Изобретение относится к области военной технике и может быть использовано для уничтожения боевой техники и живой силы противника.
Уровень техники
Известен способ стрельбы из пушки, где для придания ускорения снаряду используется пороховой заряд.
Недостатком способа является невысокая дальность полета снаряда, которая, как правило, не превышает нескольких десятков километров.
Известен способ запуска ракеты из подводного положения, где для выведения ракеты на траекторию полета требуется стартовый ускоритель и маршевый двигатель.
Недостатками способы являются необходимость использования стартового ускорителя (как правило, порохового), полет ракеты к цели происходит по кратчайшей траектории, размещение пускового устройства осуществляется на расстоянии, при котором подлетное время к цели превышает 10 мин.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом является сокращение материальных затрат на пусковое устройство с ракетой ПУР (беспилотный стартовый комплекс), сокращение подлетного времени ракеты к цели, создание условий максимально затрудняющих обнаружение местонахождения ПУР (размещение ПУР в подводном положении на глубине от 100 до 300 м, радиостанция ПУР нормально установлена на прием, передача информации с ПУР осуществляется по запросу с командного пункта КП. ПУР непрерывно перемещается по маршруту, заложенному в программе ЭВМ ПУР, коррекция программы осуществляется с КП.
Способ управления полетом боевой ракеты, отличающийся тем, что
пусковая установка с ракетой (ПУР) размещается в непосредственной близости от территории противника в месте, скрытом от устройств обнаружении противника, в подводном положении на глубине 100-300 м от поверхности океана, при этом старт боевой ракеты осуществляется при нахождении ПУР на глубине 100 м;
ПУР выполняют с основанием, выполненном в виде кольцевого стола с аппаратурой с соплами ходовых двигателей для перемещения ПУР; при выводе с помощью ходовых двигателей ПУР к месту старта, посредством электрических связей между основанием и подъемными цилиндрами, открываются запорные вентили для пропуска сжатого воздуха из резервуара сжатого воздуха в подъемные цилиндры под поршни, благодаря чему поднимаются поршни по подъемным цилиндрам; верхняя часть подъемных цилиндров над поршнями при этом постоянно сообщаются с водой океана, а при поднятии поршней вода выдавливается из верхней части подъемных цилиндров и ПУР устремляется вверх; при выходе боевой ракеты в надводное положение включается маршевый двигатель боевой ракеты и начинается ее полет по заранее рассчитанной траектории, при этом ПУР без боевой ракеты опускается в подводное положение, а воздух из подъемных цилиндров вновь закачивается в резервуар сжатого воздуха;
управление полетом ракеты осуществляется по программе, записанной в бортовую ЭВМ боевой ракеты;
если возникают отклонения фактической траектории от программной, то полет ракеты корректируется с участием спутниковой системы навигации;
программная траектория полета боевой ракеты имеет переменный курс и высоту, причем первоначально полет боевой ракеты направлен на ложную цель, при подлете к которой курс ракеты резко меняется и она летит к реальной цели;
радиостанция ПУР включается на прием в моменты времени по заранее составленному графику и дополнительно включается по приказу с командного пункта, при этом всплывающая антенна радиостанции ПУР постоянно находится в подводном положении и всплывает только при работе радиостанции, а сама радиостанция и ЭВМ ПУР размещаются на основании;
по запросу с командного пункта эта радиостанция может передать координаты местонахождения пускового устройства с ракетой и его исправное состояние с участием ЭВМ и приемника спутниковой системы навигации;
при приеме информации с командного пункта ЭВМ ПУР осуществляет выбор маршрута его перемещения, а также с участием бортовой ЭВМ боевой ракеты осуществляет выбор цели и старт боевой ракеты; передача координат на командный пункт осуществляется с запланированными искажениями, для получения фактических значений координат необходимо знать поправочные коэффициенты, которые устанавливаются заблаговременно и зависят от даты и времени суток.
