Изобретение относится к системам навигации летательных аппаратов (ЛА) и может быть использовано при выставке бесплатформенных инерциальных навигационных систем летательного аппарата (БИНС ЛА) корабельного базирования.
На борту современных управляемых ЛА все большее применение находит навигационная система бесплатформенного типа - БИНС, требующая первоначального определения ориентации ее измерительных осей относительно местного горизонта и направления север-юг. От точности начальной выставки непосредственно зависит точность определения навигационных параметров БИНС в полете.
Выставка БИНС на подвижном основании затруднена из-за наличия перегрузок и угловых скоростей, вызванных качкой корабля. На ЛА, базирующихся на корабле, начальная выставка, как правило, осуществляется путем передачи информации о навигационных параметрах от инерциальной системы навигации (ИНС) корабля.
Для информационного обеспечения выставки на подвижном основании в БИНС ЛА должны быть переданы данные о параметрах движения корабля, а именно: углы рысканья, дифферента и крена, северная и восточная составляющие вектора скорости по осям географической системы координат и географические координаты - широта и долгота.
Для учета различий в движении точек местоположения корабельной ИНС и места подготовки ЛА в вышеупомянутую БИНС также должны быть переданы линейные координаты места стоянки ЛА относительно корабельной ИНС (X, Y, Z), угловые скорости изменения углов рысканья, дифферента и крена корабля, линейные перегрузки, измеряемые в связанной системе координат корабля, а также приблизительное (или точное - при наличии датчика угла поворота ПМ по рысканию) значение курса ЛА относительно географического меридиана.
Известен «Способ определения углового положения управляемого аппарата, подвешенного к самолету-носителю», патент № RU 2553776, МПК7 G01C 21/16, принятый нами за прототип.
Способ определения углового положения управляемого аппарата (УА), подвешенного к самолету-носителю (СН), использует выходные сигналы бесплатформенной инерциальной системы (БИНС) УА и БИНС СН для совместной обработки методом фильтрации Калмана. В качестве выходных сигналов БИНС используют сигналы, соответствующие угловым скоростям, измеренным трехкомпонентными датчиками угловых скоростей (ДУС), установленными на УА и СН. Измерение угловых скоростей производят с использованием маневра СН типа «змейка», и на их основе, путем согласования векторов угловых скоростей УА и СН, осуществляют определение углов рассогласования векторов угловой скорости управляемого ЛА и самолета-носителя.
В отличие от самолета-носителя корабль базирования имеет несколько видов качки. Угловые и линейные ускорения корабля базирования в условиях качки служат дополнительной помехой для начальной выставки. У корабля базирования большой инерционный момент и выполнение такого маневра требует много времени, а летательные аппараты должны быть подготовлены к вылету за минимально короткое время. Кроме того, в случае вертикального расположения ЛА на пусковой установке, невозможно использование перегрузок для определения крена и тангажа, что в свою очередь приводит к увеличению времени и снижению точности выставки БИНС ЛА.
Целью настоящего изобретения является сокращение времени выставки БИНС ЛА на корабле при обеспечении требуемой точности.
Поставленная цель достигается за счет того, что согласно заявляемому способу выставки БИНС ЛА корабельного базирования, использующему для совместной обработки методом фильтрации Калмана выходные сигналы БИНС ЛА и ИНС корабля базирования, соответствующие угловым скоростям, измеренным трехкомпонентными датчиками угловых скоростей (ДУС), установленными на ЛА и на корабле, дополнительно измеряют значение курса ЛА относительно географического меридиана (ψг) и осуществляют выставку в два этапа, на первом этапе измеряют линейные ускорения вдоль осей связанной системы координат корабля базирования и связанной системы координат ЛА, определяют координаты БИНС ЛА относительно ИНС корабля и осуществляют выставку по крену и тангажу путем согласования векторов перегрузок с использованием статистического фильтра Калмана второго порядка, при этом выставка может выполняться как в статическом положении корабля базирования, так и при его качке и маневре, на втором этапе осуществляют выставку в азимуте путем измерения и согласования векторов угловых скоростей корабля базирования и ЛА и измерения линейных ускорений вдоль осей связанных систем координат корабля базирования и ЛА, причем, если в течение 5-10 секунд отсутствует качка корабля с угловыми скоростями ωx<2-3 град/с, выполняют маневр корабля типа «зигзаг» и производят обработку сигналов измерения, используя фильтр Калмана третьего порядка с размерностью вектора измерений, равной шести.
