Изобретение относится к навигации и предназначено для счисления координат группы летательных аппаратов (ЛА). Может использоваться как для автономной навигации, так и для работы в комплексе с другими навигационными системами.
Известен способ определения ориентации подвижного объекта по координатам реперных источников (РИ), включающий определение сигналов, соответствующих положению изображения РИ в плоскости фотодетектора, определение углов пеленгов каждого РИ по полученным сигналам с учетом фокусного расстояния объектива и определение координат РИ по данным углов-пеленгов с учетом расстояния между РИ.
Этот способ реализован в устройстве, содержащем реперные источники на подвижном объекте, а на неподвижном - два фотоприемных оптико-локационных блока и блок определения координат РИ и ориентации подвижного объекта, описанный в патенте на изобретение [Патент GB №2002986 А, опубл. 28.02.1979].
Недостатком описанного аналога является использование реперных источников с известным расположением на подвижном объекте, что обеспечивает определение только ориентации подвижного объекта при неизвестном местоположении, то есть не может обеспечить навигацию объекта.
Известен наиболее близкий к заявляемому изобретению способ видеонавигации подвижного объекта, основанный на последовательном фотоэкспонировании земной поверхности фотокамерами стереопары установленной на подвижном объекте, выделении на изображении каждой фотокамеры по меньшей мере трех особых точек земной поверхности, вычислении их координат в связанной системе координат, определении углового и линейного перемещения подвижного объекта относительно земной поверхности за временной интервал между двумя фотоэкспозициями, определении углового и линейного перемещения подвижного объекта за время движения и, определении текущих координат местоположения, описанный в патенте на изобретение RU №2626017, Опубл: 21.07.2017 [2].
Недостатком этого способа является невозможность его использования для решения задачи счисления координат посредством стереопары, установленной на малоразмерном беспилотном летательном аппарате поскольку для достижения высокой точности измерения требуется значительное расстояние между фотокамерами стереопары.
Технический результат изобретения достигается тем, что в способе видеонавигации подвижного объекта, основанном на фотоэкспонировании земной поверхности стереопарой, обработке ее оцифрованных изображений и вычислении координат местоположения подвижного объекта, регистрируют излучения трех лазерных меток с широкой диаграммой направленности, установленных на ведущем ЛА группы посредством бортовой фотокамеры ведомого ЛА, осуществляют обработку оцифрованного изображения лазерных меток, определяют координаты их изображений на фотоматрице, определяют линейные и угловые координаты взаимного расположения ведущего и ведомого летательных аппаратов, посредством видеокамер ведущего и ведомого выполняют фотоэкспонирование, стереоотождествление и определение координат изображений трех особых точек земной поверхности, не лежащих на одной прямой в моменты двух последовательных фотоэкспозиций фотокамер, вычисляют приращение линейных и угловых координат ведущего ЛА относительно земной поверхности за время между фотоэкспозициями и осредняют их для всех ЛА группы, вычисляют приращение линейных и угловых координат ведущего ЛА относительно земной поверхности за время полета, вычисляют местоположение ведущего ЛА с учетом его начальных координат.