Описание чертежей
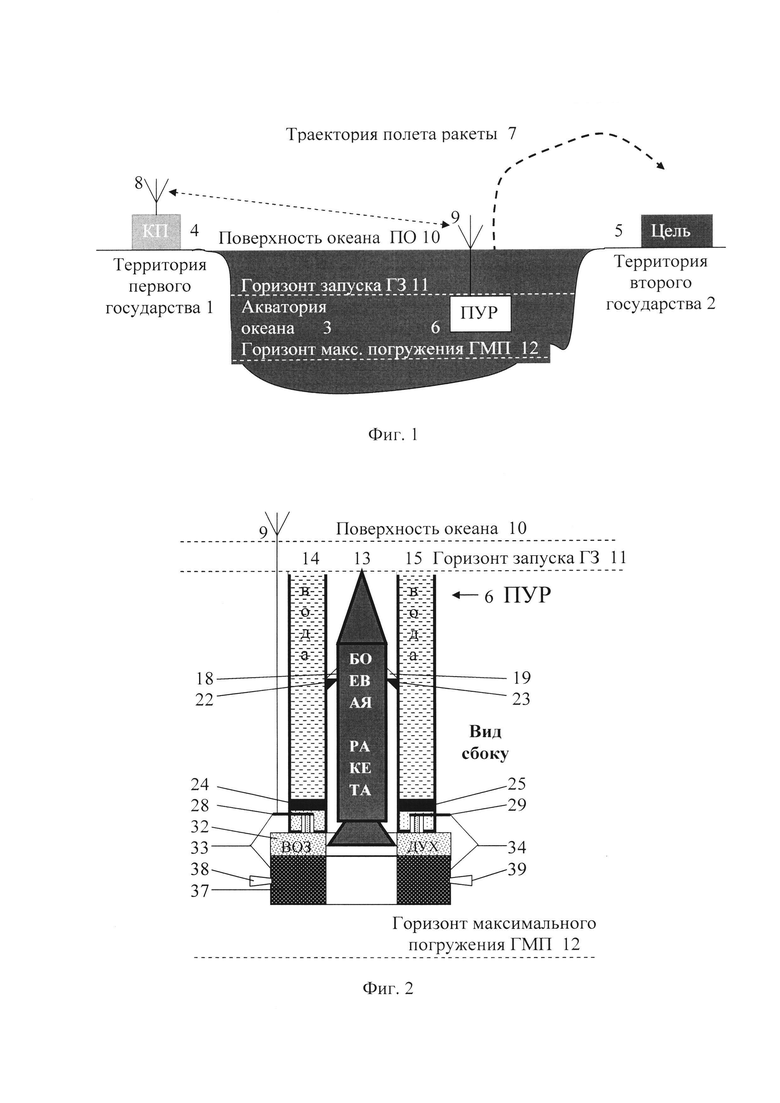
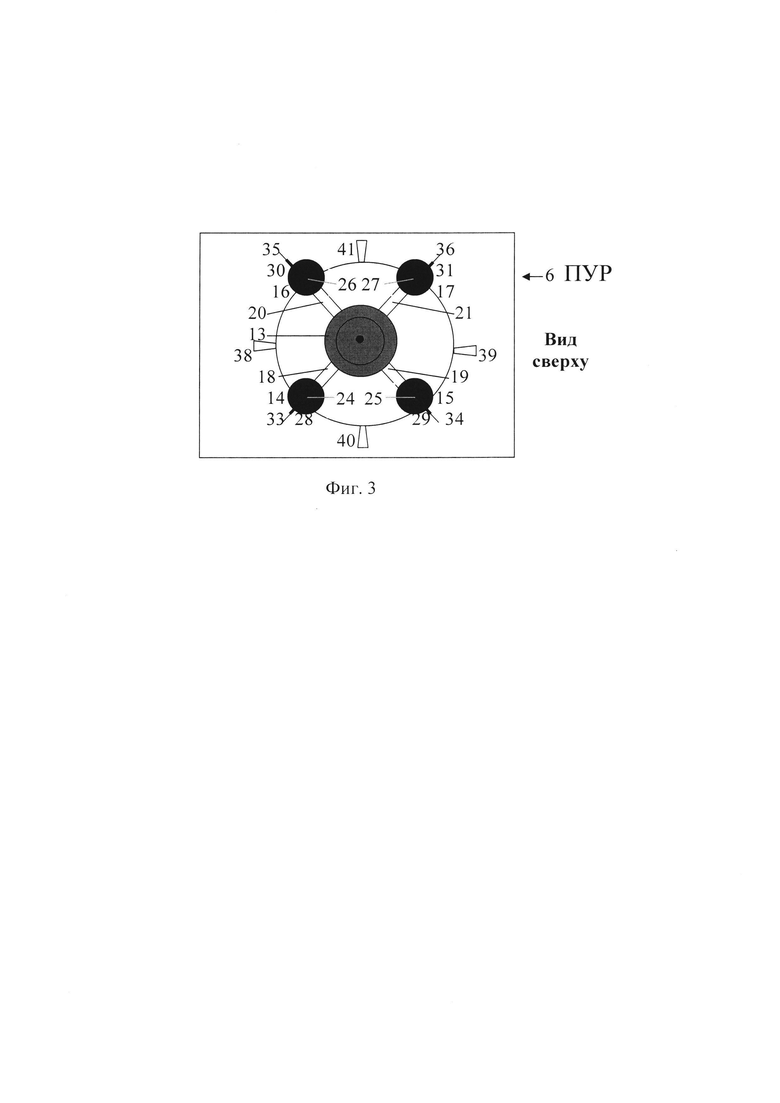
На фиг. 1 представлена структурная схема расположения объектов; на фиг. 2 - пусковая установка с ракетой, вид сбоку; фиг. 3 - пусковая установка с ракетой, вид сверху.
Условные обозначения:
1 - территория первого государства;
2 - территория второго государства;
3 - акватория океана;
4 - командный пункт КП;
5 - цель;
6 - пусковая установка с ракетой ПУР;
7 - траектория полета ракеты ТПР;
8 - антенна КП;
9 - антенна ПУР;
10 - поверхность океана ПО;
11 - горизонт запуска ГЗ;
12 - горизонт максимального погружения ГМП;
13 - боевая ракета БР;
14 - первый подъемный цилиндр 1ПЦ;
15 - второй подъемный цилиндр 2ПЦ;
16 - третий подъемный цилиндр 2ПЦ;
17 - четвертый подъемный цилиндр 4ПЦ;
18, 19, 20 и 21 - упоры на боевой ракете УР;
22 и 23 - упоры на подъемных цилиндрах УЦ;
24, 25, 26 и 27 - поршни в подъемных цилиндрах ПР;
28, 29, 30 и 31 - запорные вентили для пропуска сжатого воздуха ЗВ;
32 - резервуар для сжатого воздуха РЗ;
33, 34, 35 и 36 - электрические связи ЭС между основанием и подъемными цилиндрами;
37 - кольцевой стол КС (основание) с аппаратурой и соплами ходовых двигателей;
38, 39, 40 и 41 - сопла ходовых двигателей СХД;
Радиостанция и ЭВМ пускового устройства с ракетой размещены на кольцевом (пусковом) устройстве.
Осуществление изобретения
