Заявленная группа изобретений относится к системам навигации и может быть использована при сближении, стыковке, швартовке (причаливании), посадке, контроле взаимного расположения и/или перемещения объектов, например: самолетов на эшелонах, заходах на посадку; космических аппаратов на орбитах при маневрировании, стыковке; кораблей в портах, каналах, на рейдах; роботизированных комплексов (беспилотных летательных (подводных) аппаратов, беспилотных транспортных средств) в «стае» и/или в потоке, на трассе и/или траектории при взаимном маневрировании, причаливании (швартовке), стыковке и т.п., в том числе, в автоматическом режиме, в том числе, когда все взаимодействующие объекты - мобильные объекты.
Известен способ определения взаимного положения при межсамолетной навигации между N летательными аппаратами [1], заключающийся в:
- определение навигационной информации каждым из N летательных аппаратов с использованием спутниковых навигационных систем;
- получение одним из летательных аппаратов навигационной информации от N-1 взаимодействующего летательного аппарата по каналам связи;
- определение удаления N-1 взаимодействующего летательного аппарата по отношению к данному летательному аппарату с использованием радиолокационных средств самолета;
- совместной обработке информации с целью уточнения относительного положения летательных аппаратов.
К недостаткам указанного способа относятся:
- сложности обеспечения синхронизации при взаимодействии N летательных аппаратов;
- сложности обеспечения электромагнитной совместимости работающих РЛС летательных аппаратов;
- определение только положения центра масс N летательных аппаратов относительно друг друга и невозможность определения взаимного рассогласования по углам крена, тангажа и рыскания N летательных аппаратов относительно друг друга.
Известен способ [2], выбранный в качестве наиболее близкого аналога, заключающийся в:
- размещении четырех или более передатчиков сигналов определения положения на и/или около площадки первого объекта;
- размещении трех или более приемников сигналов определения положения на втором, приближающемся объекте;
- определении расстояния для каждого полученного сигнала определения положения между передатчиком и приемником;
- оценке относительного положения и относительной ориентации каркаса корпуса второго объекта к первому посредством обработки измерений расстояний с помощью алгоритма оценки пространства состояний, реализующего модель системы первого и второго объекта.
Оценка относительного положения и относительной ориентации каркаса второго объекта по отношению к первому может быть сделана с помощью, например, фильтра Калмана, фильтра точки сигма или других фильтров в формулировке полного пространства состояния или в формулировке пространства состояния ошибки, в ходе которой выполняются следующие итеративные действия:
- предположение относительного положения и относительной ориентации второго объекта по отношению к первому из измерений;
- оценка ошибок в предполагаемом относительном положении и относительной ориентации второго объекта по отношению к первому;
- коррекция предполагаемых относительного положения и относительной ориентации второго объекта по отношению к первому на основе оцененных ошибок.
Описанный способ позволяет определить относительное положение и относительную ориентацию каркаса второго объекта по отношению к первому.
Недостатками данного способа являются:
- избыточность передатчиков сигналов определения положения располагаемых на и/или около площадки первого объекта;
- повышенный уровень электромагнитных излучений - 12 измерительных каналов;
- сложности обеспечения электромагнитной совместимости (ЭМС) работающих РЛС;
- относительно низкое быстродействие, за счет итерационного характера уточнения относительного положения и относительной ориентации второго объекта по отношению к первому.
Техническим результатом группы изобретения, помимо определения взаимного положения объектов навигации, является:
- снижение числа передатчиков, используемых для определения относительного положения и относительной ориентации активной мобильной платформы относительно пассивной мобильной платформы;
- уменьшение уровня электромагнитных излучений;
- улучшение условий ЭМС;
- повышение быстродействия.