С целью повышения точности выставки БИНС ЛА, размещенного на корабле вертикально, по крену и тангажу при углах тангажа, близких к 90 градусам, и для исключения углов рассогласования между ИНС и БИНС, близких по тангажу к 90 градусам, интегральный блок датчиков (ИБД) либо датчики в блоке устанавливают на ЛА с наклоном 45 градусов по тангажу, который затем учитывают в алгоритмах управления и навигации.
Известен «Комплекс начальной выставки инерциальной системы», патент №2238522, МПК7 G01C 23/00, G01C 21/18, опубликован 20.10.2004 г.
Комплекс предназначен для обеспечения начальной выставки инерциальных систем навигации (ИСН) летательных аппаратов, базирующихся на подвижном относительно Земли основании (корабле, самолете-носителе). В состав комплекса входят выставляемая инерциальная система навигации ЛА, базовая система навигации объекта-носителя, промежуточная инерциальная система навигации, блоки формирования невязки, блоки расчета движения основания, блоки фильтрации, блоки анализа состояния. Комплекс содержит два контура коррекции. Один из них включает в себя базовую систему навигации объекта-носителя в качестве корректора и промежуточную инерциальную систему навигации в качестве корректируемой системы, а другой - промежуточную инерциальную систему навигации в качестве корректора и выставляемую инерциальную систему навигации ЛА в качестве корректируемой системы.
Недостатком вышеприведенного изобретения является необходимость иметь для каждого базирующегося ЛА отдельную промежуточную ИНС в качестве корректора. При этом требуется большое время для начальной подготовки БИНС ЛА, базирующегося на корабле.
Заявляемый способ может быть реализован с помощью устройства для выставки БИНС ЛА корабельного базирования, содержащего ИНС корабля базирования и БИНС ЛА, базирующегося на корабле, в которое дополнительно ведены блок формирования матрицы Якоби, задатчик курса и координат точки базирования ЛА, первый статистический фильтр Калмана второго порядка и второй статистический фильтр Калмана третьего порядка, причем выходы ИНС корабля и БИНС ЛА подключены к блоку формирования матрицы Якоби, первый выход блока формирования матрицы Якоби и выход задатчика курса и координат точки базирования ЛА поключены к соответствующим входам первого статистического фильтра Калмана, второй выход блока формирования матрицы Якоби и выходы первого статистического фильтра Калмана подключены к соответствующим входам второго статистического фильтра Калмана, выходы которого подключены к соответствующим входам БИНС ЛА, базирующегося на корабле.
С целью повышения точности выставки интегральный блок датчиков (ИБД) БИНС ЛА, размещенного на корабле вертикально, установлен с наклоном 45 градусов по тангажу.
Сущность изобретения поясняется чертежами, на которых представлены:
на Фиг. 1 - структурная схема заявляемого устройства,
на Фиг. 2, Фиг. 3, Фиг. 4, Фиг. 5 - графики, отражающие поэтапный процесс выставки БИНС заявленным способом.
Устройство для выставки БИНС ЛА корабельного базирования содержит ИНС 1 корабля базирования, БИНС 2 ЛА, базирующегося на корабле, блок 3 формирования матрицы Якоби, задатчик 4 курса и координат точки базирования ЛА, первый статистический фильтр 5 Калмана, второй статистический фильтр 6 Калмана.
Для привязки осей БИНС к осям ИНС формируют матрицу поворота А2, посредством которой определяют три угла рассогласования осей координат БИНС ЛА и корабельной ИНС, при этом используют четыре системы координат: нормальную земную; связанную с осями судна, связанную с осями ИНС и связанную с осями БИНС.