Сущность изобретения заключается в том, фотоэкспонируют земную поверхность стереопарой, обрабатывают ее оцифрованные изображения и вычисляют координаты местоположения подвижного объекта, отличающийся тем, что регистрируют излучения трех лазерных меток с широкой диаграммой направленности, установленных на ведущем ЛА группы посредством бортовой фотокамеры ведомого ЛА, осуществляют обработку оцифрованного изображения лазерных меток, определяют координаты их изображений на фотоматрице, определяют линейные и угловые координаты взаимного расположения ведущего и ведомого летательных аппаратов, посредством видеокамер ведущего и ведомого выполняют фотоэкспонирование, стереоотождествление и определение координат изображений трех особых точек земной поверхности, не лежащих на одной прямой в моменты двух последовательных фотоэкспозиций фотокамер, вычисляют приращение линейных и угловых координат ведущего ЛА относительно земной поверхности за время между фотоэкспозициями и осредняют их для всех ЛА группы, вычисляют приращение линейных и угловых координат ведущего ЛА относительно земной поверхности за время полета, вычисляют местоположение ведущего ЛА с учетом его начальных координат.
Способ обеспечивает расширение возможностей применения групп малоразмерных беспилотных летательных аппаратов, каждый из которых оснащен только одной видеокамерой. При этом критически важным условием является возможность высокоточного определения их взаимного расположения. Рассмотрим задачу определения местоположения двух ЛА (ведущего и одного из ведомых группы), оснащенных монокулярными системами технического зрения и выполняющих полет строем, относительно земной поверхности.
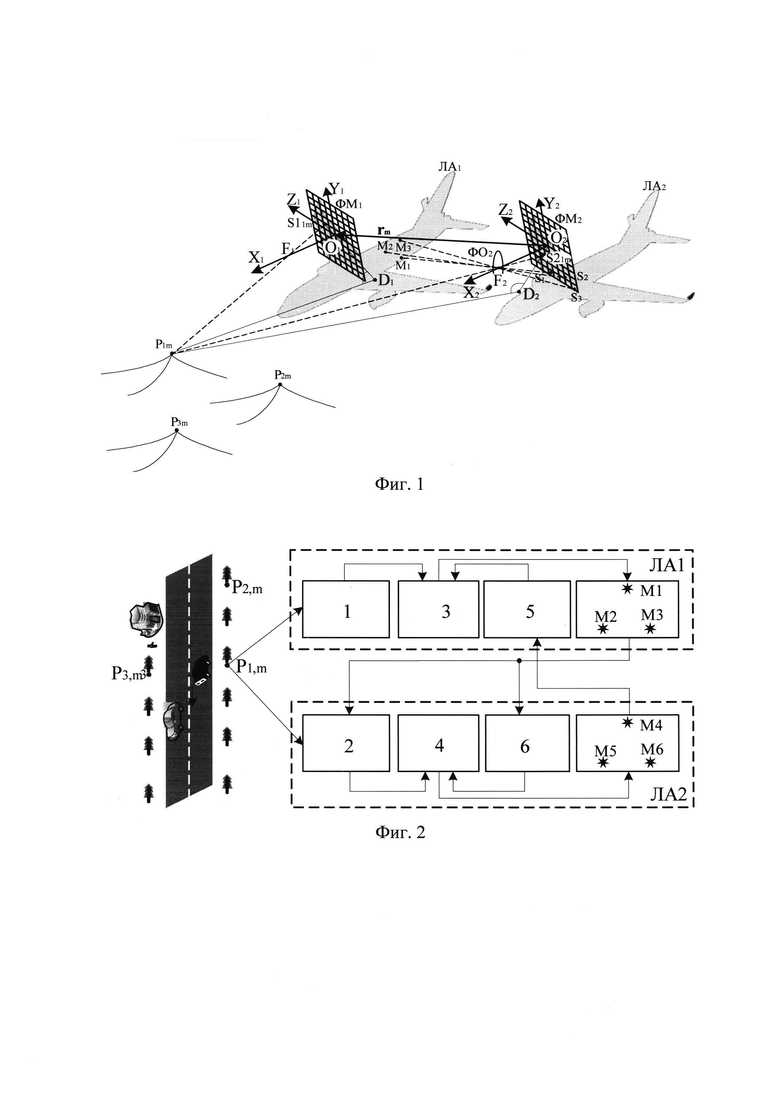
На фиг. 1 представлена оптическая схема счисления координат, где показано расположение трех лазерных ИК меток M1, М2 и М3 на ведущем ЛА1 и система координат O1X1Y1Z1 связанная с ним, а также система координат O2X2Y2Z2 связанная с ведомым ЛА2 и фотокамера с ее элементами, фотообъективом ФО2 и фоточувствительной матрицей ФМ2 с изображениями меток S1, S2 и S3 на ней, установленные на ведомом ЛА, в процессе определения угловой ориентации и местоположения ведущего ЛА относительно ведомого, Pn,m - n-я точка на земной поверхности (n=1…3) в момент m-й фотоэкспозиции, -S1n,m, S2n,m - изображения точки Pn,m на фотоматрицах ФМ1 и ФМ2, F1, F2 - оптические центры фотообъективов.
На фиг. 2 изображена структура системы групповой видеонавигации, включающая две монокулярные системы технического зрения, расположенные на двух беспилотных летательных аппаратах, связанных информационно посредством системы межсамолетной навигации. Монокулярная система технического зрения ведущего и ведомого ЛА включает в себя следующие элементы: фотокамера (1, 2); цифровой вычислитель (3, 4); фотоприемник (5, 6); три лазерные ИК метки (M1, М2, М3 и М4, М5, М6).
Способ реализуется следующим образом.
Прямоугольная система координат O2X2Y2Z2 связанная с ведомым ЛА (фиг. 1), ось О2Х2 - параллельна продольной оси ЛА, O2Z2 - параллельна поперечной оси, а ось O2Y2 дополняет их до правой системы координат. Фоточувствительная матрица ФМ2, размещенная в фокальной плоскости фотообъектива ФО, находится в плоскости координат O2Y2Z2. Оптическая ось фотообъектива О2Х2 параллельна продольной оси ЛА. Система координат O1X1Y1Z1 связана с ведущим ЛА, где ось O1X1 направлена по продольной оси ЛА, ось O1Z1 - поперечная ось ЛА, а ось O1Y1 дополняет их до правой системы координат. В этой системе координат рассматриваются три точки M1, М2, М3 (лазерные ИК-метки), связанные с окончаниями элементов конструкции, причем важно, чтобы эти точки не перекрывались другими элементами при любых взаимных положениях ЛА.
Уравнения, описывающие положение ведомого ЛА2 относительно ведущего, полученные в работе [Патент RU №2700908, Опубл: 23.09.2019] имеют вид
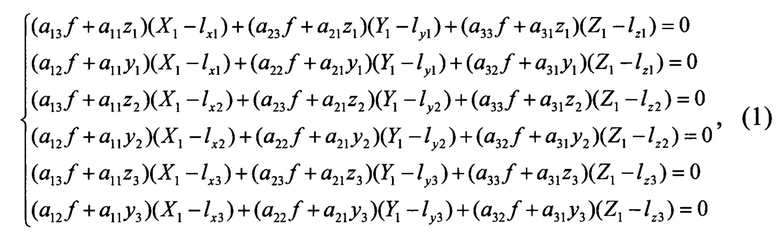
где  - фокусное расстояние объектива фотокамеры;
- фокусное расстояние объектива фотокамеры;  - координаты лазерных меток в системе координат связанной с ведущим ЛА; X1, Y1, Z1, α, β, χ - искомые координаты взаимного положения ведомого относительно ведущего; aij(i,j=1..3) - коэффициенты матрицы A направляющих косинусов, описывающие угловое движение ведомого ЛА относительно ведущего
- координаты лазерных меток в системе координат связанной с ведущим ЛА; X1, Y1, Z1, α, β, χ - искомые координаты взаимного положения ведомого относительно ведущего; aij(i,j=1..3) - коэффициенты матрицы A направляющих косинусов, описывающие угловое движение ведомого ЛА относительно ведущего