Заявленный технический результат достигается посредством создания способа определения взаимного положения объекта навигации по отношению к другому объекту, включающего размещение на одном (первом) объекте трех передатчиков, излучатели которых размещаются на или/и вблизи первого объекта в точках с известными в системе координат первого объекта координатами так, чтобы излучатели образовывали треугольник, размещение на втором объекте (объекте навигации) четырех приемников, приемные антенны которых (далее - датчики) размещаются на или/и вблизи второго объекта в точках с известными в системе координат второго объекта координатами таким образом, чтобы датчики образовывали тетраэдр, излучение излучателями радиосигналов, содержащих данные о уникальном номере излучателя, его координатах и позволяющих производить их совместный прием и обработку на приемной стороне, которые принимают датчики радиосигналов, выделение и вычисление координат излучателей первого объекта (xi⋅yi⋅zi), i=1, 2, 3 в системе координат второго объекта модулем вычисления координат, построение плоскости по трем точкам размещения излучателей в системе координат второго объекта, построение опорной системы координат модулем построения опорной системы координат таким образом, что вектор перпендикулярный к плоскости треугольника образованного излучателями и принадлежащего плоскости определенной по трем точкам размещения излучателей, имел положительную координату Z в системе координат первого объекта и совпадал с одной из осей, например с осью OZ, опорной системы координат, а сама опорная система координат являлась правой, при этом, начало опорной системы координат совпадало с одной из вершин треугольника, а одна из его сторон, примыкающая к указанной вершине, совпадала с другой осью, например с осью ОХ, опорной системы координат, определение модулем вычисления угловых рассогласований рассогласований по углам крена/вращения/нутации, тангажа/дифферента/собственного вращения, рыскания/курсового угла/угла поворота/прецессии опорной системы координат к системе координат первого и второго объекта, а также приведенных угловых рассогласований системы координат второго объекта к системе координат первого объекта, определение модулем вычисления векторов параллельного переноса координат вектора параллельного переноса начала опорной системы координат в начало системы координат первого объекта, координат вектора параллельного переноса начала системы координат второго объекта в начало опорной системы координат, а также приведенных координат вектора параллельного переноса начала системы координат второго объекта в начало системы координат первого объекта, передачу приведенных значений углов рассогласований и вектора параллельного переноса в системы принятия решений или/и на устройства отображения или/и документирования в удобном для потребителя формате.
В частном случае выполнения способа размещение трех излучателей радиосигнала на или/и вблизи первого объекта осуществляется таким образом, что одна пара излучателей, располагается параллельно одной оси системы координат первого объекта, например, ОХ, или непосредственно на ней, вторая пара - в произвольном направлении или в плоскости параллельной плоскости XOY или в плоскости XOY системы координат первого объекта, соответственно, под углом от 0 до 180 град, к первой паре излучателей, а общая точка пары векторов имела произвольные значения (X, Y, Z) или (X, 0, Z) или (0, 0, Z) или (0, 0, 0), соответственно, в системе координат первого объекта.
В частном случае выполнения способа излучатели образуют прямоугольный треугольник, при этом, в качестве начала опорной системы координат выбирается вершина треугольника при прямом угле, а две оси опорной системы координат размещают параллельно сторонами треугольника, образующими прямой угол, правило построения правой опорной системы координат сохраняется, а координата вершины при прямом угле треугольника может иметь произвольные значения (X, Y, Z) или (X, 0, Z) или (0, 0, Z) или (0, 0, 0) в системе координат первого объекта.
В частном случае выполнения способа одна, две или три плоскости тетраэдра могут совпадать с одной, двумя или тремя плоскостями системы координат второго объекта, а местоположение одного из датчиков может совпадать с началом системы координат второго объекта и/или один из оставшихся трех датчиков и/или любая пара и/или все три датчики, в любой комбинации, совпадают с любой осью или/и комбинацией осей системы координат второго объекта.
В частном случае выполнения способа для уточнения рассогласований, в качестве дополнительных данных, могут использоваться данные, поступающие от других устройств второго объекта, например, дальномеров, высотомеров, глубиномеров, бортовых инерциальных навигационных систем, спутниковых навигационных систем.
В частном случае выполнения способа излучаемый сигнал по своей структуре может соответствовать структуре сигнала спутниковых навигационных систем.
Заявленный технический результат также обеспечивается созданием системы для определения взаимного положения объекта навигации по отношению к другому объекту, содержащей три передатчика с кодирующими устройствами, излучатели которых размещаются на или/и вблизи первого объекта в точках с известными в системе координат первого объекта координатами так, чтобы излучатели образовывали треугольник, четыре приемника, приемные антенны которых (далее - датчики) размещаются на или/и вблизи второго объекта (объекта навигации) в точках с известными в системе координат второго объекта координатами таким образом, чтобы датчики образовывали тетраэдр и каждый датчик был связан по линиям связи с вычислителем, включающем в свой состав программно-аппаратные модули вычисления координат излучателей, выделения координат источников излучения в системе координат первого объекта, построения опорной системы координат, вычисления угловых рассогласований, вычисления вектора параллельных переносов и обеспечивающей определение координат излучателей в системе координат второго объекта, выделение данных о координатах излучателей, с последующим построением опорной системы координат первого объекта, связанной с системами координат первого и второго объектов, а также определение взаимных рассогласований по углам крена/вращения/нутации, тангажа/дифферента/собственного вращения, рыскания/курсового угла/угла поворота/прецессии системы координат второго объекта к системе координат первого объекта и координат вектора параллельного переноса начала системы координат второго объекта в начало системы координат первого объекта, без измерения расстояний между каждой парой излучатель - датчик, с последующей выдачей данных в системы принятия решений или/и на устройства отображения или/и документирования в удобном для потребителя формате.
В частном случае выполнения системы в качестве излучателей и датчиков излучений используются приборы, генерирующие/реагирующие на радиоизлучение любого из диапазонов длин волн инфракрасного, видимого, ультрафиолетового, рентгеновского и гама-излучения или акустические излучения.
