Область техники, к которой относится изобретение
Изобретение относится к области военной технике и может быть использовано для поражения летящего переменным курсом и высотой объекта беспилотным летательным аппаратом.
Уровень техники
Известен способ поражения летящего объекта с участием: противоракеты, которая запускается с мобильной пусковой установки на базе шасси транспортной машины МАЗ-537 со специальным прицепом, снабженной радиолокационной станцией, которая отслеживает запуск объекта, рассчитывает предполагаемую траекторию его полета, отслеживает фактическую траекторию полета, осуществляет ввод полетного задания в головку противоракеты, коррекцию траектории ее полета, непрерывный подсвет цели; устройства наведения, которое наводит противоракету на цель со стартового положения, корректирует ее полет; командного пункта, с помощью которого осуществляется запуск противоракеты, а при необходимости и ее уничтожение.
Противоракета состоит из следующих основных элементов: боевая часть, бортовая аппаратура наведения, автопилот с комплектом рулевых машин, двигателей первой и второй ступени. Бортовая радиоаппаратура управления предназначается для приема команд управления полетом противоракеты и выдачи их на автопилот, а также для приема разовых команд, управляющих тягой маршевого двигателя и подрывом боевой части; автопилот предназначается для управления рулевыми машинами противоракеты, поворотными двигателями и воздушными рулями и для стабилизации противоракеты относительно трех взаимно перпендикулярных осей, а также для перехода на самонаведение за 10 с до подлета к цели [http://vko.ru, http://militaryrussia.ru].
Недостатком способа является то, что он не предназначен для поражения быстролетящих переменным курсом и высотой объектов.
Известна беспилотная боевая машина и система дистанционного управления движением и вооружением беспилотной боевой машины, состоящая из системы ГЛОНАСС, беспилотного летательного аппарата, беспилотной боевой машины, которая дополнительно имеет командный пункт, капсулу, электронные и электромеханические устройства, управляющие и контрольные устройства регулирования движения и управления вооружением, размещенные в командном пункте, содержащем пульт управления и контроля, ЭВМ центрального поста, радиостанцию для связи командного пункта с капсулой, беспилотным летательным аппаратом, радиотелефон для связи командного пункта с капсулой;
капсула содержит пульт управления и контроля, радиостанцию для связи с командным пунктом, беспилотной боевой машиной и беспилотным летательным аппаратом, приемник ГЛОНАСС;
беспилотная боевая машина содержит радиостанцию для связи ЭВМ с командным пунктом, беспилотным летательным аппаратом, капсулой, приемник для приема сигналов ГЛОНАСС, ЭВМ для и контроля за устройствами, которые воздействуют на двигатель и электромоторы, рулевое управление, вооружение, земляные фрезы;
беспилотный летательный аппарат содержит радиостанцию для связи с командным пунктом, капсулой и беспилотной боевой машиной, контроллер для управления и контроля двигателями и фотокамерой [Патент RU, №2671138, Беспилотная боевая машина и система дистанционного управления движением и вооружением беспилотной боевой машиной. Опубликовано: 29.10.2018. Бюл. №31, автор Полевой Ю.И.].
Недостатком технического решения то, что его невозможно использовать для поражения летящих объектов.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом является поражение летящего переменным курсом и высотой объекта.
Способ поражения летящего переменным курсом и высотой объекта, скорость которого составляет 6-7 км/с, беспилотным летательным аппаратом БЛА с участием внешней системы наведения, в котором предусмотрена ЭВМ, радиостанция для связи с БЛА, отличающийся тем, что дополнительно предусмотрена:
пусковая установка ПУ для запуска БЛА, скорость полета которого превышает скорость полета объекта;
БЛА, оборудованный: ГЛОНАСС; радиостанцией для связи с внешней системой наведения; бортовой ЭВМ, которая получает информацию с ГЛОНАСС о местоположении БЛА и с внешней системой наведения - о траектории полета объекта, и которая управляет бортовой аппаратурой наведения, корректирует дальнейший полет БЛА, а также управляет пушкой для поражения объекта;
внешняя система наведения, которая наводит БЛА на объект, и которая содержит: радиолокационную станцию дальнего обнаружения РЛСдо запуска объекта и отслеживания траектории его полета, а также фактическую траекторию полета БЛА; ЭВМ, предназначенную для расчета траектории полета БЛА; радиостанцию для передачи информации на БЛА для наведения его на объект;
система возвращения БЛА к месту дислокации.