Направления связанных осей ИНС совпадают с направлением связанных осей судна, разница в смещении (выносе) начала координат ИНС. Направления осей судна принимают соответственно направлениям осей, принятым для ЛА: ось ОХ - к носу судна, ось OY - вверх, ось OZ - к правому борту. В спокойном положении судна направления его связанных осей совпадают с направлением земных осей.
На первом этапе определение углов рассогласования выполняют с помощью алгоритма дискретного оценивания вектора состояния, состоящего из двух углов - крена и тангажа, для которого задается априорное нормальное распределение.
Оцениваемый вектор состояния принимают в виде.
Здесь γ - угол рассогласования осей по крену, ϑ - угол рассогласования осей по тангажу, i - номер дискретного момента времени измерений.
Обозначим Z вектор наблюдений измерений датчиков линейных ускорений (ДЛУ) /акселерометров/ и ДУС БИНС.
Здесь zn2i, zω2i - векторы измерений ДЛУ и ДУС БИНС; Vi - вектор ошибок измерений с ковариационной матрицей R размерностью (6×6).
Компоненты вектора Xi полагаются случайными величинами, а процессы их изменения Марковскими.
Дискретные модели динамики изменения оценок искомых углов крена и тангажа описываются стохастическими разностными уравнениями первого порядка.

Здесь Tγ, Tϑ, - постоянные времени корреляции; wγi, wϑi - случайные процессы дискретного белого шума с заданной ковариационной матрицей Q размерностью (2×2).
Матрица дискретной модели объекта имеет вид
Связь между вектором наблюдения Zi и вектором состояния xi устанавливается с помощью матрицы Якоби.
 ,
,
 ,
,
 .
.
Здесь  - оценка матрицы поворота А2 при
- оценка матрицы поворота А2 при  .
.
Вектор производных угловых скоростей  определяют путем численного дифференцирования вектора измерений угловых скоростей zω1i с применением предварительных сглаживающих фильтров.
определяют путем численного дифференцирования вектора измерений угловых скоростей zω1i с применением предварительных сглаживающих фильтров.
Решение задачи оценивания вектора состояния xi по вектору наблюдения Zi представляется рекуррентным алгоритмом уточнения апостериорной плотности  , решаемым в реальном времени вычислителем БИНС.
, решаемым в реальном времени вычислителем БИНС.
Шаг 0.
Задание априорного распределения:  и матриц R, Q.
и матриц R, Q.
Шаг 1. Начало цикла фильтрации по команде начала маневра.
Ввод очередного отсчета измерений датчиков ДУС ИНС и датчиков ДУС ЛА.
Шаг 2.
Прогноз математического ожидания вектора xi по (3), при wϑi=0, wγi=0.
Шаг 3.
Формирование матриц F и Hi по (4), (5).
Шаг 4.
Прогноз ковариационной матрицы.
Шаг 5.
Вычисление коэффициента усиления фильтра.

Шаг 6.
Вычисление апостериорной ковариационной матрицы.

Шаг 7.
Вычисление оценки вектора измерений  , при Vi=0.
, при Vi=0.
Шаг 8.
Вычисление оценки вектора состояния.

Шаг 9.
Рекурсия апостериорного распределения.
 ,
, 
Шаг 10.
Переход к шагу 1.
Окончанием решения является достижение достаточно установившихся значений оценок  .
.
На втором этапе оцениваемый вектор состояния принимается в виде.

Здесь γ - угол рассогласования осей БИНС и ИНС по крену; ϑ - угол рассогласования осей по тангажу, ψ - угол рассогласования осей по рысканию.
Вектор наблюдений Z имеет вид (2).
Дискретные модели динамики изменения оценок искомых углов крена, тангажа и рыскания описываются стохастическими разностными уравнениями первого порядка.


Здесь Tγ, Tϑ, Tψ - постоянные времени корреляции; wγi, wϑi, wψi - случайные процессы дискретного белого шума с заданной ковариационной матрицей Q размерностью (3×3).