В частном случае выполнения системы при возникновении углов закрытия излучателей/датчиков по отношению к датчикам/излучателям на первом/втором объекте могут размещаться дополнительные излучатели/датчики.
В частном случае выполнения системы первый объект может быть неподвижен, а часть или все излучатели могут находиться на неподвижном основании, например, на земной поверхности, на дне водоемов, на возвышенностях или/и в углублениях естественного или/и искусственного происхождения.
В частном случае выполнения первого объекта, данные о координатах излучателей, векторе параллельного переноса, а также углах рассогласования опорной системы координат и системы координат первого объекта, могут храниться в памяти вычислителя, что приводит к существенному снижению потребностей в вычислительных мощностях вычислителя и повышению быстродействия.
Заявленная группа изобретений проиллюстрирована следующими рисунками:
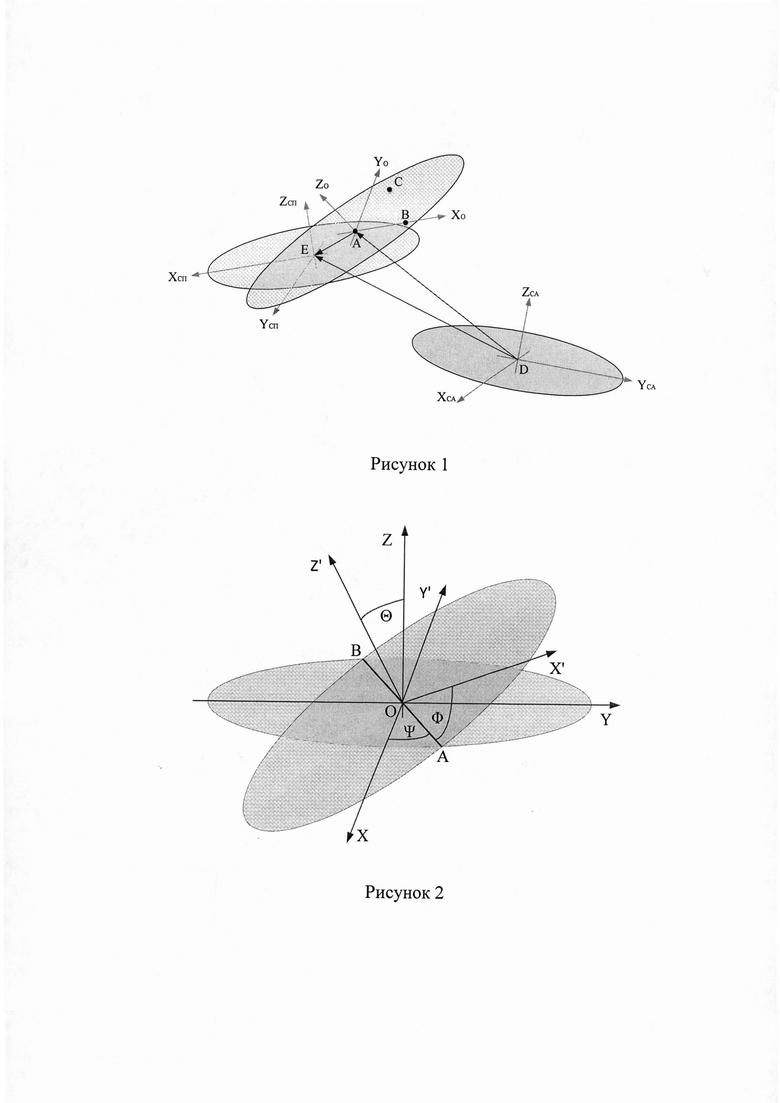
Рисунок 1 - Иллюстрация порядка определения векторов параллельного переноса.