Краткое описание чертежа
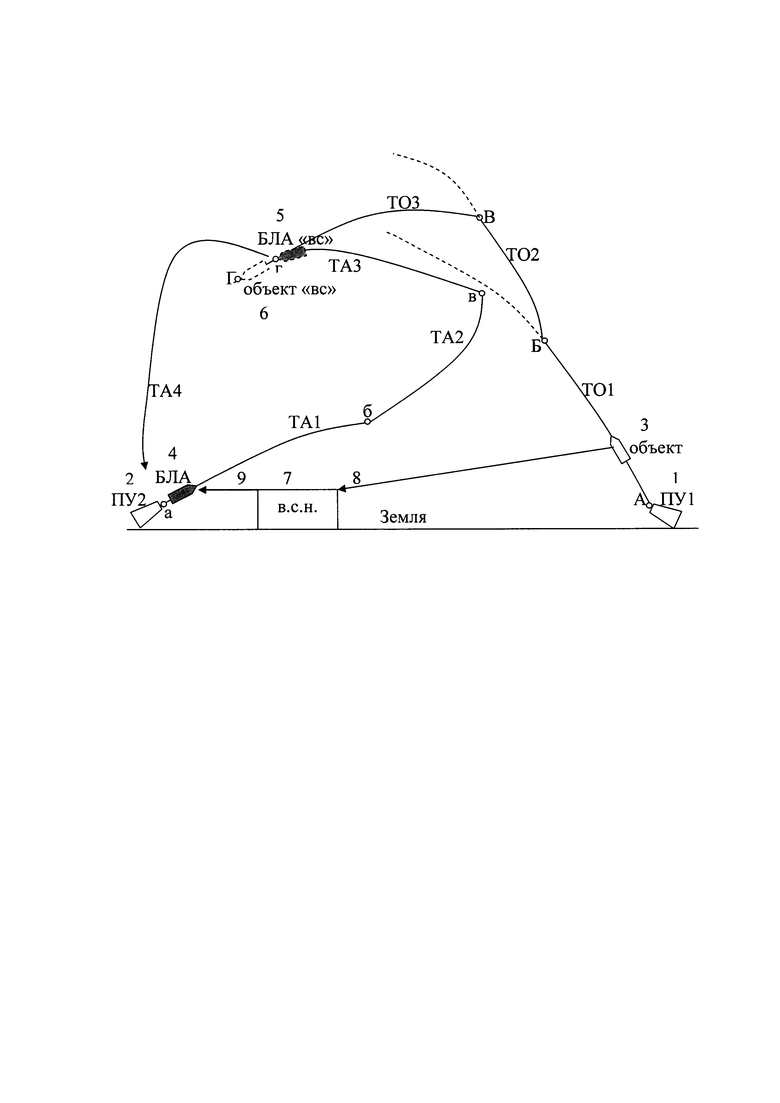
На чертеже представлены траектории полетов быстролетящего объекта и беспилотного летательного аппарата, пусковые установки и станция внешней системы наведения.