Для эффективного использования БР 13 ее целесообразно размещать в непосредственной близости к территории противника в месте, скрытом от устройств обнаружения противника. Для этого подходит подводное базирование ПУР 42. Для усложнения поиска ПУР 6 техническими устройствами противника, оно должно перемещаться на глубине 100-300 м от поверхности океана ПО 10. Радиостанция БУР 6 (на фиг. 1, 2 и 3 не представлена) включена на прием и может осуществлять кратковременную передачу закодированной информации по запросу КП 4 о координатах БУР 6 и ее исправном состоянии. Кроме того на БУР 6 по радиосвязи поступает информация о номере поражаемого объекта (для наведения БР 13 на цель) и времени старта ракеты. ПУР 6 имеет минимальный набор технических средств для обмена информацией с КП 4, определения координат местонахождения БУР 6 с помощью системы спутниковой навигации РФ (на фиг. 1, 2 и 3 не представлены). Радиостанция БУР 6 работает на прием в моменты времени по заранее составленному графику и может дополнительно включаться по приказу с КП 4. Всплывающая антенна 9 постоянно находится в подводном положении и всплывает только при приеме или передаче информации. Передача информации о координатах (х, у, z) места нахождения БУР 6 на КП 4 осуществляется с запланированными искажениями. Для получения фактических значений координат БУР 6 необходимо знать поправочные коэффициента, которые устанавливаются заблаговременно и каждые 2 часа принимают новые значения.