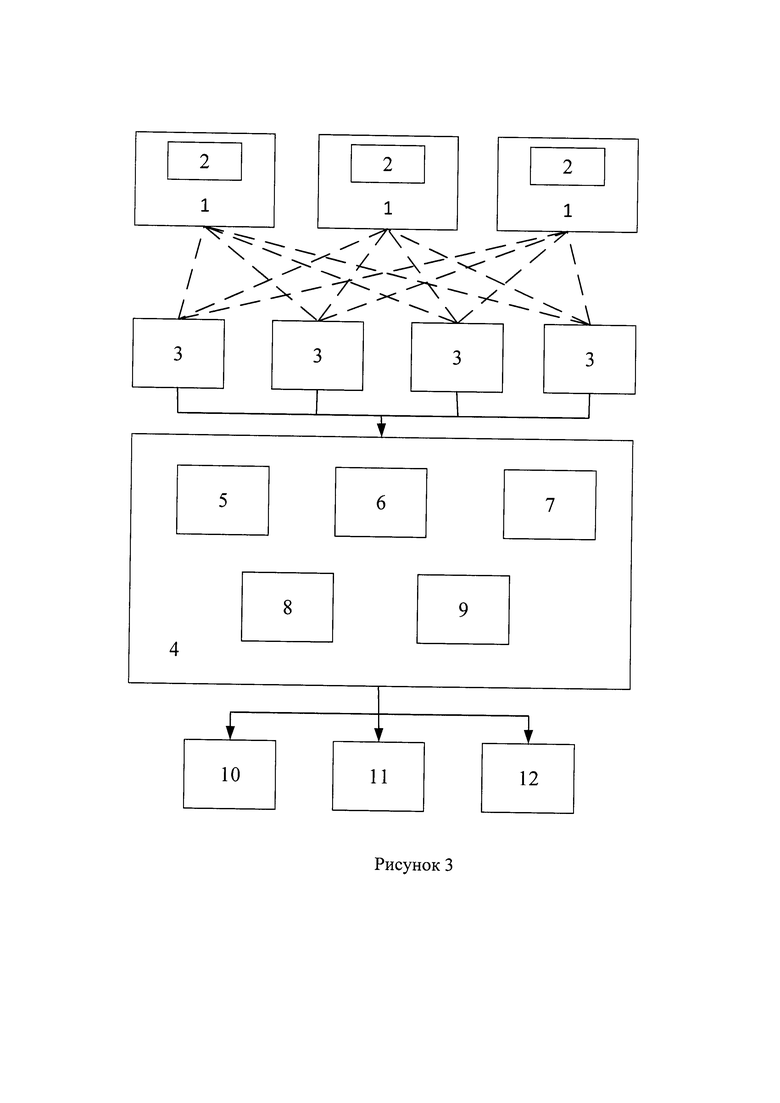
Рисунок 2 - Эйлеровы углы.
Рисунок 3 - Функциональная схема системы определения взаимного положения объектов навигации.
На рисунке 1:
XСПYСПZСП - система координат первого объекта;
XСАYСАZСА - система координат второго объекта;
XoYoZo - опорная система координат;
А, В, С - точки размещения излучателей;
A, D, Е - точки начала систем координат опорной, связанных второго объекта и первого объекта соответственно;
АЕ - вектор параллельного переноса опорной системы координат в систему координат первого объекта;
DA - вектор параллельного переноса системы координат второго объекта в опорную систему координат
DE - результирующий вектор параллельного переноса системы координат второго объекта в систему координат первого объекта.
На рисунке 2:
XYZ - первоначальная система координат;
X'Y'Z' - конечная система координат;
Угол АОХ (ψ) - угол прецессии;
Угол ZOZ' (Θ) - угол нутации;
угол АОХ' (φ) - угол собственного вращения;
линия АВ - линия узлов.
Матрица вращения из начальной в конечную систему координат
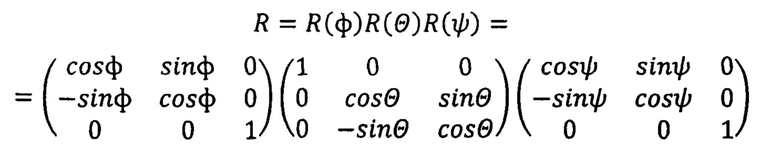
Для определения координат точки при переходе из одной системы координат в другую необходимо решить матричное уравнение
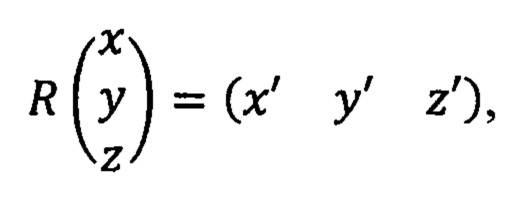
где: (х у z) - координаты точки в начальной системе координат;
(х' у' z') - координаты точки в конечной системе координат.
На рисунке 3 пунктиром показаны радиоканалы передачи данных, сплошной линией - линии связи, а позиции обозначают следующее:
1 - передатчик с излучателем;
2 - кодирующее устройство;
3 - приемник с датчиком;
4 -вычислитель;
5 - модуль вычисления координат;
6 - модуль выделения координат излучателей в системе координат первого объекта и данных о номере излучателя из принимаемых сообщений;
7 - модуль построения опорной системы координат;
8 - модуль вычисления угловых рассогласований;
9 - модуль вычисления векторов параллельного переноса;
10 - устройство системы принятия решений;
11 - устройство отображения;
12 - устройство документирования.
Осуществление предлагаемого способа.
