может быть использовано для поражения, летящего со скоростью до 7 км/с объекта, противоракетой летящей со скоростью 0,3 км/с
Уровень техники
Известен способ поражения летящего объекта с участием: противоракеты, которая запускается с мобильной пусковой установки на базе шасси транспортной машины МАЗ-537 со специальным транспортным прицепом, снабженной радиолокационной станцией, которая отслеживает запуск объекта, расчитывает предполагаемую траекторию его полета, отслеживает фактическую траекторию полета, осуществляет ввод полетного задания в головку противоракеты, коррекцию траектории ее полета, непрерывный подсвет цели; устройства наведения, которое наводит противоракету на цель со стартового положения, корректирует ее полет; командного пункта, с помощью которого осуществляется запуск противоракеты, а при необходимости и ее уничтожение.
Противоракета состоит из следующих основных элементов: боевая часть, бортовая аппаратура наведения, автопилот с комплектом рулевых машин, двигателей первой и второй ступени. Бортовая радиоаппаратура управления предназначается для приема команд управления полетом противоракеты и выдачи их на автопилот, а также для приема разовых команд, управляющих тягой маршевого двигателя и подрывом боевой части; автопилот предназначается для управления рулевыми машинами противоракеты, поворотными двигателями и воздушными рулями и для стабилизации противоракеты относительно трех взаимно перпендикулярных осей, а также для перехода на самонаведение за 10 с до подлета к цели [http://vko.ru, http://militaryrussia.ru].
Недостатком способа является то, что он не позволяет поражать ракеты, летящие со скоростью более 0,3 км/с.
Данный способ выбран в качестве прототипа.
Раскрытие изобретения
Техническим результатом является поражение быстролетящего объекта противоракетой летящей с меньшей скоростью.
Способ поражения быстролетящего объекта, скорость которого составляет 6-7 км/с осуществляется с помощью противоракеты летящей со скоростью 0,3-0,5 км/с, которая запускается с мобильной пусковой установки, которая осуществляет ввод полетного задания в головку противоракеты, непрерывный подсвет противоракеты, корректирует траекторию ее полета; устройства наведения, которое ориентирует противоракету на цель в стартовом положении, корректирует ее полет; командного пункта, который осуществляет запуск противоракеты, а при необходимости и ее самоуничтожение;
противоракета, состоит из следующих основных элементов: боевой части, бортовой аппаратуры наведения, автопилота с комплектом рулевых машин, двигателей первой и второй ступени; бортовой радиоаппаратуры для приема команд управления полетом противоракеты и выдачи их на автопилот, а также для приема разовых команд, управляющих тягой маршевого двигателя и подрывом боевой части; автопилота для управления рулевыми машинами противоракеты, поворотными двигателями и воздушными рулями и для стабилизации противоракеты относительно трех взаимно перпендикулярных осей, отличающийся тем, что
дополнительно предусмотрена радиолокационная станция дальнего обнаружения запуска и отслеживания фактической траектории полета быстролетящего объекта и противоракеты, которая позволяет осуществить коррекцию полета противоракеты и вывести ее на траектории полета объекта, а также переход на самонаведение противоракеты за 2-3 с до подлета к цели с учетом скорости полета быстролетящего объекта и летящей навстречу противоракеты.
Краткое описание чертежей
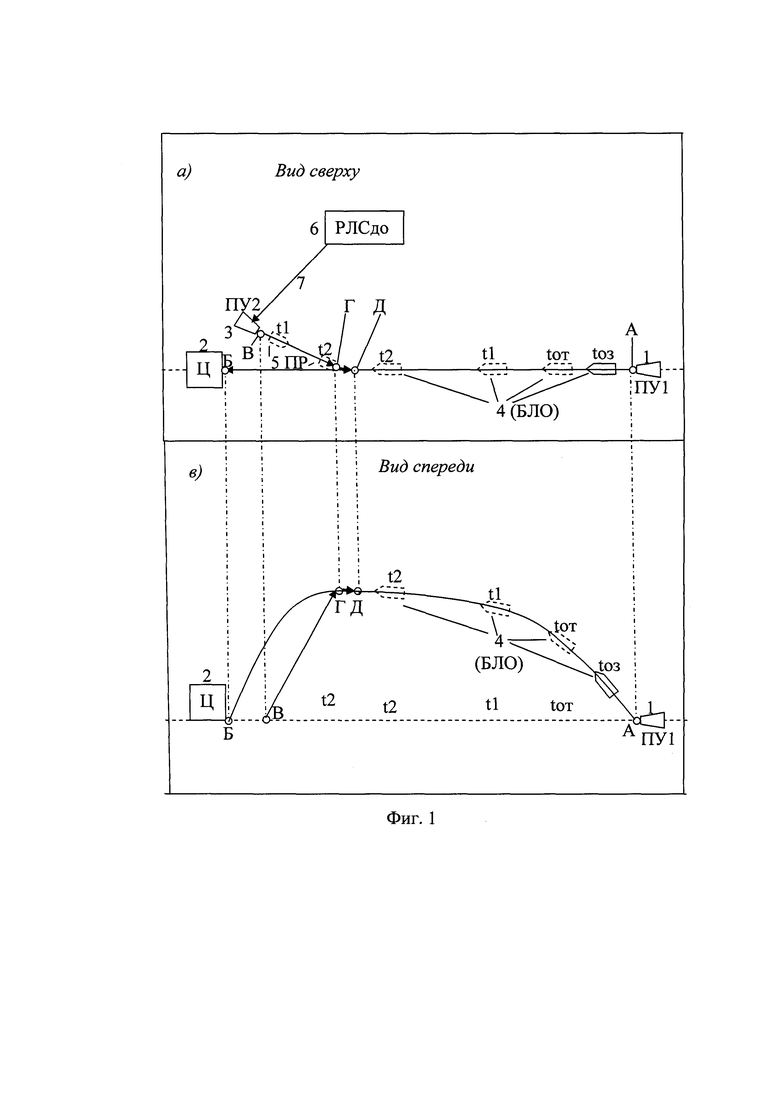
На фиг. 1 представлен вид сверху (а) и вид спереди (в) траектории быстролетящего объекта и противоракеты, а также расположение пусковых установок и цели.