Матрица дискретной модели объекта имеет вид
Связь между вектором наблюдения Zi и вектором состояния xi устанавливается с помощью матрицы Якоби.

Алгоритм определения вектора состояния xi по вектору наблюдения Zi идентичен алгоритму выставки на первом этапе с тем отличием, что теперь оцениваются все три угла поворота БИНС относительно ИНС.
Окончанием решения является достижение достаточно установившихся значений оценок  .
.
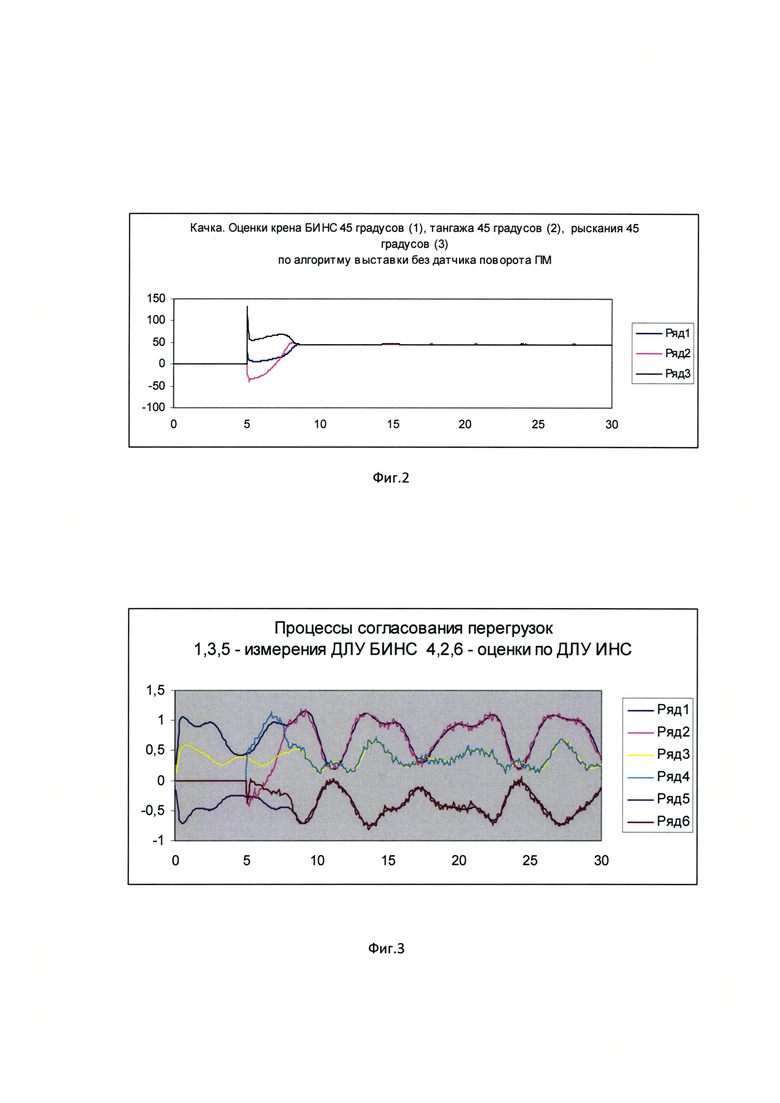
На Фиг. 2 приведены процессы оценивания крена, тангажа и рыскания БИНС на втором этапе выставки без использования измерения датчика угла поворота ПМ.
На Фиг. 3 приведены измерения ДЛУ БИНС и их оценки по измерениям ДЛУ ИНС при выставке на втором этапе (без датчика поворота ПМ по рысканию).