Используя решение системы уравнений (1) вычисляются линейные  и угловые
и угловые  координаты ведомого летательного аппарата относительно ведущего. Решение этой системы уравнений осуществляется методом Ньютона-Рафсона.
координаты ведомого летательного аппарата относительно ведущего. Решение этой системы уравнений осуществляется методом Ньютона-Рафсона.
При наличии измеренных значений линейных X1, Y1, Z1 и угловых α, β, χ координат ведомого летательного аппарата относительно ведущего, монокулярные системы технического зрения ЛА1 и ЛА2 используются для создания бинокулярной системы, при этом формируется двусторонний обмен информацией, используемой для вычислений посредством оптико-электронных средств измерения (лазерных меток и фотоприемников).
Для описания функционирования такой системы технического зрения выразим связь между измеряемыми координатами X1, Y1, Z1, α, β, χ, а также координатами изображений особых точек на фотоматрицах бинокулярной СТЗ. Связь ортов систем координат O1X1Y1Z1 и O2X2Y2Z2 описывается известными соотношениями
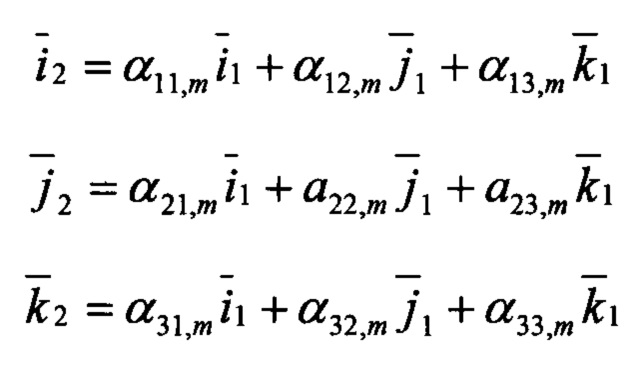
где матрица преобразования имеет вид

