Область техники, к которой относится изобретение
Изобретение относится к области военной технике и может быть использовано для уничтожения боевой техники и живой силы противника.
Уровень техники
Известна беспилотная подводная лодка, предназначенная для защиты РФ от посягательств агрессоров с большим военным потенциалом [Представлена в докладе президента В.В. Путина 20 февраля 2019 г. на встрече с журналистами].
Недостатком является (параметры подводной лодки не разглашаются, могу предположить) высокая стоимость изготовления.
Известна Беспилотная боевая машина ББМ и система дистанционного управления движением и вооружением беспилотной боевой машиной [Патент 2671138 (РФ). Беспилотная боевая машина и система дистанционного управления движением и вооружением беспилотной боевой машиной / Полевой Ю.И. - Опубл. 29.10. 2018 Бюл. №31, МПК В64С 39/02]. В бою ББМ управляется с командного пункта, бойцом, который находится под днищем машины или в специально подготовленном укрытии вблизи от машины, а также по предварительно введенной или откорректированной программе в память ЭВМ. ББП имеет двигатель, ракетную установку, пушку, пулемет, ЭВМ, электромеханические устройства управления двигателем, рулем, вооружением, приемник ГЛОНАСС для определения своих координат на местности, радиосвязь с бойцом и командным пунктом, землеройную технику для создания укрытия для бойца и ББМ. В памяти ЭВМ хранится информация о карте местности, координаты целей и могут корректироваться с КП.
Недостатками являются: невысокая огневая мощь, нельзя перемещаться под водой.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом является скрытное размещение мощной боевой системы в непосредственной близости от границ противника, снижение затрат на запуск и обслуживание ракет с разделяющимися самонаводящимися и управляемыми (по программе или с командного пункта) головками. Полет ракет происходит по «непредсказуемой» траектории.
Подводная беспилотная ракетная система, управляемая с командного пункта, с мобильными базовыми объектами, мобильными пусковыми установками, которые оснащены электромеханическими устройствами управления движения и вооружением, спутниковой системой навигации, ЭВМ с электронной картой театра военных действий и координатами целей, которые могут изменяться с командного пункта, отличающаяся тем, что дополнительно имеет командные пункты наземного и подводного базирования, удаленные на расстоянии 100-10000 км от предполагаемого театра военных действий;
подводные мобильные базы с атомными энергоустановками с запасом топлива на 3-10 лет и комплектом летящих переменным курсом самонаводящихся и управляемых ракет с разделяющимися боеголовками с неядерным или ядерным зарядом;
подводные мобильные пусковые ракетные установки с электрическими ходовыми двигателями, работающие от аккумуляторов большой емкости, которые после их разрядки заменяют на заряженные аккумуляторы на мобильных базах, где пополняют и комплект ракет;
подводные мобильные узлы связи, которые периодически, посредством радиостанций и всплывающих антенн, передают и принимают информацию с командных пунктов, информацию записывают в память для дальнейшей передачи ее на базы и пусковые установки;
все мобильные устройства находятся на глубине от 10 до 200 м и непрерывно перемещаются с переменной скоростью, и курсом по программе, записанной в ЭВМ мобильных устройств, которая может быть скорректирована с командного пункта;
выполнение скорректированной программы начинается после рассылки измененных программ на все мобильные устройства со времени «Ч» для того, чтобы на каждом мобильном устройстве была информация о координатах (долгота, широта, глубина) других устройств и выполняемых ими функций для того, чтобы мобильные узлы связи осуществляли обмен информацией между подводными мобильными устройствами и командными пунктами;
все устройства, как правило, находятся на большой глубине и всплывают на «антенную» (синоним: «перископную») глубину при запуске ракет, зарядке аккумуляторных батарей, обмене сообщениями с командными пунктами, при этом на дежурстве, для связи с командными пунктами, одновременно находятся не менее двух узлов связи;
мобильные устройства выполняют следующие операции: базы осуществляют снабжение электроэнергией пусковых установок и узлов связи, хранение и снабжение боевыми ракетами пусковых установок; пусковые установки - запуск ракет, узлы связи - передачу электронных сообщений между подводными узлами и связь с командными пунктами;
базовые узлы и пусковые установки имеют радиостанции со всплывающими антеннами для связи с командными пунктами во временные интервалы, указанные в программах для ЭВМ, а также для уточнения координат их местонахождения по приборам спутниковой навигации.