Траектории полета БР 13 из каждой зоны (область радиусом 200-1000 м) ее местонахождения до цели рассчитывается заблаговременно и имеет переменный курс и высоту. Первоначальная траектория полета боевой ракеты 7 соответствует ложной цели 5, находящейся на расстоянии 100-300 км от фактической цели. При подлете БР 13 к ложной цели ракета БР 13 резко меняет курс и также зигзагообразно продолжает полет к фактической цели (на фиг. 1, 2 и 3 не представлена). Во время полета БР 13 управляется только бортовой ЭВМ в соответствии с выбранной программой и координатами БР 13, получаемыми с помощью системы спутниковой навигации РФ. Внешние электромагнитные поля на курс ракеты не влияют.
На фиг. 1 представлена структурная схема расположения объектов. На территории первого государства 1 (РФ или дружественное государство), а также при морском базировании в подводном положении размещается командный пункт КП 4 с устройствами обмена информации и антенной 8. В непосредственной близости к территории второго государства 2 (территория противника) в подводном положении под поверхностью океана ПО 10 на глубине 100-300 м размещается пусковое устройство с ракетой ПУР 6. Старт БР 13 осуществляется при нахождении ПУР на глубине 100 м - горизонт запуска ГЗ 11. Это позволяет осуществить скоростной подъем ПУР 6 на поверхность океана ПО 10. Ракета БР 13 поднимается над поверхностью океана 10, где включается маршевый двигатель БР 13.
Горизонт максимального погружения ГМП 12 ниже уровня океана на 300 м, что позволяет защитить БУР 6 от глубинных бомб и от давления воды.
На фиг. 2 и 3 представлен вид сбоку и вид сверху пусковой установка с ракетой ПУР 6 соответственно.
По программе, заложенной в ЭВМ ПУР, а также по командам с КП 4 ПУР 6 перемещается в заданной зоне с изменение горизонта (с участием сопла ходовых двигателей СД 38-41). Перед запуском БР 13 на ПУР 6 поступает информация о номере цели и времени старта. Бортовая ЭВМ получает информацию и в заданный момент времени осуществляет запуск БР 13 на заданную цель, с учетом первоначального наведения БР 13 на ложную цель. При этом ПУР 6 подводится с помощью ходовых двигателей (сопла двигателя СД 38-41) в место, откуда будет произведен старт, поднимается на ГЗ 11 и стартует. При этом запорные вентили ЗВ 28-31 по цепям 33-36 получают приказ на выпуск воздуха из резервуара со сжатым воздухом РЗ 32, воздух пропускается в цилиндры 14-17. Поднимаются поршни 24-31 и выдавливают воду из верхних частей цилиндров 14-17. Верхняя часть цилиндров постоянно сообщается с водой океана. БУР 6 устремляется вверх. При выходе БР 13 в надводное положение включается маршевый двигатель (на фиг. 1, 2 и 3 не представлен) и БР 13 начинает полет. ПУР без ракеты опускается в подводное положение. Подъем БР 13 в подводном положении осуществляется с участием упоров на 18-21 на БР 13 и упоров 22 и 23 на БР 13 (на фиг. 2 показаны только два упора). Затем воздух из цилиндров 14-17 вновь закачивается в РЗ 32 и ПУР без ракеты опускается вниз.