Алгоритм выставки на втором этапе (без учета датчика поворота ПМ), в отличие от алгоритма выставки на первом этапе (с учетом датчика поворота ПМ), более точно работает при условии достаточно интенсивных переходных процессов. При этом наиболее значимым для успешной идентификации углов поворота БИНС является переходный процесс по крену. Угловая скорость изменения крена должна изменяться не медленнее, чем в темпе бортовой качки и с амплитудами не менее 2-3 град/с в течение 5-10 секунд. При переходе на второй этап необходимо определить угловую скорость изменения крена ωх корабля, если ωx<2-3 град/с требуется выполнение маневра типа «зигзаг». Маневр этого типа выполняется по курсу, но его основной целью для идентификации углов поворота БИНС является создание переходного процесса по крену. Если бы судно могло выполнить движение по крену без изменения курса, то этого было бы достаточно и в «зигзаге» необходимости не было бы. Но поскольку движение по крену является следствием изменения курса, то для правдоподобности численного эксперимента имитировались два переходных процесса - по курсу и по крену, продолжительностью порядка 10 секунд.
На Фиг. 4. приведены процессы оценивания крена и тангажа БИНС на первом этапе выставки при маневре корабля базирования, при ошибке датчика угла поворота ПМ по рысканию 0.5 градуса.
На Фиг. 5. приведены измерения ДЛУ БИНС и их оценки по измерениям ДЛУ ИНС при маневре, при выставке на первом этапе (с датчиком поворота ПМ по рысканию).
При согласовании векторов перегрузок угловых скоростей необходимо определять параметры ориентации БИНС относительно ИНС в виде матрицы поворота, в особых точках которой задача теряет обусловленность. Наиболее критичной является точка поворота БИНС относительно ИНС по тангажу 90 градусов. При приближении угла поворота БИНС по тангажу к 90 градусам значительно возрастает ошибка оценивания поворота БИНС по крену. Для устранения этой проблемы предлагается блок датчиков БИНС устанавливать на ЛА с некоторым начальным углом поворота, например 45 градусов по тангажу относительно продольной строительной оси.
Таким образом, на первом этапе выставки используют фильтр Калмана второго порядка и определяют углы поворота ЛА по крену и тангажу, а угол рыскания берут от задатчика курса и координат точки базирования ЛА. Исключаются грубые ошибки определения крена и тангажа БИНС. На втором этапе с помощью фильтра Калмана третьего порядка определяют все три угла поворота БИНС ЛА относительно ИНС. В обоих этапах выставки вектор наблюдения имеет размерность, равную шести, и учитывает измерения датчиков ДУС и ДЛУ БИНС. Измерения датчиков ДУС и ДЛУ ИНС используют для формирования матрицы Якоби.
Контроль правильности решения осуществляется проверкой малости среднего модуля рассогласования угловых скоростей  на последней секунде маневра. В данном примере пороговое значение, по которому принимается решение о правильной оценке углов рассогласования осей, достаточно принять равным 0.1 град/с.
на последней секунде маневра. В данном примере пороговое значение, по которому принимается решение о правильной оценке углов рассогласования осей, достаточно принять равным 0.1 град/с.