Осуществление изобретения
На чертеже приведены следующие условные обозначения:
1 и 2 - пусковые установки ПУ1 и ПУ2;
3 - объект, скоростью которого составляет 6-7 км/с;
4 - беспилотный летательный аппарат БЛА со скоростью полета 7-8 км/с, который снабжен: ГЛОНАСС, радиоприемником для приема информации от внешней системы наведения, органами управления полетом (курсом и высотой), двигателями и рулями управления, которыми осуществляется управление полетом с помощью бортовой ЭВМ, пушкой для поражения объекта;
5 и 6 - БЛА и объект в момент выстрела («вс» на чертеже) из пушки БЛА по объекту;
7 - внешняя система наведения (в. с. н.) (наведения БЛА на объект), которая содержит: радиолокационную станцию дальнего обнаружения РЛСдо для отслеживания момента и координаты запуска объекта, непрерывного отслеживания местонахождения объекта и БЛА, электронной вычислительной машины ЭВМ для расчета траектории полета БЛА, радиостанции для передачи информации на БЛА о траектории его полета (а именно, трехмерная координата впередилежащей точки, куда наводится БЛА) и команды на поражение объекта (выстрел из пушки БЛА);
8 - направление передачи информации о координате объекта на внешнюю систему наведения;
9 - направление передачи информации о траектории объекта на БЛА;
А, Б, В и Г - точки изменения траектории полета объекта;
а, б, в и г - точки изменения траектории полета БЛА;
TO1, TO2, TO3 и TO4 - траектории полета объекта (сплошные линии обозначают исполненные траектории полета, пунктирные - первоначально заданные траектории полета);
ТА1, ТА2 и ТА3 - траектории полета БЛА.
На чертеже для упрощения описания действия способа приведены изображения траекторий полетов объекта и БЛА в плоскости вместо пространственных изображений.
В момент запуска объекта 3 из ПУ1 1 (точка А) фиксируется пуск объекта 3, траектория полета которого определяется несколько позже по информации передаваемой по направлению стрелки 8 внешней системой наведения 7. Информация о траектории полета передается по направлению стрелки 9 на БЛА 4. Аналогичная информация поступает непрерывно во время всего полета объекта 3. ЭВМ в внешней системе наведения непрерывно пересчитывает траекторию полета объекта 3 (TO1, TO2, ТО3), передает ее с помощью радиостанции внешней системы наведения 7 на БЛА 4, где с помощью бортовой ЭВМ и органов управления (двигателями и рулями управления) осуществляется коррекция траектории (ТА1, ТА2, ТА3 и ТА4; ТА4 траектория возвращения БЛА к месту дислокации) полета (курсом и высотой), а также управление пушкой для осуществления выстрела на поражение объекта. Точки изменения курса объекта 3 обозначены буквами Б, В и Г; точки изменения курса БЛА 4 обозначены буквами б, в и г; точки А и а являются точками начала траекторий соответственно объекта 3 и БЛА 4. БЛА 5 и объект 6 (см. чертеж) соответствуют их местам расположению в момент выстрела пушки БЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотная боевая машина и система дистанционного управления движением и вооружением беспилотной боевой машиной | 2017 |
|
RU2671138C1 |
| Способ автоматического наведения орудия на цель | 2019 |
|