Осуществление изобретения
На фиг. 1 приведены следующие условные обозначения:
1 - первая пусковая установка ПУ1;
2 - цель Ц;
3 - вторая пусковая установка ПУ2;
4 - быстролетящий объект БЛО;
5 - противоракета ПР;
6 - радиолокационная станция дальнего обнаружения РЛСдо;
7 - радиоканал между РСЛдо и ПУ2;
tоз - время (момент) обнаружения запуска;
tот - время (момент) определения траектории полета БЛО:
t1 - первая временная метка полета;
t2 - вторая временная метка полета.
Траектория полета БЛО 4 и ПР 5 на фиг. 1 (вид верху а и спереди в) изображена линиями АБ и ВГ. БЛО 4 стартует с пусковой установки ГТУ1, ПР 5 - с пусковой установки ПУ2 3. БЛО 4 предназначена для поражения цели Ц 2, ПР 5 - БЛО 4. Запуск ПР 5 осуществляется с таким расчетом, чтобы вывеси ее в точку Г на траекторию полета БЛО 4, а затем изменить курс и направить в сторону БЛО 4. После изменения курса ПР 5 летит по траектории, показанной стрелкой ГД. Ее полет проходит под управлением приборов самонаведения ПР 5. В точке Д происходит столкновение и подрыв ПР 5 и БЛО 4.
Контроль за полетом БЛО 4 и ПР 5 осуществляется с радиолокационной станции дальнего обнаружения РЛСдо. Информация с РЛСдо передается по радиоканалу 7 на ПУ2. В момент времени tоз происходит обнаружения запуска БЛО 4, в момент времени tот осуществляется расчет траектории полета БЛО 4 и последующий запуск ПР 5. В моменты времени t1 и t2 отмечены местонахождения БЛО 4 и ПР 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ ЛЕТЯЩЕГО ПЕРЕМЕННЫМ КУРСОМ И ВЫСОТОЙ ОБЪЕКТА | 2020 |
|
RU2741133C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РЕАКТИВНЫХ СНАРЯДОВ | 2020 |
|
RU2747681C1 |
| Способ управления полетом реактивных снарядов и система для его осуществления | 2023 |
|
RU2814323C1 |
| Способ управления полетом реактивных снарядов и система для его осуществления | 2023 |
|
RU2818701C1 |
| Способ управления полетом реактивных снарядов и система для его осуществления | 2023 |
|
RU2826067C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БОЕВОЙ РАКЕТЫ | 2019 |
|
RU2748503C2 |
| КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ БОЕВОГО ПРИМЕНЕНИЯ | 2017 |
|
RU2713546C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ, ПРЕДНАЗНАЧЕННОЙ ДЛЯ ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ ПРОТИВНИКА | 2011 |
|
RU2488769C2 |
| ПРОТИВОВОЗДУШНЫЙ АВТОНОМНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС САМООБОРОНЫ ПОДВОДНЫХ ЛОДОК ("ПАУК" СО ПЛ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2008 |
|
RU2382313C2 |
| ПОДВОДНАЯ БЕСПИЛОТНАЯ РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2710039C1 |