Таким образом, использование изобретения позволяет привести в готовность управляемый аппарат, в частности ЛА, за время, не превышающее 30 секунд, с требуемой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| Способ динамической юстировки систем координат вертолета на основе их векторного согласования | 2023 |
|
RU2795354C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2256154C1 |


Изобретения относятся к области систем навигации летательных аппаратов (ЛА) и могут быть использованы при выставке бесплатформенных инерциальных навигационных систем летательного аппарата (БИНС ЛА) корабельного базирования. Технический результат - сокращение времени выставки БИНС ЛА на корабле при обеспечении требуемой точности. Для этого способ выставки БИНС ЛА, основанный на совместной обработке методом фильтрации Калмана выходных сигналов БИНС ЛА и ИНС корабля базирования, соответствующих угловым скоростям, измеренным трехкомпонентными датчиками угловых скоростей (ДУС), установленными на ЛА и на корабле, дополнительно включает в себя измерение значения курса ЛА относительно географического меридиана (ψг), причем выставку осуществляют в два этапа. На первом этапе измеряют линейные ускорения вдоль осей связанной системы координат корабля базирования и связанной системы координат ЛА, определяют координаты БИНС ЛА относительно ИНС корабля и осуществляют выставку по крену и тангажу путем согласования векторов перегрузок с использованием статистического фильтра Калмана второго порядка, при этом выставка может выполняться как в статическом положении корабля базирования, так и при его качке и маневре. На втором этапе осуществляют выставку в азимуте путем измерения и согласования векторов угловых скоростей корабля базирования и ЛА и измерения линейных ускорений вдоль осей связанных систем координат корабля базирования и ЛА, причем, если в течение 5-10 секунд отсутствует качка корабля с угловыми скоростями ωx<2-3 град/с, выполняют маневр корабля типа «зигзаг» и производят обработку сигналов измерения, используя фильтр Калмана третьего порядка с размерностью вектора измерений, равной шести. Устройство, реализующее данный способ выставки БИНС ЛА корабельного базирования, включающее ИНС корабля базирования и БИНС ЛА, базирующегося на корабле, дополнительно содержит блок формирования матрицы Якоби, задатчик курса и координат точки базирования ЛА, первый статистический фильтр Калмана второго порядка и второй статистический фильтр Калмана третьего порядка, причем выходы ИНС корабля и БИНС ЛА подключены к блоку формирования матрицы Якоби. Первый выход блока формирования матрицы Якоби и выход задатчика курса и координат точки базирования ЛА подключены к соответствующим входам первого статистического фильтра Калмана. Второй выход блока формирования матрицы Якоби и выходы первого статистического фильтра Калмана подключены к соответствующим входам второго статистического фильтра Калмана, выходы которого подключены к соответствующим входам БИНС ЛА, базирующегося на корабле. 2 н. и 2 з.п. ф-лы, 5 ил.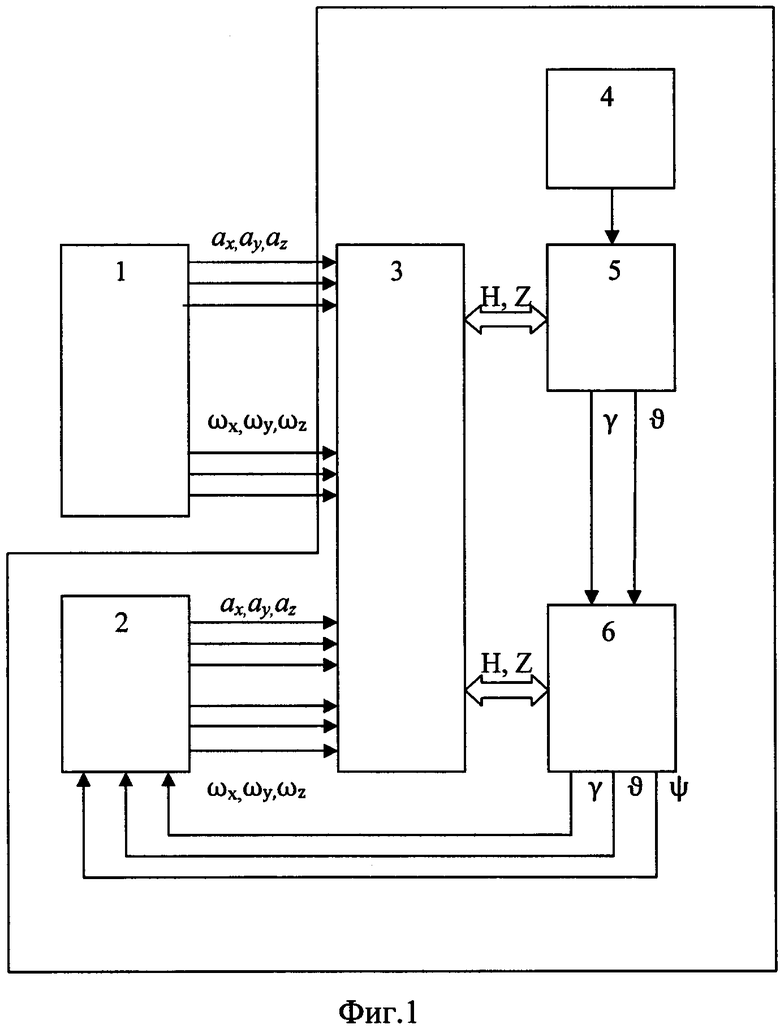