Двумя способами выражается вектор  и приравниваются правые части этих выражений:
и приравниваются правые части этих выражений:

Вектора  и
и  выражаются посредством следующих соотношений, которые следуют из подобия пар треугольников
выражаются посредством следующих соотношений, которые следуют из подобия пар треугольников 
 и
и  а также запишем выражения векторов
а также запишем выражения векторов  и
и 



где  и
и  - проекции векторов
- проекции векторов  и
и  на оси O1X1 и О2Х2;
на оси O1X1 и О2Х2; 
 - координаты изображения особой точки
- координаты изображения особой точки  на фотоматрицах ФМ1 и ФМ2;
на фотоматрицах ФМ1 и ФМ2;  и
и  - единичные орты в системах координат O1X1Y1Z1 и O2X2Y2Z2; F=OF=O1F1 - фокусное расстояние объектива; первый индекс в обозначении координат - номер фотоматрицы.
- единичные орты в системах координат O1X1Y1Z1 и O2X2Y2Z2; F=OF=O1F1 - фокусное расстояние объектива; первый индекс в обозначении координат - номер фотоматрицы.
С учетом полученных выражений перепишем векторное равенство (2), выразим связь измеряемых посредством межсамолетной системы навигации вектора  и координат изображений особой точки на фотоматрицах бинокулярной СТЗ запишем в виде следующего соотношения
и координат изображений особой точки на фотоматрицах бинокулярной СТЗ запишем в виде следующего соотношения