Краткое описание чертежей
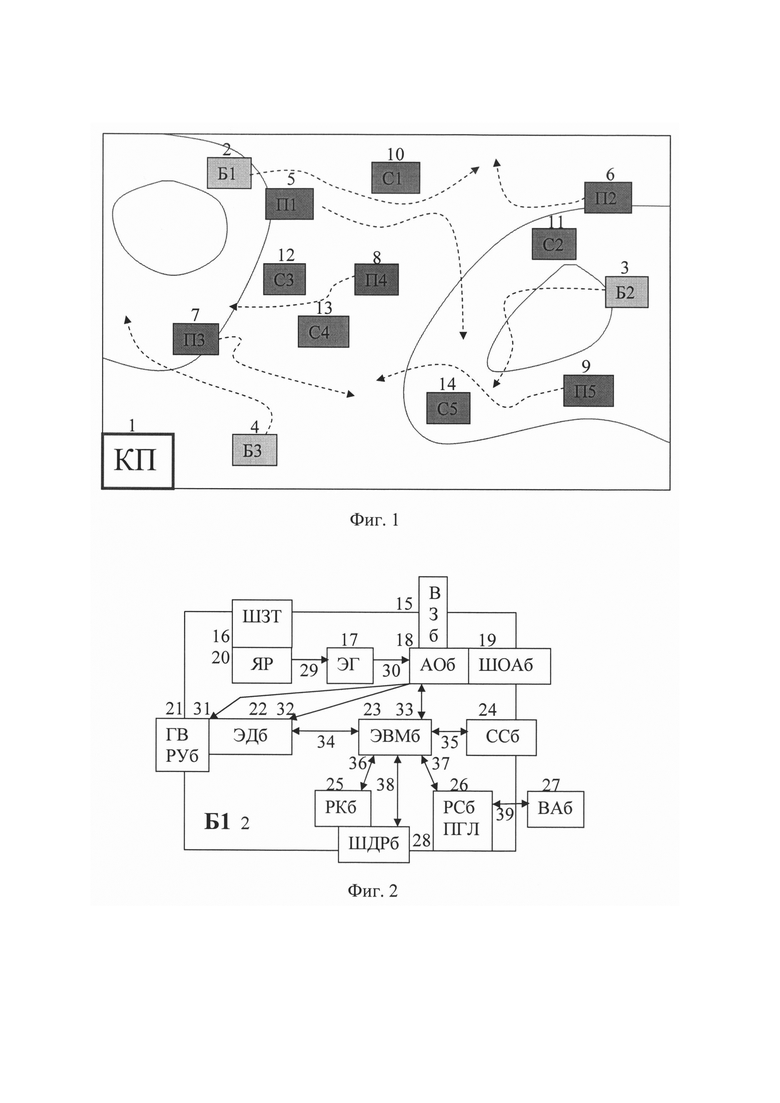
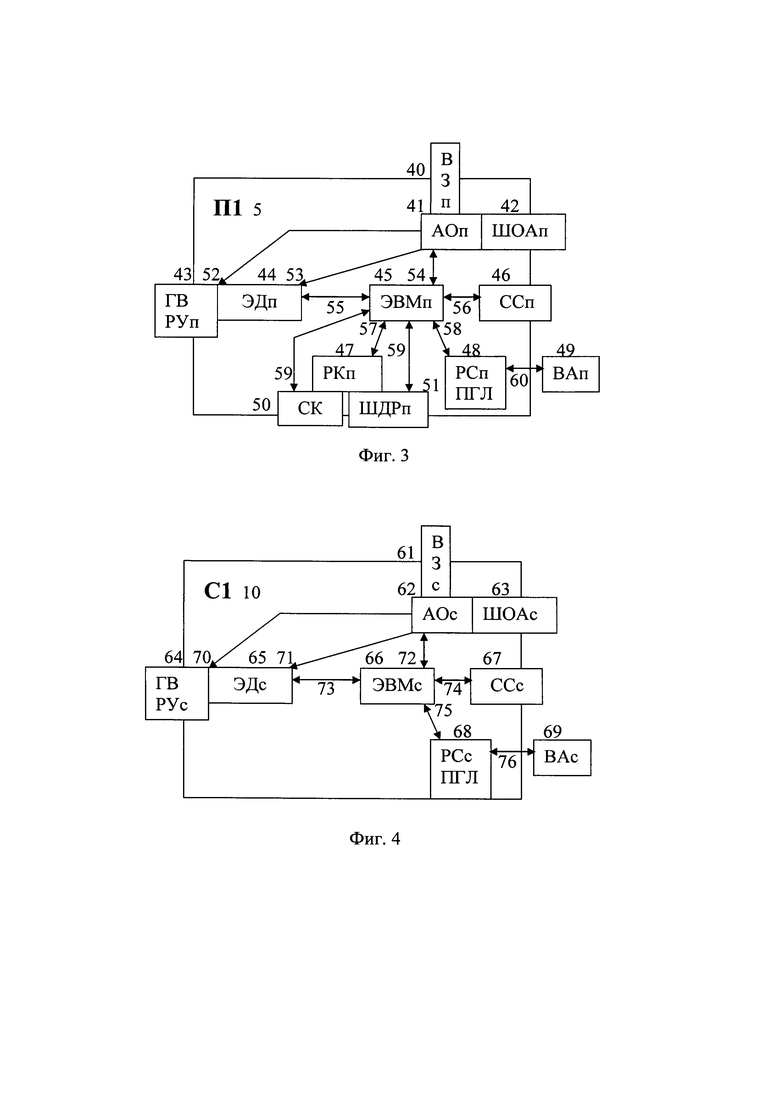
На фиг. 1 изображена схема расположения подводных мобильных узлов системы на момент времени Ч; на фиг. 2 - структурная схема базы; на фиг. 3 - структурная схема пусковой установки; на фиг. 4 - структурная схема установки связи.
Осуществление изобретения
Условные обозначения:
1 - командный пункт КП;
2 - первая база Б1;
3 - вторая база Б2;
4 - третья база Б3;
5 - первая пусковая установка ПУ1;
6 - вторая пусковая установка ПУ2;
7 - третья пусковая установка ПУ3;
8 - четвертая пусковая установка ПУ4;
9 - пятая пусковая установка ПУ5;
10 - первый узел связи С1;
11 - второй узел связи С2;
12 - третий узел связи С3;
13 - четвертый узел связи С4;
14 - пятый узел связи С5;
15 - воздухозаборник базы ВЗб;
16 - шлюз загрузки топлива базы ШЗТ;
17 - энергогенератор базы ЭГ;
18 - аккумуляторный отсек базы АОб;
19 - шлюз обмена аккумуляторами базы ШОАб;
20 - ядерный реактор ЯР;
21 - гребные винты и рулевое управление базы ГВРУб;
22 - электродвигатели базы ЭДб;
23 - ЭВМ базы ЭВМб;
24 - стык связи базы ССб;
25 - ракетный контейнер базы РКб;
26 - радиостанция базы РСб и приемник ГЛОНАСС-ПГЛ;