1. Способ выставки БИНС ЛА корабельного базирования, использующий для совместной обработки методом фильтрации Калмана выходные сигналы БИНС ЛА и ИНС корабля базирования, соответствующие угловым скоростям, измеренным трехкомпонентными датчиками угловых скоростей (ДУС), установленными на ЛА и на корабле, отличающийся тем, что дополнительно измеряют значение курса ЛА относительно географического меридиана (ψг) и осуществляют выставку в два этапа, на первом этапе измеряют линейные ускорения вдоль осей связанной системы координат корабля базирования и связанной системы координат ЛА, определяют координаты БИНС ЛА относительно ИНС корабля и осуществляют выставку по крену и тангажу путем согласования векторов перегрузок с использованием статистического фильтра Калмана второго порядка, при этом выставка может выполняться как в статическом положении корабля базирования, так и при его качке и маневре, на втором этапе осуществляют выставку в азимуте путем измерения и согласования векторов угловых скоростей корабля базирования и ЛА и измерения линейных ускорений вдоль осей связанных систем координат корабля базирования и ЛА, причем, если в течение 5-10 секунд отсутствует качка корабля с угловыми скоростями ωx<2-3 град/с, выполняют маневр корабля типа «зигзаг» и производят обработку сигналов измерения, используя фильтр Калмана третьего порядка с размерностью вектора измерений, равной шести.
2. Способ по п. 1, отличающийся тем, что для выставки БИНС ЛА, размещенного на корабле вертикально, по крену и тангажу при углах тангажа, близких к 90 градусам, и для исключения углов рассогласования между ИНС и БИНС, близких по тангажу к 90 градусам, интегральный блок датчиков (ИБД) БИНС, либо датчики в блоке, устанавливают с наклоном 45 градусов по тангажу, который затем учитывают в алгоритмах управления и навигации.
3. Устройство для выставки БИНС ЛА корабельного базирования, содержащее ИНС корабля базирования и БИНС ЛА, базирующегося на корабле, отличающееся тем, что в него дополнительно ведены блок формирования матрицы Якоби, задатчик курса и координат точки базирования ЛА, первый статистический фильтр Калмана второго порядка и второй статистический фильтр Калмана третьего порядка, причем выходы ИНС корабля и БИНС ЛА подключены к блоку формирования матрицы Якоби, первый выход блока формирования матрицы Якоби и выход задатчика курса и координат точки базирования ЛА подключены к соответствующим входам первого статистического фильтра Калмана, второй выход блока формирования матрицы Якоби и выходы первого статистического фильтра Калмана подключены к соответствующим входам второго статистического фильтра Калмана, выходы которого подключены к соответствующим входам БИНС ЛА, базирующегося на корабле.
4. Устройство по п. 3, отличающееся тем, что интегральный блок датчиков (ИБД) БИНС ЛА, размещенного на корабле вертикально, установлен с наклоном 45 градусов по тангажу.
| КОМПЛЕКС НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2003 |
|
RU2238522C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
| US 6408245 B1, 18.06.2002 | |||
| СПОСОБ ПЕРЕРАБОТКИ МОНАЦИТА | 2005 |
|
RU2323989C2 |
| Ривкин С.С | |||
| Метод оптимальной фильтрации Калмана и его применение в инерциальных навигационных системах | |||
| - Л.: Судостроение, 1974, 219 с | |||
| Ботуз С.П., Стреж С.В | |||
| Методы и средства разработки многопроцессорных систем контроля и управления группировкой сверхмалых космических аппаратов/ В кн.: Научный сервис в сети Интернет: ре-шение больших задач | |||
| - М.: НИВЦ МГУ, 2008 | |||
| с | |||
| Горный компас | 0 |
|
SU81A1 |