Используя выражения для ортов  получим
получим

Проецируя последнее равенство на оси системы координат O1X1Y1Z1, получим


Используем в этих уравнениях следующие обозначения
 получим
получим

Из этих уравнений выразим неизвестные  и
и 

Используя ранее полученные соотношения (3), выразим координаты точки Р земной поверхности в системе координат O1X1Y1Z1
Полученные соотношения позволяют определять координаты любой контрастной точки земной поверхности в системе координат связанной с фотоматрицей ведущего ЛА. Это дает основание говорить о возможности построения измерительной системы технического зрения, размещенной на двух летательных аппаратах группы, связанных между собой системой межсамолетной навигации.
Работа системы групповой системы видеонавигации сводится к измерению координат контрастных точек  земной поверхности посредством распределенной бинокулярной системы технического зрения, включающей фотокамеры 1, 2 и цифровые вычислители 3, 4 обоих ЛА. Информационное взаимодействие цифровых вычислителей осуществляется через двунаправленный оптико-электронный канал связи (фотоприемники 5 и 6 - лазерные метки M1, М2, М3). Импульсное излучение лазерных меток имеет две составляющие - навигационную и информационную. Первая из них воздействует на фотокамеру 2 второго ЛА и обеспечивает измерение взаимного положения летательных аппаратов. Информационная составляющая сигналов лазерных меток обеспечивает взаимный обмен цифровых вычислителей 3 и 4, в которых осуществляется обработка изображений земной поверхности, отыскание оптических контрастов (Р) и их стереоотождествление, а также решение вычислительной задачи в соответствии с алгоритмом (соотношения 8).
земной поверхности посредством распределенной бинокулярной системы технического зрения, включающей фотокамеры 1, 2 и цифровые вычислители 3, 4 обоих ЛА. Информационное взаимодействие цифровых вычислителей осуществляется через двунаправленный оптико-электронный канал связи (фотоприемники 5 и 6 - лазерные метки M1, М2, М3). Импульсное излучение лазерных меток имеет две составляющие - навигационную и информационную. Первая из них воздействует на фотокамеру 2 второго ЛА и обеспечивает измерение взаимного положения летательных аппаратов. Информационная составляющая сигналов лазерных меток обеспечивает взаимный обмен цифровых вычислителей 3 и 4, в которых осуществляется обработка изображений земной поверхности, отыскание оптических контрастов (Р) и их стереоотождествление, а также решение вычислительной задачи в соответствии с алгоритмом (соотношения 8).
Рассмотрим схему измерения пространственного перемещения ведущего группы летательных аппаратов посредством установленных на них фотокамер стереопары (фиг. 1), при этом на земной поверхности используется группа из трех особых точек  (индекс n=1, 2, 3, … - номер особой точки). Здесь прямоугольная система координат
(индекс n=1, 2, 3, … - номер особой точки). Здесь прямоугольная система координат  связана с подвижным объектом в m-м пространственном положении (в m-й момент времени), фотоматрицы ФМ1, ФМ2 цифровых фотокамер 1 и 2 стереопары расположены в плоскости
связана с подвижным объектом в m-м пространственном положении (в m-й момент времени), фотоматрицы ФМ1, ФМ2 цифровых фотокамер 1 и 2 стереопары расположены в плоскости  а оптические оси объективов параллельны оси
а оптические оси объективов параллельны оси  Центры фотоматриц O1,m (O2,m) расположены симметрично относительно начала координат Om (Om+1 - его положение в m+1-й момент времени) на расстояниях В/2. Системы координат
Центры фотоматриц O1,m (O2,m) расположены симметрично относительно начала координат Om (Om+1 - его положение в m+1-й момент времени) на расстояниях В/2. Системы координат  и
и  лежат в плоскости фотоматриц, причем оси
лежат в плоскости фотоматриц, причем оси  и
и  параллельны оси
параллельны оси  а оси
а оси  и
и  совпадают с осью
совпадают с осью  В точках F1 и F2 располагаются геометрические центры объективов левой и правой фотокамер, формирующих оптические изображения S1m и S2m особой точки земной поверхности
В точках F1 и F2 располагаются геометрические центры объективов левой и правой фотокамер, формирующих оптические изображения S1m и S2m особой точки земной поверхности  а в следующий момент времени - S1m+1 и S2m+1. Точки D1 и D2 - проекции точки P1m на плоскости фотоматриц ФМ1 (O1Y1Z1) и ФМ2 (O2Y2Z2).
а в следующий момент времени - S1m+1 и S2m+1. Точки D1 и D2 - проекции точки P1m на плоскости фотоматриц ФМ1 (O1Y1Z1) и ФМ2 (O2Y2Z2).
Выделение на изображении каждой фотокамеры по меньшей мере трех особых точек земной поверхности может быть выполнено путем программной обработки изображений земной поверхности, которая может осуществляться, например, методом ускоренной проверки сегментов (FAST) яркости точек, образующих окружность заданного радиуса.
Определение координат  изображений трех особых точек
изображений трех особых точек  на фотоматрицах из положений в моменты времени m-й фотоэкспозиции обеспечивает вычисление координат
на фотоматрицах из положений в моменты времени m-й фотоэкспозиции обеспечивает вычисление координат  n-й особой точки
n-й особой точки  относительно подвижного объекта в связанной системе координат по формулам (8).
относительно подвижного объекта в связанной системе координат по формулам (8).
Положение системы координат  связанной с подвижным объектом, относительно ее предыдущего положения
связанной с подвижным объектом, относительно ее предыдущего положения  задается вектором смещения начала координат
задается вектором смещения начала координат  а изменение углового положения системы
а изменение углового положения системы  - матрицей направляющих косинусов.
- матрицей направляющих косинусов.

где 

 - углы последовательных разворотов подвижного объекта вокруг осей
- углы последовательных разворотов подвижного объекта вокруг осей 
 соответственно, за время между двумя последовательными фотоэкспозициями.
соответственно, за время между двумя последовательными фотоэкспозициями.
Запишем соотношение, связывающее измеряемые вектора  и
и  в системах
в системах  соответственно
соответственно

где  - вектор, с началом в точке
- вектор, с началом в точке  а конец в точке
а конец в точке  отсчитанный в системе координат
отсчитанный в системе координат  а также очевидное векторное равенство, связывающее m и m+1 экспозиции
а также очевидное векторное равенство, связывающее m и m+1 экспозиции