Изобретение относится к военной технике. Способ поражения летящего объекта, скорость которого составляет 6-7 км/с, заключается в том, что осуществляют поражение летящего объекта с помощью противоракеты, летящей со скоростью 0,3-0,5 км/с, которую запускают с мобильной пусковой установки. Мобильная пусковая установка осуществляет ввод полетного задания в головку противоракеты, непрерывный подсвет противоракеты, корректирует траекторию ее полета. Устройство наведения ориентирует противоракету на цель в стартовом положении, корректирует ее полет. Командный пункт осуществляет запуск противоракеты. Противоракета состоит из боевой части, бортовой аппаратуры наведения, автопилота с комплектом рулевых машин, двигателей первой и второй ступеней, бортовой радиоаппаратуры, автопилота. Предусмотрена радиолокационная станция дальнего обнаружения запуска и отслеживания фактической траектории полета летящего объекта и противоракеты, которая позволяет осуществить коррекцию полета противоракеты и вывести ее на траектории полета объекта. Достигается повышение эффективности поражения летящего объекта. 1 ил.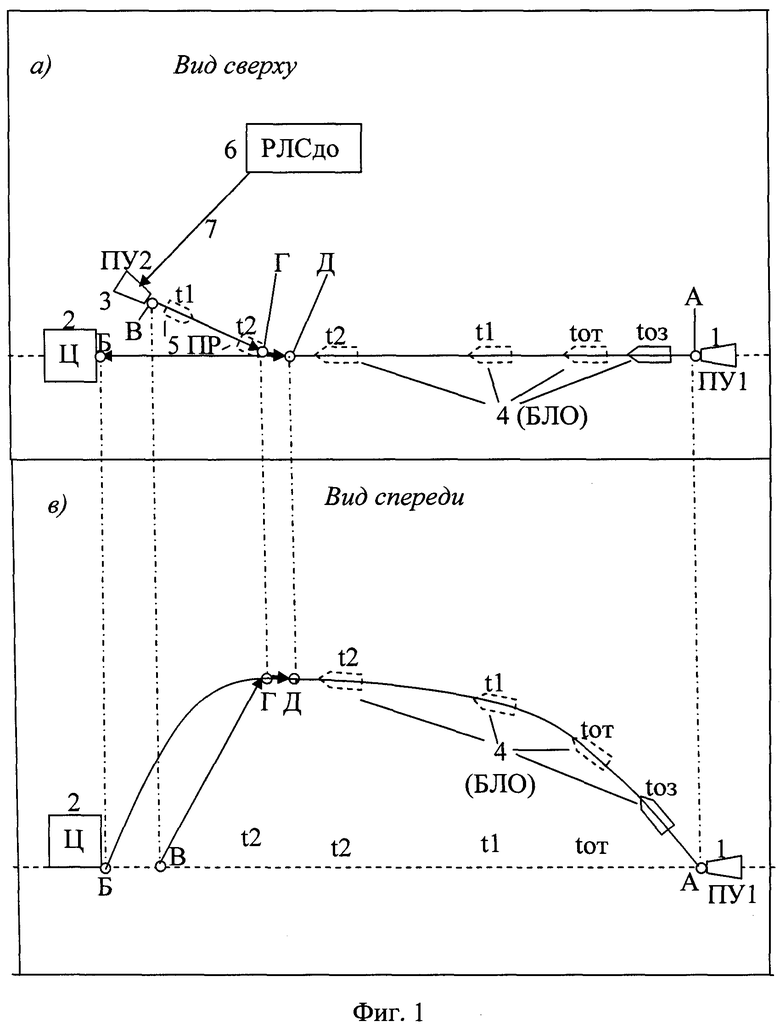
Способ поражения летящего объекта, скорость которого составляет 6-7 км/с, осуществляется с помощью противоракеты, летящей со скоростью 0,3-0,5 км/с, которая запускается с мобильной пусковой установки, которая осуществляет ввод полетного задания в головку противоракеты, непрерывный подсвет противоракеты, корректирует траекторию ее полета; устройства наведения, которое ориентирует противоракету на цель в стартовом положении, корректирует ее полет; командного пункта, который осуществляет запуск противоракеты, а при необходимости и ее самоуничтожение;
противоракета состоит из следующих основных элементов: боевой части, бортовой аппаратуры наведения, автопилота с комплектом рулевых машин, двигателей первой и второй ступеней; бортовой радиоаппаратуры для приема команд управления полетом противоракеты и выдачи их на автопилот, а также для приема разовых команд, управляющих тягой маршевого двигателя и подрывом боевой части; автопилота для управления рулевыми машинами противоракеты, поворотными двигателями и воздушными рулями и для стабилизации противоракеты относительно трех взаимно перпендикулярных осей, отличающийся тем, что
дополнительно предусмотрена радиолокационная станция дальнего обнаружения запуска и отслеживания фактической траектории полета летящего объекта и противоракеты, которая позволяет осуществить коррекцию полета противоракеты и вывести ее на траектории полета объекта, а также переход на самонаведение противоракеты за 2-3 с до подлета к цели с учетом скорости полета летящего объекта и летящей навстречу противоракеты.
| СПОСОБ БОГДАНОВА ПОРАЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2586436C1 |
| US 9335127 B1, 10.05.2016 | |||
| US 5495787 A1, 05.03.1996 | |||
| US 9250043 B1, 02.02.2016. | |||