Изобретение относится к способу управления полетом боевой ракеты. Технический результат заключается в сокращении материальных затрат на пусковое устройство с ракетой (ПУР), сокращении подлетного времени ракеты к цели, создании условий, максимально затрудняющих обнаружение местонахождения ПУР. В указанном способе ПУР размещается в непосредственной близости от территории противника в месте, скрытом от устройств обнаружения противника, в подводном положении на глубине 100-300 м от поверхности океана. Старт боевой ракеты осуществляется при нахождении ПУР на глубине 100 м. ПУР выполняют с основанием, выполненным в виде кольцевого стола с аппаратурой с соплами ходовых двигателей для перемещения ПУР. При выводе с помощью ходовых двигателей ПУР к месту старта посредством электрических связей между основанием и подъемными цилиндрами открываются запорные вентили для пропуска сжатого воздуха из резервуара сжатого воздуха в подъемные цилиндры под поршни, благодаря чему поднимаются поршни по подъемным цилиндрам. Верхняя часть подъемных цилиндров над поршнями при этом постоянно сообщается с водой океана, а при поднятии поршней вода выдавливается из верхней части подъемных цилиндров и ПУР устремляется вверх. При выходе боевой ракеты в надводное положение включается маршевый двигатель боевой ракеты и начинается ее полет по заранее рассчитанной траектории, ПУР без боевой ракеты опускается в подводное положение, а воздух из подъемных цилиндров вновь закачивается в резервуар сжатого воздуха. Управление полетом боевой ракеты осуществляется по программе, записанной в бортовую ЭВМ боевой ракеты. Если возникают отклонения фактической траектории от программной, то полет боевой ракеты корректируется с участием спутниковой системы навигации. Программная траектория полета боевой ракеты имеет переменный курс и высоту. Первоначально полет боевой ракеты направлен на ложную цель, при подлете к которой курс боевой ракеты резко меняется и она летит к реальной цели. Радиостанция ПУР включается на прием в моменты времени по заранее составленному графику и дополнительно включается по приказу с командного пункта. Всплывающая антенна радиостанции ПУР постоянно находится в подводном положении и всплывает только при работе радиостанции, а сама радиостанция и ЭВМ ПУР размещаются на основании. По запросу с командного пункта эта радиостанция может передать координаты местонахождения ПУР и его исправное состояние с участием ЭВМ ПУР и приемника спутниковой системы навигации. При приеме информации с командного пункта ЭВМ ПУР осуществляет выбор маршрута его перемещения, а также с участием бортовой ЭВМ боевой ракеты осуществляет выбор цели и старт боевой ракеты. Передача координат на командный пункт осуществляется с запланированными искажениями. Для получения фактических значений координат необходимо знать поправочные коэффициенты, которые устанавливаются заблаговременно и зависят от даты и времени суток. 3 ил.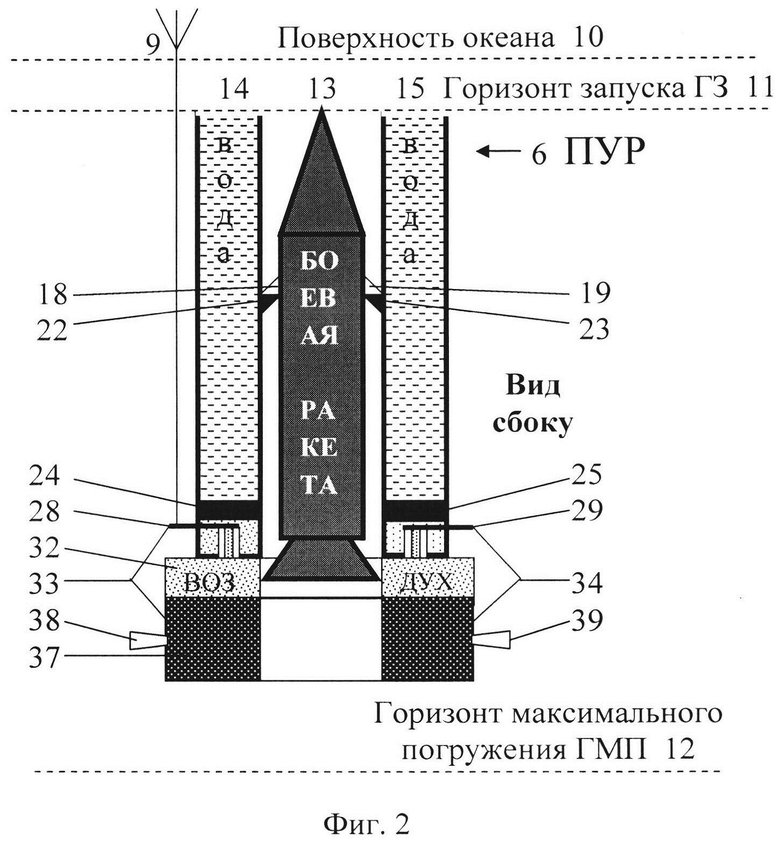
Способ управления полетом боевой ракеты, отличающийся тем, что