Поскольку, вектор  измерить методом прямых измерений не возможно, то для того чтобы воспользоваться равенством (9), необходимо выразить этот вектор в проекциях на оси системы координат
измерить методом прямых измерений не возможно, то для того чтобы воспользоваться равенством (9), необходимо выразить этот вектор в проекциях на оси системы координат  получим
получим

Полученное соотношение содержит шесть неизвестных величин  а также вектора
а также вектора  и
и  доступные для прямых измерений, и для совокупности трех особых точек представляет собой систему 9 нелинейных алгебраических уравнений, которая может быть решена применением специальных численных методов, использующихся для таких переопределенных систем.
доступные для прямых измерений, и для совокупности трех особых точек представляет собой систему 9 нелинейных алгебраических уравнений, которая может быть решена применением специальных численных методов, использующихся для таких переопределенных систем.
Чтобы избежать этого, найдем аналитическое решение задачи. Применим соотношение (10) для трех особых точек земной поверхности, на положение которых накладывается следующее условие, они образуют треугольник ненулевой площади (не лежат на одной прямой)

Вычитая из второго соотношения первое, а из третьего второе, получим
Запишем также соотношение, описывающее преобразование координат вектора равного векторному произведению этих векторов, поскольку, для нашей цели необходим вектор, не являющийся линейной комбинацией выбранных векторов
Три последних соотношения используем для записи матричного соотношения, в котором матрицы-столбцы занимают место столбцов в блочных матрицах, такая запись следует из правила умножения матриц
Из последнего матричного равенства выразим искомую матрицу (Am) путем умножения справа обеих частей равенства на матрицу обратную сомножителю матрицы (Am). Отметим, что определитель этой матрицы не равен нулю, поскольку три вектора, координаты которых записаны в столбцах матрицы, являются линейно не зависимыми и, следовательно, обратная матрица существует.
Поскольку все координаты векторов в выражении матрицы  непосредственно измеряются с помощью СТЗ в моменты m и m+1 экспозиций, то соотношение (12) используется для вычисления углового перемещения подвижного объекта относительно земной поверхности за интервал времени между двумя фотоэкспозициями. Для определения вектора линейного перемещения подвижного объекта
непосредственно измеряются с помощью СТЗ в моменты m и m+1 экспозиций, то соотношение (12) используется для вычисления углового перемещения подвижного объекта относительно земной поверхности за интервал времени между двумя фотоэкспозициями. Для определения вектора линейного перемещения подвижного объекта  воспользуемся соотношением (11) при n=1.
воспользуемся соотношением (11) при n=1.

Матрица, описывающая вращательное движение подвижного объекта из начального в конечное положение записывается в виде произведения матриц, описывающих вращения за интервалы времени между двумя последовательными фотоэкспозициями.

Для определения координат подвижного объекта необходимо учесть начальное угловое и пространственное его положение, которое зададим географическими координатами ϕ0 - широтой, λ0 - долготой, R0 - удалением от центра земли, а его угловое положение относительно земли углами курса - ψ0, крена - γ0 и тангажа - υ0, тогда конечное угловое положение подвижного объекта определим посредством матрицы.