RU2728292C1 |
| СПОСОБ ПОРАЖЕНИЯ ЛЕТЯЩЕГО ОБЪЕКТА | 2020 |
|
RU2741132C1 |
| СПОСОБ НАВЕДЕНИЯ НА ЦЕЛЬ РЕАКТИВНОЙ СИСТЕМЫ | 2020 |
|
RU2753940C1 |
| СПОСОБ НАВЕДЕНИЯ ОРУДИЯ НА ЦЕЛЬ | 2020 |
|
RU2743597C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РЕАКТИВНЫХ СНАРЯДОВ | 2020 |
|
RU2747681C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНЫХ ЦЕЛЕЙ | 2020 |
|
RU2746235C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЗАРЯДНОЙ ВИНТОВКОЙ | 2019 |
|
RU2723700C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БОЕВОЙ РАКЕТЫ | 2019 |
|
RU2748503C2 |
| ПОДВОДНАЯ БЕСПИЛОТНАЯ РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2710039C1 |
Изобретение относится к военной технике. Способ поражения летящего переменным курсом и высотой объекта, скорость которого составляет 6-7 км/с, заключается в том, что поражают летящий объект беспилотным летательным аппаратом (БЛА) с участием внешней системы наведения, в котором предусмотрена ЭВМ, радиостанция для связи с БЛА. При этом дополнительно предусмотрена пусковая установка для запуска БЛА, БЛА, внешняя система наведения и система возвращения БЛА к месту дислокации. БЛА оборудован ГЛОНАСС, радиостанцией для связи с внешней системой наведения и бортовой ЭВМ. С помощью ЭВМ получают информацию от ГЛОНАСС о местоположении БЛА, от внешней системы наведения о траектории полета объекта, управляют бортовой аппаратурой наведения, корректируют дальнейший полет БЛА и управляют пушкой для поражения объекта. Внешняя система наведения содержит радиолокационную станцию дальнего обнаружения (РЛС), ЭВМ, предназначенную для расчета траектории полета БЛА, и радиостанцию для передачи информации на БЛА. Достигается эффективное поражение летящего объекта. 1 ил.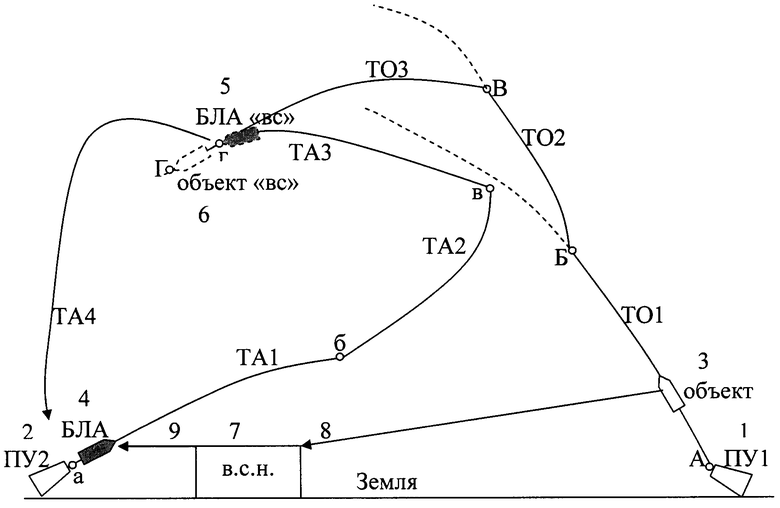
Способ поражения летящего переменным курсом и высотой объекта, скорость которого составляет 6-7 км/с, беспилотным летательным аппаратом (БЛА) с участием внешней системы наведения, в котором предусмотрена ЭВМ, радиостанция для связи с БЛА, отличающийся тем, что дополнительно предусмотрена:
- пусковая установка (ПУ) для запуска БЛА, скорость полета которого превышает скорость полета объекта;
- БЛА, оборудованный: ГЛОНАСС; радиостанцией для связи с внешней системой наведения; бортовой ЭВМ, которая получает информацию от ГЛОНАСС о местоположении БЛА и от внешней системы наведения о траектории полета объекта и которая управляет бортовой аппаратурой наведения, корректирует дальнейший полет БЛА, а также управляет пушкой для поражения объекта;
- внешняя система наведения, которая наводит БЛА на объект и которая содержит: радиолокационную станцию дальнего обнаружения РЛС до запуска объекта и отслеживания траектории его полета, а также фактическую траекторию полета БЛА, ЭВМ, предназначенную для расчета траектории полета БЛА, радиостанцию для передачи информации на БЛА для наведения его на объект;
- система возвращения БЛА к месту дислокации.
| Способ очистки медного купороса от примеси железа | 1961 |
|
SU149412A1 |
| БЕСПИЛОТНЫЙ УДАРНЫЙ КОМПЛЕКС | 2014 |
|
RU2558528C1 |
| US 10399674 B2, 03.09.2019 | |||
| US 9846016 B2, 19.12.2017. | |||