27 - всплывающая антенна базы ВАб;
28 - шлюз доставки ракет базы ШДРб;
29-39 внутренние соединения базы;
40 - воздухозаборник пусковой установки ВЗп;
41 - аккумуляторный отсек пусковой установки АОп;
42 - шлюз обмена аккумуляторами пусковой установки ШОАп;
43 - гребные винты и рулевое управление пусковой установки ГВРУп;
44 - электродвигатели пусковой установки ЭДп;
45 - ЭВМ пусковой установки ЭВМп;
46 - стык связи пусковой установки ССп;
47 - ракетный контейнер пусковой установки РКп;
48 - радиостанция пусковой установки РСп и приемник ГЛОНАСС-ПГЛ;
49 - всплывающая антенна пусковой установки ВАп;
50 - стартовый комплекс СК;
51 - шлюз доставки ракет пусковой установки ШДРп;
52-60 внутренние соединения пусковой установки;
61 - воздухозаборник узла связи ВЗс;
62 - аккумуляторный отсек узла связи АОс;
63 - шлюз обмена аккумуляторами узла связи ШОАс;
64 - гребные винты и рулевое управление узла связи ГВРУс;
65 - электродвигатели узла связи ЭДс;
66 - ЭВМ узла связи ЭВМс;
67 - стык связи узла связи ССс;
68 - радиостанция узла связи РСс и приемник ГЛОНАСС-ПРГ;
69 - всплывающая антенна узла связи ВАс;
70-76 - внутренние соединения узла связи.