где

Матрица, определяющая начальное угловое положение подвижного объекта.
Задача определения начального положения подвижного объекта в навигации известна как начальная выставка системы, для ее осуществления используется несколько известных методов.
Находим приращения географических координат за один m-й интервал времени между последовательными фотоэкспозициями, а путем суммирования выразим текущие координаты подвижного объекта в m-й (текущий) момент, при этом учтем начальное местоположение объекта. Вычисляем текущие координаты местоположения подвижного объекта по следующим формулам
где  - элементы матрицы направляющих косинусов вида (15) определяемые текущими углами крена, курса и тангажа подвижного объекта.
- элементы матрицы направляющих косинусов вида (15) определяемые текущими углами крена, курса и тангажа подвижного объекта.
Поскольку изображения земной поверхности содержат значительное число контрастных точек, то целесообразно обеспечить многократные измерения координат подвижного объекта с обработкой их результатов. Это обеспечит снижение погрешностей измерений, а также текущий контроль уровня этих ошибок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигации подвижного объекта | 2016 |
|
RU2626017C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2018 |
|
RU2700908C1 |
| СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2706444C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| Способ обеспечения посадки вертолета | 2016 |
|
RU2621215C1 |
| СПОСОБ КОМПЕНСАЦИИ ДИСТОРСИИ ОБЪЕКТИВА | 2022 |
|
RU2790055C1 |
| СПОСОБ НАВИГАЦИИ БЕСПИЛОТНЫХ МОБИЛЬНЫХ СРЕДСТВ | 2020 |
|
RU2739510C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
Изобретение относится к навигации и предназначено для счисления координат летательных аппаратов (ЛА). Может использоваться как для автономной навигации, так и для работы в комплексе с другими навигационными средствами. Техническим результатом является расширение возможностей применения групп малоразмерных беспилотных летательных аппаратов, каждый из которых оснащен только одной видеокамерой. Предложенный способ заключается в том, что пары монокулярных систем технического зрения (СТЗ) ведомого и ведущих ЛА группы образуют бинокулярные системы, взаимное расположение цифровых фотокамер которых определяется посредством оптико-электронной системы межсамолетной навигации, которая состоит из трех лазерных широконаправленных меток ведущего ЛА и СТЗ ведомого. Совместное функционирование пар СТЗ обеспечивается обменом информацией посредством двусторонней оптико-электронной линии связи. Для определения текущих координат ведущего ЛА используют изображения по крайней мере трех оптических контрастов земной поверхности на фотокамерах ведомого и ведущего в двух последовательных фотоэкспозициях, вычисляют приращения координат ведущего, осредняют эти приращения для всех пар ведомых и ведущих, а затем вычисляют приращения координат за время полета и суммируют с начальными координатами ЛА. 2 ил.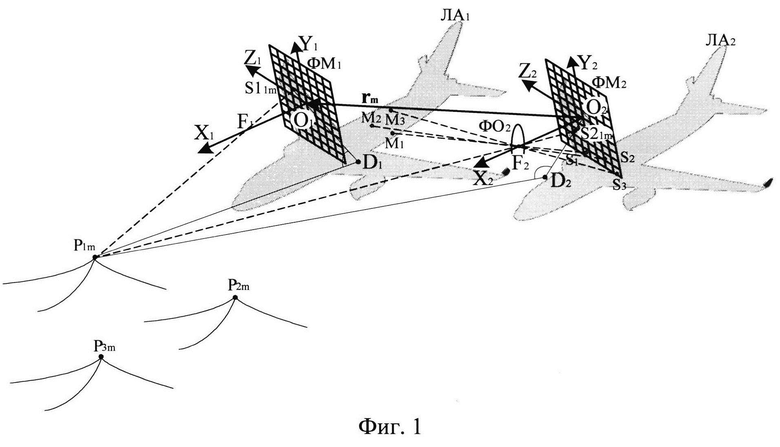
Способ групповой видеонавигации летательных аппаратов, основанный на фотоэкспонировании земной поверхности стереопарой, обработке ее оцифрованных изображений и вычислении координат местоположения подвижного объекта, отличающийся тем, что регистрируют излучения трех лазерных меток с широкой диаграммой направленности, установленных на ведущем ЛА группы посредством бортовой фотокамеры ведомого ЛА, осуществляют обработку оцифрованного изображения лазерных меток для определения координат их изображений на фотоматрице, определяют линейные и угловые координаты взаимного расположения ведущего и ведомого летательных аппаратов, посредством видеокамер ведущего и ведомого выполняют фотоэкспонирование, стереоотождествление и определение координат изображений трех особых точек земной поверхности, не лежащих на одной прямой в моменты двух последовательных фотоэкспозиций фотокамер, вычисляют приращение линейных и угловых координат одного из ЛА относительно земной поверхности за время полета, вычисляют местоположение ЛА с учетом его начальных координат.
| Способ навигации подвижного объекта | 2016 |
|
RU2626017C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| CN 108955722 A, 2018.12.07 | |||
| US 2015301529 A1, 2015.10.22 | |||
| В.Г | |||
| БОНДАРЕВ, ВИДЕОНАВИГАЦИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, НАУЧНЫЙ ВЕСТНИК МГТУ ГА, N213, 2015. | |||