Способ определения взаимного положения второго объекта (объекта навигации) относительно первого объекта основан на:
а) размещении трех передатчиков с кодирующими устройствами, таким образом, чтобы их излучатели располагались в вершинах треугольника с известными в системе координат первого объекта координатами вне зависимости от места размещения излучателей на или/и вблизи первого объекта;
б) одновременной передаче излучателями данных о своем номере и координатах в формате, позволяющем на приемной стороне обеспечить прием, разделение и совместную обработку принятых сигналов;
в) размещении четырех приемников таким образом, чтобы их датчики с известными в системе координат второго объекта координатами являлись вершинами тетраэдра вне зависимости от места размещения датчиков на или/и вблизи второго объекта;
г) приеме излученных сигналов четырьмя датчиками, преобразовании его к виду, удобному для обработки вычислителем и передаче по линиям связи в вычислитель;
д) выделении вычислителем из информационных сообщений данных о номерах излучателей и их координатах, сохранении их в памяти вычислителя и/или в долговременных запоминающих устройствах (далее по тексту в памяти);
е) параллельном с операциями по перечислению д) вычислении координат излучателей в системе координат второго объекта любым доступным способом [3, 4, 5] и сохранении их в памяти;
ж) определении уравнения плоскости, содержащей три излучателя в системе координат второго объекта
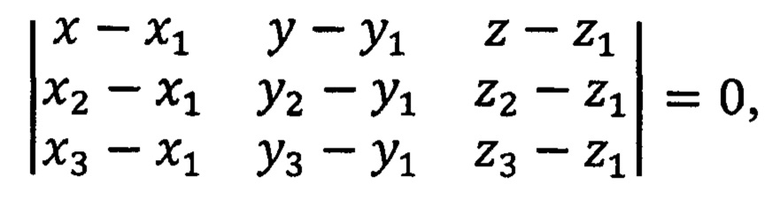
где: (xi⋅yi⋅zi), i=1, 2, 3 - координаты излучателей первого объекта в системе координат второго объекта.
Далее, переходят к уравнению плоскости вида
Ax+By+Cz+D=0;
з) анализе данных о координатах излучателей в системе координат первого объекта и определении знака при координате С вектора (А, В, С), перпендикулярного к плоскости по перечисленью ж);
и) построении опорной системы координат, таки образом, что бы вектор по перечислению з) был перпендикулярен, например, плоскости XOY, опорной системы координат и совпадал с одной из осей, например, с осью OZ, опорной системы координат, одна из вершин треугольника совпадала с началом опорной системы координат, а одна из сторон при этой вершине, совпадала с одной из осей, например, ОХ, опорной системы координат, ось OY достраивают так, чтобы опорная система координат была правой;
к) определении вектора параллельного переноса опорной системы координат относительно системы координат первого объекта как координаты центра опорной системы координат в системе координат первого объекта с заменой знака каждой координаты;
л) определении вектора параллельного переноса системы координат второго объекта относительно опорной системы координат как координату центра опорной системы координат в системе координат второго объекта;
м) определении результирующего вектора параллельного переноса системы координат второго объекта в систему координат первого объекта как сумму векторов по перечислениям к), л);
н) вычислении дальности от второго объекта до первого объекта, как модуля результирующего вектора параллельного переноса и, зная координаты результирующего вектора параллельного переноса, определения направляющих косинусов по следующим формулам:
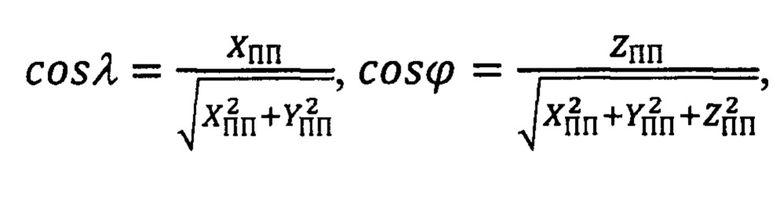
где: Хпп, Yпп и Zпп - координаты результирующего вектора параллельного переноса;
о) определении рассогласований по углам крена/вращения/нутации, тангажа/дифферента/собственного вращения, рыскания/курсового утла/угла поворота/прецессии опорной системы координат с системами координат второго и первого объекта с использованием, например, известного алгоритма [6] при этом:
- приводят начало системы координат второго объекта к системе координат первого объекта путем вычитания результирующего вектора параллельного переноса из координат единичных векторов, сонаправленных с осями координат второго объекта;
- определяют линии узлов, как пересечение плоскостей XOY системы координат первого объекта и приведенной системы координат второго объекта;
- вычисляют направляющие cos и соответствующие им sin углов поворота вокруг продольной, поперечной и вертикальной осей по правилам аналитической геометрии с учетом направления вращения;
- строят матрицы переходов;
- по правилам матричных вычислений определяют результирующие угловые рассогласования второго объекта относительно первого объекта;
п) формировании и выдаче значений результирующих углов рассогласования и результирующего вектора параллельного переноса в систему принятия решений или/и на устройства отображения или/и документирования в удобном для потребителя формате.