На фиг. 1 приведена карта театра военных действий со схемой расположения мобильных устройств на момент времени Ч. Основной командный пункт (КП) 1 и дублирующие командные пункты (на фиг. 1 не представлены) располагаются на значительном расстоянии от места дислокации баз (Б) Б1 2, Б2 3 и Б3 4; пусковых установок (П) П1 5, П2 6, П3 7, П4 8, П5 9; узлов связи (С) С1 10, С2 11, С3 12, С4 13, С5 14. ПУ и СУ перемещаются по маршрутам, указанным во фрагменте программы для ЭВМ Б, П и С (во фрагменте программы, общей для всех мобильных устройств, указываются координаты этих устройств для любого отрезка времени) для взаимного отслеживания их места нахождения. С приписаны к Б или П и осуществляют внутренние передвижения и связи между ними и связь с КП.
На фиг. 2 представлена структурная схема базы Б1 2 (аналогичные схемы у Б2 3 и Б3 4). Б1 2 снабжена ядерным реактором ЯР 20 и энергогенератором ЭГ 27 для выработки электроэнергии для нужд Б (Б1 2 и др.), П (П1 5 и др.) и С (С1 10 и др.). В Б1 2 ЯР 29 и ЭГ 17 соединены между собой гидравлической системой энергопередачи 29. ЭГ 17 вырабатывает и снабжает электроэнергией по связи 30 аккумуляторный отсек АОб 18 для зарядки аккумуляторных батарей Б и подменных батарей для П и С. Зарядка аккумуляторных батарей осуществляется при всплытии Б на уровень 10 м от поверхности воды, при этом воздухозаборная труба ВЗб 15 позволяет осуществить воздухообмен АОб 18 с атмосферой. Заряженные аккумуляторы через шлюз обмена аккумуляторами ШОАб 19 передаются на П и С, а разряженные с П и С забираются в АОб 18 для зарядки. Все механические перемещения на Б, П и С осуществляются под управлением ЭВМ мобильных устройств. В частности, на Б1 2 замена аккумуляторов осуществляет под управлением ЭВМб 23 по связи 33. Энергия с аккумуляторов отсека АОб 18 по связям 31 и 32 передается на гребные винты и рулевое управление ГВРУб 21 и электродвигатели ЭДб 22. Регулирование передвижений П осуществляется также с участием ЭВМб 23 по связи 34.
Обмен информацией между КП 1 и Б1, когда Б1 2 находится в глубоководном положении, осуществляется посредством С1 10 (и др. С), которая подходит к стыку связи ССб 24 и по связи 35 информация передается на ЭВМб 23. При нахождении Б на небольшой глубине, может подниматься всплывающая антенна ВАб 27 и с участием связи 39, радиостанции и приемника ГЛОНАСС РСбПГЛ 26 информация с КП 1 и спутниковой системы навигации передается по связи 37 на ЭВМб 23.
Для загрузки ракет на П (П1 5, см. фиг. 3) к шлюзу доставки ракет ТТТДРб 28 (фиг. 2) пристыковывается П (П1 5 и др.), на нее перегружаются ракеты из ракетного контейнера РКб 25 с участием связей 36 и 38. Для пополнения запаса ядерного топлива служит шлюз заправки топливом ШЗТ 16.
Так снабжаются энергией П и С (посредством заряженных аккумуляторов), пополняются ракетами П, обмениваются информацией Б, П и С.