пусковая установка с ракетой (ПУР) размещается в непосредственной близости от территории противника в месте, скрытом от устройств обнаружения противника, в подводном положении на глубине 100-300 м от поверхности океана, при этом старт боевой ракеты осуществляется при нахождении ПУР на глубине 100 м;
ПУР выполняют с основанием, выполненным в виде кольцевого стола с аппаратурой с соплами ходовых двигателей для перемещения ПУР; при выводе с помощью ходовых двигателей ПУР к месту старта посредством электрических связей между основанием и подъемными цилиндрами открываются запорные вентили для пропуска сжатого воздуха из резервуара сжатого воздуха в подъемные цилиндры под поршни, благодаря чему поднимаются поршни по подъемным цилиндрам; верхняя часть подъемных цилиндров над поршнями при этом постоянно сообщается с водой океана, а при поднятии поршней вода выдавливается из верхней части подъемных цилиндров и ПУР устремляется вверх; при выходе боевой ракеты в надводное положение включается маршевый двигатель боевой ракеты и начинается ее полет по заранее рассчитанной траектории, при этом ПУР без боевой ракеты опускается в подводное положение, а воздух из подъемных цилиндров вновь закачивается в резервуар сжатого воздуха;
управление полетом боевой ракеты осуществляется по программе, записанной в бортовую ЭВМ боевой ракеты;
если возникают отклонения фактической траектории от программной, то полет боевой ракеты корректируется с участием спутниковой системы навигации;
программная траектория полета боевой ракеты имеет переменный курс и высоту, причем первоначально полет боевой ракеты направлен на ложную цель, при подлете к которой курс боевой ракеты резко меняется и она летит к реальной цели;
радиостанция ПУР включается на прием в моменты времени по заранее составленному графику и дополнительно включается по приказу с командного пункта, при этом всплывающая антенна радиостанции ПУР постоянно находится в подводном положении и всплывает только при работе радиостанции, а сама радиостанция и ЭВМ ПУР размещаются на основании;
по запросу с командного пункта эта радиостанция может передать координаты местонахождения ПУР и его исправное состояние с участием ЭВМ ПУР и приемника спутниковой системы навигации;
при приеме информации с командного пункта ЭВМ ПУР осуществляет выбор маршрута его перемещения, а также с участием бортовой ЭВМ боевой ракеты осуществляет выбор цели и старт боевой ракеты;
передача координат на командный пункт осуществляется с запланированными искажениями, для получения фактических значений координат необходимо знать поправочные коэффициенты, которые устанавливаются заблаговременно и зависят от даты и времени суток.
| КОМПЛЕКС ОРУЖИЯ ДЛЯ ПОРАЖЕНИЯ НАЗЕМНЫХ БЕРЕГОВЫХ ОБЪЕКТОВ И СПОСОБ ЕГО ПРИМЕНЕНИЯ С ПОДВОДНЫХ НОСИТЕЛЕЙ | 2015 |
|
RU2624258C2 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| САРКИСОВ А.А | |||
| и др | |||
| Роль Российской науки в создании отечественного подводного флота, Москва, Наука, 2008, всего 654 с., с | |||
| Способ включения усилителя в трансляцию | 1923 |
|
SU403A1 |
| РЯБКО Б.Я | |||
| и др | |||
| Криптографические методы защиты информации: учебное пособие, Москва, Горячая линия - Телеком, 2005, всего 229 с., с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Ракетный комплекс "Томахок" | |||