В перечислении о) рассмотрен один из возможных способов определения рассогласований по углам. Для определения указанных рассогласований может применяться любой другой способ вычисления угловых рассогласований.
Система для определения взаимного положения объектов навигации содержит три передатчика радиосигнала с кодирующими устройствами, излучатели которых размещаются в точках с известными координатами на или/и вблизи первого объекта, таким образом, чтобы излучатели образовывали треугольник, четыре фиксированных приемника радиоизлучения, датчики которых размещаются на или/и вблизи второго объекта, таким образом, чтобы датчики образовывали тетраэдр, а каждый датчик связан по линиям связи с вычислителем, включающем в свой состав программно-аппаратные модули:
- вычисления координат излучателей;
- выделения координат источников излучения в системе координат первого объекта и данных о номере излучателя из принимаемых сообщений;
- построения опорной системы координат;
- вычисления угловых рассогласований;
- вычисления векторов параллельных переносов.
В частном случае в качестве излучателей и датчиков излучений могут быть использованы приборы, генерирующие/реагирующие на радиоизлучение любого из диапазонов длин волн инфракрасного, видимого, ультрафиолетового, рентгеновского, гамма-излучения или акустические излучения.
При возникновении углов закрытия излучателей/датчиков по отношению к датчикам/излучателям на первом/втором объекте могут размещаться дополнительные излучатели/датчики.
Первый объект может быть неподвижным и часть или все излучатели могут находиться на неподвижном основании, например, на земной поверхности, на дне водоемов, на возвышенностях и в углублениях естественного (горы, скалы, холмы, расщелины, провалы и т.п., в том числе подводные) или/и искусственного (здания, сооружения, специализированные опорные, мачтовые и иные несущие конструкции, в том числе подводные) происхождения.
В частном случае, когда первый объект неподвижен, данные о координатах излучателей, векторе параллельного переноса, а также углах рассогласования опорной системы координат и системы координат первого объекта, могут храниться в памяти вычислителя, что приводит к существенному снижению потребностей в вычислительных мощностях вычислителя и повышению быстродействия.
Список цитируемой литературы:
1. Бабуров С.В. и др. Способ определения относительного положения при межсамолетной навигации. Патент РФ №2624994 от 11.07.2017.
2. Вендель Ян Навигация относительно площадки с использованием измерения расстояний. Патент РФ №2606240 от 10.01.2017.
3. Сетевые спутниковые радионавигационные системы. Под ред. B.C. Шебшаевича - М: Радио и связь, 1993, - 408 с.
4. Сайбель А.Г., Гришин П.С. Разностно-дальномерный способ определения координат источника радиоизлучений и реализующее его устройство. Патент РФ №2309420 от 27.10.2007.
5. Рыжков Б.В. Разностно-дальномерный способ определения координат источника радиоизлучений и реализующее его устройство. Патент РФ №2670142 от 18.10.2018.
6. Жаров В.Е. Сферическая астрономия. - Фрязино, 2006. 480 с.
7. Корн Г., Корн М. Справочник по математике для научных работников инженеров. - М.: Наука, 1984. - 832 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство | 2018 |
|
RU2670142C1 |
| Способ идентификации реперов при решении задачи Р4Р в авиационных оптико-электронных системах позиционирования с единственной камерой | 2020 |
|
RU2749808C1 |
| СПОСОБ ГРУППОВОЙ ВИДЕОНАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2758285C1 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| Способ обеспечения посадки вертолета | 2016 |
|
RU2621215C1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НЕЗАВИСИМОГО ВОЗДУШНОГО НАБЛЮДЕНИЯ В ДАЛЬНЕЙ ЗОНЕ НАВИГАЦИИ | 2017 |
|
RU2663182C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
Заявленная группа изобретений относится к системам навигации и может быть использована при сближении, стыковке, швартовке (причаливании), посадке, контроле взаимного расположения и/или перемещения объектов, в частности, самолетов, космических аппаратов, кораблей в портах, каналах, на рейдах, роботизированных комплексов (беспилотных летательных (подводных) аппаратов, беспилотных транспортных средств) и т.