На фиг. 3 изображена структурная схема П, а на фиг. 4 - структурная схема С. Функции большинства узлов на Б, П и С совпадают. В частности ВЗ (ВЗб 15, ВЗп 40 и ВЗс 61) выполняют одинаковые функции, узлы и АО (18, 41, 62), ШОА (19, 42, 63), ГВРУ (21, 43, 64), ЭД (22, 44, 65), ЭВМ (23, 45, 66), СС (24, 46, 67), РСПГЛ (26, 48, 68) и ВА (27, 49, 69) выполняют схожие функции. Связи 31, 52, 70 имеют одинаковое назначение, это же относится и к связям 32, 53, 71; 33, 54, 72; 34, 55, 73; 35, 56, 74; 37, 58, 75; 39, 60, 76.
Шлюз доставки ракет ШДРп 51 пристыковывается к шлюзу ШДРб 28, в ШДРп 51 загружаются ракеты под управлением ЭВМп 45 и связи 59, затем ракеты перезагружаются в ракетный контейнер РКп 47 с участием связи 57, где хранятся до начала запуска. Затем ракеты передаются на стартовый комплекс СК 50 с участием связи 59 и осуществляется их пуск.
На фиг. 4 представлена структурная схема узла связи. Действие всех узлов (61, 62, 63, 64, 65, 66, 67, 67, 68 и 69) и связей (70, 71, 72, 73, 74, 75, 76) представлено выше.
Постановка на боевое дежурство подводной беспилотной ракетной системы существенно повысит паритет между наступательными вооружениями сил НАТО, которыми руководит США, размещенными в непосредственной близости у границ нашей страны, и вооруженными силами сдерживания РФ у границ заокеанских держав, которые могут стать противниками РФ.
Как сказал президент на встрече с журналистами 20 февраля 2019 г. о том, что при выходе США из договора по РСМД и усилении вооруженных сил НАТО у границ РФ, Россия вынуждена защищаться, нанося удары не только по территориям, где расположены ракетно-ядерные силы со временем подлета ракет до 15 минут, но и по территориям, где принимаются решения по нанесению ударов по РФ.
Подводная беспилотная ракетная система может иметь чрезвычайно важное значение, в части сдерживания стран агрессоров от нападения на РФ, но и, что немаловажно, существенно уменьшить затраты на вооруженные силы.
Изобретение относится к области военной технике и может быть использовано для уничтожения боевой техники и живой силы противника. Подводная беспилотная ракетная система, управляемая с командного пункта, с мобильными базовыми объектами, мобильными пусковыми установками, которые оснащены электромеханическими устройствами управления движения и вооружением, спутниковой системой навигации, ЭВМ с электронной картой театра военных действий и координатами целей, которые могут изменяться с командного пункта, дополнительно содержит несколько командных пунктов наземного и подводного базирования. Предусмотрены подводные мобильные базы, пусковые ракетные установки и узлы связи. Возможно скрытное размещение мощной боевой системы в непосредственной близости от границ противника, снижение затрат на запуск и обслуживание ракет с разделяющимися самонаводящимися и управляемыми головками. 4 ил.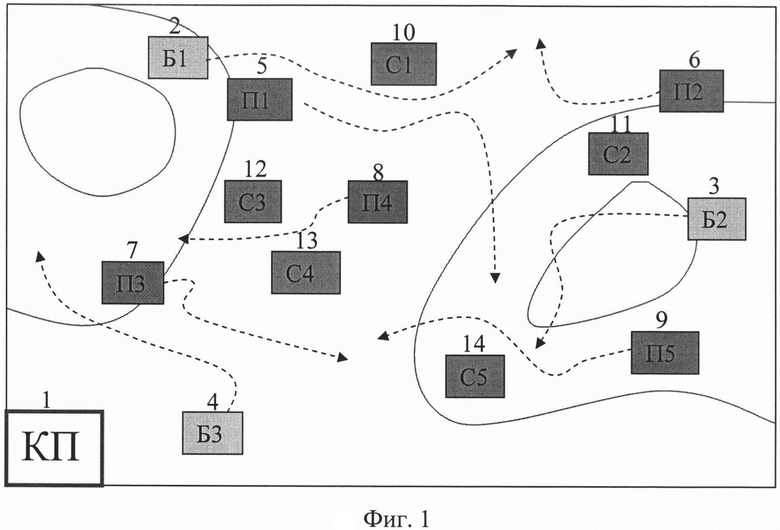
Подводная беспилотная ракетная система, управляемая с командного пункта, с мобильными базовыми объектами, мобильными пусковыми установками, которые оснащены электромеханическими устройствами управления движения и вооружением, спутниковой системой навигации, ЭВМ с электронной картой театра военных действий и координатами целей, которые могут изменяться с командного пункта, отличающаяся тем, что дополнительно имеет командные пункты наземного и подводного базирования, удаленные на расстоянии 100-10000 км от предполагаемого театра военных действий;
подводные мобильные базы с атомными энергоустановками с запасом топлива на 3-10 лет и комплектом летящих переменным курсом самонаводящихся и управляемых ракет с разделяющимися боеголовками с неядерным или ядерным зарядом;
подводные мобильные пусковые ракетные установки с электрическими ходовыми двигателями, работающие от аккумуляторов большой емкости, которые после их разрядки заменяют на заряженные аккумуляторы на мобильных базах, где пополняют и комплект ракет;
подводные мобильные узлы связи, которые периодически, посредством радиостанций и всплывающих антенн, передают и принимают информацию с командных пунктов, информацию записывают в память для дальнейшей передачи ее на базы и пусковые установки;
все мобильные устройства находятся на глубине от 10 до 200 м и непрерывно перемещаются с переменной скоростью, и курсом по программе, записанной в ЭВМ мобильных устройств, которая может быть скорректирована с командного пункта;
выполнение скорректированной программы начинается после рассылки измененных программ на все мобильные устройства со времени «Ч» для того, чтобы на каждом мобильном устройстве была информация о координатах (долгота, широта, глубина) других устройств и выполняемых ими функций для того, чтобы мобильные узлы связи осуществляли обмен информацией между подводными мобильными устройствами и командными пунктами;
все устройства, как правило, находятся на большой глубине и всплывают на «антенную» (синоним: «перископную») глубину при запуске ракет, зарядке аккумуляторных батарей, обмене сообщениями с командными пунктами, при этом на дежурстве, для связи с командными пунктами, одновременно находятся не менее двух узлов связи;
мобильные устройства выполняют следующие операции: базы осуществляют снабжение электроэнергией пусковых установок и узлов связи, хранение и снабжение боевыми ракетами пусковых установок; пусковые установки - запуск ракет, узлы связи - передачу электронных сообщений между подводными узлами и связь с командными пунктами;
базовые узлы и пусковые установки имеют радиостанции со всплывающими антеннами для связи с командными пунктами во временные интервалы, указанные в программах для ЭВМ, а также для уточнения координат их местонахождения по приборам спутниковой навигации.
| КОМПЛЕКС ОРУЖИЯ ДЛЯ ПОРАЖЕНИЯ НАЗЕМНЫХ БЕРЕГОВЫХ ОБЪЕКТОВ И СПОСОБ ЕГО ПРИМЕНЕНИЯ С ПОДВОДНЫХ НОСИТЕЛЕЙ | 2015 |
|
RU2624258C2 |
| ПРОТИВОЛОДОЧНАЯ КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2014 |
|
RU2546726C1 |
| ГРУЗОВОЙ КОНТЕЙНЕР ДЛЯ МОДУЛЯ ВООРУЖЕНИЯ И КОНТЕЙНЕРНЫЙ КОМПЛЕКС РАКЕТНОГО ОРУЖИЯ | 2011 |
|
RU2491492C1 |
| Электрическая печь с газовой защитой нагревательных элементов | 1937 |
|
SU53473A1 |
| ВЕРТИКАЛЬНАЯ ЛЕСОПИЛЬНАЯ РАМА С ЦЕПНЫМИ ПИЛАМИ | 1949 |
|
SU80222A1 |
| Мобильный пункт боевого управления | 2016 |
|
RU2629745C1 |