п. Техническим результатом группы изобретений является снижение числа передатчиков, используемых для определения относительных положения и ориентации объектов навигации, уменьшение уровня электромагнитных излучений, улучшение условий электромагнитной совместимости, повышение быстродействия. Способ определения взаимного положения объектов навигации заключается в размещении трех излучателей на или/и вблизи первого объекта в точках с известными в системе координат первого объекта координатами, размещении четырех фиксированных датчиков, образующих тетраэдр, на или/и вблизи второго объекта (объекта навигации) в точках с известными в связанной системе координат второго объекта координатами, определении координат излучателей в системе координат второго объекта, построении опорной системы координат с последующим определением (вычислением) взаимных рассогласований по углам крена/вращения/нутации, тангажа/дифферента/собственного вращения, рыскания/курсового угла/угла поворота/прецессии и координат вектора параллельного переноса начала системы координат второго объекта в начало системы координат первого объекта и выдачей данных в системы принятия решений или/и на устройства отображения или/и документирования в удобном для потребителя формате. 2 н. и 9 з.п. ф-лы, 3 ил.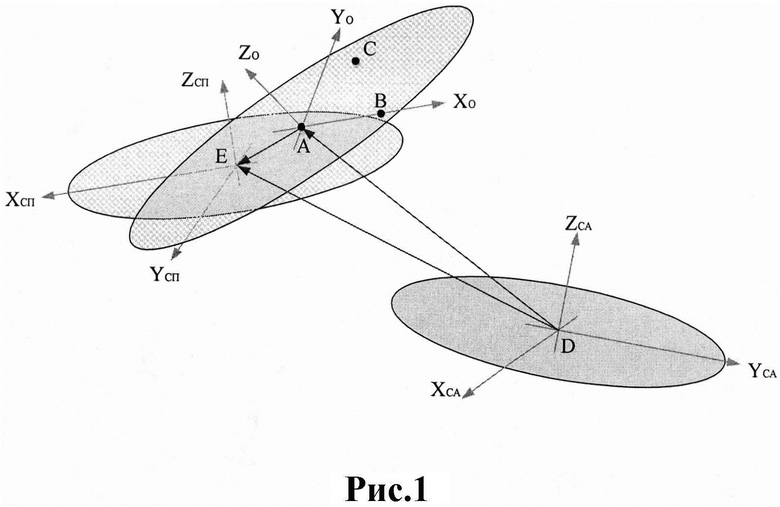
1. Способ определения взаимного положения объектов навигации, включающий размещение на или около первого объекта передатчиков радиосигнала, размещение на или около второго объекта (объекта навигации) приемников радиосигнала, отличающийся тем, что излучатели передатчиков размещаются на или/и около первого объекта в точках с известными в системе координат первого объекта координатами так, чтобы излучатели образовывали треугольник, излучатели радиосигнала излучают радиосигнал, содержащий данные о уникальном номере излучателя, его координатах и позволяющий производить их совместный прием и обработку на приемной стороне, который принимают четыре датчика приемников, размещаемые на или/и около второго объекта в точках с известными в системе координат второго объекта координатами таким образом, чтобы датчики образовывали тетраэдр, вычислитель модулем вычисления координат излучателей производит вычисление координат излучателей первого объекта (xi⋅yi⋅zi), i=1, 2, 3 в системе координат второго объекта, выделяет координаты излучателей и данные о номерах излучателей модулем выделения координат излучателей в системе координат первого объекта и данных о номере излучателя из принимаемых сообщений, модулем построения опорной системы координат производит построение опорной системы координат по трем точкам размещения излучателей в системе координат второго объекта, таким образом, что вектор, перпендикулярный к плоскости треугольника, образованного излучателями и принадлежащего плоскости, определенной по трем точкам размещения излучателей, имел положительную координату Z в системе координат первого объекта и совпадал с одной из осей, например с осью OZ, опорной системы координат, а сама опорная система координат являлась правой, при этом, начало опорной системы координат совпадало с одной из вершин треугольника, а одна из его сторон, примыкающая к указанной вершине, совпадала с другой осью, например с осью ОХ, опорной системы координат, модулем вычисления угловых рассогласований определяет рассогласования по углам крена/вращения/нутации, тангажа/дифферента/собственного вращения, рыскания/курсового угла/угла поворота/прецессии опорной системы координат к системе координат первого и второго объекта, а также приведенных угловых рассогласований системы координат второго объекта к системе координат первого объекта, вычисление модулем вычисления векторов параллельного переноса координат вектора параллельного переноса начала опорной системы координат в начало системы координат первого объекта, координат вектора параллельного переноса начала системы координат второго объекта в начало опорной системы координат, а также приведенных координат вектора параллельного переноса начала системы координат второго объекта в начало системы координат первого объекта, передачу приведенных значений углов рассогласований и вектора параллельного переноса в системы принятия решений или/и на устройства отображения или/и документирования в удобном для потребителя формате.
2. Способ определения взаимного положения объектов навигации по п.1, отличающийся тем, что размещение трех излучателей радиосигнала первого объекта осуществляется таким образом, что одна пара излучателей располагается параллельно одной оси системы координат первого объекта, например, ОХ, или непосредственно на ней, вторая пара, в произвольном направлении или в плоскости параллельной плоскости XOY или в плоскости XOY системы координат первого объекта, соответственно, под углом от 0 до 180 град, к первой паре излучателей, а общая точка пары векторов имела произвольные значения (X, Y, Z) или (X, 0, Z) или (0, 0, Z) или (0, 0, 0), соответственно, в системе координат первого объекта.
3. Способ определения взаимного положения объектов навигации по п.1, отличающийся тем, что излучатели образуют прямоугольный треугольник, при этом, в качестве начала опорной системы координат выбирается вершина треугольника при прямом угле, а две оси опорной системы координат совмещают со сторонами треугольника, образующими прямой угол, правило построения правой опорной системы координат сохраняется, а координата вершины при прямом угле треугольника может иметь произвольные значения (X, Y, Z) или (X, 0, Z) или (0, 0, Z) или (0, 0, 0) в системе координат первого объекта.
4. Способ определения взаимного положения объектов навигации по п.1, отличающийся тем, что одна, две или три плоскости тетраэдра могут совпадать с одной, двумя или тремя плоскостями системы координат второго объекта, а местоположение одного из датчиков может совпадать с началом системы координат второго объекта и/или один из оставшихся трех датчиков и/или любая пара и/или все три датчика, в любой комбинации, совпадают с любой осью или/и комбинацией осей системы координат второго объекта.
5. Способ определения взаимного положения объектов навигации по п.1, отличающийся тем, что для уточнения рассогласований, в качестве дополнительных данных, могут использоваться данные, поступающие от других устройств второго объекта, например, дальномеров, высотомеров, глубиномеров, бортовых инерциальных навигационных систем, спутниковых навигационных систем.
6. Способ определения взаимного положения объектов навигации по п.1, отличающийся тем, что излучаемый сигнал по своей структуре может соответствовать структуре сигнала спутниковых навигационных систем.
7. Система для определения взаимного положения объектов навигации, содержащая передатчики радиосигналов, размещаемые на или около первого объекта, приемники радиосигнала, размещаемые на или около второго объекта (объекта навигации), отличающаяся тем, что излучатели трех передатчиков с кодирующими устройствами размещаются на или/и вблизи первого объекта в точках с известными в системе координат первого объекта координатами так, чтобы излучатели образовывали треугольник, датчики приемников размещаются на или/и вблизи второго объекта в точках с известными в системе координат второго объекта координатами таким образом, чтобы датчики образовывали тетраэдр и были связаны по линиям связи с вычислителем, включающим в свой состав программно-аппаратные модули вычисления координат излучателей, выделения координат излучателей в системе координат первого объекта и данных о номере излучателя из принимаемых сообщений, построения опорной системы координат, вычисления угловых рассогласований, вычисления вектора параллельного переноса и обеспечивающим определение координат излучателей в системе координат второго объекта, выделение данных о координатах излучателей, с последующим построением опорной системы координат первого объекта, связанной с системами координат первого и второго объекта, а также определение взаимных рассогласований по углам крена/вращения/нутации, тангажа/дифферента/собственного вращения, рыскания/курсового угла/угла поворота/прецессии системы координат второго объекта к системе координат первого объекта и координат вектора параллельного переноса начала системы координат второго объекта в начало системы координат первого объекта с последующей выдачей данных в системы принятия решений или/и на устройства отображения или/и документирования в удобном для потребителя формате.
8. Система для определения взаимного положения объектов навигации по п.7, отличающаяся тем, что в качестве излучателей и датчиков излучений используются приборы, генерирующие/реагирующие на радиоизлучение любого из диапазонов длин волн инфракрасного, видимого, ультрафиолетового, рентгеновского или гамма-излучения, или акустические излучения.
9. Система для определения взаимного положения объектов навигации по п.7, отличающаяся тем, что при возникновении углов закрытия излучателей/датчиков по отношению к датчикам/излучателям на первом/втором объекте могут размещаться дополнительные излучатели/датчики.
10. Система для определения взаимного положения объектов навигации по п.7, отличающаяся тем, что первый объект может быть неподвижен, а часть или все излучатели могут находиться на неподвижном основании на земной поверхности, на дне водоемов, на возвышенностях и в углублениях естественного или/и искусственного происхождения.
11. Система для определения взаимного положения объектов навигации по п.10, отличающаяся тем, что данные о координатах излучателей, векторе параллельного переноса, а также углах рассогласования опорной системы координат и системы координат первого объекта, могут храниться в памяти вычислителя.
| НАВИГАЦИЯ ОТНОСИТЕЛЬНО ПЛОЩАДКИ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЙ РАССТОЯНИЯ | 2012 |
|
RU2606240C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДЛЯ ГРУППЫ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2016 |
|
RU2629758C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ И ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2007 |
|
RU2431863C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |
| JP 8036040 A, 06.02.1996 | |||
| WO 2008046363 A1, 24/04/2008 | |||
| US 20180267546 A1, 20.09.2018. | |||

